
Underground Pipeline Identification into a Non-Destructive Case Study Based on Ground-Penetrating Radar Imaging


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
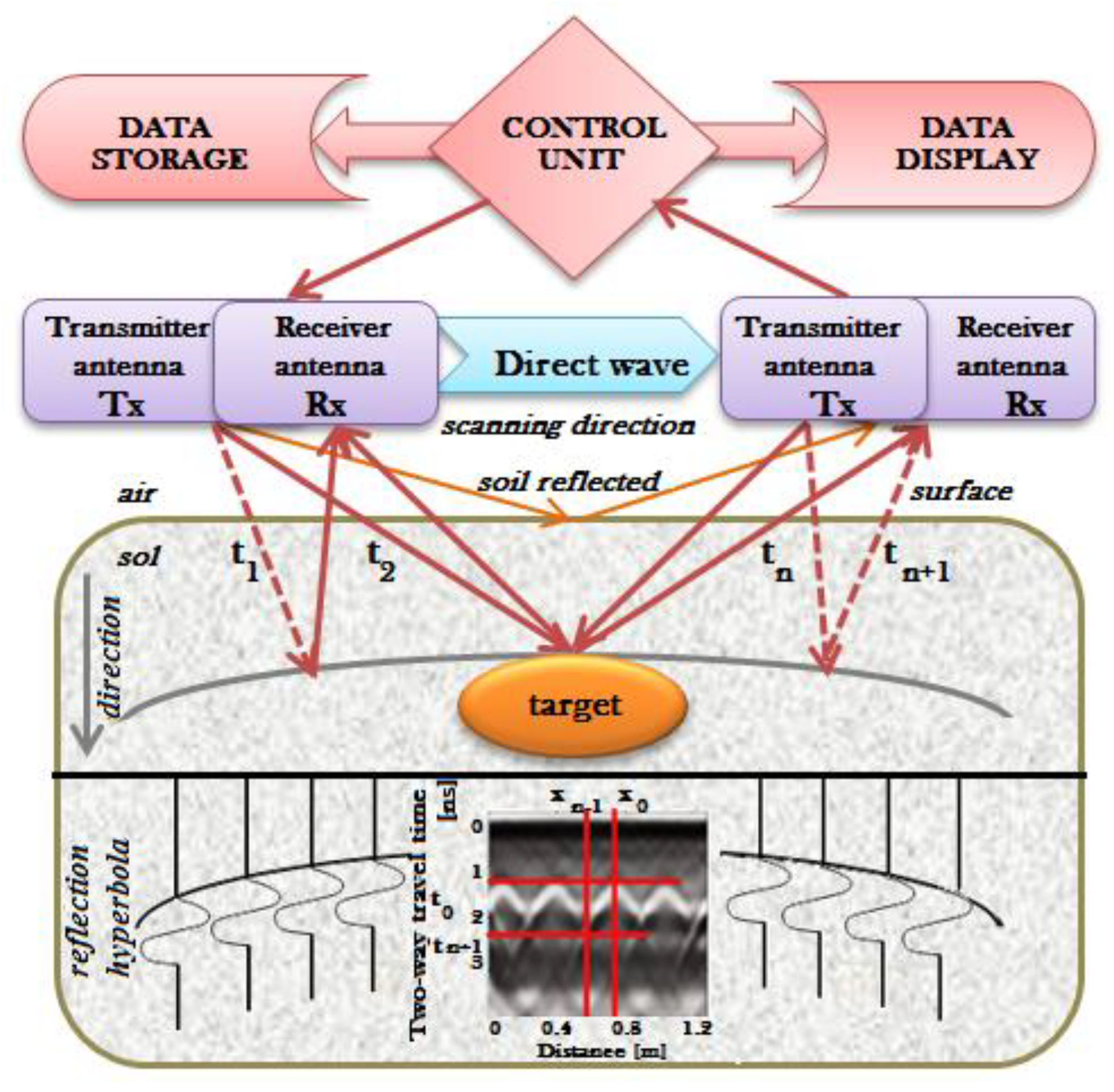
2.1. Generic GPR with Bowtie Antenna and Propagation Waves
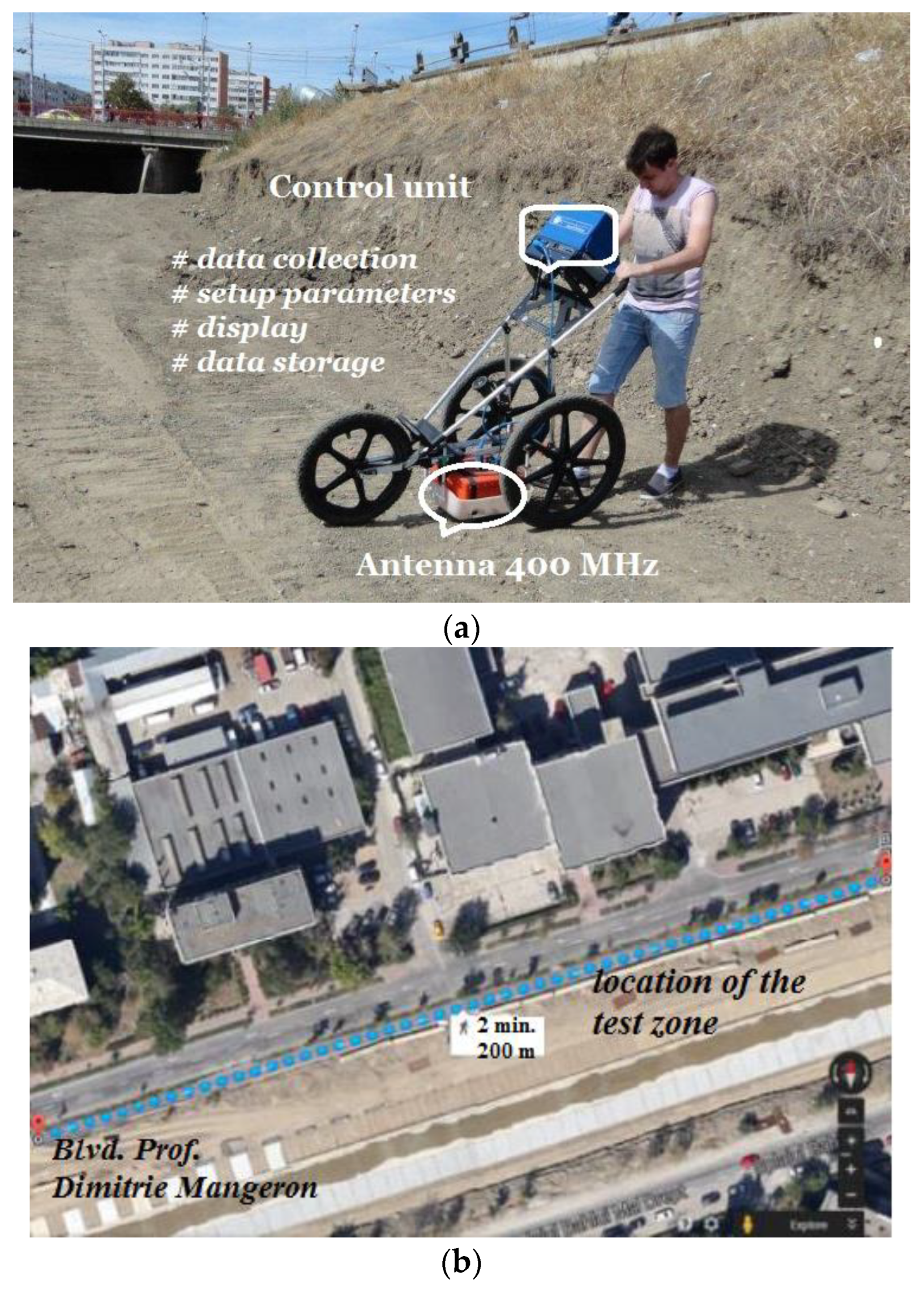
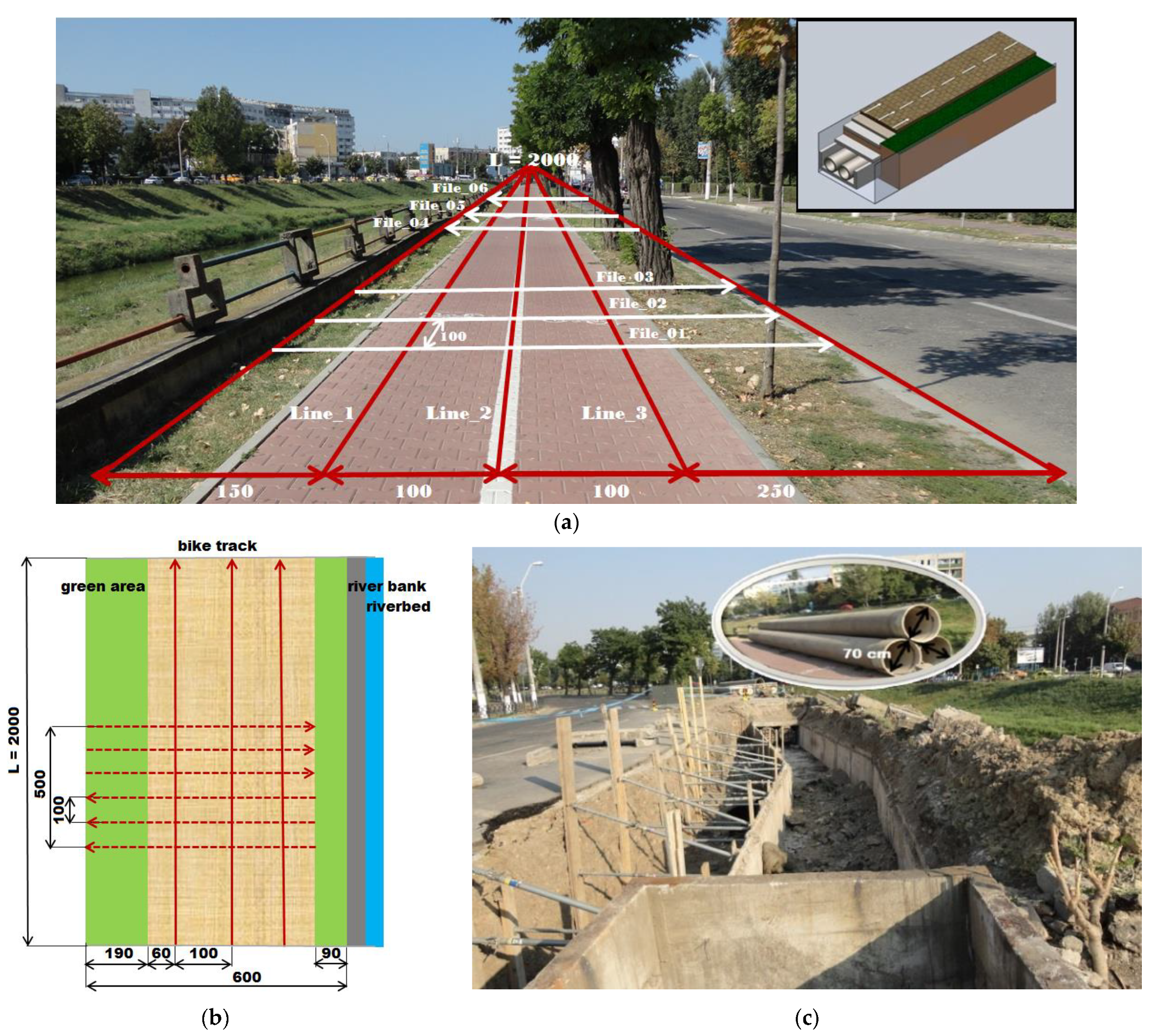
2.2. Geophysical Surveys in Pavement Assessment and Drainage Water Pipes Detection
2.3. Signal Processing: A-Scan and B-Scan
3. Results
3.1. Application of GPR Data Raw and FDTD Simulations in the Detection and Replace of Water Pipes
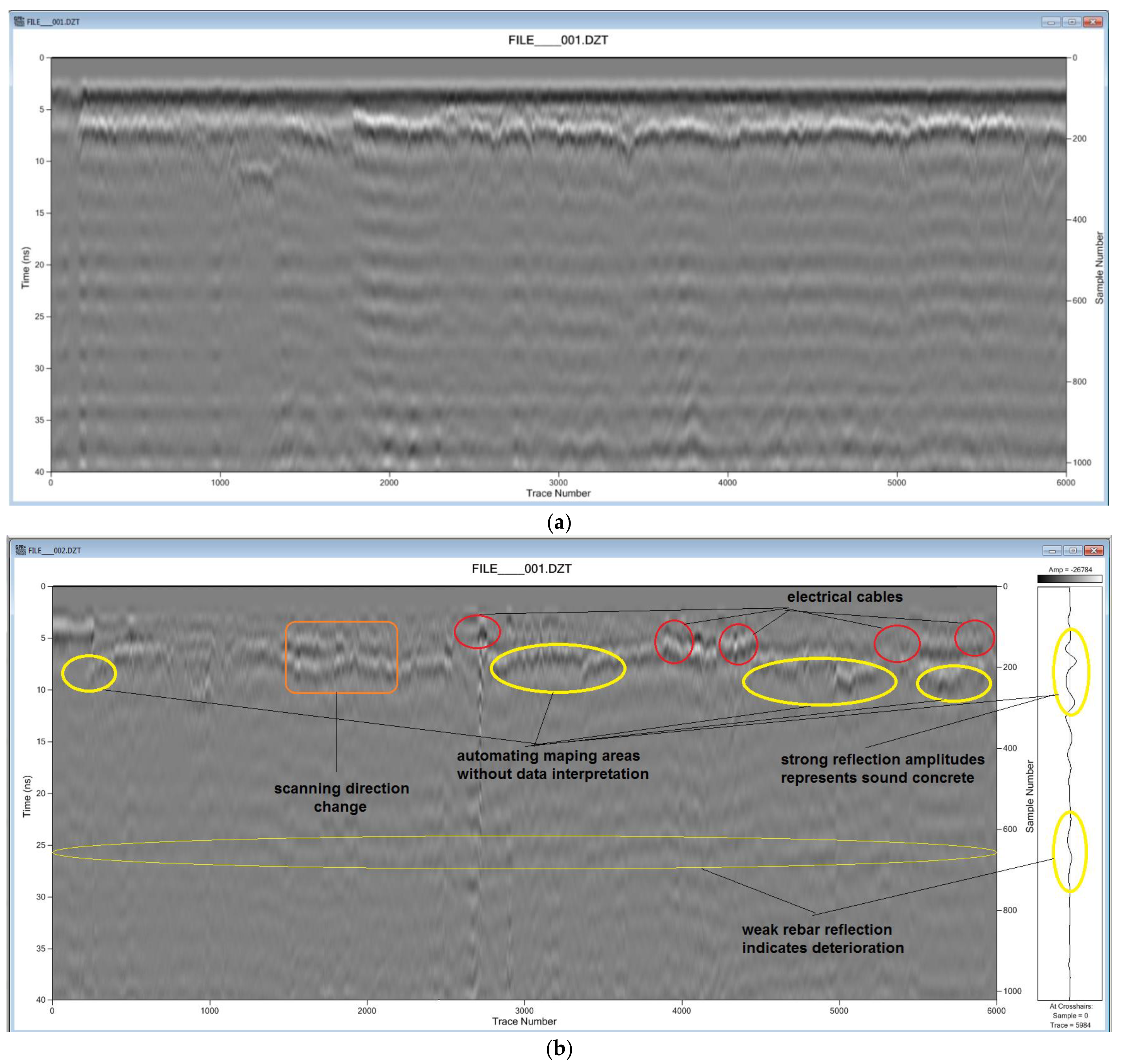
3.2. A-Scan and B-Scan Results
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ghavamian, A.; Mustapha, F.; Baharudin, B.T.; Yidris, N. Detection, localisation and assessment of defects in pipes using guided wave techniques: A review. Sensors 2018, 18, 4470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; IEEE Press: Stevenage Herts, UK, 2004. [Google Scholar]
- Pedret Rodés, J.; Martínez Reguero, A.; Pérez-Gracia, V. GPR Spectra for Monitoring Asphalt Pavements. Remote Sens. 2020, 12, 1749. [Google Scholar] [CrossRef]
- Diamanti, N.; Annan, A.P.; Redman, J.D. Concrete bridge deck deterioration assessment using ground penetrating radar (GPR). J. Environ. Eng. Geophys. 2017, 22, 121–132. [Google Scholar] [CrossRef]
- Dong, Z.; Ye, S.; Gao, Y.; Fang, G.; Zhang, X.; Xue, Z.; Zhang, T. Rapid detection methods for asphalt pavement thicknesses and defects by a vehicle-mounted ground penetrating radar (GPR) system. Sensors 2016, 16, 2067. [Google Scholar] [CrossRef] [Green Version]
- Daniels, D.J. A review of GPR for landmine detection. Sens. Imaging 2006, 7, 90–123. [Google Scholar] [CrossRef]
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2009; pp. 3–40. [Google Scholar]
- Solla, M.; Lorenzo, H.; Rial, F.I.; Novo, A. GPR evaluation of the Roman masonry arch bridge of Lugo (Spain). NDT E Int. 2011, 44, 8–12. [Google Scholar] [CrossRef]
- Massarelli, C.; Campanale, C.; Uricchio, V.F. Ground Penetrating Radar as a Functional Tool to Outline the Presence of Buried Waste: A Case Study in South Italy. Sustainability 2021, 13, 3805. [Google Scholar] [CrossRef]
- Demirci, S.; Yigit, E.; Eskidemir, I.H.; Ozdemir, C. Ground penetrating radar imaging of water leaks from buried pipes based on back-projection method. NDT E Int. 2012, 47, 35–42. [Google Scholar] [CrossRef]
- Grimberg, R.; Savin, A.; Iftimie, N.; Leitoiu, S.; Andreescu, A. GPR for UXO recognition. Stud. Appl. Electromagn. Mech. 2011, 35, 381–388. [Google Scholar]
- Xavier, N.N.; Mercedes, S.; Paula, G.P.; Lorenzo, H. GPR Signal Characterization for Automated Landmine and UXO Detection Based on Machine Learning Techniques. Remote Sens. 2014, 6, 9729–9748. [Google Scholar]
- Gonzalez-Huici, M.A.; Giovanneschi, F. A combined strategy for landmine detection and identification using synthetic GPR responses. J. Appl. Geophys. 2013, 99, 154–165. [Google Scholar] [CrossRef]
- Smith, G.S.; Petersson, L.E.R. On the Use of Evanescent Electromagnetic Waves in Detection and Identification of Objects Buried in Lossy Soil. IEEE Trans. Antenna Propag. 2000, 48, 1295–1300. [Google Scholar] [CrossRef]
- Ozdemir, C.; Demirci, S.; Yigit, E. Practical algorithms to focus B-scan GPR images: Theory and application to real data. Prog. Electromagn. Res. B 2008, 6, 109–122. [Google Scholar] [CrossRef] [Green Version]
- Lestari, A.A.; Yarovoy, A.G.; Ligthart, L.P. Analysis and Design of Improved Antennas for GPR. Subsurf. Sens. Technol. Appl. 2002, 3, 295–326. [Google Scholar] [CrossRef]
- Soil Taxonomy—A Basic System of Soil Classification for Making and Interpreting Soil Surveys. Available online: http://www.nrcs.usda.gov/Internet/FSE_DOCUMENTS/nrcs142p2_051232.pdf (accessed on 15 July 2021).
- Hipp, J.E. Soil Electromagnetic parameters as functions of frequency. Soil density and soil moisture. Proc. IEEE 1974, 62, 98–103. [Google Scholar] [CrossRef]
- Alonso, R.; Pozo, J.; Buisán, S.T.; Álvarez, J.A. Analysis of the Snow Water Equivalent at the AEMet-Formigal Field Laboratory (Spanish Pyrenees) During the 2019/2020 Winter Season Using a Stepped-Frequency Continuous Wave Radar (SFCW). Remote Sens. 2021, 13, 616. [Google Scholar] [CrossRef]
- Jin, Y.; Duan, Y. Wavelet scattering network-based machine learning for ground penetrating radar imaging: Application in pipeline identification. Remote Sens. 2020, 12, 3655. [Google Scholar] [CrossRef]
- Iftimie, N.; Dobrescu, G.S.; Savin, A. Imaging Subsurface Water Pipe using GPR and Evanescent Waves: Experimental and Simulations Data. Appl. Mech. Mater. 2015, 771, 359–364. [Google Scholar] [CrossRef]
- Iftimie, N.; Savin, A.; Danila, N.A.; Dobrescu, G.S. Radar pulses to image the subsurface using Ground Penetrating Radar (GPR). IOP Conf. Ser. Mater. Sci. Eng. 2019, 564, 012130. [Google Scholar] [CrossRef]
- Oliveira, R.J.; Caldeira, B.; Teixidó, T.; Borges, J.F. GPR Clutter Reflection Noise-Filtering through Singular Value Decomposition in the Bidimensional Spectral Domain. Remote Sens. 2021, 13, 2005. [Google Scholar] [CrossRef]
- Rodríguez-Santalla, I.; Gomez-Ortiz, D.; Martín-Crespo, T.; Sánchez-García, M.J.; Montoya-Montes, I.; Martín-Velázquez, S.; Barrio, F.; Serra, J.; Ramírez-Cuesta, J.M.; Gracia, F.J. Study and Evolution of the Dune Field of La Banya Spit in Ebro Delta (Spain) Using LiDAR Data and GPR. Remote Sens. 2021, 13, 802. [Google Scholar] [CrossRef]
- Bianchini Ciampoli, L.; Gagliardi, V.; Ferrante, C.; Calvi, A.; D’Amico, F.; Tosti, F. Displacement monitoring in airport runways by persistent scatterers SAR interferometry. Remote Sens. 2020, 12, 3564. [Google Scholar] [CrossRef]
- Martínez, J.; Rey, J.; Gutiérrez, L.M.; Novo, A.; Ortiz, A.J.; Alejo, M.; Galdón, J.M. Electrical resistivity imaging (ERI) and ground-penetrating radar (GPR) survey at the Giribaile site (upper Guadalquivir valley; southern Spain). J. Appl. Geophys. 2015, 123, 218–226. [Google Scholar] [CrossRef]
- Leucci, G.; De Giorgi, L.; Gizzi, F.T.; Persico, R. Integrated geo-scientific surveys in the historical centre of Mesagne (Brindisi, Southern Italy). Nat. Hazards 2017, 86, 363–383. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Ciampoli, L.B.; D’Amico, F. An overview of ground-penetrating radar signal processing techniques for road inspections. Signal Process. 2017, 132, 201–209. [Google Scholar] [CrossRef]
- Leucci, G. Advances in Geophysical Methods Applied to Forensic Investigations: New Developments in Acquisition and Data Analysis Methodologies; Springer: Berlin/Heidelberg, Germany, 2020; p. 200. ISBN 978-3-030-46241-3. [Google Scholar]
- Wang, M.; Wen, J.; Li, W. Qualitative Research: The impact of Roat Orientation on Coarse Roots Detection Using Ground-Penetrating Radar (GPR). BioResources 2020, 15, 2237–2257. [Google Scholar] [CrossRef]
- Özdemir, C.; Demirci, F.; Yigit, E.; Yilmaz, B. A Review on Migration Methods in B-Scan Ground Penetrating Radar Im-aging. Math. Probl. Eng. 2014, 2014, 16. [Google Scholar] [CrossRef] [Green Version]
- Giannopoulos, A. GprMax2D/3D. User’s Guide 2003. Available online: http://www.gprmax.com/code/UserGuideV2.pdf (accessed on 15 January 2021).
- Giannakis, I.; Giannopoulos, A.; Warren, C.A. Realistic FDTD Numerical Modeling Framework of Ground Penetrating Radar for Landmine Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 37–51. [Google Scholar] [CrossRef]
- Lowe, M.J. Matrix techniques for modeling ultrasonic waves in multilayered media. IEEE Trans. Ultrason. Ferroe-Lectr. Freq. Control 1995, 42, 525–542. [Google Scholar] [CrossRef]
- Bladel, J.V. Electromagnetic Fields; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Grimberg, R.; Udpa, L.; Savin, A.; Steigmann, R.; Palihovici, V.; Udpa, S.S. 2D Eddy current sensor array. NDT E Int. 2006, 39, 264–271. [Google Scholar] [CrossRef]
- Chew, W.C. Waves and Fields in Inhomogeneous Media; Van Nostrand Reinhold: New York, NY, USA, 1990. [Google Scholar]
- Grimberg, R.; Udpa, L.; Savin, A.; Steigmann, R.; Bruma, A.; Udpa, S.S. Electromagnetic evaluation of soil condition. Stud. Appl. Electromagn. Mech. 2009, 32, 363–370. [Google Scholar]
- Grimberg, R.; Udpa, L.; Udpa, S.S. Electromagnetic transducer for the determination of soil condition. Int. J. Appl. Electromagn. Mech. 2008, 28, 201–210. [Google Scholar] [CrossRef]
- Geophysical Survey Systems, Inc. (GSSI) Site. Available online: http://www.geophysical.com/ (accessed on 15 January 2021).
- Gunatilaka, A.H.; Baertlein, B.A.; Harvey, J.F.; Broach, J.T.; Dugan, R.E. Subspace decomposition technique to improve GPR imaging of antipersonnel mines. In Detection and Remediation Technologies for Mines and Minelike Targets V; International Society for Optics and Photonics: Orlando, FL, USA, 2000. [Google Scholar]
- Pedret Rodes, J.; Pérez-Gracia, V.; Martínez-Reguero, A. Evaluation of the GPR frequency spectra in asphalt pavement as-sessment. Constr. Build. Mater. 2015, 96, 181–188. [Google Scholar] [CrossRef] [Green Version]
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- GPR-Repository. Available online: https://sites.google.com/site/gprbekic/gprutils/ (accessed on 15 January 2021).
- De Chiara, F.; Fontul, S.; Fortunato, E. GPR Laboratory Tests for Railways Materials Dielectric Properties Assessment. Remote Sens. 2014, 6, 9712–9728. [Google Scholar] [CrossRef] [Green Version]
- Andreas, T. MATGPR—Manual and Technical Reference. 2016. Available online: http://users.uoa.gr/~atzanis/matgpr/matgpr.html (accessed on 15 January 2021).
- Giannopoulos, A. Modelling ground penetrating radar by GprMax. Constr. Build. Mater. 2005, 19, 755–762. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A. Time-synchronized convolutional perfectly matched layer for improved absorbing per-formance in FDTD. IEEE Antennas Wirel. Propag. Lett. 2014, 14, 690–693. [Google Scholar] [CrossRef] [Green Version]
- Giannakis, I.; Giannopoulos, A.; Warren, C. Realistic FDTD GPR antenna models optimized using a novel linear/nonlinear Full-Waveform Inversion. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1768–1778. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A. Creating finite-difference time-domain models of commercial ground-penetrating radar antennas using Taguchi’s optimization method. Geophysics 2011, 76, G37–G47. [Google Scholar] [CrossRef]
- Cheng, W.; Fang, H.; Xu, G.; Chen, M. Using SCADA to Detect and Locate Bursts in a Long-Distance Water Pipeline. Water 2018, 10, 1727. [Google Scholar] [CrossRef] [Green Version]
- Cassidy, N.J.; Millington, T.M. The application of finite-difference time-domain modelling for the assessment of GPR in magnetically lossy materials. J. Appl. Geophys. 2009, 67, 296–308. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. GprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef] [Green Version]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iftimie, N.; Savin, A.; Steigmann, R.; Dobrescu, G.S. Underground Pipeline Identification into a Non-Destructive Case Study Based on Ground-Penetrating Radar Imaging. Remote Sens. 2021, 13, 3494. https://doi.org/10.3390/rs13173494
Iftimie N, Savin A, Steigmann R, Dobrescu GS. Underground Pipeline Identification into a Non-Destructive Case Study Based on Ground-Penetrating Radar Imaging. Remote Sensing. 2021; 13(17):3494. https://doi.org/10.3390/rs13173494
Chicago/Turabian StyleIftimie, Nicoleta, Adriana Savin, Rozina Steigmann, and Gabriel Silviu Dobrescu. 2021. "Underground Pipeline Identification into a Non-Destructive Case Study Based on Ground-Penetrating Radar Imaging" Remote Sensing 13, no. 17: 3494. https://doi.org/10.3390/rs13173494
APA StyleIftimie, N., Savin, A., Steigmann, R., & Dobrescu, G. S. (2021). Underground Pipeline Identification into a Non-Destructive Case Study Based on Ground-Penetrating Radar Imaging. Remote Sensing, 13(17), 3494. https://doi.org/10.3390/rs13173494