
Harnessing Machine Learning Techniques for Mapping Aquaculture Waterbodies in Bangladesh


 , ,
, ,  , ,
, , 

Abstract
:1. Introduction
2. Materials and Methods
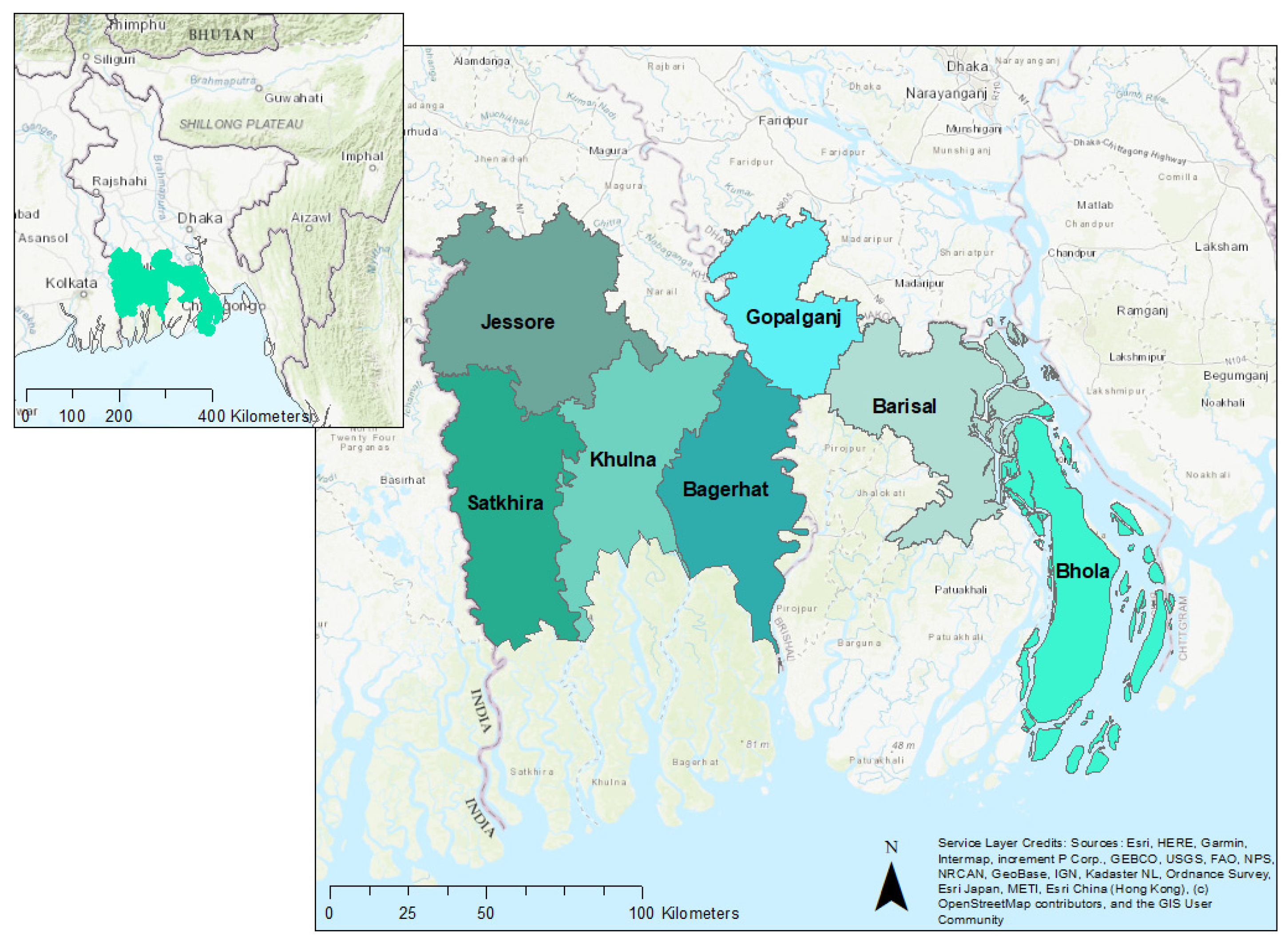
2.1. Study Area
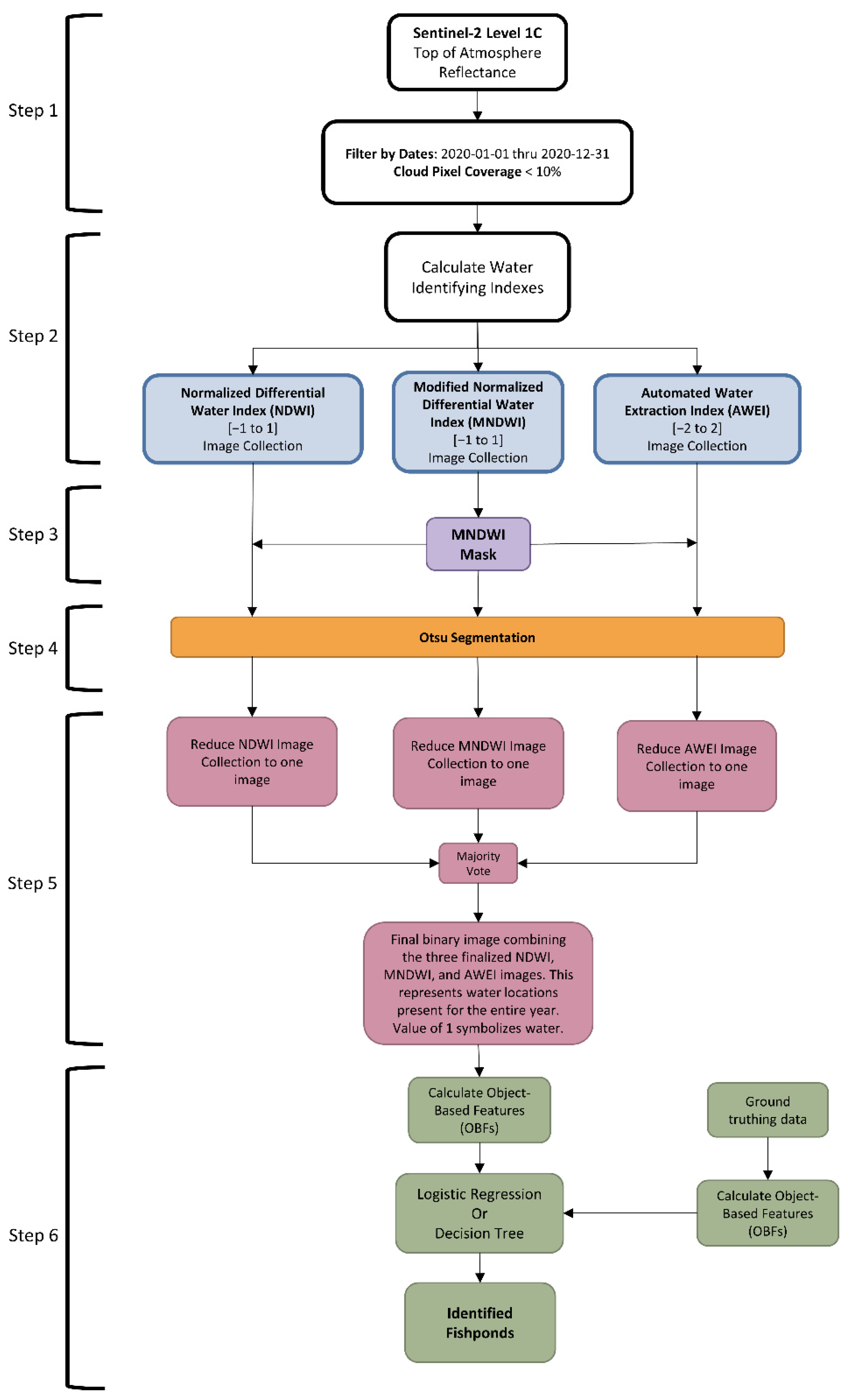
2.2. Overview of the Base Method
2.3. Proposed Improvements
2.4. Overview of the Base Method
- (1)
- The number of ground truthing fishponds that are correctly identified;
- (2)
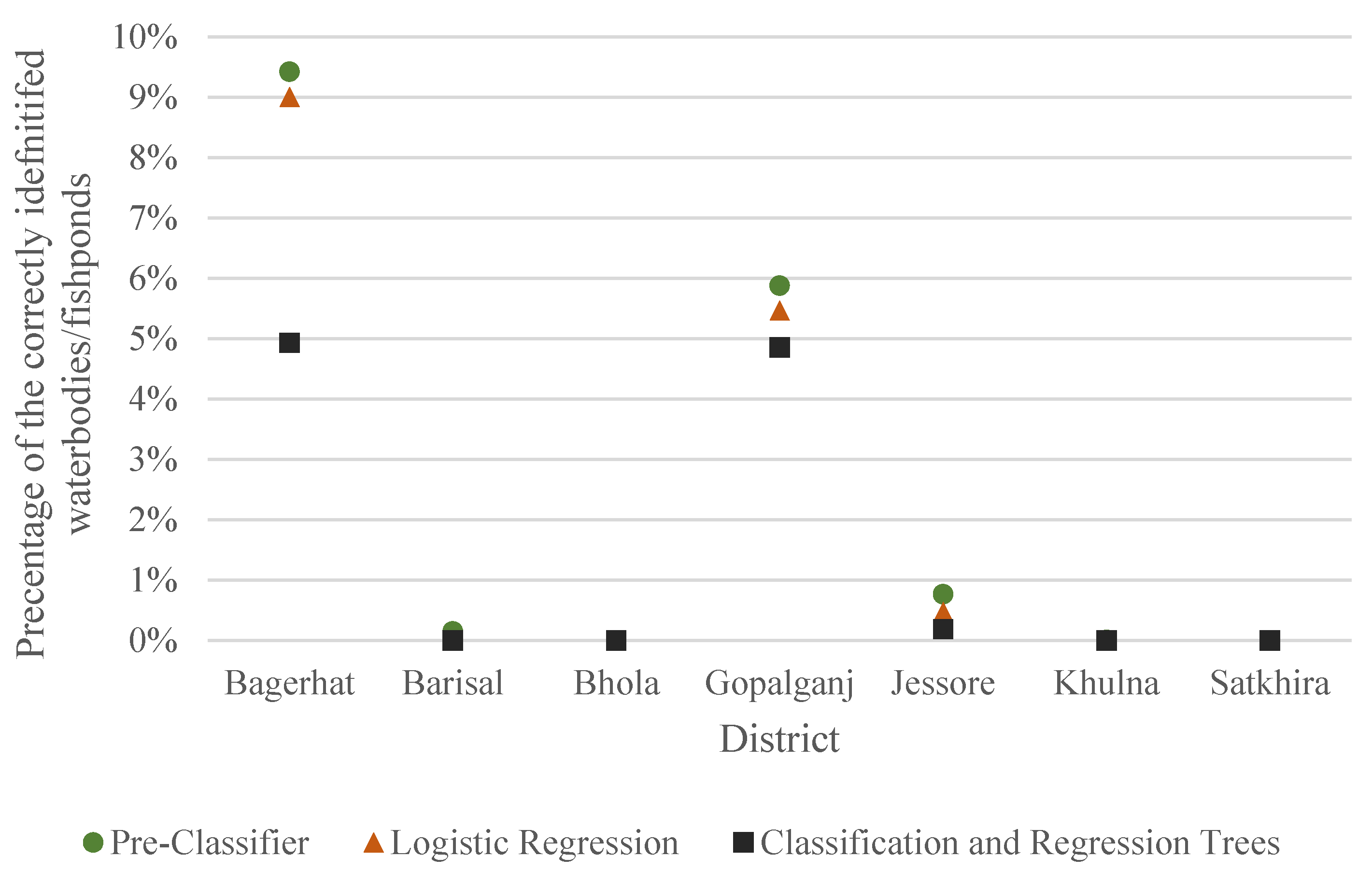
- The percentage of the ground truthing area that is correctly identified by the classifier;
- (3)
- The number of fishponds classified;
- (4)
- The recall: Recall is the ratio of true positive fishponds to the total of all known fishponds, whether true positive or false negative Equation (1);
- (5)
- The precision: Precision is the ratio of true positive fishponds to all identified fishponds, whether true positive or false positive Equation (2);
- (6)
- The F1 score: The F1 score Equation (3) is the harmonic mean of the recall and precision and is used to provide a more insightful characteristic of performance than the arithmetic mean [52].
3. Results
3.1. Base Method Performance Evaluation within the Study Area in Detecting Waterbodies and Fishponds
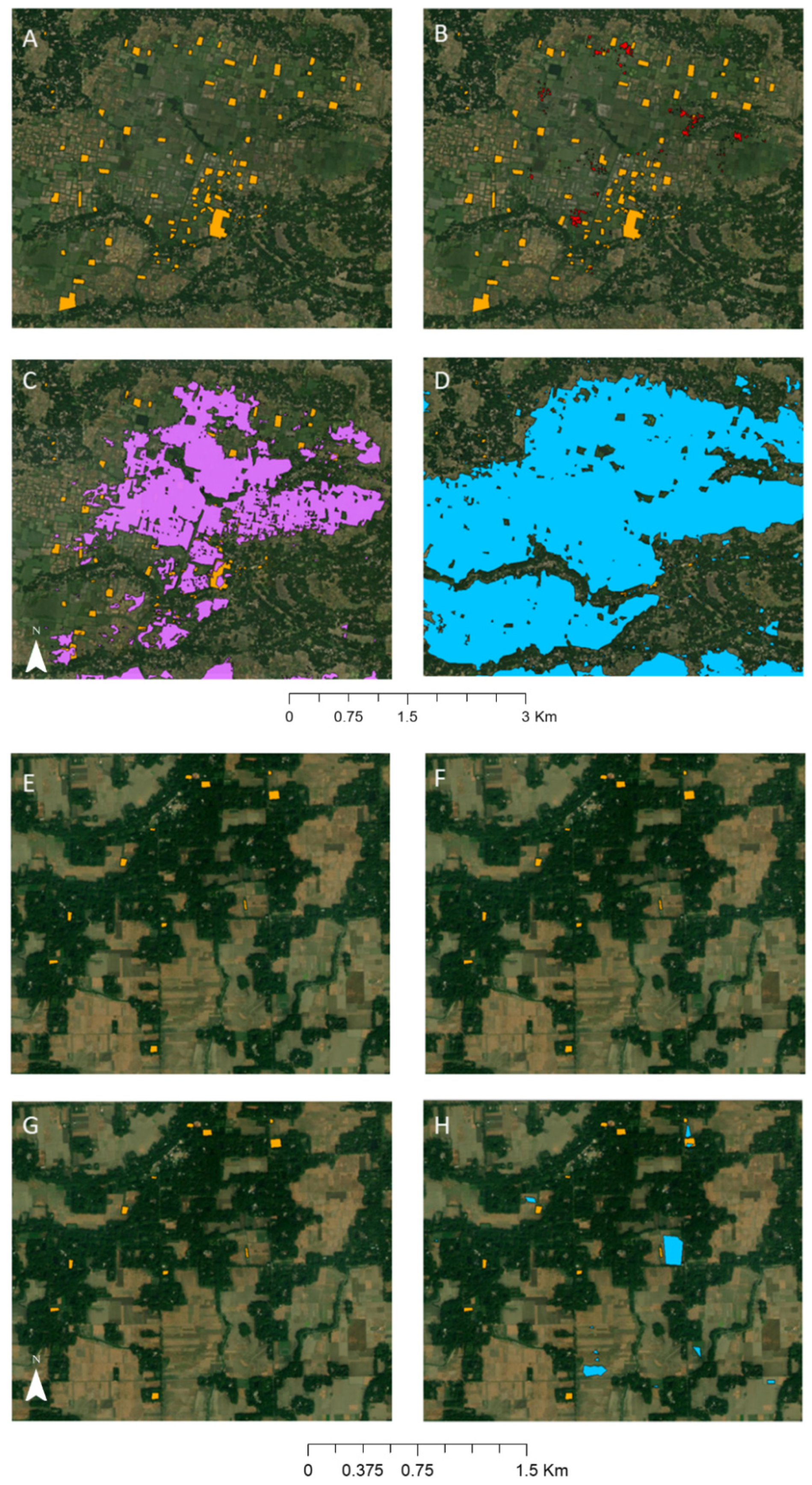
3.2. Identifying the Best Period of Image Collection for Detecting Fishponds (Improvement 1)
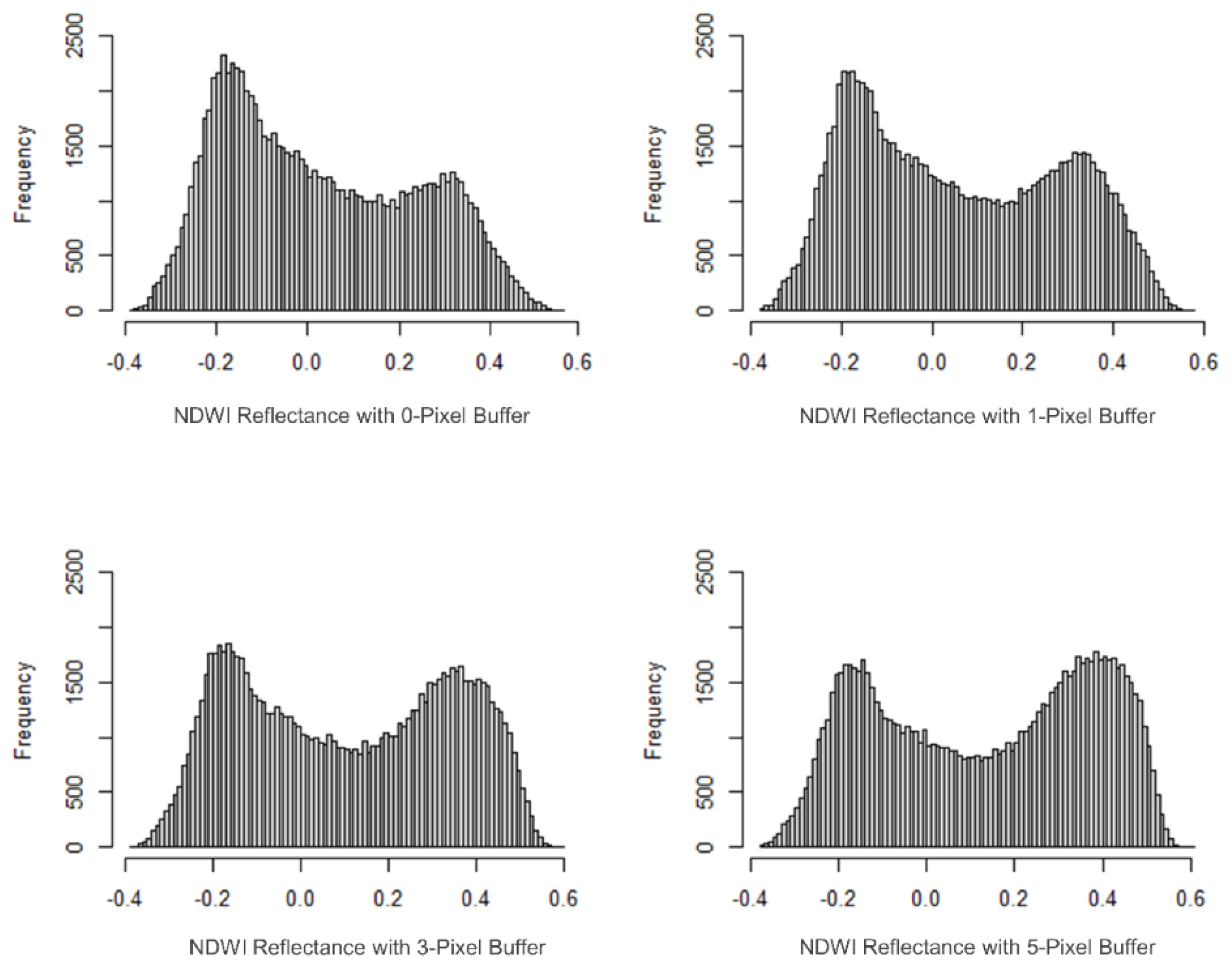
3.3. Testing the Buffer Size for Threshold Optimization (Improvement 2)
3.4. Determining the Combination of Image Reducer and Water-Identifying Index to Improve Waterbody and Fishpond Detection (Improvement 3)
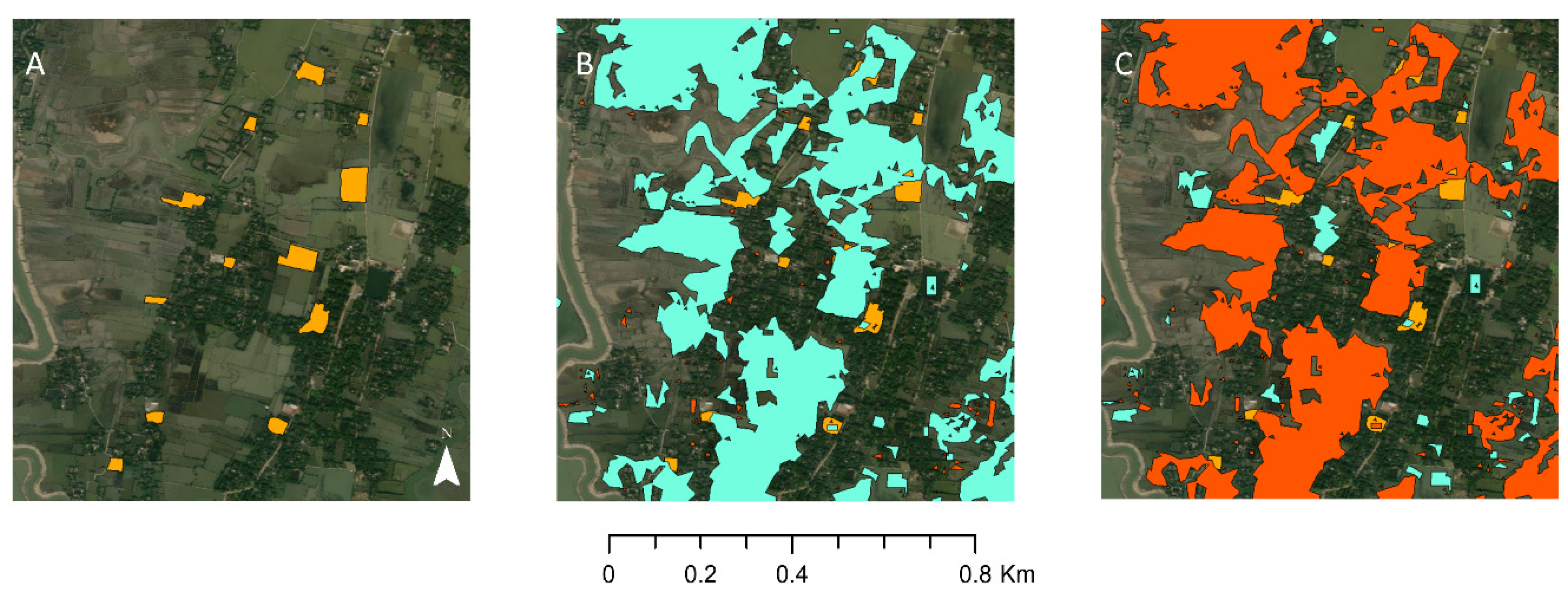
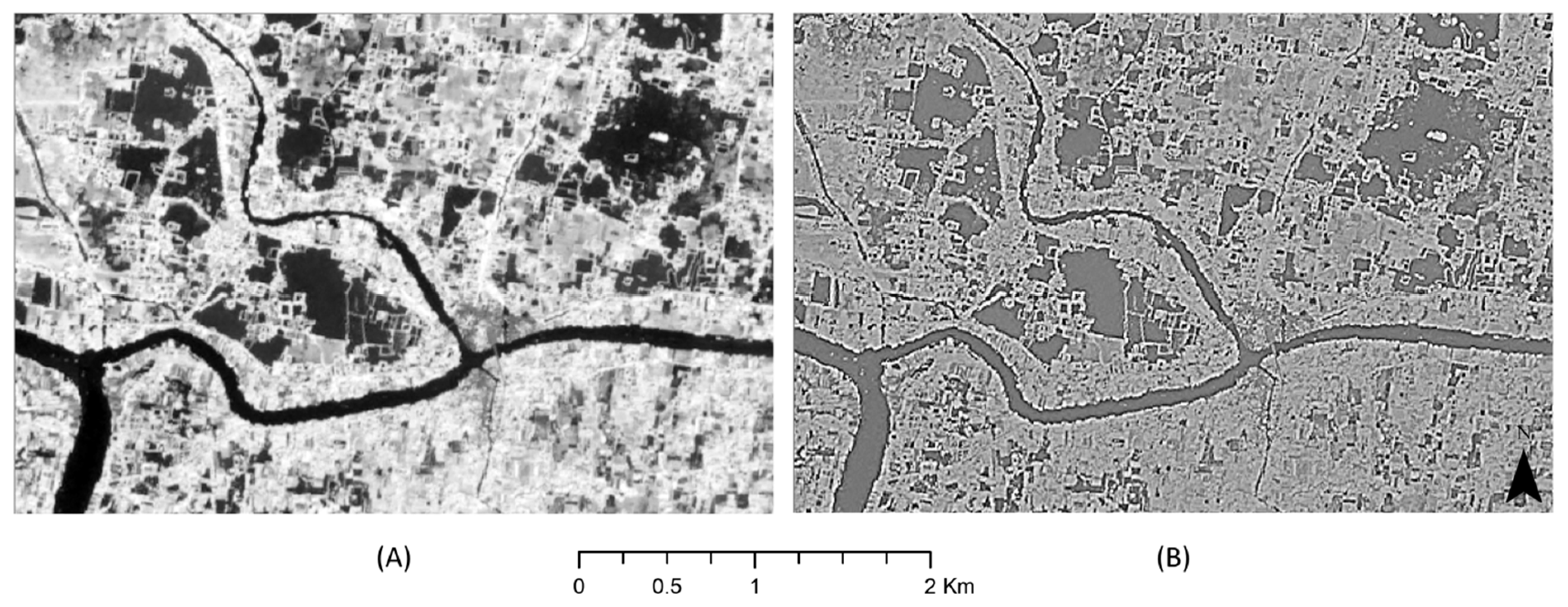
3.5. Implementing Edge Detection with a Convolution Filter to Improve Fishpond Boundary Detection (Improvement 4)
3.6. Evaluating the Impact of Ground Truthing Data on Machine Learning Training (Improvement 5)
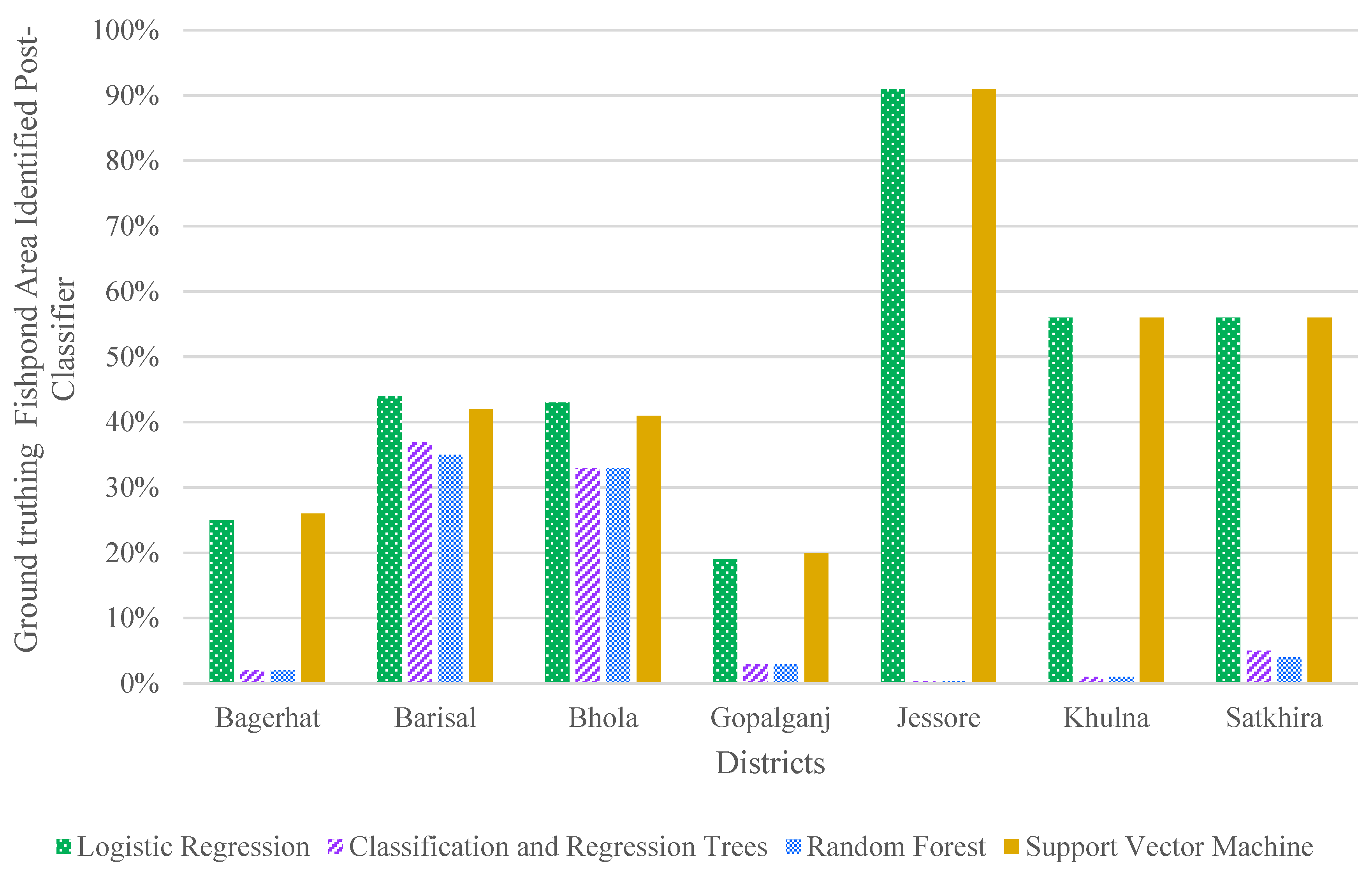
3.7. Adding Random Forest and Support Vector Machine Classifiers to Determine the Best Classifier for the Data (Improvement 6)
3.8. Determining the Extent to Which the Improvements Works
3.9. High-Resolution Imagery Impacts on Results
4. Discussion
4.1. Implications of the Base Method
4.2. Single Day as Best Time Period
4.3. Image Reducer and Index Combination Comparisions
4.4. Introducing Edge Detection with a Laplacian Convolution Filter
4.5. Creating Training Datasets from Ground Truthing Surveys and Identifying the Best Classifier for Fishpond Classification
4.6. Land Use and Ground Truth Fishpond Characteristics to Explain Trends in Results
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. The State of World Fisheries and Aquaculture; FAO: Rome, Italy, 2020. [Google Scholar]
- Kobayashi, M.; Msangi, S.; Batka, M.; Vannuccini, S.; Dey, M.M.; Anderson, J.L. Fish to 2030: The role and opportunity for aquaculture. Aquac. Econ. Manag. 2015, 19, 282–300. [Google Scholar] [CrossRef] [Green Version]
- Bernzen, A.; Pritchard, B.; Braun, B.; Belton, B.; Rigg, J. Guest editorial: Geographies of engagement, livelihoods and possibility in South and Southeast Asian deltas. Singap. J. Trop. Geogr. 2021, 42, 197–202. [Google Scholar] [CrossRef]
- Belton, B.; Bush, S.R.; Little, D.C. Not just for the wealthy: Rethinking farmed fish consumption in the Global South. Glob. Food Sec. 2018, 16, 85–92. [Google Scholar] [CrossRef]
- Hernandez, R.; Belton, B.; Reardon, T.; Hu, C.; Zhang, X.; Ahmed, A. The “quiet revolution” in the aquaculture value chain in Bangladesh. Aquaculture 2018, 493, 456–468. [Google Scholar] [CrossRef]
- Department of Fisheries. Yearbook of Fisheries Statistics of Bangladesh 2017–18; Department of Fisheries: Dhaka, Bangladesh, 2018.
- Jahan, K.; Belton, B.; Ali, H.; Dhar, G.; Ara, I. Aquaculture Technologies in Bangladesh: An Assessment of Technical and Economic Performance and Producer Behavior; WorldFish: Penang, Malaysia, 2015. [Google Scholar]
- Belton, B.; Azad, A. The characteristics and status of pond aquaculture in Bangladesh. Aquaculture 2012, 358, 196–204. [Google Scholar] [CrossRef]
- Yu, Z.; Di, L.; Tang, J.; Zhang, C.; Lin, L.; Yu, E.G.; Rahman, M.S.; Gaigalas, J.; Sun, Z. Land use and land cover classification for Bangladesh 2005 on google earth engine. In Proceedings of the International Conference on Agro-Geoinformatics, Hangzhou, China, 6–9 August 2018; Institute of Electrical and Electronics Engineers Inc.: Manhattan, NY, USA, 2018. [Google Scholar]
- Hashem, S.; Akter, T.; Salam, M.A.; Hasan, M.T. Aquaculture planning through remote sensing image analysis and GIS tools in Northeast region, Bangladesh. Int. J. Fish. Aquat. Stud. 2014, 1, 127–136. [Google Scholar]
- Rhodes, C.J.; Henrys, P.; Siriwardena, G.M.; Whittingham, M.J.; Norton, L.R. The relative value of field survey and remote sensing for biodiversity assessment. Methods Ecol. Evol. 2015, 6, 772–781. [Google Scholar] [CrossRef]
- Anand, A.; Krishnan, P.; Kantharajan, G.; Suryavanshi, A.; Kawishwar, P.; Raj, U.; Rao, C.S.; Choudhury, S.B.; Manjulatha, C.; Babu, D.E. Assessing the water spread area available for fish culture and fish production potential in inland lentic waterbodies using remote sensing: A case study from Chhattisgarh State, India. Remote Sens. Appl. Soc. Environ. 2020, 17, 100273. [Google Scholar] [CrossRef]
- Ottinger, M.; Clauss, K.; Kuenzer, C. Aquaculture: Relevance, distribution, impacts and spatial assessments—A review. Ocean Coast. Manag. 2016, 119, 244–266. [Google Scholar] [CrossRef]
- NASA Get to Know SAR–NASA-ISRO SAR Mission (NISAR). Available online: https://nisar.jpl.nasa.gov/mission/get-to-know-sar/overview/ (accessed on 23 July 2020).
- Woodhouse, I.H. Introduction to Microwave Remote Sensing; Taylor & Francis Group: Abingdon, UK, 2017. [Google Scholar]
- Coffey, V.C. Multispectral Imaging Moves into the Mainstream. Available online: https://www.osa-opn.org/home/articles/volume_23/issue_4/features/multispectral_imaging_moves_into_the_mainstream/ (accessed on 24 July 2020).
- Earth Observing System Satellite Data: What Spatial Resolution is Enough for You? Available online: https://eos.com/blog/satellite-data-what-spatial-resolution-is-enough-for-you/ (accessed on 8 June 2021).
- Bello, O.M.; Aina, Y.A. Satellite remote sensing as a tool in disaster management and sustainable development: Towards a synergistic approach. Procedia Soc. Behav. Sci. 2014, 120, 365–373. [Google Scholar] [CrossRef] [Green Version]
- Zoran, L.F.V.; Ionescu Golovanov, C.; Zoran, M.A. Spectral characteristics and feature selection of satellite remote sensing data for land use/cover changes assessment in the Romanian northwestern Black Sea coastal area. In Proceedings of the Earth Resources and Environmental Remote Sensing/GIS Applications, Toulouse, France, 20–23 September 2010; Volume 7831, p. 78311P. [Google Scholar]
- Ottinger, M.; Clauss, K.; Kuenzer, C. Opportunities and challenges for the estimation of aquaculture production based on earth observation data. Remote Sens. 2018, 10, 1076. [Google Scholar] [CrossRef] [Green Version]
- Prasad, K.A.; Ottinger, M.; Wei, C.; Leinenkugel, P. Assessment of coastal aquaculture for India from Sentinel-1 SAR time series. Remote Sens. 2019, 11, 357. [Google Scholar] [CrossRef] [Green Version]
- Ballester-Berman, D.J.; Sanchez-Jerez, P.; Marino, A. Detection of aquaculture structures using Sentinel-1 data. In Proceedings of the European Conference on Synthetic Aperture Radar, Aachen, Germany, 5–7 June 2018; pp. 888–891. [Google Scholar]
- Yu, Z.; Di, L.; Rahman, M.S.; Tang, J. Fishpond mapping by spectral and spatial-based filtering on google earth engine: A case study in singra upazila of Bangladesh. Remote Sens. 2020, 12, 2692. [Google Scholar] [CrossRef]
- Ren, C.; Wang, Z.; Zhang, Y.; Zhang, B.; Chen, L.; Xi, Y.; Xiao, X.; Doughty, R.B.; Liu, M.; Jia, M.; et al. Rapid expansion of coastal aquaculture ponds in China from Landsat observations during 1984–2016. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101902. [Google Scholar] [CrossRef]
- Stiller, D.; Ottinger, M.; Leinenkugel, P. Spatio-temporal patterns of coastal aquaculture derived from Sentinel-1 time series data and the full landsat archive. Remote Sens. 2019, 11, 1707. [Google Scholar] [CrossRef] [Green Version]
- Gusmawati, N.; Soulard, B.; Selmaoui-Folcher, N.; Proisy, C.; Mustafa, A.; Le Gendre, R.; Laugier, T.; Lemonnier, H. Surveying shrimp aquaculture pond activity using multitemporal VHSR satellite images-case study from the Perancak estuary, Bali, Indonesia. Mar. Pollut. Bull. 2017, 131, 49–60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feed the Future Bangladesh. Available online: https://www.feedthefuture.gov/country/bangladesh/ (accessed on 27 July 2021).
- China Ministry of Natural Resources GlobeLand30. Available online: http://www.globeland30.org/defaults_en.html?type=data&src=/Scripts/map/defaults/En/browse_en.html&head=browse (accessed on 30 July 2021).
- Momtaz, S.; Shameem, M.I.M. The Research Setting. In Experiencing Climate Change in Bangladesh; Academic Press: Cambridge, MA, USA, 2016; pp. 41–68. ISBN 9780128034040. [Google Scholar]
- Bangladesh Meteorological Department Maproom: Seasonal Climate Analysis. Available online: http://datalibrary.bmd.gov.bd/maproom/Climatology/Climate_Analysis/seasonal.html?resolution=0.05&YearStart=2020&YearEnd=2020&seasonStart=Jan&seasonEnd=Dec&var=Rain&yearlyStat=Mean (accessed on 30 July 2021).
- Bangladesh Water Development Board. Summary of Rainfall in Bangladesh for the Year 2017 & 2018; Surface Water Processing Branch: Dhaka, Bangladesh, 2019.
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1995, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated water extraction index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Ji, L.; Zhang, L.; Wylie, B.K. Analysis of dynamic thresholds for the normalized difference water index. Photogramm. Eng. Remote Sens. 2009, 75, 1307–1317. [Google Scholar] [CrossRef]
- Jiang, H.; Feng, M.; Zhu, Y.; Lu, N.; Huang, J.; Xiao, T. An automated method for extracting rivers and lakes from landsat imagery. Remote Sens. 2014, 6, 5067–5089. [Google Scholar] [CrossRef] [Green Version]
- Otsu, N. A Threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, SMC-9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Jiao, L.; Liu, Y.; Li, H. Characterizing land-use classes in remote sensing imagery by shape metrics. ISPRS J. Photogramm. Remote Sens. 2012, 72, 46–55. [Google Scholar] [CrossRef]
- Yu, Q.; Gong, P.; Clinton, N.; Biging, G.; Kelly, M.; Schirokauer, D. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery. Photogramm. Eng. Remote Sens. 2006, 72, 799–811. [Google Scholar] [CrossRef] [Green Version]
- Frohn, R.C. The use of landscape pattern metrics in remote sensing image classification. Int. J. Remote Sens. 2007, 27, 2025–2032. [Google Scholar] [CrossRef]
- Kuhn, M. Building predictive models in R using the caret package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef] [Green Version]
- Janowski, L.; Tylmann, K.; Trzcinska, K.; Rudowski, S.; Tegowski, J. Exploration of glacial landforms by object-based image analysis and spectral parameters of digital elevation model. IEEE Trans. Geosci. Remote Sens. 2021, 1–17. [Google Scholar] [CrossRef]
- Gao, J.; Du, Z.; Shi, Z.; Xu, Z.; Cao, Q.; Tang, R. Switching impulse noise filter based on Laplacian convolution and pixels grouping for color images. Signal Image Video Process. 2018, 12, 1523–1529. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Ramezan, C.A.; Warner, T.A.; Maxwell, A.E. Evaluation of sampling and cross-validation tuning strategies for regional-scale machine learning classification. Remote Sens. 2019, 11, 185. [Google Scholar] [CrossRef] [Green Version]
- Shi, D.; Yang, X. An assessment of algorithmic parameters affecting image classification accuracy by random forests. Photogramm. Eng. Remote Sens. 2016, 82, 407–417. [Google Scholar] [CrossRef]
- Sasaki, Y. The Truth of the F-Measure; School of Computer Science, University of Manchester: Manchester, UK, 2007. [Google Scholar]
- Abramowitz, M.; Stegun, C.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; US Government Printing Office: Dover, NY, USA, 1972; p. 14.
- McFeeters, S.K. Using the Normalized Difference Water Index (NDWI) within a geographic information system to detect swimming pools for mosquito abatement: A practical approach. Remote Sens. 2013, 5, 3544–3561. [Google Scholar] [CrossRef] [Green Version]
- Wicaksono, A.; Wicaksono, P. Geometric accuracy assessment for shoreline derived from NDWI, MNDWI, and AWEI transformation on various coastal physical typology in Jepara Regency using Landsat 8 OLI imagery in 2018. Geoplan. J. Geomat. Plan. 2019, 6, 55–72. [Google Scholar] [CrossRef]
- Agmalaro, M.A.; Sitanggang, I.S.; Waskito, M.L. Sentinel 1 classification for garlic L and identification using support vector machine. In Proceedings of the 9th International Conference on Information and Communication Technology, Yogyakarta, Indonesia, 3–5 August 2021; pp. 440–444. [Google Scholar]
- Yan, W.; Wang, R.; Shengyi, Y.; Jianping, L. Tight reservoirs classification using random forest. In Proceedings of the 3rd International Conference on Intelligent Control, Measurement and Signal Processing and intelligent Oil Field, Xi’an, China, 23–25 July 2021; pp. 1–5. [Google Scholar]
- Iordache, M.-D.; Mantas, V.; Baltazar, E.; Lewyckyj, N.; Souverijns, N. Application of Random forest classification to detect the pine wilt disease from high resolution spectral images. In Proceedings of the International Geoscience and Remote Sensing Symposium, Virtual, 26 September–2 October 2020; pp. 4489–4492. [Google Scholar]
- Zhang, J.; Jin, R.; Yang, Y.; Hauptmann, A.G. Modified logistic regression: An approximation to SVM and its applications in large-scale text categorization. In Proceedings of the Twentieth International Conference on Machine Learning, Washington, DC, USA, 21–24 August 2003. [Google Scholar]
- Worden, J.; de Beurs, K.M. Surface water detection in the Caucasus. Int. J. Appl. Earth Obs. Geoinf. 2020, 91, 102159. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Base Method Assumptions | Shortcoming of the Base Method and Alternative Approach | Improvement Number |
|---|---|---|
| Fishponds are filled with water year-round | Some fishpond types in Bangladesh may dry out for a portion of the year (e.g., homestead ponds). Other fishponds may be planted with rice for part of the year (e.g., Gher). Therefore, assuming all fishponds are filled with water all year is not correct. Instead of focusing on areas that have water for an entire year, we should focus on time periods when each type of fishpond holds water. | 1, 3 |
| Fishponds are surrounded by non-water | Bangladesh’s landscape is very diverse, and in many areas, different types of land use can be found around fishponds such as trees, rice paddies, buildings. In some regions, fishponds are very close with very narrow boundaries (<10 m apart, which is the highest resolution of imageries used here). This assumption impacts the buffer size for the MM. | 2, 4 |
| Fishponds are easy to detect visually from images. Non-fishponds water bodies from another region were selected for algorithm training. | There is a high probability that small fishponds cannot be detected correctly through visual observation of satellite imageries. The preferred method is to use ground truthing fishpond collections from the study region that are diverse in size, shape, type, and surrounding areas. | 5 |
| CART and LR are the preferred machine learning techniques for this application | Support vector machine and random forest are identified as promising methods [44] for differentiating between fishponds and non-fishponds classes. | 6 |
| District | Date Chosen for Single Image Analysis |
|---|---|
| Bagerhat | 28 October 2020 |
| Barisal | 13 October 2020 |
| Bhola | 7 November 2020 |
| Gopalganj | 28 October 2020 |
| Jessore | 5 November 2020 |
| Khulna | 7 November 2020 |
| Satkhira | 5 November 2020 |
| Characteristic | Gher with Rice | Gher without Rice | Commercial Pond | Homestead Pond |
|---|---|---|---|---|
| Average size (m2) | 1620–2020 | 4047 | 1620 | 810 |
| Typical shape | Rectangular | Rectangular, but could have curved edges | Rectangular | Round |
| Period with water | May–December | February–December | Year-round | Year-round |
| Predominant farming system | Freshwater prawn, fish, rice, and vegetables | Shrimp and fish | Fish | Fish |
| Period of Image Collection | Performance Criteria | District | ||||||
|---|---|---|---|---|---|---|---|---|
| Bagerhat | Barisal | Bhola | Gopalganj | Jessore | Khulna | Satkhira | ||
| One year | Percentage of GT * fishpond area identified pre-classifier | 9.4% | 0.2% | 0% | 6% | 1% | 0.01% | 0% |
| GT * fishponds identified | 25 of 235 | 1 of 168 | 0 of 27 | 7 of 77 | 13 of 113 | 1 of 163 | 0 of 208 | |
| One month | Percentage of GT * fishpond area identified pre-classifier | 52% | 4.3% | 0% | 22% | 44% | 36% | 66% |
| GT * fishponds identified | 139 of 235 | 8 of 168 | 0 of 27 | 44 of 77 | 70 of 113 | 71 of 163 | 75 of 208 | |
| One day | Percentage of GT * fishpond area identified pre-classifier | 67% | 16.3% | 3% | 36% | 91% | 67% | 85% |
| GT * fishponds identified | 182 of 235 | 28 of 168 | 1 of 27 | 66 of 77 | 99 of 113 | 112 of 163 | 115 of 208 | |
| Training Method | Performance Criteria | Logistic Regression | Classification and Regression Trees |
|---|---|---|---|
| Yu et al. [23] Historical imagery | Precision | 0.788 | 0.773 |
| Recall | 0.538 | 0.495 | |
| F1 Score | 0.640 | 0.604 | |
| Ground truthing data | Precision | 0.594 | 0.738 |
| Recall | 0.898 | 0.827 | |
| F1 Score | 0.715 | 0.780 |
| Performance Criteria | Logistic Regression | Classification and Regression Trees | Random Forest | Support Vector Machine |
|---|---|---|---|---|
| Precision | 0.594 | 0.738 | 0.784 | 0.720 |
| Recall | 0.898 | 0.827 | 0.645 | 0.822 |
| F1 Score | 0.715 | 0.780 | 0.706 | 0.768 |
| Scenarios | Mean Relative Difference | |
|---|---|---|
| Lower Limit | Upper Limit | |
| Base method before classifier | −99.4% | −98.5% |
| Enhanced method before classifier | −34.4% | −31.3% |
| Base method with logistic regression | −99.7% | −97.7% |
| Enhanced method with Classification and regression trees | −91.5% | −88.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferriby, H.; Nejadhashemi, A.P.; Hernandez-Suarez, J.S.; Moore, N.; Kpodo, J.; Kropp, I.; Eeswaran, R.; Belton, B.; Haque, M.M. Harnessing Machine Learning Techniques for Mapping Aquaculture Waterbodies in Bangladesh. Remote Sens. 2021, 13, 4890. https://doi.org/10.3390/rs13234890
Ferriby H, Nejadhashemi AP, Hernandez-Suarez JS, Moore N, Kpodo J, Kropp I, Eeswaran R, Belton B, Haque MM. Harnessing Machine Learning Techniques for Mapping Aquaculture Waterbodies in Bangladesh. Remote Sensing. 2021; 13(23):4890. https://doi.org/10.3390/rs13234890
Chicago/Turabian StyleFerriby, Hannah, Amir Pouyan Nejadhashemi, Juan Sebastian Hernandez-Suarez, Nathan Moore, Josué Kpodo, Ian Kropp, Rasu Eeswaran, Ben Belton, and Mohammad Mahfujul Haque. 2021. "Harnessing Machine Learning Techniques for Mapping Aquaculture Waterbodies in Bangladesh" Remote Sensing 13, no. 23: 4890. https://doi.org/10.3390/rs13234890
APA StyleFerriby, H., Nejadhashemi, A. P., Hernandez-Suarez, J. S., Moore, N., Kpodo, J., Kropp, I., Eeswaran, R., Belton, B., & Haque, M. M. (2021). Harnessing Machine Learning Techniques for Mapping Aquaculture Waterbodies in Bangladesh. Remote Sensing, 13(23), 4890. https://doi.org/10.3390/rs13234890