
Feasibility of the Spatiotemporal Fusion Model in Monitoring Ebinur Lake’s Suspended Particulate Matter under the Missing-Data Scenario


 ,
,  ,
,  and
and 
Abstract
:
1. Introduction
2. Study Area and Methods
2.1. Study Area
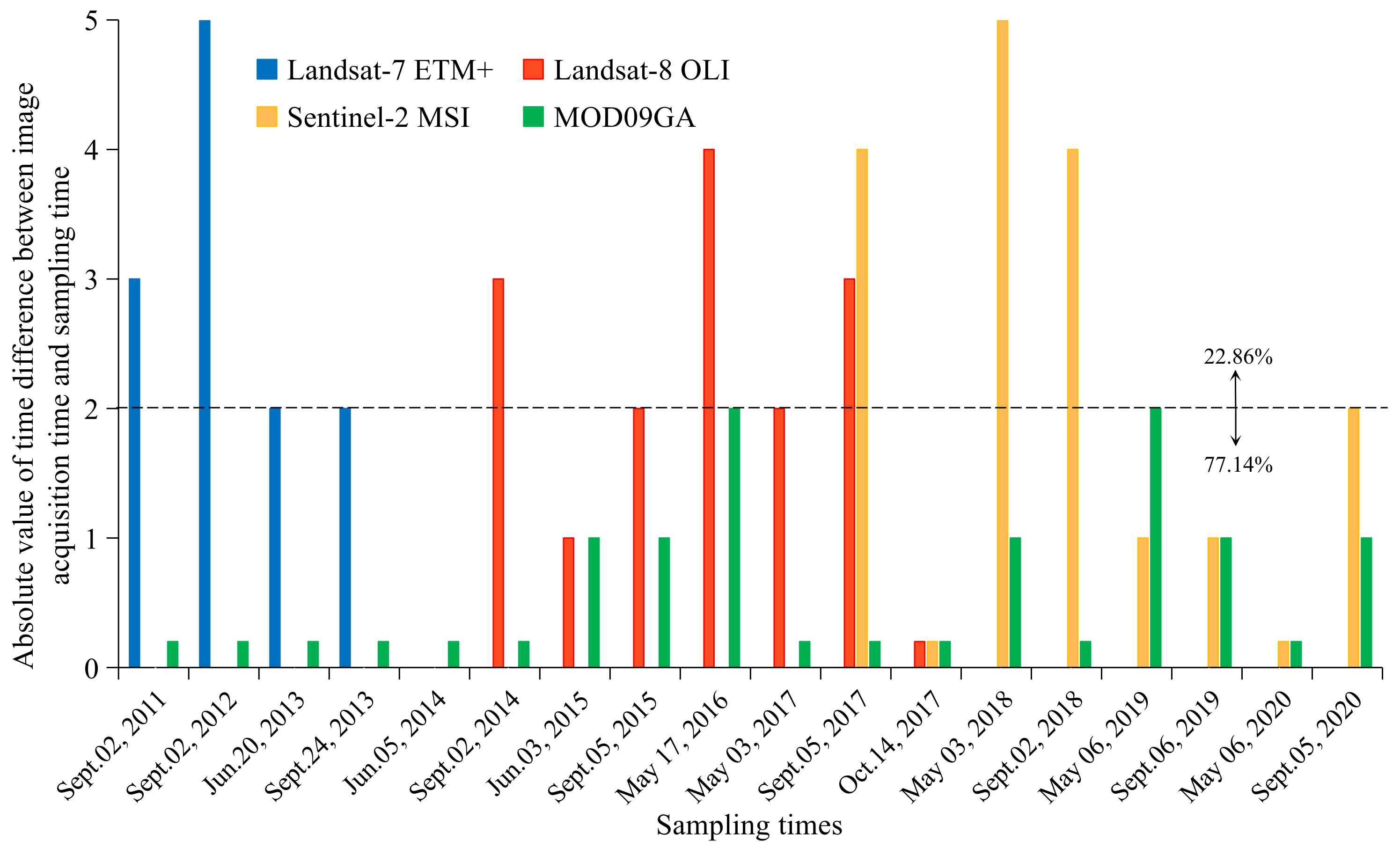
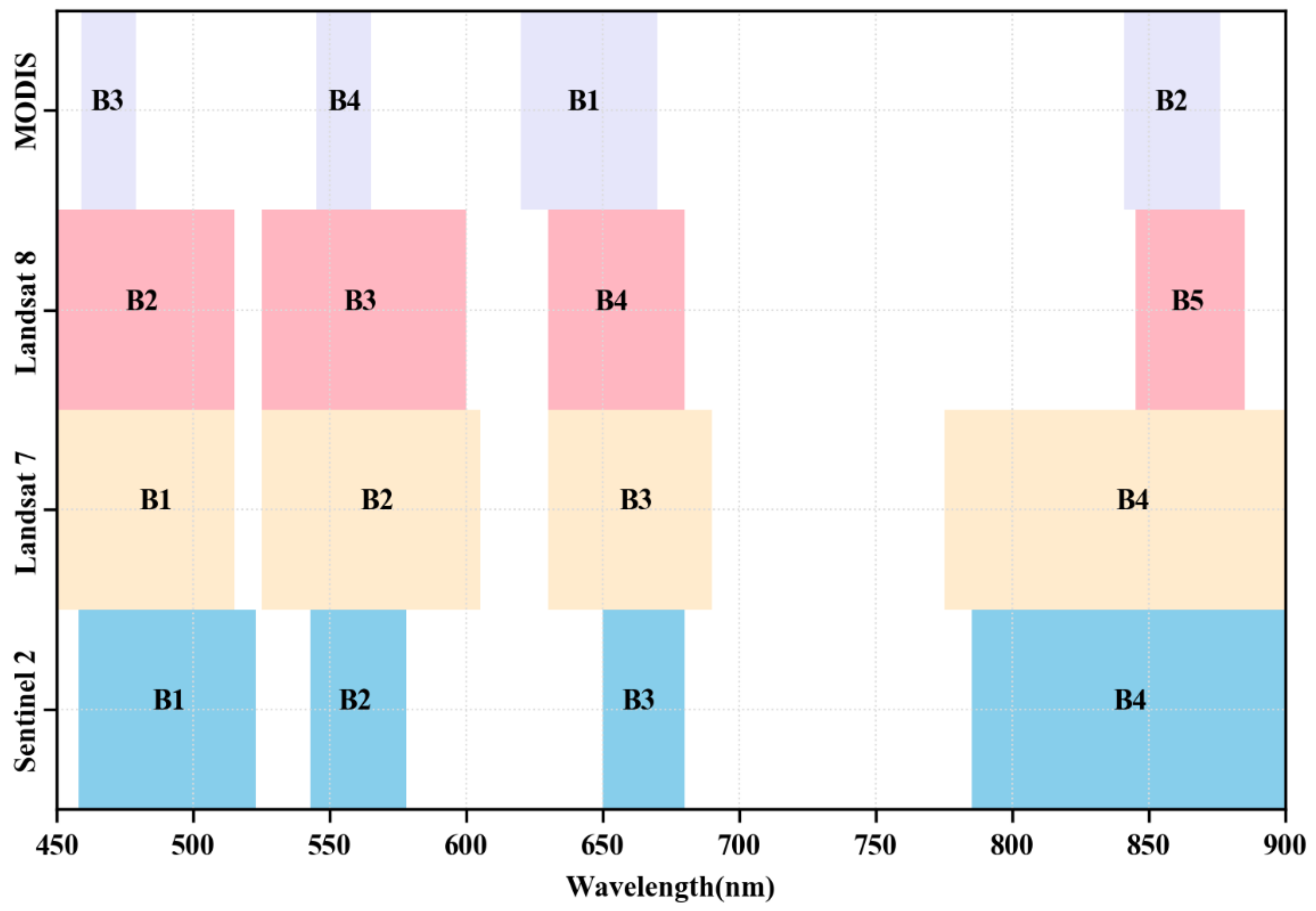
2.2. Data Source and Pre-Processing
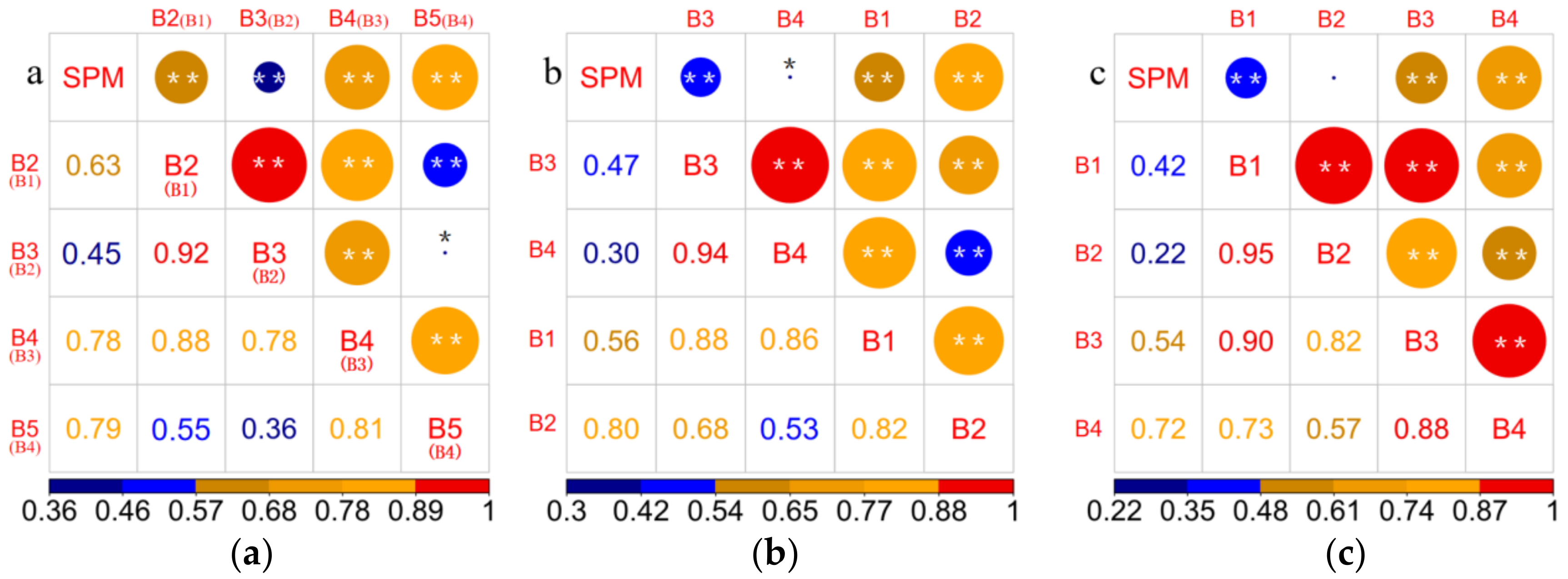
2.3. Sensitive Band Selection
2.4. Spatiotemporal Fusion Model
2.5. Inversion Model for SPM
2.6. Performance Evaluation
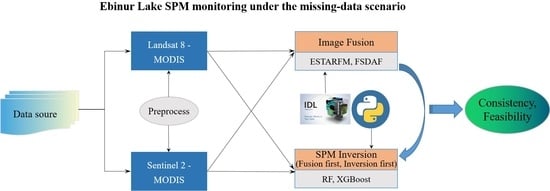
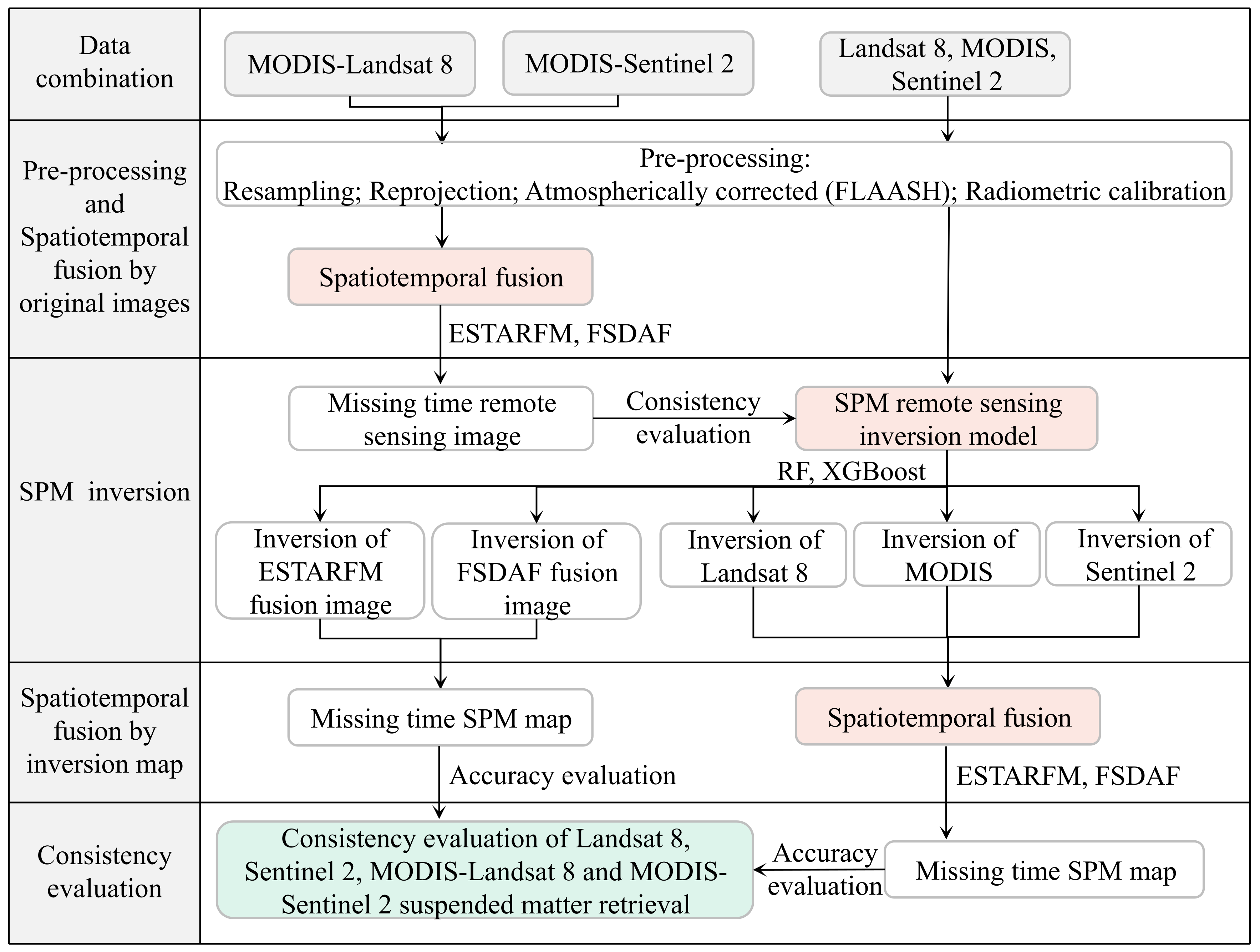
2.7. Workflow
3. Results
3.1. Performance of the Ebinur Lake SPM Inversion Models
3.2. Performance Evaluation of the Two Sensors and Two Spatiotemporal Fusion Approaches
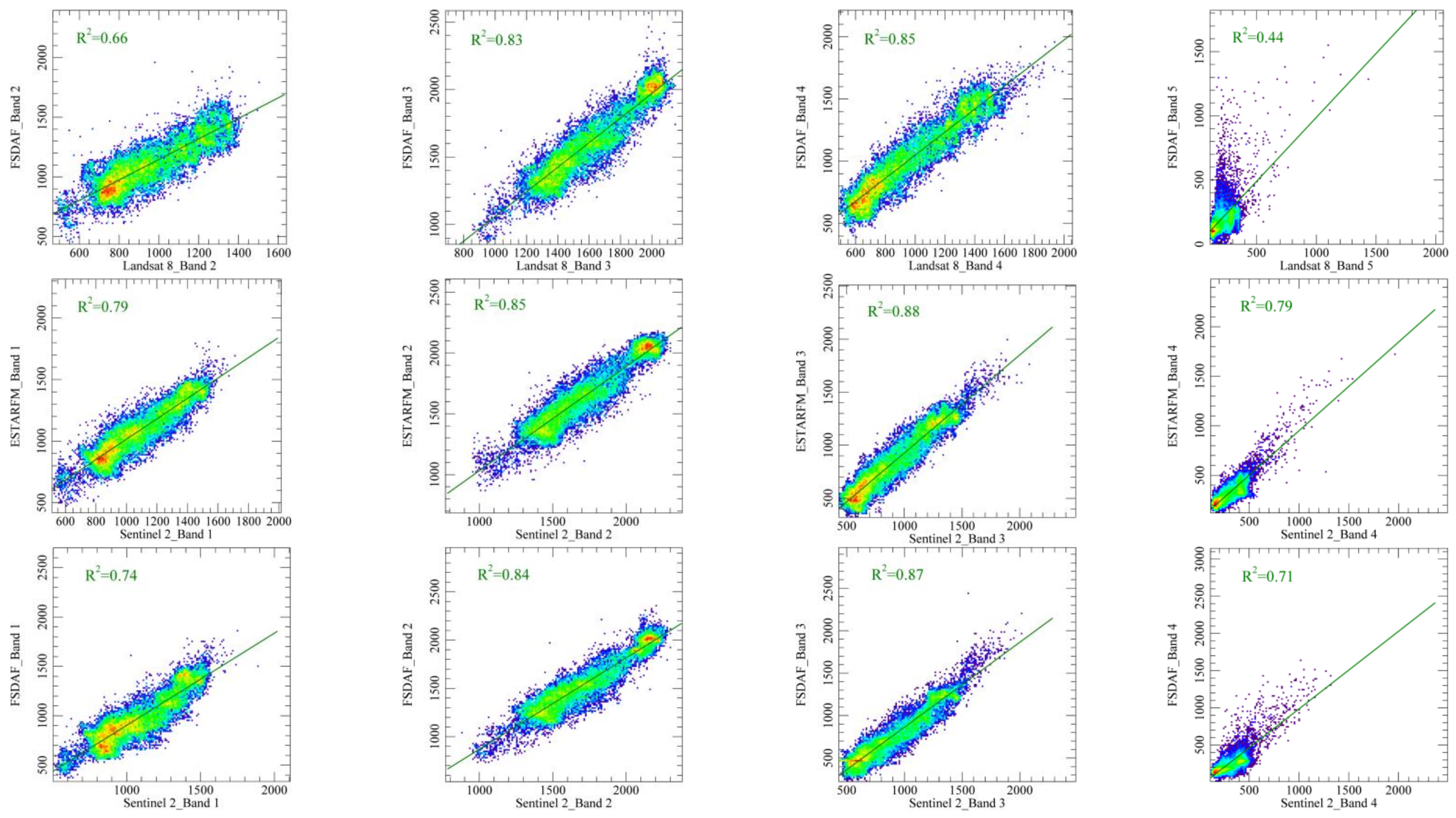
3.3. Consistency Evaluation of Spatiotemporal Fusion Images
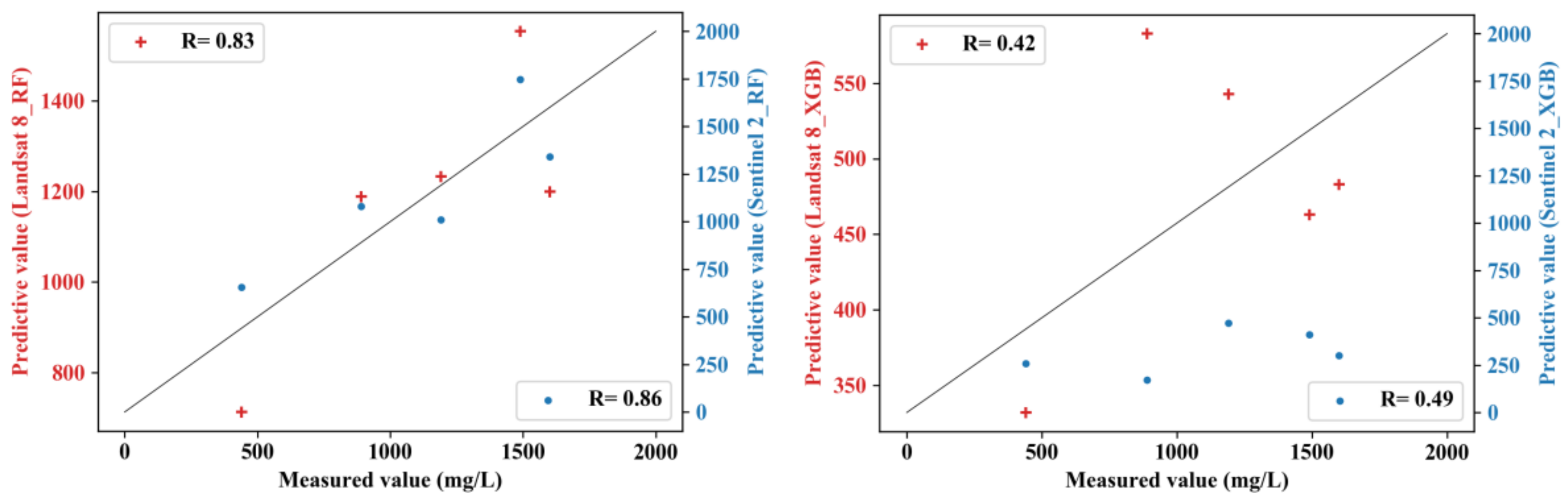
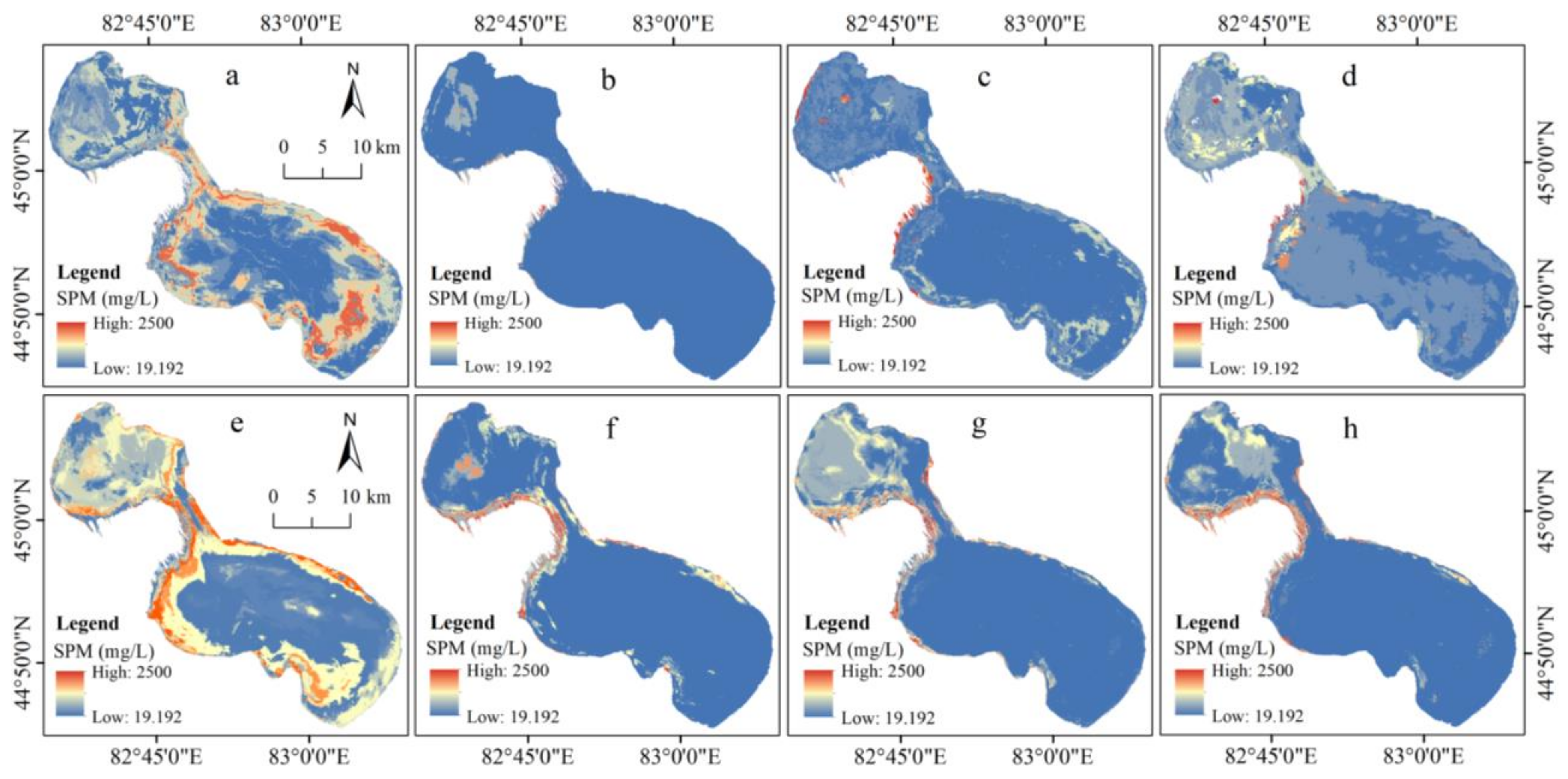
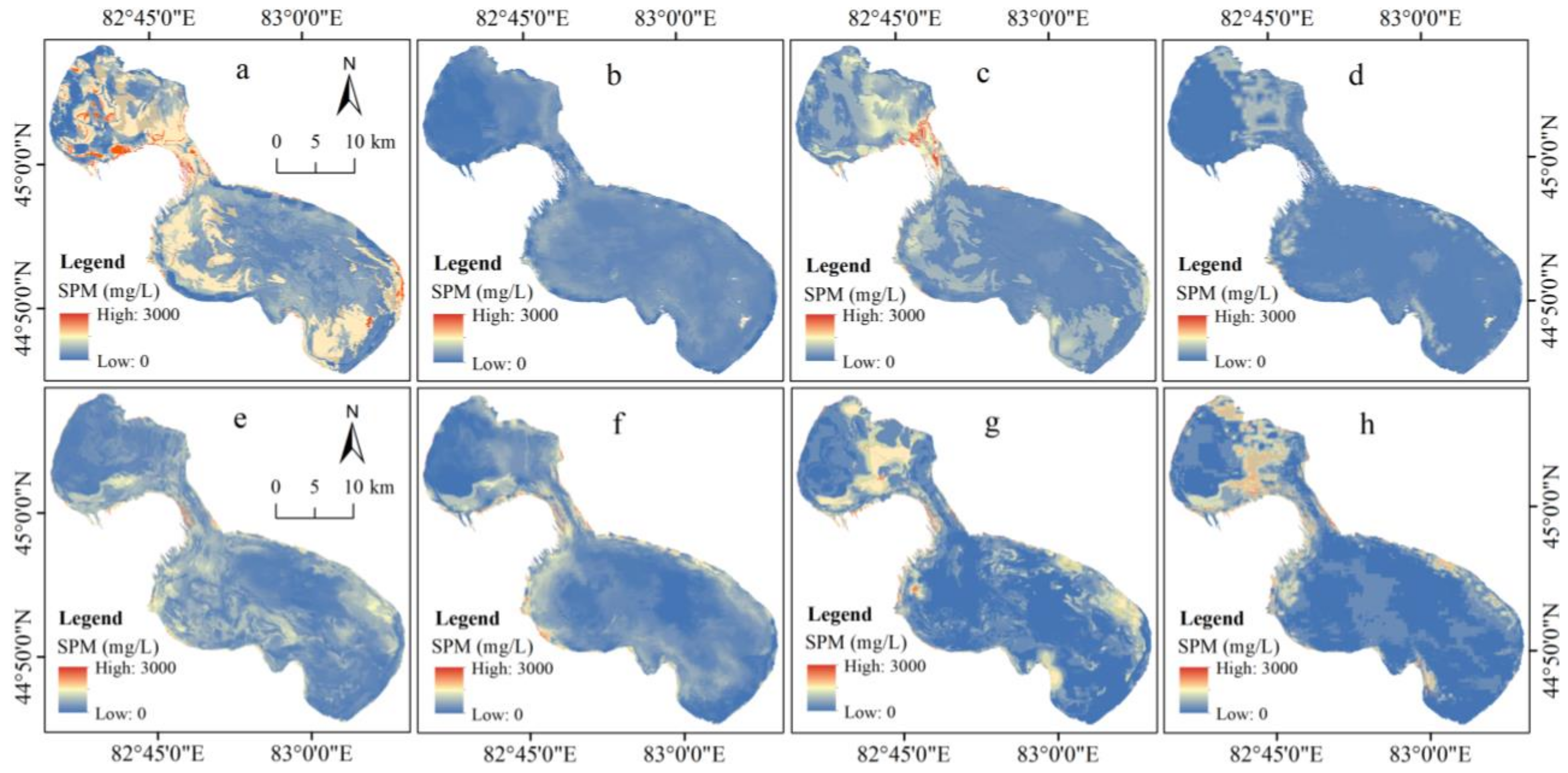
3.4. Retrieval Effect of SPM from the Original Image
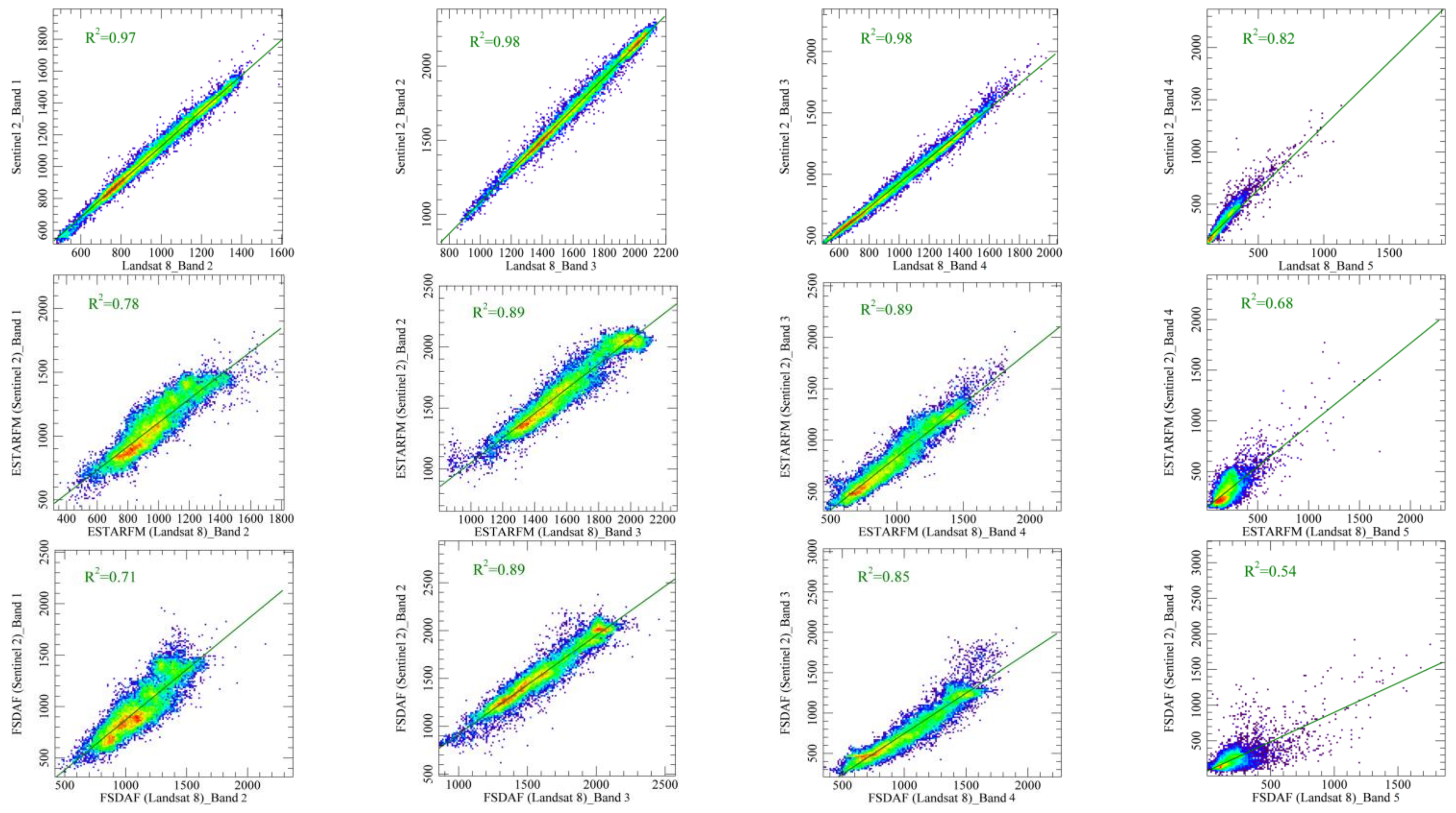
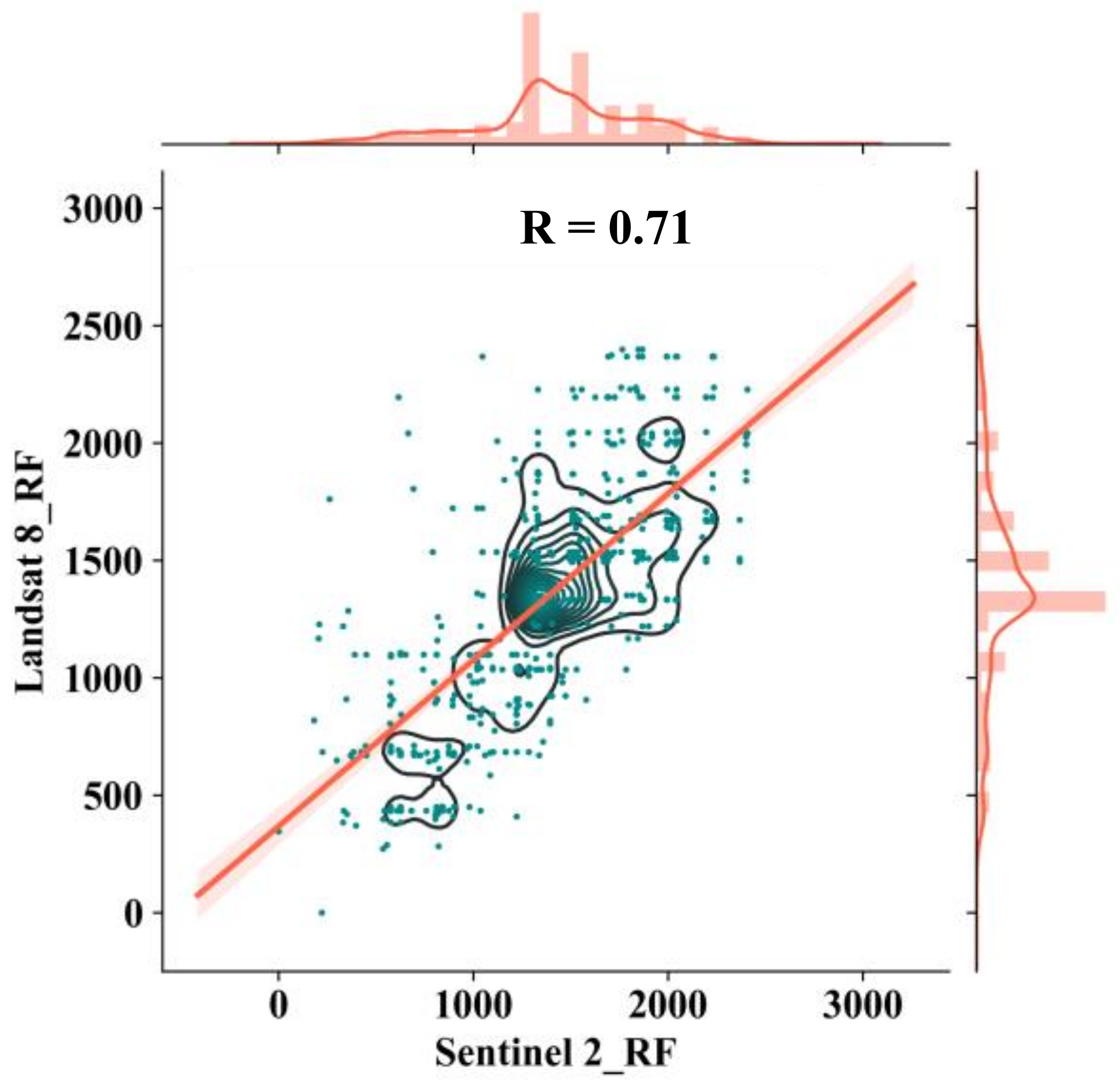
3.5. Consistency Evaluation of SPM Retrieval from Original Images
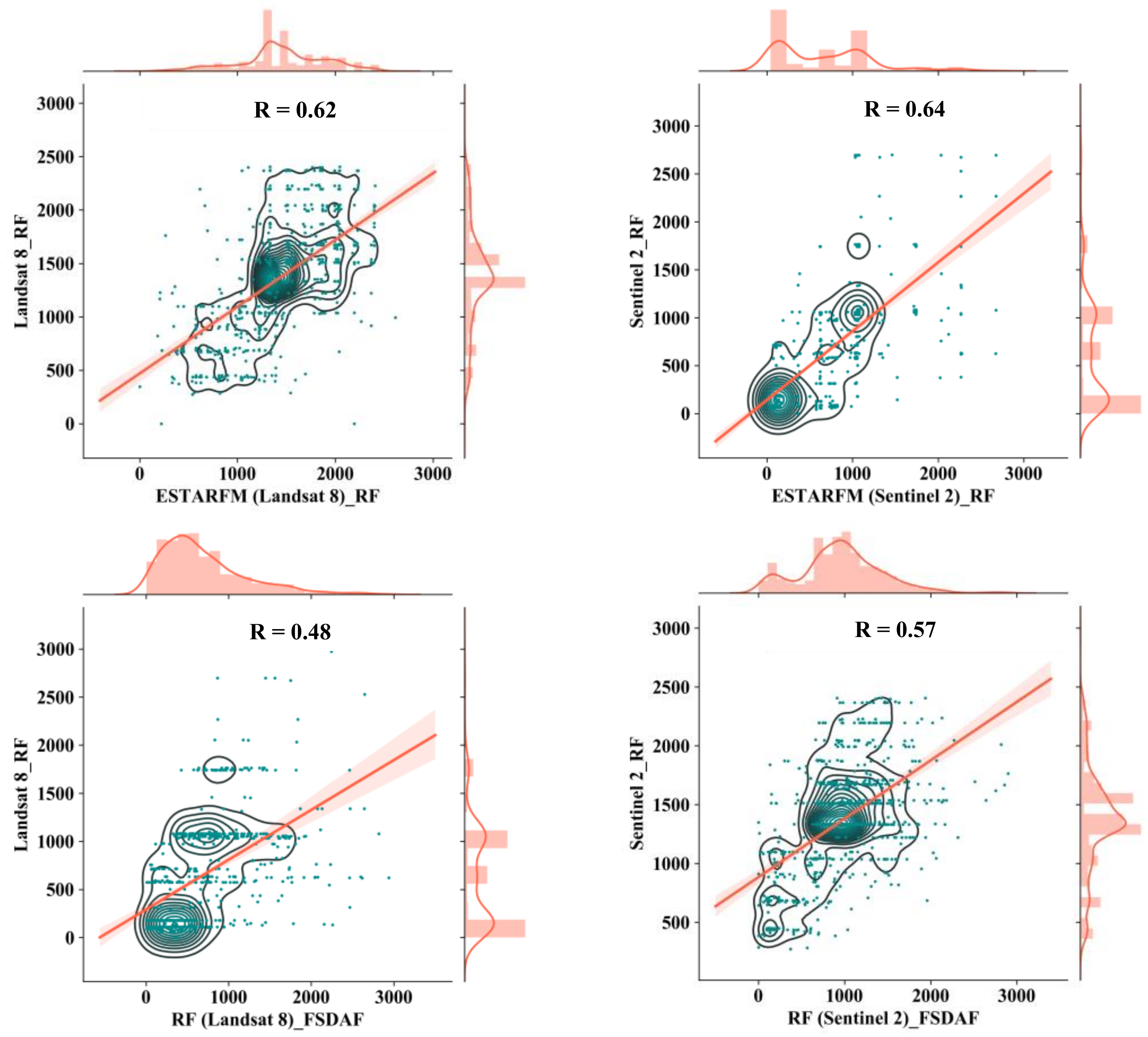
3.6. SPM Inversion of the Fused Images
4. Discussion
5. Conclusions
- 1.
- For spatiotemporal fusion results, ESTARFM is more suitable for the research questions associated with the Ebinur Lake area than FSDAF;
- 2.
- The original and fused images of Landsat 8 and Sentinel 2 have high consistency in the blue, green, red, and NIR bands. The SPM time-series monitoring of Ebinur Lake can be realized using these two kinds of data synthetically;
- 3.
- For Landsat 8 and Sentinel 2 images, the RF inversion model has a higher retrieval accuracy than the XGBoost model, and the consistency of the two data sources is good;
- 4.
- For the fusion images, the inversion accuracy of the “fusion first” strategy is higher, which indicates that the spatiotemporal fusion model is feasible for SPM monitoring in Ebinur Lake.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pahlevan, N.; Chittimalli, S.K.; Balasubramanian, S.V.; Vellucci, V. Sentinel-2/Landsat-8 product consistency and implications for monitoring aquatic systems. Remote Sens. Environ. 2018, 220, 19–29. [Google Scholar] [CrossRef]
- Vörösmarty, C.J.; McIntyre, P.B.; Gessner, M.O.; Dudgeon, D.; Prusevich, A.; Green, P.; Glidden, S.; Bunn, S.E.; Sullivan, C.A.; Liermann, C.R.; et al. Global threats to human water security and river biodiversity. Nature 2010, 467, 555–561. [Google Scholar] [CrossRef]
- Paerl, H.W.; Huisman, J. Climate. Blooms like it hot. Science 2008, 320, 57–58. [Google Scholar] [CrossRef] [Green Version]
- Huisman, J.; Codd, G.A.; Paerl, H.W.; Ibelings, B.W.; Verspagen, J.M.H.; Visser, P.M. Cyanobacterial blooms. Nat. Rev. Microbiol. 2018, 16, 471–483. [Google Scholar] [CrossRef]
- Larson, M.D.; Anita, S.M.; Vincent, R.K.; Evans, J. Multi-depth suspended sediment estimation using high-resolution remote-sensing UAV in Maumee River, Ohio. Int. J. Remote Sens. 2018, 39, 1–18. [Google Scholar] [CrossRef]
- Cohen, S.; Kettner, A.J.; Syvitski, J.P.M. Global suspended sediment and water discharge dynamics between 1960 and 2010: Continental trends and intra-basin sensitivity. Glob. Planet. Chang. 2014, 115, 44–58. [Google Scholar] [CrossRef]
- Volpe, V.; Silvestri, S.; Marani, M. Remote sensing retrieval of suspended sediment concentration in shallow waters. Remote Sens. Environ. 2011, 115, 44–54. [Google Scholar] [CrossRef]
- Xu, B.; Disong, Y.; Burnett, W.C.; Ran, X. Artificial water sediment regulation scheme influences morphology, hydrodynamics and nutrient behavior in the Yellow River estuary. J. Hydrol. 2016, 539, 102–112. [Google Scholar] [CrossRef]
- Wu, X.; Bi, N.; Xu, J.; Nittrouer, J.A.; Yang, Z.; Saito, Y.; Wang, H. Stepwise morphological evolution of the active Yellow River (Huanghe) delta lobe (1976–2013): Dominant roles of riverine discharge and sediment grain size. Geomorphology 2017, 292, 115–127. [Google Scholar] [CrossRef]
- Gao, P.; Wang, Y.; Li, P.; Zhao, G.; Sun, W.; Mu, X. Land degradation changes in the Yellow River Delta and its response to the streamflow-sediment fluxes since 1976. Land Degrad. Dev. 2018, 29, 3212–3220. [Google Scholar] [CrossRef]
- Allison, M.A.; Pratt, T.C. Discharge controls on the sediment and dissolved nutrient transport flux of the lowermost Mississippi River: Implications for export to the ocean and for delta restoration. J. Hydrol. 2017, 555, 1–14. [Google Scholar] [CrossRef]
- Song, K.; Li, L.; Wang, Z.; Liu, D.; Zhang, B.; Xu, J.; Du, J.; Li, L.; Li, S.; Wang, Y. Retrieval of total suspended matter (TSM) and chlorophyll-a (Chl-a) concentration from remote-sensing data for drinking water resources. Environ. Monit. Assess. 2012, 184, 1449. [Google Scholar] [CrossRef]
- Montanher, O.C.; Novo, E.M.L.M.; Barbosa, C.C.F.; Rennóa, C.D.; Silvac, T.S.F. Empirical models for estimating the suspended sediment concentration in Amazonian white water rivers using Landsat/TM. Int. J. Appl. Earth Obs. Geoinf. 2014, 29, 67–77. [Google Scholar] [CrossRef]
- Chen, S.; Han, L.; Chen, X.; Dan, L.; Lin, S.; Yong, L. Estimating wide range Total Suspended Solids concentrations from MODIS 250-m imageries:An improved method. ISPRS J. Photogramm. Remote Sens. 2015, 99, 58–69. [Google Scholar] [CrossRef]
- Matthews, M.W.; Bernard, S.; Winter, K. Remote sensing of cyanobacteria-dominant algal blooms and water quality parameters in Zeekoevlei, a small hypertrophic lake, using MERIS. Remote Sens. Environ. 2010, 114, 2070–2087. [Google Scholar] [CrossRef]
- Alikas, K.; Kratzer, S. Improved retrieval of Secchi depth for optically-complex waters using remote sensing data. Ecol. Indic. 2017, 77, 218–227. [Google Scholar] [CrossRef]
- Gitelson, A.; Szilagyi, F.; Mittenzwey, K.H. Improving quantitative remote sensing for monitoring of inland water quality. Water Res. 1993, 27, 1185–1194. [Google Scholar] [CrossRef]
- Zhang, M.; Dong, Q.; Cui, T.; Xue, C.; Zhang, S. Suspended sediment monitoring and assessment for Yellow River estuary from Landsat TM and ETM+ imagery. Remote Sens. Environ. 2014, 146, 136–147. [Google Scholar] [CrossRef]
- Pirjo, H.; Jaime, R.; Luciano, C.; Ivan, G. Mapping of spatial and temporal variation of water characteristics through satellite remote sensing in Lake Panguipulli. Sci. Total Environ. 2019, 679, 196–208. [Google Scholar]
- Jiang, D.; Matsushita, B.; Pahlevan, N.; Gurlin, D.; Lehmann, M.K.; Fichot, C.G.; Schalles, J.; Loisel, H.; Binding, C.; Zhang, Y.; et al. Remotely estimating total suspended solids concentration in clear to extremely turbid waters using a novel semi-analytical method. Remote Sens. Environ. 2021, 258, 112386. [Google Scholar] [CrossRef]
- Li, P.; Ke, Y.; Bai, J.; Zhang, S.; Chen, M.; Zhou, D. Spatiotemporal dynamics of suspended particulate matter in the Yellow River Estuary, China during the past two decades based on time-series Landsat and Sentinel-2 data. Mar. Pollut. Bulletin. 2019, 149, 110518. [Google Scholar] [CrossRef]
- Li, P.; Ke, Y.; Wang, D.; Ji, H.; Zhou, D. Human impact on suspended particulate matter in the Yellow River Estuary, China: Evidence from remote sensing data fusion using an improved spatiotemporal fusion method. Sci. Total Environ. 2021, 750, 141612. [Google Scholar] [CrossRef]
- Zhu, X.; Leung, K.H.; Li, W.S.; Cheung, L.K. Monitoring interannual dynamics of desertification in Minqin County, China, using dense Landsat time series. Int. J. Digit. Earth. 2019, 13, 1–13. [Google Scholar] [CrossRef]
- Guo, D.; Shi, W.; Hao, M.; Zhu, X. FSDAF 2.0: Improving the performance of retrieving land cover changes and preserving spatial details. Remote Sens. Environ. 2020, 248, 111973. [Google Scholar] [CrossRef]
- Liu, M.; Yang, W.; Zhu, X.; Chen, J.; Chen, X.; Yang, L.; Helmer, E.H. An Improved Flexible Spatiotemporal DAta Fusion (IFSDAF) method for producing high spatiotemporal resolution normalized difference vegetation index time series. Remote Sens. Environ. 2019, 227, 74–89. [Google Scholar] [CrossRef]
- Wang, Q.; Atkinson, P.M. Spatio-temporal fusion for daily Sentinel-2 images. Remote Sens. Environ. 2018, 204, 31–42. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wang, L.; Cheng, Q.; Hai, W.; Gan, W.; Fang, L. Cloud removal in remote sensing images using nonnegative matrix factorization and error correction. ISPRS J. Photogramm. Remote Sens. 2019, 148, 103–113. [Google Scholar] [CrossRef]
- Cheng, S.; Liu, R.; He, Y.; Fan, X.; Luo, Z. Blind image deblurring via hybrid deep priors modeling. Neurocomputing 2020, 387, 334–345. [Google Scholar] [CrossRef]
- Mansaray, A.S.; Dzialowski, A.R.; Martin, M.E.; Wagner, K.L.; Gholizadeh, H.; Stoodley, S.H. Comparing PlanetScope to Landsat-8 and Sentinel-2 for Sensing Water Quality in Reservoirs in Agricultural Watersheds. Remote Sens. 2021, 13, 1847. [Google Scholar] [CrossRef]
- Planet, Planet Imagery Product Specifications. Available online: https://assets.planet.com/docs/Planet_Combined_Imagery_Product_Specs_letter_screen.pdf (accessed on 26 August 2021).
- Poursanidis, D.; Traganos, D.; Chrysoulakis, N.; Reinartz, P. Cubesats allow high spatiotemporal estimates of satellite-derived bathymetry. Remote Sens. 2019, 11, 1299. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Zhou, J.; Chen, J.; Chen, X. Spatiotemporal fusion method to simultaneously generate full-length normalized difference vegetation index time series (SSFIT). Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102333. [Google Scholar] [CrossRef]
- Zhu, X.; Cai, F.; Tian, J.; Williams, T. Spatiotemporal Fusion of Multisource Remote Sensing Data: Literature Survey, Taxonomy, Principles, Applications, and Future Directions. Remote Sens. 2018, 10, 527. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Chen, J.; Chen, X.; Zhu, X.; Qiu, Y.; Song, H.; Rao, Y.; Zhang, C.; Cao, X.; Cui, X. Sensitivity of six typical spatiotemporal fusion methods to different influential factors: A comparative study for a normalized difference vegetation index time series reconstruction. Remote Sens. Environ. 2021, 252, 112130. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Zhu, X.; Helmer, E.H.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M.A. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Sagan, V.; Peterson, K.T.; Maimaitijiang, M.; Sidike, P.; Sloan, J.; Greeling, B.A.; Maalouf, S.; Adams, C. Monitoring inland water quality using remote sensing: Potential and limitations of spectral indices, bio-optical simulations, machine learning, and cloud computing. Earth Sci. Rev. 2020, 205, 103187. [Google Scholar] [CrossRef]
- Du, Y.; Song, K.; Liu, G.; Wen, Z.; Fang, C.; Shang, Y.; Zhao, F.; Wang, Q.; Du, J.; Zhang, B. Quantifying total suspended matter (TSM) in waters using Landsat images during 1984-2018 across the Songnen Plain, Northeast China. J. Environ. Manag. 2020, 262, 110334. [Google Scholar] [CrossRef]
- Ford, R.T.; Vodacek, A. Determining improvements in Landsat spectral sampling for inland water quality monitoring. Sci. Remote Sens. 2020, 1, 100005. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gao, B.; Li, R.; Berdnikov, S.; Saprygin, V. Estimation of chlorophyll-a concentration in productive turbid waters using a Hyperspectral Imager for the Coastal Ocean—the Azov Sea case study. Environ. Res. Lett. 2011, 6, 24023–24026. [Google Scholar] [CrossRef]
- Palmer, S.; Kutser, T.; Hunter, P.D. Remote sensing of inland waters: Challenges, progress and future directions. Remote Sens. Environ. 2014, 157, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Le, C.; Li, Y.; Zha, Y.; Sun, D.; Yin, B. Validation of a Quasi-Analytical Algorithm for Highly Turbid Eutrophic Water of Meiliang Bay in Taihu Lake, China. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2492–2500. [Google Scholar]
- Flink, P.; Lindell, L.T.; Östlund, C. Statistical analysis of hyperspectral data from two Swedish lakes. Sci. Total. Environ. 2001, 268, 155–169. [Google Scholar] [CrossRef]
- Peterson, K.T.; Sagan, V.; Sidike, P.; Hasenmueller, E.A.; Sloan, J.J.; Knouft, J.H. Machine Learning-Based Ensemble Prediction of Water-quality Variables Using Feature-level and Decision-level Fusion with Proximal Remote Sensing. Photogramm. Eng. Remote Sens. 2019, 85, 269–280. [Google Scholar] [CrossRef]
- Kiangala, S.K.; Wang, Z.H. An effective adaptive customization framework for small manufacturing plants using extreme gradient boosting-XGBoost and random forest ensemble learning algorithms in an Industry 4.0 environment. Mach. Learn. Appl. 2021, 4, 100024. [Google Scholar]
- Chen, L.; Tan, C.; Kao, S.; Wang, T. Improvement of remote monitoring on water quality in a subtropical reservoir by incorporating grammatical evolution with parallel genetic algorithms into satellite imagery. Water Res. 2008, 42, 296–306. [Google Scholar] [CrossRef]
- Peterson, K.T.; Sagan, V.; Sloan, J.J. Deep learning-based water quality estimation and anomaly detection using Landsat-8/Sentinel-2 virtual constellation and cloud computing. GISci. Remote Sens. 2020, 57, 510–525. [Google Scholar] [CrossRef]
- Fang, C. Bole-Taipei Line: The important function and basic conception as a line for regional balanced development. Acta Geogr. Sin. 2020, 75, 211–225. (In Chinese) [Google Scholar]
- Deng, M.; Long, A.; Li, J.; Deng, X.; Zheng, P. Theoretical analysis of “natural-social-trading” ternary water cycle mode in the inland river basin of Northwest China. Acta Geogr. Sin. 2020, 75, 1333–1345. (In Chinese) [Google Scholar]
- Yang, Q.; He, Q.; Li, H.; Lei, J. Study on the Sand-Dust Climate Change Trend and Jump in Ebinur Lake Area. J. Desert Res. 2003, 5, 27–32. (In Chinese) [Google Scholar]
- Liu, D.; Abuduwaili, J.; Lei, J.; Wu, G. Deposition Rate and Chemical Composition of the Aeolian Dust from a Bare Saline Playa, Ebinur Lake, Xinjiang, China. Water Air Soil Pollut. 2011, 218, 175–184. [Google Scholar] [CrossRef]
- Abuduwaili, J.; Gabchenko, M.V.; Xu, J. Eolian transport of salts—A case study in the area of Lake Ebinur (Xinjiang, Northwest China). J. Arid Environ. 2008, 72, 1843–1852. [Google Scholar] [CrossRef]
- Zhao, C.S.; Yang, S.T.; Sun, Y.; Zhang, H.; Sun, C.; Xu, T.; Lim, R.P.; Mitrovic, S.M. Estimating River Accommodation Capacity for Organic Pollutants in Data-scarce Areas. J. Hydrol. 2018, 564, 442–451. [Google Scholar] [CrossRef]
- Wang, Q.; Bayinchahan; Ma, D.D.; Zeng, Q.; Jiang, F.; Wang, Y.; Hu, R. Analysis on Causes of the Water Level Variation of Ebinur Lake in Recent 50 Years. J. Glaciol. Geocryol. 2003, 2, 224–228. (In Chinese) [Google Scholar]
- Yao, Z.; Xiao, J.; Jiang, F. Characteristics of daily extreme-wind gusts along the Lanxin Railway in Xinjiang, China. Aeolian Res. 2012, 6, 31–40. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, F.; Johnson, V.C.; Duan, D.; Kung, H.T. Spatio-temporal variation of oasis landscape pattern in arid area: Human or natural driving? Ecol. Indic. 2021, 125, 107495. [Google Scholar] [CrossRef]
- Abuduwaili, J.; Liu, D.; Guangyang, W.U. Saline dust storms and their ecological impacts in arid regions. J. Arid Land. 2010, 2, 144–150. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Li, Z.; Wang, F.; Li, H.; Wang, P. Glacier changes from 1964 to 2004 in the Jinghe River basin, Tien Shan. Cold Reg. Sci. Technol. 2014, 102, 78–83. [Google Scholar] [CrossRef]
- Lu, D.; Li, J.; Filippi, A. Analysis of total suspended solids concentration in water bodies of East Lake based on long time series Landsat imagery. Eng. J. Wuhan Univ. 2019, 52, 854–861. (In Chinese) [Google Scholar]
- Qing, S.; Cui, T.; Lai, Q.; Bao, Y.; Diao, R.; Yue, Y.; Hao, Y. Improving remote sensing retrieval of water clarity in complex coastal and inland waters with modified absorption estimation and optical water classification using Sentinel-2 MSI. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102377. [Google Scholar] [CrossRef]
- Xu, H.; Xu, G.; Wen, X.; Hu, X.; Wang, Y. Lockdown effects on total suspended solids concentrations in the Lower Min River (China) during COVID-19 using time-series remote sensing images. Int. J. Appl. Earth Obs. Geoinf. 2021, 98, 102301. [Google Scholar] [CrossRef]
- Heimhuber, V.; Tulbure, M.G.; Broich, M. Addressing spatio-temporal resolution constraints in Landsat and MODIS-based mapping of large-scale floodplain inundation dynamics. Remote Sens. Environ. 2018, 211, 307–320. [Google Scholar] [CrossRef]
- Zhang, Y.; Yao, X.; Wu, Q.; Huang, Y.; Zhou, Z.; Yang, J.; Liu, X. Turbidity prediction of lake-type raw water using random forest model based on meteorological data: A case study of Tai lake, China. J. Environ. Manag. 2021, 290, 112657. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and Regression by Randomforest. R News 2002, 2, 18–22. [Google Scholar]
- Lu, H.; Ma, X. Hybrid decision tree-based machine learning models for short-term water quality prediction. Chemosphere 2020, 249, 126169. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Luo, F. Risk prediction and early warning for air traffic controllers unsafe acts using association rule mining and random forest. Saf. Sci. 2021, 135, 105125. [Google Scholar] [CrossRef]
- Wang, C.; Deng, C.; Wang, S. Imbalance-XGBoost: Leveraging weighted and focal losses for binary label-imbalanced classification with XGBoost. Pattern Recognit. Lett. 2020, 136, 190–197. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting system. In Proceedings of the 22Nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Yue, L.; Yi, Z.; Pan, J.; Li, X.; Li, J. Identify M Subdwarfs from M-type Spectra using XGBoost. Optik 2021, 225, 165535. [Google Scholar] [CrossRef]
- Chhetri, R.P.; Elrahman, A.A. De-striping hyperspectral imagery using wavelet transform and adaptive frequency domain filtering. ISPRS J. Photogramm. Remote Sens. 2011, 66, 620–636. [Google Scholar] [CrossRef]
- Zhou, W.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar]
- Doña, C.; Chang, N.; Caselles, V.; Sanchez, J.M.; Camacho, A.; Delegido, J.; Vannah, B.W. Integrated satellite data fusion and mining for monitoring lake water quality status of the Albufera de Valencia in Spain. J. Environ. Manag. 2015, 151, 416–426. [Google Scholar] [CrossRef] [Green Version]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L.; Gege, P. Physics-based Bathymetry and Water Quality Retrieval Using PlanetScope Imagery: Impacts of 2020 COVID-19 Lockdown and 2019 Extreme Flood in the Venice Lagoon. Remote Sens. 2020, 12, 2381. [Google Scholar] [CrossRef]
- Feng, L.; Hou, X.; Zheng, Y. Monitoring and understanding the water transparency changes of fifty large lakes on the Yangtze Plain based on long-term MODIS observations. Remote Sens. Environ. 2019, 221, 675–686. [Google Scholar] [CrossRef]
- Chawla, I.; Karthikeyan, L.; Mishra, A.K. A review of remote sensing applications for water security: Quantity, quality, and extremes. J. Hydrol. 2020, 585, 124826. [Google Scholar] [CrossRef]
- Dekker, A.G.; Vos, R.J.; Peters, S. Comparison of remote sensing data, model results and in situ data for total suspended matter (TSM) in the southern Frisian lakes. Sci. Total Environ. 2001, 268, 197–214. [Google Scholar] [CrossRef]
- Li, J.; Huang, C.; Zha, Y.; Wang, C.; Shang, N.; HAO, W. Spatial Variation Characteristics and Remote Sensing Retrieval of Total Suspended Matter in Surface Water of the Yangtze River. Environ. Sci. 2021, 268, 1–13. (In Chinese) [Google Scholar] [CrossRef]
- Xue, K.; Ma, R.; Duan, H.; Shen, M.; Boss, E.; Cao, Z. Inversion of inherent optical properties in optically complex waters using sentinel-3A/OLCI images: A case study using China’s three largest freshwater lakes. Remote Sens. Environ. 2019, 225, 328–346. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. Water Quality Retrieval from PRISMA Hyperspectral Images: First Experience in a Turbid Lake and Comparison with Sentinel-2. Remote Sens. 2020, 12, 3984. [Google Scholar] [CrossRef]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G. A physics based retrieval and quality assessment of bathymetry from suboptimal hyperspectral dat. Remote Sens. Environ. 2009, 113, 755–770. [Google Scholar] [CrossRef]
- Ritchie, J.C.; Zimba, P.V.; Everitt, J.H. Remote Sensing Techniques to Assess Water Quality. Photogramm. Eng. Remote Sens. 2003, 69, 695–704. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Jia, K.; Wei, X.; Xia, M.; Yao, Y.; Zhang, X.; Liu, D.; Tao, G. Generating spatiotemporally consistent fractional vegetation cover at different scales using spatiotemporal fusion and multiresolution tree methods. ISPRS J. Photogramm. Remote Sens. 2020, 167, 214–229. [Google Scholar] [CrossRef]
- Doxaran, D.; Froidefond, J.M.; Lavender, S.; Castaing, P. Spectral signature of highly turbid waters: Application with SPOT data to quantify suspended particulate matter concentrations. Remote Sens. Environ. 2002, 81, 149–161. [Google Scholar] [CrossRef]
- Wang, D.; Yu, T.; Liu, Y.; Gu, X.; Mi, X.; Shi, S.; Ma, M.; Chen, X.; Zhang, Y.; Liu, Q.; et al. Estimating Daily Actual Evapotranspiration at a Landsat-Like Scale Utilizing Simulated and Remote Sensing Surface Temperature. Remote Sens. 2021, 13, 225. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source 1 | Data Source 2 | Spatiotemporal Resolution Model | Image for Predicting Time | ||
|---|---|---|---|---|---|
| MODIS | Landsat 8 | MODIS | Sentinel-2 | ||
| 2017/5/8 | 2017/5/8 | 2017/7/19 | 2017/7/19 | ESTARFM, FSDAF (Near time image pairs) | 2017/08/29 |
| 2017/8/29 | - | 2017/8/29 | - | ||
| 2017/10/14 | 2017/10/15 | 2017/9/17 | 2017/9/17 | ||
| XGBoost | RF | |||||
|---|---|---|---|---|---|---|
| Data Source | Parameter | Value | Performance | Parameter | Value | Performance |
| Landsat 7/8 | n_estimators | 4 | R2 = 0.80, RMSE = 1.73 g/L, RPD = 2.25 | n_estimators | 12 | R2 = 0.78, RMSE = 1.82 g/L, RPD = 2.13 |
| learning_rate | 0.4 | random_state | 64 | |||
| max_depth | 2 | 0 | / | |||
| MODIS | n_estimators | 4 | R2 = 0.86, RMSE = 0.88 g/L, RPD = 2.63 | n_estimators | 8 | R2 = 0.86, RMSE = 0.86 g/L, RPD = 2.69 |
| learning_rate | 0.5 | random_state | 64 | |||
| max_depth | 3 | / | / | |||
| Sentinel 2 | n_estimators | 50 | R2 = 0.82, RMSE = 1.17 g/L, RPD = 2.37 | n_estimators | 6 | R2 = 0.81, RMSE = 1.19 g/L, RPD = 2.33 |
| learning_rate | 0.2 | random_state | 58 | |||
| max_depth | 2 | / | / | |||
| Data Types | Bands | R2 | NRMSE | PSNR | SSIM | ||||
|---|---|---|---|---|---|---|---|---|---|
| ESTARFM | FSDAF | ESTARFM | FSDAF | ESTARFM | FSDAF | ESTARFM | FSDAF | ||
| ML8 | Blue | 0.70 | 0.66 | 0.13 | 0.21 | 48.43 | 44.07 | 0.62 | 0.53 |
| Green | 0.82 | 0.83 | 0.07 | 0.07 | 48.60 | 48.59 | 0.70 | 0.69 | |
| Red | 0.85 | 0.85 | 0.12 | 0.13 | 48.36 | 47.74 | 0.75 | 0.71 | |
| NIR | 0.69 | 0.44 | 0.42 | 0.60 | 49.68 | 46.44 | 0.58 | 0.42 | |
| MS2 | Blue | 0.79 | 0.74 | 0.10 | 0.15 | 49.35 | 45.66 | 0.64 | 0.58 |
| Green | 0.85 | 0.84 | 0.08 | 0.12 | 47.38 | 43.79 | 0.72 | 0.71 | |
| Red | 0.88 | 0.87 | 0.13 | 0.19 | 48.08 | 44.94 | 0.76 | 0.73 | |
| NIR | 0.79 | 0.71 | 0.26 | 0.38 | 51.07 | 47.79 | 0.67 | 0.63 | |
| Data Type | R2 | RMSE (mg/L) | MAE |
|---|---|---|---|
| Landsat 8_RF | 0.68 | 256.92 | 215.88 |
| Sentinel 2_RF | 0.73 | 222.69 | 220.27 |
| Landsat 8_XGBoost | 0.18 | 751.90 | 641.20 |
| Sentinel 2_XGBoost | 0.24 | 884.85 | 798.85 |
| Data Type | R2 | NRMSE | SSIM | PSNR (dB) |
|---|---|---|---|---|
| Landsat 8_RF-Sentinel 2_RF | 0.51 | 0.67 | 0.49 | 28.34 |
| Landsat 8_XGBoost-Sentinel 2_XGBoost | 0.13 | 0.88 | 0.21 | 13.07 |
| Strategy | Optimal Combination | R2 | NRMSE | SSIM | PSNR(dB) |
|---|---|---|---|---|---|
| Fusion first | ESTARFM (Landsat 8)_RF—Landsat 8_RF | 0.38 | 0.75 | 0.39 | 26.36 |
| ESTARFM (Sentinel 2)_RF—Sentinel 2_RF | 0.41 | 0.72 | 0.43 | 23.24 | |
| Inversion first | FSDAF (Landsat 8)_RF—Landsat 8_RF | 0.23 | 0.81 | 0.33 | 18.45 |
| FSDAF (Sentinel 2)_RF—Sentinel 2_RF | 0.32 | 0.77 | 0.36 | 21.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Duan, P.; Zhang, F.; Jim, C.-Y.; Tan, M.L.; Chan, N.W. Feasibility of the Spatiotemporal Fusion Model in Monitoring Ebinur Lake’s Suspended Particulate Matter under the Missing-Data Scenario. Remote Sens. 2021, 13, 3952. https://doi.org/10.3390/rs13193952
Liu C, Duan P, Zhang F, Jim C-Y, Tan ML, Chan NW. Feasibility of the Spatiotemporal Fusion Model in Monitoring Ebinur Lake’s Suspended Particulate Matter under the Missing-Data Scenario. Remote Sensing. 2021; 13(19):3952. https://doi.org/10.3390/rs13193952
Chicago/Turabian StyleLiu, Changjiang, Pan Duan, Fei Zhang, Chi-Yung Jim, Mou Leong Tan, and Ngai Weng Chan. 2021. "Feasibility of the Spatiotemporal Fusion Model in Monitoring Ebinur Lake’s Suspended Particulate Matter under the Missing-Data Scenario" Remote Sensing 13, no. 19: 3952. https://doi.org/10.3390/rs13193952
APA StyleLiu, C., Duan, P., Zhang, F., Jim, C.-Y., Tan, M. L., & Chan, N. W. (2021). Feasibility of the Spatiotemporal Fusion Model in Monitoring Ebinur Lake’s Suspended Particulate Matter under the Missing-Data Scenario. Remote Sensing, 13(19), 3952. https://doi.org/10.3390/rs13193952