
Evaluation of a Statistical Approach for Extracting Shallow Water Bathymetry Signals from ICESat-2 ATL03 Photon Data

 , , and
, , and
Abstract
:
1. Introduction
2. Materials and Methods
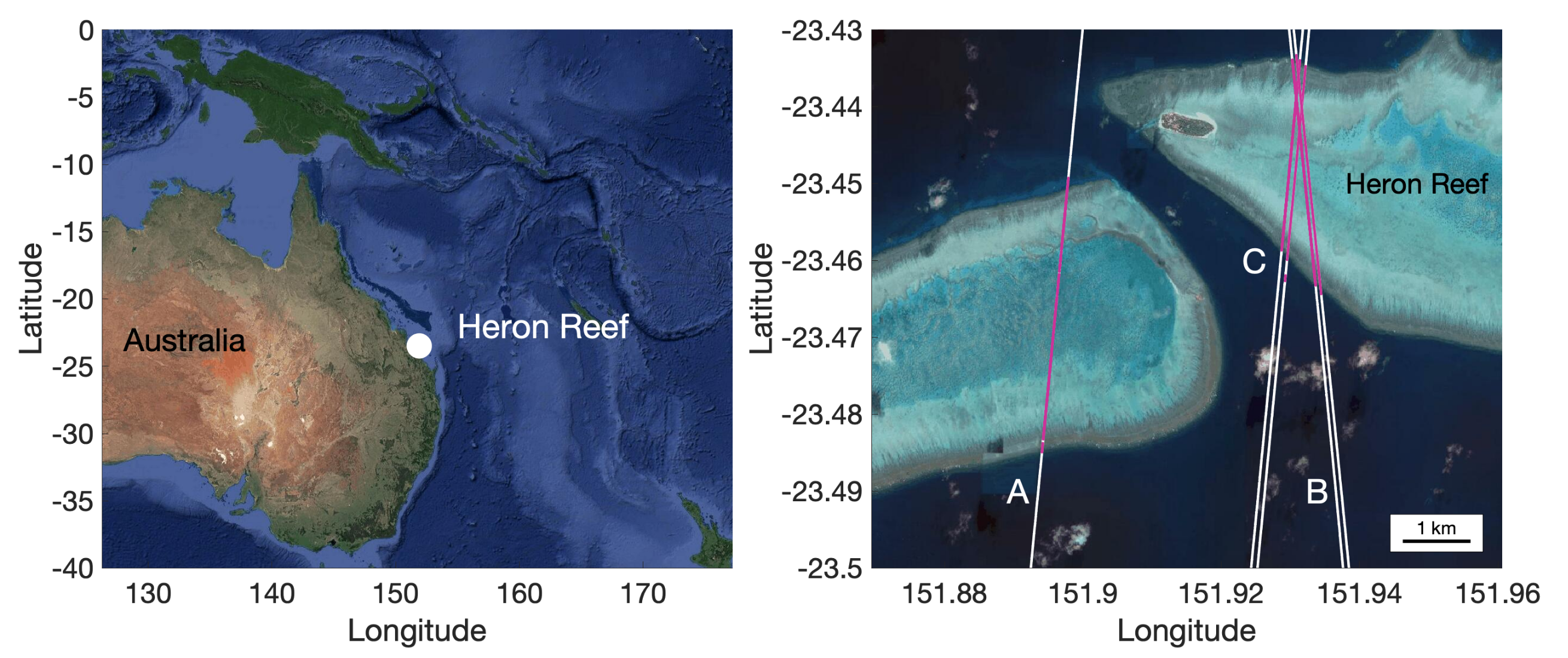
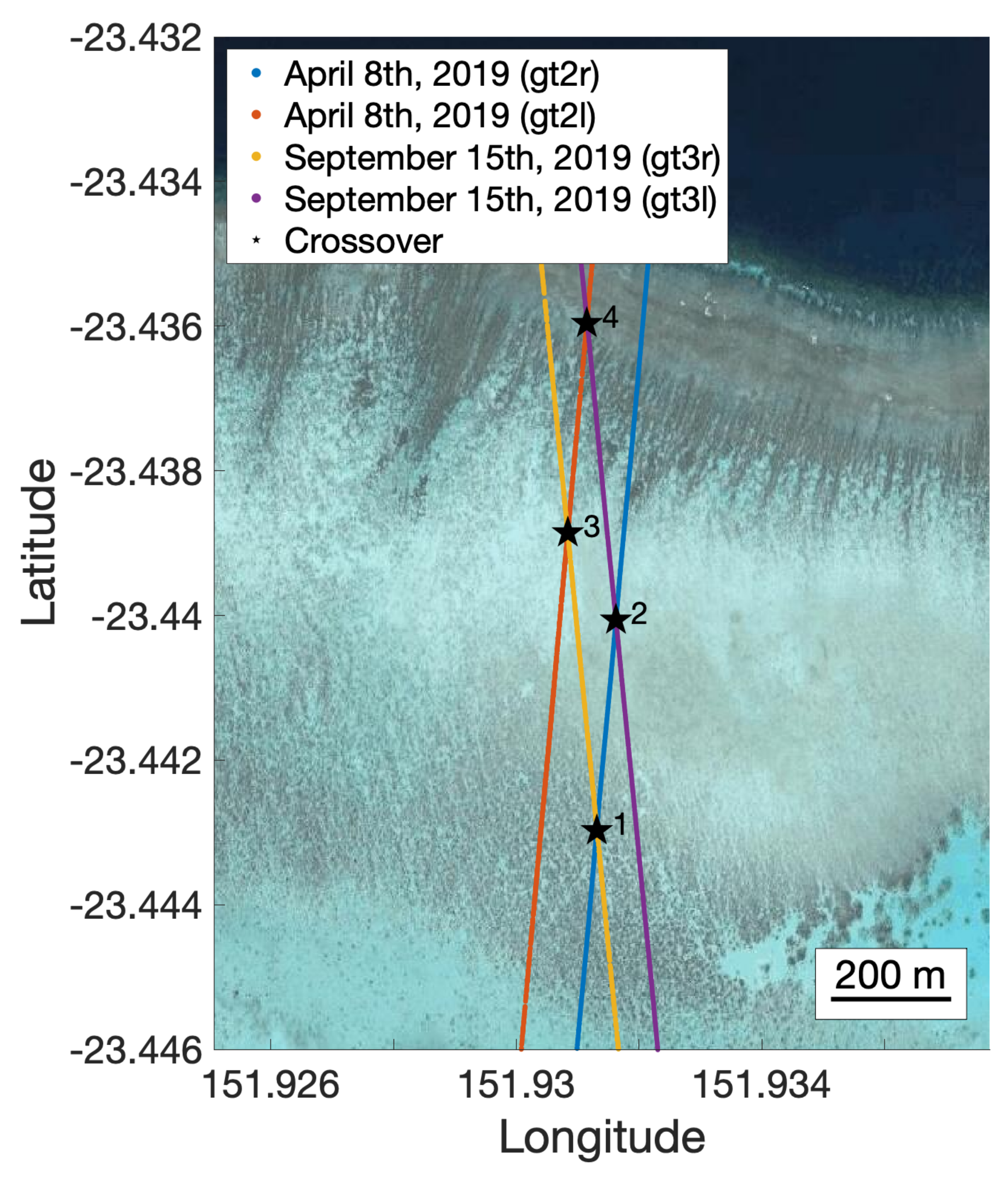
2.1. Heron Reef
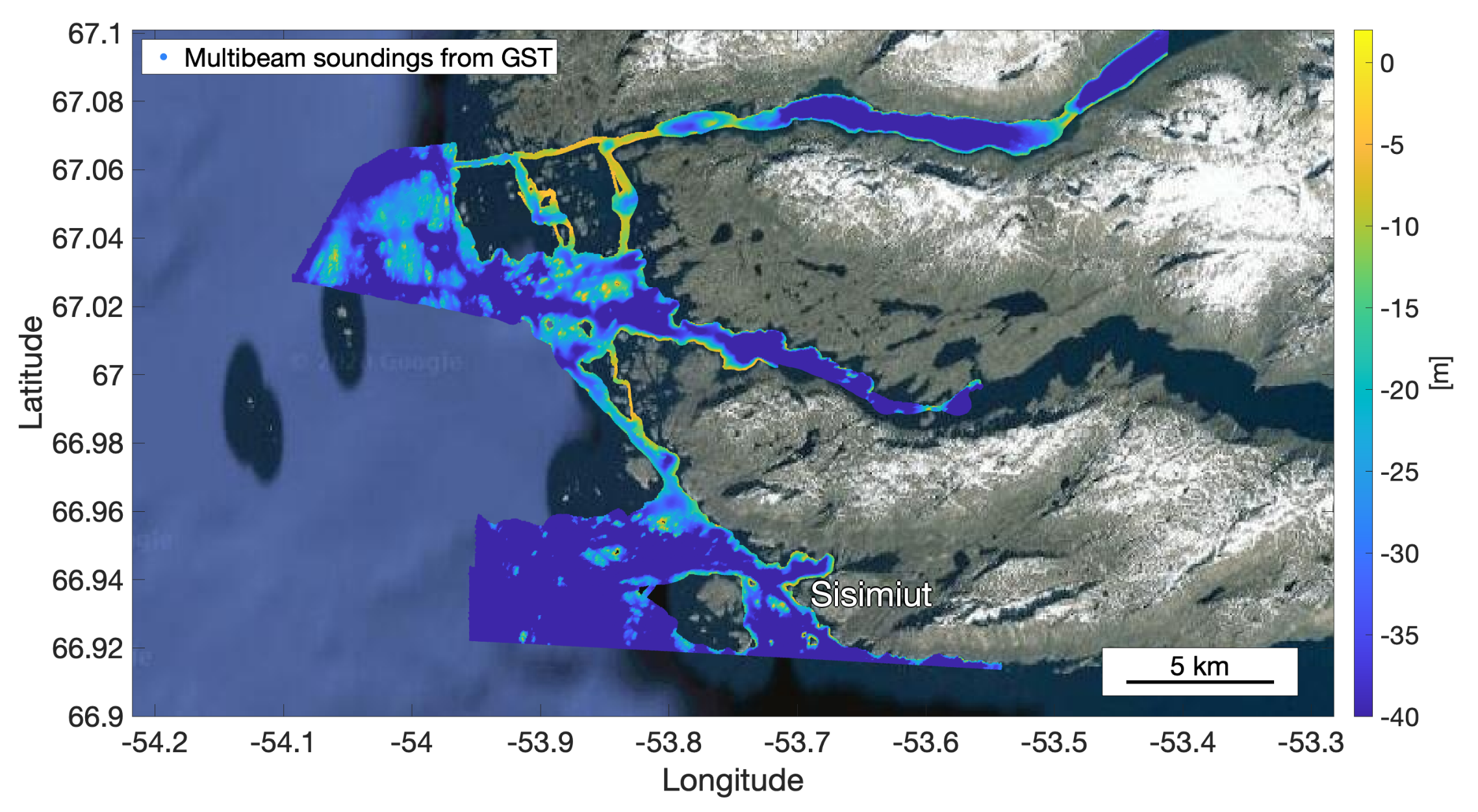
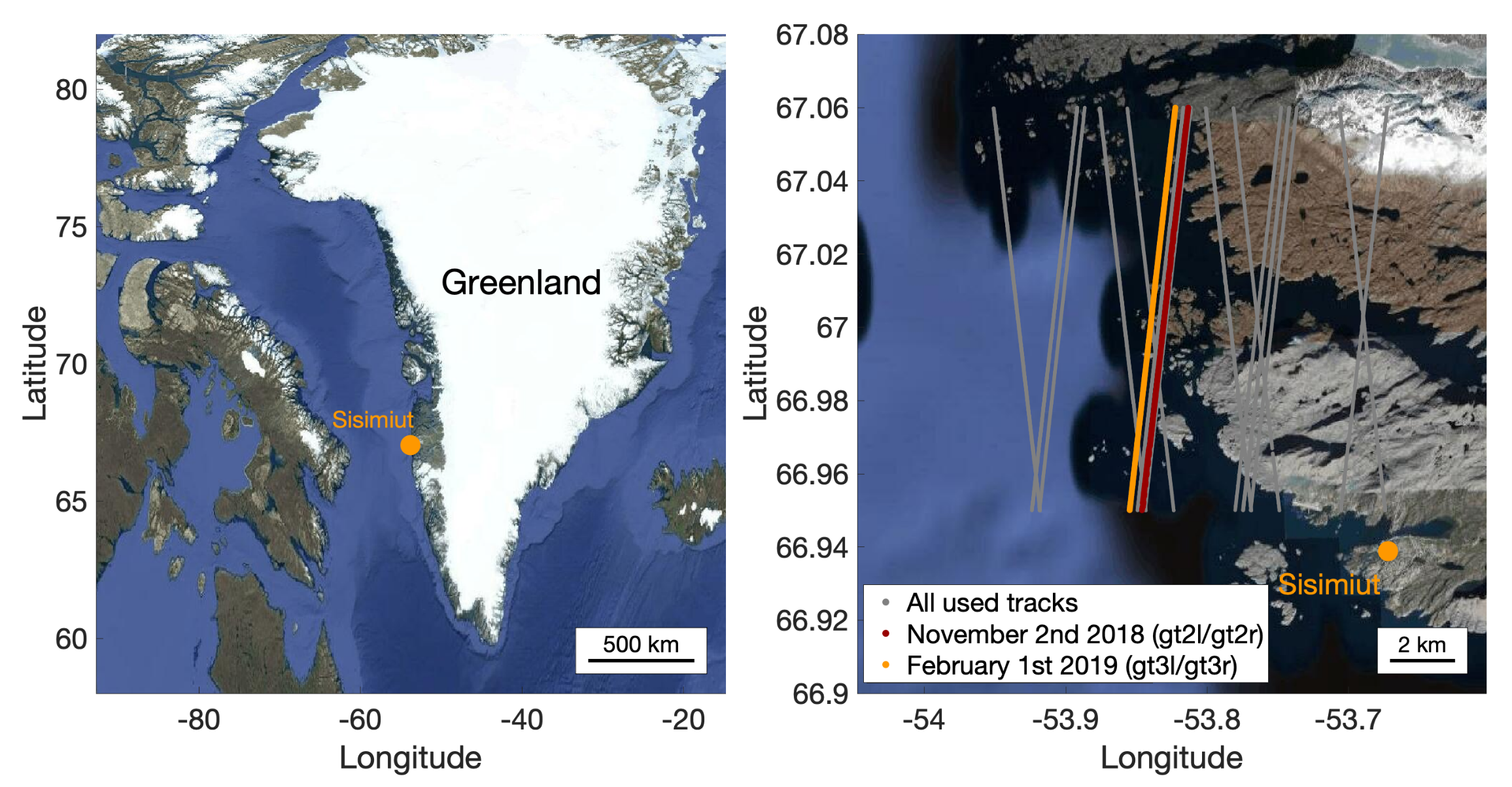
2.2. Sisimiut, Greenland
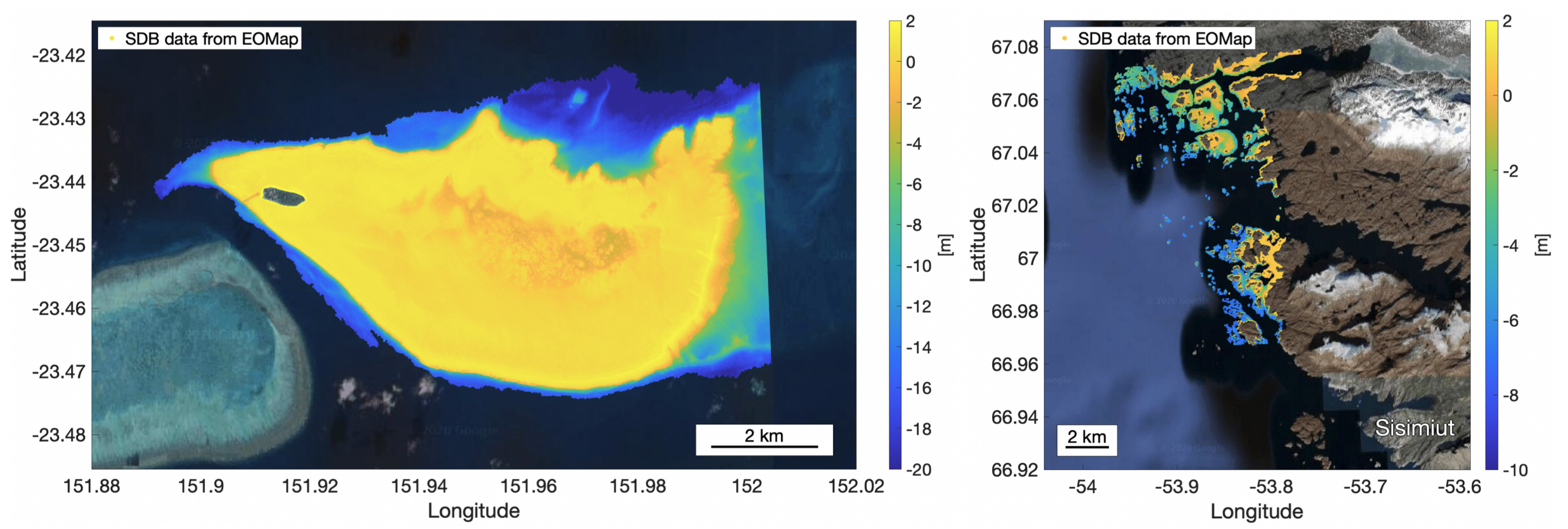
2.3. Satellite Derived Bathymetry from EOMAP
2.4. Multibeam Reference Data
2.5. ICESat-2 Data
2.6. Extracting Bathymetry Signals
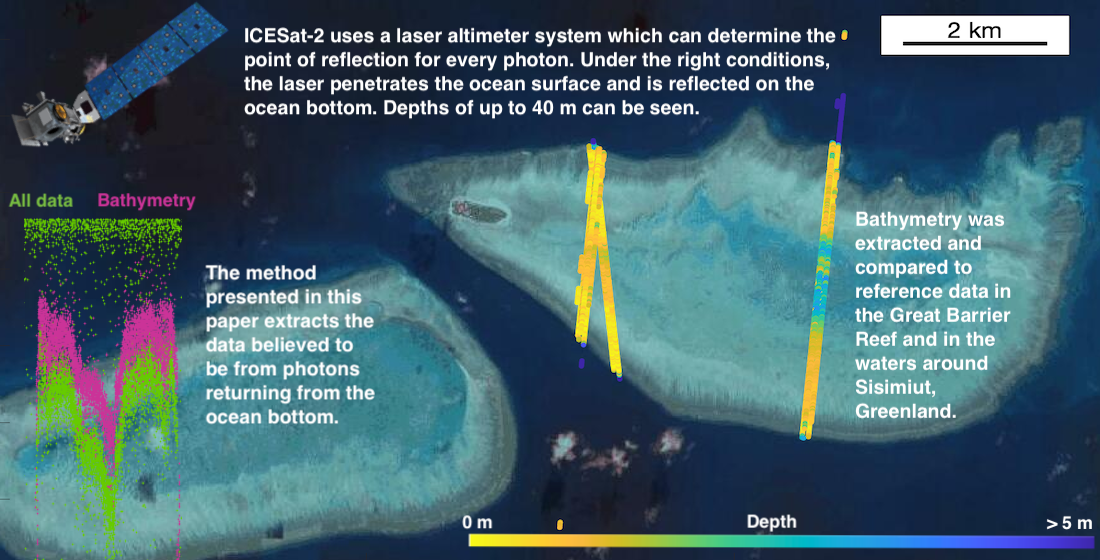
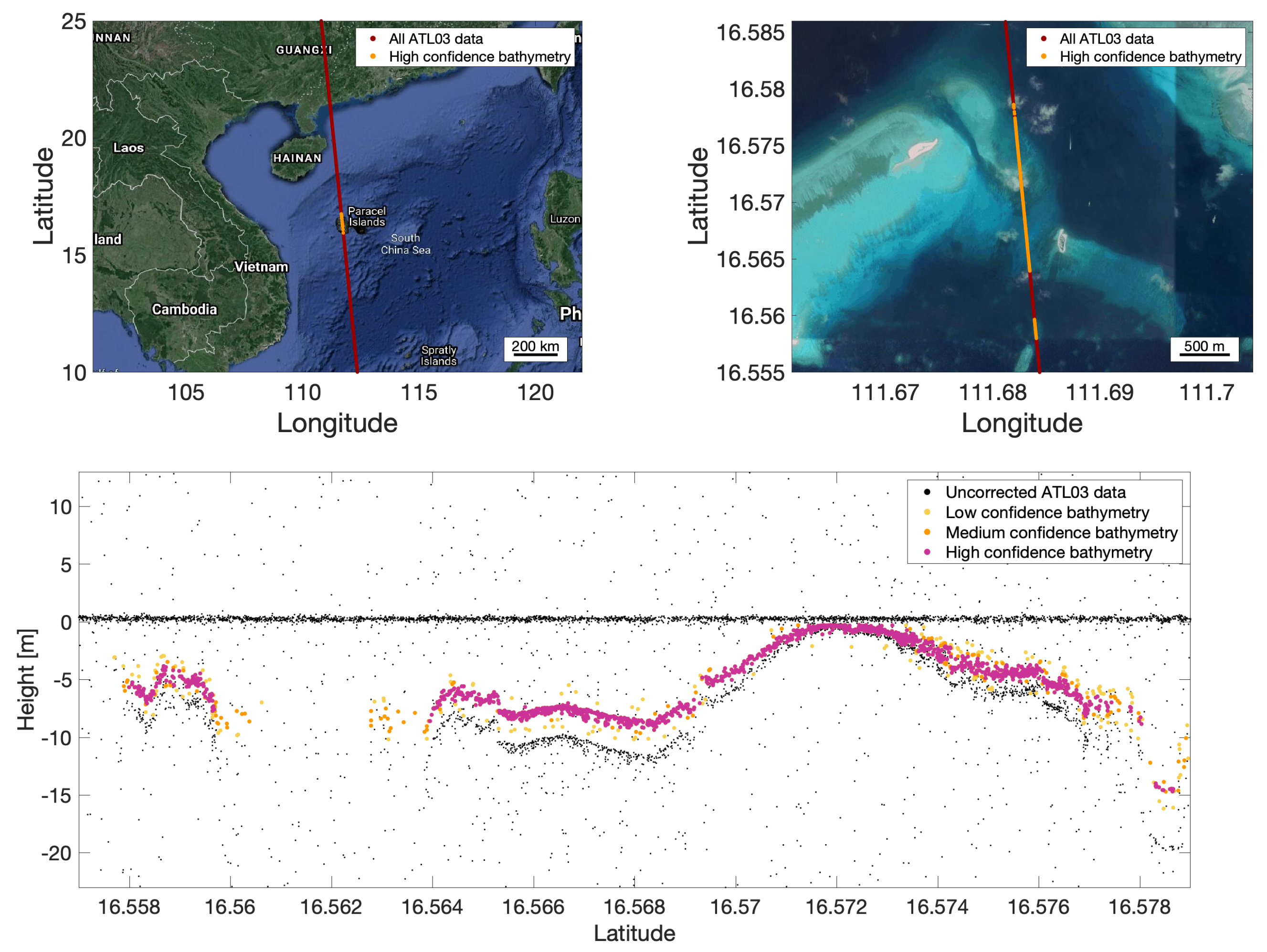
- All ATL03 photons with heights, H, above 5 m (referenced to the geoid) are removed. This is done to remove the majority of photons reflected by islands and the coast.
- The median height, , of all the remaining data points is found. In ocean tracks, this median will be very close to the sea surface, once the heights above 5 m have been removed as done in the first step. While the laser can penetrate the air/water interface, most of the reflections are from the sea surface and they therefore dominate the median height.
- After finding the median height, i.e., the sea surface, only data below this median are used onward. The algorithm uses a buffer, to account for sea surface reflections below the median height. Data points are only kept if they fulfil . At low latitudes, where the algorithm has been used in coral reefs, the buffer was set to 0.5 m. However, at high latitudes, the buffer had to be higher due to a less distinctive sea surface, i.e., waves and more scattering near the surface, and was set to 1 m. The size of the buffer was chosen manually after studying several tracks in different locations. More automatic methods were also attempted using various filters and moving standard deviations of the surface photons to set size of the buffer. However, due to various signals caused by different sea states and near-surface bathymetry/topography, such automatic methods often failed and did not improve the end result but only added to the complexity of the algorithm.
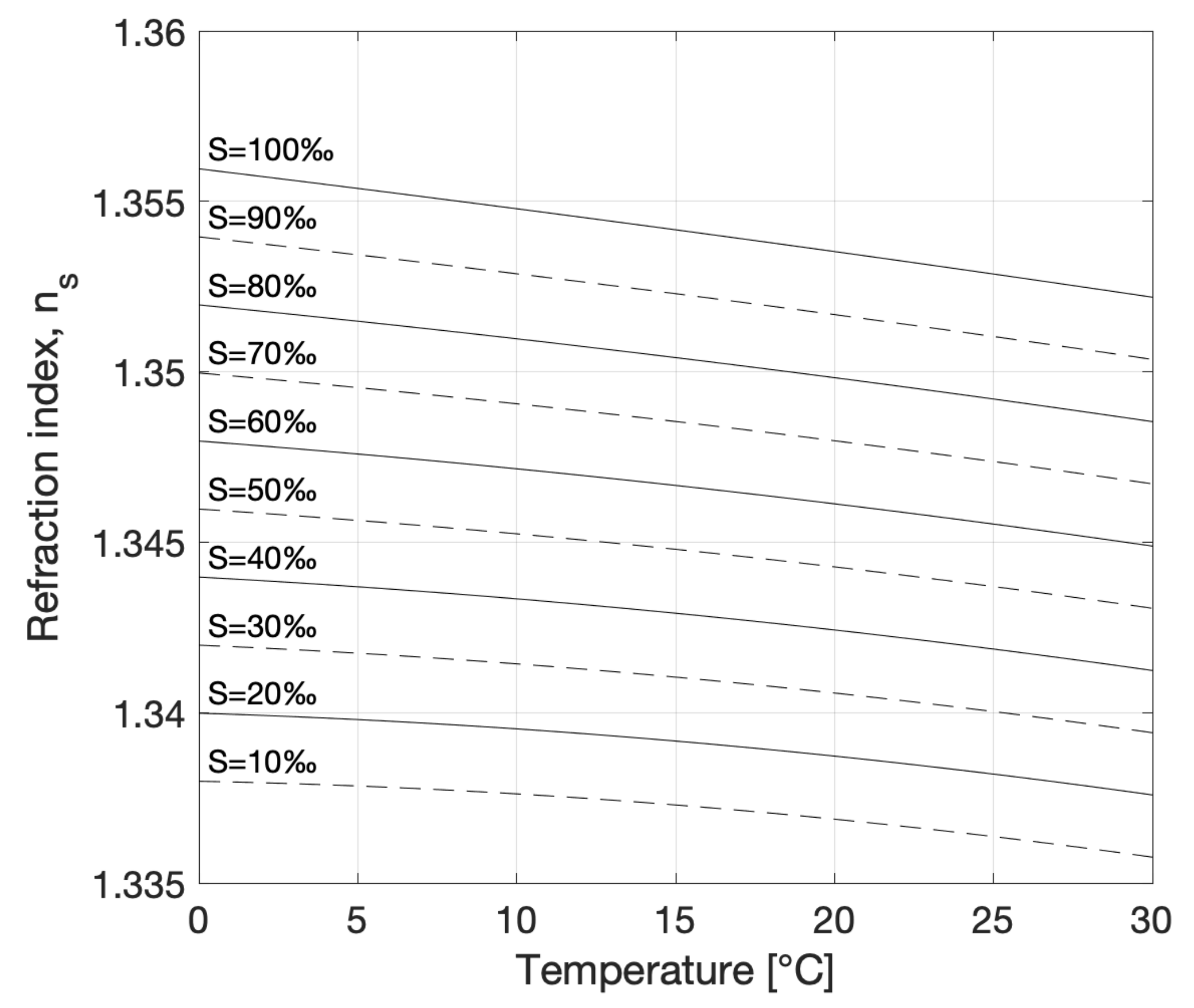
- All subsurface data are then corrected for refraction at the air-sea interface using the method described in Section 2.7.
- 5.
- A moving median with a window of 50 data points is calculated, and data more than 3 m away from this are removed.
- 6.
- Another moving median is calculated, this time using a window size of 30 points, resulting in . A moving standard deviation of the difference between this and each data points is calculated as well.
- 7.
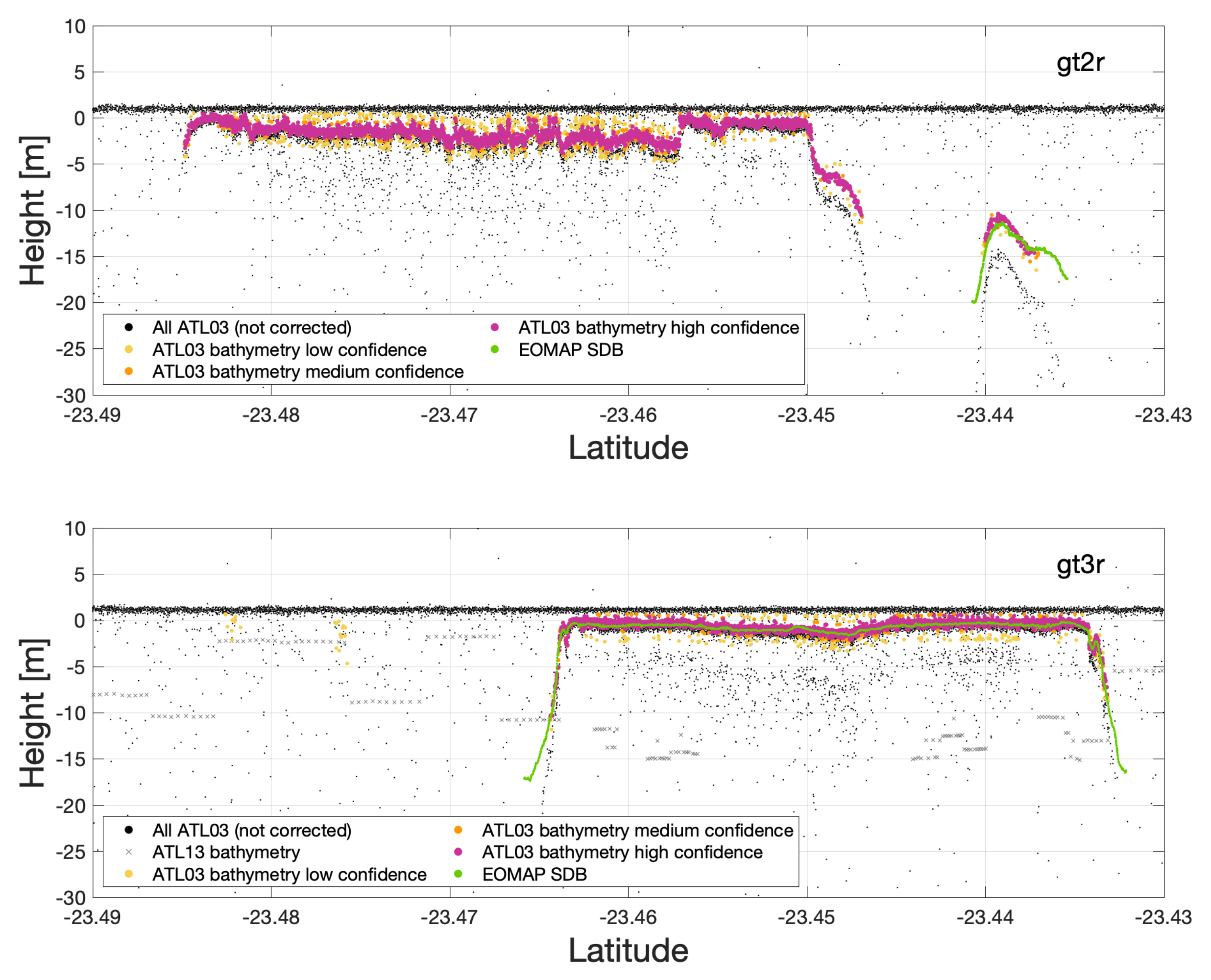
- Now, the data are divided into three groups: High, medium and low confidence bathymetry. Outliers are once again excluded, but this time using different thresholds. First, indexes for data within a distance, , of the just calculated moving median are found (see Equation (1)). The data within this distance and also with a moving standard deviation lower than are kept for further processing (See Equation (2)). Notice that the original heights are kept, whereas the smoothed heights are only used for finding the assumed bathymetry signals. The thresholds, and , are stated in Table 1 and were determined by studying the bathymetry signals of several tracks around the Heron Reef, Australia, the Red Sea, Egypt, and the Maldives.
- 8.
- Then, the data are divided into segments dependent on latitude. Each segment has a length of 0.001 degrees latitude, which corresponds to an along-track distance of roughly 100 m. For each segment it is determined how many data points lie within each segment for each confidence (low, medium, high). If there are less than 10 data points within a segment, the data are not considered as bathymetry data. This limit was found most appropriate for a number of different tracks, but is chosen empirically and the limit might be better suited for some tracks compared to others. The limit is introduced to make sure that there are enough photons left to believe that an actual bathymetry signal has been detected.
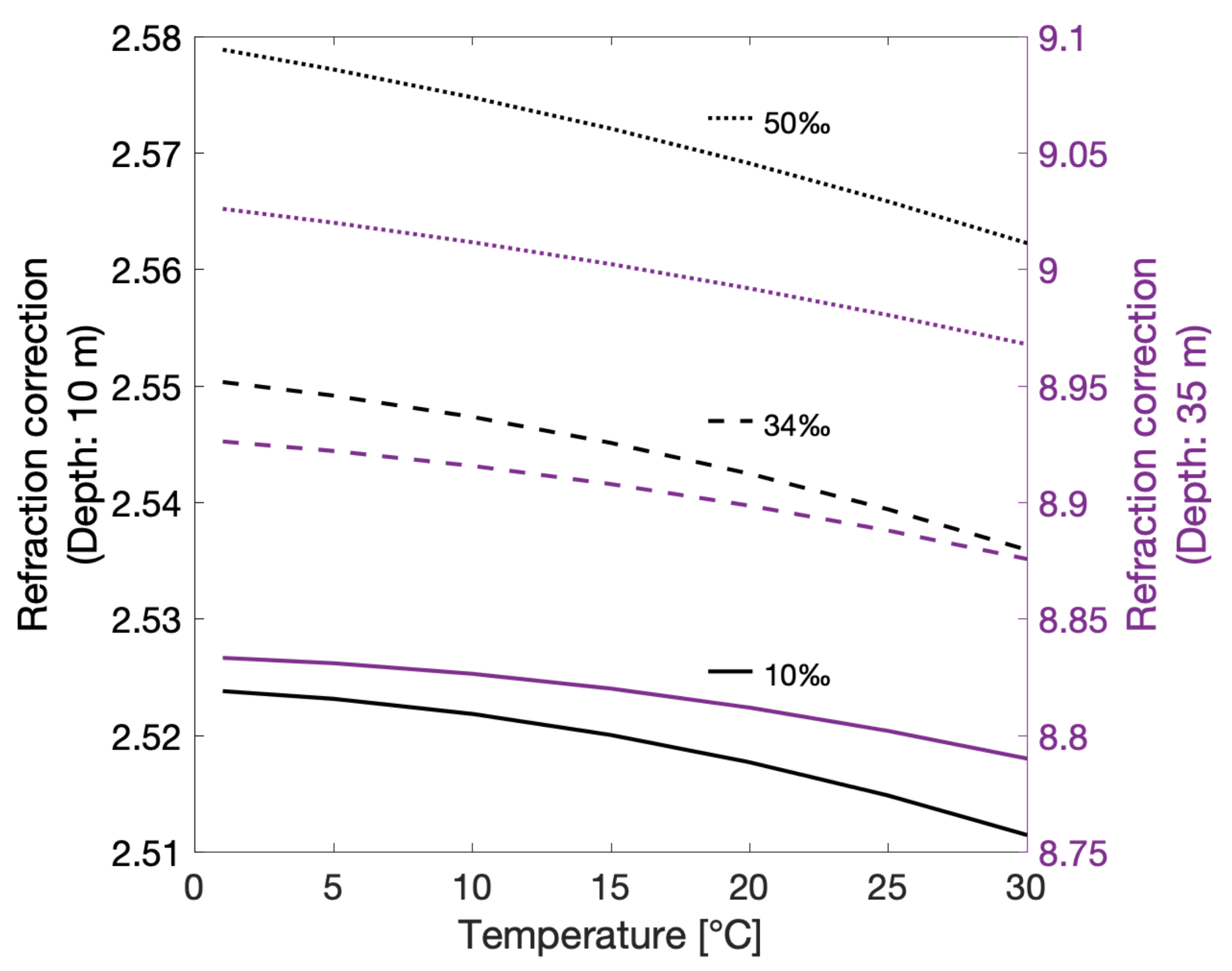
2.7. Refraction Correction
2.8. Comparison with Other Data Sources
3. Results
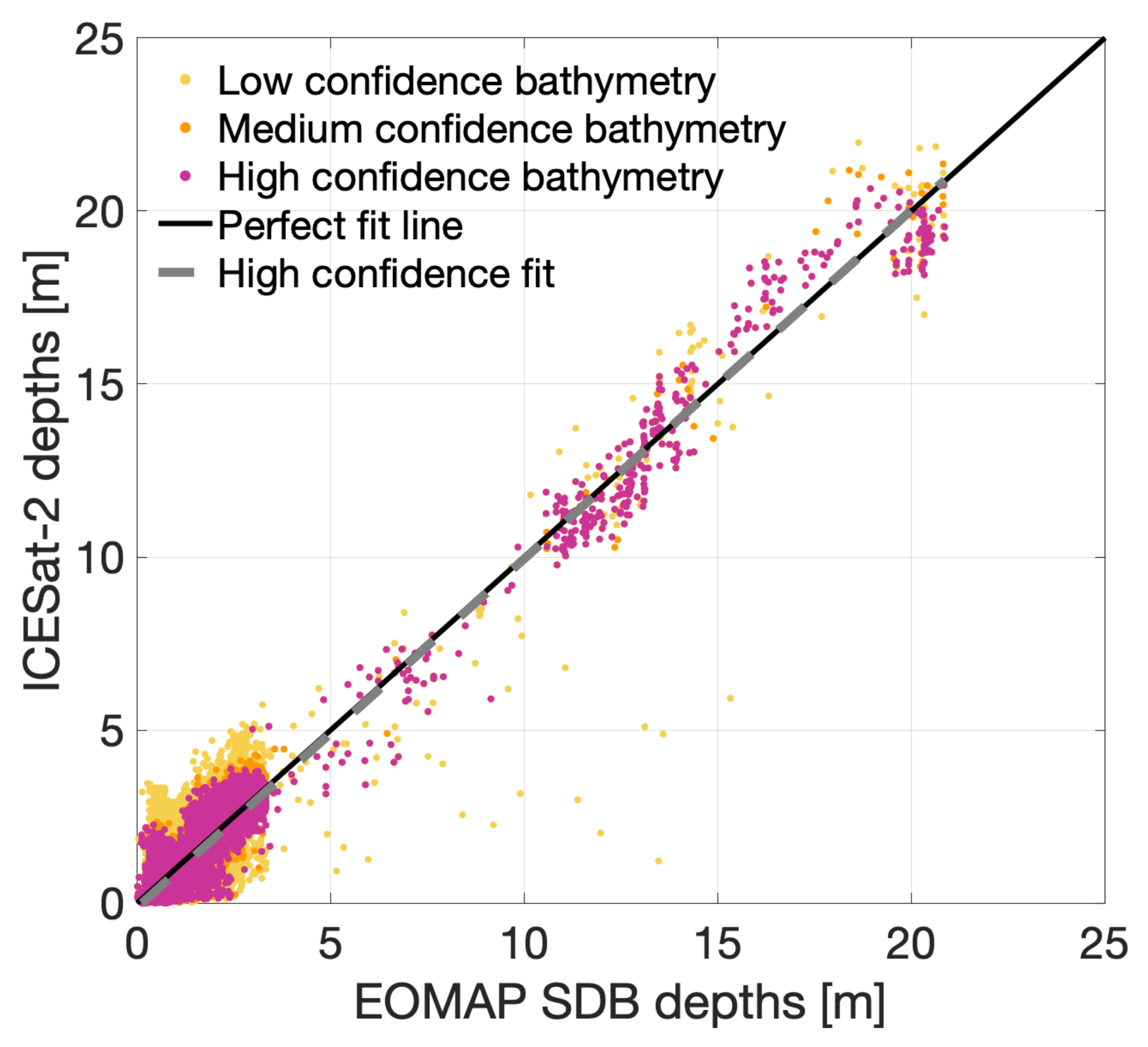
3.1. Heron Reef, Australia
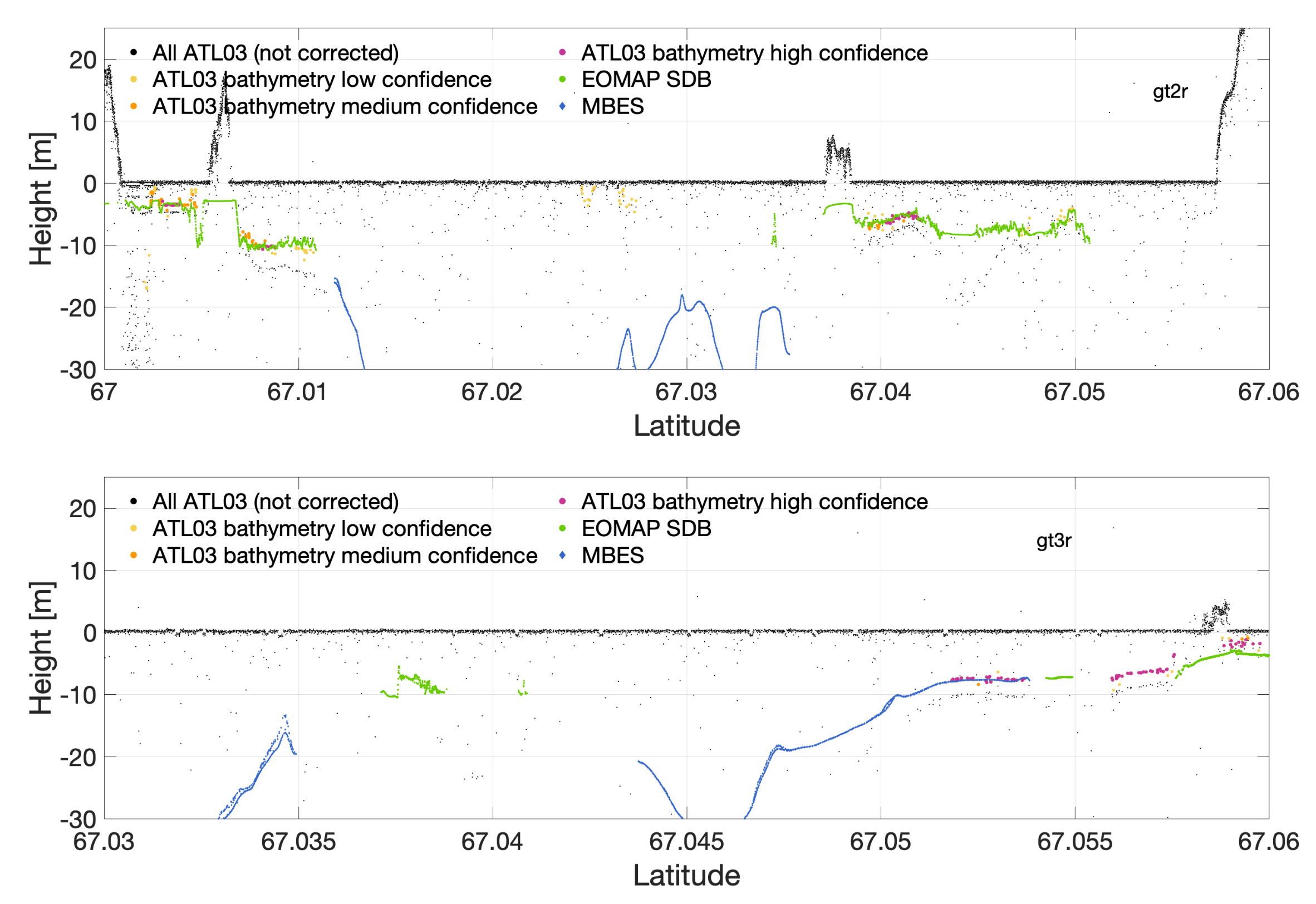
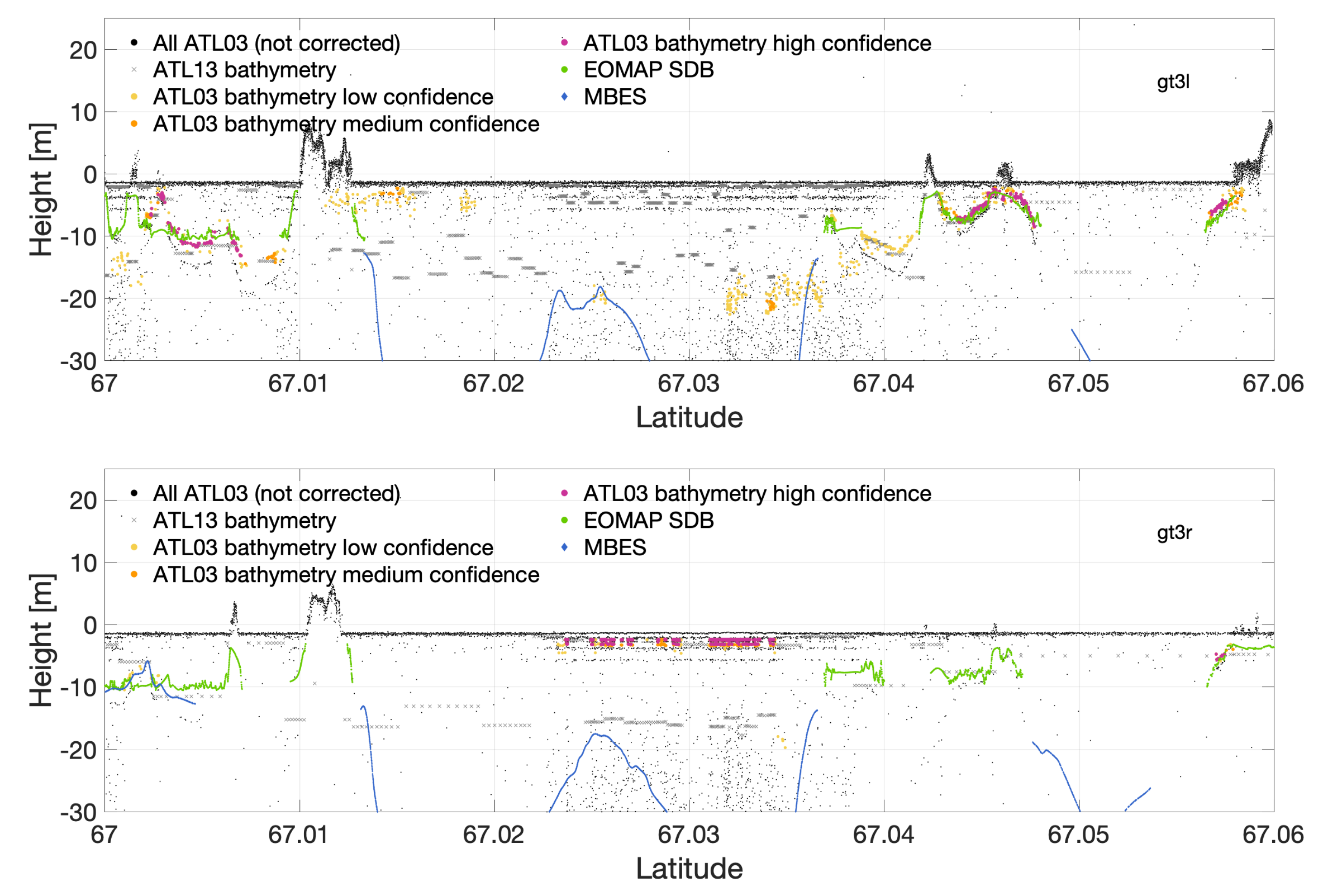
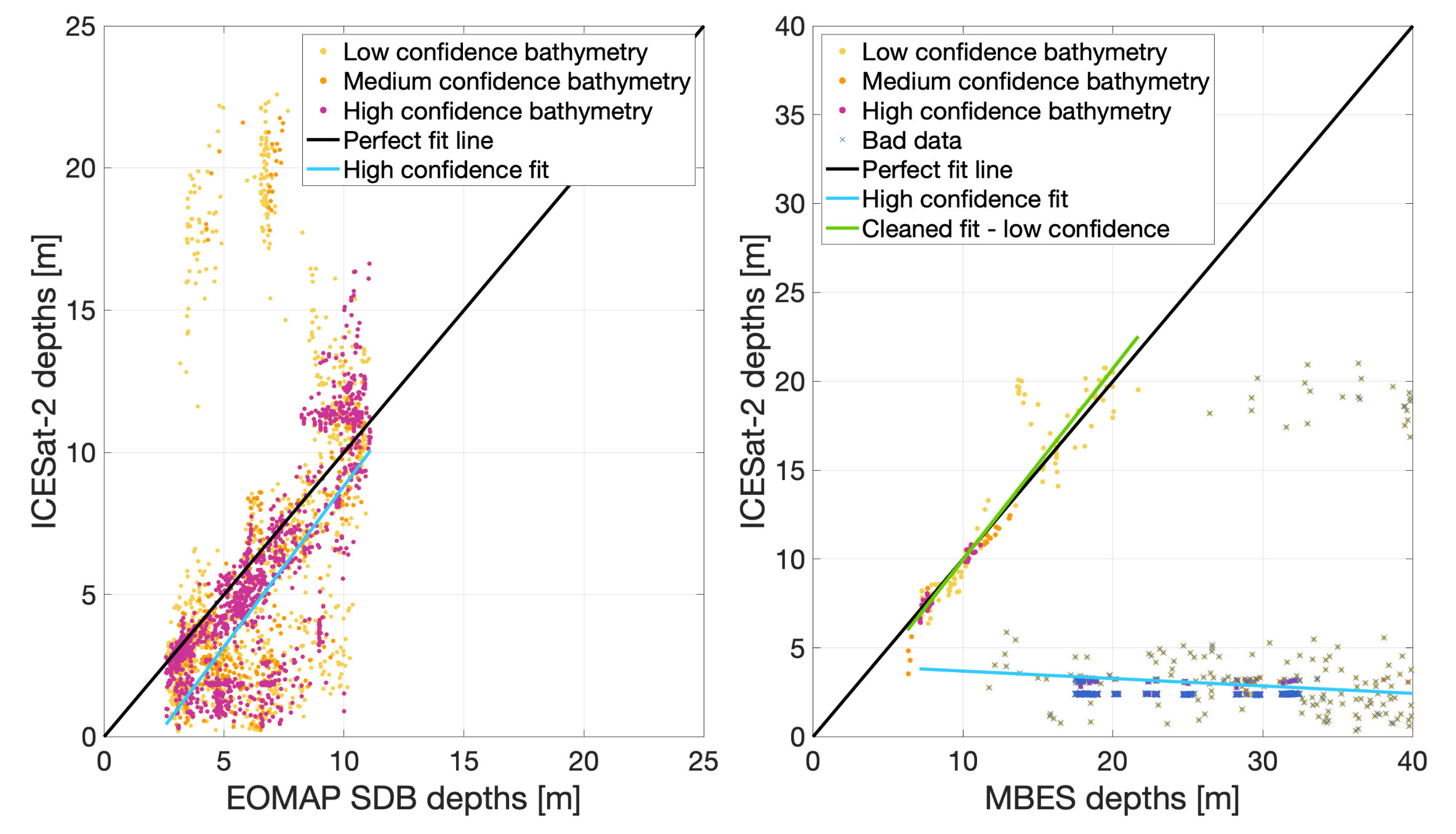
3.2. Sisimiut, Greenland
4. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hamden, M.H.; Din, A.H.M. A review of advancement of hydrographic surveying towards ellipsoidal referenced surveying technique. IOP Conf. Ser. Earth Environ. Sci. 2018, 169, 012019. [Google Scholar] [CrossRef]
- Micallef, A. Chapter Thirteen—Marine Geomorphology: Geomorphological Mapping and the Study of Submarine Landslides. In Geomorphological Mapping; Developments in Earth Surface Processes; Smith, M.J., Paron, P., Griffiths, J.S., Eds.; Elsevier: Amsterdam, The Netherlands, 2011; Volume 15, pp. 377–395. [Google Scholar] [CrossRef]
- Tewinkel, G. Water depths from aerial photographs. Photogramm. Eng. 1963, 29, 1037–1042. [Google Scholar]
- Murase, T.; Tanaka, M.; Tani, T.; Miyashita, Y.; Ohkawa, N.; Ishiguro, S.; Suzuki, Y.; Kayanne, H.; Yamano, H. A photogrammetric correction procedure for light refraction effects at a two-medium boundary. Photogramm. Eng. Remote Sens. 2008, 74, 1129–1136. [Google Scholar] [CrossRef]
- Cao, B.; Fang, Y.; Jiang, Z.; Gao, L.; Hu, H. Shallow water bathymetry from WorldView-2 stereo imagery using two-media photogrammetry. Eur. J. Remote Sens. 2019, 52, 506–521. [Google Scholar] [CrossRef] [Green Version]
- Hodúl, M.; Bird, S.; Knudby, A.; Chénier, R. Satellite derived photogrammetric bathymetry. ISPRS J. Photogramm. Remote Sens. 2018, 142, 268–277. [Google Scholar] [CrossRef]
- Arsen, A.; Crétaux, J.F.; Berge-Nguyen, M.; Del Rio, R.A. Remote Sensing-Derived Bathymetry of Lake Poopó. Remote Sens. 2014, 6, 407–420. [Google Scholar] [CrossRef] [Green Version]
- Parrish, C.E.; Magruder, L.A.; Neuenschwander, A.L.; Forfinski-Sarkozi, N.; Alonzo, M.; Jasinski, M. Validation of ICESat-2 ATLAS Bathymetry and Analysis of ATLAS’s Bathymetric Mapping Performance. Remote Sens. 2019, 11, 1634. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Xu, N.; Liu, Z.; Yang, B.; Yang, F.; Wang, X.H.; Li, S. Satellite-derived bathymetry using the ICESat-2 lidar and Sentinel-2 imagery datasets. Remote Sens. Environ. 2020, 250, 112047. [Google Scholar] [CrossRef]
- Thomas, N.; Pertiwi, A.P.; Traganos, D.; Lagomasino, D.; Poursanidis, D.; Moreno, S.; Fatoyinbo, L. Space-Borne Cloud-Native Satellite-Derived Bathymetry (SDB) Models Using ICESat-2 And Sentinel-2. Geophys. Res. Lett. 2021, 48, e2020GL092170. [Google Scholar] [CrossRef]
- Babbel, B.J.; Parrish, C.E.; Magruder, L.A. ICESat-2 Elevation Retrievals in Support of Satellite-Derived Bathymetry for Global Science Applications. Geophys. Res. Lett. 2021, 48, e2020GL090629. [Google Scholar] [CrossRef]
- Albright, A.; Glennie, C. Nearshore Bathymetry from Fusion of Sentinel-2 and ICESat-2 Observations. IEEE Geosci. Remote Sens. Lett. 2021, 18, 9086432. [Google Scholar] [CrossRef]
- Goodrich, K.; Smith, R. ICESat-2 Space-Based Laser Validation for Satellite-Derived Bathymetry in NSF-Funded Research. Sea Technol. 2020, 61, 15–20. [Google Scholar]
- Fair, Z.; Flanner, M.; Brunt, K.M.; Amanda Fricker, H.; Gardner, A. Using ICESat-2 and Operation IceBridge altimetry for supraglacial lake depth retrievals. Cryosphere 2020, 14, 4253. [Google Scholar] [CrossRef]
- Fricker, H.A.; Arndt, P.; Brunt, K.M.; Datta, R.T.; Fair, Z.; Jasinski, M.F.; Kingslake, J.; Magruder, L.A.; Moussavi, M.; Pope, A.; et al. ICESat-2 Meltwater Depth Estimates: Application to Surface Melt on Amery Ice Shelf, East Antarctica. Geophys. Res. Lett. 2021, 48, e2020GL090550. [Google Scholar] [CrossRef]
- Australian Institute of Marine Science (AIMS). Sea Water Temperature Logger Data at Heron Island, Great Barrier Reef from 24 Nov 1995 to 18 Dec 2020; Technical Report. Available online: https://apps.aims.gov.au/metadata/view/446a0e73-7c30-4712-9ddb-ba1fc29b8b9a (accessed on 8 April 2021).
- Skerratt, J.; Mongin, M.; Baird, M.; Wild-Allen, K.; Robson, B.; Schaffelke, B.; Davies, C.; Richardson, A.; Margvelashvili, N.; Soja-Wozniak, M.; et al. Simulated nutrient and plankton dynamics in the Great Barrier Reef (2011–2016). J. Mar. Syst. 2019, 192, 51–74. [Google Scholar] [CrossRef]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters. I. A semianalytical model. Appl. Opt. 1998, 37, 6329–6338. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [Green Version]
- Kiselev, V.; Bulgarelli, B.; Heege, T. Sensor independent adjacency correction algorithm for coastal and inland water systems. Remote Sens. Environ. 2014, 157, 85–95. [Google Scholar] [CrossRef]
- Heege, T.; Kiselev, V.; Wettle, M.; Hung, N.N. Operational multi-sensor monitoring of turbidity for the entire Mekong Delta. Int. J. Remote Sens. 2014, 35, 2910–2926. [Google Scholar] [CrossRef]
- Cerdeira-Estrada, S.; Heege, T.; Kolb, M.; Ohlendorf, S.; Uribe, A.; Muller, A.; Garza, R.; Ressl, R.; Aguirre, R.; Marino, I.; et al. Benthic habitat and bathymetry mapping of shallow waters in Puerto morelos reefs using remote sensing with a physics based data processing. In Proceedings of the International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; p. 6350402. [Google Scholar] [CrossRef]
- Siermann, J.; Harvey, C.; Morgan, G.; Heege, T. Satellite derived bathymetry and Digital Elevation Models (DEM). In Proceedings of the IPTC 2014 International Petroleum Technology Conference, Doha, Qatar, 19–22 January 2014; 2, pp. 1284–1293. [Google Scholar] [CrossRef]
- Andersen, O.; Stenseng, L.; Piccioni, G.; Knudsen, P. The DTU15 MSS (Mean Sea Surface) and DTU15LAT (Lowest Astronomical Tide) reference surface. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Replubic, 9–13 May 2016. [Google Scholar]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- International Hydrographic Bureau. International Hydrographic Organization (2008) IHO Standards for Hydrographic Surveys; Technical Report; International Hydrographic Bureau: Monaco City, Monaco, 2020. [Google Scholar]
- Klotz, B.W.; Neuenschwander, A.; Magruder, L.A. High-Resolution Ocean Wave and Wind Characteristics Determined by the ICESat-2 Land Surface Algorithm. Geophys. Res. Lett. 2020, 47, e2019GL085907. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Neumann, T.A.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K.; Gibbons, A.; Lee, J.; Luthcke, S.B.; Rebold, T. ATLAS/ICESat-2 L2A Global Geolocated Photon Data, Version 3. ATL03; NASA National Snow and Ice Data Center Distributed Active Archive Center (NSIDC DAAC): Boulder, CO, USA. [CrossRef]
- Jasinski, M.F.; Stoll, J.D.; Hancock, D.; Robbins, J.; Nattala, J.; Morison, J.; Jones, B.M.; Ondrusek, M.E.; Pavelsky, T.M.; Parrish, C. Algorithm Theoretical Basis Document (ATBD) for Inland Water Data Products, ATL13, Version 3, Release Date 1 March. 2020. Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/ICESat2_ATL13_ATBD_r003.pdf (accessed on 8 April 2021).
- Jasinski, M.F.; Stoll, J.D.; Hancock, D.; Robbins, J.; Nattala, J.; Morison, J.; Jones, B.M.; Ondrusek, M.E.; Pavelsky, T.M.; Parrish, C. ATL13 Product Data Dictionary for Inland Water Data Products, ATL13, Version 3, Release Date 3 February 2020. 2020. Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/ICESat2_ATL13_data_dict_v003.pdf (accessed on 8 April 2021).
- Ribergaard, M.H. Oceanographic Investigations Off West Greenland 2013; Technical Report; Danish Meteorological Institute, Centre for Ocean and Ice: Copenhagen, Denmark, 2013; Available online: http://ocean.dmi.dk/staff/mhri/Docs/scr14-001.pdf (accessed on 8 April 2021).
- Quan, X.; Fry, E.S. Empirical equation for the index of refraction of seawater. Appl. Opt. 1995, 34, 3477–3480. [Google Scholar] [CrossRef] [PubMed]
- Meier, H.E.M.; Kauker, F. Modeling decadal variability of the Baltic Sea: 2. Role of freshwater inflow and large-scale atmospheric circulation for salinity. J. Geophys. Res. Ocean. 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Sharifi, A.; Shah-Hosseini, M.; Pourmand, A.; Esfahaninejad, M.; Haeri-Ardakani, O. The Vanishing of Urmia Lake: A Geolimnological Perspective on the Hydrological Imbalance of the World’s Second Largest Hypersaline Lake; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–38. [Google Scholar] [CrossRef]
- Pérez, E.; Chebude, Y. Chemical Analysis of Gaet’ale, a Hypersaline Pond in Danakil Depression (Ethiopia): New Record for the Most Saline Water Body on Earth. Aquat. Geochem. 2017, 23, 109–117. [Google Scholar] [CrossRef]
- Amidror, I. Scattered data interpolation methods for electronic imaging systems: A survey. J. Electron. Imaging 2002, 11, 157–176. [Google Scholar] [CrossRef]
- Neumann, T.A.; Brenner, A.; Hancock, D.; Robbins, J.; Saba, J.; Harbeck, K.; Gibbons, A.; Lee, J.; Luthcke, S.B.; Rebold, T. Algorithm Theoretical Basis Document (ATBD) for Global Geolocated Photons ATL03, Version 3, Release Date 1 April 2020. 2020. Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/ICESat2_ATL03_ATBD_r003.pdf (accessed on 8 April 2020).
- Neuenschwander, A.L.; Magruder, L.A. Canopy and terrain height retrievals with ICESat-2: A first look. Remote Sens. 2019, 11, 1721. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Threshold | Low | Medium | High |
|---|---|---|---|
| 0.75 m | 1 m | 2 m | |
| 1.5 m | 2 m | 4 m |
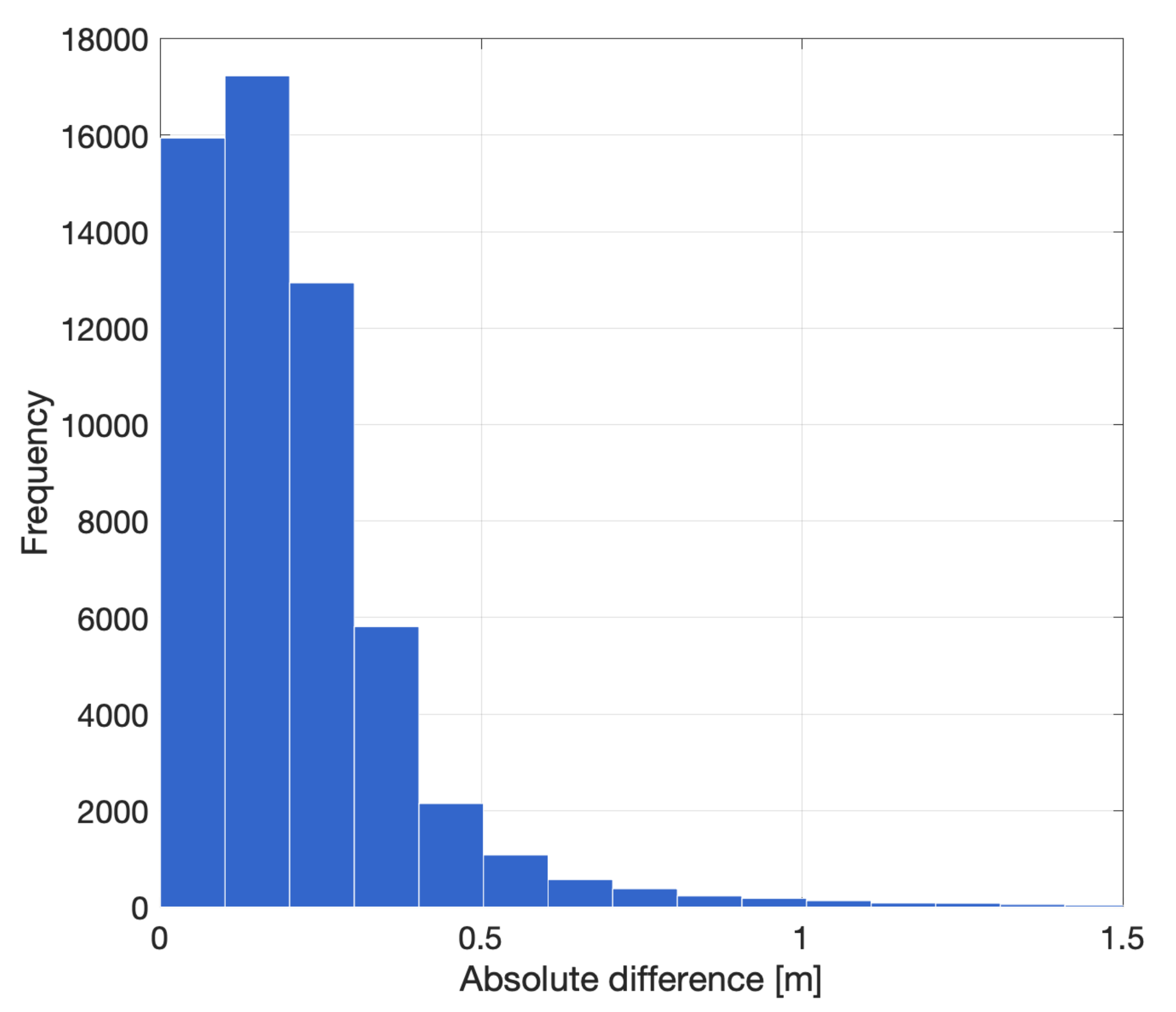
| Statistic | Low Confidence [62568] | Medium Confidence [59681] | High Confidence [58740] |
|---|---|---|---|
| Median abs. dev. | 0.19 m | 0.18 m | 0.18 m |
| Mean abs. dev. | 0.28 m | 0.22 m | 0.21 m |
| Standard dev. | 0.35 m | 0.21 m | 0.19 m |
| RMSE | 0.45 m | 0.31 m | 0.28 m |
| No Smoothing | ★1 | ★2 | ★3 | ★4 |
|---|---|---|---|---|
| 8 April 2019 | −0.32 m | −0.55 m | −0.12 m | −0.60 m |
| 15 September 2019 | −0.24 m | −0.21 m | −0.11 m | −0.78 m |
| Absolute difference | 0.08 m | 0.34 m | 0.01 m | 0.18 m |
| Gaussian Weighted Moving Average | ★ 1 | ★ 2 | ★ 3 | ★ 4 |
| 8 April 2019 | −0.28 m | − 0.21 m | −0.20 m | −0.45 m |
| 15 September 2019 | −0.30 m | −0.13 m | −0.20 m | −0.48 m |
| Absolute difference | 0.02 m | 0.08 m | 0.00 m | 0.03 m |
| Statistic | Low Confidence SDB[3057]/MBES * [153] | Medium Confidence SDB[2100]/MBES * [64] | High Confidence SDB[1691]/MBES * [47] |
|---|---|---|---|
| Mean abs. dev. [m] | 2.76/0.93 | 2.30/0.48 | 2.21/0.32 |
| Med. abs. dev. [m] | 1.73/0.49 | 1.59/0.37 | 1.57/0.33 |
| Std. dev. [m] | 3.04/1.28 | 2.19/0.44 | 1.85/0.14 |
| Correlation | 0.51/0.94 | 0.68/0.97 | 0.74/0.98 |
| RMSE [m] | 4.11/1.58 | 3.18/0.65 | 2.89/0.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ranndal, H.; Sigaard Christiansen, P.; Kliving, P.; Baltazar Andersen, O.; Nielsen, K. Evaluation of a Statistical Approach for Extracting Shallow Water Bathymetry Signals from ICESat-2 ATL03 Photon Data. Remote Sens. 2021, 13, 3548. https://doi.org/10.3390/rs13173548
Ranndal H, Sigaard Christiansen P, Kliving P, Baltazar Andersen O, Nielsen K. Evaluation of a Statistical Approach for Extracting Shallow Water Bathymetry Signals from ICESat-2 ATL03 Photon Data. Remote Sensing. 2021; 13(17):3548. https://doi.org/10.3390/rs13173548
Chicago/Turabian StyleRanndal, Heidi, Philip Sigaard Christiansen, Pernille Kliving, Ole Baltazar Andersen, and Karina Nielsen. 2021. "Evaluation of a Statistical Approach for Extracting Shallow Water Bathymetry Signals from ICESat-2 ATL03 Photon Data" Remote Sensing 13, no. 17: 3548. https://doi.org/10.3390/rs13173548
APA StyleRanndal, H., Sigaard Christiansen, P., Kliving, P., Baltazar Andersen, O., & Nielsen, K. (2021). Evaluation of a Statistical Approach for Extracting Shallow Water Bathymetry Signals from ICESat-2 ATL03 Photon Data. Remote Sensing, 13(17), 3548. https://doi.org/10.3390/rs13173548