
Mapping Essential Urban Land Use Categories in Beijing with a Fast Area of Interest (AOI)-Based Method





 and
and
Abstract

1. Introduction
2. Study Area and Data Sets
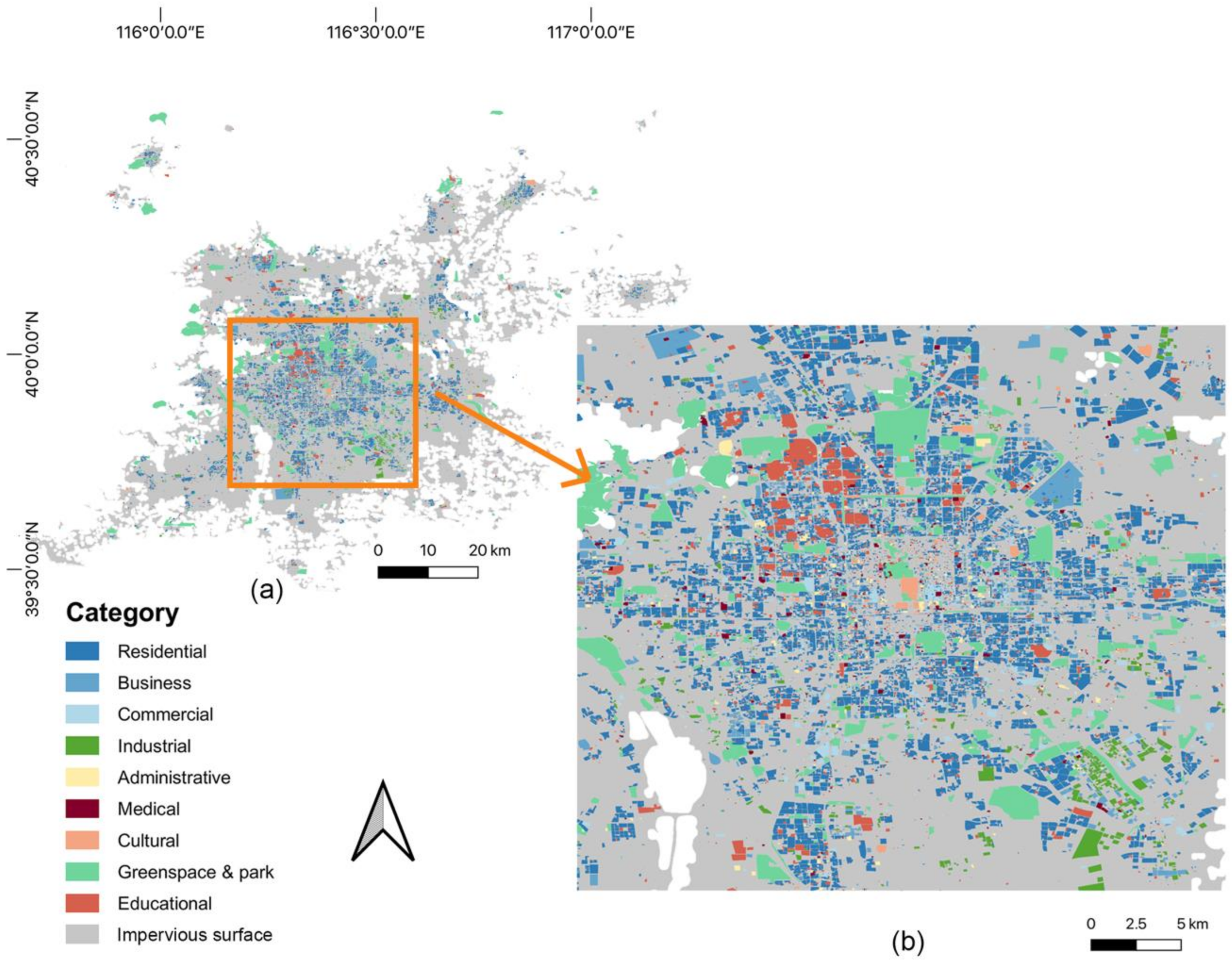
2.1. Study Area
2.2. Data Sets
2.2.1. Sentinel-2 Optical Imagery
2.2.2. Baidu Map Point of Interest (POI) and AOI
2.2.3. Luojia-1 Nighttime Lights
2.2.4. Easygo Crowdedness Data
3. Method
3.1. Generation of Units and Interpretation of Added Training Units
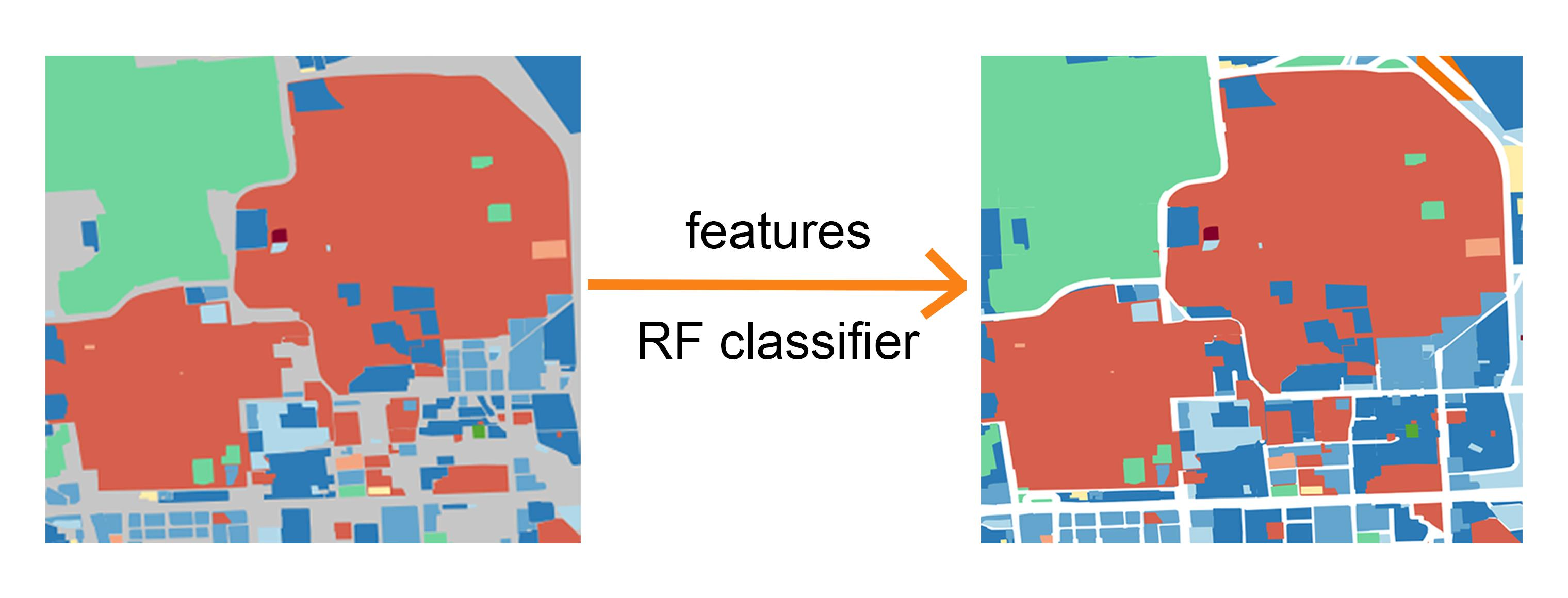
3.2. Generation of AOI Layers
3.3. Feature Extraction
3.4. Training RF Classifier
3.5. Interpretation of Validation Units
4. Results
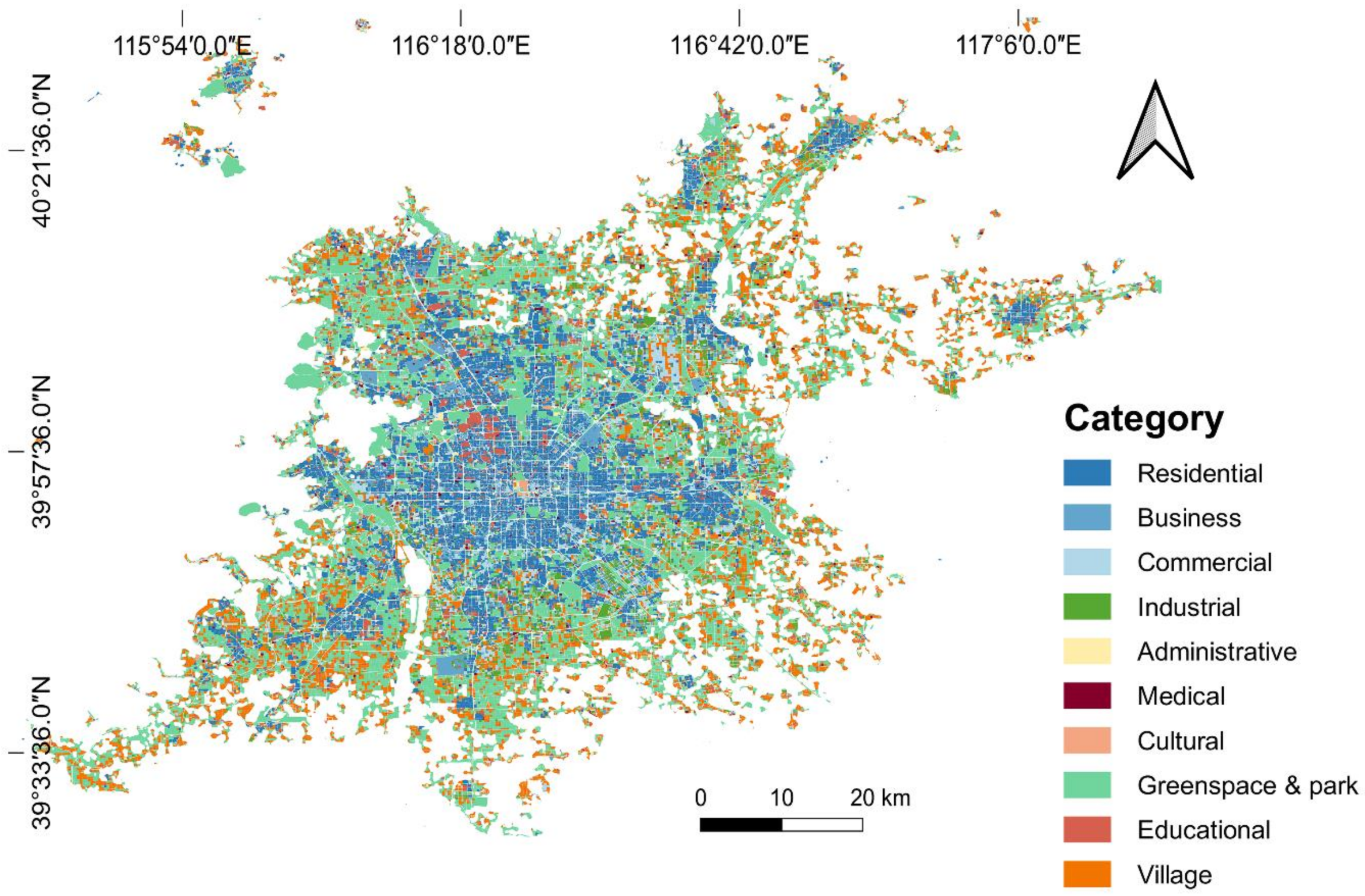
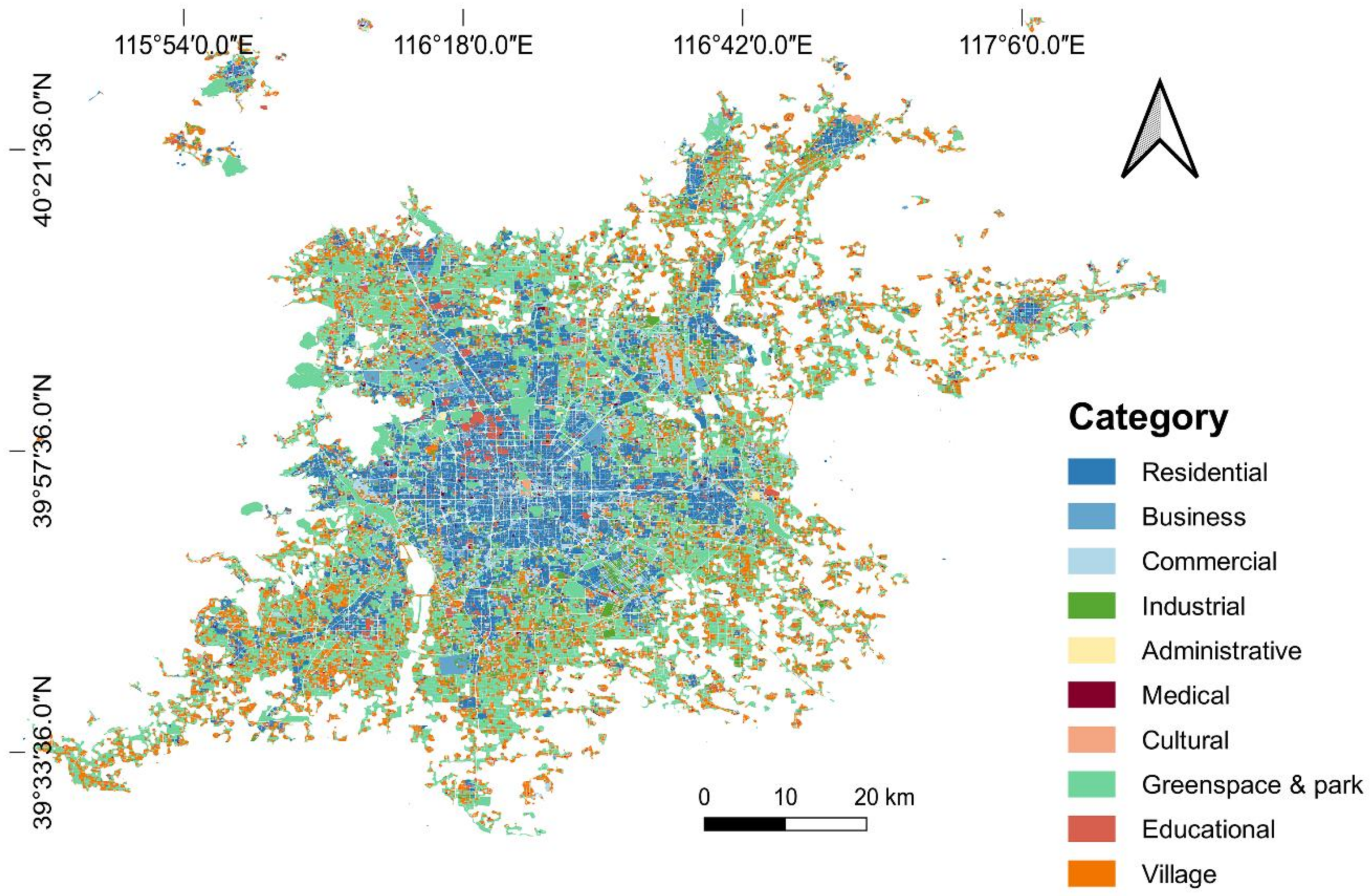
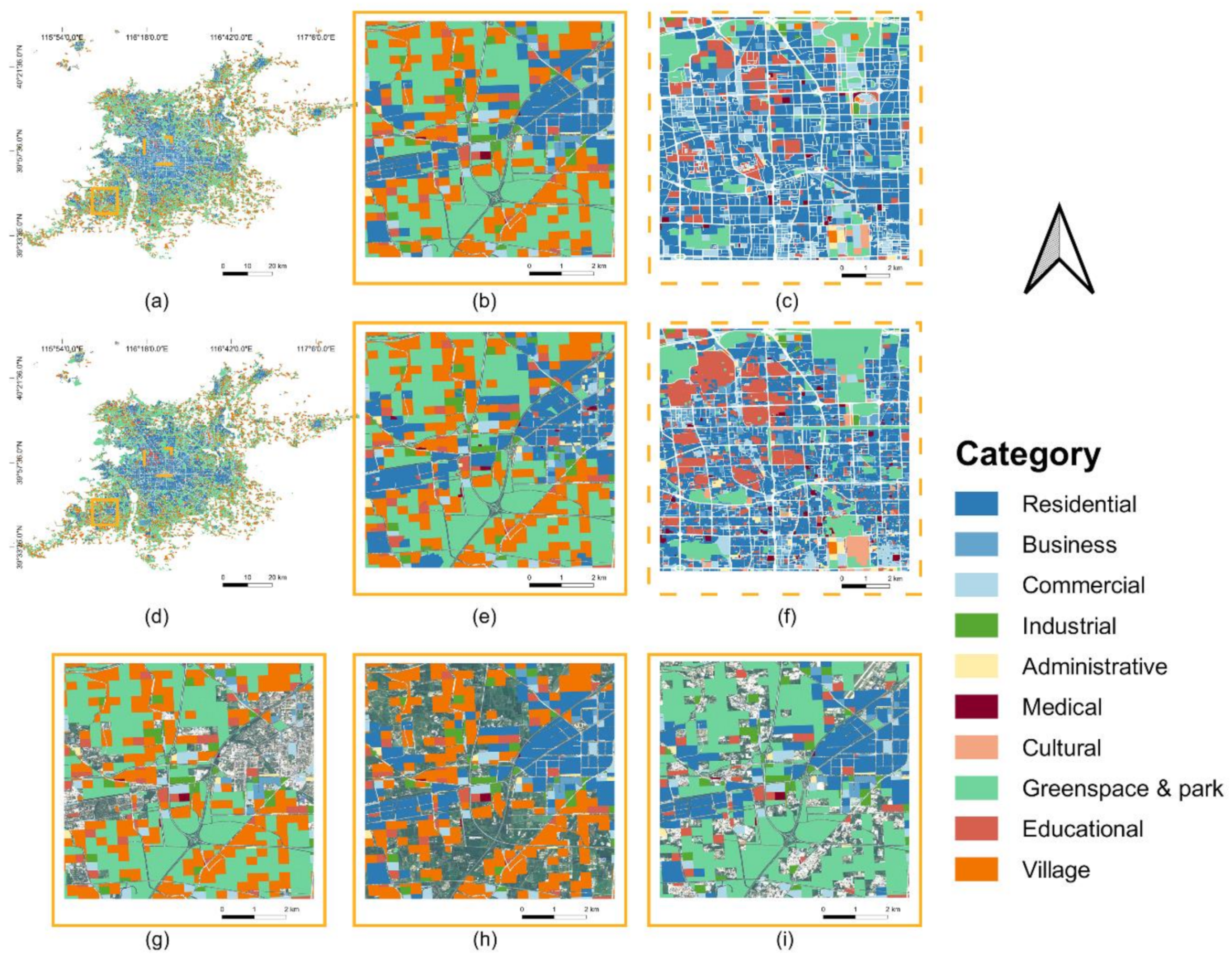
4.1. Mapping Results
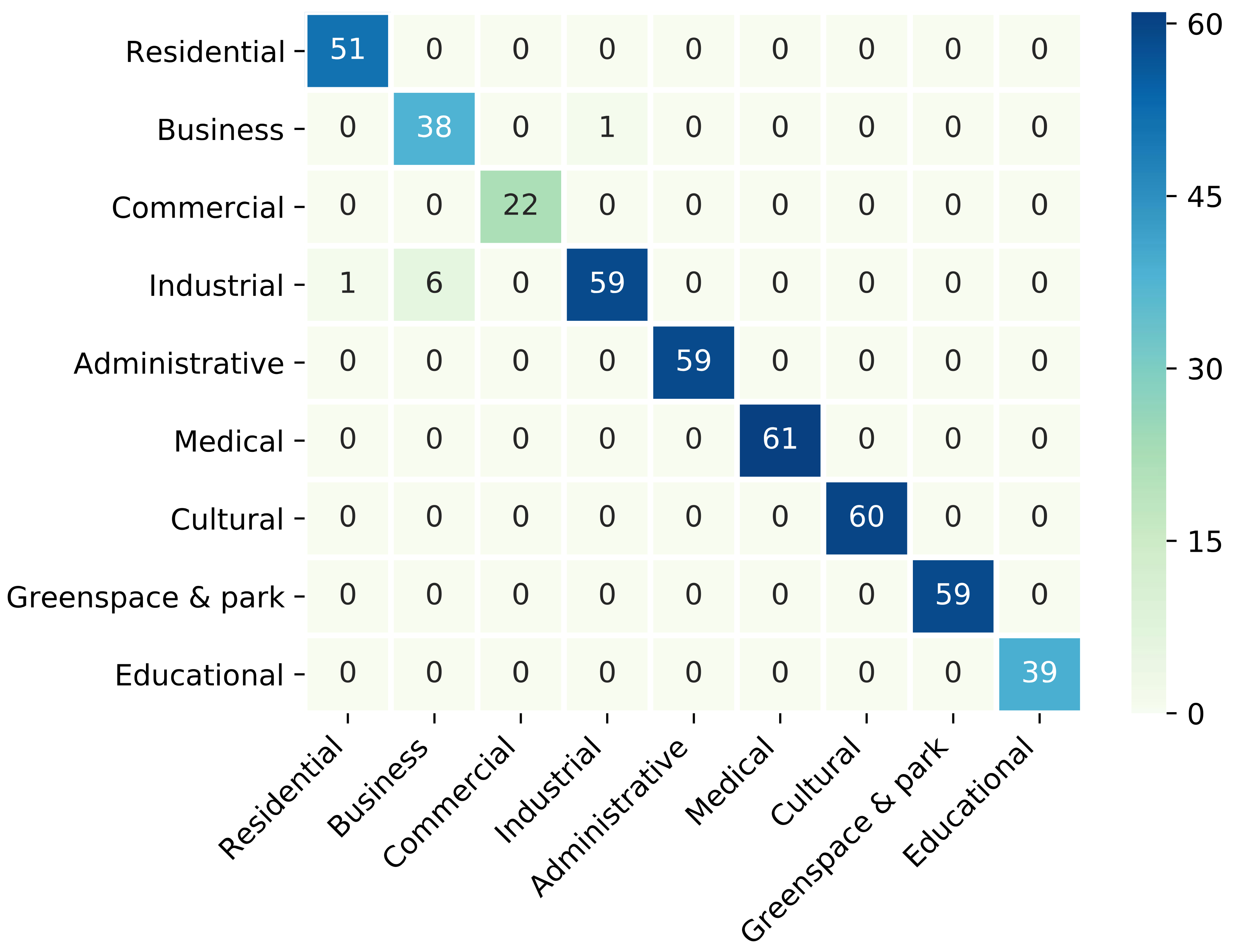
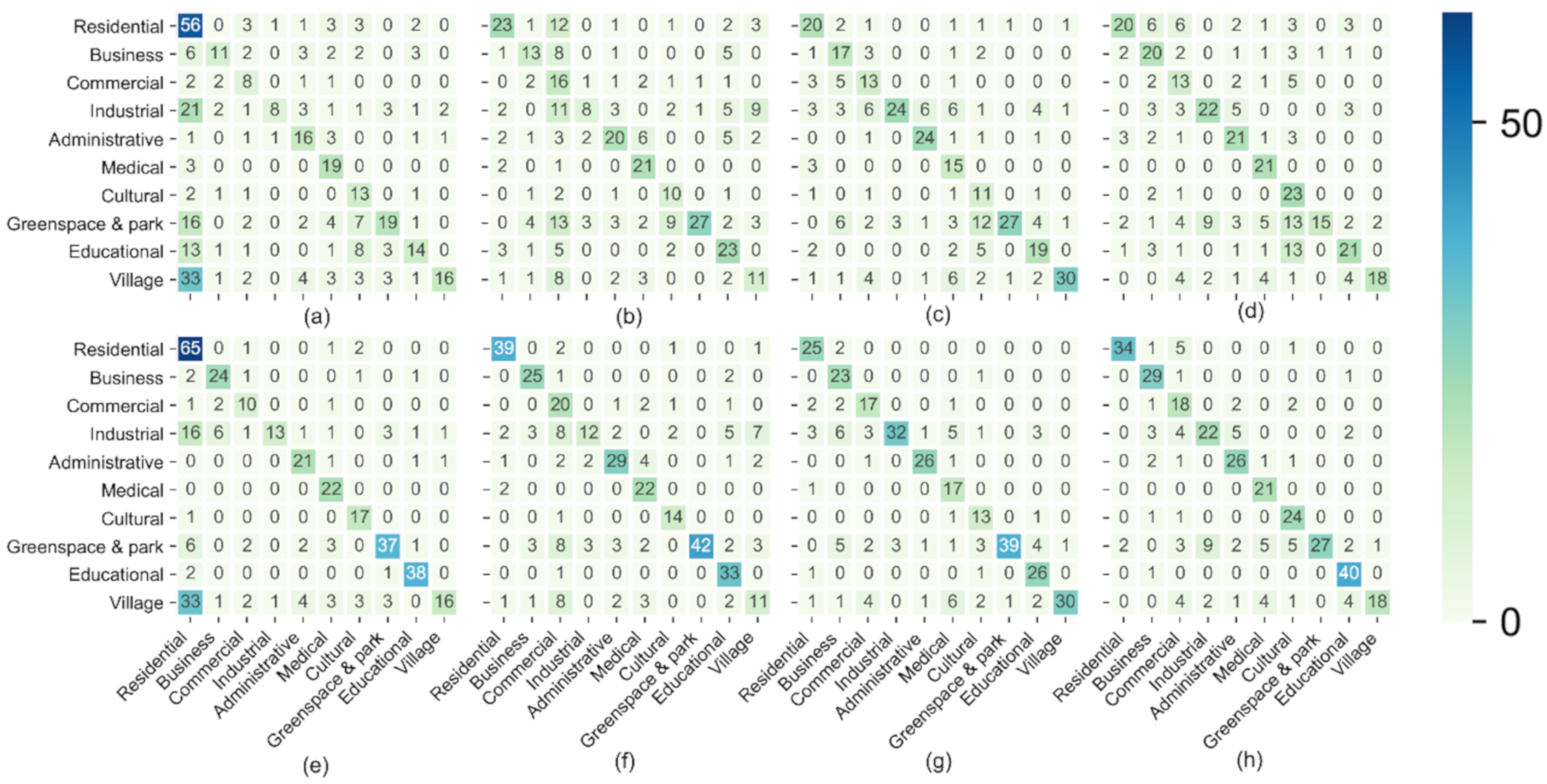
4.2. Accuracy Assessment of Mapping Results
4.3. Accuracy Assessment for Various Sample Size
4.4. Comparison of Mapping Results before and after Integrating AOIs Layers
4.5. Comparison with EULUC Mapping Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gong, P.; Liang, S.; Carlton, E.J.; Jiang, Q.; Wu, J.; Wang, L.; Remais, J.V. Urbanisation and health in China. Lancet 2012, 379, 843–852. [Google Scholar] [CrossRef]
- Grimm, N.B.; Faeth, S.H.; Golubiewski, N.E.; Redman, C.L.; Wu, J.; Bai, X.; Briggs, J.M. Global Change and the Ecology of Cities. Science 2008, 319, 75–6760. [Google Scholar] [CrossRef] [PubMed]
- Mao, W.; Lu, D.; Hou, L.; Liu, X.; Yue, W. Comparison of Machine-Learning Methods for Urban Land-Use Mapping in Hangzhou City, China. Remote Sens. 2020, 12, 2817. [Google Scholar] [CrossRef]
- Lee, H.; Wang, J.; Leblon, B. Using Linear Regression, Random Forests, and Support Vector Machine with Unmanned Aerial Vehicle Multispectral Images to Predict Canopy Nitrogen Weight in Corn. Remote Sens. 2020, 12, 2071. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, L.; Zhang, B.; Men, J. Scene-level land use classification based on multi-features soft-probability cascading. Trans. Chin. Soc. Agric. Eng. 2016, 32, 266–272. [Google Scholar]
- Yao, Y.; Liang, H.; Li, X.; Zhang, J.; He, J. Sensing Urban Land-Use Patterns by Integrating Google Tensorflow And Scene-Classification Models. arXiv 2017, arXiv:1708.01580. [Google Scholar] [CrossRef]
- Fragou, S.; Kalogeropoulos, K.; Stathopoulos, N.; Louka, P.; Srivastava, P.K.; Karpouzas, S.P.; Kalivas, D.P.; Petropoulos, G. Quantifying Land Cover Changes in a Mediterranean Environment Using Landsat TM and Support Vector Machines. Forests 2020, 11, 750. [Google Scholar] [CrossRef]
- Chakhar, A.; Ortega-Terol, D.; Hernández-López, D.; Ballesteros, R.; Ortega, J.F.; Moreno, M.A. Assessing the Accuracy of Multiple Classification Algorithms for Crop Classification Using Landsat-8 and Sentinel-2 Data. Remote Sens. 2020, 12, 1735. [Google Scholar] [CrossRef]
- LaRocque, A.; Phiri, C.; Leblon, B.; Pirotti, F.; Connor, K.; Hanson, A. Wetland Mapping with Landsat 8 OLI, Sentinel-1, ALOS-1 PALSAR, and LiDAR Data in Southern New Brunswick, Canada. Remote Sens. 2020, 12, 2095. [Google Scholar] [CrossRef]
- Morell-Monzó, S.; Estornell, J.; Sebastiá-Frasquet, M.-T. Comparison of Sentinel-2 and High-Resolution Imagery for Mapping Land Abandonment in Fragmented Areas. Remote Sens. 2020, 12, 2062. [Google Scholar]
- Paoletti, M.; Haut, J.; Tao, X.; Plaza, J.; Plaza, A. A New GPU Implementation of Support Vector Machines for Fast Hyperspectral Image Classification. Remote Sens. 2020, 12, 1257. [Google Scholar] [CrossRef]
- Hu, T.; Yang, J.; Li, X.; Gong, P. Mapping Urban Land Use by Using Landsat Images and Open Social Data. Remote Sens. 2016, 8, 151. [Google Scholar] [CrossRef]
- Liu, X.; He, J.; Yao, Y.; Zhang, J.; Liang, H.; Wang, H.; Hong, Y. Classifying urban land use by integrating remote sensing and social media data. Int. J. Geogr. Inf. Sci. 2017, 31, 1675–1696. [Google Scholar] [CrossRef]
- Tu, Y.; Chen, B.; Zhang, T.; Xu, B. Regional Mapping of Essential Urban Land Use Categories in China: A Segmentation-Based Approach. Remote Sens. 2020, 12, 1058. [Google Scholar] [CrossRef]
- Gong, P.; Chen, B.; Li, X.; Liu, H.; Wang, J.; Bai, Y.; Chen, J.; Chen, X.; Fang, L.; Feng, S.; et al. Mapping essential urban land use categories in China (EULUC-China): Preliminary results for 2018. Sci. Bull. 2020, 65, 182–187. [Google Scholar] [CrossRef]
- Su, M.; Guo, R.; Chen, B.; Hong, W.; Wang, J.; Feng, Y.; Xu, B. Sampling Strategy for Detailed Urban Land Use Classification: A Systematic Analysis in Shenzhen. Remote Sens. 2020, 12, 1497. [Google Scholar] [CrossRef]
- Zong, L.; He, S.; Lian, J.; Bie, Q.; Wang, X.; Dong, J.; Xie, Y. Detailed Mapping of Urban Land Use Based on Multi-Source Data: A Case Study of Lanzhou. Remote Sens. 2020, 12, 1987. [Google Scholar] [CrossRef]
- Sun, J.; Wang, H.; Song, Z.; Lu, J.; Meng, P.; Qin, S. Mapping Essential Urban Land Use Categories in Nanjing by Integrating Multi-Source Big Data. Remote Sens. 2020, 12, 2386. [Google Scholar] [CrossRef]
- Hagenauer, J.; Helbich, M. Mining urban land use patterns from volunteered geographic information using genetic algorithms and artificial neural networks. Int. J. Geogr. Inf. Sci. 2012, 26, 963–982. [Google Scholar] [CrossRef]
- Jokar Arsanjani, J.; Helbich, M.; Bakillah, M.; Hagenauer, J.; Zipf, A. Toward mapping land-use patterns from volunteered geographic information. Int. J. Geogr. Inf. Sci. 2013, 27, 2264–2278. [Google Scholar] [CrossRef]
- Theobald, D.M. Development and applications of a comprehensive land use classification and map for the US. PLoS ONE 2014, 9, e94628. [Google Scholar] [CrossRef] [PubMed]
- Vaz, E.; Jokar Arsanjani, J. Crowdsourced mapping of land use in urban dense environments: An assessment of Toronto. Can. Geogr./Géogr. Can. 2015, 59, 246–255. [Google Scholar] [CrossRef]
- Forget, Y.; Linard, C.; Gilbert, M. Supervised Classification of Built-Up Areas in Sub-Saharan African Cities Using Landsat Imagery and OpenStreetMap. Remote Sens. 2018, 10, 1145. [Google Scholar] [CrossRef]
- Grippa, T.; Georganos, S.; Zarougui, S.; Bognounou, P.; Diboulo, E.; Forget, Y.; Lennert, M.; Vanhuysse, S.; Mboga, N.; Wolff, E. Mapping Urban Land Use at Street Block Level Using OpenStreetMap, Remote Sensing Data, and Spatial Metrics. ISPRS Int. J. Geo-Inf. 2018, 7, 246. [Google Scholar] [CrossRef]
- Gong, P.; Li, X.; Wang, J.; Bai, Y.; Chen, B.; Hu, T.; Liu, X.; Xu, B.; Yang, J.; Zhang, W.; et al. Annual maps of global artificial impervious area (GAIA) between 1985 and 2018. Remote Sens. Environ. 2020, 236, 111510. [Google Scholar] [CrossRef]
- Louis, J.; Debaecker, V.; Pflug, B.; Main-Knorn, M.; Bieniarz, J.; Müller-Wilm, U.; Cadau, E.; Gascon, F. SENTINEL-2 SEN2COR: L2A Processor for Users. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Li, X.; Zhao, L.; Li, D.; Xu, H. Mapping Urban Extent Using Luojia 1-01 Nighttime Light Imagery. Sensors 2018, 18, 3665. [Google Scholar] [CrossRef]
- Li, F.; Zhang, F.; Li, X.; Wang, P.; Liang, J.; Mei, Y.; Cheng, W.; Qian, Y. Spatiotemporal Patterns of the Use of Urban Green Spaces and External Factors Contributing to Their Use in Central Beijing. Int. J. Environ. Res. Public Health 2017, 14, 237. [Google Scholar] [CrossRef]
- Chen, B.; Song, Y.; Jiang, T.; Chen, Z.; Huang, B.; Xu, B. Real-Time Estimation of Population Exposure to PM2.5 Using Mobile- and Station-Based Big Data. Int. J. Environ. Res. Public Health 2018, 15, 573. [Google Scholar] [CrossRef]
- Gong, P.; Marceau, D.J.; Howarth, P.J. A comparison of spatial feature extraction algorithms for land-use classification with SPOT HRV data. Remote Sens. Environ. 1992, 40, 137–151. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Gong, P.; Liu, H.; Zhang, M.; Li, C.; Wang, J.; Huang, H.; Clinton, N.; Ji, L.; Li, W.; Bai, Y.; et al. Stable classification with limited sample: Transferring a 30-m resolution sample set collected in 2015 to mapping 10-m resolution global land cover in 2017. Sci. Bull. 2019, 64, 370–373. [Google Scholar] [CrossRef]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S.; et al. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Unit Level | AOI Level |
|---|---|
| 01 Residential | 01 Residential |
| 02 Business | 02 Business |
| 03 Commercial | 03 Commercial |
| 04 Industrial | 04 Industrial |
| 05 Greenspace and park | 05 Greenspace and park |
| 06 Administrative | 06 Administrative |
| 07 Medical | 07 Medical |
| 08 Cultural | 08 Cultural |
| 09 Educational | 09 Educational |
| 10 Village |
| Category | Proportion of Area | Count of AOI | |
|---|---|---|---|
| 01 Residential | 398 | 41.20% | 9525 |
| 02 Business | 95 | 9.83% | 4198 |
| 03 Commercial | 48 | 4.97% | 3376 |
| 04 Industrial | 39 | 4.04% | 1242 |
| 05 Administrative | 15 | 1.55% | 1432 |
| 06 Medical | 11 | 1.14% | 798 |
| 07 Cultural | 11 | 1.14% | 535 |
| 08 Greenspace and park | 264 | 27.33% | 929 |
| 09 Educational | 85 | 8.80% | 3782 |
| Total | 966 | 100% | 25,817 |
| Category | UA | PA | Support |
|---|---|---|---|
| 01 Residential | 0.98 | 1 | 51 |
| 02 Business | 0.86 | 0.97 | 39 |
| 03 Commercial | 1 | 1 | 22 |
| 04 Industrial | 0.98 | 0.89 | 66 |
| 05 Administrative | 1 | 1 | 59 |
| 06 Medical | 1 | 1 | 61 |
| 07 Cultural | 1 | 1 | 60 |
| 08 Greenspace and park | 1 | 1 | 59 |
| 09 Educational | 1 | 1 | 39 |
| Total | OA = 98%, Kappa = 0.98 | 456 | |
| Data Source | Features | Count |
|---|---|---|
| Sentinel-2 | Mean of B, G, R, NIR bands, NDVI, and NDWI | 6 |
| Standard deviation of B, G, R, NIR bands, NDVI, and NDWI | 6 | |
| Baidu POIs | Total number of each types of POIs | 11 |
| Luojia-1 | Mean of DN values | 1 |
| Standard deviation of DN values | 1 | |
| Easygo | Sum of crowdedness values during the four sessions of a weekday | 4 |
| Standard deviation of crowdedness values during the four sessions of a weekday | 4 | |
| Sum of crowdedness values during the four sessions of a weekend | 4 | |
| Standard deviation of crowdedness values during the four sessions of a weekend | 4 |
| Method | Before AOI Layer | After AOI Layer | Support | ||
|---|---|---|---|---|---|
| OA | Kappa | OA | Kappa | ||
| OSM | 48% | 0.40 | 70% | 0.66 | 377 |
| OSM+300 m gird | 50% | 0.45 | 72% | 0.68 | 345 |
| OSM+200 m grid | 62% | 0.58 | 77% | 0.74 | 323 |
| OSM+100 m grid | 57% | 0.53 | 76% | 0.74 | 340 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Hu, T.; Gong, P.; Du, S.; Chen, B.; Li, X.; Dai, Q. Mapping Essential Urban Land Use Categories in Beijing with a Fast Area of Interest (AOI)-Based Method. Remote Sens. 2021, 13, 477. https://doi.org/10.3390/rs13030477
Li X, Hu T, Gong P, Du S, Chen B, Li X, Dai Q. Mapping Essential Urban Land Use Categories in Beijing with a Fast Area of Interest (AOI)-Based Method. Remote Sensing. 2021; 13(3):477. https://doi.org/10.3390/rs13030477
Chicago/Turabian StyleLi, Xiaoting, Tengyun Hu, Peng Gong, Shihong Du, Bin Chen, Xuecao Li, and Qi Dai. 2021. "Mapping Essential Urban Land Use Categories in Beijing with a Fast Area of Interest (AOI)-Based Method" Remote Sensing 13, no. 3: 477. https://doi.org/10.3390/rs13030477
APA StyleLi, X., Hu, T., Gong, P., Du, S., Chen, B., Li, X., & Dai, Q. (2021). Mapping Essential Urban Land Use Categories in Beijing with a Fast Area of Interest (AOI)-Based Method. Remote Sensing, 13(3), 477. https://doi.org/10.3390/rs13030477