
Influence of Storm Tidal Current Field and Sea Bottom Slope on Coastal Ocean Waves during Typhoon Malakas

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Analytic Model Derivation
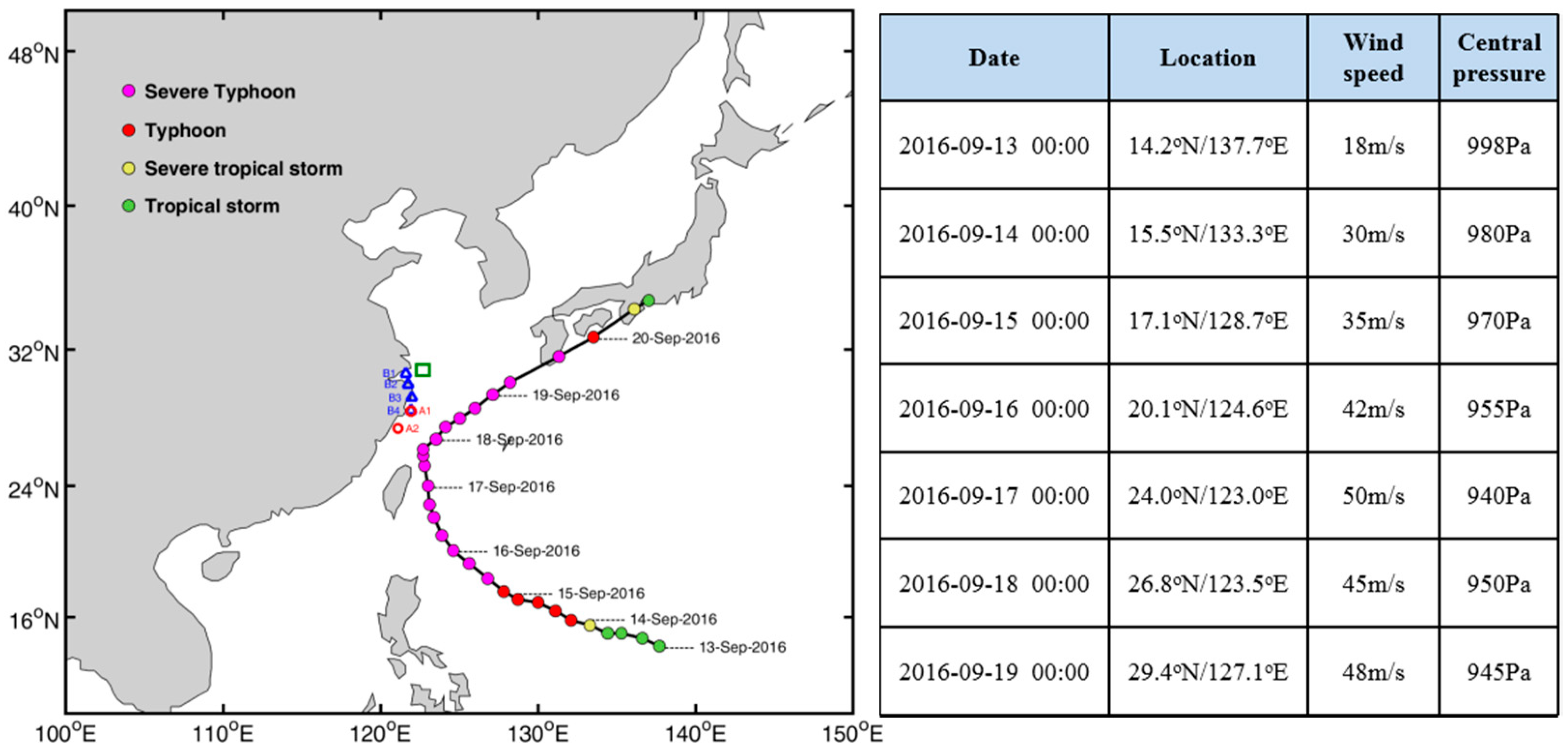
2.2. Ocean Data
2.2.1. Model Description
2.2.2. Model Validation
3. Results
3.1. Results of Theoretical Analysis
3.1.1. Analysis for Main Characteristic Wave Component
3.1.2. Analysis for All Wave Components
3.2. Results of Shengsi Area
3.2.1. Analysis for Main Characteristic Wave Component
3.2.2. Analysis for All Wave Components
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Tolman, H.L. A third-generation model for wind-waves on slowly varying, unsteady, and inhomogeneous depths and currents. J. Phys. Oceanogr. 1991, 21, 782–797. [Google Scholar] [CrossRef]
- Yuan, Y.L.; Qiao, F.L.; Yin, X.Q.; Han, L.; Lu, M. Establishment of the ocean dynamic system with four sub-systems and the derivation of their governing equation sets. J. Hydrodyn. 2012, 24, 153–168. [Google Scholar] [CrossRef]
- Viitak, M.; Maljutenko, I.; Alari, V.; Suursaar, Ü.; Rikka, S.; Lagemaa, P. The impact of surface currents and sea level on the wave field evolution during St. Jude storm in the eastern Baltic Sea. Oceanologia 2016, 58, 176–186. [Google Scholar] [CrossRef] [Green Version]
- Prakash, K.R.; Pant, V. On the wave-current interaction during the passage of a tropical cyclone in the bay of bengal. Deep Sea Res. Part II Top. Stud. Oceanogr. 2019, 172, 104658. [Google Scholar] [CrossRef]
- Song, H.L.; Kuang, C.P.; Wang, X.H.; Ma, Z. Wave-current interactions during extreme weather conditions in southwest of Bohai Bay, China. Ocean Eng. 2020, 216, 108068. [Google Scholar] [CrossRef]
- Cavaleri, L.; Fox-Kemper, B.; Hemer, M. Wind waves in the coupled climate system. Bull. Am. Meteorol. Soc. 2012, 93, 1651–1661. [Google Scholar] [CrossRef]
- Unna, P.J. White horses. Nature 1941, 148, 226–227. [Google Scholar] [CrossRef]
- Unna, P.J. Waves and tidal streams. Nature 1942, 149, 219–220. [Google Scholar] [CrossRef]
- Unna, P.J. Sea waves. Nature 1947, 159, 239–242. [Google Scholar] [CrossRef]
- Barber, N.F. The behaviour of waves on tidal streams. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1949, 198, 81–93. [Google Scholar] [CrossRef] [Green Version]
- Longuet-Higgins, M.S.; Stewart, R.W. Changes in the form of short gravity waves on long waves and tidal currents. J. Fluid Mech. 1960, 8, 565. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Stewart, R.W. The changes in amplitude of short gravity waves on steady non-uniform currents. J. Fluid Mech. 1961, 10, 529. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Stewart, R.W. Radiation stress and mass transport in gravity waves, with application to ‘surf beats’. J. Fluid Mech. 1962, 13, 481. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Stewart, R.W. Radiation stresses in water waves—A physical discussion, with applications. Deep Sea Res. 1964, 11, 529–562. [Google Scholar] [CrossRef]
- Whitham, G.B. A general approach to linear and non-linear dispersive waves using a Lagrangian. J. Fluid Mech. 1965, 22, 273. [Google Scholar] [CrossRef]
- Bretherton, F.P.; Garrett, C. Wavetrains in inhomogeneous moving media. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1968, 302, 529–554. [Google Scholar] [CrossRef]
- Whitham, G.B. Linear and Nonlinear Waves; Wiley: New York, NY, USA, 1974. [Google Scholar]
- Phillips, O.M. The Dynamics of the Upper Ocean, 2nd ed.; Cambridge University Press: Cambridge, UK, 1977. [Google Scholar]
- Mei, C.C. The Applied Dynamics of Ocean Surface Waves; Wiley: New York, NY, USA, 1983. [Google Scholar]
- Dingemans, M.W. Water Wave Propagation Over Uneven Bottoms; World Scientific: London, UK, 1997. [Google Scholar]
- Mellor, G.L. The three-dimensional current and surface wave equations. J. Phys. Oceanogr. 2003, 33, 1978–1989. [Google Scholar] [CrossRef]
- Mellor, G.L. The depth-dependent current and wave interaction equations: A revision. J. Phys. Oceanogr. 2008, 38, 2587–2596. [Google Scholar] [CrossRef]
- Mellor, G.L. A combined derivation of the integrated and vertically resolved, coupled wave-current equations. J. Phys. Oceanogr. 2015, 45, 1453–1463. [Google Scholar] [CrossRef]
- Ji, C.; Zhang, Q.H.; Wu, Y.S. Derivation of three-dimensional radiation stress based on Lagrangian solutions of progressive waves. J. Phys. Oceanogr. 2017, 47, 2829–2842. [Google Scholar] [CrossRef]
- McWilliams, J.C.; Restrepo, J.M. The wave-driven ocean circulation. J. Phys. Oceanogr. 1999, 29, 2523–2540. [Google Scholar] [CrossRef]
- Uchiyama, Y.; McWilliams, J.C.; Shchepetkin, A.F. Wave-current interaction in an oceanic circulation model with a vortex-force formalism: Application to the surf zone. Ocean Model. 2010, 34, 16–35. [Google Scholar] [CrossRef]
- Bennis, A.C.; Ardhuin, F.; Dumas, F. On the coupling of wave and three-dimensional circulation models: Choice of theoretical framework, practical implementation and adiabatic tests. Ocean Model. 2011, 40, 260–272. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N.; Voulgaris, G.; Warner, J.C.; Olabarrieta, M. Implementation of the vortex force formalism in the coupled ocean-atmosphere-wave-sediment transport (COAWST) modeling system for inner shelf and surf zone applications. Ocean Model. 2012, 47, 65–95. [Google Scholar] [CrossRef]
- Yuan, Y.L.; Qiao, F.L.; Hua, F.; Wan, Z. The development of a coastal circulation numerical model: Ⅰ. Wave-induced mixing and wave-current interaction. J. Hydrodyn. Ser. A 1999, 14, 1–8. [Google Scholar]
- Yang, Y.Z.; Qiao, F.L.; Xia, C.S.; Ma, J.; Yuan, Y.L. Wave-induced mixing in the Yellow Sea. Chin. J. Oceanol. Limnol. 2004, 22, 322–326. [Google Scholar] [CrossRef]
- Qiao, F.L.; Yuan, Y.L.; Yang, Y.Z.; Zheng, Q.A.; Xia, C.S.; Ma, J. Wave-induced mixing in the upper ocean: Distribution and application to a global ocean circulation model. Geophys. Res. Lett. 2004, 31, L11303. [Google Scholar] [CrossRef]
- Deltares. SWAN Scientific and Technical Documentation; Deltares: Delft, The Netherlands, 2021. [Google Scholar]
- Günther, H.; Hasselmann, S.; Janssen, P.A.E.M. The WAM Model Cycle 4; Deutsches Klimarechenzentrum (DKRZ): Hamburg, Germany, 1992. [Google Scholar]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions: 1. Model description and validation. J. Geophys. Res. Ocean. 1999, 104, 7649–7666. [Google Scholar] [CrossRef] [Green Version]
- Yuan, Y.L.; Pan, Z.D.; Hua, F.; Sun, L.T. LAGFD-WAM wave numerical model (I), the basic physical model. Acta Oceanol. Sin. 1992, 14, 1–7. [Google Scholar]
- Yuan, Y.L.; Hua, F.; Pan, Z.D.; Sun, L.T. LAGFD-WAM numerical wave model-II. Characteristics inlaid scheme and its application. Acta Oceanol. Sin. 1992, 14, 12–24. [Google Scholar]
- Yang, Y.L.; Qiao, F.L.; Zhao, W.; Teng, Y.; Yuan, Y.L. MASNUM ocean wave numerical model in spherical coordinates and its application. Acta Oceanol. Sin. 2005, 27, 1–7. [Google Scholar] [CrossRef]
- Shemdin, P.; Hasselmann, K.; Hsiao, S.V.; Herterich, K. Non-linear and linear bottom interaction effects in shallow water. In Turbulent Fluxes through the Sea Surface, Wave Dynamics, and Prediction; Springer: Boston, MA, USA, 1978; Volume 1, pp. 347–372. [Google Scholar] [CrossRef]
- Bertotti, L.; Cavaleri, L. Accuracy of wind and wave evaluation in coastal regions. In Proceedings of the 24th International Conference on Coastal Engineering, Kobe, Japan, 23–28 October 1994. [Google Scholar] [CrossRef]
- Gorrell, L.; Raubenheimer, B.; Elgar, S.; Guza, R.T. SWAN predictions of waves observed in shallow water onshore of complex bathymetry. Coast. Eng. 2011, 58, 510–516. [Google Scholar] [CrossRef]
- Yuan, Y.L.; Han, L.; Qiao, F.L.; Yang, Y.Z.; Lu, M. A unified linear theory of wavelike perturbations under general ocean conditions. Dyn. Atmos. Oceans 2011, 51, 55–74. [Google Scholar] [CrossRef]
- Chen, X.G.; Wang, J.L.; Cukrov, N.; Du, J.Z. Porewater-derived nutrient fluxes in a coastal aquifer (Shengsi Island, China) and its implication. Estuar. Coast. Shelf Sci. 2019, 218, 204–211. [Google Scholar] [CrossRef]
- ADCIRC. Available online: https://adcirc.org/ (accessed on 17 July 2020).
- Feng, X.R.; Li, M.J.; Yin, B.S.; Yang, D.Z.; Yang, H.M. Study of storm surge trends in typhoon-prone coastal areas based on observations and surge-wave coupled simulations. Int. J. Appl. Earth Obs. Geoinf. 2018, 68, 272–278. [Google Scholar] [CrossRef]
- Li, T.; Wang, F.D.; Hou, J.M.; Che, Z.M.; Dong, J.X. Validation of an operational forecasting system of sea dike risk in the southern Zhejiang Province, South China. J. Oceanol. Limnol. 2019, 37, 1929–1940. [Google Scholar] [CrossRef]
- Wang, Y.P.; Liu, Y.L.; Mao, X.Y.; Chi, Y.T.; Jiang, W.S. Long-term variation of storm surge-associated waves in the Bohai Sea. J. Oceanol. Limnol. 2019, 37, 1868–1878. [Google Scholar] [CrossRef]
- Yang, W.K.; Feng, X.R.; Yin, B.S. The impact of coastal reclamation on tidal and storm surge level in Sanmen Bay, China. J. Oceanol. Limnol. 2019, 37, 1971–1982. [Google Scholar] [CrossRef]
- Zhang, W.S.; Teng, L.; Zhang, J.S.; Xiong, M.J.; Yin, C.T. Numerical study on eff ect of tidal phase on storm surge in the South Yellow Sea. J. Oceanol. Limnol. 2019, 37, 2037–2055. [Google Scholar] [CrossRef]
- Cavaleri, L.; Malanotte-Rizzoli, P. Wind wave prediction in shallow water: Theory and applications. J. Geophys. Res. 1981, 86, 10961–10973. [Google Scholar] [CrossRef]
- Janssen, P.A.E.M. Quasi-linear theory of wind-wave generation applied to wave forecasting. J. Phys. Oceanogr. 1991, 21, 1631–1642. [Google Scholar] [CrossRef] [Green Version]
- Weather China. Available online: http://www.weather.com.cn/ (accessed on 17 July 2020).
- Sun, X.P. China Offshore Regional Oceans; Ocean Press: Beijing, China, 2006. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters of SWAN | Calibrated Model Setting in the Study Domain |
|---|---|
| Nonlinear wave–wave interactions | In deep water, quadruplet wave–wave interactions. In shallow water, quadruplet and triad wave–wave interactions. |
| Bottom-induced dissipation | Bertotti and Cavaleri, 1994 [39]. |
| Wind input source | Cavaleri and Malanotte-Rizzoli, 1981 [49]; Jassen, 1991 [50]. |
| Others | Default. |
| Parameters of ADCIRC | Calibrated Model Setting in the Study Domain |
|---|---|
| Bottom friction coefficient | 0.002. |
| Open boundary | Eight tidal constituents from the global tidal model TPXO7.2 (M2, S2, N2, K2, K1, O1, P1 and Q1). |
| Others | Default. |
| ID | Longitude | Latitude | Root Mean Square Error | ||
|---|---|---|---|---|---|
| SWH (m) | Wave Period (s) | Water Level (cm) | |||
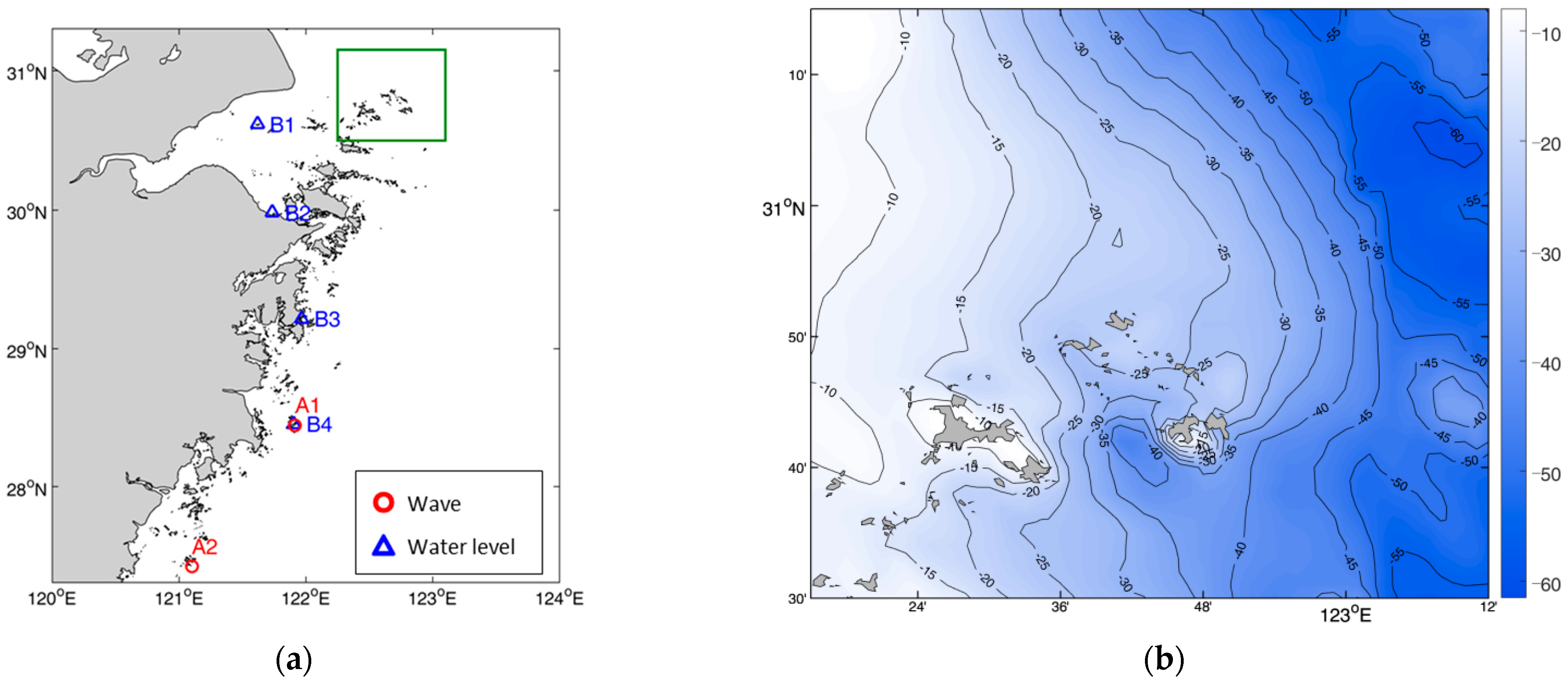
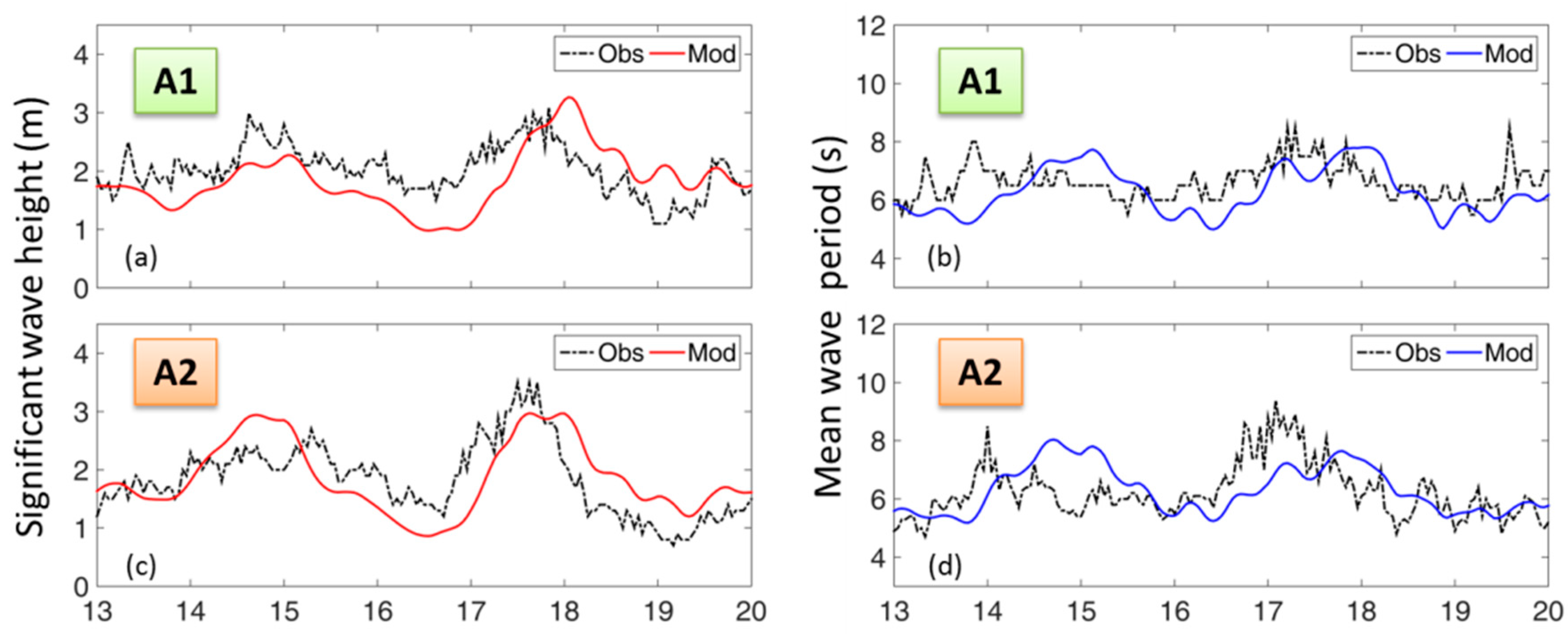
| A1 | 121.91°E | 28.44°N | 0.54 | 0.91 | -- |
| A2 | 121.10°E | 27.41°N | 0.53 | 1.00 | -- |
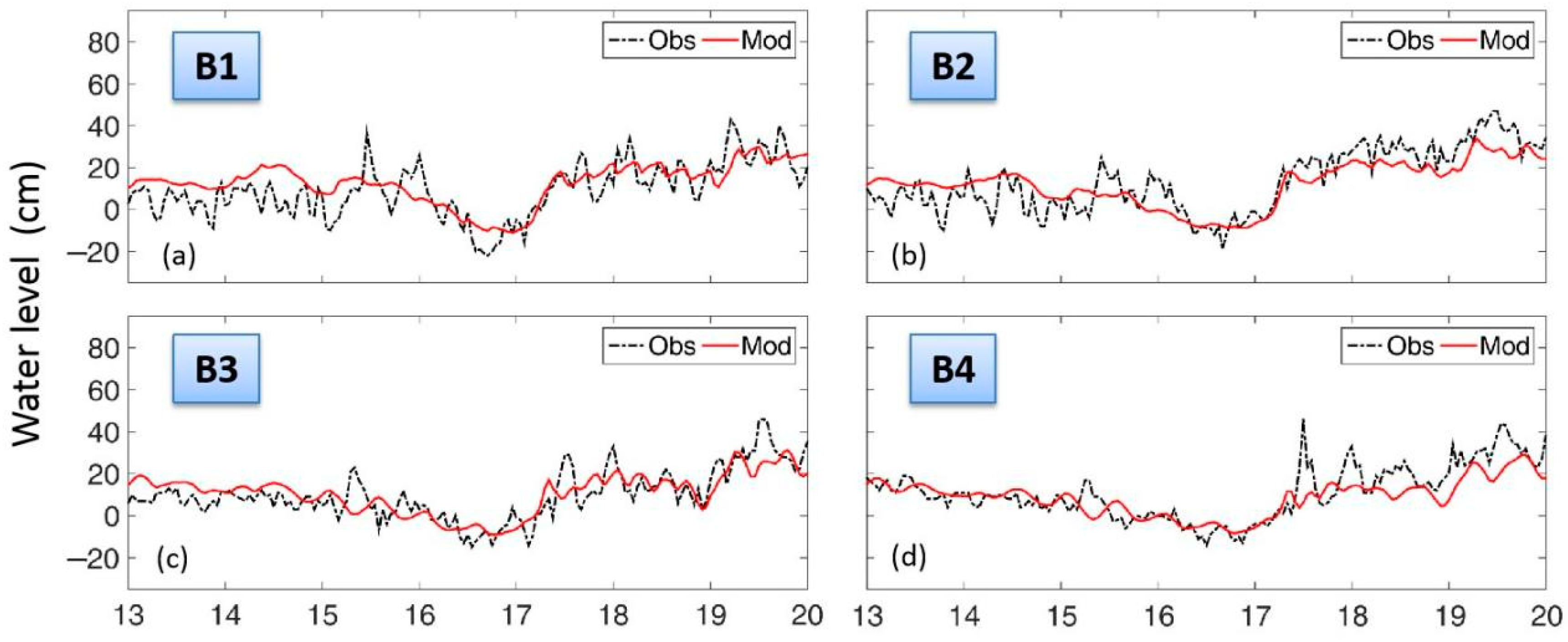
| B1 | 121.61°E | 30.61°N | -- | -- | 9.58 |
| B2 | 121.73°E | 29.98°N | -- | -- | 8.92 |
| B3 | 121.96°E | 29.21°N | -- | -- | 7.77 |
| B4 | 121.90°E | 28.45°N | -- | -- | 8.10 |
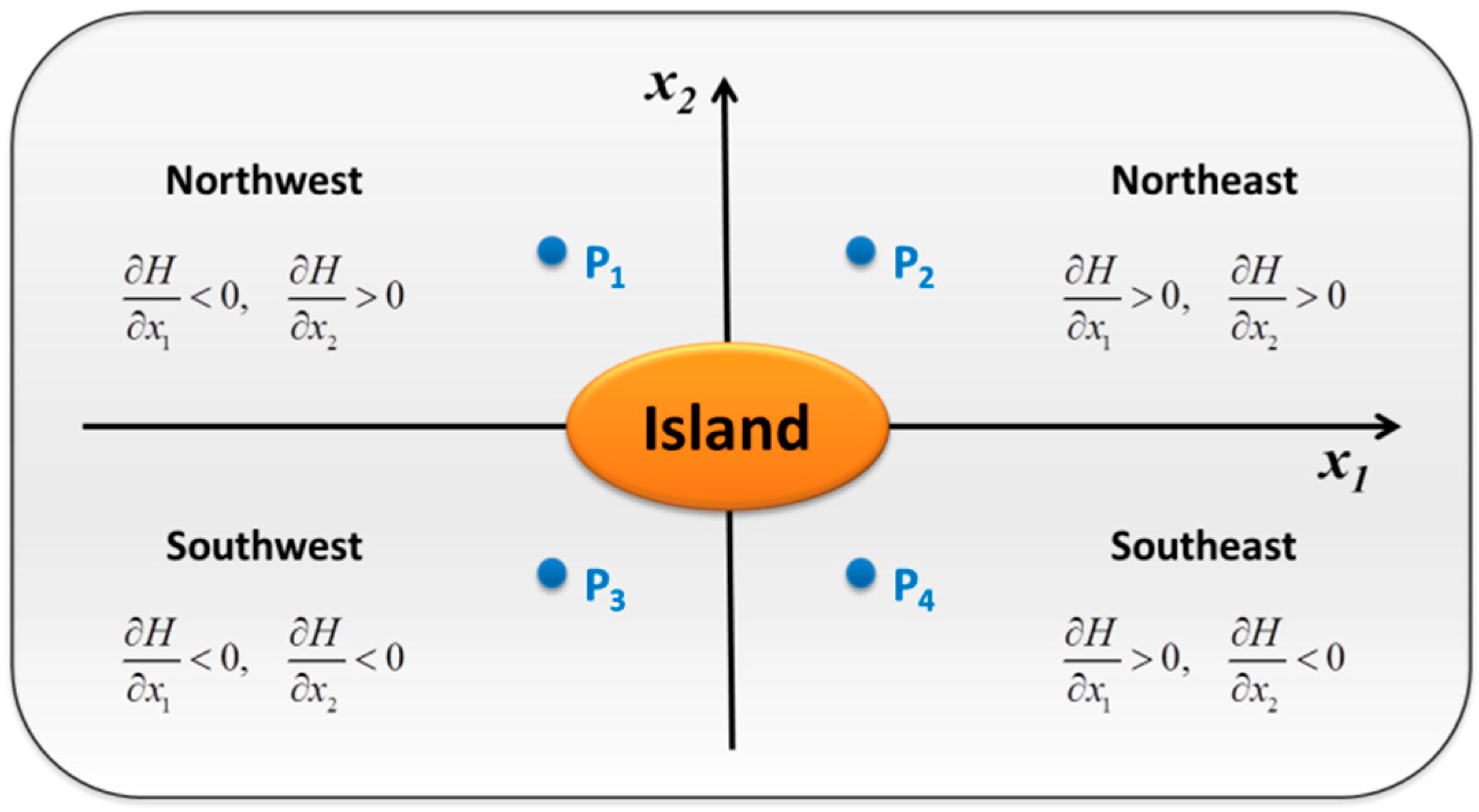
| Bottom Slope | P1 | P2 | P3 | P4 |
|---|---|---|---|---|
| −0.5 | 0.5 | −0.5 | 0.5 | |
| 0.5 | 0.5 | −0.5 | −0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Yang, Y.; Chi, Y.; Sun, T.; Shi, Y.; Rong, Z. Influence of Storm Tidal Current Field and Sea Bottom Slope on Coastal Ocean Waves during Typhoon Malakas. Remote Sens. 2021, 13, 4722. https://doi.org/10.3390/rs13224722
Sun M, Yang Y, Chi Y, Sun T, Shi Y, Rong Z. Influence of Storm Tidal Current Field and Sea Bottom Slope on Coastal Ocean Waves during Typhoon Malakas. Remote Sensing. 2021; 13(22):4722. https://doi.org/10.3390/rs13224722
Chicago/Turabian StyleSun, Meng, Yongzeng Yang, Yutao Chi, Tianqi Sun, Yongfang Shi, and Zengrui Rong. 2021. "Influence of Storm Tidal Current Field and Sea Bottom Slope on Coastal Ocean Waves during Typhoon Malakas" Remote Sensing 13, no. 22: 4722. https://doi.org/10.3390/rs13224722
APA StyleSun, M., Yang, Y., Chi, Y., Sun, T., Shi, Y., & Rong, Z. (2021). Influence of Storm Tidal Current Field and Sea Bottom Slope on Coastal Ocean Waves during Typhoon Malakas. Remote Sensing, 13(22), 4722. https://doi.org/10.3390/rs13224722