
High-Accuracy Attitude Determination Using Single-Difference Observables Based on Multi-Antenna GNSS Receiver with a Common Clock

 , ,
, , 
Abstract
:1. Introduction
2. Methods
2.1. Global Navigation Satellite System (GNSS) Short Baseline Attitude Determination Using Multi-Antenna Receiver with Common Clock
2.2. Theoretical Basis of Ambiguity Substitution Approach
2.3. Single-Difference (SD) Observables with Single-Epoch Kalman Filter (KF) Model
3. The Assessment of SD Observables with a Common Clock in Static and Kinematic Mode
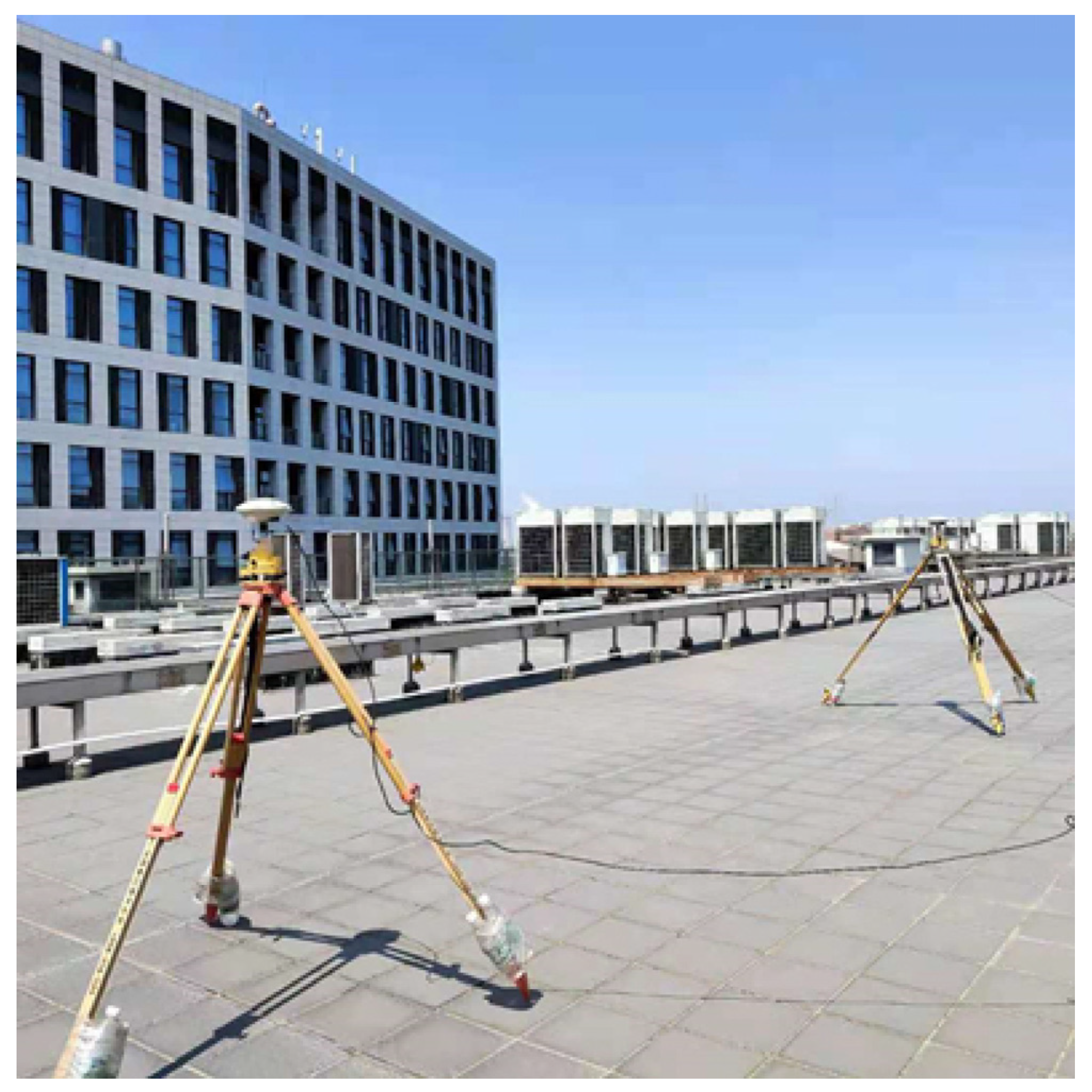
3.1. Static Data Collection
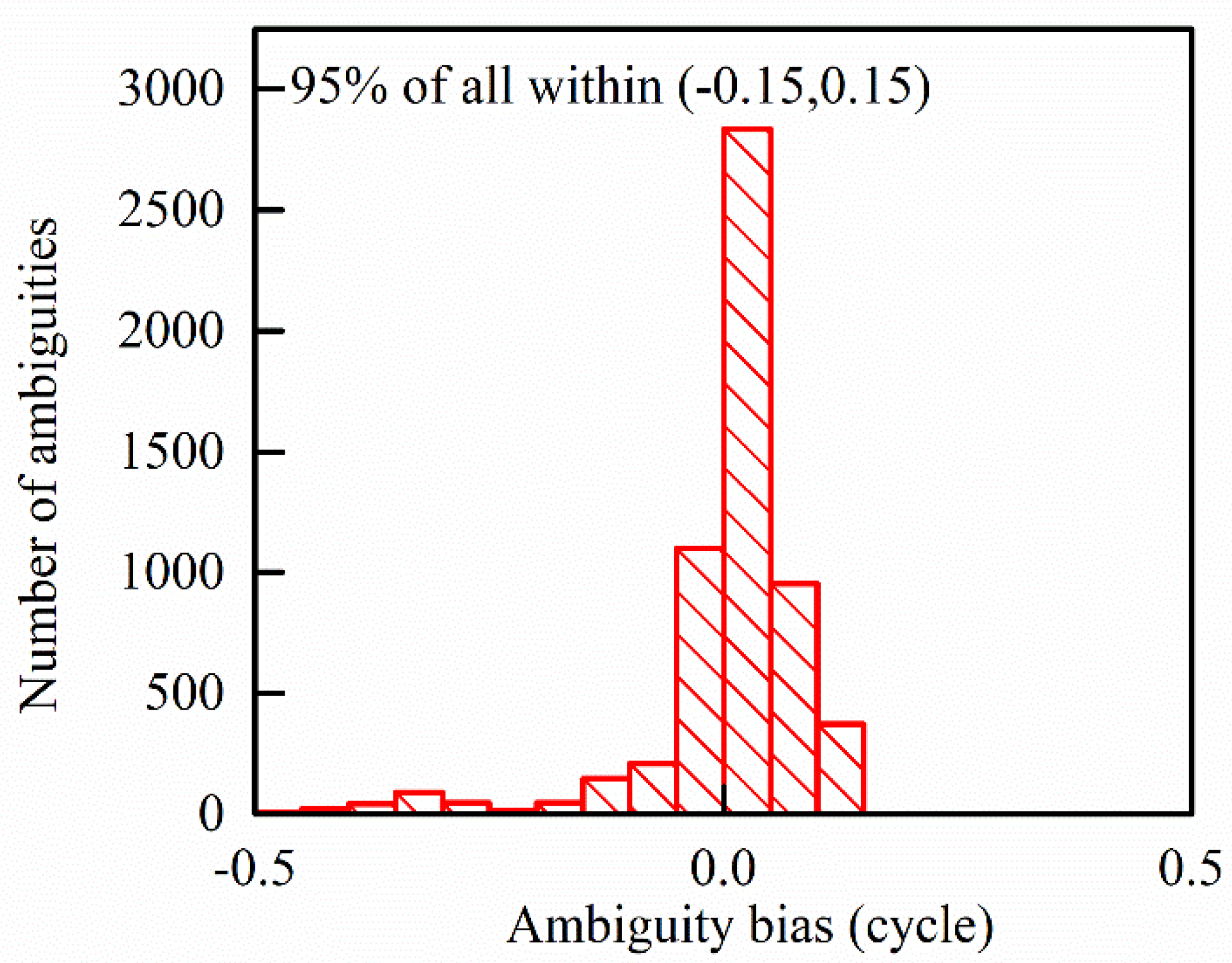
3.2. The Validation of Ambiguity Substitution Approach with a Common Clock
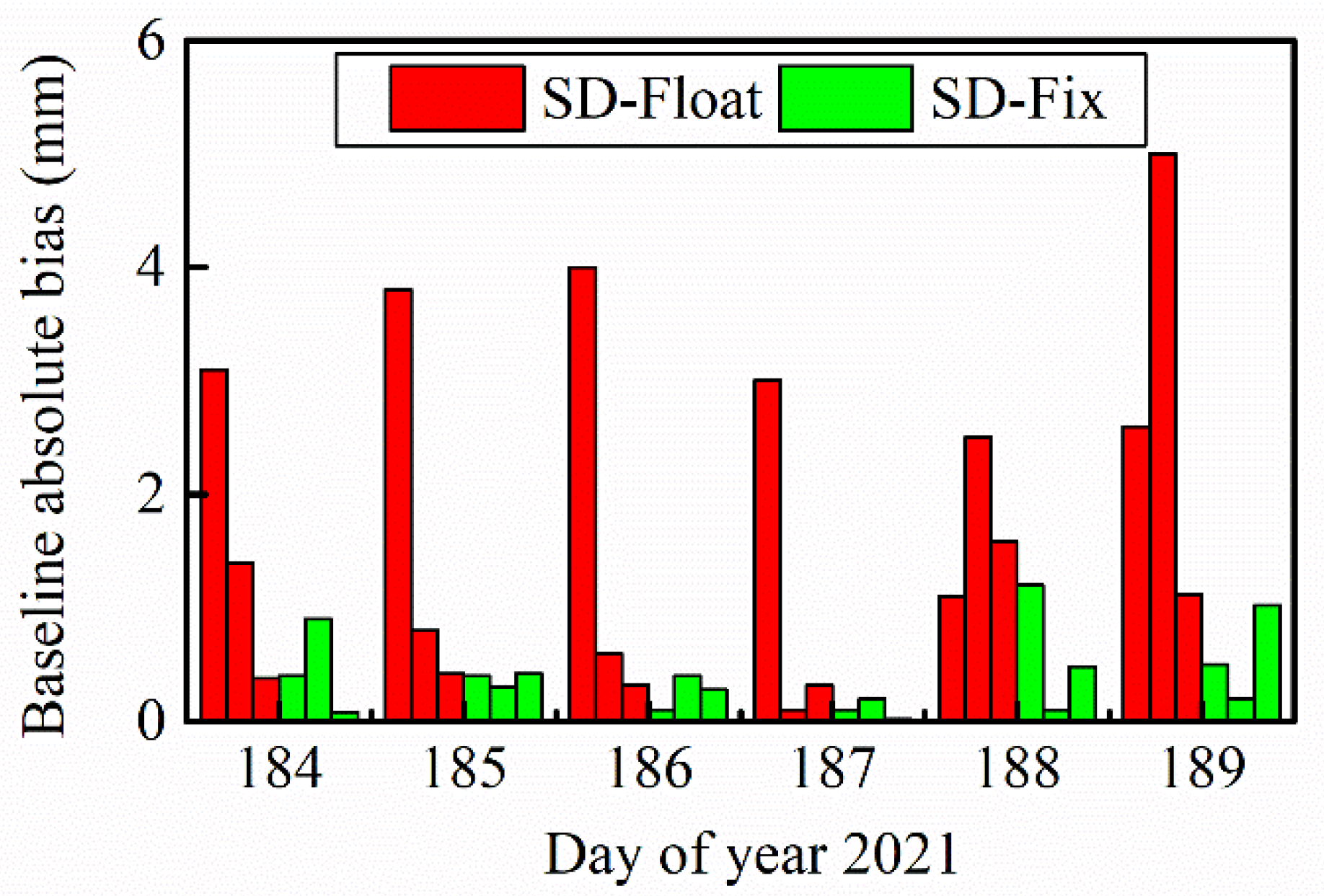
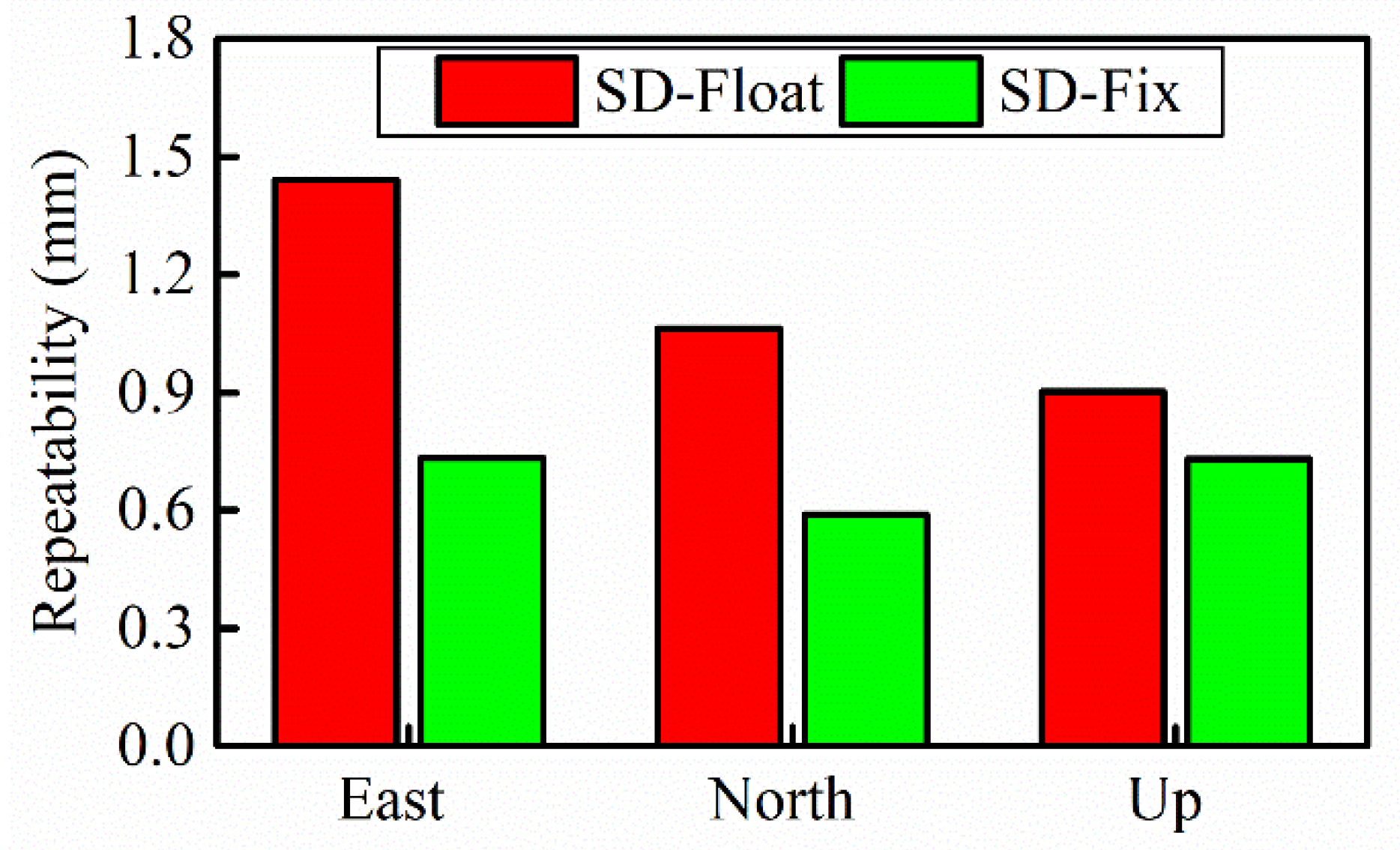
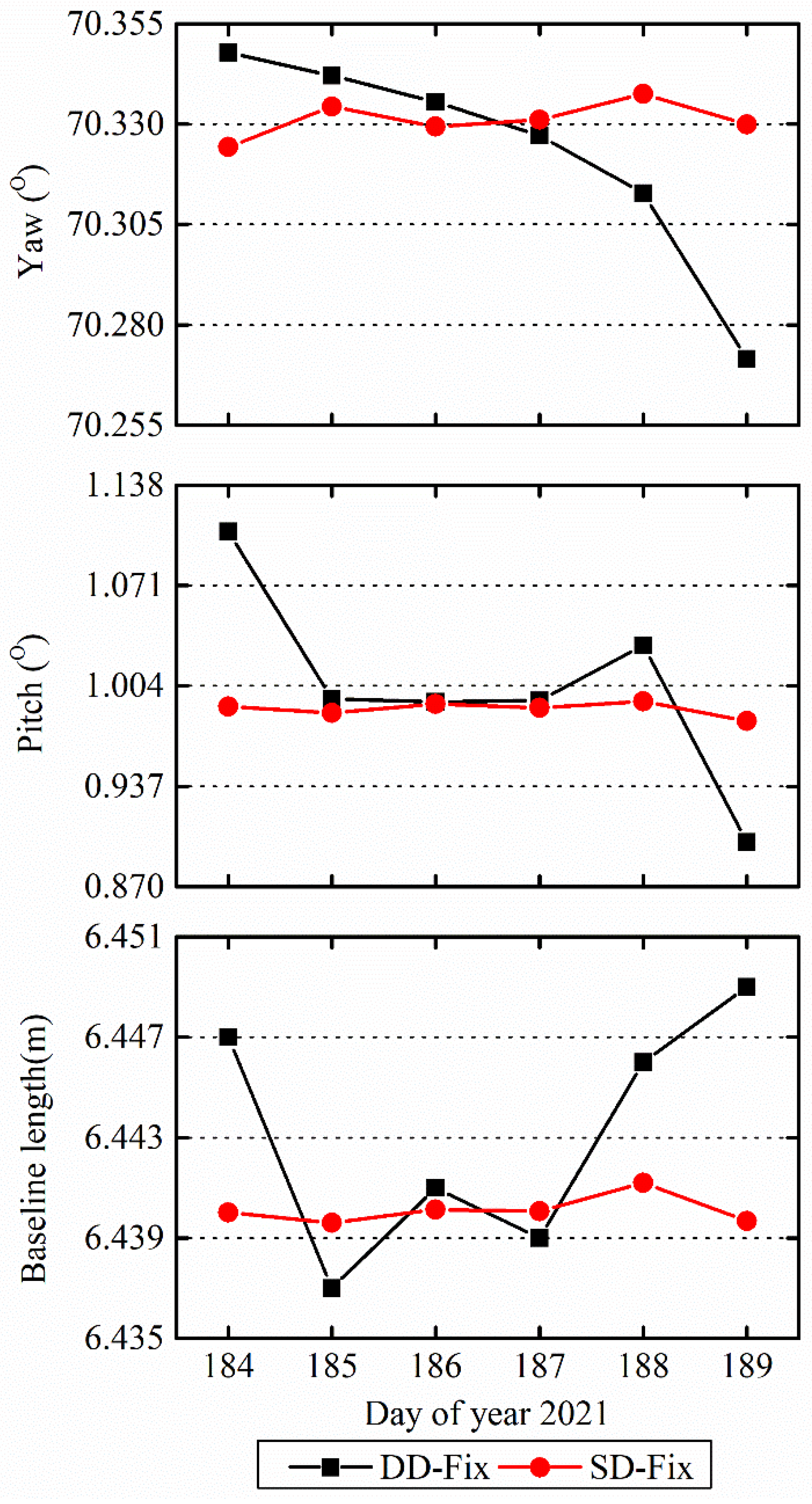
3.3. Comparison of Single-Difference (SD) and Double-Difference (DD) Observables with a Common Clock in Static Mode
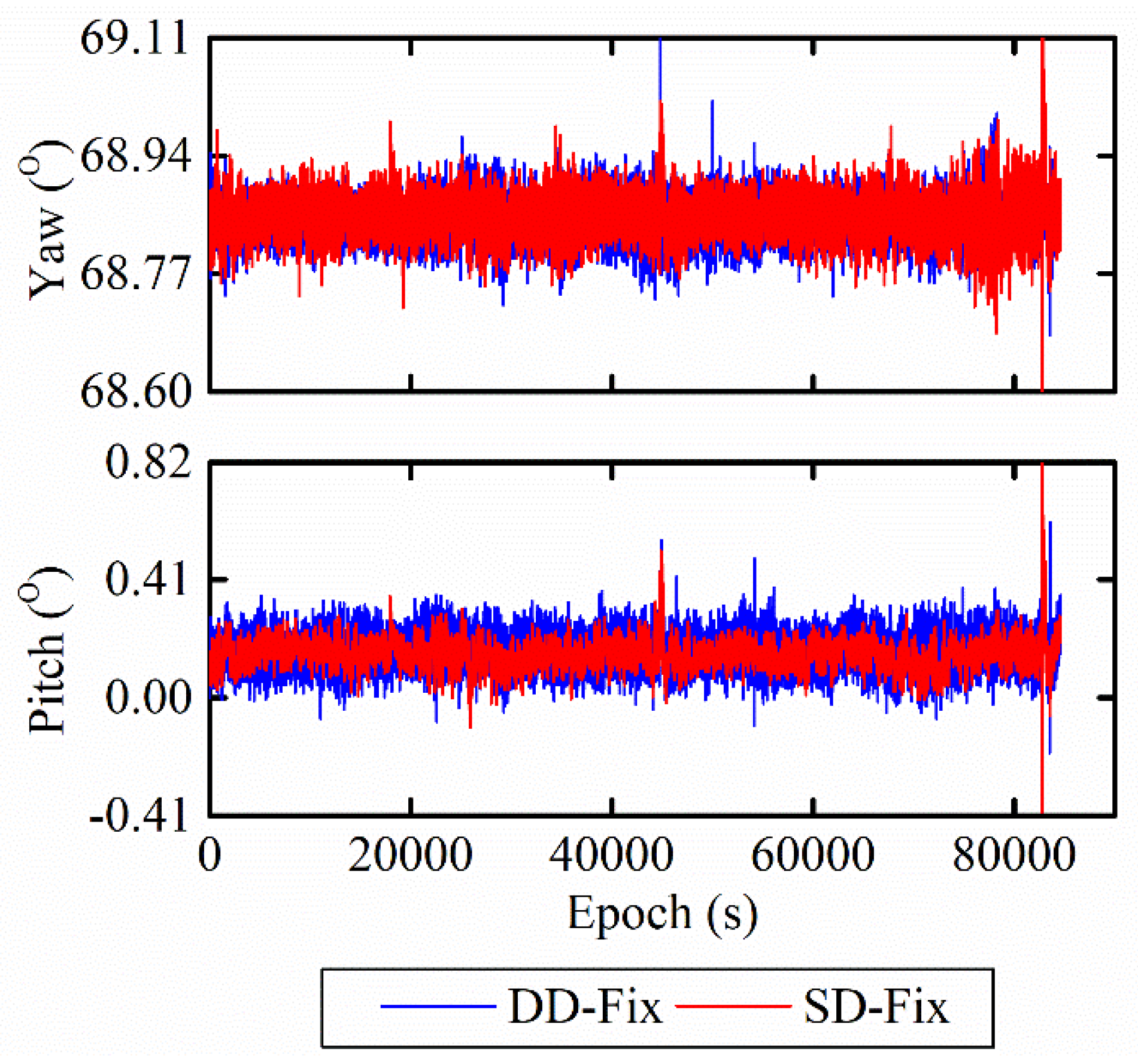
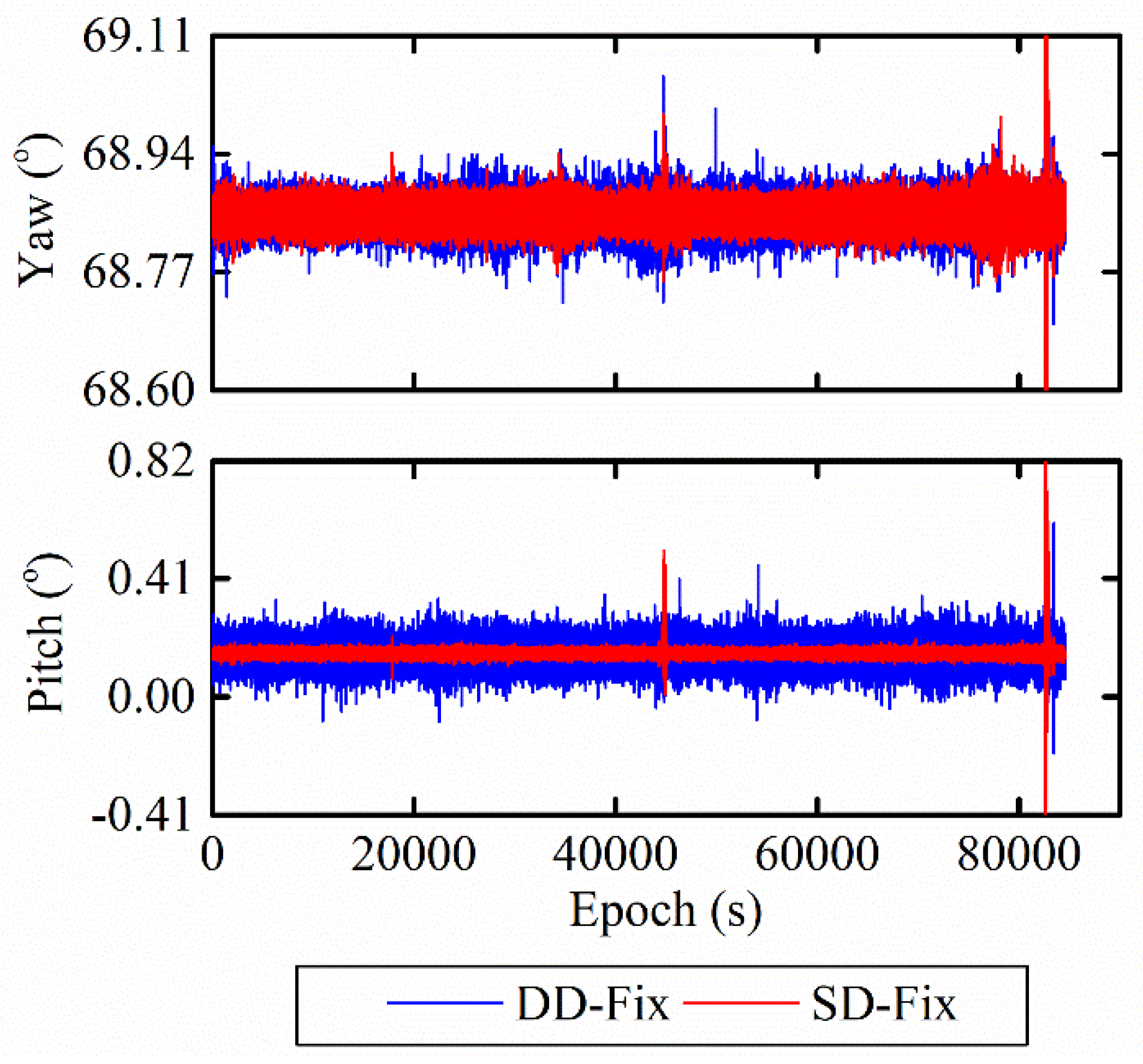
3.4. Comparison of Single-Difference (SD) Observables and Double-Difference (DD) Observables with a Common Clock in Kinematic Mode
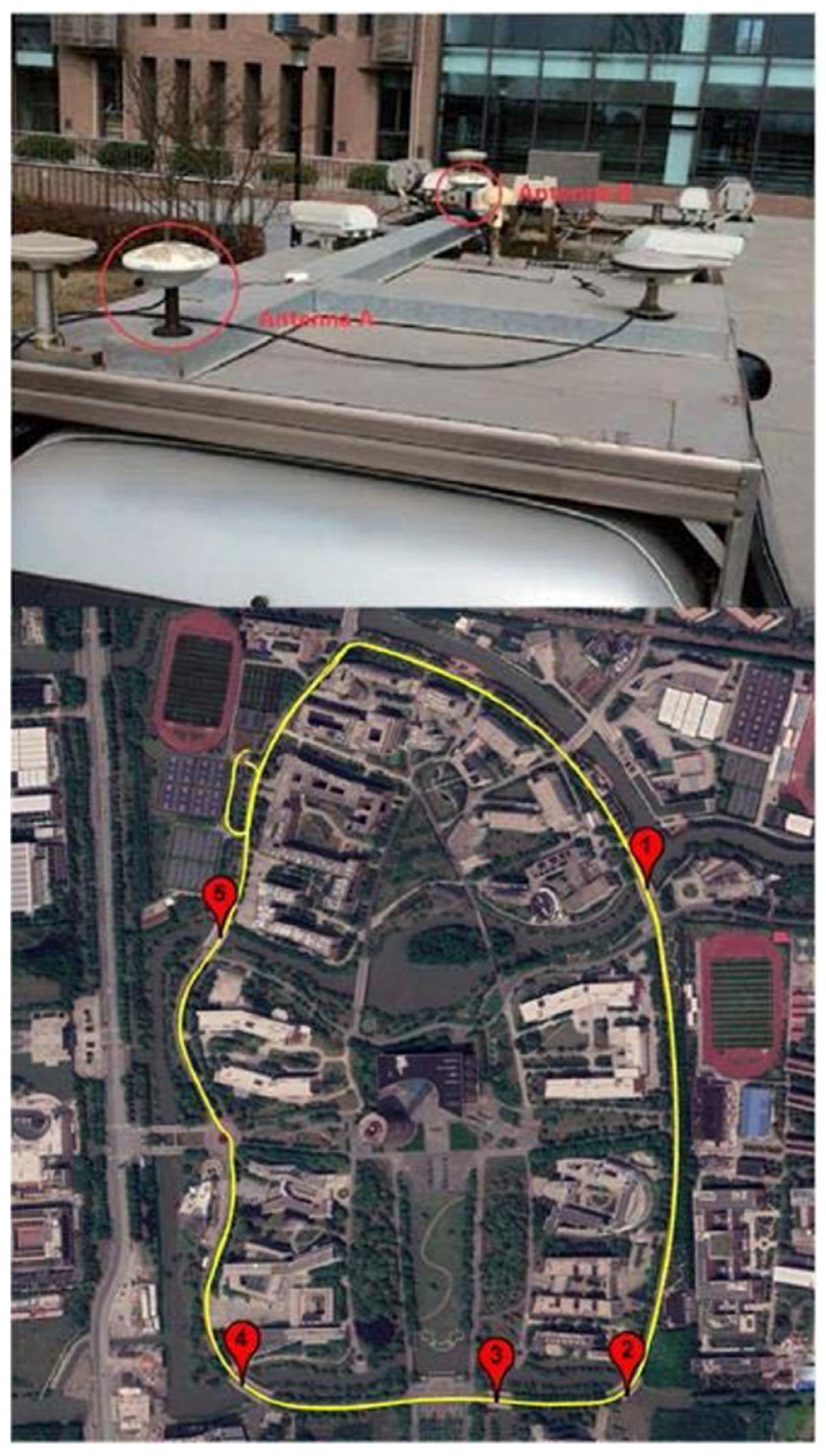
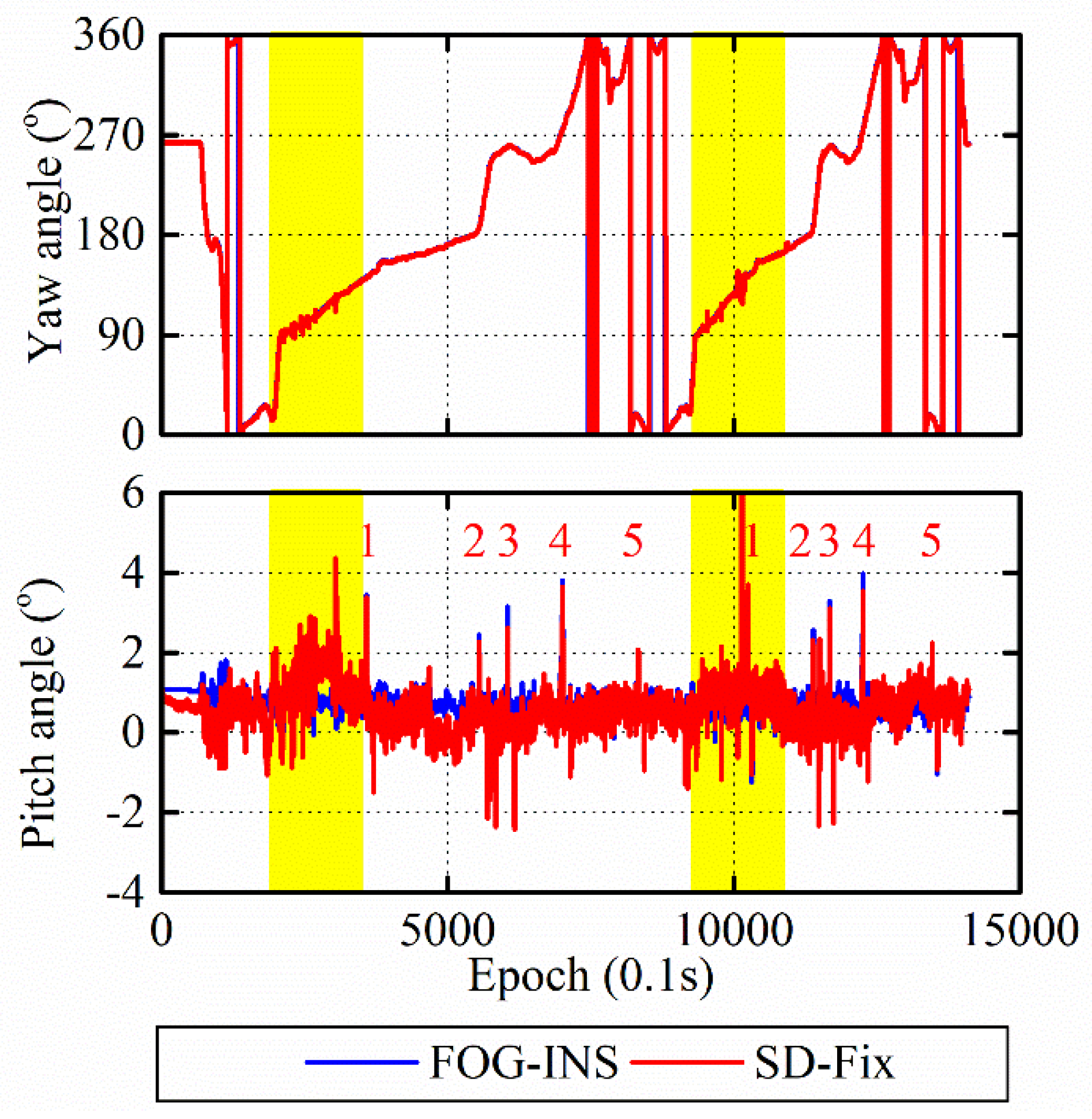
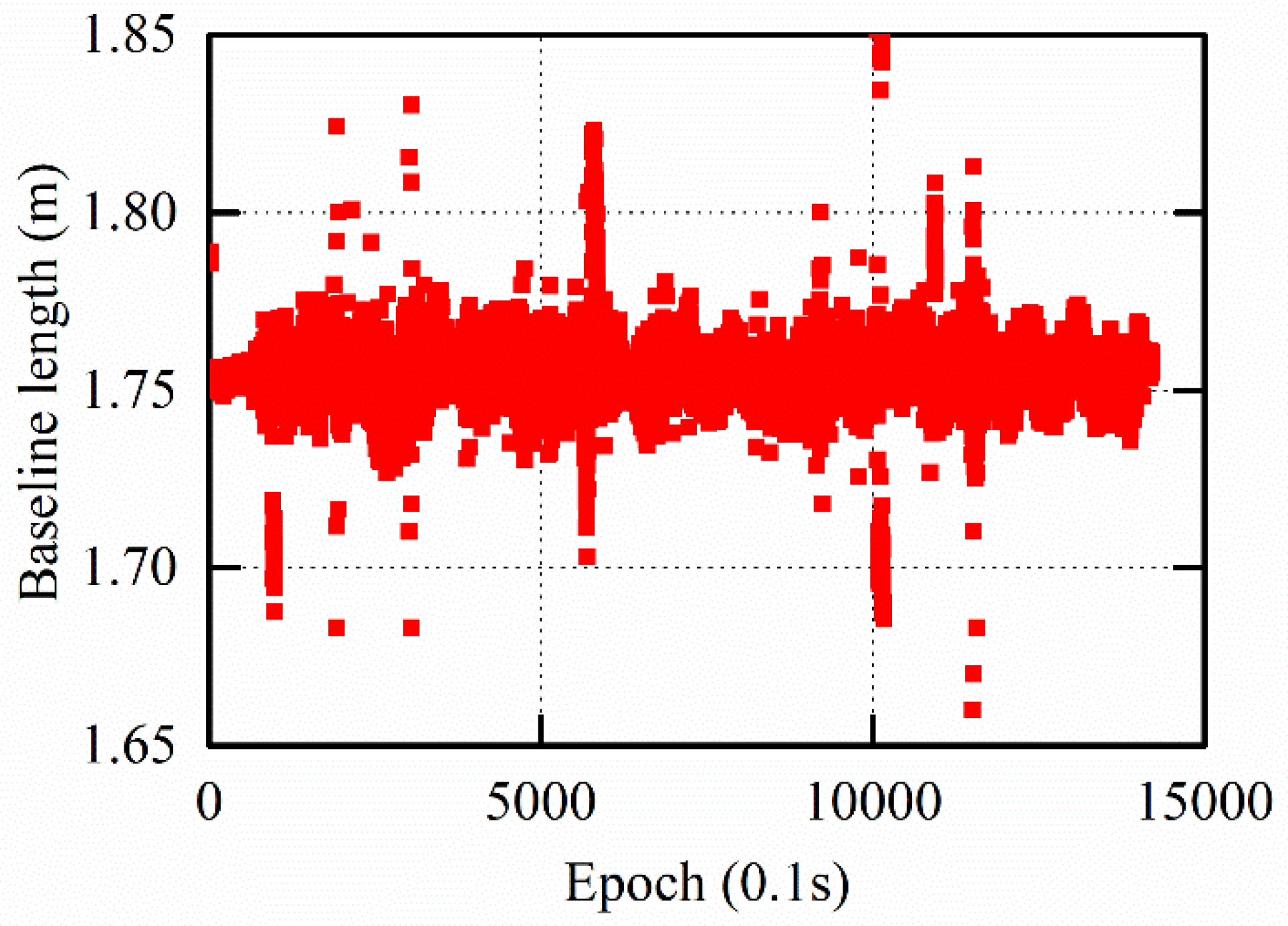
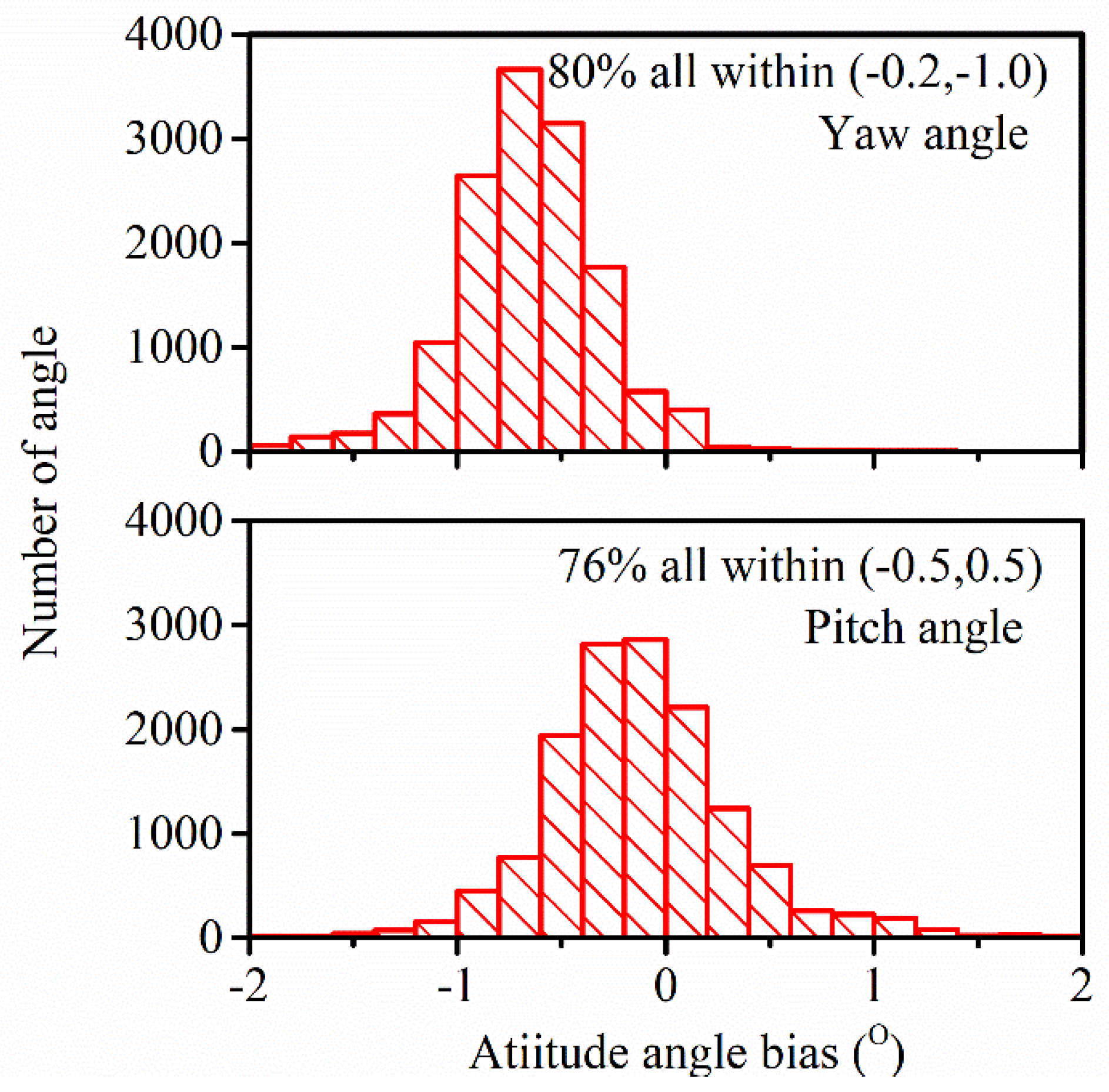
4. The Assessment of SD Observables with a Common Clock in a Vehicle Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, P.; Zhao, Y.; Lin, H.; Zou, J.; Wang, X.; Yang, F. A Novel GNSS Attitude Determination Method Based on Primary Baseline Switching for A Multi-Antenna Platform. Remote Sens. 2020, 12, 747. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Zhao, X.; Pang, C.; Zhang, L.; Xu, Z.; Zou, K. Improving ambiguity resolution success rate in the joint solution of GNSS-based attitude determination and relative positioning with multivariate constraints. GPS Solut. 2020, 24, 31. [Google Scholar] [CrossRef]
- Zhang, S.; Chang, G.; Chen, C.; Chen, G.; Zhang, L. Parameterization-switching GNSS attitude determination considering the success rate of ambiguity resolution. Meas. Sci. Technol. 2020, 31, 065105. [Google Scholar] [CrossRef]
- Medina, D.; Vilà-Valls, J.; Hesselbarth, A.; Ziebold, R.; García, J. On the Recursive Joint Position and Attitude Determination in Multi-Antenna GNSS Platforms. Remote Sens. 2020, 12, 1955. [Google Scholar] [CrossRef]
- Dong, D.; Chen, W.; Cai, M.; Zhou, F.; Wang, M.; Yu, C.; Zheng, Z.; Wang, Y. Multi-antenna synchronized global navigation satellite system receiver and its advantages in high-precision positioning applications. Front. Earth Sci. 2016, 10, 772–783. [Google Scholar] [CrossRef]
- Chen, W.; Qin, H.; Zhang, Y.; Jin, T. Accuracy assessment of single and double difference models for the single epoch GPS compass. Adv. Space Res. 2012, 49, 725–738. [Google Scholar] [CrossRef]
- Chen, W.; Yu, C.; Dong, D.; Cai, M.; Zhou, F.; Wang, Z.; Zhang, L.; Zheng, Z. Formal Uncertainty and Dispersion of Single and Double Difference Models for GNSS-Based Attitude Determination. Sensors 2017, 17, 408. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Chen, W.; Dong, D.; Wang, M.; Cai, M.; Yu, C.; Zheng, Z.; Liu, M. Multipath mitigation based on trend surface analysis applied to dual-antenna receiver with common clock. GPS Solut. 2019, 23, 104. [Google Scholar] [CrossRef]
- Liu, X. A comparison of stochastic models for GPS single differential kinematic positioning. In Proceedings of the 15th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2002), Portland, OR, USA, 24–27 September 2002; pp. 1830–1841. [Google Scholar]
- Liang, Z.; Yanqing, H.; Jie, W. A drift line bias estimator: ARMA-based filter or calibration method, and its application in BDS/GPS-based attitude determination. J. Geod. 2016, 90, 1331–1343. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Least-squares estimation of the integer GPS ambiguities. Presented at the General Meeting of the International Association of Geodesy, Beijing, China, 8–13 August 1993. [Google Scholar]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Giorgi, G. The Multivariate Constrained LAMBDA Method for Single-epoch, Single-frequency GNSS-based Full Attitude Determination. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 1429–1439. [Google Scholar]
- Ma, L.; Lu, L.; Zhu, F.; Liu, W.; Lou, Y. Baseline length constraint approaches for enhancing GNSS ambiguity resolution: Comparative study. GPS Solut. 2021, 25, 40. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Giorgi, G.; Buist, P.J. Testing of a new single-frequency GNSS carrier phase attitude determination method: Land, ship and aircraft experiments. GPS Solut. 2011, 15, 15–28. [Google Scholar] [CrossRef] [Green Version]
- Dong, D.; Bock, Y. Global Positioning System Network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J. Geophys. Res. Solid Earth 1989, 94, 3949. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Success probability of integer GPS ambiguity rounding and bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Li, X. Success rate improvement of single epoch integer least-squares estimator for the GNSS attitude/short baseline applications with common clock scheme. Acta Geod. Geophys. 2014, 49, 295–312. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, K.; Roberts, C.; Murata, M. On-the-fly GPS-based attitude determination using single- and double-differenced carrier phase measurements. GPS Solut. 2004, 8, 93–102. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F.; Berthias, J.-P.; Broca, P.; Cerri, L. Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination. Navigation 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Collins, P.; Bisnath, S.; Lahaye, F.; Héroux, P. Undifferenced GPS Ambiguity Resolution Using the Decoupled Clock Model and Ambiguity Datum Fixing. Navigation 2010, 57, 123–135. [Google Scholar] [CrossRef] [Green Version]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; pp. 129–207. [Google Scholar]
- Xu, G.; Xu, Y. GPS: Theory, Algorithm and Applications, 3rd ed.; Springer-Verlag: Berlin/Heidelberg, Germany, 2007; pp. 63–133. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Geng, J.; Teferle, F.N.; Shi, C.; Meng, X.; Dodson, A.H.; Liu, J. Ambiguity resolution in precise point positioning with hourly data. GPS Solut. 2009, 13, 263–270. [Google Scholar] [CrossRef] [Green Version]
- Chen, W. A remark on the GNSS single difference model with common clock scheme for attitude determination. J. Appl. Geod. 2016, 10, 167–173. [Google Scholar] [CrossRef]
- Blewitt, G. Carrier phase ambiguity resolution for the Global Positioning System applied to geodetic baselines up to 2000 km. J. Geophys. Res. Solid Earth 1989, 94, 10187–10203. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Xia, L.; Chan, T.O.; Xia, J.; Geng, J.; Zhu, H.; Cai, Y. Intrinsic Identification and Mitigation of Multipath for Enhanced GNSS Positioning. Sensors 2020, 21, 188. [Google Scholar] [CrossRef] [PubMed]
- Bilich, A.; Mader, G.L. GNSS absolute antenna calibration at the national geodetic survey. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 1369–1377. [Google Scholar]
- Chang, X.; Paige, C.C. Two carrier phase based approaches for autonomous fault detection and exclusion. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1895–1905. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contents | PADS | Trimble BD982 |
|---|---|---|
| Observables | raw GPS L1 | raw GPS L1 |
| Weighting | elevation-dependent | elevation-dependent |
| Elevation mask (deg) | 10 | 10 |
| Sampling rate (s) | 1 | 1 |
| Observable type | Single-difference (SD) | Double-difference (DD) |
| Orbit type | broadcast | broadcast |
| Process mode | Static | Static |
| Adjustment method | Kalman filter | Kalman filter |
| AR method | ambiguity substitution approach | unknown |
| Estimated parameters | baseline vector, SD ambiguities, and uncalibrated phase delay (UPD) | baseline vector and DD ambiguities |
| STDs | RMSEs | |||||
|---|---|---|---|---|---|---|
| Solutions | Yaw /° | Pitch /° | Baseline Length/mm | Yaw /° | Pitch /° | Baseline Length/mm |
| DD-Fix | 0.02 | 0.06 | 4.4 | 0.02 | 0.06 | 5.05 |
| SD-Fix | 0.004 | 0.004 | 0.52 | 0.004 | 0.004 | 1.1 |
| Solution | Yaw | Pitch |
|---|---|---|
| DD-Fix | 0.04 | 0.06 |
| SD-Fix | 0.04 | 0.05 |
| Solution | Yaw | Pitch |
|---|---|---|
| DD-Fix | 0.02 | 0.04 |
| SD-Fix | 0.02 | 0.02 |
| Attitude Angles | Yaw Angle | Pitch Angle |
|---|---|---|
| RMSE | 0.74 | 0.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Dong, D.; Chen, W.; Cai, M.; Peng, Y.; Yu, C.; Wu, J. High-Accuracy Attitude Determination Using Single-Difference Observables Based on Multi-Antenna GNSS Receiver with a Common Clock. Remote Sens. 2021, 13, 3977. https://doi.org/10.3390/rs13193977
Zhang C, Dong D, Chen W, Cai M, Peng Y, Yu C, Wu J. High-Accuracy Attitude Determination Using Single-Difference Observables Based on Multi-Antenna GNSS Receiver with a Common Clock. Remote Sensing. 2021; 13(19):3977. https://doi.org/10.3390/rs13193977
Chicago/Turabian StyleZhang, Chenglong, Danan Dong, Wen Chen, Miaomiao Cai, Yu Peng, Chao Yu, and Jianping Wu. 2021. "High-Accuracy Attitude Determination Using Single-Difference Observables Based on Multi-Antenna GNSS Receiver with a Common Clock" Remote Sensing 13, no. 19: 3977. https://doi.org/10.3390/rs13193977
APA StyleZhang, C., Dong, D., Chen, W., Cai, M., Peng, Y., Yu, C., & Wu, J. (2021). High-Accuracy Attitude Determination Using Single-Difference Observables Based on Multi-Antenna GNSS Receiver with a Common Clock. Remote Sensing, 13(19), 3977. https://doi.org/10.3390/rs13193977