
The Potential of Satellite Sounding Observations for Deriving Atmospheric Wind in All-Weather Conditions

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Nature Runs
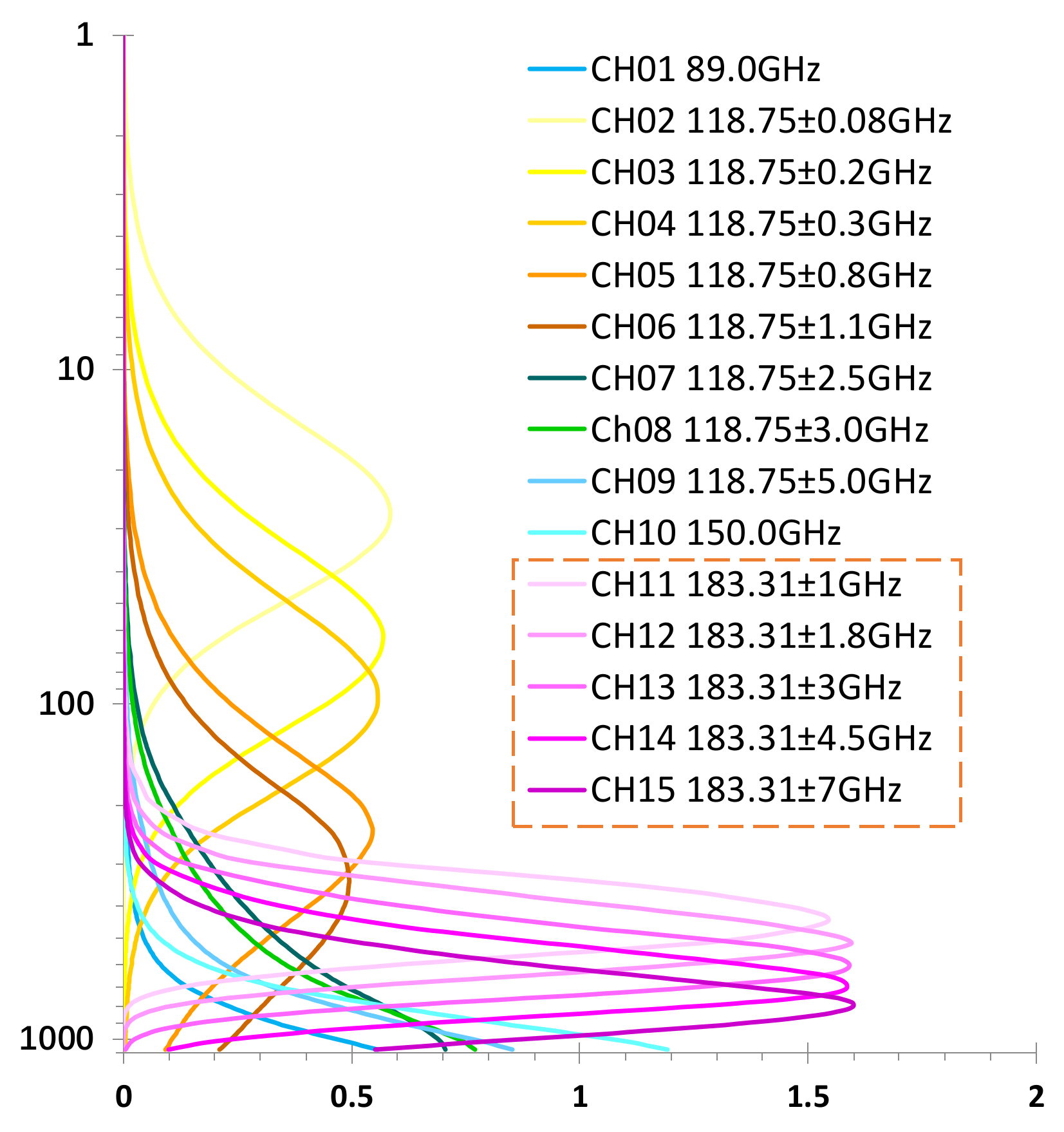
2.2. Simulated MWHS Brightness Temperature Data
2.3. Farneback OF Wind Track Algorithm
2.4. Quality Control Strategy
3. Results and Discussion
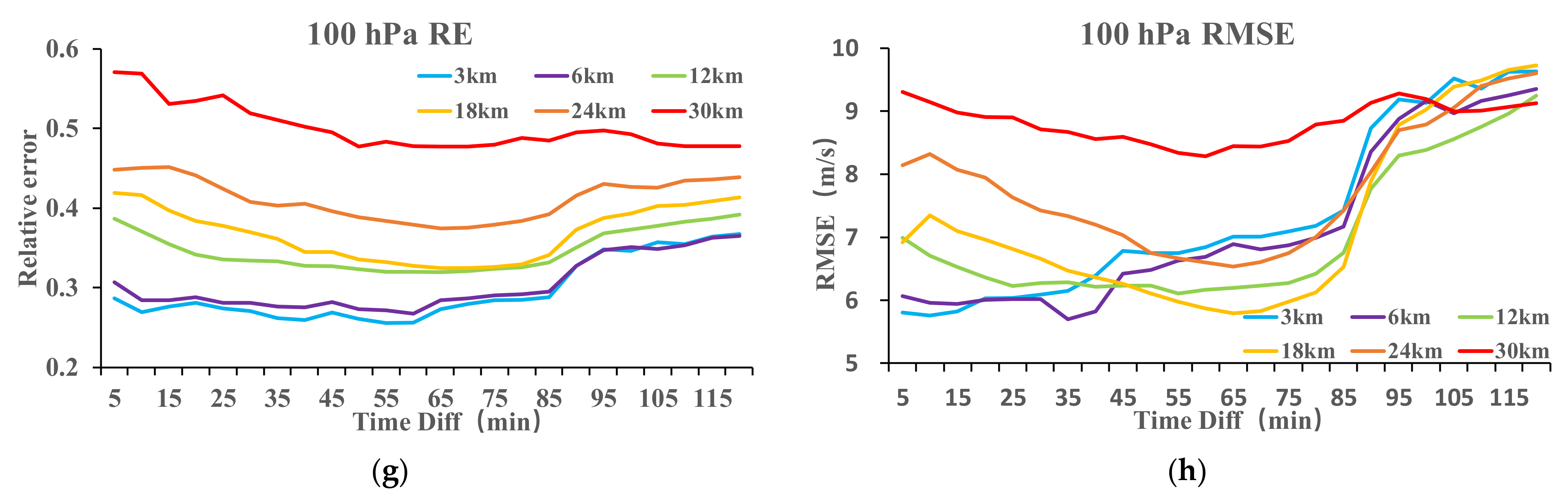
3.1. AMVs Sensitivity to FOV Sizes at Various Heights
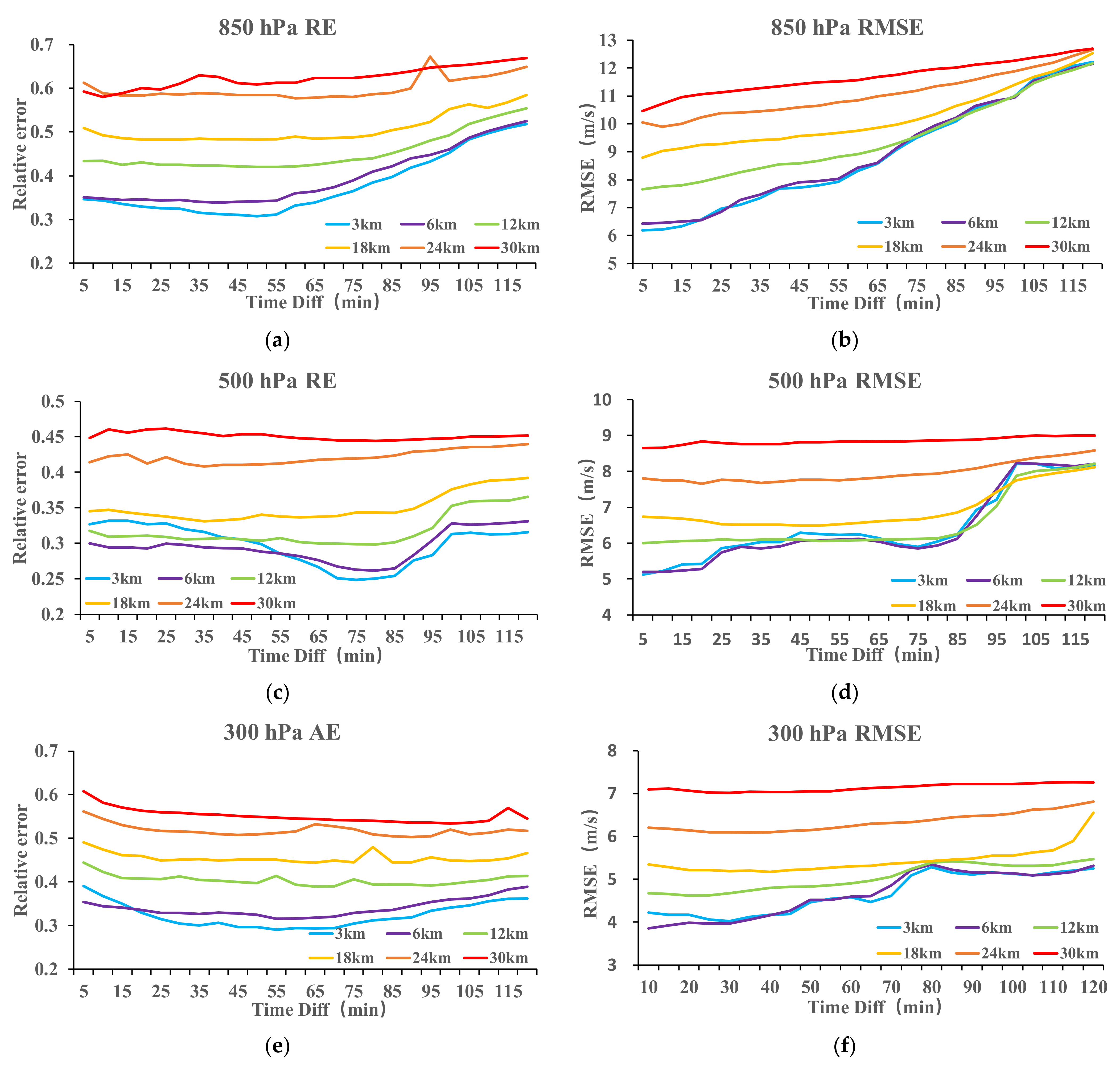
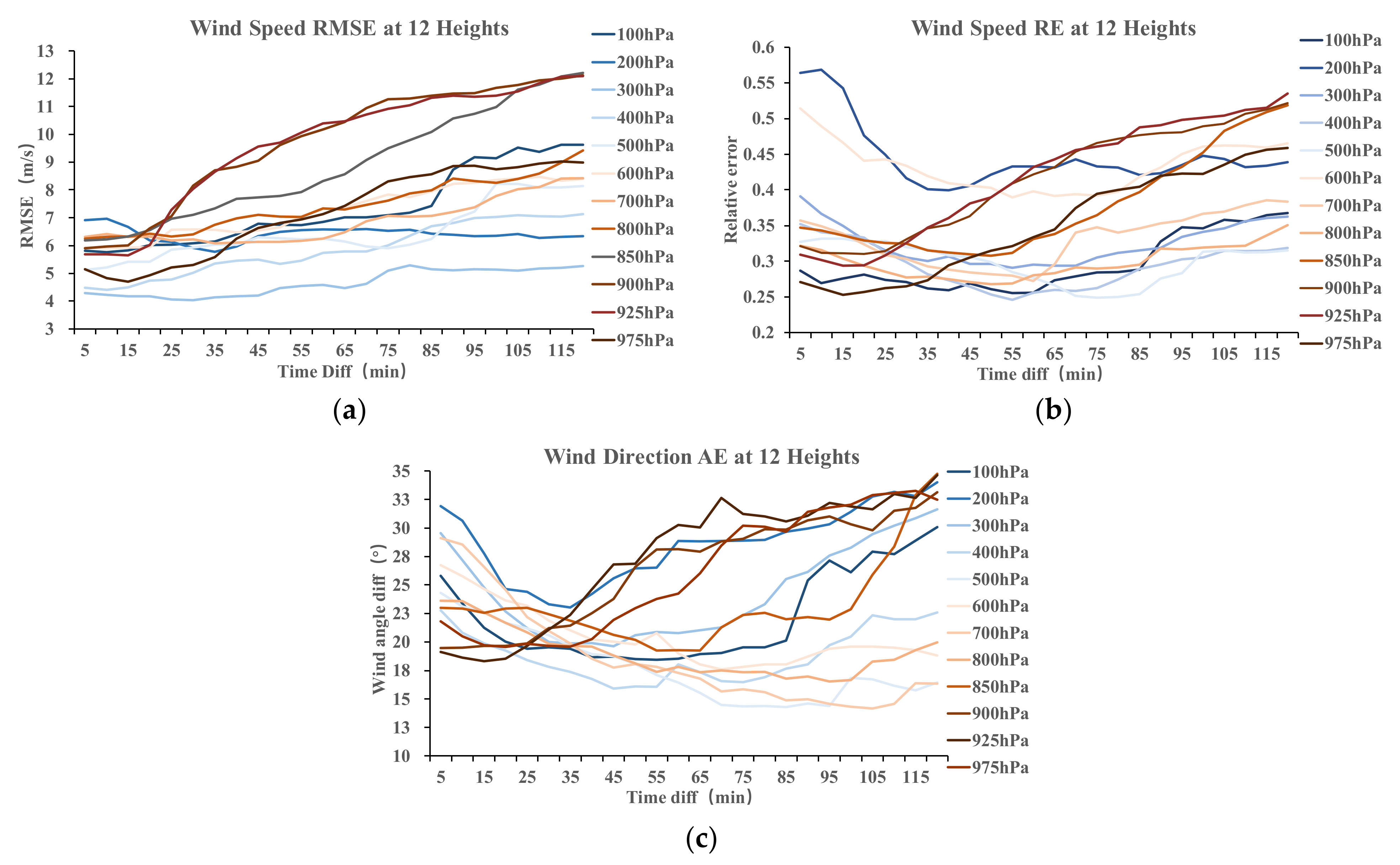
3.2. AMVs Sensitivity to Satellite Revisiting Time at Various Heights
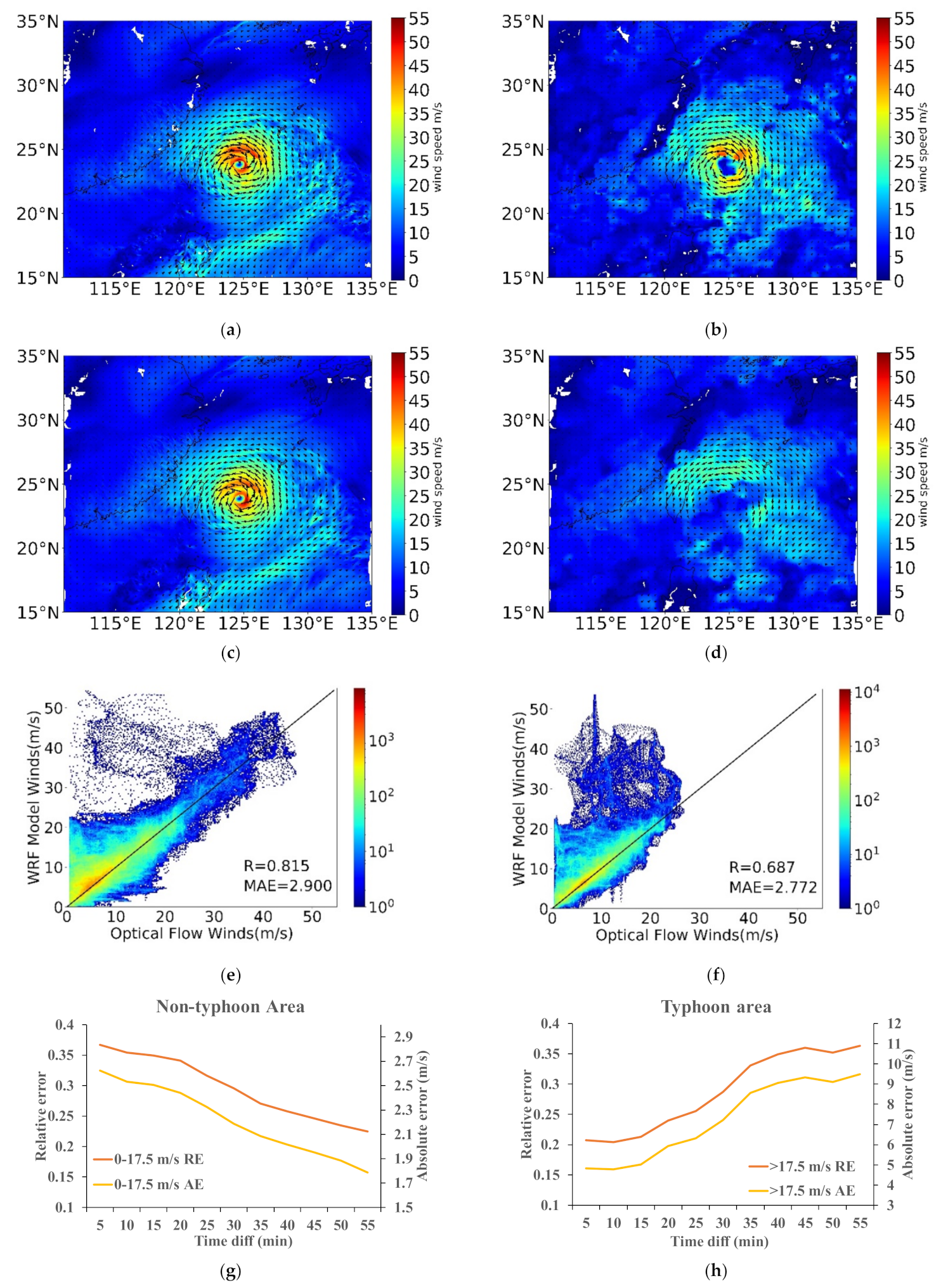
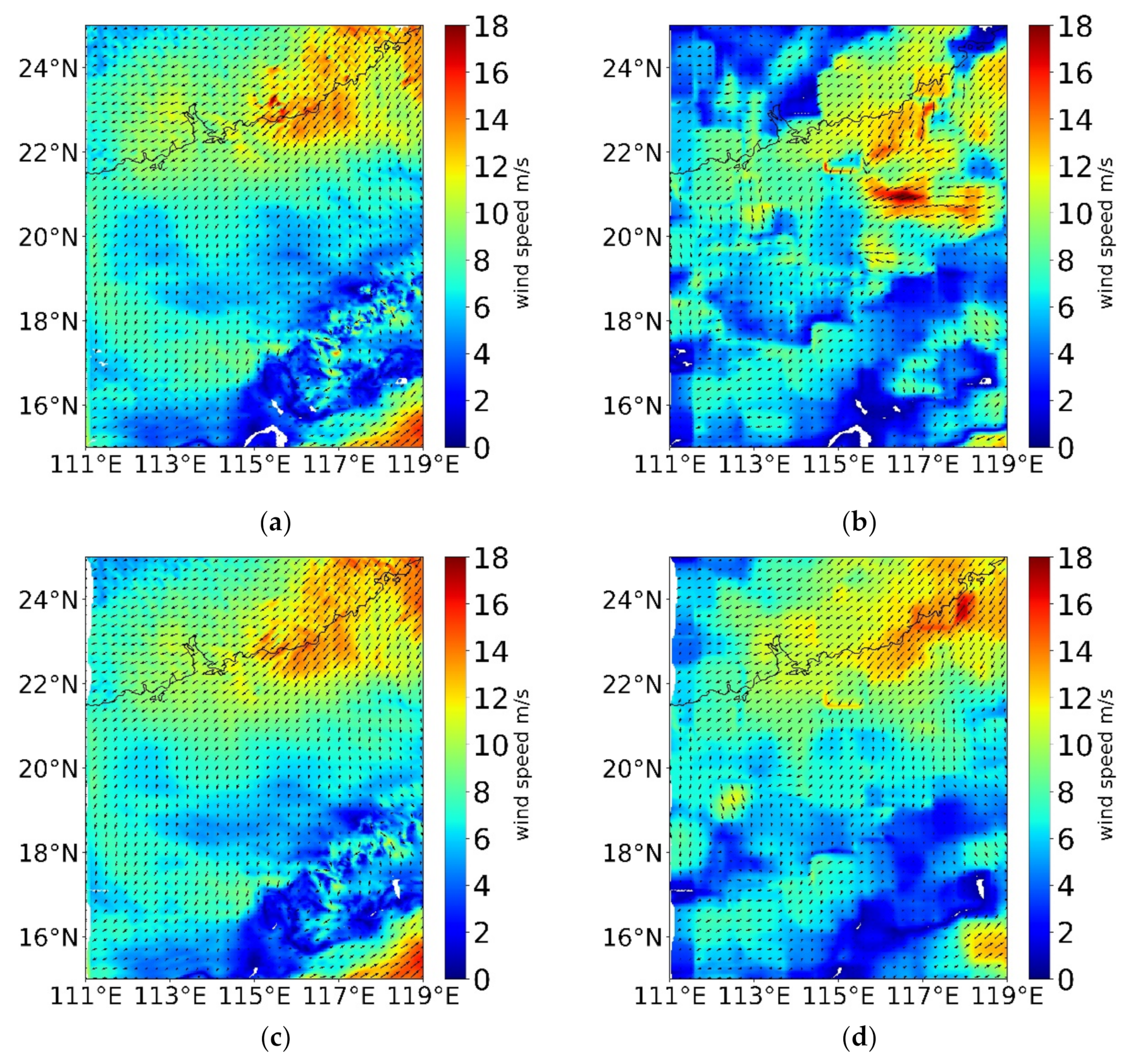
3.3. Analysis of AMVs Error and Algorithm Requirements under Different Weather Systems
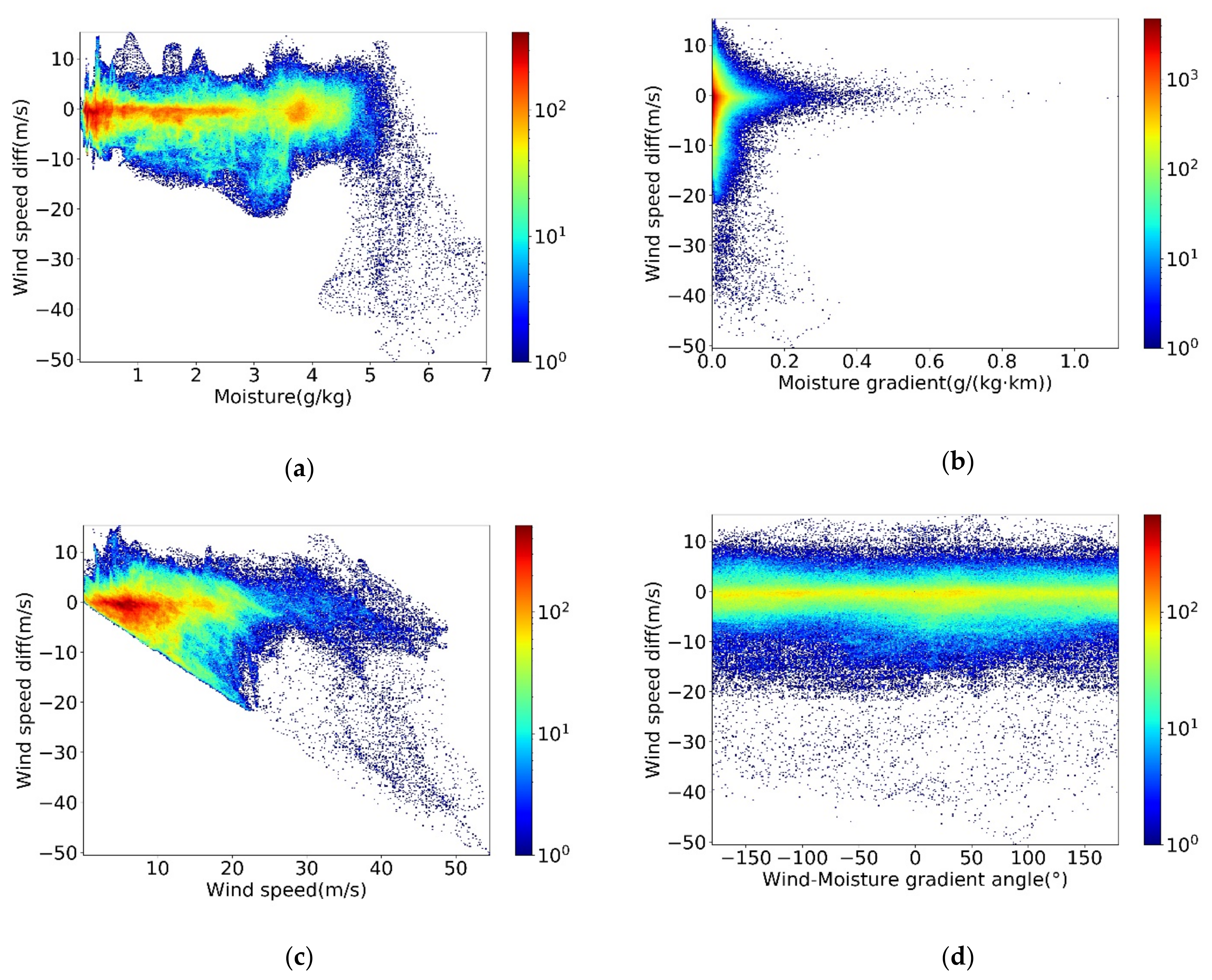
3.4. Relationship between AMVs Error and Water Vapor Content, Gradient, and Wind Speed
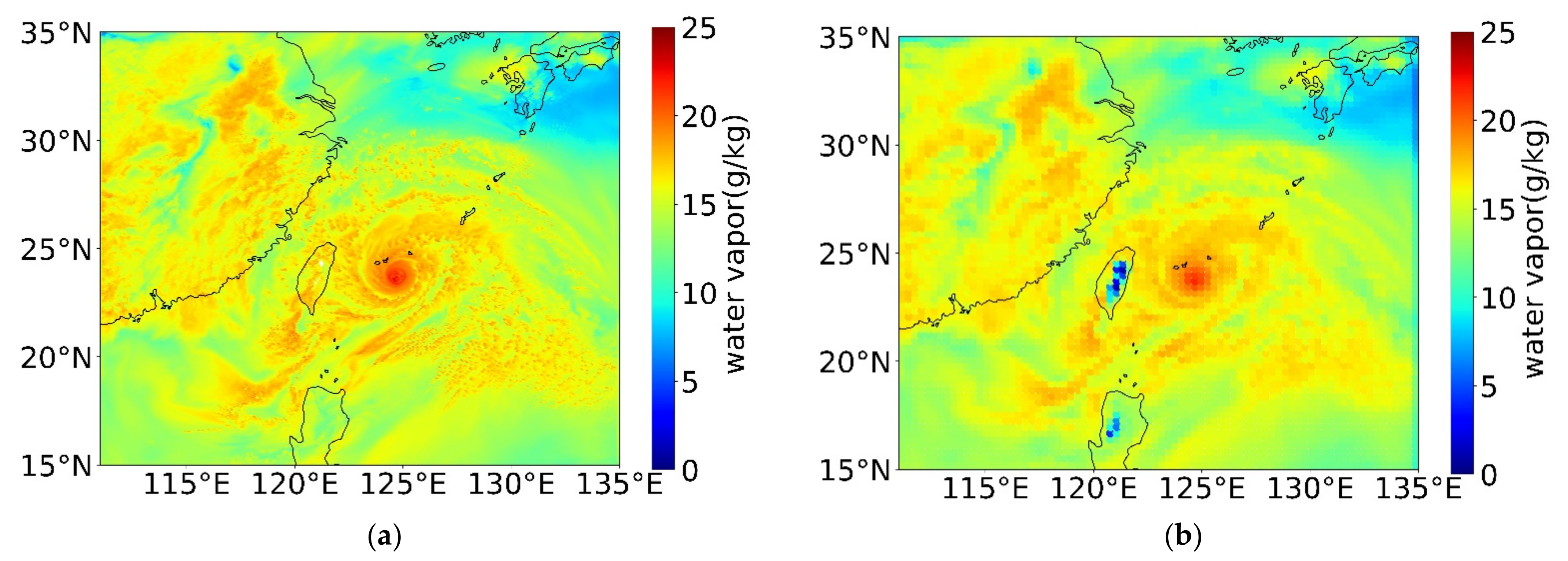
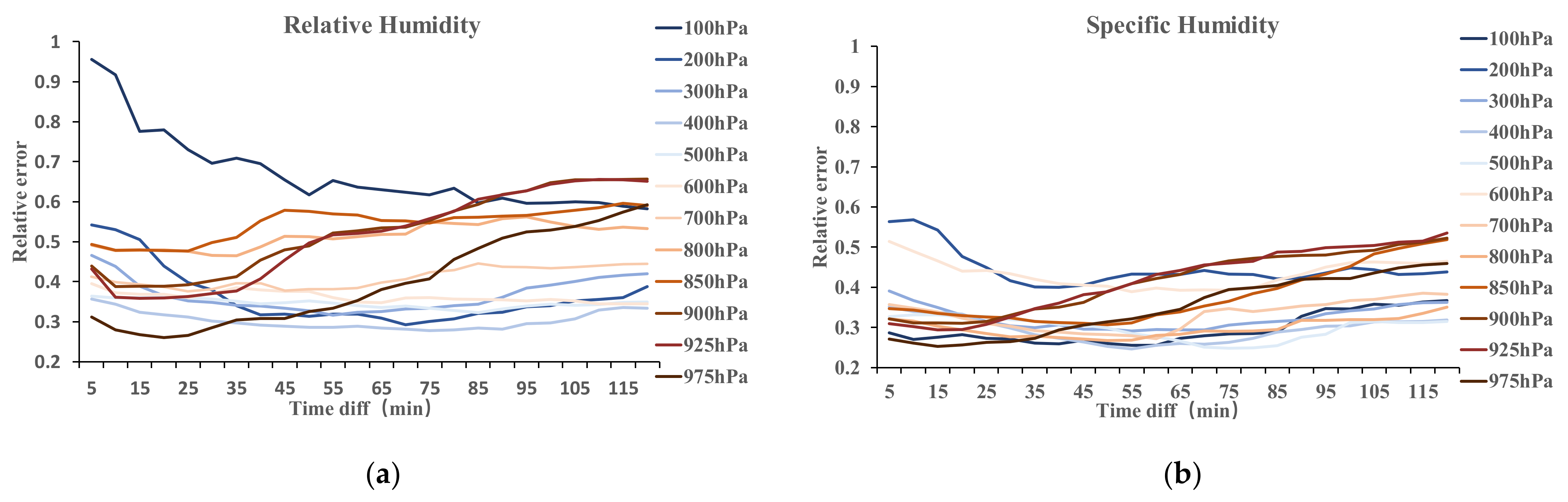
3.5. Error Comparison by Using Different Types of Water Vapor Data
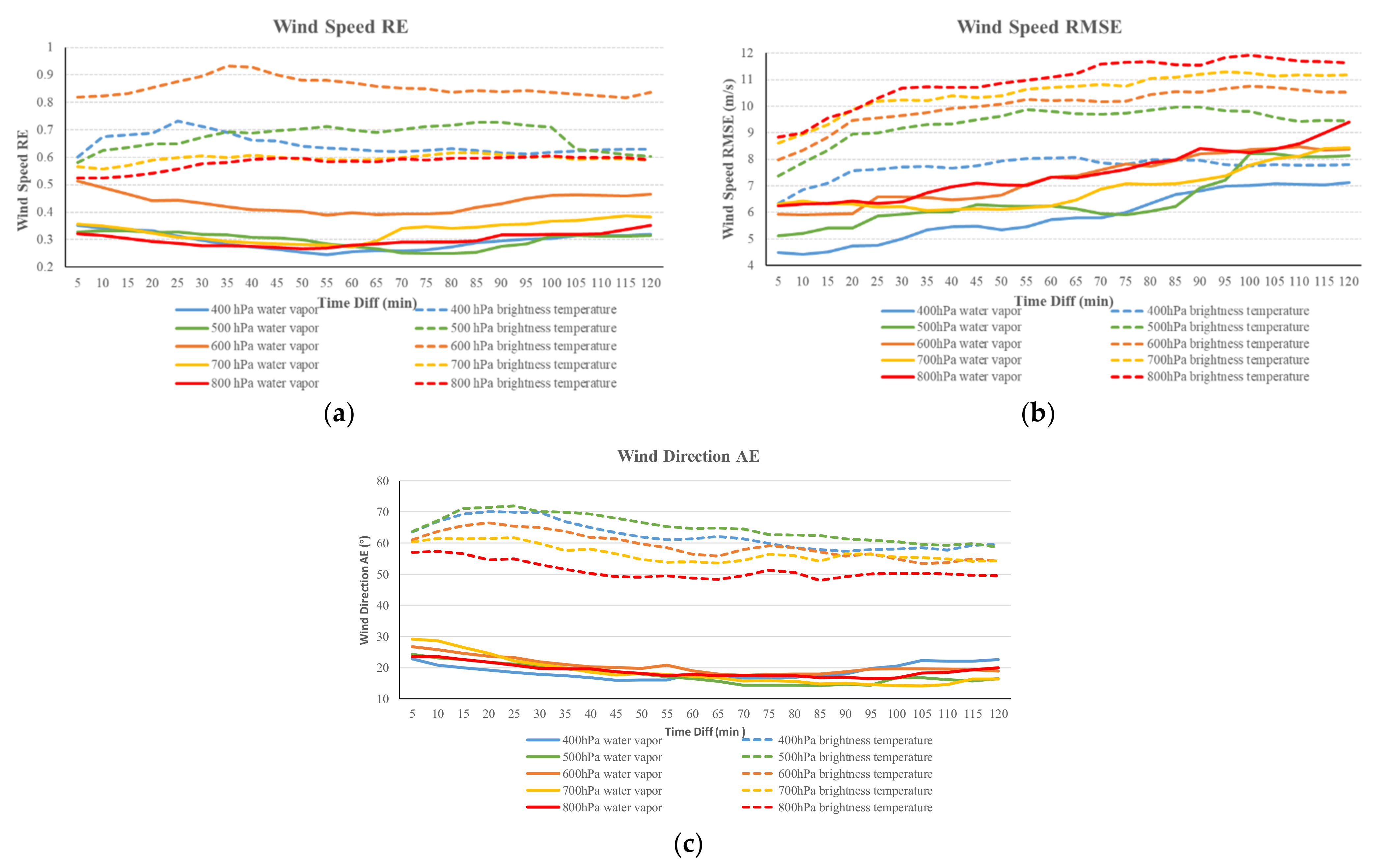
3.6. Error Comparison by Using Water Vapor and Brightness Temperature Data
4. Conclusions
- Specific humidity is suggested to be used as a water vapor tracer to obtain wind field, especially under convective areas. Compared with relative humidity, specific humidity is less affected by temperature changes and more accurately characterizes water vapor changes and movement. Tracking specific humidity features can achieve a more accurate wind field.
- The wind retrieval error decreases as the FOV size decreases, and the error sensitivity to the satellite revisiting time gradually increases. Therefore, if the sensor’s spatial resolution is extremely poor, shortening the revisiting time will not improve the wind field results.
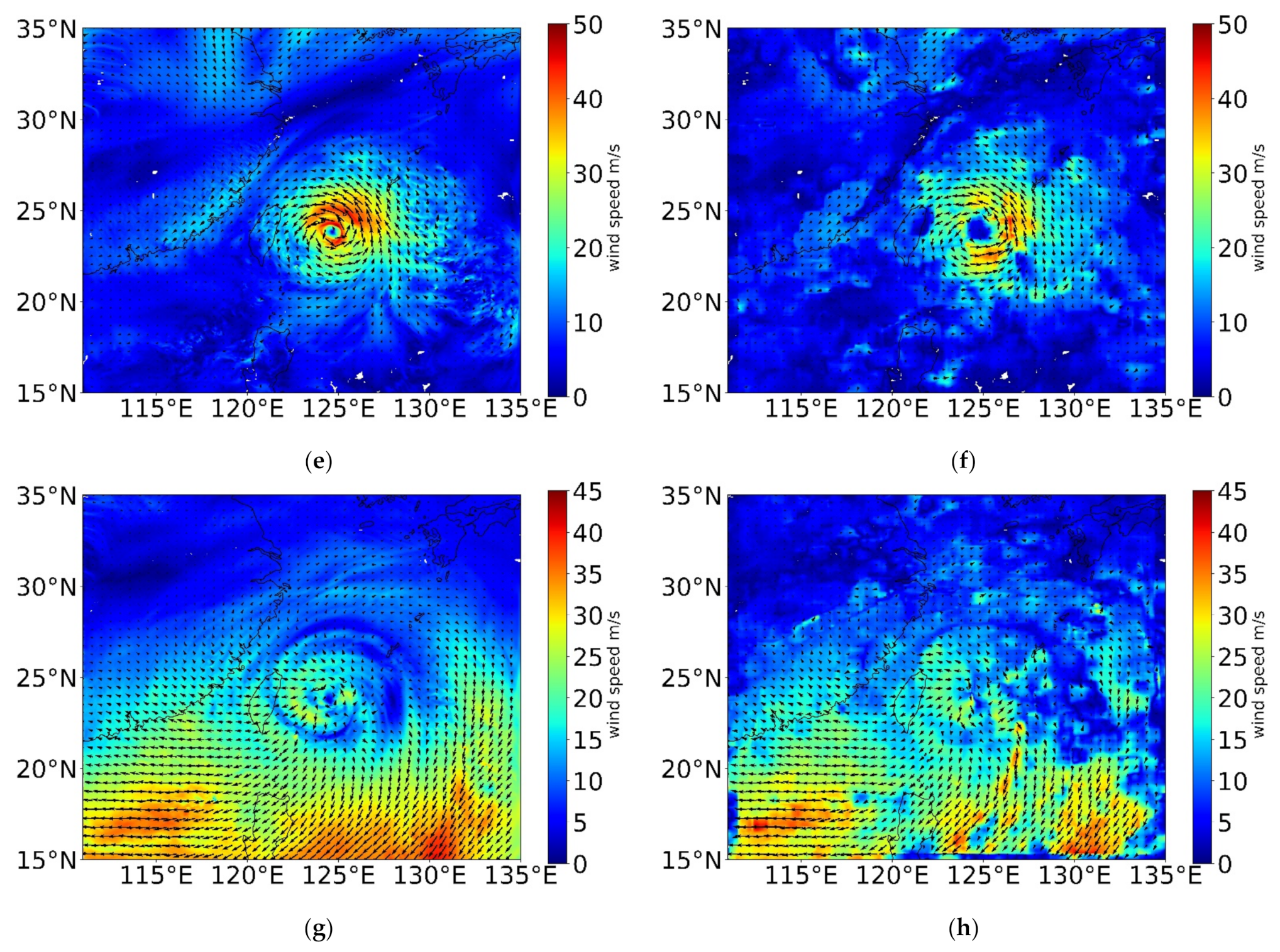
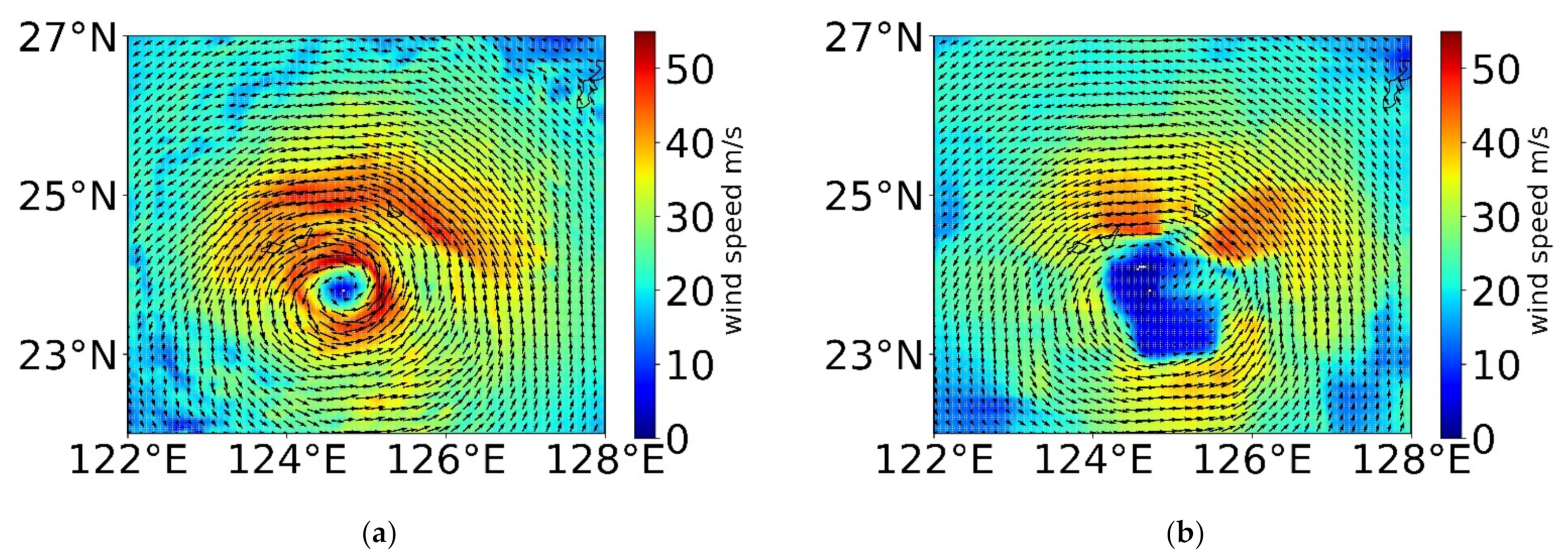
- For fast-evolving weather systems such as typhoons, the Farneback OF wind-tracking algorithm requires a very fine satellite revisiting time. In the central area of the typhoon, due to the fast-moving water vapor field with vertical convergence and divergence, the error is reduced with shorter temporal–spatial resolution.
- For the non-typhoon areas where the water vapor movement is relatively stable, the water vapor field with a time interval of at least 30 min is tracked for conducting a more accurate wind field. The difference between images is too subtle to be identified at a short revisiting time. The algorithm noise will seriously interfere with the signal, which leads to a large proportion of the signal and large retrieval errors.
- The Farneback OF wind-tracking algorithm can realize pixel-wise tracking. It can still obtain an accurate wind field when water vapor content is very low or the wind direction is parallel to the moisture gradient. Compared with the traditional wind-tracking method, our algorithm is more accurate for broader applications.
- The error of tracking simulated BT is larger than that of tracking WRF water vapor fields. Height assignment uncertainty, inclusion of temperature fields, and the systematic errors of BT simulated by radiative transfer model may increase the errors. After the geostationary microwave sounder data are available, the retrievals will consider accuracy, the uncertainty in water valor inhomogeneity, scan angle, and various weather events so that a high quality of water vapor field can be derived for wind tracking.
Author Contributions
Funding
Conflicts of Interest
References
- Van Kuik, G.; Peinke, J.; Nijssen, R.; Lekou, D.; Mann, J.; Sørensen, J.N.; Ferreira, C.; van Wingerden, J.-W.; Schlipf, D.; Gebraad, P. Long-term research challenges in wind energy—A research agenda by the European Academy of Wind Energy. Wind Energy Sci. 2016, 1, 1–39. [Google Scholar] [CrossRef] [Green Version]
- Abrams, D.I. The therapeutic effects of Cannabis and cannabinoids: An update from the National Academies of Sciences, Engineering and Medicine report. Eur. J. Intern. Med. 2018, 49, 7–11. [Google Scholar] [CrossRef]
- Santek, D.; Key, J.; Velden, C.; Bormann, N.; Thépaut, J.-N.; Menzel, W.P. Deriving Winds from Polar Orbiting Satellite Data. In Proceedings of the 6th International Winds Workshop, Madison, WI, USA, 7–10 May 2002; pp. 7–10. [Google Scholar]
- Meissner, T.; Ricciardulli, L.; Manaster, A. Tropical Cyclone Wind Speeds from WindSat, AMSR and SMAP: Algorithm Development and Testing. Remote Sens. 2021, 13, 1641. [Google Scholar] [CrossRef]
- Chronis, T.; Papadopoulos, V.; Nikolopoulos, E. QuickSCAT observations of extreme wind events over the Mediterranean and Black Seas during 2000–2008. Int. J. Climatol. 2011, 31, 2068–2077. [Google Scholar] [CrossRef]
- Gao, Y.; Sun, J.; Zhang, J.; Guan, C. Extreme Wind Speeds Retrieval Using Sentinel-1 IW Mode SAR Data. Remote Sens. 2021, 13, 1867. [Google Scholar] [CrossRef]
- Quartly, G.D.; Chen, G.; Nencioli, F.; Morrow, R.; Picot, N. An Overview of Requirements, Procedures and Current Advances in the Calibration/Validation of Radar Altimeters. Remote Sens. 2021, 13, 125. [Google Scholar] [CrossRef]
- Hautecoeur, O.; Borde, R. Derivation of wind vectors from AVHRR/MetOp at EUMETSAT. J. Atmos. Ocean. Technol. 2017, 34, 1645–1659. [Google Scholar] [CrossRef]
- Santek, D.; Nebuda, S.; Stettner, D. Demonstration and Evaluation of 3D Winds Generated by Tracking Features in Moisture and Ozone Fields Derived from AIRS Sounding Retrievals. Remote Sens. 2019, 11, 2597. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Maddy, E.S.; Zhang, B.; Zhu, T.; Boukabara, S.A. Impact assessment of Himawari-8 AHI data assimilation in NCEP GDAS/GFS with GSI. J. Atmos. Ocean. Technol. 2017, 34, 797–815. [Google Scholar] [CrossRef]
- Velden, C.S.; Olander, T.L.; Wanzong, S. The impact of multispectral GOES-8 wind information on Atlantic tropical cyclone track forecasts in 1995. Part I: Dataset methodology, description, and case analysis. Mon. Weather Rev. 1998, 126, 1202–1218. [Google Scholar] [CrossRef]
- Wang, Y.; He, J.; Chen, Y.; Min, J. The Potential Impact of Assimilating Synthetic Microwave Radiances Onboard a Future Geostationary Satellite on the Prediction of Typhoon Lekima Using the WRF Model. Remote Sens. 2021, 13, 886. [Google Scholar] [CrossRef]
- Fujita, T.T.; Watanabe, K.; Izawa, T. Formation and structure of equatorial anticyclones caused by large-scale cross-equatorial flows determined by ATS-I photographs. J. Appl. Meteorol. Climatol. 1969, 8, 649–667. [Google Scholar] [CrossRef] [Green Version]
- Endlich, R.; Wolf, D.; Hall, D.; Brain, A. Use of a pattern recognition technique for determining cloud motions from sequences of satellite photographs. J. Appl. Meteorol. Climatol. 1971, 10, 105–117. [Google Scholar] [CrossRef] [Green Version]
- Leese, J.A.; Novak, C.S.; Clark, B.B. An automated technique for obtaining cloud motion from geosynchronous satellite data using cross correlation. J. Appl. Meteorol. Climatol. 1971, 10, 118–132. [Google Scholar] [CrossRef]
- Menzel, W.P.; Merrill, R.T. The NESDIS/CIMSS wind algorithm: Current status and future improvements. In Proceedings of the Workshop on Wind Extraction from Operational Meteorological Satellite Data, Madison, WI, USA, 17–19 September 1991; pp. 10–77. [Google Scholar]
- Mueller, K.; Moroney, C.; Jovanovic, V.; Garay, M.; Muller, J.; Di Girolamo, L.; Davies, R. MISR Level 2 Cloud Product Algorithm Theoretical Basis; JPL Tech. Doc. JPL D-73327; Jet Propulsion Laboratory: La Cañada Flintridge, CA, USA, 2013.
- Xu, J.; Holmlund, K.; Zhang, Q.; Schmetz, J. Comparison of two schemes for derivation of atmospheric motion vectors. J. Geophys. Res. Atmos. 2002, 107, ACL 4-1–ACL 4-15. [Google Scholar] [CrossRef]
- Mueller, K.J.; Wu, D.L.; Horváth, Á.; Jovanovic, V.M.; Muller, J.-P.; Di Girolamo, L.; Garay, M.J.; Diner, D.J.; Moroney, C.M.; Wanzong, S. Assessment of MISR cloud motion vectors (CMVs) relative to GOES and MODIS atmospheric motion vectors (AMVs). J. Appl. Meteorol. Climatol. 2017, 56, 555–572. [Google Scholar] [CrossRef] [Green Version]
- Salonen, K.; Cotton, J.; Bormann, N.; Forsythe, M. Characterising AMV height assignment error by comparing best-fit pressure statistics from the Met Office and ECMWF system. In Proceedings of the 11th International Wind Workshop, Auckland, New Zealand, 20–24 February 2012. [Google Scholar]
- Santek, D.; Nebuda, S.; Stettner, D. Feature-tracked winds from moisture fields derived from AIRS sounding retrievals. In Proceedings of the 12th International Winds Workshop, Copenhagen, Denmark, 15–20 June 2014. [Google Scholar]
- Hu, H.; Weng, F.; Han, Y.; Duan, Y. Remote sensing of tropical cyclone thermal structure from satellite microwave sounding instruments: Impacts of background profiles on retrievals. J. Meteorol. Res. 2019, 33, 89–103. [Google Scholar] [CrossRef]
- Hu, H.; Han, Y. Comparing the Thermal Structures of Tropical Cyclones Derived from Suomi NPP ATMS and FY-3D Microwave Sounders. IEEE Trans. Geosci. Remote Sens. 2020. [Google Scholar] [CrossRef]
- Lin, L.; Weng, F. Estimation of hurricane maximum wind speed using temperature anomaly derived from Advanced Technology Microwave Sounder. IEEE Geosci. Remote Sens. Lett. 2018, 15, 639–643. [Google Scholar] [CrossRef]
- Ma, Y.; Zou, X.; Weng, F. Potential applications of small satellite microwave observations for monitoring and predicting global fast-evolving weathers. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2441–2451. [Google Scholar] [CrossRef]
- Wang, S.; Shi, S.; Ni, B. Joint Use of Spaceborne Microwave Sensor Data and CYGNSS Data to Observe Tropical Cyclones. Remote Sens. 2020, 12, 3124. [Google Scholar] [CrossRef]
- Lambrigtsen, B.; Van Dang, H.; Turk, F.J.; Hristova-Veleva, S.M.; Su, H.; Wen, Y. All-weather tropospheric 3-D wind from microwave sounders. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1949–1956. [Google Scholar] [CrossRef]
- Posselt, D.J.; Wu, L.; Mueller, K.; Huang, L.; Irion, F.W.; Brown, S.; Su, H.; Santek, D.; Velden, C.S. Quantitative Assessment of State-Dependent Atmospheric Motion Vector Uncertainties. J. Appl. Meteorol. Climatol. 2019, 58, 2479–2495. [Google Scholar] [CrossRef]
- Sun, F.; Min, M.; Qin, D.; Wang, F.; Hu, J. Refined typhoon geometric center derived from a high spatiotemporal resolution geostationary satellite imaging system. IEEE Geosci. Remote Sens. Lett. 2018, 16, 499–503. [Google Scholar] [CrossRef]
- Farnebäck, G. Two-frame motion estimation based on polynomial expansion. In Proceedings of the Scandinavian Conference on Image Analysis, Halmstad, Sweden, 29 June–2 July 2003; pp. 363–370. [Google Scholar]
- Farnebäck, G. Polynomial Expansion for Orientation and Motion Estimation; Linköping University Electronic Press: Linköping, Sweden, 2002. [Google Scholar]
- Brox, T.; Bruhn, A.; Papenberg, N.; Weickert, J. High accuracy optical flow estimation based on a theory for warping. In Proceedings of the European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; pp. 25–36. [Google Scholar]
- Burt, P.J.; Adelson, E.H. The Laplacian pyramid as a compact image code. In Readings in Computer Vision; Elsevier: Amsterdam, The Netherlands, 1987; pp. 671–679. [Google Scholar]
- Baker, N.L. Quality control for the navy operational atmospheric database. Weather Forecast. 1992, 7, 250–261. [Google Scholar] [CrossRef] [Green Version]
- Saucier, W.J. Principles of Meteorological Analysis; University of Chicago Press: Chicago, IL, USA, 1955. [Google Scholar]
- Brogniez, H.; English, S.; Mahfouf, J.-F.; Behrendt, A.; Berg, W.; Boukabara, S.; Buehler, S.A.; Chambon, P.; Gambacorta, A.; Geer, A. A review of sources of systematic errors and uncertainties in observations and simulations at 183 GHz. Atmos. Meas. Tech. 2016, 9, 2207–2221. [Google Scholar] [CrossRef] [Green Version]
- Calbet, X.; Peinado-Galan, N.; DeSouza-Machado, S.; Kursinski, E.R.; Oria, P.; Ward, D.; Otarola, A.; Rípodas, P.; Kivi, R. Can turbulence within the field of view cause significant biases in radiative transfer modeling at the 183 GHz band? Atmos. Meas. Tech. 2018, 11, 6409–6417. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Scope | Experiment Design | |
|---|---|---|
| Satellite revisiting time | 5–120 min | Sampled every 5 min |
| FOV size | 3–30 km | 3 km, 6 km, 12 km, 18 km, 24 km, 30 km |
| Moisture height | 975–100 hPa | 975 hPa, 925 hPa, 900 hPa, 850 hPa, 800 hPa, 700 hPa, 600 hPa, 500 hPa, 400 hPa, 300 hPa, 200 hPa, 100 hPa |
| Channel Number | Center Frequency (GHz) | Weighting Function Peak | Approximate WRF Layers |
|---|---|---|---|
| 11 | 183.31 ± 1 | 441.93 hPa | 400 hPa |
| 12 | 183.31 ± 1.8 | 515.77 hPa | 500 hPa |
| 13 | 183.31 ± 3 | 596.35 hPa | 600 hPa |
| 14 | 183.31 ± 4.5 | 683.71 hPa | 700 hPa |
| 15 | 183.31 ± 7 | 802.41 hPa | 800 hPa |
| Quality Control Code | Definition |
|---|---|
| 0 | Good quality |
| 1 | Exceeding the research area |
| 2 | Water vapor loss or abnormal |
| 3 | U component accelerated velocity over 10 m/s2 |
| 4 | V component accelerated velocity over 10 m/s2 |
| 5 | Both satisfied with 3 and 4 |
| 6 | Wind speed lower than 0.5 m/s |
| Whole Simulated Area | Typhoon Area | |
|---|---|---|
| Wind speed RE | 35.17% | 15.31% |
| Wind direction AE | 22.9° | 7.67° |
| Satellite Revisiting Time | 5 min | 50 min |
|---|---|---|
| Wind speed RE | 34.77% | 19.32% |
| Wind direction AE | 27.58° | 14.97° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Hu, H.; Weng, F. The Potential of Satellite Sounding Observations for Deriving Atmospheric Wind in All-Weather Conditions. Remote Sens. 2021, 13, 2947. https://doi.org/10.3390/rs13152947
Zhang Y, Hu H, Weng F. The Potential of Satellite Sounding Observations for Deriving Atmospheric Wind in All-Weather Conditions. Remote Sensing. 2021; 13(15):2947. https://doi.org/10.3390/rs13152947
Chicago/Turabian StyleZhang, Yijia, Hao Hu, and Fuzhong Weng. 2021. "The Potential of Satellite Sounding Observations for Deriving Atmospheric Wind in All-Weather Conditions" Remote Sensing 13, no. 15: 2947. https://doi.org/10.3390/rs13152947
APA StyleZhang, Y., Hu, H., & Weng, F. (2021). The Potential of Satellite Sounding Observations for Deriving Atmospheric Wind in All-Weather Conditions. Remote Sensing, 13(15), 2947. https://doi.org/10.3390/rs13152947