
A Convolutional Neural Network Algorithm for Soil Moisture Prediction from Sentinel-1 SAR Images



Abstract
:1. Introduction
2. Material and Methods
2.1. Study Area and Data Acquisition
2.2. Sentinel-1 Data Pre-Processing
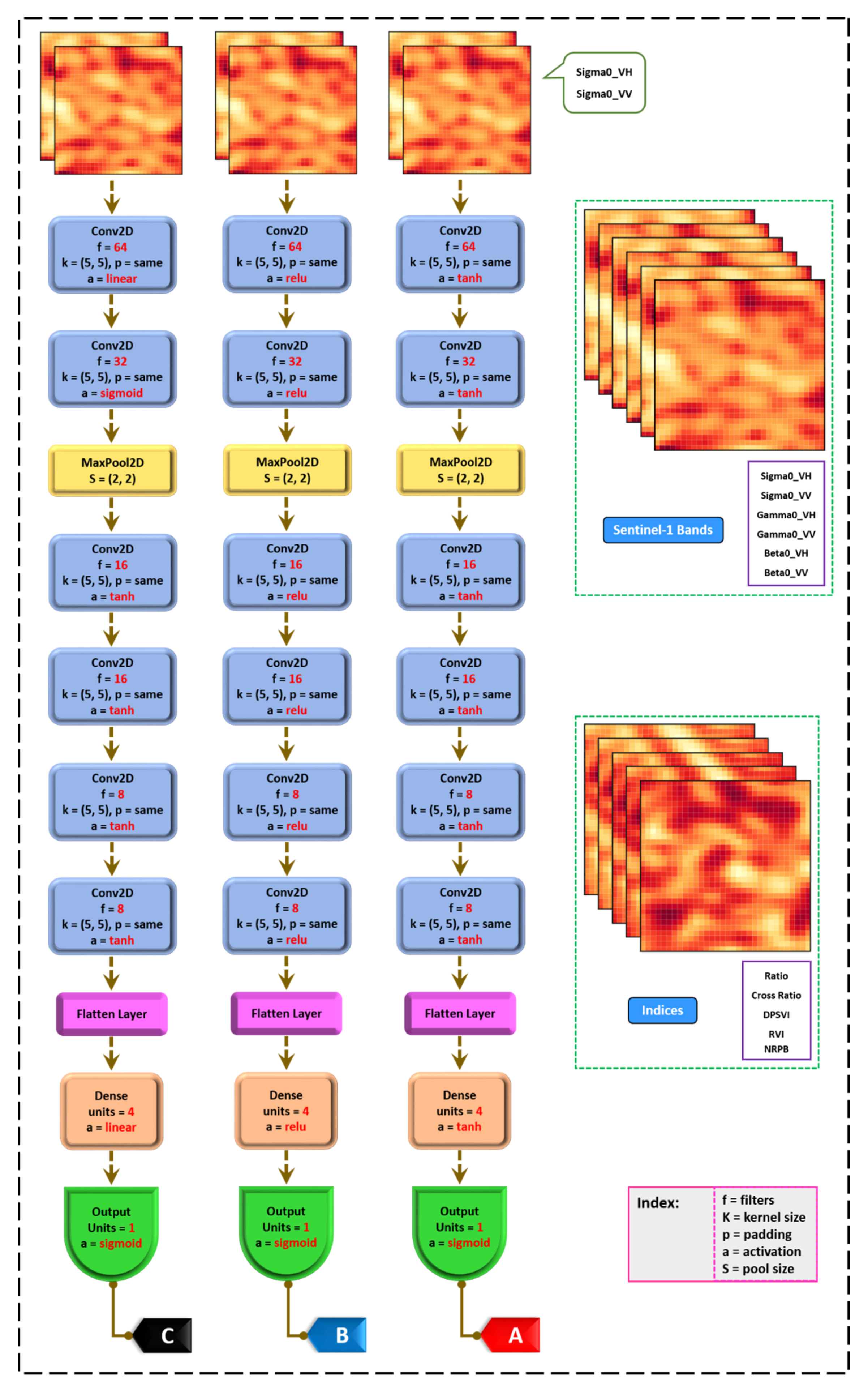
2.3. Model Establishment
3. Results and Discussion
3.1. Influence of VH and VV Polarization as Input Data to the CNN Model on the Soil Moisture Retrieval
3.2. Influence of Cross-Ratio, Ratio, RVI, NRPB and DPSVI as Input Data to the CNN Model on the Soil Moisture Retrieval
3.3. The Impact of the Activation Function
3.4. Comparison between CNN Architecture () and CNN Architecture ()
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fedoroff, N.V.J.A.; Security, F. Food in a future of 10 billion. Agric. Food Secur. 2015, 4, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Department of Economic and Social Affairs, United Nations. Population Division. World Population Prospects: The 2015 Revision, Key Findings and Advance Tables. In Working Paper No. ESA/P/WP.241; Department of Economic and Social Affairs, United Nations: New York, NY, USA, 2015; pp. 1–66. [Google Scholar]
- Shukla, A.; Panchal, H.; Mishra, M.; Patel, P.; Srivastava, H.; Patel, P.; Shukla, A. Soil moisture estimation using gravimetric technique and FDR probe technique: A comparative analysis. Am. Int. J. Res. Formal Appl. Nat. Sci. 2014, 8, 89–92. [Google Scholar]
- Maltese, A.; Capodici, F.; Ciraolo, G.; Loggia, G.L. Soil water content assessment: Critical issues concerning the operational application of the triangle method. Sensors 2015, 15, 6699–6718. [Google Scholar] [CrossRef]
- Aguilar, J.; Rogers, D.; Kisekka, I. Irrigation scheduling based on soil moisture sensors and evapotranspiration. Kans. Agric. Exp. Stn. Res. Rep. 2015, 1, 20. [Google Scholar] [CrossRef] [Green Version]
- Jones, H.G. Irrigation scheduling: Advantages and pitfalls of plant-based methods. J. Exp. Bot. 2004, 55, 2427–2436. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, A.; Zhang, Y.; Nichols, S. Review and evaluation of remote sensing methods for soil-moisture estimation. SPIE Rev. 2011, 2, 028001. [Google Scholar]
- Yoder, R.; Johnson, D.; Wilkerson, J.; Yoder, D. Soilwater sensor performance. Appl. Eng. Agric. 1998, 14, 121–133. [Google Scholar] [CrossRef]
- Liang, S.; Wang, J. Advanced Remote Sensing: Terrestrial Information Extraction and Applications; Academic Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Zeng, L.; Hu, S.; Xiang, D.; Zhang, X.; Li, D.; Li, L.; Zhang, T. Multilayer soil moisture mapping at a regional scale from multisource data via a machine learning method. Remote Sens. 2019, 11, 284. [Google Scholar] [CrossRef] [Green Version]
- Ford, T.; Harris, E.; Quiring, S. Estimating root zone soil moisture using near-surface observations from SMOS. Hydrol. Earth Syst. Sci. 2014, 18, 139–154. [Google Scholar] [CrossRef] [Green Version]
- Muller, E.; Decamps, H. Modeling soil moisture–reflectance. Remote Sens. Environ. 2001, 76, 173–180. [Google Scholar] [CrossRef] [Green Version]
- Ulaby, F.; Long, D. Microwave Radar and Radiometric Remote Sensing; Artech House: Norwood, MA, USA, 2015. [Google Scholar]
- Woodhouse, I.H. Introduction to Microwave Remote Sensing; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Singh, V.P.; Singh, P.; Haritashya, U.K. Encyclopedia of Snow, Ice and Glaciers; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar]
- Njoku, E.G.; Kong, J.A. Theory for passive microwave remote sensing of near-surface soil moisture. J. Geophys. Res. 1977, 82, 3108–3118. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Kasischke, E.S.; Riordan, K.; Brunzell, S.; Nolan, M.; Hyer, E.; Slawski, J.; Medvecz, M.; Walters, T.; Ames, S. Remote monitoring of spatial and temporal surface soil moisture in fire disturbed boreal forest ecosystems with ERS SAR imagery. Int. J. Remote Sens. 2007, 28, 2133–2162. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T. Active microwave soil moisture research. IEEE Trans. Geosci. Remote Sens. 1986, GE-24, 23–36. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic use of Sentinel-1 and Sentinel-2 images for operational soil moisture mapping at high spatial resolution over agricultural areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhang, C.; Heng, W. Retrieving Surface Soil Moisture over Wheat-Covered Areas Using Data from Sentinel-1 and Sentinel-2. Water 2021, 13, 1981. [Google Scholar] [CrossRef]
- Bousbih, S.; Zribi, M.; Lili-Chabaane, Z.; Baghdadi, N.; El Hajj, M.; Gao, Q.; Mougenot, B.J.S. Potential of Sentinel-1 radar data for the assessment of soil and cereal cover parameters. Sensors 2017, 17, 2617. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ezzahar, J.; Ouaadi, N.; Zribi, M.; Elfarkh, J.; Aouade, G.; Khabba, S.; Er-Raki, S.; Chehbouni, A.; Jarlan, L.J.R.S. Evaluation of backscattering models and support vector machine for the retrieval of bare soil moisture from Sentinel-1 data. Remote Sens. 2020, 12, 72. [Google Scholar] [CrossRef] [Green Version]
- Sutariya, S.; Hirapara, A.; Meherbanali, M.; Tiwari, M.; Singh, V.; Kalubarme, M. Soil Moisture Estimation using Sentinel-1 SAR data and Land Surface Temperature in Panchmahal district, Gujarat State. Int. J. Environ. Geoinform. 2021, 8, 65–77. [Google Scholar] [CrossRef]
- Ayehu, G.; Tadesse, T.; Gessesse, B.; Yigrem, Y.J.R.S. Soil moisture monitoring using remote sensing data and a stepwise-cluster prediction model: The case of Upper Blue Nile Basin, Ethiopia. Remote Sens. 2019, 11, 125. [Google Scholar] [CrossRef] [Green Version]
- Hoskera, A.K.; Nico, G.; Irshad Ahmed, M.; Whitbread, A.J.R.S. Accuracies of soil moisture estimations using a semi-empirical model over bare soil agricultural croplands from sentinel-1 SAR data. Remote Sens. 2020, 12, 1664. [Google Scholar] [CrossRef]
- Liu, C. Analysis of Sentinel-1 SAR Data for Mapping Standing Water in the Twente Region. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2016. [Google Scholar]
- Hu, Y.; Li, W.; Wright, D.; Aydin, O.; Wilson, D.; Maher, O.; Raad, M. Artificial intelligence approaches. arXiv 2019, arXiv:1908.10345. (preprint). [Google Scholar] [CrossRef] [Green Version]
- Grewal, D.S. A critical conceptual analysis of definitions of artificial intelligence as applicable to computer engineering. IOSR J. Comput. Eng. 2014, 16, 9–13. [Google Scholar] [CrossRef]
- Hardian, R.; Liang, Z.; Zhang, X.; Szekely, G. Artificial intelligence: The silver bullet for sustainable materials development. Green Chem. 2020, 22, 7521–7528. [Google Scholar] [CrossRef]
- Schmidt-Erfurth, U.; Sadeghipour, A.; Gerendas, B.S.; Waldstein, S.M.; Bogunović, H. Artificial intelligence in retina. Prog. Retin. Eye Res. 2018, 67, 1–29. [Google Scholar] [CrossRef] [PubMed]
- Robert, N. How artificial intelligence is changing nursing. Nurs. Manag. 2019, 50, 30. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Yamashita, R.; Nishio, M.; Do, R.K.G.; Togashi, K. Convolutional neural networks: An overview and application in radiology. Insights Imaging 2018, 9, 611–629. [Google Scholar] [CrossRef] [Green Version]
- Shaheen, F.; Verma, B.; Asafuddoula, M. Impact of automatic feature extraction in deep learning architecture. In Proceedings of the 2016 International Conference on Digital Image Computing: Techniques and Applications (DICTA), Gold Coast, Australia, 30 November–2 December 2016; pp. 1–8. [Google Scholar]
- Galib, S.M. Applications of Machine Learning in Nuclear Imaging and Radiation Detection; Missouri University of Science and Technology: Rolla, MO, USA, 2019. [Google Scholar]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.-S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comprehensive review and list of resources. IEEE Geosci. Remote. Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Andrearczyk, V.; Whelan, P.F. Deep learning in texture analysis and its application to tissue image classification. In Biomedical Texture Analysis; Elsevier: Amsterdam, The Netherlands, 2017; pp. 95–129. [Google Scholar]
- Mahmood, A.; Bennamoun, M.; An, S.; Sohel, F.; Boussaid, F.; Hovey, R.; Kendrick, G.; Fisher, R.B. Deep learning for coral classification. In Handbook of Neural Computation; Elsevier: Amsterdam, The Netherlands, 2017; pp. 383–401. [Google Scholar]
- Perez, D.; Islam, K.; Hill, V.; Zimmerman, R.; Schaeffer, B.; Shen, Y.; Li, J. Quantifying seagrass distribution in coastal water with deep learning models. Remote Sens. 2020, 12, 1581. [Google Scholar] [CrossRef]
- Hu, Z.; Xu, L.; Yu, B. Soil Moisture Retrieval Using Convolutional Neural Networks: Application to Passive Microwave Remote Sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42. [Google Scholar] [CrossRef] [Green Version]
- Dorigo, W.; Wagner, W.; Hohensinn, R.; Hahn, S.; Paulik, C.; Xaver, A.; Gruber, A.; Drusch, M.; Mecklenburg, S.; van Oevelen, P. International Soil Moisture Network: A Data Hosting Facility for Global in Situ Soil Moisture Measurements. Hydrol. Earth Syst. Sci. 2011, 15, 1675–1698. [Google Scholar] [CrossRef] [Green Version]
- Dorigo, W.; Xaver, A.; Vreugdenhil, M.; Gruber, A.; Hegyiova, A.; Sanchis-Dufau, A.; Zamojski, D.; Cordes, C.; Wagner, W.; Drusch, M. Global automated quality control of in situ soil moisture data from the International Soil Moisture Network. Vadose Zone J. 2013, 12, 1–21. [Google Scholar] [CrossRef]
- Aberer, D.; Himmelbauer, I.; Schremmer, L.; Petrakovic, I.; Dorigo, W.; Goryl, P.; Sabia, R. The International Soil Moisture Network in assistance of EO soil moisture validation products, services and models. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 4–8 May 2020; p. 16493. [Google Scholar]
- Smith, A.B.; Walker, J.P.; Western, A.W.; Young, R.; Ellett, K.; Pipunic, R.; Grayson, R.; Siriwardena, L.; Chiew, F.H.; Richter, H. The Murrumbidgee soil moisture monitoring network data set. Water Resour. Res. 2012, 48, 1–6. [Google Scholar] [CrossRef]
- Young, R.; Walker, J.; Yeoh, N.; Smith, A.; Ellett, K.; Merlin, O.; Western, A. Soil Moisture and Meteorological Observations from the Murrumbidgee Catchment; Department of Civil and Environmental Engineering, The University of Melbourne: Melbourne, Australia, 2008. [Google Scholar]
- Foelsche, U. Assessment of spatial uncertainty of heavy rainfall at catchment scale using a dense gauge network. Hydrol. Earth Syst. Sci. 2019, 23, 2863–2875. [Google Scholar]
- Fuchsberger, J.; Kirchengast, G.; Kabas, T. Release Notes for Version 7 of the WegenerNet Processing System (WPS Level-2 Data v7); Wegener Center for Climate and Global Change, University of Graz: Graz, Austria, 2018. [Google Scholar]
- Kabas, T. WegenerNet Klimastationsnetz Region Feldbach: Experimenteller Aufbau und Hochauflösende Daten für die Klima-und Umweltforschung. Ph.D. Thesis, University of Graz, Graz, Austria, 2011. [Google Scholar]
- Kirchengast, G.; Kabas, T.; Leuprecht, A.; Bichler, C.; Truhetz, H. Wegenernet: A pioneering high-resolution network for monitoring weather and climate. Bull. Am. Meteorol. Soc. 2014, 95, 227–242. [Google Scholar] [CrossRef]
- Potin, P.; Rosich, B.; Miranda, N.; Grimont, P.; Shurmer, I.; O’Connell, A.; Krassenburg, M.; Gratadour, J.-B. Copernicus Sentinel-1 Constellation Mission Operations Status. In Proceedings of the IGARSS 2019-2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 5385–5388. [Google Scholar]
- Abdikan, S.; Sanli, F.B.; Ustuner, M.; Calò, F. Land cover mapping using sentinel-1 SAR data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 757. [Google Scholar] [CrossRef] [Green Version]
- Bovenga, F.; Belmonte, A.; Refice, A.; Pasquariello, G.; Nutricato, R.; Nitti, D.O.; Chiaradia, M.T. Performance analysis of satellite missions for multi-temporal SAR interferometry. Sensors 2018, 18, 1359. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Van Tricht, K.; Gobin, A.; Gilliams, S.; Piccard, I. Synergistic use of radar Sentinel-1 and optical Sentinel-2 imagery for crop mapping: A case study for Belgium. Remote Sens. 2018, 10, 1642. [Google Scholar] [CrossRef] [Green Version]
- Baghdadi, N.; El Hajj, M.; Zribi, M. An operational high resolution soil moisture retrieval algorithm using sentinel-1 images. In Proceedings of the 2019 PhotonIcs & Electromagnetics Research Symposium-Spring (PIERS-Spring), Rome, Italy, 17–20 June 2019; pp. 4086–4092. [Google Scholar]
- Carreiras, J.M.; Quegan, S.; Tansey, K.; Page, S. Sentinel-1 observation frequency significantly increases burnt area detectability in tropical SE Asia. Environ. Res. Lett. 2020, 15, 054008. [Google Scholar] [CrossRef]
- Gao, Q.; Zribi, M.; Escorihuela, M.J.; Baghdadi, N. Synergetic use of Sentinel-1 and Sentinel-2 data for soil moisture mapping at 100 m resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ticehurst, C.; Zhou, Z.-S.; Lehmann, E.; Yuan, F.; Thankappan, M.; Rosenqvist, A.; Lewis, B.; Paget, M. Building a SAR-Enabled Data Cube Capability in Australia Using SAR Analysis Ready Data. Data 2019, 4, 100. [Google Scholar] [CrossRef] [Green Version]
- Mouche, A.; Chapron, B. Global C-B and E nvisat, RADARSAT-2 and S entinel-1 SAR measurements in copolarization and cross-polarization. J. Geophys. Res. Ocean. 2015, 120, 7195–7207. [Google Scholar] [CrossRef] [Green Version]
- Khan, S.; Rahmani, H.; Shah, S.A.A.; Bennamoun, M.; Medioni, G.; Dickinson, S. A Guide to Convolutional Neural Networks for Computer Vision. In Synthesis Lectures on Computer Vision; Morgan & Claypool: San Rafael, CA, USA, 2018; Volume 8, pp. 1–207. [Google Scholar]
- Sewak, M.; Karim, M.R.; Pujari, P. Practical Convolutional Neural Networks: Implement. Advanced Deep Learning Models Using Python; Packt Publishing Ltd.: Birmingham, UK, 2018. [Google Scholar]
- Vreugdenhil, M.; Wagner, W.; Bauer-Marschallinger, B.; Pfeil, I.; Teubner, I.; Rüdiger, C.; Strauss, P. Sensitivity of Sentinel-1 backscatter to vegetation dynamics: An Austrian case study. Remote Sens. 2018, 10, 1396. [Google Scholar] [CrossRef] [Green Version]
- Dabrowska-Zielinska, K.; Musial, J.; Malinska, A.; Budzynska, M.; Gurdak, R.; Kiryla, W.; Bartold, M.; Grzybowski, P. Soil moisture in the Biebrza Wetlands retrieved from Sentinel-1 imagery. Remote Sens. 2018, 10, 1979. [Google Scholar] [CrossRef] [Green Version]
- Frison, P.-L.; Fruneau, B.; Kmiha, S.; Soudani, K.; Dufrene, E.; Le Toan, T.; Koleck, T.; Villard, L.; Mougin, E.; Rudant, J.-P. Potential of Sentinel-1 data for monitoring temperate mixed forest phenology. Remote Sens. 2018, 10, 2049. [Google Scholar] [CrossRef] [Green Version]
- Hardy, A.; Ettritch, G.; Cross, D.E.; Bunting, P.; Liywalii, F.; Sakala, J.; Silumesii, A.; Singini, D.; Smith, M.; Willis, T. Automatic detection of open and vegetated water bodies using Sentinel 1 to map African malaria vector mosquito breeding habitats. Remote Sens. 2019, 11, 593. [Google Scholar] [CrossRef] [Green Version]
- Holtgrave, A.-K.; Röder, N.; Ackermann, A.; Erasmi, S.; Kleinschmit, B. Comparing Sentinel-1 and-2 Data and Indices for Agricultural Land Use Monitoring. Remote Sens. 2020, 12, 2919. [Google Scholar] [CrossRef]
- Kim, Y.; van Zyl, J.J. A time-series approach to estimate soil moisture using polarimetric radar data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2519–2527. [Google Scholar]
- Mandal, D.; Kumar, V.; Ratha, D.; Dey, S.; Bhattacharya, A.; Lopez-Sanchez, J.M.; McNairn, H.; Rao, Y.S. Dual polarimetric radar vegetation index for crop growth monitoring using sentinel-1 SAR data. Remote Sens. Environ. 2020, 247, 111954. [Google Scholar] [CrossRef]
- Periasamy, S. Significance of dual polarimetric synthetic aperture radar in biomass retrieval: An attempt on Sentinel-1. Remote Sens. Environ. 2018, 217, 537–549. [Google Scholar] [CrossRef]
- Periasamy, S.; Senthil, D.; Shanmugam, R.S. A Modified Triangle with SAR Target Parameters for Soil Texture Categorization Mapping. In Proceedings of the Conference of the Arabian Journal of Geosciences, Sousse, Tunisia, 12–15 November 2018; pp. 97–99. [Google Scholar]
- Filgueiras, R.; Mantovani, E.C.; Althoff, D.; Fernandes Filho, E.I.; da Cunha, F.F. Crop NDVI monitoring based on sentinel 1. Remote Sens. 2019, 11, 1441. [Google Scholar] [CrossRef] [Green Version]
- Mohite, J.; Sawant, S.; Pandit, A.; Pappula, S. Investigating the Performance of Random Forest and Support Vector Regression for Estimation of Cloud-Free Ndvi Using SENTINEL-1 SAR Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 1379–1383. [Google Scholar] [CrossRef]
- Sun, L.; Chen, J.; Guo, S.; Deng, X.; Han, Y. Integration of Time Series Sentinel-1 and Sentinel-2 Imagery for Crop Type Mapping over Oasis Agricultural Areas. Remote Sens. 2020, 12, 158. [Google Scholar] [CrossRef] [Green Version]
- Sessions, V.; Valtorta, M. The Effects of Data Quality on Machine Learning Algorithms. ICIQ 2006, 6, 485–498. [Google Scholar]
- Varma Rudraraju, N.; Boyanapally, V. Data Quality Model for Machine Learning. Master Thesis, Faculty of Computing, Blekinge Institute of Technology, Karlskrona, Sweden, 2019. [Google Scholar]
- Pristyanto, Y.; Adi, S.; Sunyoto, A. The effect of feature selection on classification algorithms in credit approval. In Proceedings of the 2019 International Conference on Information and Communications Technology (ICOIACT), Yogyakarta, Indonesia, 24–25 July 2019; pp. 451–456. [Google Scholar]
- Wang, S.; Tang, J.; Liu, H. Feature Selection. In Encyclopedia of Machine Learning and Data Mining; Springer Science & Business Media: New York, NY, USA, 2017. [Google Scholar]
- Li, J.; Cheng, K.; Wang, S.; Morstatter, F.; Trevino, R.P.; Tang, J.; Liu, H. Feature selection: A data perspective. ACM Comput. Surv. (CSUR) 2017, 50, 1–45. [Google Scholar] [CrossRef] [Green Version]
- Small, D. Flattening gamma: Radiometric terrain correction for SAR imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- Ulander, L.M. Radiometric slope correction of synthetic-aperture radar images. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1115–1122. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name | Latitude Degree | Longitude Degree | Start of Study | End of Study | No. of Sentinel−1 Images |
|---|---|---|---|---|---|
| Kyeamba 06 | −35.3898 | 147.4572 | 15 June 2014 | 1 November 2020 | 154 |
| Kyeamba 07 | −35.3939 | 147.5662 | 154 | ||
| Kyeamba 10 | −35.324 | 147.5348 | 154 | ||
| Kyeamba 11 | −35.272 | 147.429 | 154 | ||
| Kyeamba 12 | −35.2275 | 147.485 | 154 | ||
| Kyeamba 14 | −35.1249 | 147.4974 | 154 | ||
| Yanco 01 | −34.6289 | 145.849 | 198 | ||
| Yanco 04 | −34.7194 | 146.02 | 195 | ||
| Yanco 05 | −34.7284 | 146.2932 | 195 | ||
| Yanco 06 | −34.8426 | 145.8669 | 196 | ||
| Yanco 07 | −34.8518 | 146.1153 | 197 | ||
| Yanco 08 | −34.847 | 146.414 | 197 | ||
| Yanco 09 | −34.9678 | 146.0163 | 191 | ||
| Yanco 10 | −35.0054 | 146.3099 | 191 | ||
| Yanco 11 | −35.1098 | 145.9355 | 191 | ||
| Yanco 12 | −35.0696 | 146.1689 | 191 | ||
| Yanco 13 | −35.0903 | 146.3065 | 191 |
| Station Name | Latitude Degree | Longitude Degree | Start of Study | End of Study | No. of Sentinel-1 Images |
|---|---|---|---|---|---|
| 06 | 46.9973 | 15.8551 | 15 June 2014 | 1 November 2020 | 1189 |
| 15 | 46.9826 | 15.8705 | |||
| 19 | 46.9797 | 15.9412 | |||
| 27 | 46.9723 | 15.8150 | |||
| 34 | 46.9712 | 15.9436 | |||
| 50 | 46.9595 | 15.9658 | |||
| 54 | 46.9433 | 15.7596 | |||
| 77 | 46.9329 | 15.9071 | |||
| 78 | 46.9329 | 15.9246 | |||
| 84 | 46.9343 | 16.0406 | |||
| 85 | 46.9169 | 15.7811 | |||
| 99 | 46.9213 | 16.0334 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hegazi, E.H.; Yang, L.; Huang, J. A Convolutional Neural Network Algorithm for Soil Moisture Prediction from Sentinel-1 SAR Images. Remote Sens. 2021, 13, 4964. https://doi.org/10.3390/rs13244964
Hegazi EH, Yang L, Huang J. A Convolutional Neural Network Algorithm for Soil Moisture Prediction from Sentinel-1 SAR Images. Remote Sensing. 2021; 13(24):4964. https://doi.org/10.3390/rs13244964
Chicago/Turabian StyleHegazi, Ehab H., Lingbo Yang, and Jingfeng Huang. 2021. "A Convolutional Neural Network Algorithm for Soil Moisture Prediction from Sentinel-1 SAR Images" Remote Sensing 13, no. 24: 4964. https://doi.org/10.3390/rs13244964