
Spatial Variability of Suspended Sediments in San Francisco Bay, California


Abstract
:1. Introduction
2. Materials and Methods
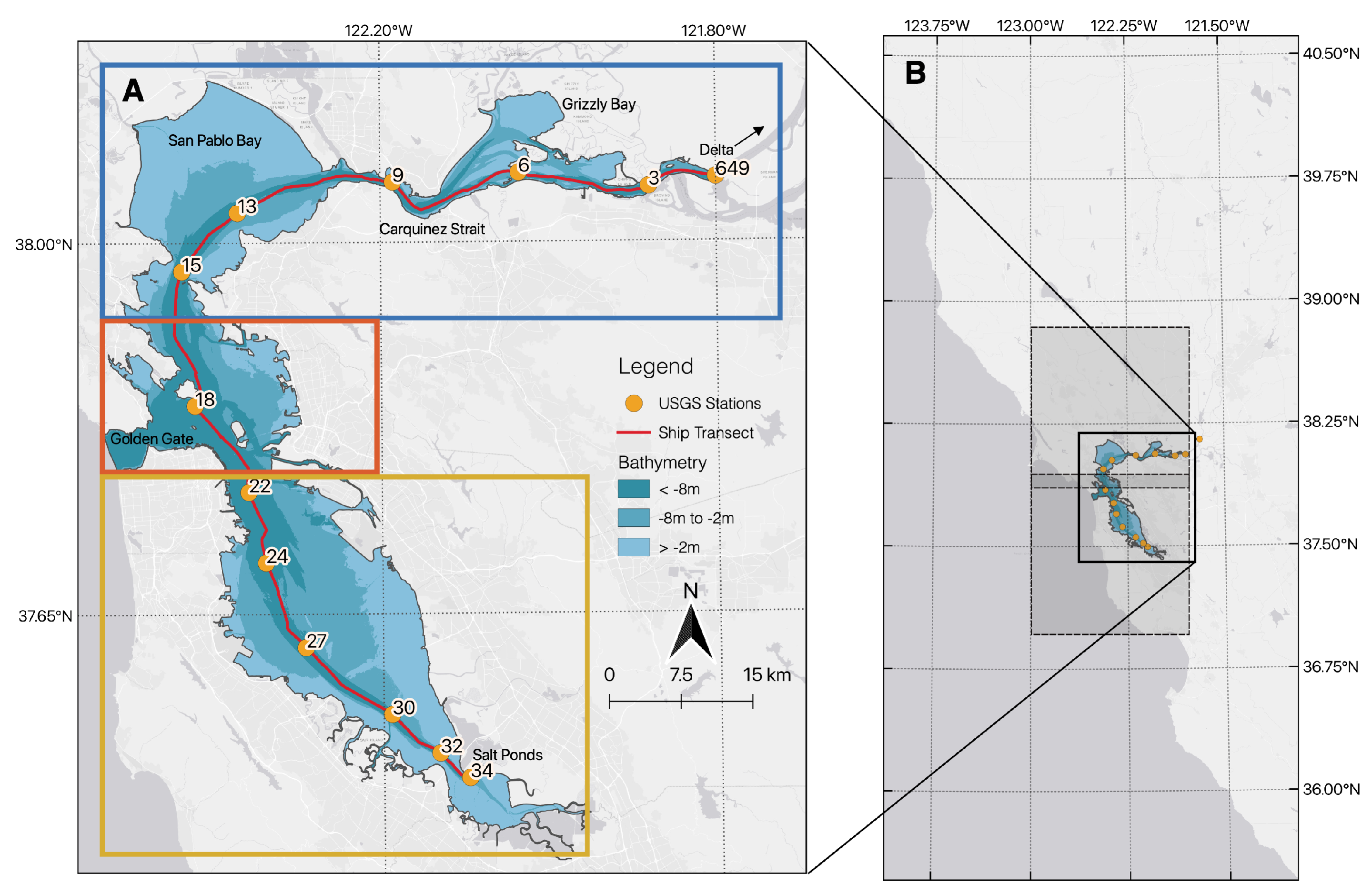
2.1. Study Area
2.2. Data Overview
2.3. USGS In-Water Data
2.4. Shipboard Radiometry Data
2.5. Satellite Image Processing
2.6. Spatial Variability Analysis
2.7. Environmental Data
3. Results
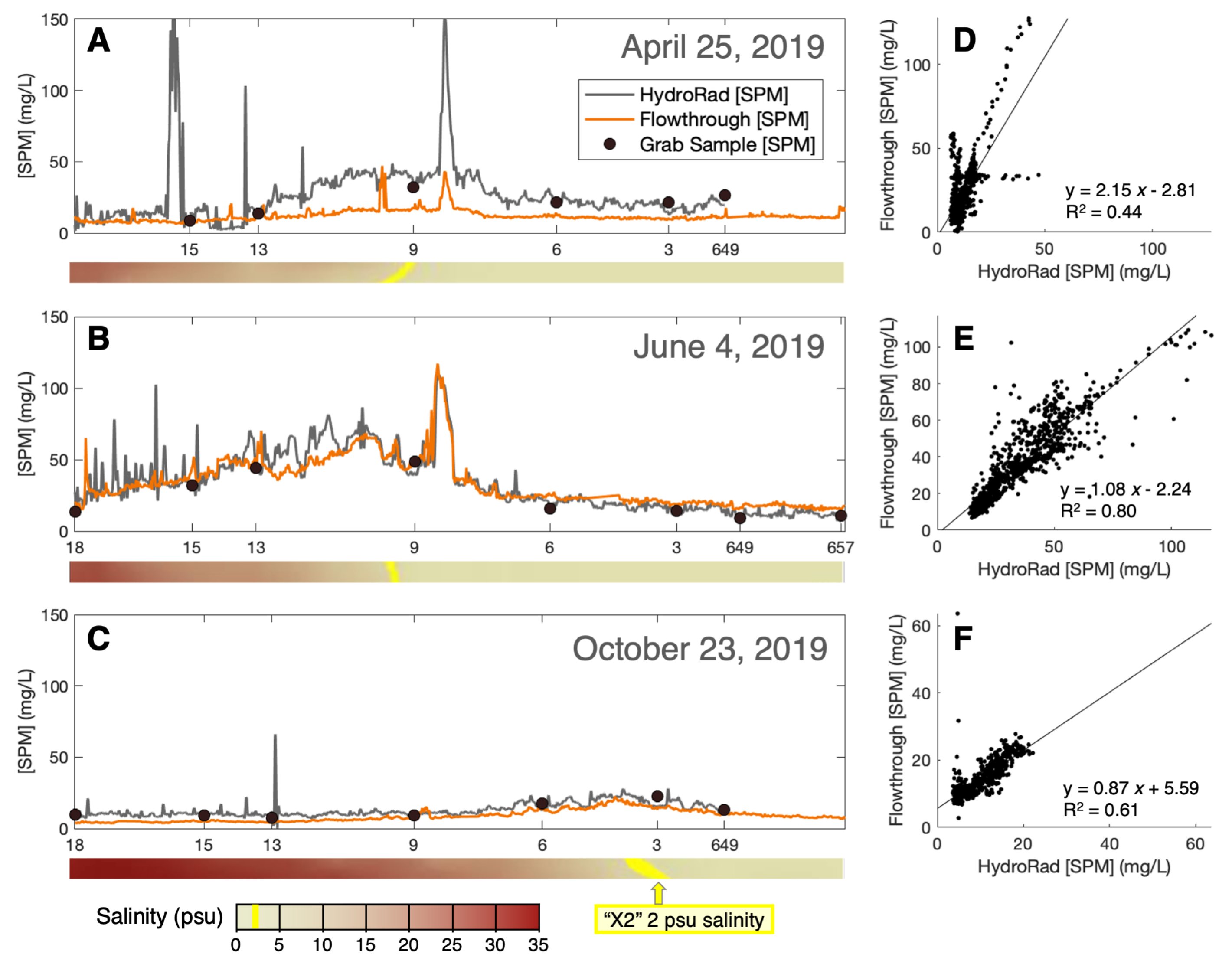
3.1. Shipboard Radiometry and Flowthrough Comparison
3.2. Satellite Retrievals
3.3. Satellite SPM Results
3.4. Spatial Variability Analysis
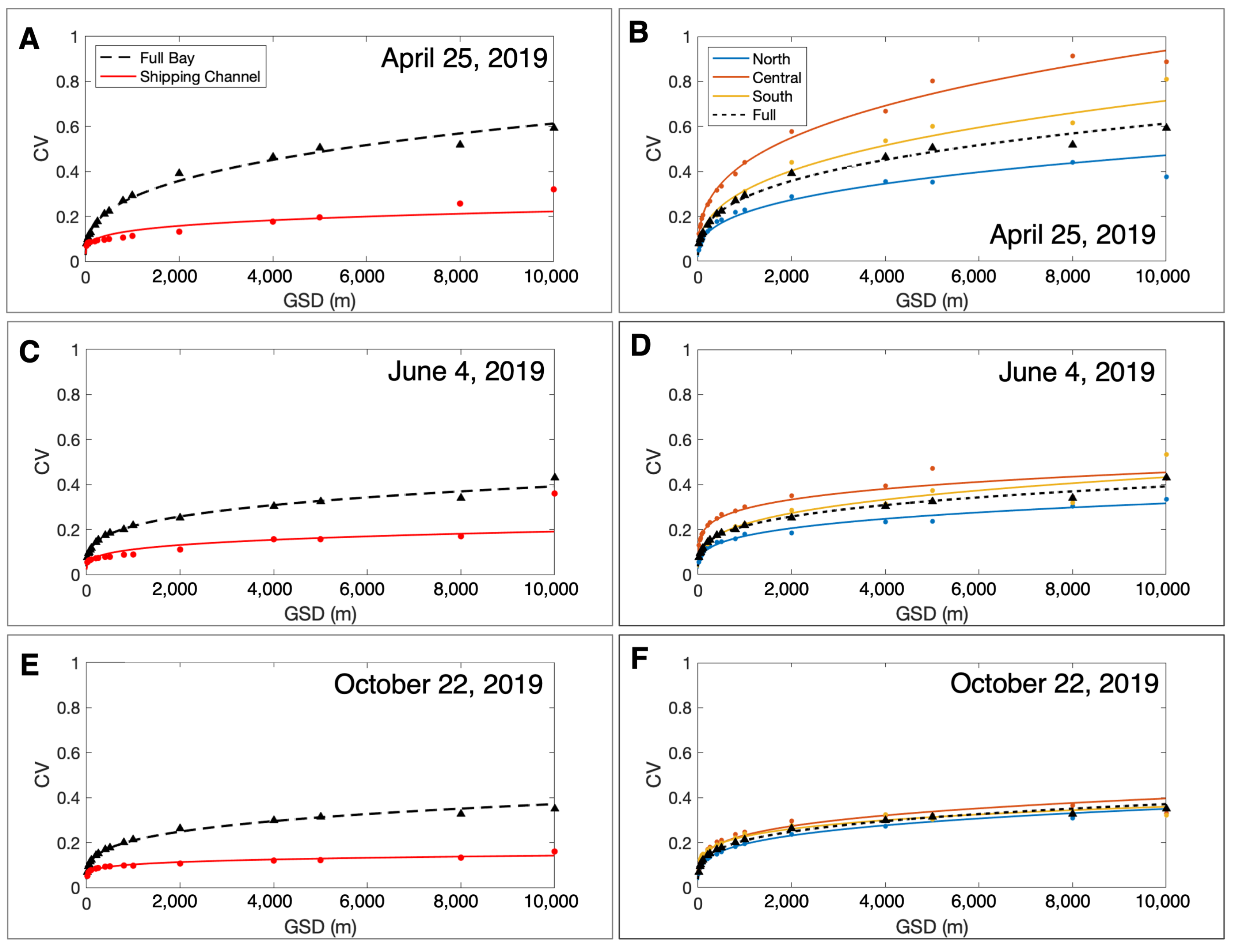
3.4.1. Comparison between Dates
3.4.2. Regional Comparison
4. Discussion
4.1. Comparison of Datasets
4.2. Spatial Variability
Differences between Dates
4.3. Differences between Regions
4.4. Differences between the Shipping Channel and Full Bay
4.5. Implications for Monitoring
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Conomos, T.J.; Smith, R.E.; Gartner, J.W. Environmental setting of San Francisco Bay. Hydrobiologia 1985, 129, 1–12. [Google Scholar] [CrossRef]
- Ruhl, C.A.; Schoellhamer, D.H.; Stumpf, R.P.; Lindsay, C.L. Combined use of remote sensing and continuous monitoring to analyse the variability of suspended-sediment concentrations in San Francisco Bay, California. Estuar. Coast. Shelf Sci. 2001, 53, 801–812. [Google Scholar] [CrossRef]
- Powell, T.M.; Cloern, J.E.; Huzzey, L.M. Spatial and temporal variability in South San Francisco Bay (USA). I. Horizontal Distributions of salinity, suspended sediments, and phytoplankton biomass and productivity. Estuar. Coast. Shelf Sci. 1989, 28, 583–597. [Google Scholar] [CrossRef]
- Ganju, N.K.; Schoellhamer, D.H.; Warner, J.C.; Barad, M.F.; Schladow, S.G. Tidal oscillation of sediment between a river and a bay: A conceptual model. Estuar. Coast. Shelf Sci. 2004, 60, 81–90. [Google Scholar] [CrossRef]
- Schoellhamer, D.H. Sudden Clearing of Estuarine Waters upon Crossing the Threshold from Transport to Supply Regulation of Sediment Transport as an Erodible Sediment Pool is Depleted: San Francisco Bay, 1999. Estuaries Coasts 2011, 34, 885–899. [Google Scholar] [CrossRef]
- Bever, A.J.; MacWilliams, M.L.; Fullerton, D.K. Influence of an Observed Decadal Decline in Wind Speed on Turbidity in the San Francisco Estuary. Estuaries Coasts 2018, 41, 1943–1967. [Google Scholar] [CrossRef]
- Schoellhamer, D.H. Influence of salinity, bottom topography, and tides on locations of estuarine turbidity maxima in northern San Francisco Bay. Proc. Mar. Sci. 2000, 3, 343–357. [Google Scholar] [CrossRef]
- Hilton, A.E.; Bausell, J.T.; Kudela, R.M. Quantification of polychlorinated biphenyl (PCB) concentration in San Francisco Bay using satellite imagery. Remote Sens. 2018, 10, 1110. [Google Scholar] [CrossRef] [Green Version]
- Fichot, C.G.; Downing, B.D.; Bergamaschi, B.A.; Windham-Myers, L.; Marvin-Dipasquale, M.; Thompson, D.R.; Gierach, M.M. High-Resolution Remote Sensing of Water Quality in the San Francisco Bay-Delta Estuary. Environ. Sci. Technol. 2016, 50, 573–583. [Google Scholar] [CrossRef]
- Wang, Z.; Chai, F.; Xue, H.; Wang, X.H.; Zhang, Y.J.; Dugdale, R.; Wilkerson, F. Light Regulation of Phytoplankton Growth in San Francisco Bay Studied Using a 3D Sediment Transport Model. Front. Mar. Sci. 2021, 8, 758. [Google Scholar] [CrossRef]
- Schraga, T.S.; Cloern, J.E. Water quality measurements in San Francisco Bay by the U.S. Geological Survey, 1969–2015. Sci. Data 2017, 4, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Schraga, T.; Nejad, E.; Martin, C.; Cloern, J. USGS Measurements of Water Quality in San Francisco Bay (CA), Beginning in 2016 (Ver. 2.0, June 2018); Technical Report; U.S. Geological Survey Data Release: Menlo Park, CA, USA, 2018. [CrossRef]
- Jassby, A.D.; Cole, B.E.; Cloern, J.E. The design of sampling transects for characterizing water quality in estuaries. Estuar. Coast. Shelf Sci. 1997, 45, 285–302. [Google Scholar] [CrossRef] [Green Version]
- Bever, A.J.; MacWilliams, M.L. Simulating sediment transport processes in San Pablo Bay using coupled hydrodynamic, wave, and sediment transport models. Mar. Geol. 2013, 345, 235–253. [Google Scholar] [CrossRef]
- Morgan-King, T.L.; Schoellhamer, D.H. Suspended-Sediment Flux and Retention in a Backwater Tidal Slough Complex near the Landward Boundary of an Estuary. Estuaries Coasts 2013, 36, 300–318. [Google Scholar] [CrossRef]
- Brando, V.E.; Lovell, J.L.; King, E.A.; Boadle, D.; Scott, R.; Schroeder, T. The potential of autonomous ship-borne hyperspectral radiometers for the validation of ocean color radiometry data. Remote Sens. 2016, 8, 150. [Google Scholar] [CrossRef] [Green Version]
- Novoa, S.; Doxaran, D.; Ody, A.; Vanhellemont, Q.; Lafon, V.; Lubac, B.; Gernez, P. Atmospheric corrections and multi-conditional algorithm for multi-sensor remote sensing of suspended particulate matter in low-to-high turbidity levels coastal waters. Remote Sens. 2017, 9, 61. [Google Scholar] [CrossRef] [Green Version]
- Nazirova, K.; Alferyeva, Y.; Lavrova, O.; Shur, Y.; Soloviev, D.; Bocharova, T.; Strochkov, A. Comparison of in situ and remote-sensing methods to determine turbidity and concentration of suspended matter in the estuary zone of the mzymta river, black sea. Remote Sens. 2021, 13, 143. [Google Scholar] [CrossRef]
- Nechad, B.; Ruddick, K.G.; Park, Y. Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters. Remote Sens. Environ. 2010, 114, 854–866. [Google Scholar] [CrossRef]
- Brockmann, C.; Doerffer, R.; Peters, M.; Stelzer, K.; Embacher, S.; Ruescas, A. Evolution of the C2RCC Neural Network for Sentinel 2 and 3 for the Retrieval of Ocean Colour Products in Normal and Extreme Optically Complex Waters. Celal Bayar Üniversitesi Sos. Bilim. Derg. 2016, 12, 1–7. [Google Scholar]
- Moses, W.J.; Ackleson, S.G.; Hair, J.W.; Hostetler, C.A.; Miller, W.D. Spatial scales of optical variability in the coastal ocean: Implications for remote sensing and in situ sampling. J. Geophys. Res. Ocean. 2016, 121, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Moses, W.J.; Bowles, J.H.; Lucke, R.L.; Corson, M.R. Impact of signal-to-noise ratio in a hyperspectral sensor on the accuracy of biophysical parameter estimation in case II waters. Opt. Express 2012, 20, 4309. [Google Scholar] [CrossRef] [PubMed]
- Davis, C.O. The San Francisco Bay Ecosystem—A Retrospective Overview. In San Francisco Bay Use and Protection; Kockelman, W.J., Conomos, T.J., Leviton, A.E., Eds.; Pacific Division; American Association for the Advancement of Science: Ashland, OR, USA, 1982; pp. 17–37. [Google Scholar]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442. [Google Scholar] [CrossRef] [PubMed]
- Berg, G.M.; Driscoll, S.; Hayashi, K.; Kudela, R. Effects of nitrogen source, concentration, and irradiance on growth rates of two diatoms endemic to northern San Francisco bay. Aquat. Biol. 2019, 28, 33–43. [Google Scholar] [CrossRef]
- Cloern, J.E.; Dufford, R. Phytoplankton community ecology: Principles applied in San Francisco Bay. Mar. Ecol. Prog. Ser. 2005, 285, 11–28. [Google Scholar] [CrossRef]
- Muller-Karger, F.E.; Hestir, E.; Ade, C.; Turpie, K.; Roberts, D.A.; Siegel, D.; Miller, R.J.; Humm, D.; Izenberg, N.; Keller, M.; et al. Satellite sensor requirements for monitoring essential biodiversity variables of coastal ecosystems. Ecol. Appl. 2018, 28, 749–760. [Google Scholar] [CrossRef]
- Werdell, P.J.; McKinna, L.I.; Boss, E.; Ackleson, S.G.; Craig, S.E.; Gregg, W.W.; Lee, Z.; Maritorena, S.; Roesler, C.S.; Rousseaux, C.S.; et al. An overview of approaches and challenges for retrieving marine inherent optical properties from ocean color remote sensing. Prog. Oceanogr. 2018, 160, 186–212. [Google Scholar] [CrossRef]
- Mouw, C.B.; Hardman-Mountford, N.J.; Alvain, S.; Bracher, A.; Brewin, R.J.W.; Bricaud, A.; Ciotti, A.M.; Devred, E.; Fujiwara, A.; Hirata, T.; et al. A Consumer’s Guide to Satellite Remote Sensing of Multiple Phytoplankton Groups in the Global Ocean. Front. Mar. Sci. 2017, 4. [Google Scholar] [CrossRef] [Green Version]
- Jensen, D.; Simard, M.; Cavanaugh, K.; Sheng, Y.; Fichot, C.G.; Pavelsky, T.; Twilley, R. Improving the Transferability of Suspended Solid Estimation in Wetland and Deltaic Waters with an Empirical Hyperspectral Approach. Remote Sens. 2019, 11, 1629. [Google Scholar] [CrossRef] [Green Version]
- Fichot, C.G.; Benner, R. The spectral slope coefficient of chromophoric dissolved organic matter (S 275–295) as a tracer of terrigenous dissolved organic carbon in river-influenced ocean margins. Limnol. Oceanogr. 2012, 57, 1453–1466. [Google Scholar] [CrossRef] [Green Version]
- Cloern, J.E.; Powell, T.M.; Huzzey, L.M. Spatial and temporal variability in South San Francisco Bay (USA). II. Temporal changes in salinity, suspended sediments, and phytoplankton biomass and productivity over tidal time scales. Estuar. Coast. Shelf Sci. 1989, 28, 599–613. [Google Scholar] [CrossRef]
- Downing-Kunz, M.A.; Work, P.A.; Schoellhamer, D.H. Correction to: Tidal Asymmetry in Ocean-Boundary Flux and In-Estuary Trapping of Suspended Sediment Following Watershed Storms: San Francisco Estuary, California, USA. Estuaries Coasts 2021, 44, 2194–2211. [Google Scholar] [CrossRef]
- Tobler, W.R. A Computer Movie Simulating Urban Growth in the Detroit Region. Econ. Geogr. 1970, 46, 234. [Google Scholar] [CrossRef]
- Pahlevan, N.; Sarkar, S.; Franz, B.A. Uncertainties in coastal ocean color products: Impacts of spatial sampling. Remote Sens. Environ. 2016, 181, 14–26. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Source | Atmospheric Correction | Retrieval Strategy | April Error (mg/L) | June Error (mg/L) |
|---|---|---|---|---|
| HydroRad | n/a | single-band [19] | 20.72 | 15.35 |
| Sentinel-2 MSI | ESA standard correction to Level 2A surface reflectance | single-band [19] | 110.48 | 45.85 |
| C2RCC correction ([20]) | single-band [19] | 18.42 | 28.46 | |
| C2RCC ([20]) | 24.79 | 25.61 |
| Variable | April | June | October |
|---|---|---|---|
| Min [SPM] | 3.0 | 0.011 | 0.50 |
| Max [SPM] | 152.6 | 148.8 | 46.7 |
| Mean [SPM] | 46.3 | 47.8 | 9.1 |
| SD [SPM] | 44.9 | 36.1 | 4.9 |
| Median [SPM] | 25.0 | 32.5 | 7.1 |
| Delta Flow (cfs) | 68,464 | 66,005 | 15,845 |
| Tidal Height (m) | 1.6 | 0.55 | 0.55 |
| Wind Speed (m/s) | 7.7 | 0.50 | 1.3 |
| Region | April | June | October | Average |
|---|---|---|---|---|
| North | 140 | 110 | 100 | 117 |
| Central | 210 | 130 | 70 | 137 |
| South | 230 | 180 | 110 | 173 |
| Full | 210 | 170 | 100 | 160 |
| North | 620 | 340 | 390 | 450 |
| Central | 1740 | 490 | 450 | 893 |
| South | 1190 | 530 | 370 | 697 |
| Full | 920 | 460 | 420 | 600 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taylor, N.C.; Kudela, R.M. Spatial Variability of Suspended Sediments in San Francisco Bay, California. Remote Sens. 2021, 13, 4625. https://doi.org/10.3390/rs13224625
Taylor NC, Kudela RM. Spatial Variability of Suspended Sediments in San Francisco Bay, California. Remote Sensing. 2021; 13(22):4625. https://doi.org/10.3390/rs13224625
Chicago/Turabian StyleTaylor, Niky C., and Raphael M. Kudela. 2021. "Spatial Variability of Suspended Sediments in San Francisco Bay, California" Remote Sensing 13, no. 22: 4625. https://doi.org/10.3390/rs13224625