Vegetation parameter monitoring and biomass inversion is a new research field of GNSS-R remote sensing technology. This section is going to give a comprehensive review of the development of the GNSS-R in vegetation study. Therefore, we have presented the development of GNSS-R on vegetation monitoring according to the platforms. Of course, at first, researchers indeed have presented works on the ground-based experiments, from which they have manifested that the vegetation parameters can be detected by the GNSS-R remote sensing technique (
Section 2.1). Then, several works related to the airborne-GNSS-R vegetation campaigns have been carried out (
Section 2.2). The scientific objectives of these works are related to the fact that the vegetation information can be obtained from airborne experiments. From the ground-based and airborne experiments, the researchers have proven the potentialities of this technique for vegetation study. Then, after the pioneer works have been done, the spaceborne missions have launched and a lot of space-borne data have become available to the scientific community and works related to vegetation study using spaceborne data have emerged (
Section 2.3). At the same time, the development of mechanism models is an important research tool to promote the development of GNSS-R technology; therefore, we give a review of the research status of the GNSS-R vegetation model in detail (
Section 2.4).
2.2. Airborne GNSS-R Vegetation Remote Sensing Experiments
Two airborne experiments carried out by Egido et al. proved that when the biomass is as high as 300 ton/ha, there is still a correlation between the bistatic reflectivity and the biomass [
29].
Under the funding of the SNSB (Swedish National Space Board) and ESA, researchers carried out the BEXUS 17 (Balloon Experiments for University Students) 25 Km stratospheric balloon experiment in the northern forests of Sweden on 10 October 2013 [
30]. The experiments showed that the energy of the received reflected signal is basically independent of the height of the platform for a high coherent integration time (20 ms). The article [
30] also suggested that the received coherent power comes from different forest elements (canopy, soil, etc).
The LEiMON (Land Monitoring with Navigation Signals) experiment was a 6-month GNSS-R experiment on ground-based crops conducted in the Florence agricultural area, Italy, from March to September 2009 [
31]. The experiment used the SAM receiver developed by Barcelona Starlab Company, which was installed on a 25 m high hydraulic boom. This experiment compared and analyzed the relationship between surface roughness, soil moisture content, vegetation moisture content, and GNSS-R signal. The research shows that the correlation between reflected signals (both LR polarization and RR polarization) and vegetation moisture content is good (correlation coefficient is 0.8). It should be noted that here LR refers to the transmitted signal as right hand circular polarization (RHCP) and the received signal is left hand circular polarization (LHCP), while RR means the received signal is also right hand circular polarization.
ESA’s GRASS experiment was conducted in Tuscany, Italy in July and November 2011 [
32]. The first experiment was performed over field crops and the second over a forest with large changes in biomass. Both experiments have confirmed that cross-polarization and polarization ratio are sensitive to vegetation biomass and have a monotonous decreasing relationship. As for the roughness standard deviation below 3 cm, a high correlation coefficient (r
2 = 0.93) and sensitivity (0.2 dB/SMC(%)) have been obtained. They also pointed out that a level of AGB (Average Ground Biomass) values not detectable by other remote sensing systems can be achieved, the copolarized reflection coefficient shows a stable sensitivity of forest AGB with r
2 = 0.9 with a stable sensitivity of 1.5 dB (100 ton/ha). Different from the monostatic radar biomass saturation at 150 ton/ha, the experimental research proves that GNSS-R remote sensing will not be saturated during biomass monitoring.
The subsequent LesLandesforest experiment found that at high elevation angles (70°–90°), the receiver signal still has good sensitivity at 5 × 10–2 dB (ton/ha)
−1. The research once again proves that the GNSS-R signal is indeed not as prone to biomass saturation as the L-band monostatic radar (100–150 ton/ha) [
33].
2.3. Spaceborne GNSS-R Observation Experiment
The TechDemoSat-1 (TDS-1) satellite was successfully launched on 8 July 2014. It is a scientific demonstration satellite with low time resolution (~6 months), and it has now finished its work. The satellite is equipped with a GNSS reflected signal receiver SGR-ReSI (Space GNSS Receiver Remote Sensing Instrument). Camps et al. have used TDS-1 to qualitatively analyze the effects of soil moisture, roughness, terrain, and volume scattering on GNSS-R data [
34]. At the same time, the sensitivity of soil moisture on different ground surfaces around the Earth and large-scale NDVI (Normalized Difference Vegetation Index) to GNSS-R scattering energy was analyzed. They pointed out the feasibility of using spaceborne GNSS-R for vegetation monitoring [
34].
Carreno-Luengo et al. used SMAP’s reflectometer model, i.e., SMAP-R (SMAP-Reflectometry) for the first time to study biomass and soil moisture [
35]. The GPS L2 (fc = 1226.7 MHz) scattered signal is received by the SMAP dual-polarization (H polarization and V polarization) radar receiver, and the DDM (Delay Doppler Map) waveform of the corresponding observation area is obtained through signal processing. It should be noted that the final equation to get the GNSS-R signal is obtained from the integral form of bistatic radar equation and the output of correlation power is DDM waveform. They used the DDM derived observables, such as SNR, polarization ratio, waveform leading-edge LES (Leading Edge Slope), and trailing edge slope TES (Trailing Edge Slope), to analyze the terrain and biomass sensitivity in the Amazon and in northern forests. The Pearson linear correlation coefficient between the soil moisture retrieved by SMAP-R and the soil moisture obtained by the SMAP radiometer is r ≈ 0.6; the average value of the H-polarized SNR is different for different surface types. The waveform derived parameters are sensitive to seasonally changing surface parameters (NDVI and SWI (Soil Water Index)); as the biomass increases (100 ton/ha to 350 ton/ha), the waveform widths of the LES and TES are reduced. Compared with NDVI, biomass is more sensitive to GNSS-R signals (SNR, polarization ratio, LES, and TES). In areas with rough ground or high biomass, GNSS signals will depolarize.
Hugo et al. used CYGNSS L1 data to simulate and analyze the relationship between GNSS-R observations and forest biomass [
36]. The comparative analysis data are the AGB map and the forest canopy height data of ICESat-1/GLAS data. The results of the polynomial regression in the Congo and Amazon regions show that when the forest biomass is lower than ~400 ton/ha, when the biomass increases, the TES and reflectance both decrease. The article also considers the influence of elevation angles on biomass retrieval [
36]. They analyzed the relationship between reflectivity and TES and biomass at 10° intervals and pointed out that biomass was affected by elevation angle due to the effect of different scattering mechanisms. It also points out the influence of surface scattering and volume scattering on TES and effective reflectivity in different biomass. However, it only analyzes from a large amount of observation data, and only uses a 10° interval analysis for the angle, without considering the influence of the scattering azimuth angle.
Santi et al. used TDS-1 and CYGNSS data to study forest biomass: the corrected DDM peak was used to determine the equivalent reflectance, and the data were used to analyze the sensitivity of local and global forest parameters and believed that this parameter includes not only coherent scattering but also incoherent scattering [
37]. Research and analysis show that as the forest biomass increases, the equivalent reflectance decreases. The inversion method is based on a machine learning method, specifically an artificial neural network. The use of incident angle and SNR data can help to improve the inversion accuracy. The local and global inversion results indicate that this inversion method is better for biomass and tree height. Their algorithm was tested on both the selected areas and globally, and it has shown a promising correlation coefficient, r ≈ 0.8.
2.4. Theoretical Model Research
The Z-V scattering model is a GNSS reflected signal model widely used in the GNSS-R field and it was first applied to the ocean surface [
38]. This model is a function of delay and Doppler and it establishes a physical connection between the observed geometric parameters, environmental parameters, and the output observations of the receiver. The essence of the model is the integral form of the bistatic radar equation, which uses the geometric optics limit of the Kirchhoff approximation within the framework of the two-scale surface model to obtain the ocean surface scattering properties. Using this model, a detailed numerical simulation of the waveform has been carried out, and the calculation results show that as for the steep and moderate elevation angle, the scattered signal on the opposite RHCP is much lower. However, signals on RHCP and LHCP start to converge for low-grazing angles.
In the traditional PNT applications of GNSS, reflected signals are considered as harmful signals and should be eliminated. Therefore, most forward physical models focus on code modulation, or use arbitrary values, or use semi-empirical values to determine and define the values of reflected energy, phase, and delay. For GNSS-IR (GNSS-interferometric reflectometry) remote sensing, Nievinski and Larson have developed a forward GPS full-polarization multi-path model (N-L model) [
39], which is based on the physical model of Zavorotny et al. [
38]. This model considers the coherence of the direct signals and the reflected signals, while the response of the receiver antenna and reflecting surface are also fully considered. The model assumes that the received energy comes from the specular reflection of the first Fresnel zone, and the reflectivity of the LR or RR polarization is obtained by changing the dielectric constant. The circular polarization reflectivity is obtained by the linear combination of the horizontal polarization and vertical polarization Fresnel reflection coefficients. Research based on this model and in-situ measurement point out that changes in bare soil, vegetation, and snow parameters will cause changes in GPS interferogram metrics (effective reflectometer height, phase, and amplitude) [
40,
41,
42]. Researchers have used GPS site data in the PBO network to study the terrestrial parameters. Based on the Nievinski–Larson forward GPS multi-path model, the article used measured data to test the relationship between SNR data and near-surface soil moisture and pointed out that soil moisture on the top 5 cm surface has a significant impact on SNR data, and soil texture has almost no effect on GPS interference signals [
41]. Chew et al. have analyzed the influence of canopy parameters on GPS SNR data, and their theoretical model was successfully verified with measured vegetation data [
43].
Ferrazzoli et al. have used the discrete Tor Vergata model to simulate and analyze the feasibility of GNSS-R for forest biomass [
22]. This model assumes an ensemble of dielectric elements above the random rough surface. As for the case of forests, the elementary scatterers are cylinders, disks, and needles: the trunks and branches are modeled as cylinders, while the broad leaves are modeled as disks and the conifer leaves are simulated by needles. It is pointed out that unlike the phenomenon of biomass saturation in mono-static radar monitoring, it is not prone to saturation when using GNSS-R technology [
22]. The model simulation found that the coherent energy is much larger than the incoherent energy. It is believed that the energy obtained by the receiver mainly comes from the specular reflection of the first Fresnel zone. Therefore, the article focused on the analysis of specular scattering characteristics. A deciduous forest site in Hawaii is employed as the in-situ measurement to test the monostatic model and then the simulations in the specular direction are carried out to analyze the results. The relationship between the LR polarization energy and the biomass is analyzed using the bistatic radar formula, and it is pointed out that when the biomass increases, the LR polarization energy decreases [
22]. They also pointed out that for the RL polarization, the specular measurements at low incidence angles are more suitable for forest applications.
Dr. Masters extended the Z-V model to the application of soil moisture [
44], he pointed out that the forward scattering from a land surface was similar to scattering from ocean surface; they thought the theoretical simulations presented in ocean surface were also applicable to land surface. The main difference between ocean surface and land surface is the dielectric constant of the targets, as for land surface, surface roughness and vegetation cover are two main factors that affect the scattering properties. Their simulations indicate that the width of the correlation waveform on a flat and bare soil surface is much narrower than from a rougher ocean surface. They also carry on three aircraft fights specifically to collect land reflections and verify their theoretical fundamentals.
During the LEiMON project, SAVERS (The Soil And Vegetation Reflection Simulator) model based on the framework of the Z-V model has been developed [
45]. The signal correlator power output is a function of the time delay and the Doppler shift, i.e., DDM. Matlab and Fortran are used to develop the SAVERS model. The model is divided into two parts, one is the observation geometry calculation module, and the other one is the ground reflection characteristic calculation module. The Fung and Eom coherent scattering coefficients and Advanced Integral Equation Models are used to calculate the coherent and noncoherent scattering characteristics of bare soil, respectively. The Tor Vergata model is used to calculate vegetation scattering. After confirming the position and speed information of the transmitter and receiver, parameters are put into the geometry module to get the specular reflection point, meanwhile the antenna pattern and iso-Doppler are obtained. Combined with the scattering coefficient module, i.e., to get the reflected surface scattering properties, the final delay Doppler map module is obtained. From the simulator, we can acquire the DDM parameters and then by extracting the peak and waveform information, we can obtain the reflected surface properties. This simulator can provide the intermediate quantities (such as the geometrical parameters and the bistatic scattering coefficient) and the final DDM, the waveform values for all transmitter positions are also available. At the same time, the article uses LEiMON experimental data to verify the model results. They simulate the influence of surface parameters and observation geometry on GNSS-R received energy and take into account factors such as antenna polarization mismatch and cross-polarization isolation through the method of polarization synthesis. The simulations indicate that SAVERS can reproduce very well the ground surface under different situations at LR polarization and low incidence angles. It should be noted that the results at RR polarizations are less satisfactory. One potential reason is that the instrument produced a saturation effect under a certain value.
SCoBi-Veg (Signals of Opportunity Coherent Bistatic Scattering Model for Vegetated Terrains) is a bistatic model for SoOP-R vegetation remote sensing applications [
46]. It can simulate the polarization reflection of vegetation canopy on flat ground. Monte Carlo is employed in their work to obtain a large number of realizations. The model assumes that the incident signal source is a navigation satellite or digital communication satellite signal, and the frequency covers the P-band and S-band. Analytical wave theory and discrete Born approximation are used in the model to explain the effects of transmitting and receiving antennas and surface scattering in detail (i.e., polarization crosstalk/mismatch, orientation, and altitude). Three main contributions of the received complex field can be calculated, the first one is the direct term, which is the shortest path between antennas, while the second one is the scattering properties along the specular direction. The last term is the diffuse scattered wave and it can account for both antenna and scene characteristics. This model can be oriented to the P-band SoOP-R and L-band GNSS-R. However, experiment validations are not carried out during their work. In order to illustrate the usefulness of this mode for interpretation of field data, they employed tree canopies at P-band and presented an analysis of polarimetric specular and diffuse contributions to bistatic scattering in detail.
Empirical results over boreal forests from a stratospheric balloon suggested that the coherent scattering term is roughly independent of the platform’s height [
30]. The EMISVEG simulator further analyzed this hypothesis [
47,
48]. Lindenmayer systems were used to generate fractal geometry and the Foldy’s approximation was used to account for attenuation and phase change of the coherent wave propagating in the forest media. EMISVEG uses signals at RHCP and LHCP. In the model, the tree components are located above the dielectric rough plane, which is assumed to be illuminated by the electromagnetic field. Branches and tree trunks are modeled by stratified dielectric cylinders, while the leaves are modeled by dielectric needles [
47,
48].
In Hugo et al.’s work, they have employed the EMISVEG simulator to discuss their experiment results [
49]. The article has presented a spaceborne GNSS-R end-to-end simulator that is oriented to land surface [
50]. The simulator is an extension of the previous ocean simulator. However, the new land surface simulator is very generic and it includes the detail observation geometry, arbitrary GPS, and Galileo transmitted signals and frequencies, GNSS-R instrument antenna, and receiver errors. Meanwhile, more detailed information of the surface parameters, such as topography, surface roughness, soil moisture, vegetation cover, have also been included in the new developed simulator. Their results are compared with the TDS-1 DDMs for four different cases. The peak values of the simulated DDM are consistent with the TDS-1 DDMs.
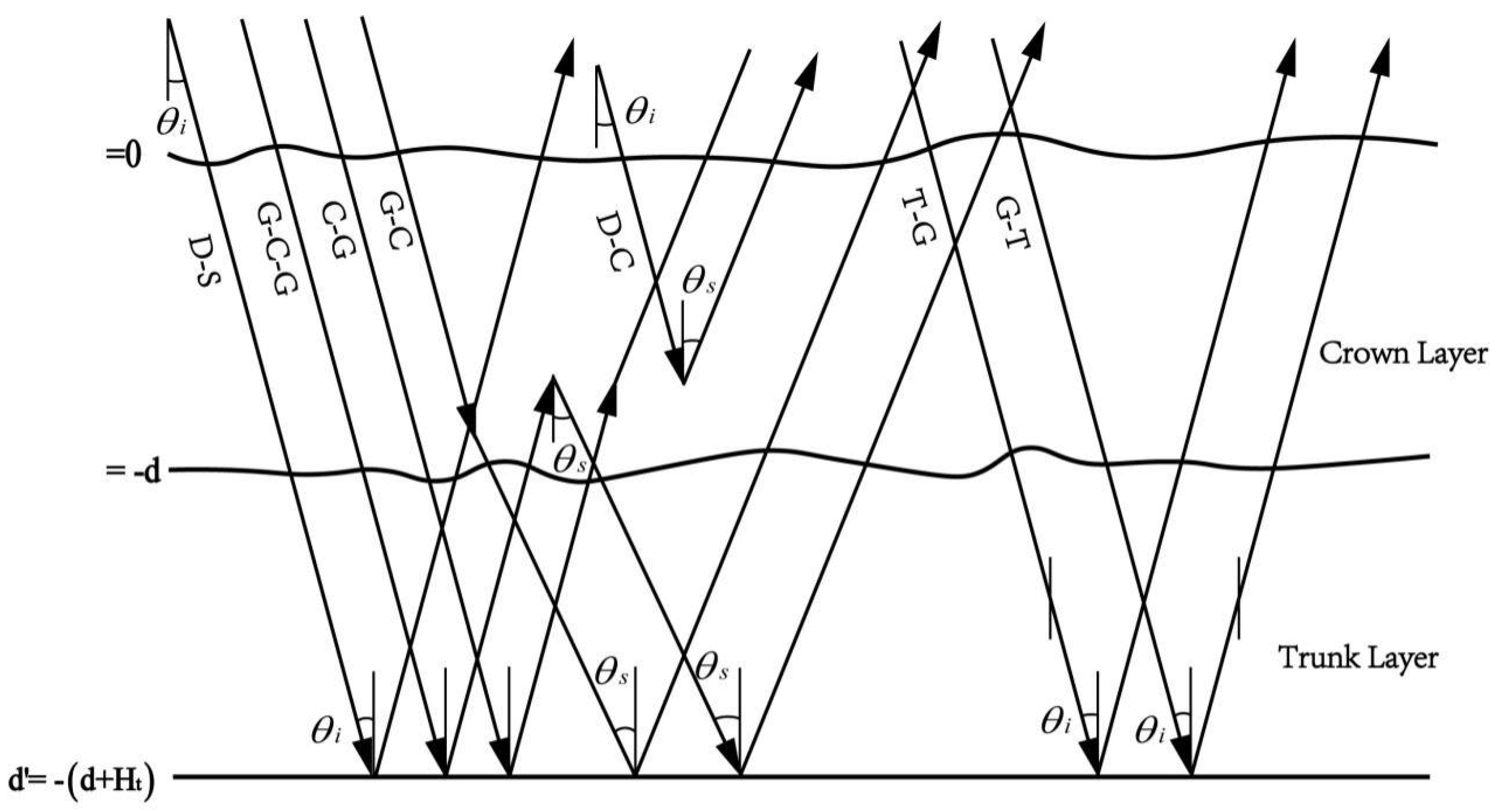
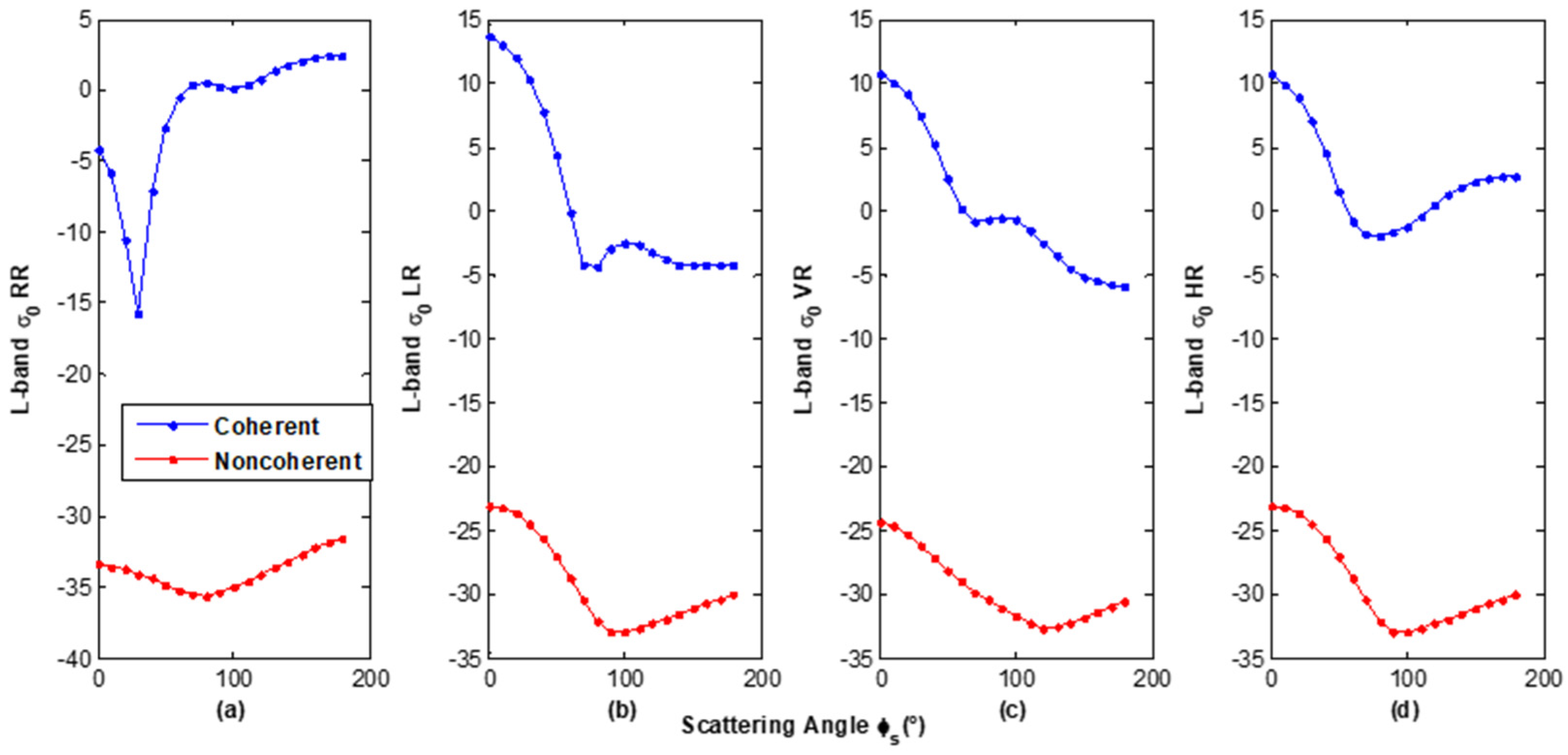
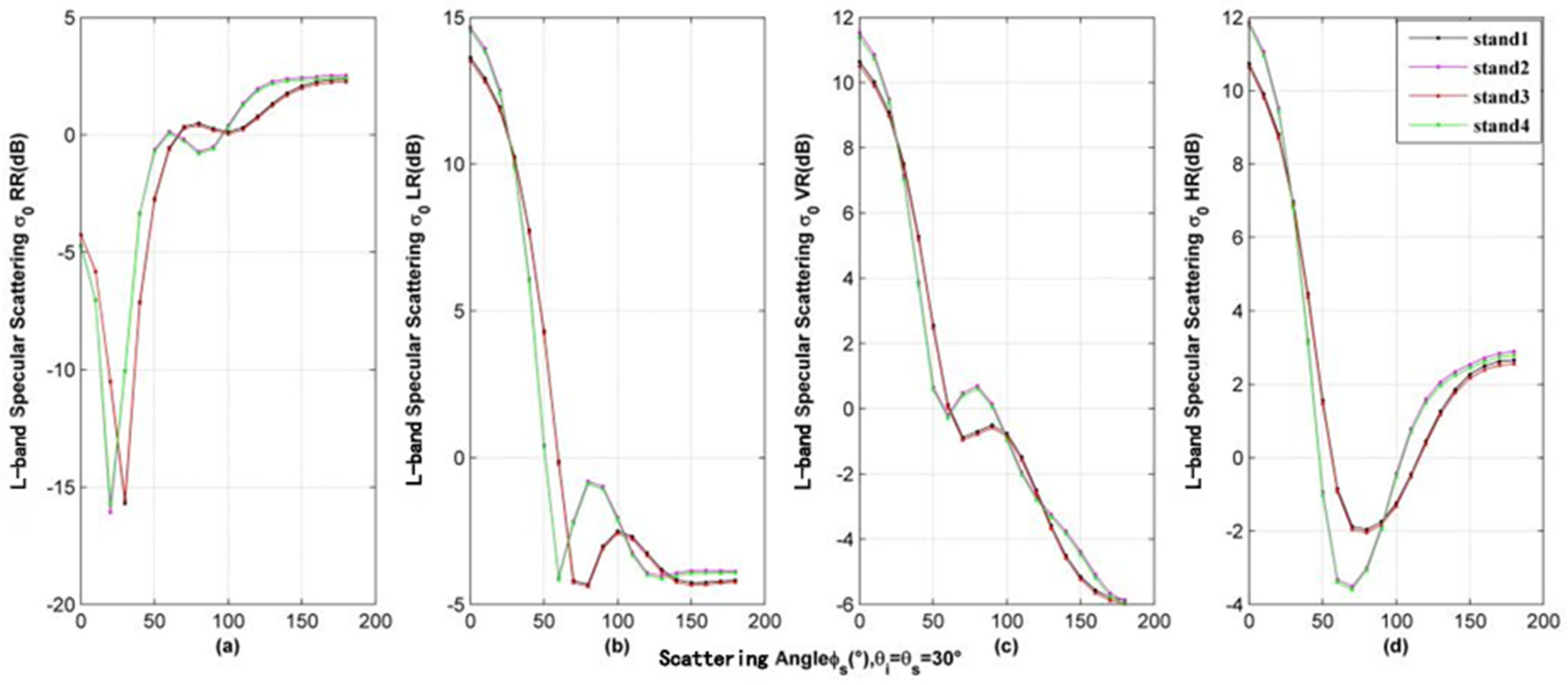
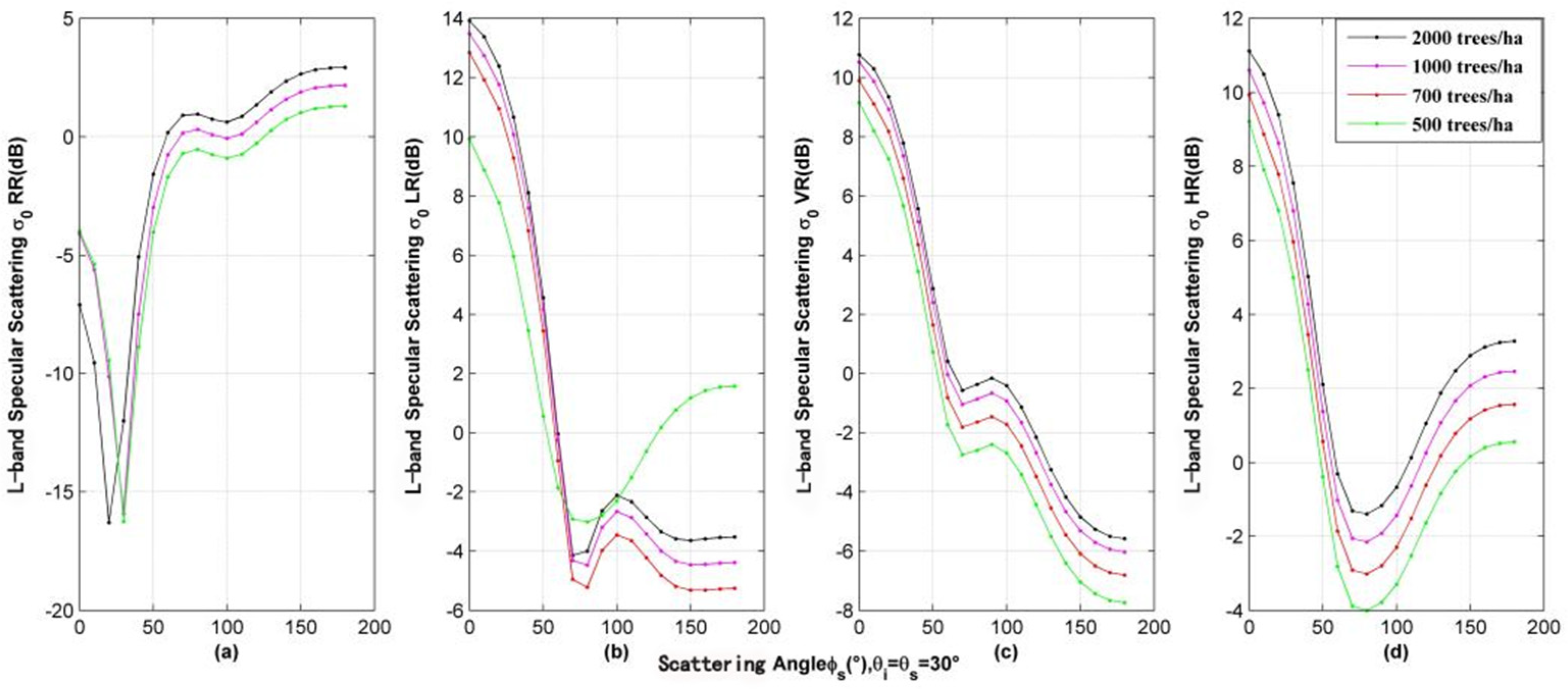
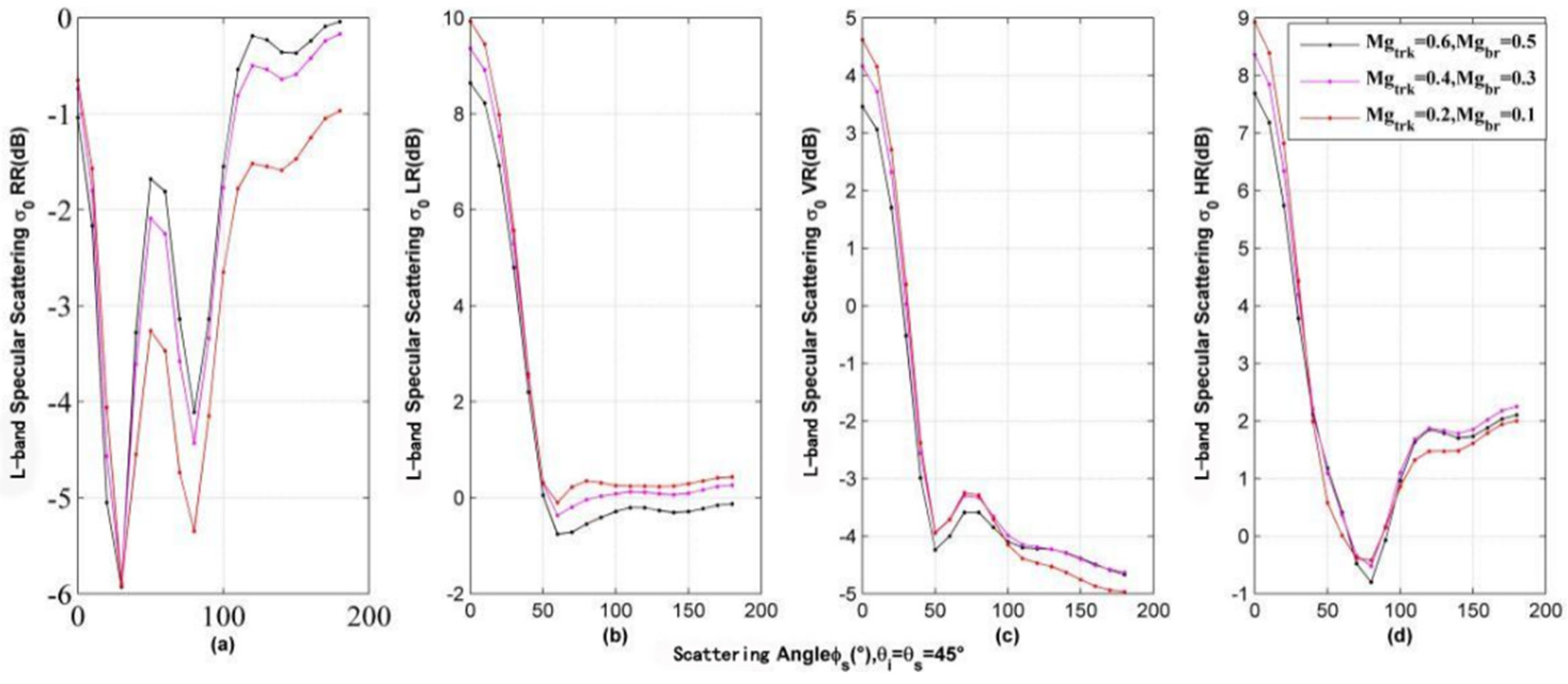
Wu et al. focused on using the vegetation first-order radiation transfer equation model to study the polarization characteristics of different canopies [
51,
52,
53]. It is worth noting that the traditional first-order radiation transfer equation model mainly focuses on the linear polarization of monostatic-radar or radiometers to study the backscattering or radiation characteristics [
54]. Wu et al. have employed its bistatic scattering and full-polarization characteristics to describe in more detail the bistatic scattering characteristics of different vegetation when the observation geometry and polarization characteristics change [
51]. In their work, the polarization synthesis method is employed to calculate the scattering characteristics of various polarizations including circular polarization. When the transmitted signals are RHCP, the received signals are circular polarization (RHCP and LHCP) and linear polarization (horizontal polarization and vertical polarization), and the corresponding scattering characteristics are simulated. At the same time, the article also compares and analyzes the linear polarization scattering characteristics and the circular polarization scattering. The scattering difference in polarization puts forward a new direction of using polarization characteristics for GNSS-R land surface remote sensing monitoring. This is because the backscattering model has been verified by measured data, and the in-situ measurement data of bistatic radar limit the feasibility of its data verification. Therefore, the author verified the reliability of the developed model in the bistatic and full-polarization scattering characteristics through the method of “model verification model” [
51,
52,
53]. However, actual measured data are still needed to verify the model in the near future.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}