
A Semi-Automatic Workflow to Extract Irregularly Aligned Plots and Sub-Plots: A Case Study on Lentil Breeding Populations



Abstract
:1. Introduction
2. Material and Methods
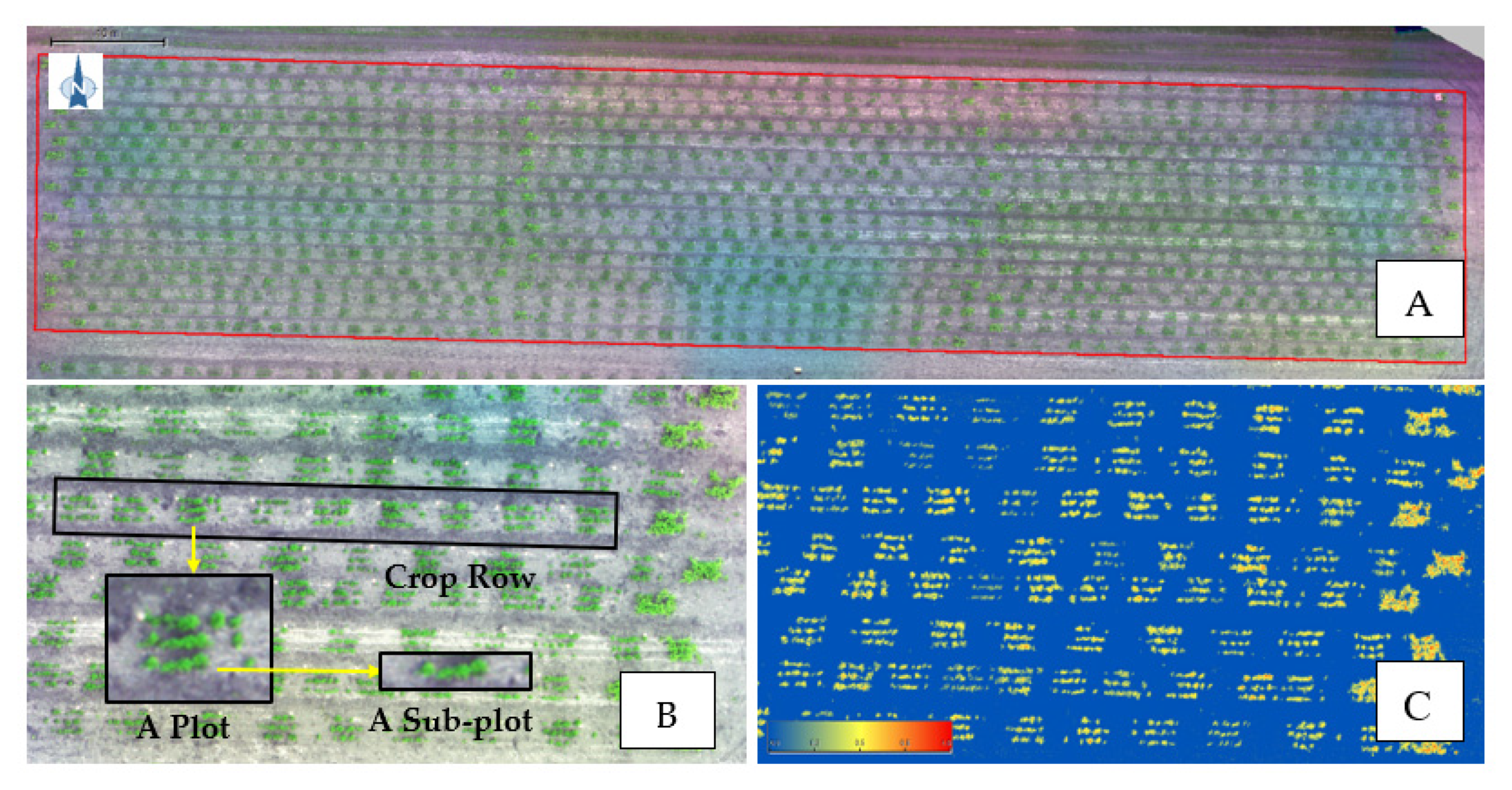
2.1. Field Study
2.2. Image Acquisition and Processing
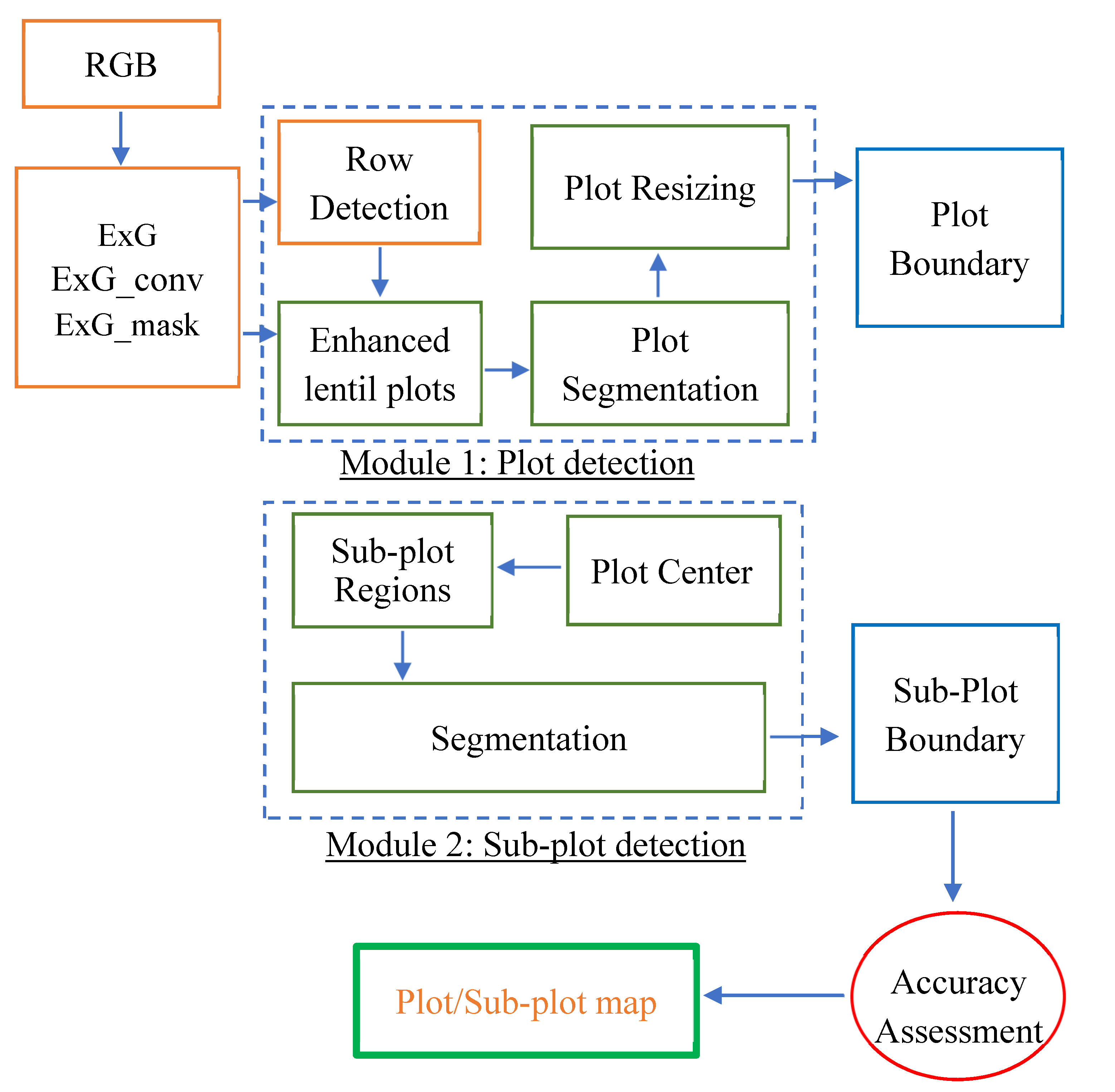
2.3. Plot and Sub-Plot Extraction
2.4. Vegetation Index Calculation
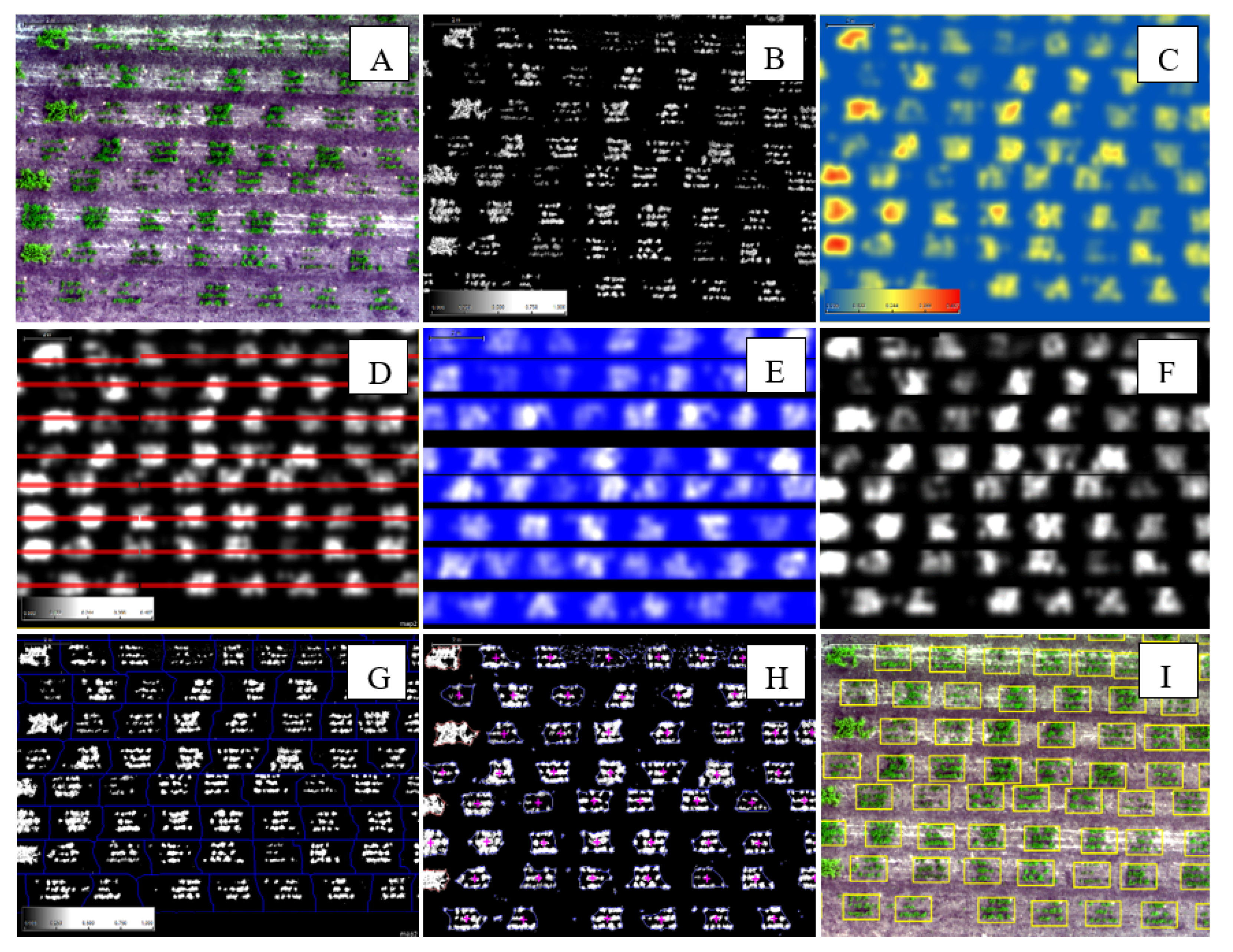
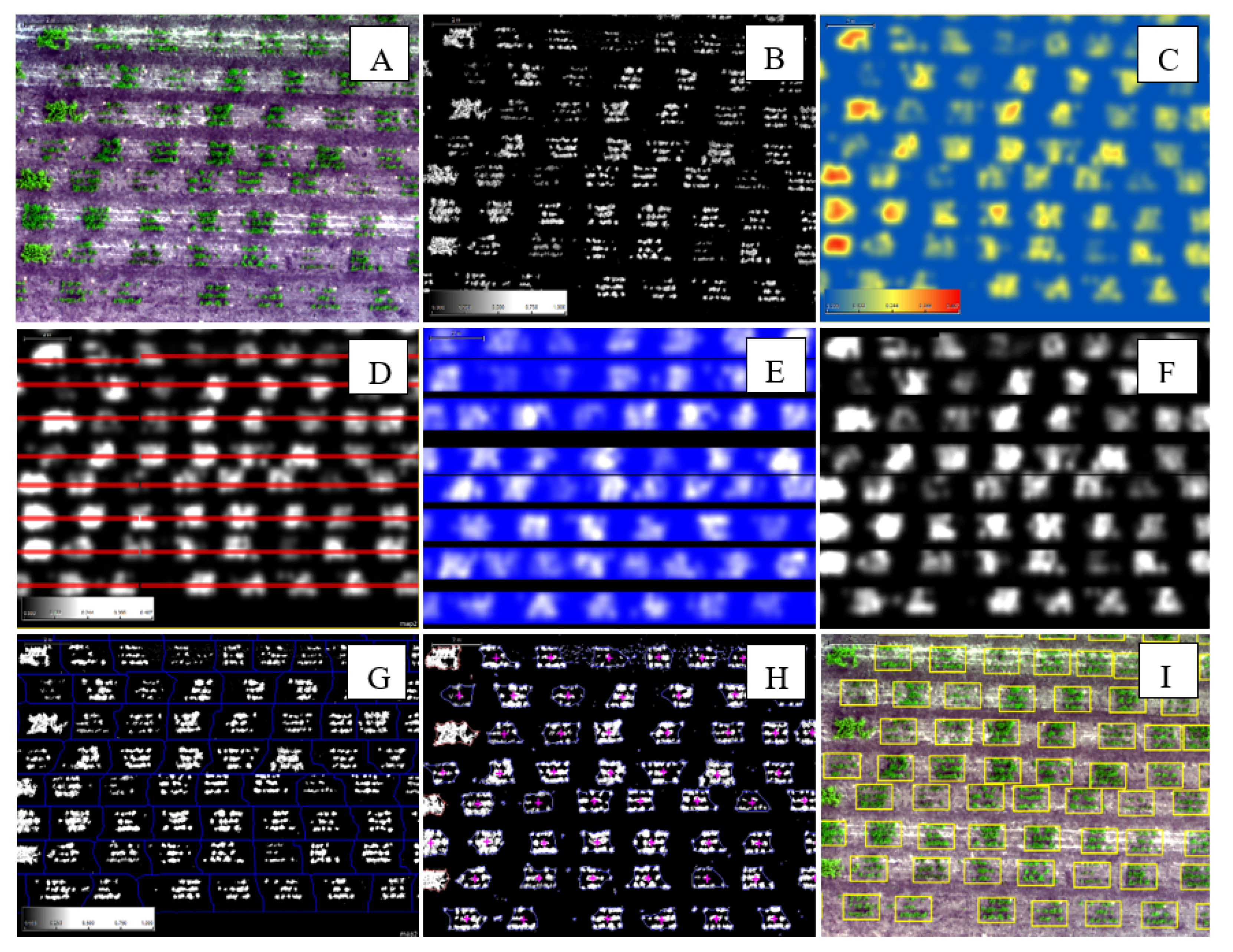
2.5. Plot Detection
2.6. Accuracy Assessment
3. Results and Discussion
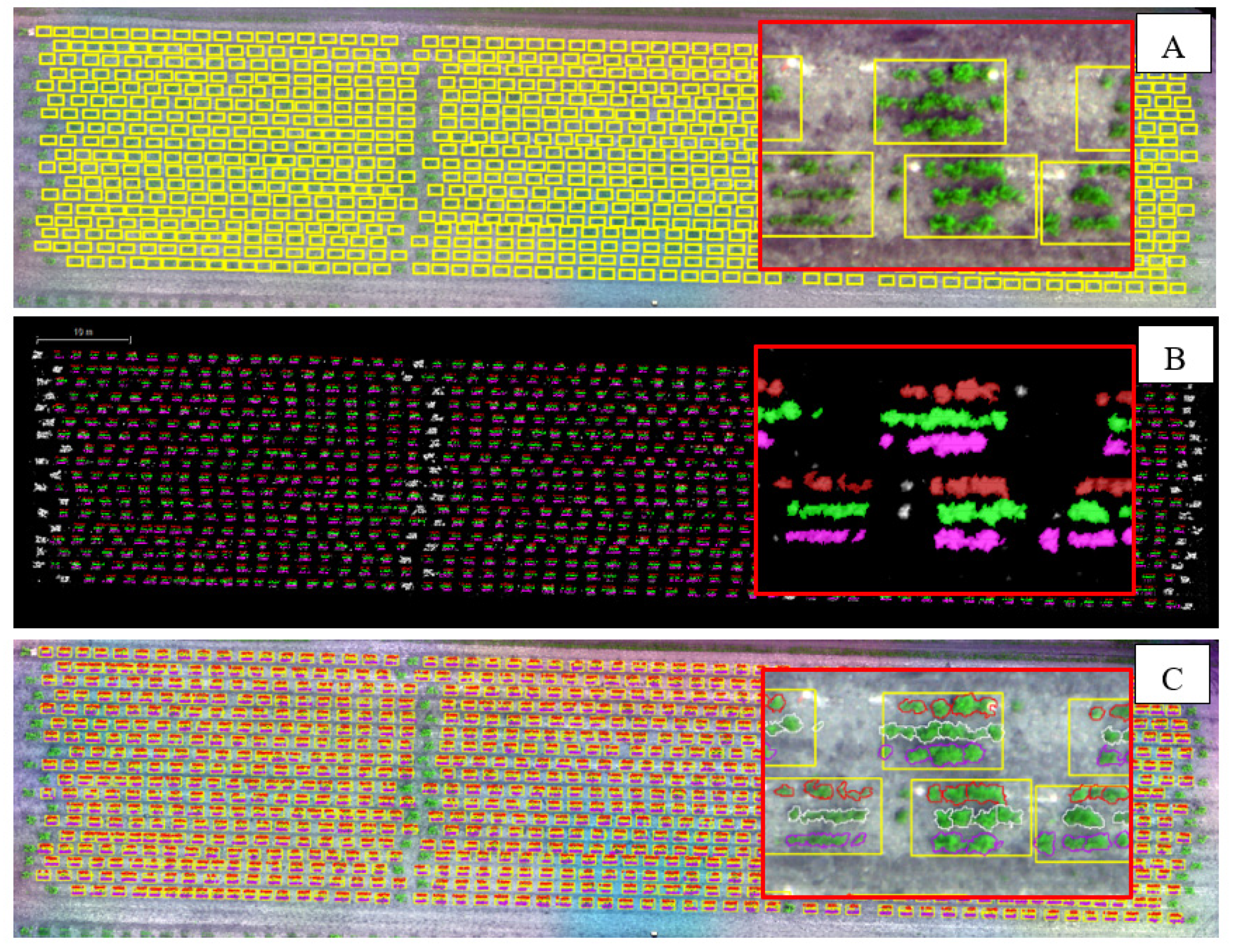
3.1. Plot Boundary Map
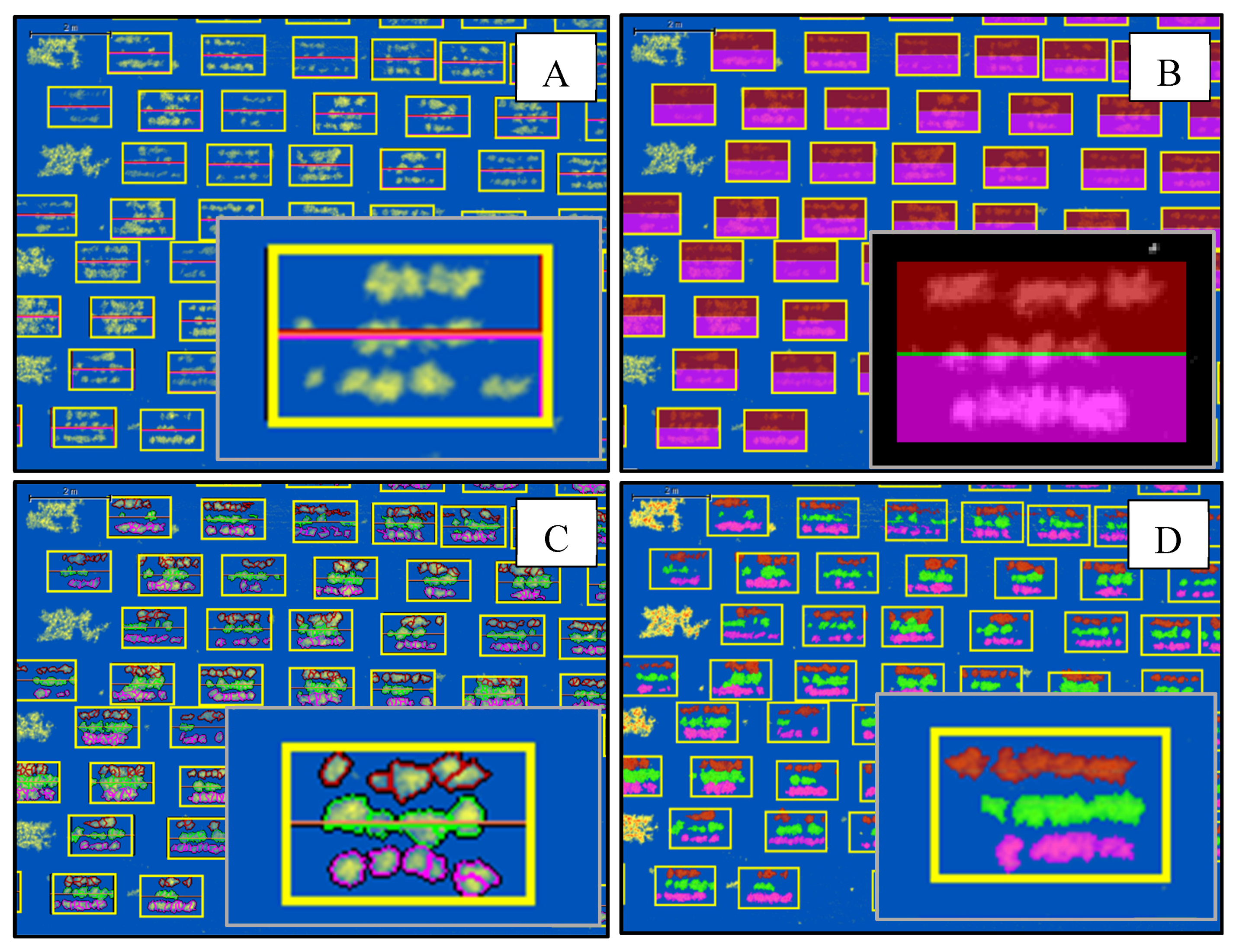
3.2. Sub-Plot Boundary Map
3.3. Accuracy Assessment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, H.; Zhang, J.; Pan, Y.; Shuai, G.; Zhu, X.; Zhu, S. An Efficient Approach Based on UAV Orthographic Imagery to Map Paddy with Support of Field-Level Canopy Height from Point Cloud Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2034–2046. [Google Scholar] [CrossRef]
- Niu, Y.; Zhang, L.; Zhang, H.; Han, W.; Peng, X. Estimating Above-Ground Biomass of Maize Using Features Derived from UAV-Based RGB Imagery. Remote Sens. 2019, 11, 1261. [Google Scholar] [CrossRef] [Green Version]
- Makanza, R.; Zaman-Allah, M.; Cairns, J.E.; Magorokosho, C.; Tarekegne, A.; Olsen, M.; Prasanna, B.M. High-Throughput Phenotyping of Canopy Cover and Senescence in Maize Field Trials Using Aerial Digital Canopy Imaging. Remote Sens. 2018, 10, 330. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ubukawa, T.; De Sherbinin, A.; Onsrud, H.; Nelson, A.; Payne, K.; Cottray, O.; Maron, M. A Review of Roads Data Development Methodologies. Data Sci. J. 2014, 13, 45–66. [Google Scholar] [CrossRef]
- Drover, D.; Nederend, J.; Reiche, B.; Deen, B.; Lee, L.; Taylor, G.W. The Guelph plot analyzer: Semi-automatic extraction of small-plot research data from aerial imagery. In Proceedings of the 14th International Conference on Precision Agriculture, Montreal, QC, Canada, 24–26 June 2018. [Google Scholar]
- Haghighattalab, A.; Pérez, L.G.; Mondal, S.; Singh, D.; Schinstock, D.; Rutkoski, J.; Ortiz-Monasterio, I.; Singh, R.P.; Goodin, D.; Poland, J. Application of unmanned aerial systems for high throughput phenotyping of large wheat breeding nurseries. Plant Method. 2016, 12, 1–15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Anderson, S.L.; Murray, S.C.; Malambo, L.; Ratcliff, C.; Popescu, S.; Cope, D.; Chang, A.; Jung, J.; Thomasson, J.A. Prediction of Maize Grain Yield before Maturity Using Improved Temporal Height Estimates of Unmanned Aerial Systems. Plant Phenom. J. 2019, 2, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Csillik, O.; Cherbini, J.; Johnson, R.; Lyons, A.; Kelly, M. Identification of Citrus Trees from Unmanned Aerial Vehicle Imagery Using Convolutional Neural Networks. Drones 2018, 2, 39. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Fu, H.; Yu, L.; Cracknell, A. Deep Learning Based Oil Palm Tree Detection and Counting for High-Resolution Remote Sensing Images. Remote Sens. 2016, 9, 22. [Google Scholar] [CrossRef] [Green Version]
- Mubin, N.A.; Nadarajoo, E.; Shafri, H.Z.M.; Hamedianfar, A. Young and mature oil palm tree detection and counting using convolutional neural network deep learning method. Int. J. Remote Sens. 2019, 40, 7500–7515. [Google Scholar] [CrossRef]
- Ampatzidis, Y.; Partel, V. UAV-Based High Throughput Phenotyping in Citrus Utilizing Multispectral Imaging and Artificial Intelligence. Remote Sens. 2019, 11, 410. [Google Scholar] [CrossRef] [Green Version]
- Fareed, N.; Rehman, K. Integration of Remote Sensing and GIS to Extract Plantation Rows from A Drone-Based Image Point Cloud Digital Surface Model. ISPRS Int. J. Geo-Inf. 2020, 9, 151. [Google Scholar] [CrossRef] [Green Version]
- Hassanein, M.; Khedr, M.; El-Sheimy, N. Crop row detection procedure using low-cost UAV imagery system. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 349–356. [Google Scholar] [CrossRef] [Green Version]
- Torres-Sánchez, J.; Lopez-Granados, F.; Peña-Barragan, J.M. An automatic object-based method for optimal thresholding in UAV images: Application for vegetation detection in herbaceous crops. Comput. Electron. Agric. 2015, 114, 43–52. [Google Scholar] [CrossRef]
- Khan, Z.; Miklavcic, S.J. An Automatic Field Plot Extraction Method from Aerial Orthomosaic Images. Front. Plant Sci. 2019, 10, 683. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, I.; Eramian, M.; Ovsyannikov, I.; van der Kamp, W.; Nielsen, K.; Duddu, H.S.; Rumali, A.; Shirtliffe, S.; Bett, K. Automatic Detection and Segmentation of Lentil Crop Breeding Plots from Multi-Spectral Images Captured by UAV-Mounted Camera. In Proceedings of the 2019 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa Village, HI, USA, 7–11 January 2018; pp. 1673–1681. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Pixel Constraint | Surface Tension Parameter | |
|---|---|---|---|
| Shrink | ExG_enhanced < 0 | Reference | object |
| Operation | <= | ||
| Value | 0.55 | ||
| Box size X and Y | 11 | ||
| Min. object size | 2000 | ||
| Reference Data | |||||||
|---|---|---|---|---|---|---|---|
| Classes | Top | Middle | Bottom | Ground | Total | User’s Accuracy | |
| Classification | Top | 345 | 0 | 0 | 46 | 391 | 0.88 |
| Middle | 0 | 350 | 0 | 62 | 412 | 0.85 | |
| Bottom | 7 | 0 | 354 | 43 | 404 | 0.88 | |
| Ground | 45 | 29 | 53 | 2155 | 2282 | 0.94 | |
| Total | 397 | 379 | 407 | 2306 | 3489 | ||
| Producer’s Accuracy | 0.87 | 0.92 | 0.87 | 0.93 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ha, T.; Duddu, H.; Bett, K.; Shirtliffe, S.J. A Semi-Automatic Workflow to Extract Irregularly Aligned Plots and Sub-Plots: A Case Study on Lentil Breeding Populations. Remote Sens. 2021, 13, 4997. https://doi.org/10.3390/rs13244997
Ha T, Duddu H, Bett K, Shirtliffe SJ. A Semi-Automatic Workflow to Extract Irregularly Aligned Plots and Sub-Plots: A Case Study on Lentil Breeding Populations. Remote Sensing. 2021; 13(24):4997. https://doi.org/10.3390/rs13244997
Chicago/Turabian StyleHa, Thuan, Hema Duddu, Kirstin Bett, and Steve J. Shirtliffe. 2021. "A Semi-Automatic Workflow to Extract Irregularly Aligned Plots and Sub-Plots: A Case Study on Lentil Breeding Populations" Remote Sensing 13, no. 24: 4997. https://doi.org/10.3390/rs13244997