
Forest Restoration Monitoring Protocol with a Low-Cost Remotely Piloted Aircraft: Lessons Learned from a Case Study in the Brazilian Atlantic Forest

 , , , , , , ,
, , , , , , ,
Abstract
:
1. Introduction
2. Materials and Methods
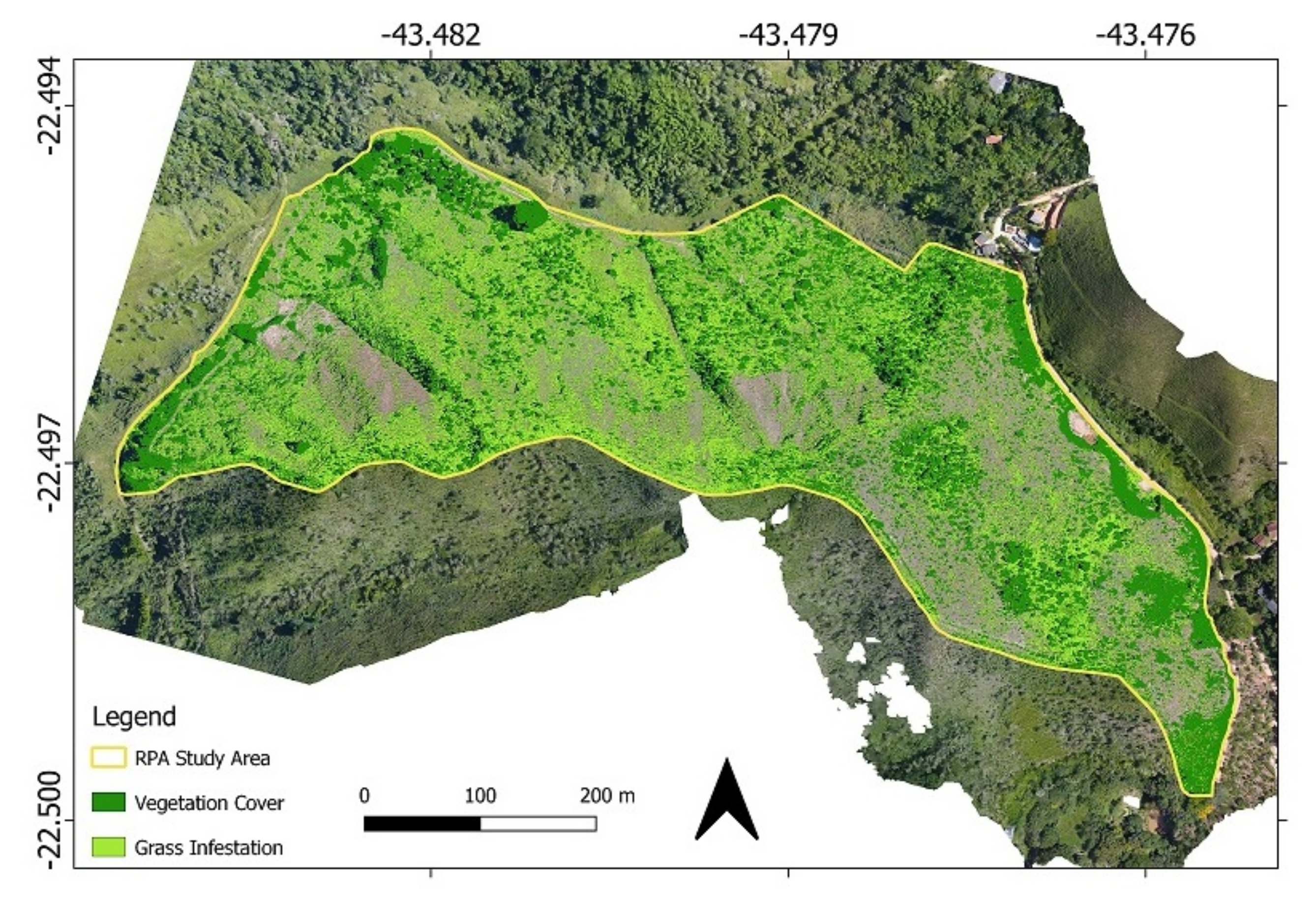
2.1. Study Area
2.2. Materials
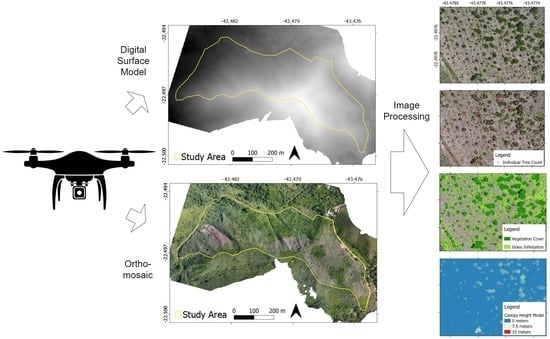
2.3. Methods
2.3.1. Flight Patterns
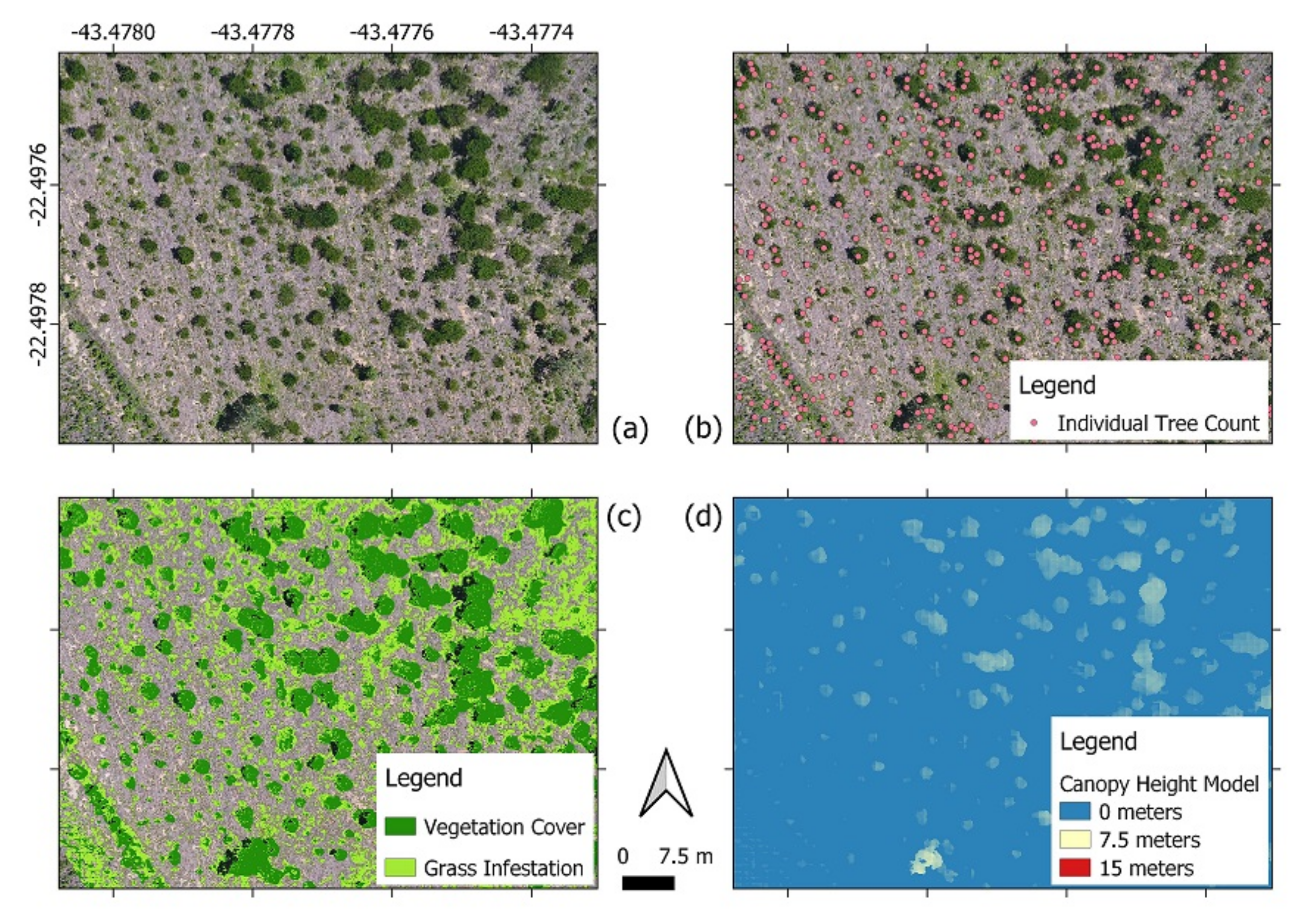
2.3.2. Estimation of Forest Restoration Biodiversity Using Low-Cost RPA
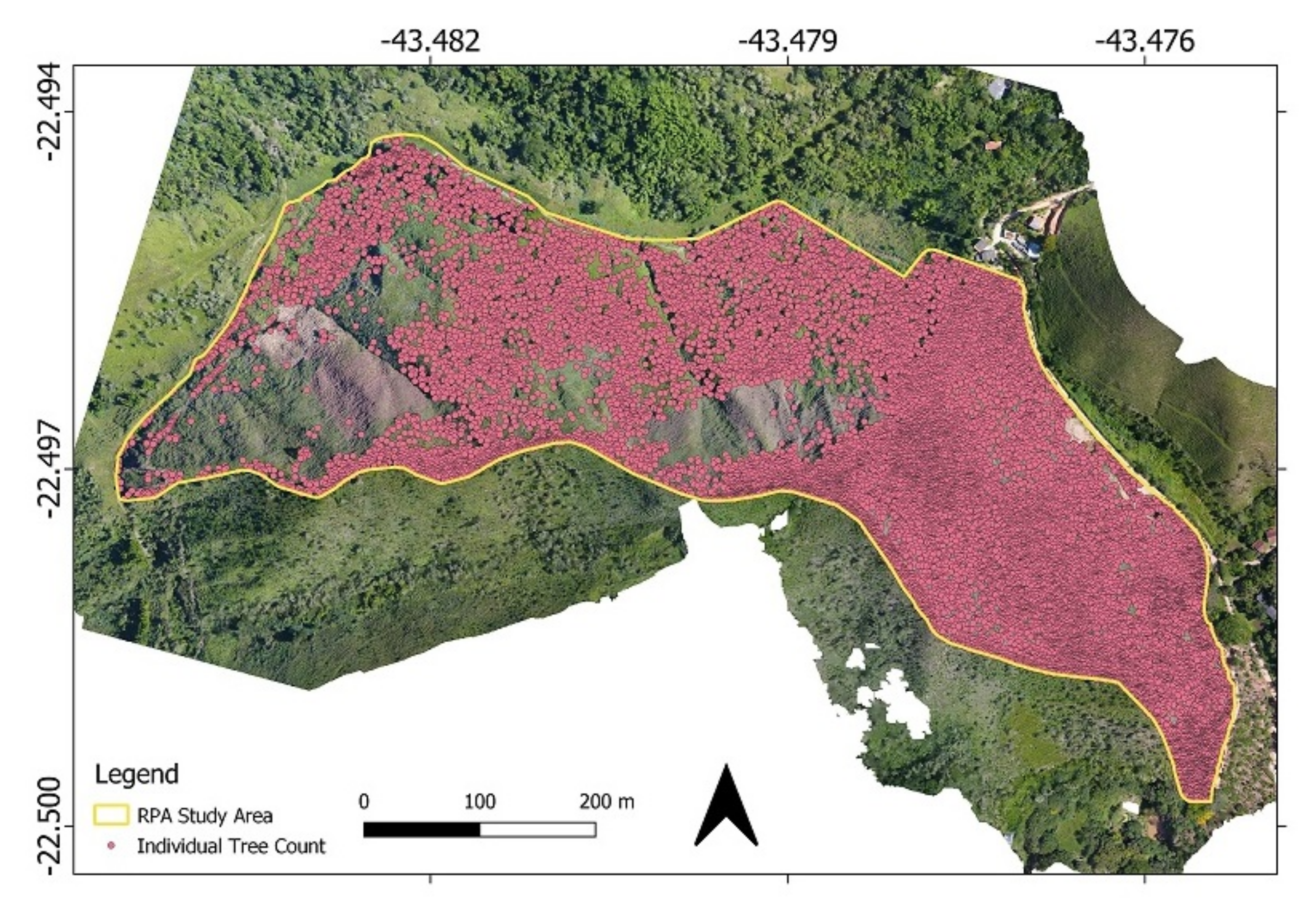
2.3.3. FR Structural Parameter: Tree Density

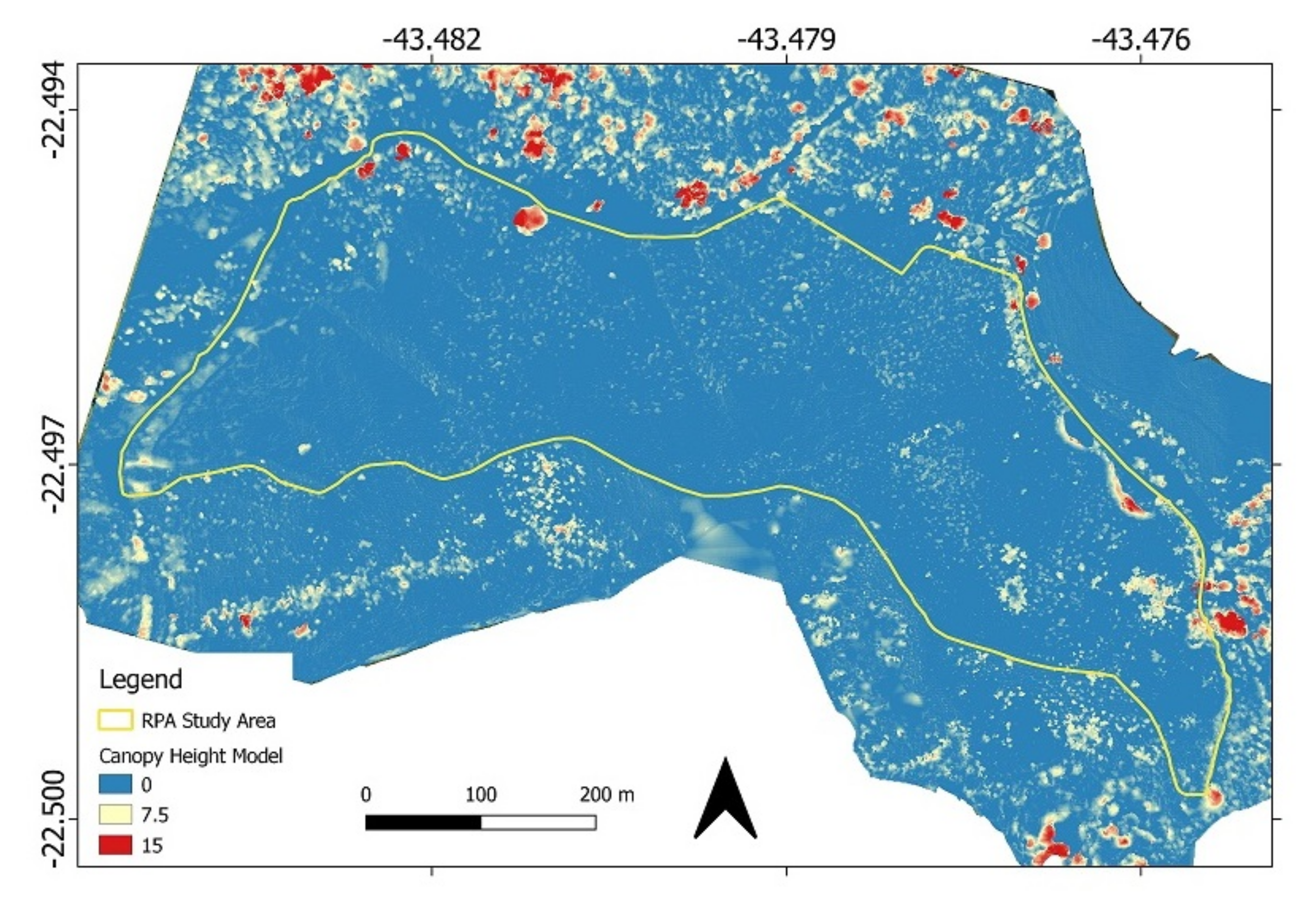
2.3.4. FR Structural Parameter: Tree Height
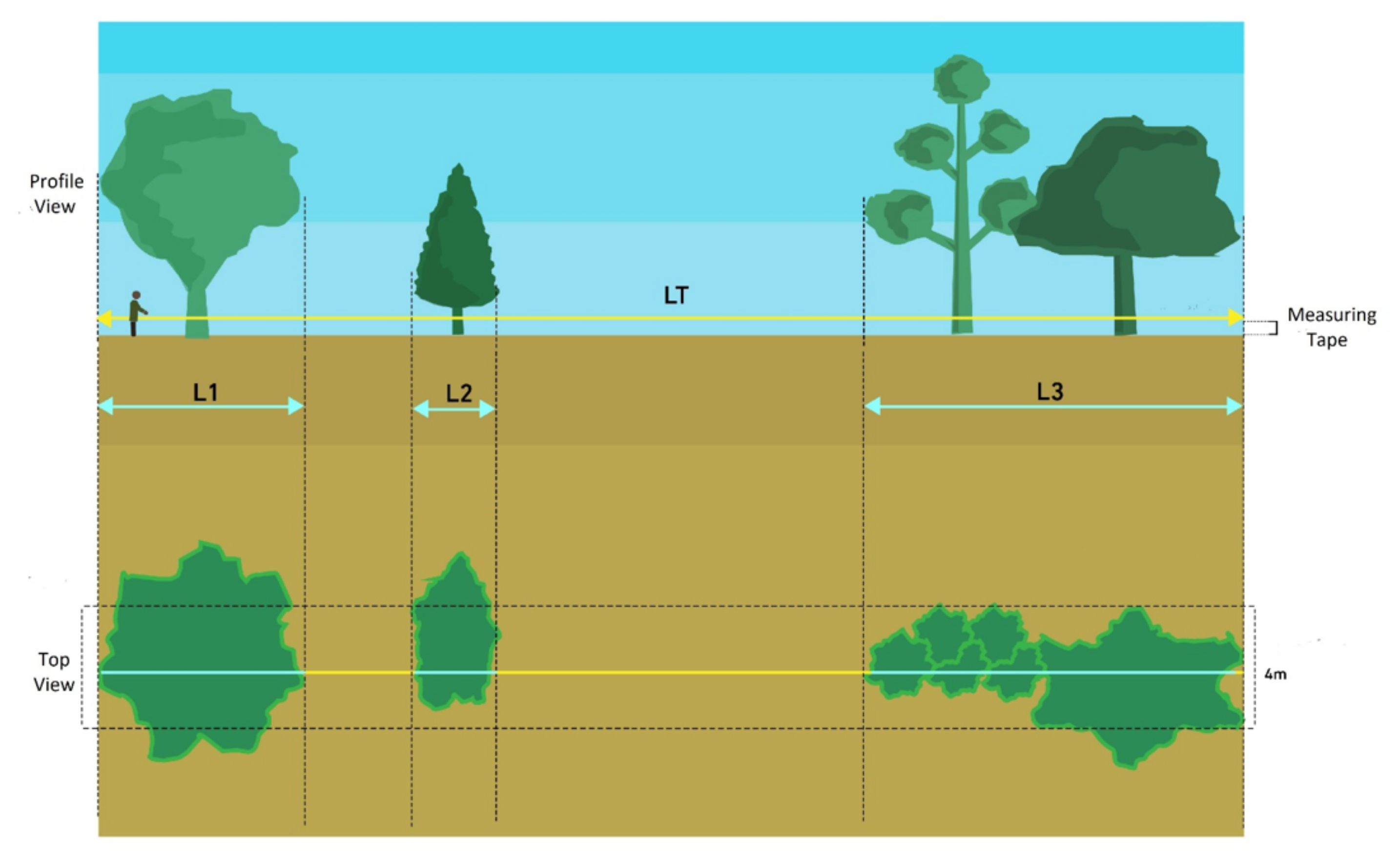
2.3.5. FR Structural Parameter: Vegetation Cover
2.3.6. FR Structural Parameter: Grass Infestation
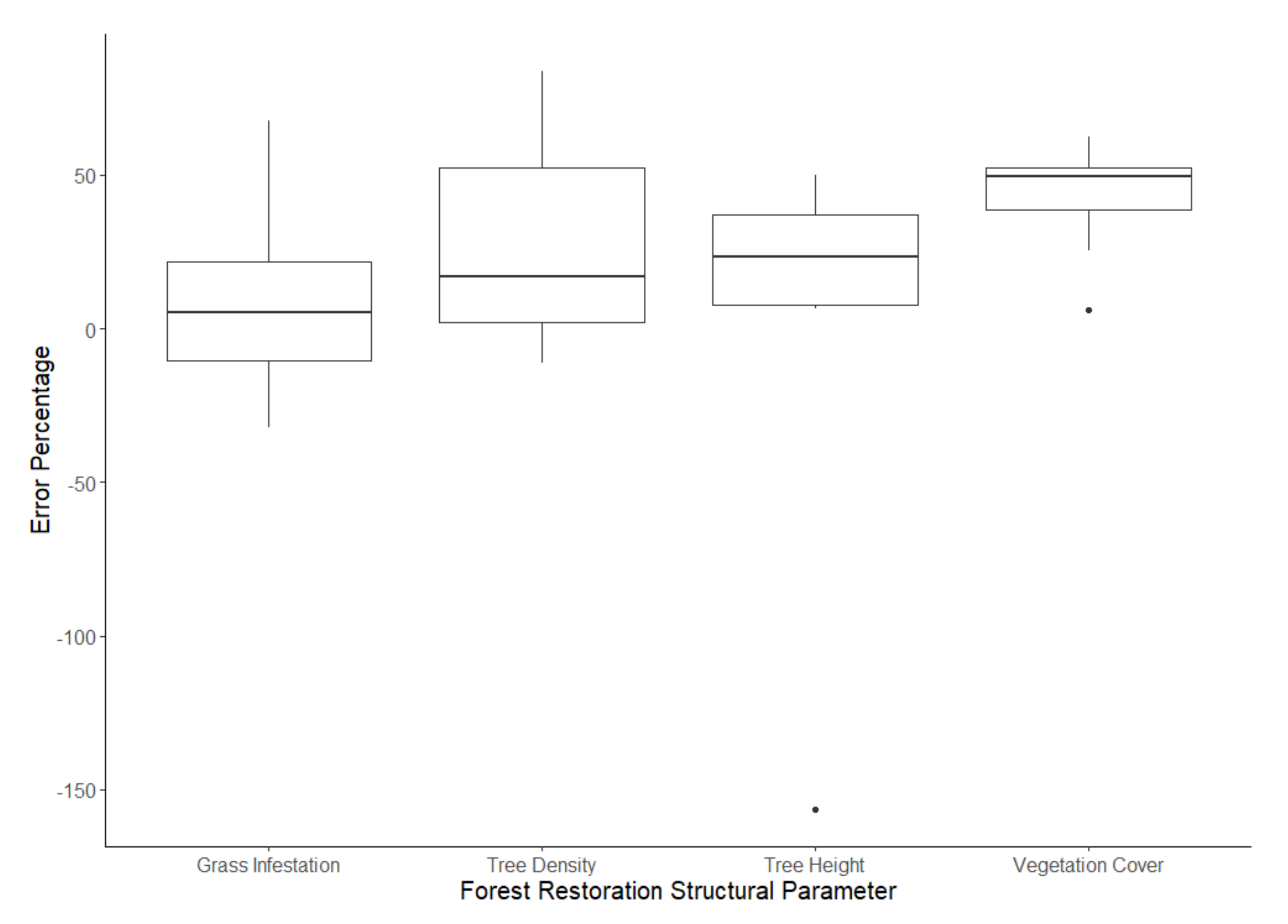
2.3.7. Accuracy Evaluation
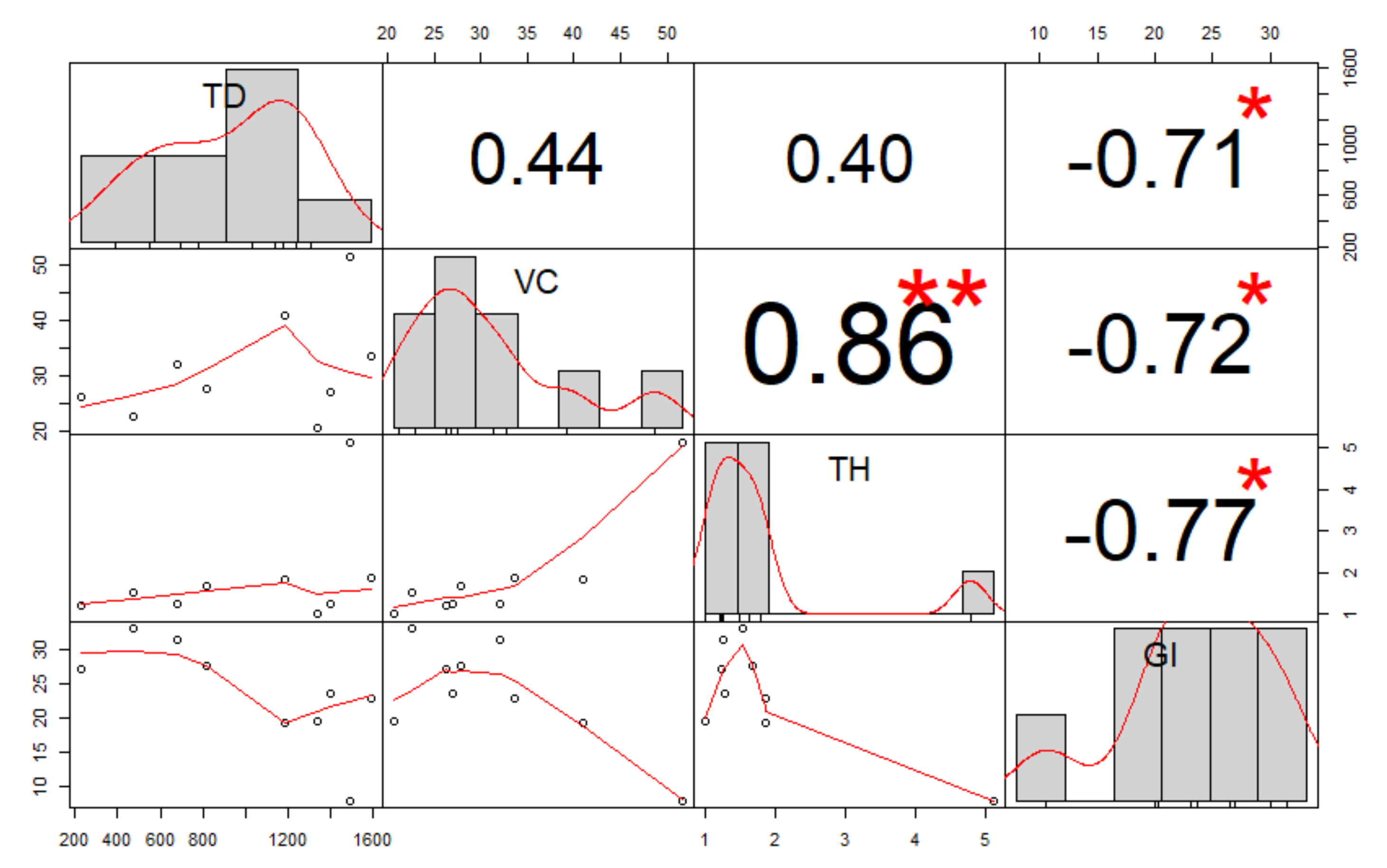
2.3.8. Evaluating FR Structural Parameters Values in Stretches with Different FR Success
3. Results
3.1. Vegetation Cover and Grass Infestation Accuracy
3.2. Tree Density Accuracy
3.3. Tree Height Accuracy
3.4. FR Structural Parameters Values in Stretches with Different FR Success
4. Discussion: Lessons Learned
4.1. Low-Cost RPA Is Capable of Accurately Mapping Forest Restoration (FR) Structural Parameters in Open Canopy Conditions
4.2. To Improve the Accuracy of the Tree Height Measurement by Low-Cost RPA in All the FR Stages, a Possible but Expensive Solution Would Be Using Precise Global Navigation Satellite System (GNSS) Data
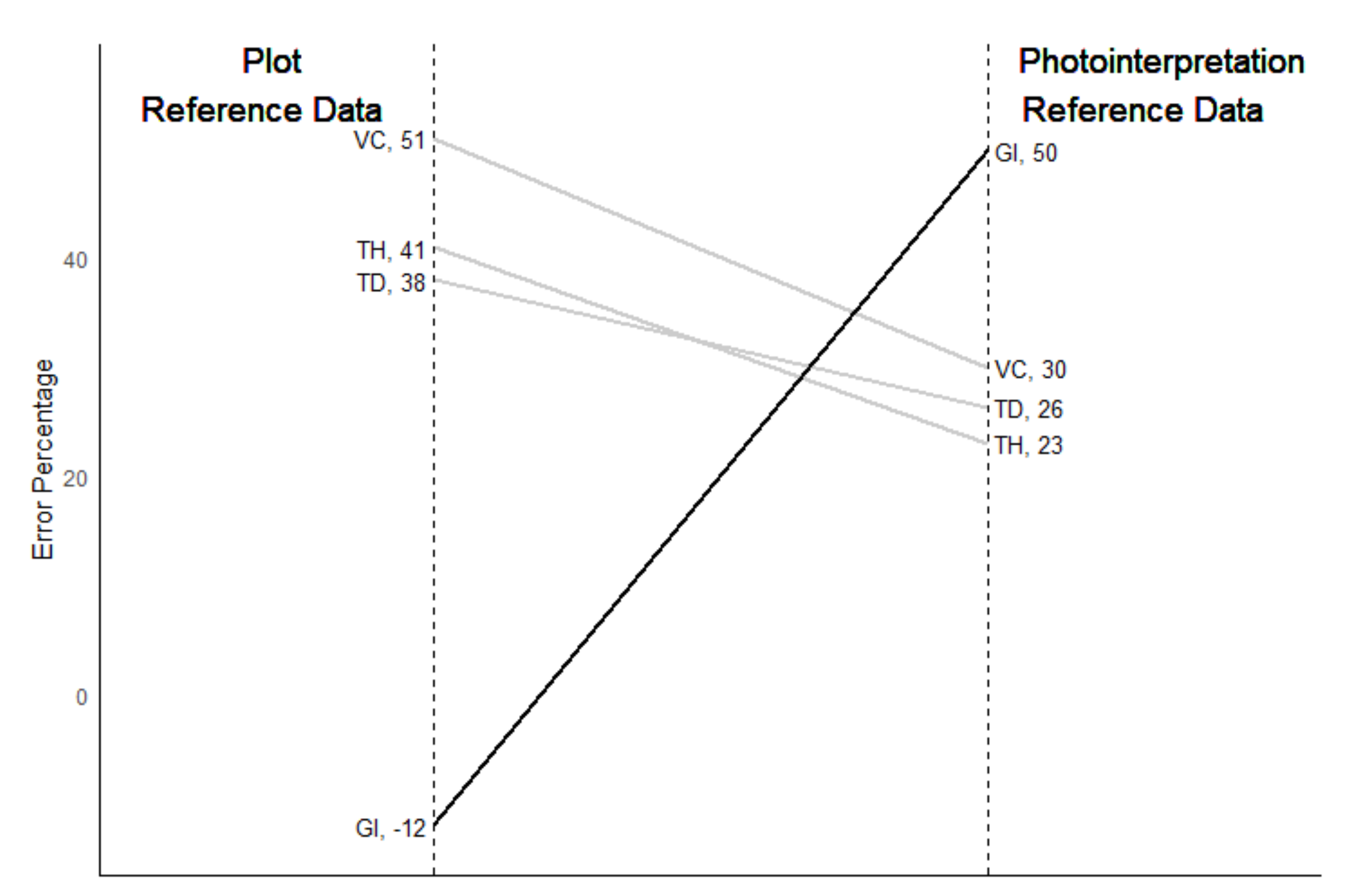
4.3. Via Photointerpretation, RPA Can Identify Stretches with Different FR Success That Present Different Values of FR Structural Parameters
4.4. RGB Limitations for Identifying Different Tree Species Reinforced That Biodiversity and Remote Sensing Constitute a Specific Field of Research and That Traditional Fieldwork Will Continue Being Necessary in the Future
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
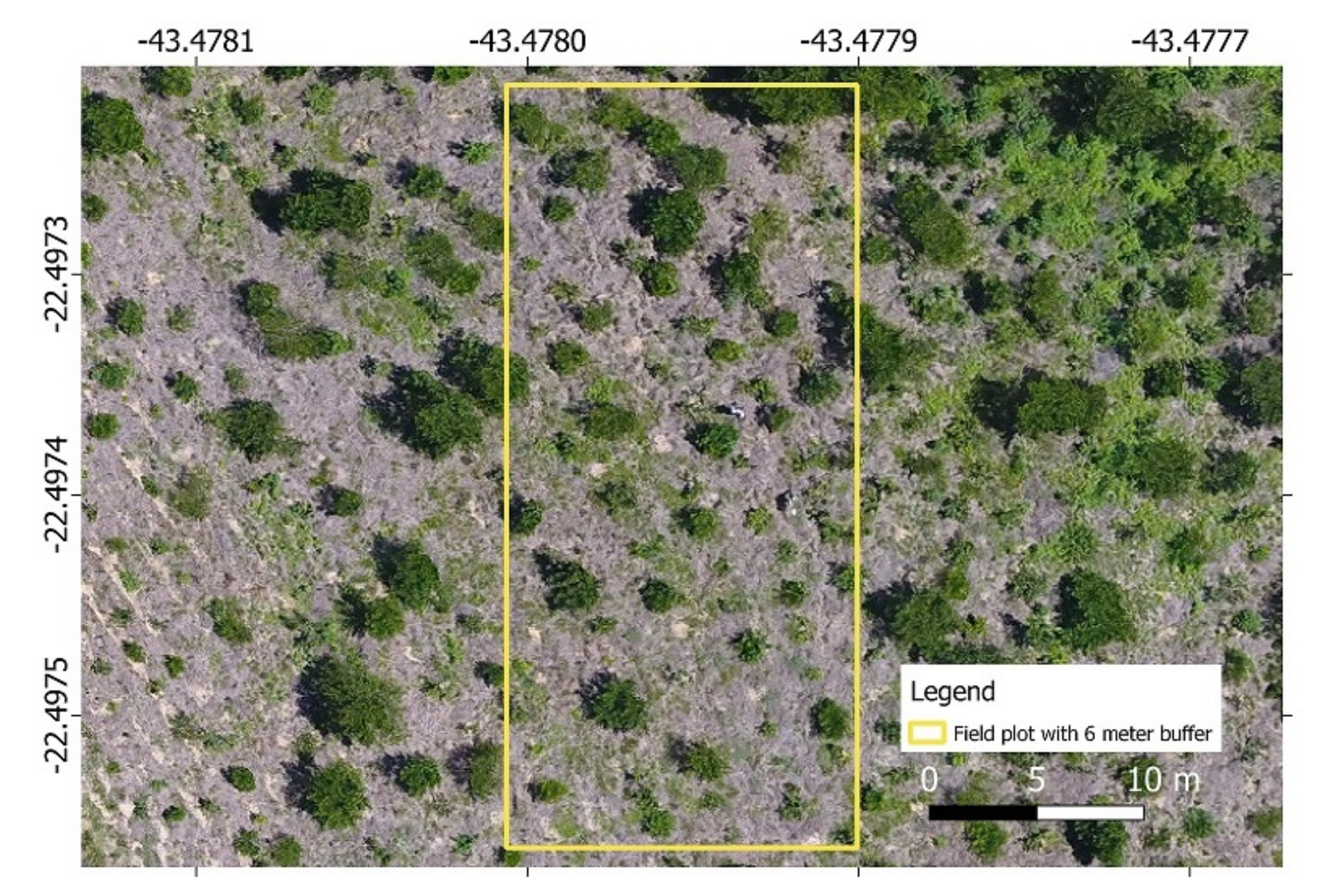
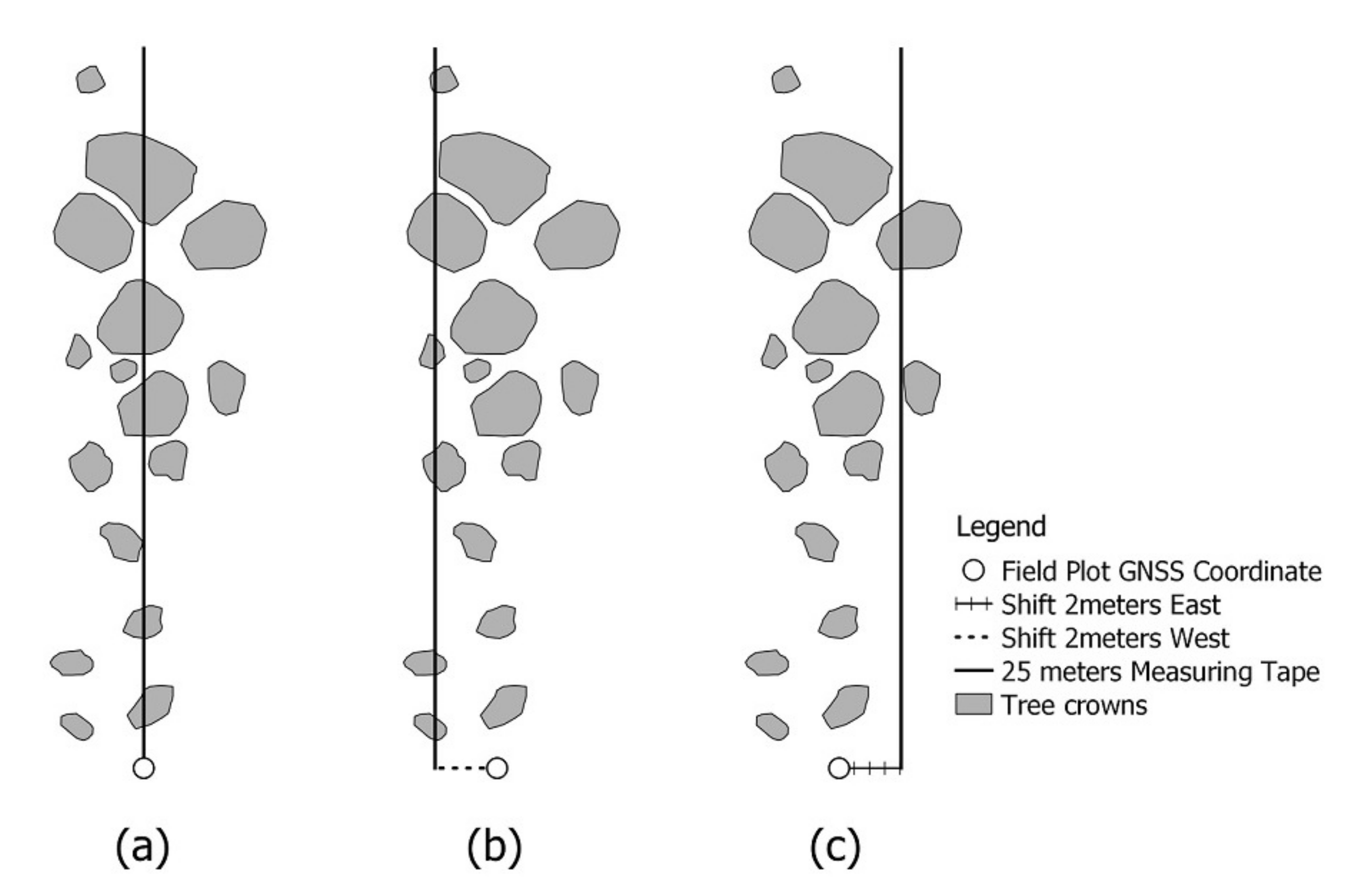
Appendix A. Field Plot Replication in RPA Imagery
Appendix A.1. Methods: Field Plot Replication in RPA Imagery


Appendix A.2. FR Structural Parameters Accuracy Evaluation Inside Field Plots
Appendix A.3. Results: RPA and Fieldwork Data Comparison Inside Field Plot Rectangles

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FR Structural Parameter | RPA | Fieldwork |
|---|---|---|
| Vegetation Cover (%) | 27.80 | 55 |
| Tree Density (trees/hectare) | 814 | 1428 |
| Tree Height (meters) | 1.68 | 2 |
| Grass Infestation (%) | 27.57 | 25 |


Appendix A.4. Discussion: Lessons Learned when Replicating Field Plots in RPA Imagery
References
- Holton, A.E.; Lawson, S.; Love, C. Unmanned Aerial Vehicles: Opportunities, barriers, and the future of “drone journalism”. J. Pract. 2015, 9, 634–650. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2020, 100187. [Google Scholar] [CrossRef]
- Viani, R.; Rodrigues, R.; Padovezi, A.; Turini Farah, F.; Garcia, L.; Sanglade, L.; Brancalion, P.; Chaves, R.; Barreto, T.; Strassburg, B.; et al. Monitoring Protocol for Forest Restoration Programs & Projects. 2013, p. 61. Available online: https://www.researchgate.net/publication/304073085_Pacto_pela_restauracao_da_Mata_Atlantica_-_Protocolo_de_monitoramento_para_programas_e_projetos_de_restauracao_florestal (accessed on 17 June 2021).
- Viani, R.A.; Holl, K.D.; Padovezi, A.; Strassburg, B.B.; Farah, F.T.; Garcia, L.C.; Chaves, R.B.; Rodrigues, R.R.; Brancalion, P.H. Protocol for monitoring tropical forest restoration: Perspectives from the Atlantic Forest Restoration Pact in Brazil. Trop. Conserv. Sci. 2017, 10, 1940082917697265. [Google Scholar] [CrossRef] [Green Version]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Zahawi, R.A.; Dandois, J.P.; Holl, K.D.; Nadwodny, D.; Reid, J.L.; Ellis, E.C. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biol. Conserv. 2015, 186, 287–295. [Google Scholar] [CrossRef] [Green Version]
- McDonald, T.; Gann, G.; Jonson, J.; Dixon, K. International Standards for The Practice of Ecological Restoration—Including Principles and Key Concepts; Technical Report; Society for Ecological Restoration: Washington, DC, USA, 2016; Available online: http://www.seraustralasia.com/wheel/image/SER_International_Standards.pdf (accessed on 9 August 2019).
- Myers, N.; Mittermeier, R.A.; Mittermeier, C.G.; Da Fonseca, G.A.; Kent, J. Biodiversity hotspots for conservation priorities. Nature 2000, 403, 853. [Google Scholar] [CrossRef] [PubMed]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Mlambo, R.; Woodhouse, I.; Gerard, F.; Anderson, K. Structure from motion (SfM) photogrammetry with drone data: A low cost method for monitoring greenhouse gas emissions from forests in developing countries. Forests 2017, 8, 68. [Google Scholar] [CrossRef] [Green Version]
- INEA. Manual de Procedimentos para o Monitoramento e Avaliação de áreas em Restauração Florestal no Estado do Rio de Janeiro. Technical Report, Instituto Estadual do Ambiente. 2019. Available online: http://www.inea.rj.gov.br/wp-content/uploads/2019/05/Manual-Monitoramento-%C3%81reas-Reflorestadas_WEB.pdf (accessed on 10 September 2019).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013; Available online: http://www.R-project.org/ (accessed on 17 June 2021).
- Agência Nacional de Aviação Civil (ANAC). Requisitos gerais para aeronaves não tripuladas de uso civil. Resolução número 419, de 2 de maio de 2017. Regulamento Brasileiro da Aviação Civil Especial, RBAC-E número 94. 2017. Available online: https://www.anac.gov.br/assuntos/legislacao/legislacao-1/rbha-e-rbac/rbac/rbac-e-94/@@display-file/arquivo_norma/RBACE94EMD00.pdf (accessed on 17 June 2021).
- Albuquerque, R.W.; Costa, M.O.; Ferreira, M.E.; Carrero, G.C.; Grohmann, C.H. Remotely piloted aircraft imagery for automatic tree counting in forest restoration areas: A case study in the Amazon. J. Unmanned Veh. Syst. 2020, 8, 207–223. [Google Scholar] [CrossRef]
- Júnior, L.R.A.; Ferreira, M.E.; Côrtes, J.B.R.; de Castro Jorge, L.A. High accuracy mapping with cartographic assessment for a fixed-wing remotely piloted aircraft system. J. Appl. Remote Sens. 2018, 12, 014003. [Google Scholar]
- Hung, I.-K.; Unger, D.; Kulhavy, D.; Zhang, Y. Positional precision analysis of orthomosaics derived from drone captured aerial imagery. Drones 2019, 3, 46. [Google Scholar] [CrossRef] [Green Version]
- Mohan, M.; Silva, C.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.; Dia, M. Individual tree detection from unmanned aerial vehicle (UAV) derived canopy height model in an open canopy mixed conifer forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Dong, P. A new method for generating canopy height models from discrete-return LiDAR point clouds. Remote Sens. Lett. 2014, 5, 575–582. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of individual Longleaf Pine (Pinus palustris Mill.) Tree attributes from field and LiDAR data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Silva, C.A.; Crookston, N.L.; Hudak, A.T.; Vierling, L.A.; Klauberg, C.; Silva, M.C.A. Package ‘rLiDAR’. 2017. Available online: https://cran.r-project.org/web/packages/rLiDAR/rLiDAR.pdf (accessed on 1 September 2019).
- Oliveira, E.C.L.; Felfili, J.M. Estrutura e dinâmica da regeneração natural de uma mata de galeria no Distrito Federal, Brasil. Acta Bot. Bras 2005, 19, 801–811. [Google Scholar] [CrossRef] [Green Version]
- Barbosa, B.; Ferraz, G.; Gonçalves, L.; Marin, D.; Maciel, D.; Ferraz, P.; Rossi, G. RGB vegetation indices applied to grass monitoring: A qualitative analysis. Agron. Res. 2019, 17, 349–357. [Google Scholar]
- Reis, B.P.; Martins, S.V.; Fernandes Filho, E.I.; Sarcinelli, T.S.; Gleriani, J.M.; Leite, H.G.; Halassy, M. Forest restoration monitoring through digital processing of high resolution images. Ecol. Eng. 2019, 127, 178–186. [Google Scholar] [CrossRef] [Green Version]
- Laliberte, A.S.; Browning, D.; Rango, A. A comparison of three feature selection methods for object-based classification of sub-decimeter resolution UltraCam-L imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 15, 70–78. [Google Scholar] [CrossRef]
- Hunt, E.R.; Doraiswamy, P.C.; McMurtrey, J.E.; Daughtry, C.S.; Perry, E.M.; Akhmedov, B. A visible band index for remote sensing leaf chlorophyll content at the canopy scale. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 103–112. [Google Scholar] [CrossRef] [Green Version]
- Grohmann, C.H.; Smith, M.J.; Riccomini, C. Multiscale analysis of topographic surface roughness in the Midland Valley, Scotland. IEEE Trans. Geosci. Remote Sens. 2010, 49, 1200–1213. [Google Scholar] [CrossRef] [Green Version]
- Torres-Sánchez, J.; López-Granados, F.; Borra-Serrano, I.; Peña, J.M. Assessing UAV-collected image overlap influence on computation time and digital surface model accuracy in olive orchards. Precis. Agric. 2018, 19, 115–133. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote. Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Schonberger, J.L.; Frahm, J.M. Structure-from-motion revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar]
- Crouzeilles, R.; Santiami, E.; Rosa, M.; Pugliese, L.; Brancalion, P.H.; Rodrigues, R.R.; Metzger, J.P.; Calmon, M.; Scaramuzza, C.A.D.M.; Matsumoto, M.H.; et al. There is hope for achieving ambitious Atlantic Forest restoration commitments. Perspect. Ecol. Conserv. 2019, 17, 80–83. [Google Scholar] [CrossRef]
- Ferreira, M.P.; de Almeida, D.R.A.; de Almeida Papa, D.; Minervino, J.B.S.; Veras, H.F.P.; Formighieri, A.; Santos, C.A.N.; Ferreira, M.A.D.; Figueiredo, E.O.; Ferreira, E.J.L. Individual tree detection and species classification of Amazonian palms using UAV images and deep learning. For. Ecol. Manag. 2020, 475, 118397. [Google Scholar] [CrossRef]
- Schiefer, F.; Kattenborn, T.; Frick, A.; Frey, J.; Schall, P.; Koch, B.; Schmidtlein, S. Mapping forest tree species in high resolution UAV-based RGB-imagery by means of convolutional neural networks. ISPRS J. Photogramm. Remote Sens. 2020, 170, 205–215. [Google Scholar] [CrossRef]
- Florenzano, T.G. Imagens de Satélite Para Estudos Ambientais; Oficina de Textos: São Paulo, Brazil, 2002; p. 97. [Google Scholar]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. In European Conference on Information Retrieval; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- Keith, K.; Nicholson, D.; Rogers, D. Accuracy and precision of low-dose insulin administration using syringes, pen injectors, and a pump. Clin. Pediatr. 2004, 43, 69–74. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, J.; Lian, J.; Fan, Z.; Ouyang, X.; Ye, W. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biol. Conserv. 2016, 198, 60–69. [Google Scholar] [CrossRef]
- Nixon, M.; Aguado, A. Feature Extraction and Image Processing for Computer Vision; Academic Press: Cambridge, MA, USA, 2019; p. 626. [Google Scholar]
- Braga, J.; Peripato, V.; Dalagnol, R.; Ferreira, M.; Tarabalka, Y.; Aragão, L.; de Campos Velho, H.; Shiguemori, E.; Wagner, F. Tree Crown Delineation Algorithm Based on a Convolutional Neural Network. Remote Sens. 2020, 12, 1288. [Google Scholar] [CrossRef] [Green Version]
- Wagner, F.H.; Sanchez, A.; Tarabalka, Y.; Lotte, R.G.; Ferreira, M.P.; Aidar, M.P.; Gloor, E.; Phillips, O.L.; Aragao, L.E. Using the U-net convolutional network to map forest types and disturbance in the Atlantic rainforest with very high resolution images. Remote Sens. Ecol. Conserv. 2019, 5, 360–375. [Google Scholar] [CrossRef] [Green Version]
- Wagner, F.H.; Sanchez, A.; Aidar, M.P.; Rochelle, A.L.; Tarabalka, Y.; Fonseca, M.G.; Phillips, O.L.; Gloor, E.; Aragão, L.E. Mapping Atlantic rainforest degradation and regeneration history with indicator species using convolutional network. PLoS ONE 2020, 15, e0229448. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, M.P.; Lotte, R.G.; D’Elia, F.V.; Stamatopoulos, C.; Kim, D.H.; Benjamin, A.R. Accurate mapping of Brazil nut trees (Bertholletia excelsa) in Amazonian forests using WorldView-3 satellite images and convolutional neural networks. Ecol. Inform. 2021, 63, 101302. [Google Scholar] [CrossRef]
- Belmonte, A.; Sankey, T.; Biederman, J.A.; Bradford, J.; Goetz, S.J.; Kolb, T.; Woolley, T. UAV-derived estimates of forest structure to inform ponderosa pine forest restoration. Remote Sens. Ecol. Conserv. 2020, 6, 181–197. [Google Scholar] [CrossRef]
- Chen, S.; McDermid, G.; Castilla, G.; Linke, J. Measuring vegetation height in linear disturbances in the boreal forest with UAV photogrammetry. Remote Sens. 2017, 9, 1257. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Assessment of individual tree detection and canopy cover estimation using unmanned aerial vehicle based light detection and ranging (UAV-LiDAR) data in planted forests. Remote Sens. 2019, 11, 908. [Google Scholar] [CrossRef] [Green Version]
- Camarretta, N.; Harrison, P.A.; Bailey, T.; Potts, B.; Lucieer, A.; Davidson, N.; Hunt, M. Monitoring forest structure to guide adaptive management of forest restoration: A review of remote sensing approaches. New For. 2020, 51, 573–596. [Google Scholar] [CrossRef]
- Madasa, A.; Orimoloye, I.R.; Ololade, O.O. Application of geospatial indices for mapping land cover/use change detection in a mining area. J. Afr. Earth Sci. 2021, 175, 104108. [Google Scholar] [CrossRef]
- Krause, S.; Sanders, T.G.; Mund, J.P.; Greve, K. UAV-based photogrammetric tree height measurement for intensive forest monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef] [Green Version]
- Ferrer-González, E.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Martínez-Carricondo, P. UAV Photogrammetry Accuracy Assessment for Corridor Mapping Based on the Number and Distribution of Ground Control Points. Remote Sens. 2020, 12, 2447. [Google Scholar] [CrossRef]
- Nie, Z.; Liu, F.; Gao, Y. Real-time precise point positioning with a low-cost dual-frequency GNSS device. GPS Solut. 2020, 24, 1–11. [Google Scholar] [CrossRef]
- Martins, A.C.; Willig, M.R.; Presley, S.J.; Marinho-Filho, J. Effects of forest height and vertical complexity on abundance and biodiversity of bats in Amazonia. For. Ecol. Manag. 2017, 391, 427–435. [Google Scholar] [CrossRef]
- Almeida, D.R.A.D.; Stark, S.C.; Chazdon, R.; Nelson, B.W.; César, R.G.; Meli, P.; Gorgens, E.; Duarte, M.M.; Valbuena, R.; Moreno, V.S.; et al. The effectiveness of lidar remote sensing for monitoring forest cover attributes and landscape restoration. For. Ecol. Manag. 2019, 438, 34–43. [Google Scholar] [CrossRef]
- Ferreira, J.; Lennox, G.D.; Gardner, T.A.; Thomson, J.R.; Berenguer, E.; Lees, A.C.; Mac Nally, R.; Aragão, L.E.; Ferraz, S.F.; Louzada, J.; et al. Carbon-focused conservation may fail to protect the most biodiverse tropical forests. Nat. Clim. Chang. 2018, 8, 744–749. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.S. Evaluating tree detection and segmentation routines on very high resolution UAV LiDAR data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7619–7628. [Google Scholar] [CrossRef]
- Eugenio, F.C.; Schons, C.T.; Mallmann, C.L.; Schuh, M.S.; Fernandes, P.; Badin, T.L. Remotely piloted aircraft systems and forests: A global state of the art and future challenges. Can. J. For. Res. 2020, 50, 705–716. [Google Scholar] [CrossRef]
- Schowengerdt, R.A. Remote Sensing: Models and Methods for Image Processing, 3rd ed.; Academic Press: Orlando, FL, USA, 2007; p. 515. [Google Scholar]
- Alonzo, M.; Bookhagen, B.; Roberts, D.A. Urban tree species mapping using hyperspectral and lidar data fusion. Remote Sens. Environ. 2014, 148, 70–83. [Google Scholar] [CrossRef]
- Araujo, L.; Vicente, L.E.; Manzatto, C.V.; Skorupa, L.A.; Victoria, D.D.C.; Soares, A.R. AgroTag: Um sistema de coleta, análise e compartilhamento de dados de campo para qualificação do uso e cobertura das terras no Brasil. In Proceedings of Simpósio Brasileiro de Sensoriamento Remoto (SBSR), 19; Gherardi, D.F.M., Sanches, I.D., e Cruz de Aragão, L.E.O., Eds.; INPE: São José dos Campos, Brazil, 2019; pp. 451–454. [Google Scholar]
- Das, P.; Ortega, L.; Vilà-Valls, J.; Vincent, F.; Chaumette, E.; Davain, L. Performance Limits of GNSS Code-Based Precise Positioning: GPS, Galileo & Meta-Signals. Sensors 2020, 20, 2196. [Google Scholar]
- Cottam, G.; Curtis, J.T. The use of distance measures in phytosociological sampling. Ecology 1956, 37, 451–460. [Google Scholar] [CrossRef]








| Target | ||||||
|---|---|---|---|---|---|---|
| Grass | Trees | Other Classes | Producer’s Accuracy | User’s Accuracy | ||
| Grass | 26 (52%) | 5 (10%) | 0 (0%) | 52% | 84% | |
| Prediction | Trees | 1 (2%) | 41 (82%) | 4 (8%) | 82% | 89% |
| Other Classes | 23 (46%) | 4 (8%) | 46 (92%) | 92% | 63% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Albuquerque, R.W.; Ferreira, M.E.; Olsen, S.I.; Tymus, J.R.C.; Balieiro, C.P.; Mansur, H.; Moura, C.J.R.; Costa, J.V.S.; Branco, M.R.C.; Grohmann, C.H. Forest Restoration Monitoring Protocol with a Low-Cost Remotely Piloted Aircraft: Lessons Learned from a Case Study in the Brazilian Atlantic Forest. Remote Sens. 2021, 13, 2401. https://doi.org/10.3390/rs13122401
Albuquerque RW, Ferreira ME, Olsen SI, Tymus JRC, Balieiro CP, Mansur H, Moura CJR, Costa JVS, Branco MRC, Grohmann CH. Forest Restoration Monitoring Protocol with a Low-Cost Remotely Piloted Aircraft: Lessons Learned from a Case Study in the Brazilian Atlantic Forest. Remote Sensing. 2021; 13(12):2401. https://doi.org/10.3390/rs13122401
Chicago/Turabian StyleAlbuquerque, Rafael Walter, Manuel Eduardo Ferreira, Søren Ingvor Olsen, Julio Ricardo Caetano Tymus, Cintia Palheta Balieiro, Hendrik Mansur, Ciro José Ribeiro Moura, João Vitor Silva Costa, Maurício Ruiz Castello Branco, and Carlos Henrique Grohmann. 2021. "Forest Restoration Monitoring Protocol with a Low-Cost Remotely Piloted Aircraft: Lessons Learned from a Case Study in the Brazilian Atlantic Forest" Remote Sensing 13, no. 12: 2401. https://doi.org/10.3390/rs13122401
APA StyleAlbuquerque, R. W., Ferreira, M. E., Olsen, S. I., Tymus, J. R. C., Balieiro, C. P., Mansur, H., Moura, C. J. R., Costa, J. V. S., Branco, M. R. C., & Grohmann, C. H. (2021). Forest Restoration Monitoring Protocol with a Low-Cost Remotely Piloted Aircraft: Lessons Learned from a Case Study in the Brazilian Atlantic Forest. Remote Sensing, 13(12), 2401. https://doi.org/10.3390/rs13122401