
Reliability Evaluation of the Joint Observation of Cloud Top Height by FY-4A and HIMAWARI-8


Abstract
:
1. Introduction
2. Data
3. Results
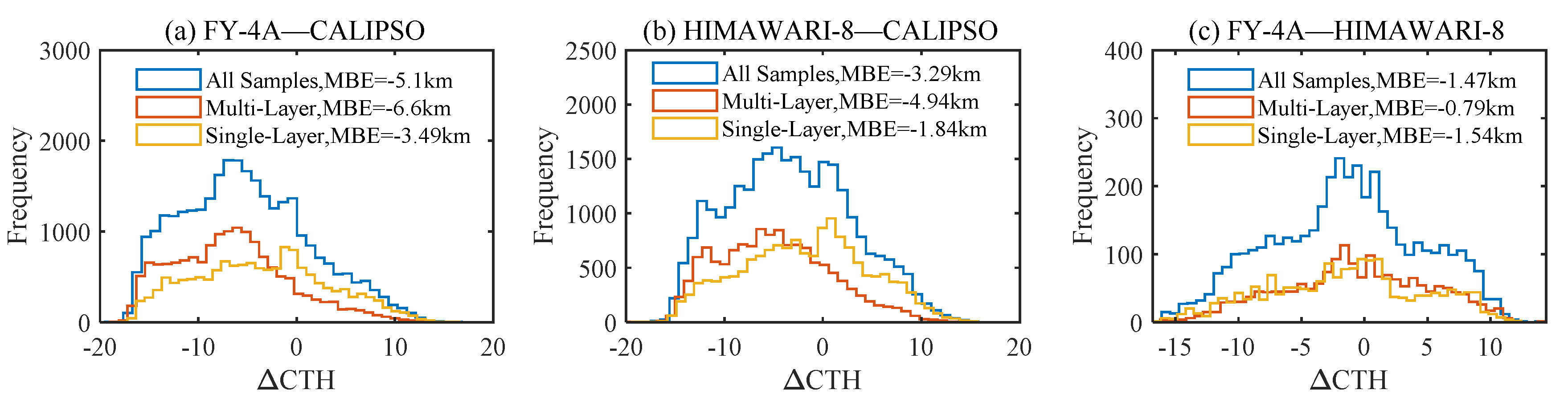
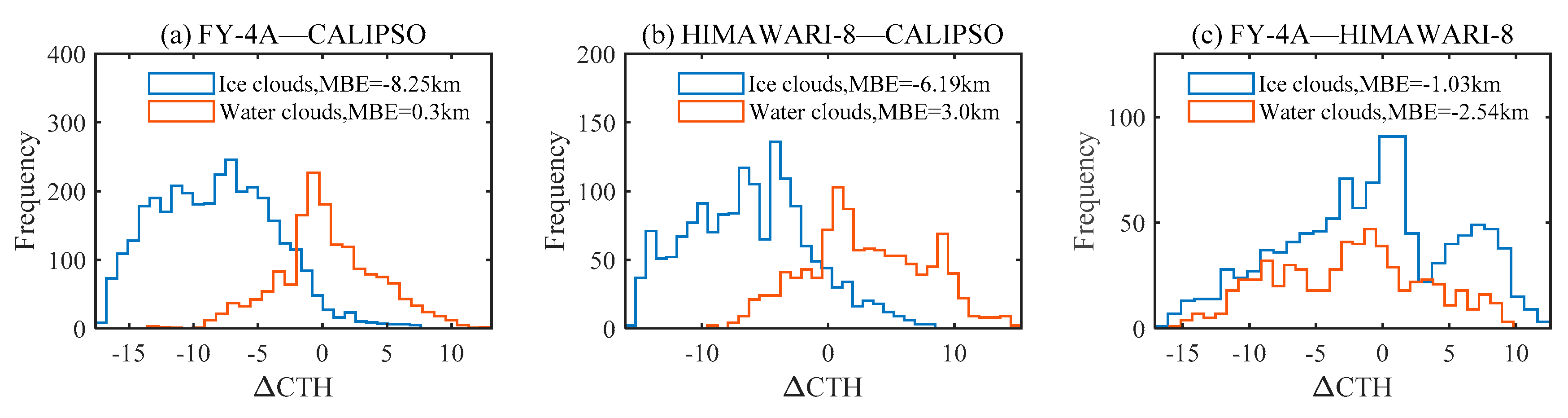
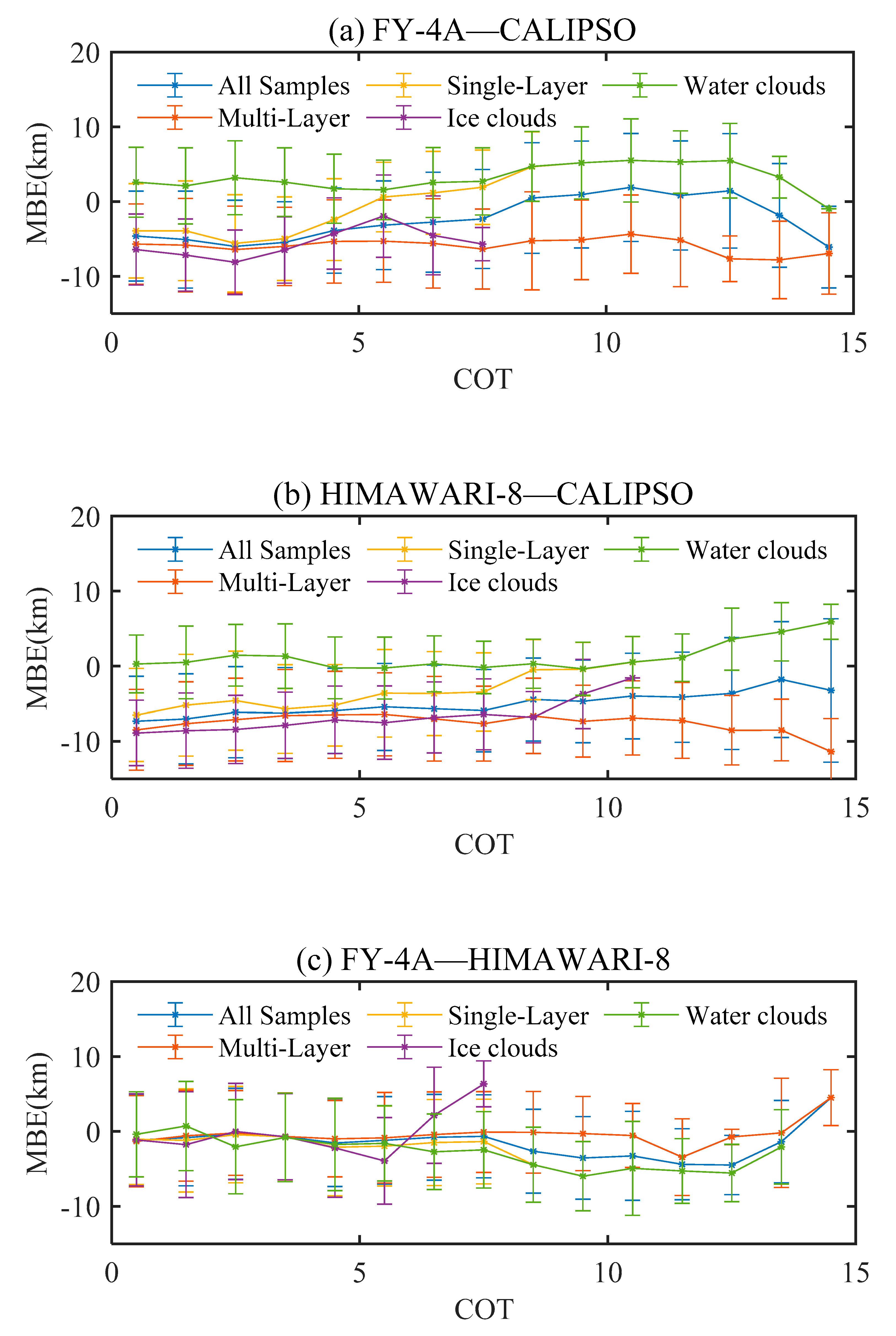
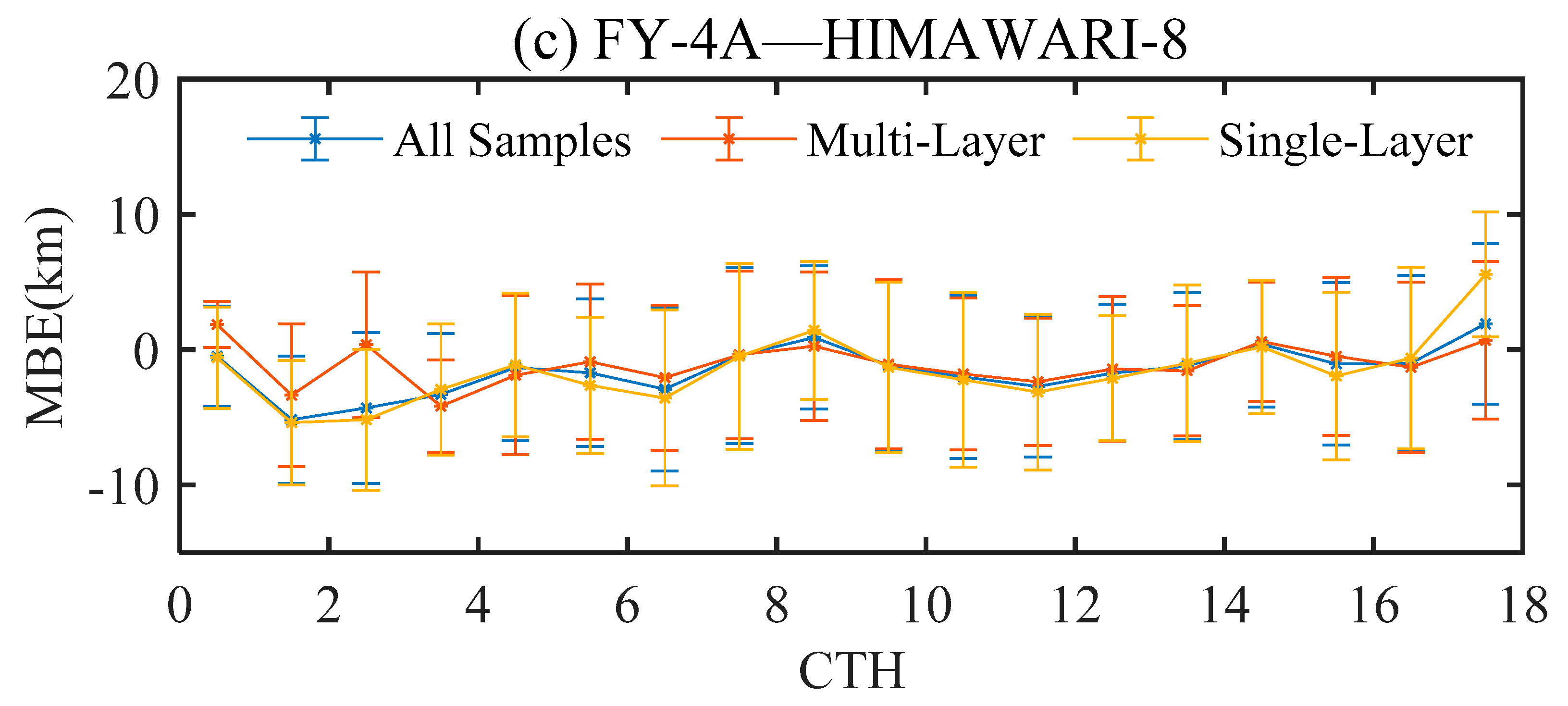
3.1. The Measurement Accuracy of FY-4A and HIMAWARI-8 and the Difference between the Two
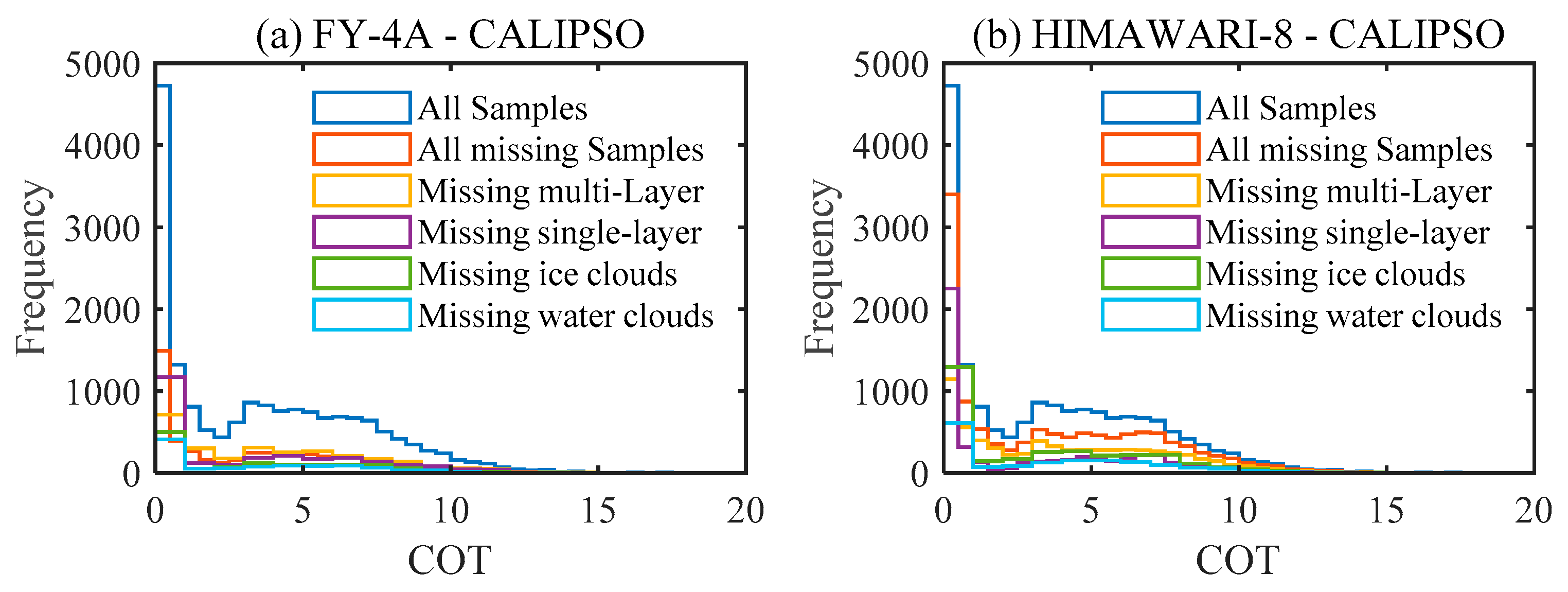
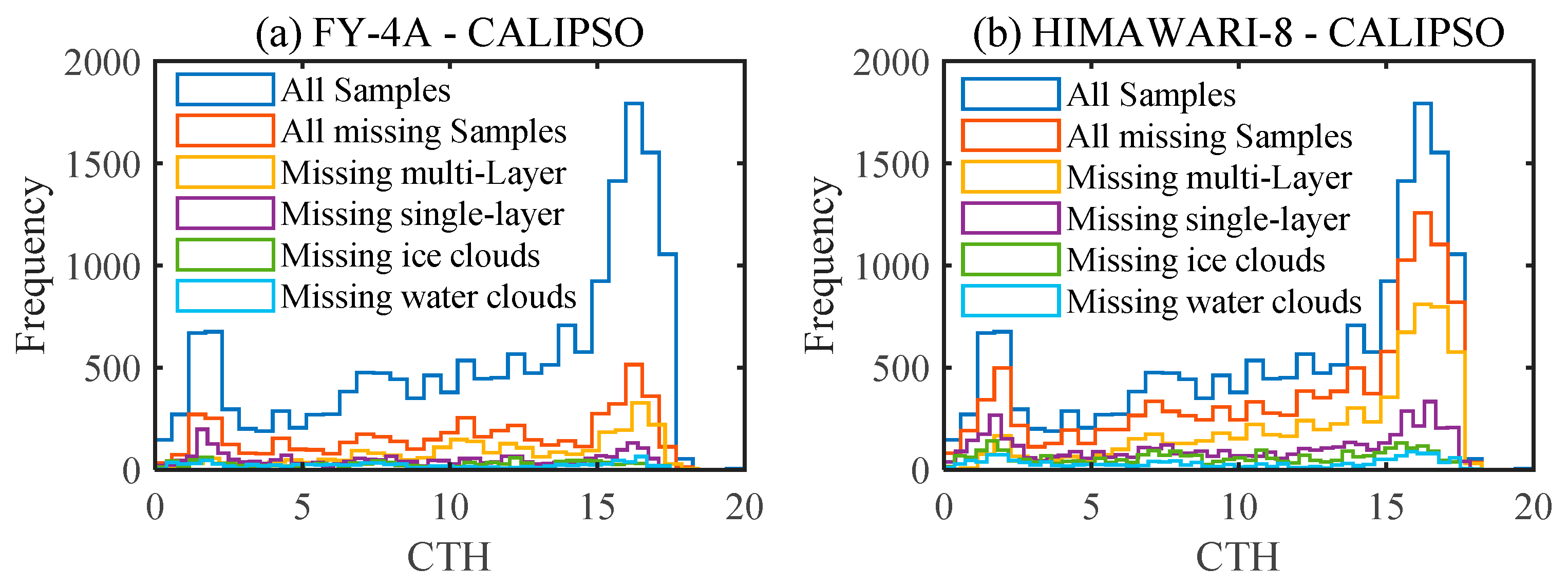
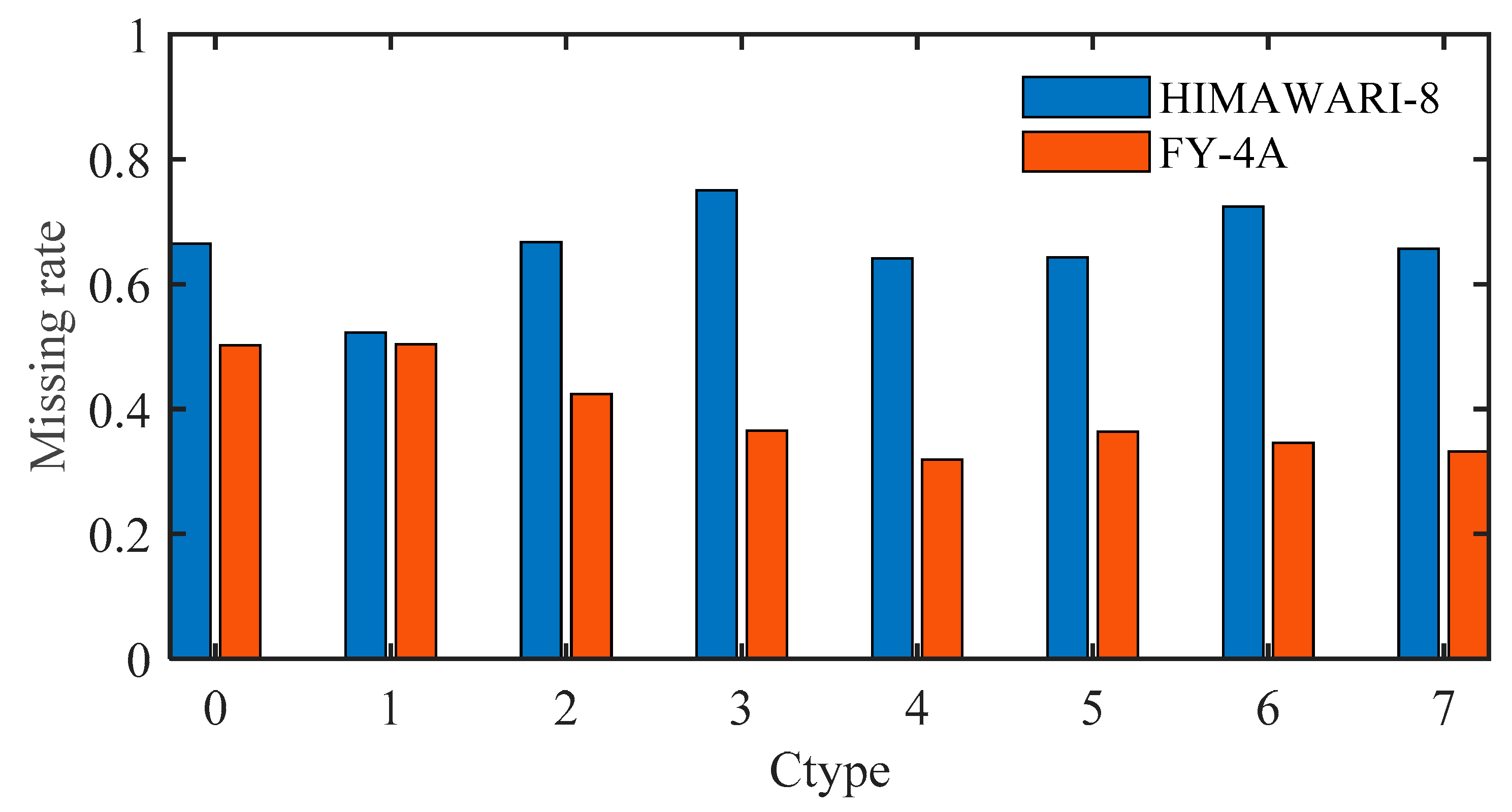
3.2. The Problem of Missing Measurement of FY-4A and HIMAWARI-8
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wetherald, R.T. Cloud Feedback Processes in a General Circulation Model. J. Atmos. 1988, 45, 1397–1416. [Google Scholar] [CrossRef]
- Baker, M.B.; Peter, T. Small-scale cloud processes and climate. Nature 2008, 451, 299–300. [Google Scholar] [CrossRef] [PubMed]
- Trenberth, K.E.; Fasullo, J.T.; Kiehl, J. Earth’s Global Energy Budget. Bull. Am. Meteorol. Soc. 2009, 90, 311–323. [Google Scholar] [CrossRef]
- Dessler, A.E. A Determination of the Cloud Feedback from Climate Variations over the Past Decade. Science 2010, 330, 1523–1527. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Su, W. Evaluating and understanding top of the atmosphere cloud radiative effects in Intergovernmental Panel on Climate Change (IPCC) Fifth Assessment Report (AR5) Coupled Model Intercomparison Project Phase 5 (CMIP5) models using satellite observations. J. Geophys. Res. Atmos. 2013, 118, 683–699. [Google Scholar] [CrossRef] [Green Version]
- Stocker, T.; Plattner, G.K.; Dahe, Q. IPCC Climate Change 2013: The Physical Science Basis—Findings and Lessons Learned. In Proceedings of the Egu General Assembly Conference 2014, Vienna, Austria, 27 April–2 May 2014. [Google Scholar]
- Niemel, S.; Risnen, P.; Savijrvi, H. Comparison of surface radiative flux parameterizations. Atmos. Res. 2001, 58, 141–154. [Google Scholar] [CrossRef]
- Stephens, G.L.; Wild, M.; Stackhouse, P.W., Jr.; L’Ecuyer, T.; Kato, S.; Henderson, D.S. The Global Character of the Flux of Downward Longwave Radiation. J. Clim. 2012, 25, 2329–2340. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Dickinson, R.E. Global atmospheric downward longwave radiation at the surface from ground-based observations, satellite retrievals, and reanalyses. Rev. Geophys. 2013, 51, 150–185. [Google Scholar] [CrossRef]
- Boucher, O.; Randall, D.; Artaxo, P.; Bretherton, C.; Feingold, G.; Forster, P.; Zhang, X.Y. Clouds and Aerosols. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Merino, A.; Soriano, J.F.; Sánchez, J.; López, L.; Frias, M.R. Cloud top height estimation from WRF model: Application to the infrared camera onboard Euso-Balloon (CNES). In Proceedings of the 34th International Cosmic Ray Conference (ICRC2015), The Hague, The Netherlands, 30 July—6 August 2015. [Google Scholar]
- Soriano, J.F.; Peral, L.D.; Ríos, J.A.M.d.L.; Prieto, H.; Frias, M.R. The Spanish Infrared Camera onboard the EUSO-Balloon (CNES) flight on 24 August 2014. In Proceedings of the 34th International Cosmic Ray Conference (ICRC2015), The Hague, The Netherlands, 30 July–6 August 2015. [Google Scholar]
- Danne, O.; Quante, M.; Raschke, E.; Weitkamp, C. Investigations of cloud layer base and top heights from 95 GHz radar reflectivity data. Phys. Chem. Earth Part B Hydrol. Ocean. Atmos. 1999, 24, 167–171. [Google Scholar] [CrossRef]
- Krofli, R.A.; Kelly, R.D. Meteorological research applications of MM-wave radar. Meteorol. Atmos. Phys. 1996, 59, 105–121. [Google Scholar] [CrossRef]
- Hollars, S.; Qiang, F.; Comstock, J.; Ackerman, T. Comparison of cloud-top height retrievals from ground-based 35 GHz MMCR and GMS-5 satellite observations at ARM TWP Manus site. Atmos. Res. 2004, 72, 169–186. [Google Scholar] [CrossRef]
- Platnick, S.; King, M.D.; Ackerman, S.A.; Menzel, W.P.; Baum, B.A.; Riédi, J.C.; Frey, R.A. The MODIS cloud products: Algorithms and examples from Terra. IEEE Trans. Geosci. Remote Sens. 2003, 41, 459–473. [Google Scholar] [CrossRef] [Green Version]
- Minnis, P.; Sun-Mack, S.; Young, D.F.; Heck, P.W.; Garber, D.P.; Chen, Y.; Spangenberg, D.A.; Arduini, R.F.; Trepte, Q.Z.; Smith, W.L.; et al. CERES Edition-2 Cloud Property Retrievals Using TRMM VIRS and Terra and Aqua MODIS Data—Part I: Algorithms. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4374–4400. [Google Scholar] [CrossRef]
- Schmit, T.J.; Gunshor, M.M.; Menzel, W.P.; Gurka, J.J.; Bachmeier, A.S. Introducing the next-generation Advanced Baseline Imager on GOES-R. Bull. Am. Meteorol. Soc. 2005, 86, 8. [Google Scholar] [CrossRef]
- Campbell, J.R.; Dolinar, E.K.; Lolli, S.; Fochesatto, G.J.; Gu, Y.; Lewis, J.R.; Marquis, J.W.; McHardy, T.M.; Ryglicki, D.R.; Welton, E.J. Cirrus Cloud Top-of-the-Atmosphere Net Daytime Forcing in the Alaskan Subarctic from Ground-Based MPLNET Monitoring. J. Appl. Meteorol. Climatol. 2020, 60, 51–63. [Google Scholar] [CrossRef]
- Winker, D.M.; Vaughan, M.A.; Omar, A.; Hu, Y.; Powell, K.A.; Liu, Z.; Hunt, W.H.; Young, S.A. Overview of the CALIPSO Mission and CALIOP Data Processing Algorithms. J. Atmos. Ocean. Technol. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Min, M.; Wang, P.; Campbell, J.R.; Zong, X.; Xia, J. Cirrus Cloud Macrophysical and Optical Properties over North China from CALIOP Measurements. Adv. Atmos. Sci. 2011, 3, 653–664. [Google Scholar] [CrossRef] [Green Version]
- Stephens, G.L.; Vane, D.G.; Boain, R.J.; Mace, G.G.; Sassen, K.; Wang, Z.; Illingworth, A.J.; O’connor, E.J.; Rossow, W.B.; Durden, S.L.; et al. The Cloudsat Mission and The A-Train. Bull. Am. Meteorol. Soc. 2002, 83, 1771–1790. [Google Scholar] [CrossRef] [Green Version]
- Da, C. Preliminary assessment of the Advanced Himawari Imager (AHI) measurement onboard Himawari-8 geostationary satellite. Remote Sens. Lett. 2015, 6, 637–646. [Google Scholar] [CrossRef]
- Liu, Q.; Li, Y.; Yu, M.; Long, S.C.; Yang, C. Daytime Rainy Cloud Detection and Convective Precipitation Delineation Based on a Deep Neural Network Method Using GOES-16 ABI Images. Remote Sens. 2019, 11, 2555. [Google Scholar] [CrossRef] [Green Version]
- Schmetz, J.; Holmlund, K.; Hoffman, J.; Strauss, B.; Mason, B.; Gaertner, V.; Koch, A.; Van De Berg, L. Operational Cloud-Motion Winds from Meteosat Infrared Images. J. Appl. Meteorol. 1993, 32, 1206–1225. [Google Scholar] [CrossRef] [Green Version]
- Smith, W.L. An improved method for calculating tropospheric temperature and moisture profiles from satellite radiometer measurements. Mon. Weather Rev. 2009, 96, 387–396. [Google Scholar] [CrossRef]
- Frey, R.A.; Baum, B.A.; Menzel, W.P.; Ackerman, S.A.; Moeller, C.C.; Spinhirne, J.D. A comparison of cloud top heights computed from airborne lidar and MAS radiance data using CO2 slicing. J. Geophys. Res. Atmos. 1999, 104, D20. [Google Scholar] [CrossRef] [Green Version]
- Min, M.; Wu, C.; Li, C.; Liu, H.; Xu, N.; Wu, X.; Chen, L.; Wang, F.; Sun, F.; Qin, D.; et al. Developing the Science Product Algorithm Testbed for Chinese Next-Generation Geostationary Meteorological Satellites: Fengyun-4 Series. J. Meteorol. Res. 2017, 31, 708–719. [Google Scholar] [CrossRef]
- Iwabuchi, H.; Saito, M.; Tokoro, Y.; Putri, N.S.; Sekiguchi, M. Retrieval of radiative and microphysical properties of clouds from multispectral infrared measurements. Prog. Earth Planet. Sci. 2016, 3, 32. [Google Scholar] [CrossRef] [Green Version]
- Menzel, W.P.; Frey, R.A.; Zhang, H.; Wylie, D.P.; Moeller, C.C.; Holz, R.E.; Maddux, B.; Baum, B.A.; Strabala, K.I.; Gumley, L.E. MODIS Global Cloud-Top Pressure and Amount Estimation: Algorithm Description and Results. J. Appl. Meteorol. Climatol. 2008, 47, 1175–1198. [Google Scholar] [CrossRef] [Green Version]
- Heidinger, A.K.; Pavolonis, M.J. Gazing at Cirrus Clouds for 25 Years through a Split Window. Part I: Methodology. J. Appl. Meteorol. Climatol. 2009, 48, 6. [Google Scholar] [CrossRef]
- Li, J.; Menzel, W.P.; Schreiner, A.J. Variational Retrieval of Cloud Parameters from GOES Sounder Longwave Cloudy Radiance Measurements. J. Appl. Meteorol. 2001, 40, 312–330. [Google Scholar] [CrossRef]
- Iwabuchi, H.; Putri, N.S.; Saito, M.; Tokoro, Y.; Sekiguchi, M.; Yang, P.; Baum, B.A. Cloud Property Retrieval from Multiband Infrared Measurements by Himawari-8. J. Meteorol. Soc. Jpn. Ser. II 2017, 96, 27–42. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Vaughan, M.; Winker, D.; Kittaka, C.; Getzewich, B.; Kuehn, R. The CALIPSO Lidar Cloud and Aerosol Discrimination: Version 2 Algorithm and Initial Assessment of Performance. J. Atmos. Ocean. Technol. 2009, 26, 1198–1213. [Google Scholar] [CrossRef]
- Vaughan, M.A.; Powell, K.A.; Winker, D.M.; Hostetler, C.A.; Kuehn, R.E.; Hunt, W.H.; Getzewich, B.J.; Young, S.A.; Liu, Z.; McGill, M.J. Fully Automated Detection of Cloud and Aerosol Layers in the CALIPSO Lidar Measurements. J. Atmos. Ocean. Technol. 2008, 26, 2034–2050. [Google Scholar] [CrossRef]
- Hu, Y.; Winker, D.; Vaughan, M.; Lin, B.; Omar, A.; Trepte, C.; Kuehn, R. CALIPSO/CALIOP Cloud Phase Discrimination Algorithm. J. Atmos. Ocean. Technol. 2009, 26, 2293–2309. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Central Wavelength (μm) | Bandwidth (FWHM; μm) | |
|---|---|---|
| HIMAWARI-8 | 10.8 | 1.0 |
| 12.0 | 1.0 | |
| 13.5 | 0.6 | |
| FY-4A | 11.2 | 0.67 |
| 12.4 | 0.97 | |
| 13.3 | 0.56 |
| Missing Rate | ||
|---|---|---|
| land | water | |
| FY-4A | 0.33 | 0.29 |
| HIMAWARI-8 | 0.63 | 0.71 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Sun, X.; Wang, X. Reliability Evaluation of the Joint Observation of Cloud Top Height by FY-4A and HIMAWARI-8. Remote Sens. 2021, 13, 3851. https://doi.org/10.3390/rs13193851
Li Q, Sun X, Wang X. Reliability Evaluation of the Joint Observation of Cloud Top Height by FY-4A and HIMAWARI-8. Remote Sensing. 2021; 13(19):3851. https://doi.org/10.3390/rs13193851
Chicago/Turabian StyleLi, Qinghui, Xuejin Sun, and Xiaolei Wang. 2021. "Reliability Evaluation of the Joint Observation of Cloud Top Height by FY-4A and HIMAWARI-8" Remote Sensing 13, no. 19: 3851. https://doi.org/10.3390/rs13193851
APA StyleLi, Q., Sun, X., & Wang, X. (2021). Reliability Evaluation of the Joint Observation of Cloud Top Height by FY-4A and HIMAWARI-8. Remote Sensing, 13(19), 3851. https://doi.org/10.3390/rs13193851