
A High-Speed, Light-Weight Scalar Magnetometer Bird for km Scale UAV Magnetic Surveying: On Sensor Choice, Bird Design, and Quality of Output Data

 , , , ,
, , , ,
Abstract
:
1. Introduction
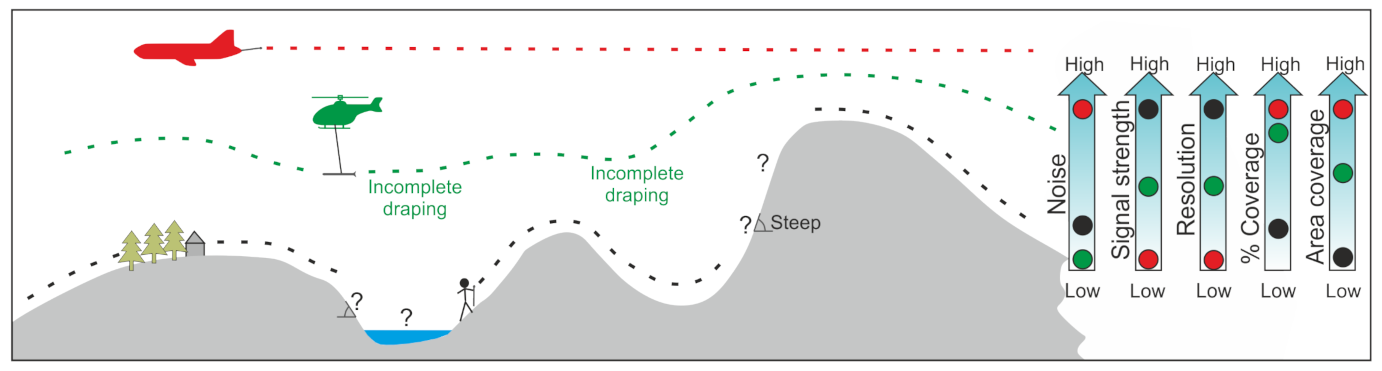
1.1. UAV Magnetic Survey Systems: Opportunities and Current State-of-the Art
1.2. Pros and Cons of a Magnetometer Bird
1.3. Objective of the Study
2. Prototype Design and Specifications
2.1. Survey System Design Criteria
- Provide high-quality magnetic data at km scale for, e.g., mineral exploration purposes.
- Be operationally efficient, i.e., the survey system should be fast to deploy and aerodynamically stable at UAV speeds of minimum 13–14 m/s (47–50 km/h) or even higher.
- Be deployable in most terrain and weather conditions, i.e., (i) the operator must be able to easily carry the survey system several kilometers and deploy it, even in difficult terrain; (ii) the setup must be dust and water protected as well as operational in wind speeds of at least 8–10 m/s.
2.2. Choice of OP Magnetometer
2.2.1. General Magnetometer Evaluation Parameters
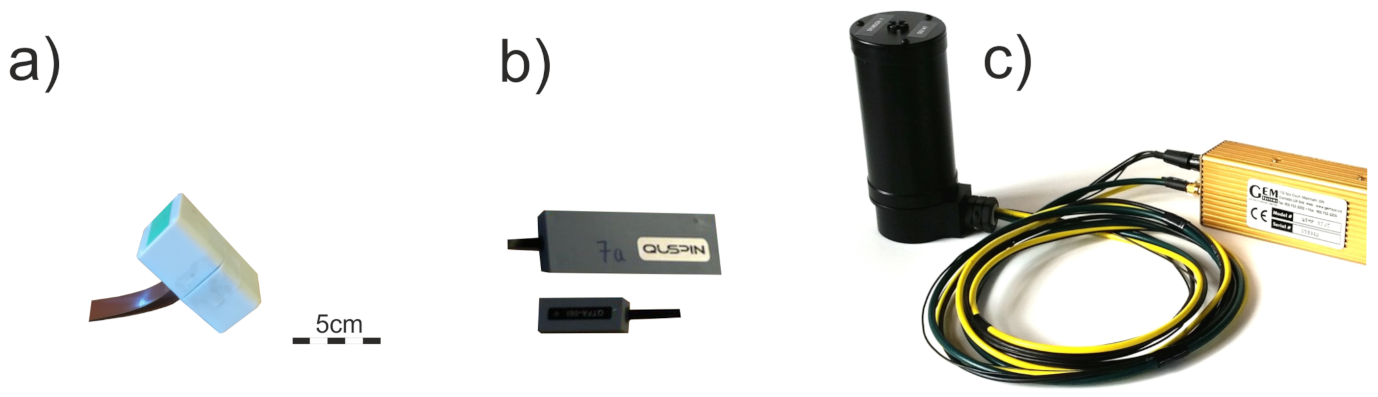
2.2.2. Evaluation of Pre-Selected of Magnetometers
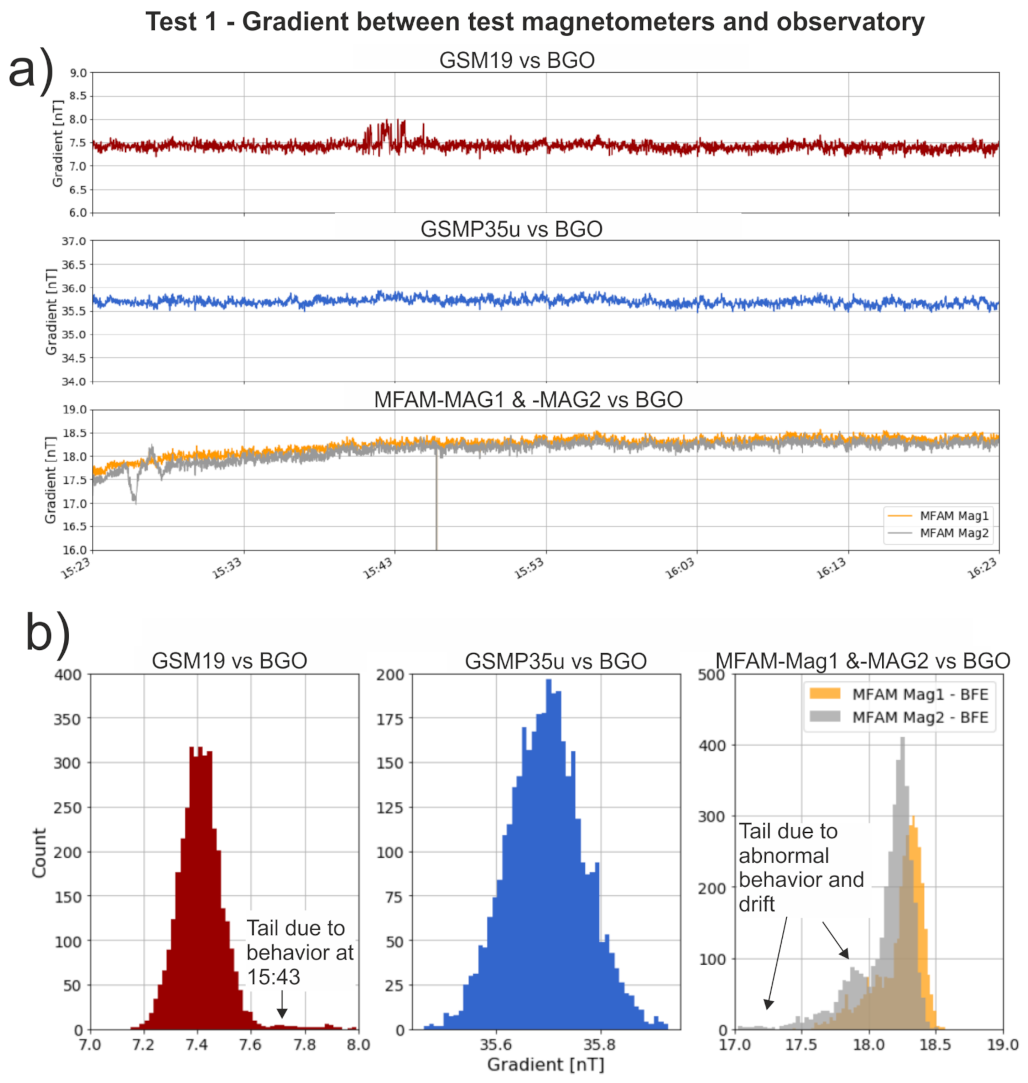
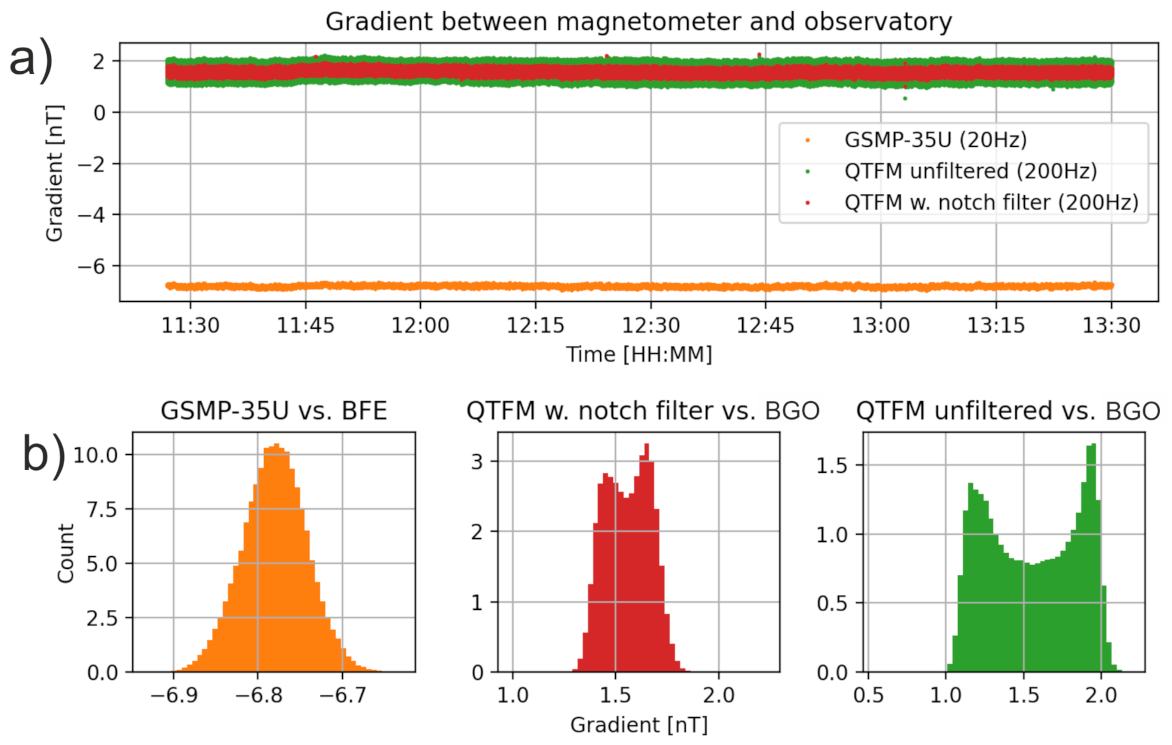
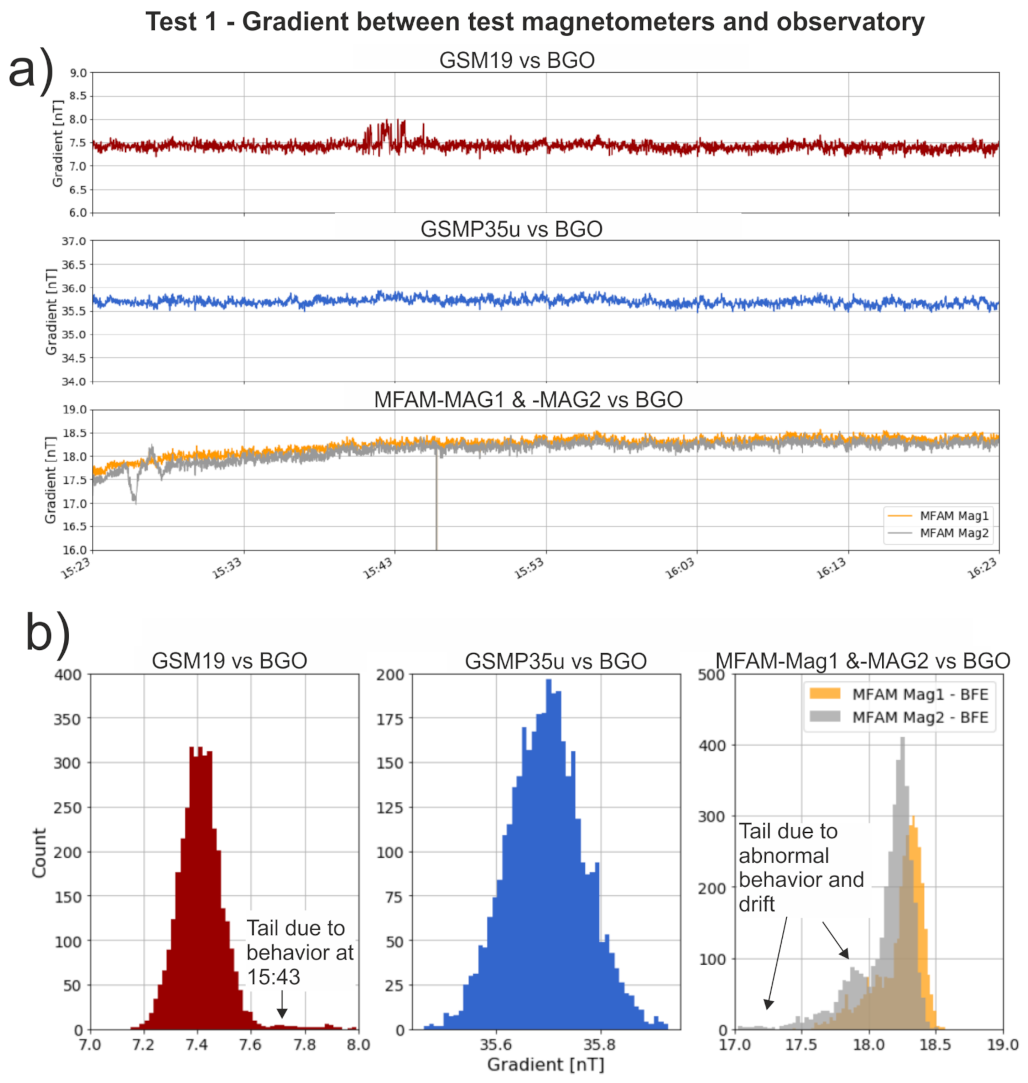
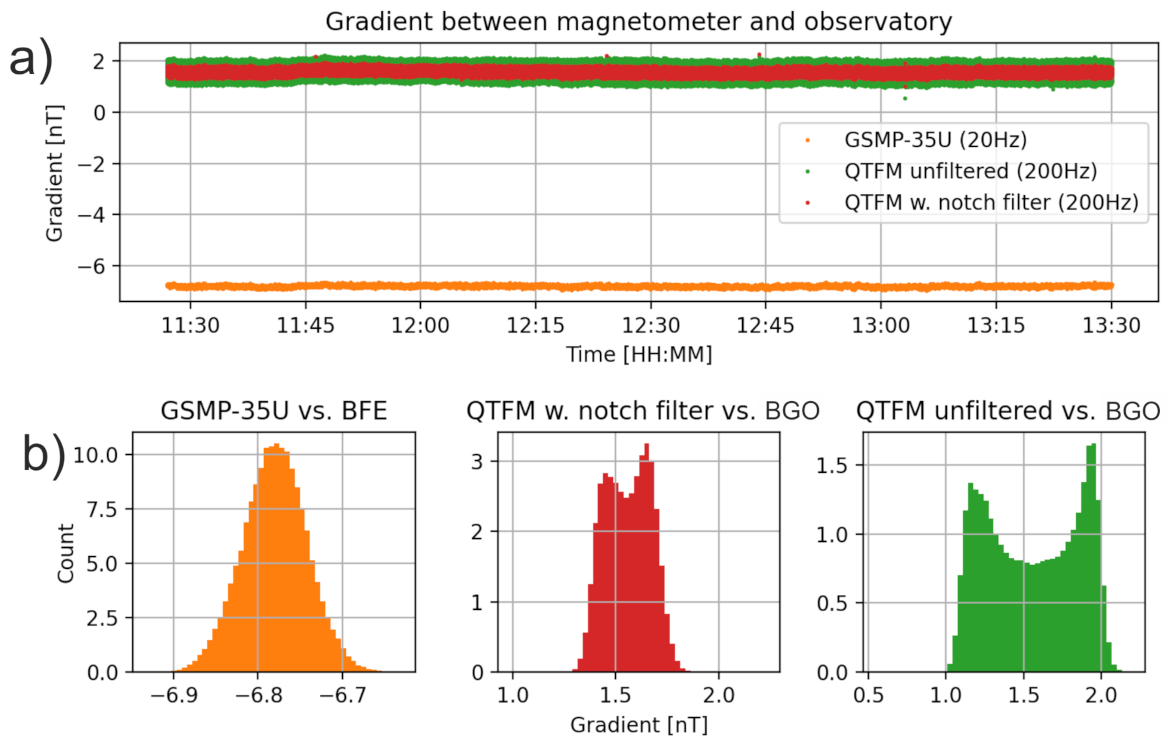
2.2.3. Magnetometer Drift and Reliability—Laboratory Tests
2.2.4. Ease of Mechanical Integration
2.2.5. Summary on Magnetometer Choice
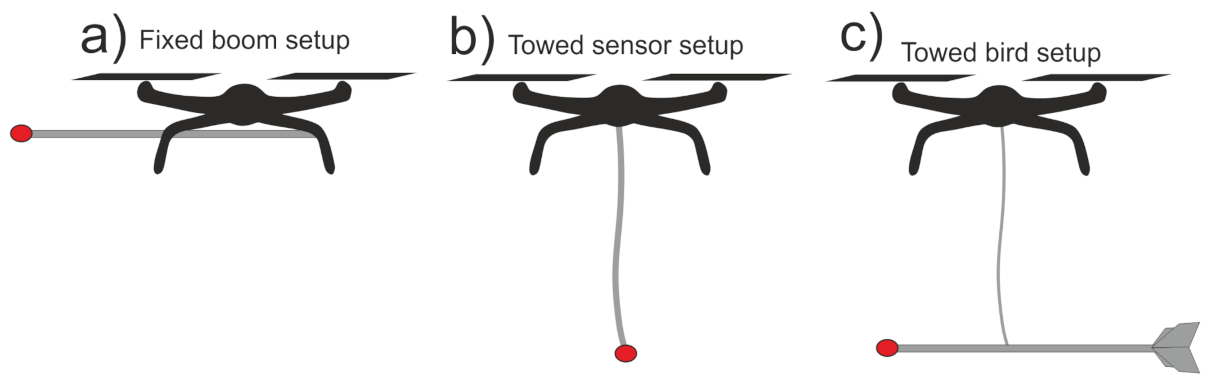
2.3. Design Considerations of the Magnetometer Bird
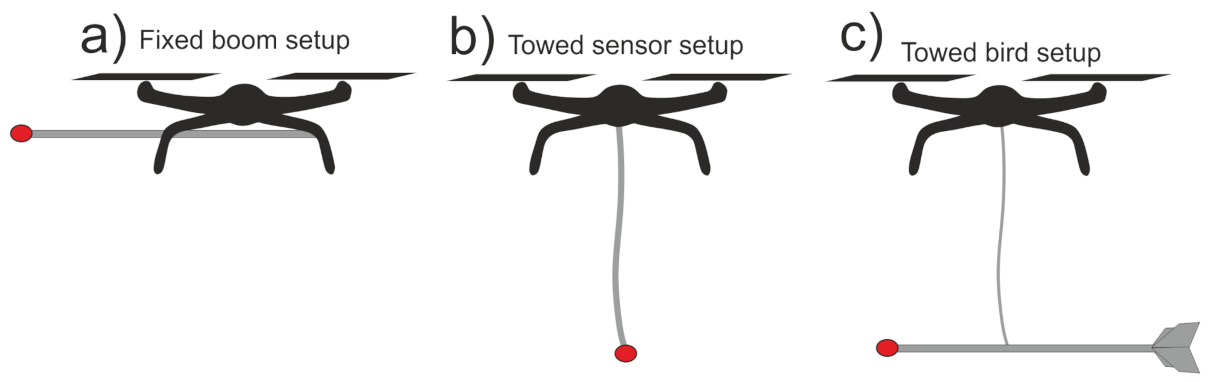
- A towed magnetometer bird assembly, carrying only the sensor head and sensor control box;
- A UAV-affixed assembly, carrying a data logging device connected to the UAV for supply of power and positioning.
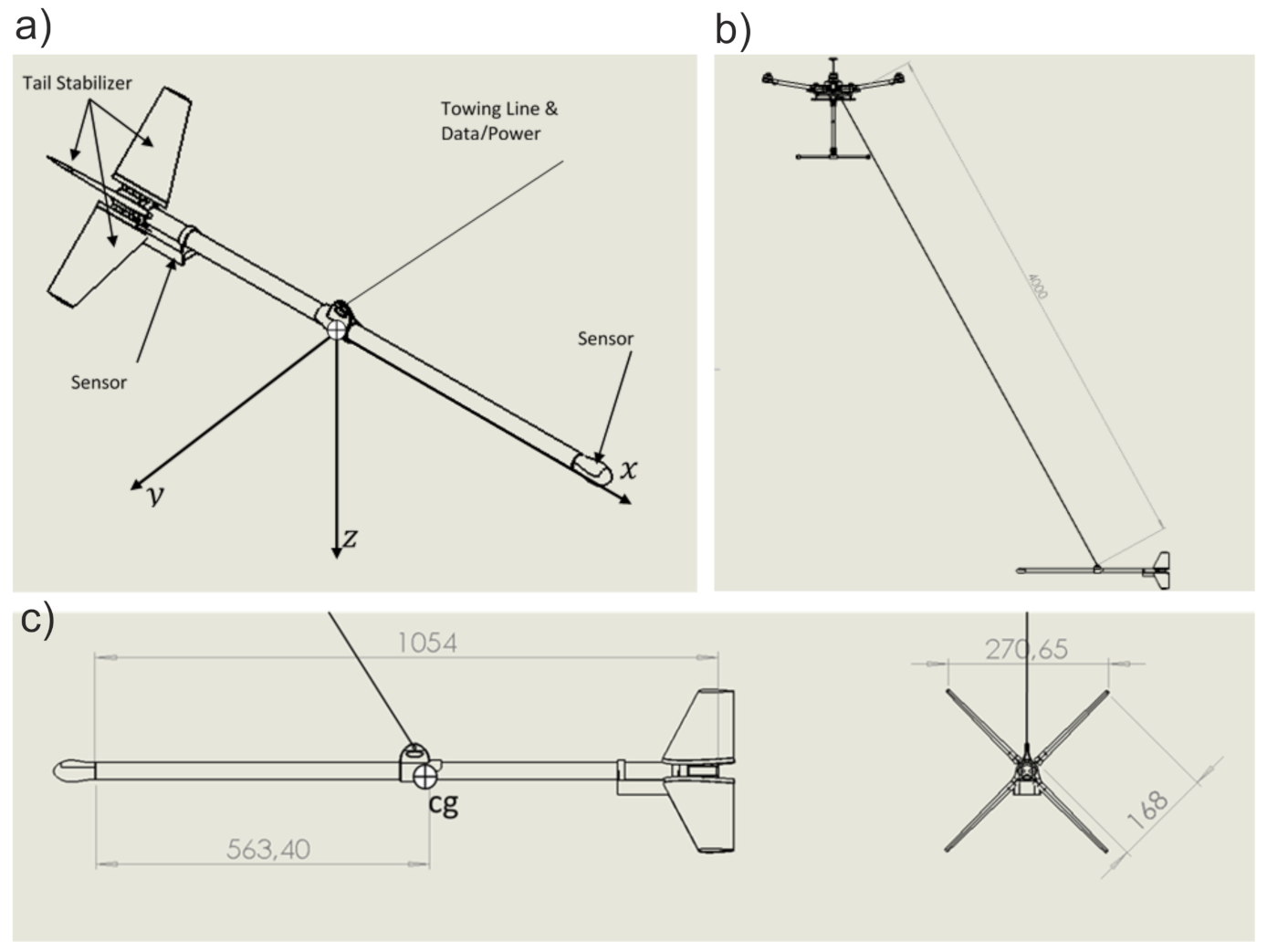
2.3.1. Towed Bird Assembly
2.3.2. UAV-Affixed Assembly
2.3.3. Summary on the Magnetic Survey System
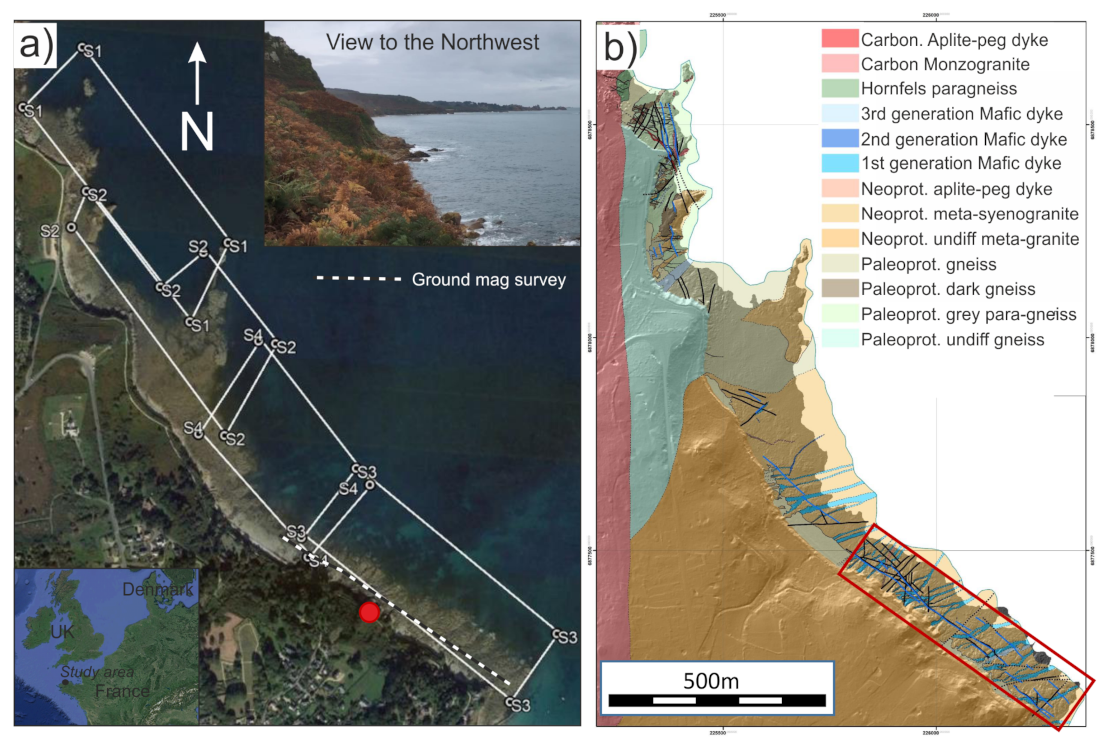
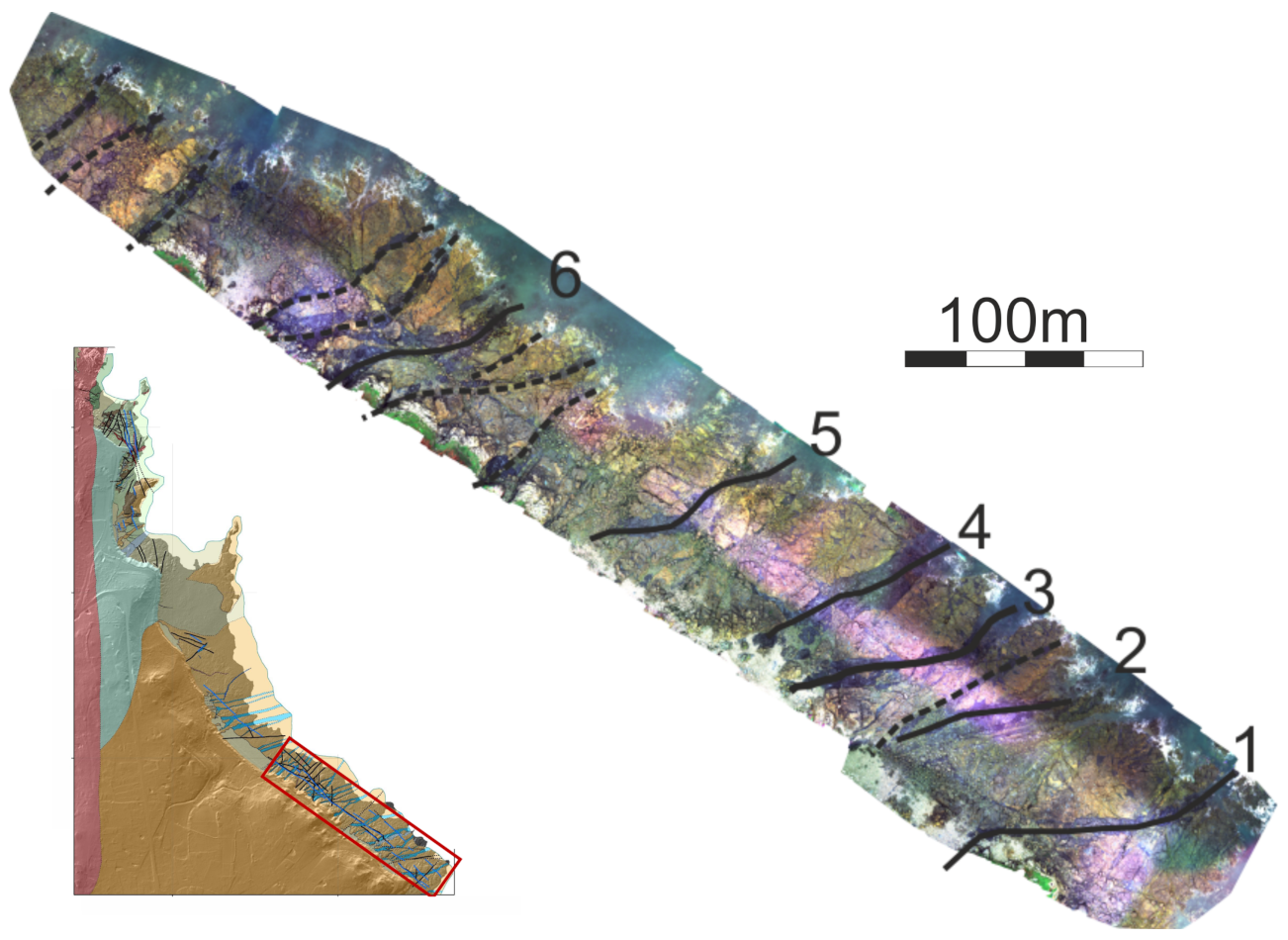
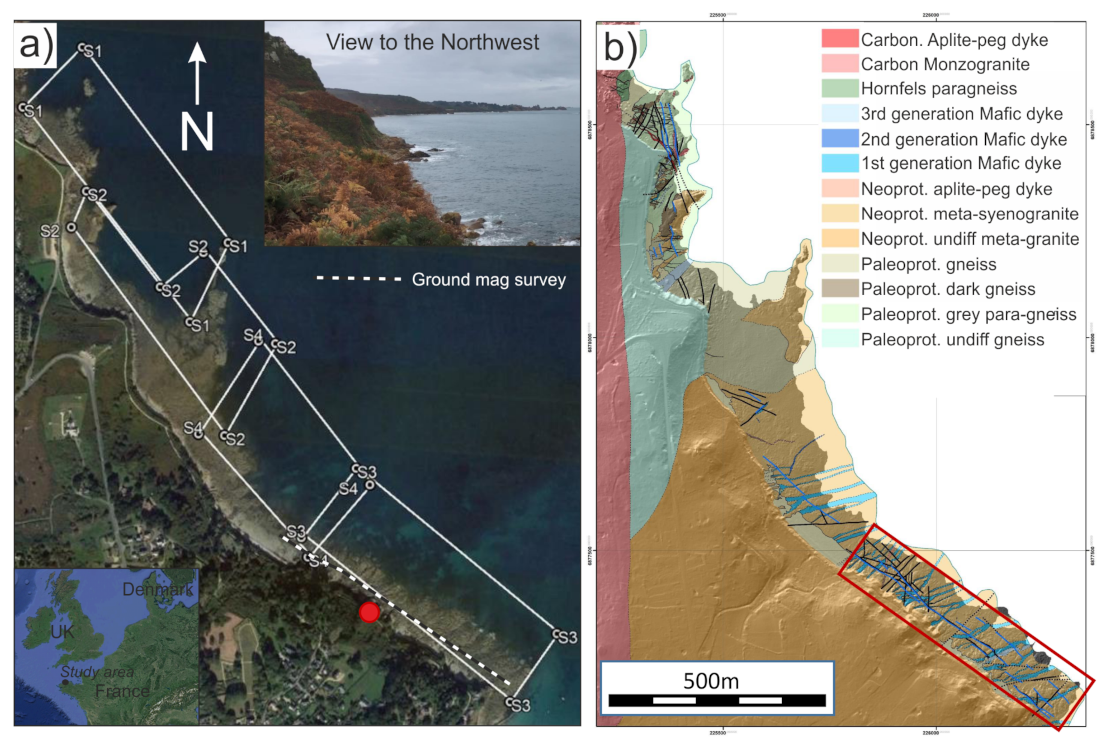
3. Study Area
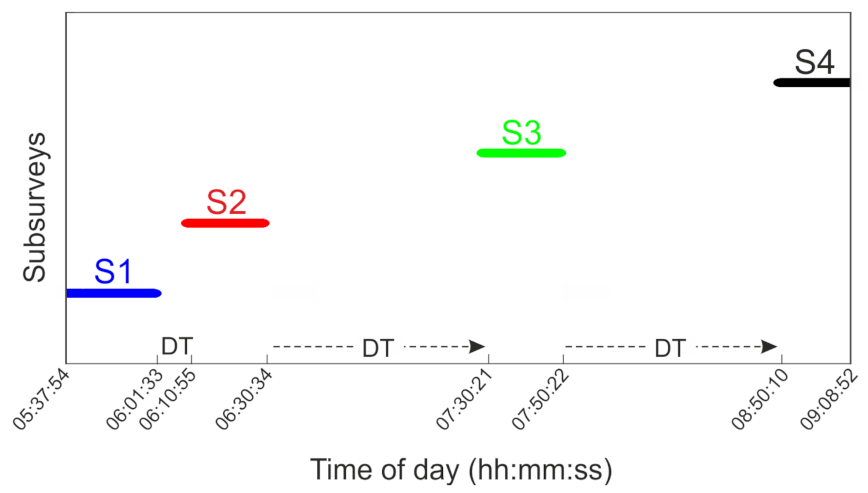
3.1. Operational Complexity
3.2. Geological Setting
4. Data Collection
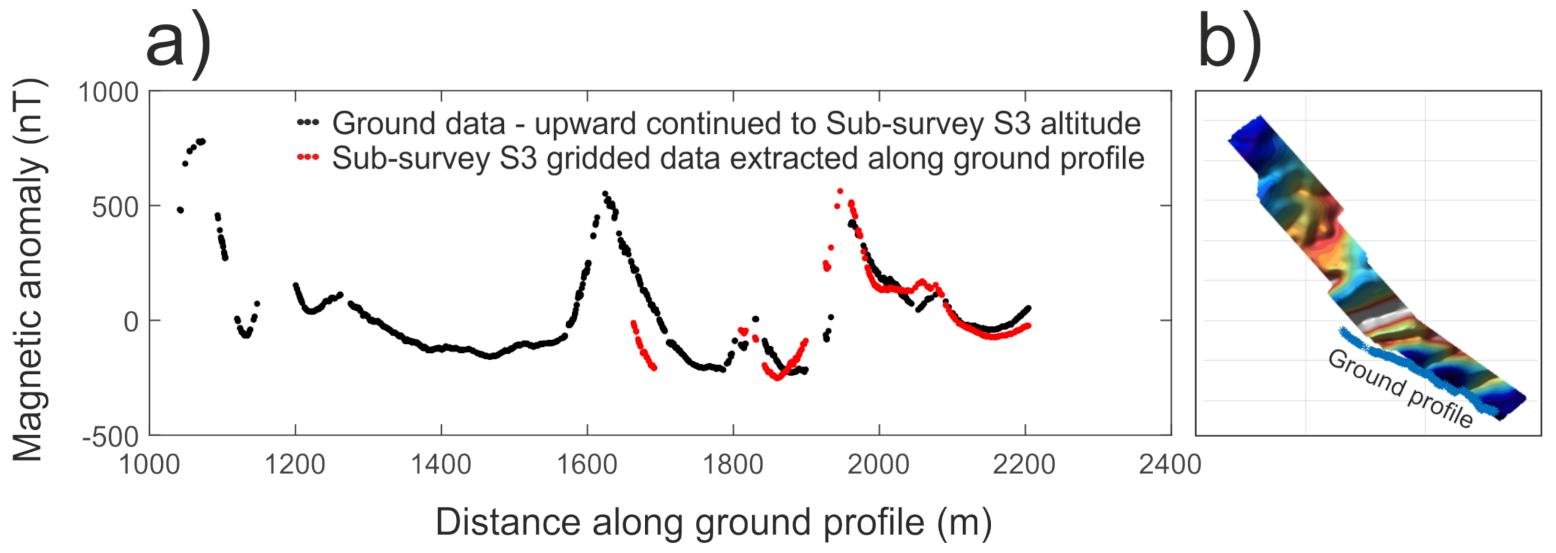
4.1. Ground Magnetic Surveys
4.2. Photogrammetry Survey
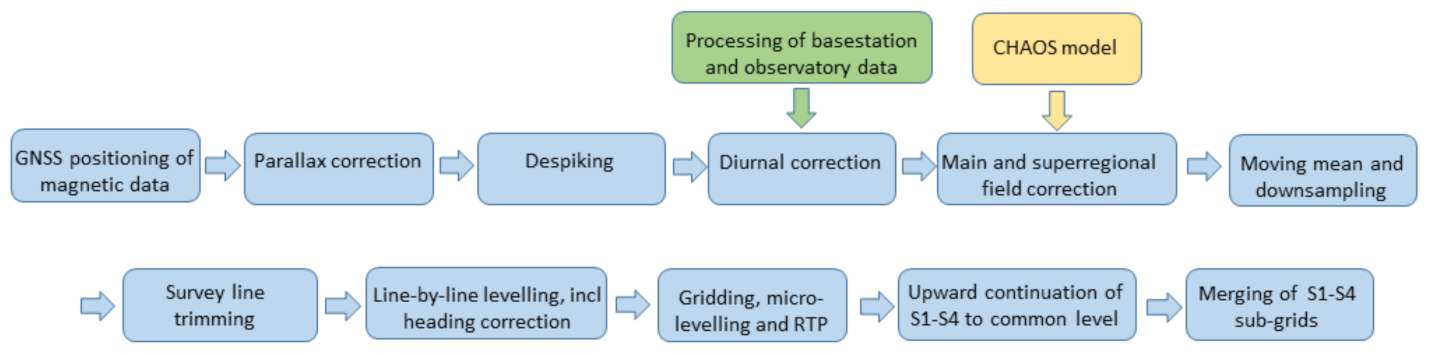
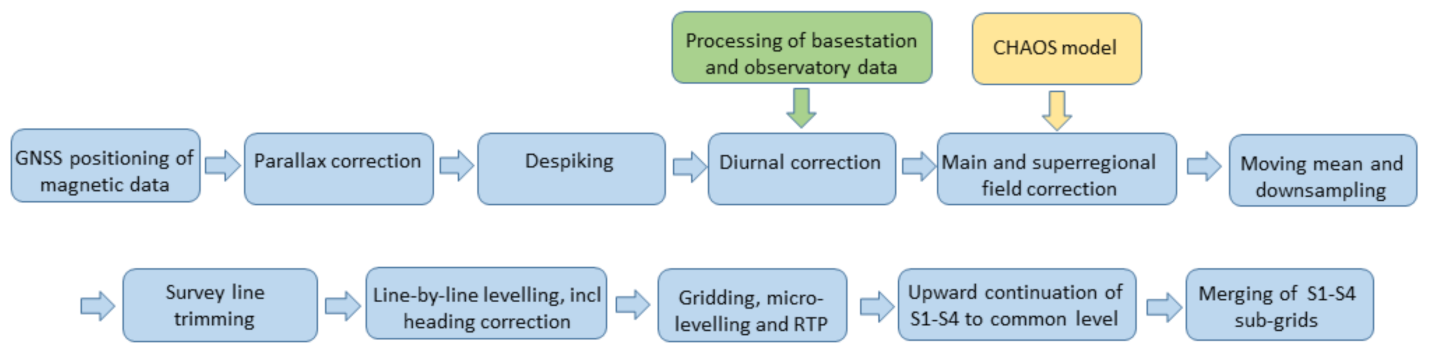
5. Data Processing
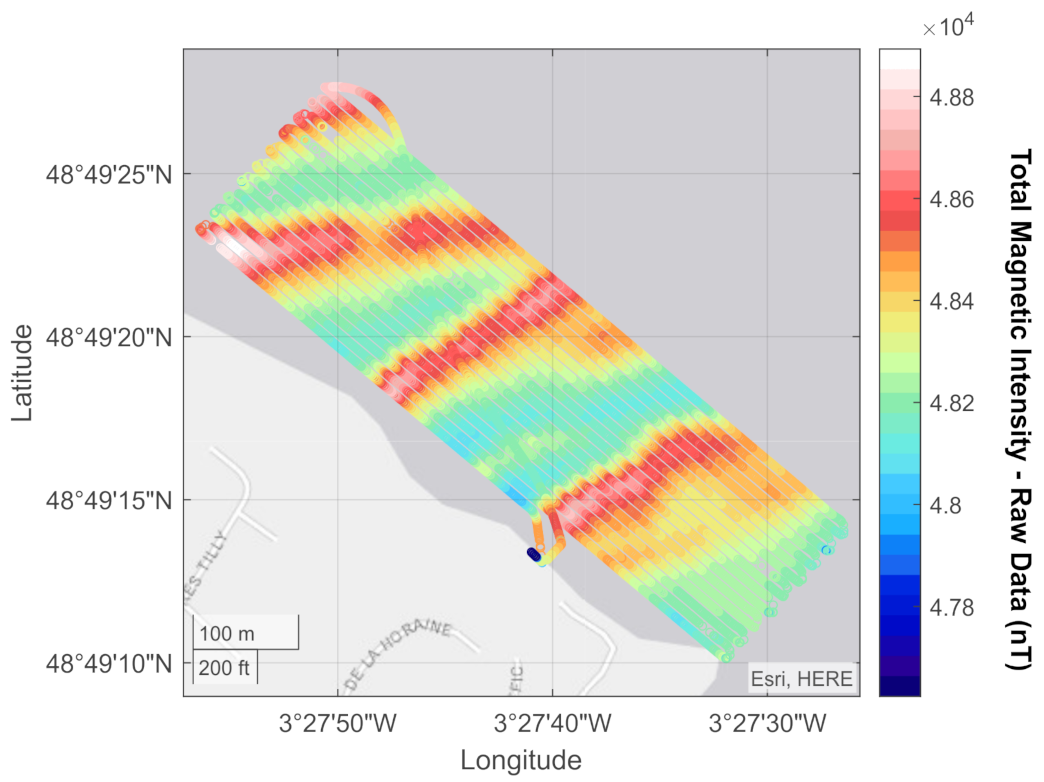
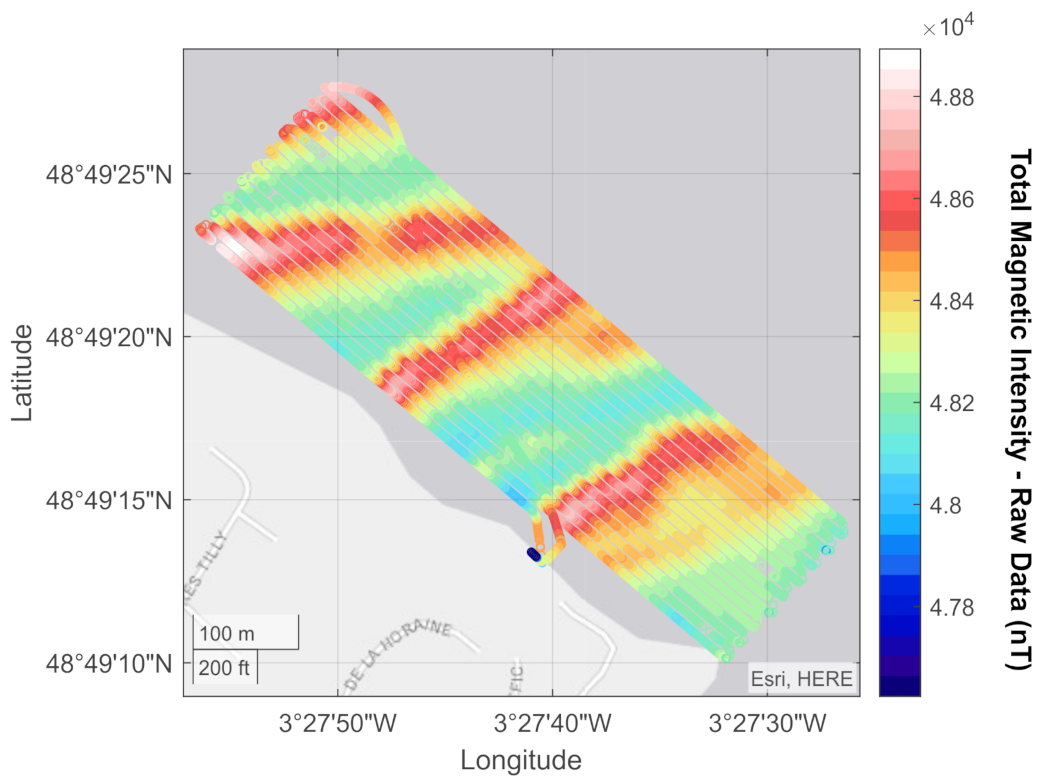
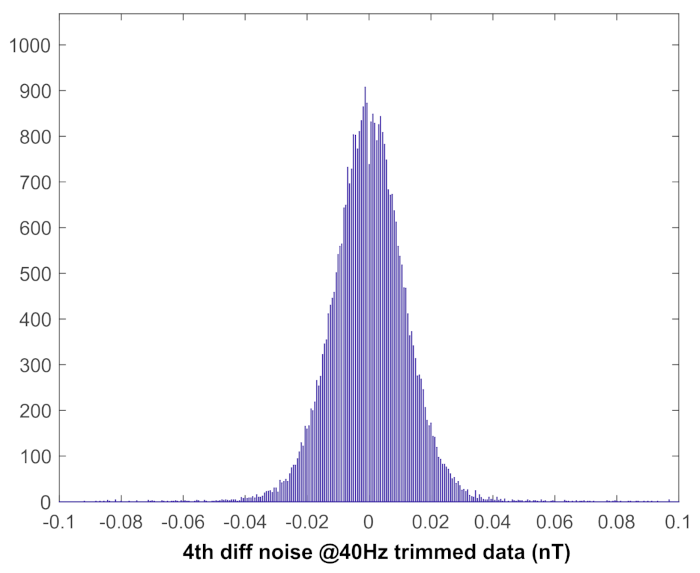
5.1. UAV magnetic data
5.2. Ground Magnetic Data
5.3. Photogrammetry
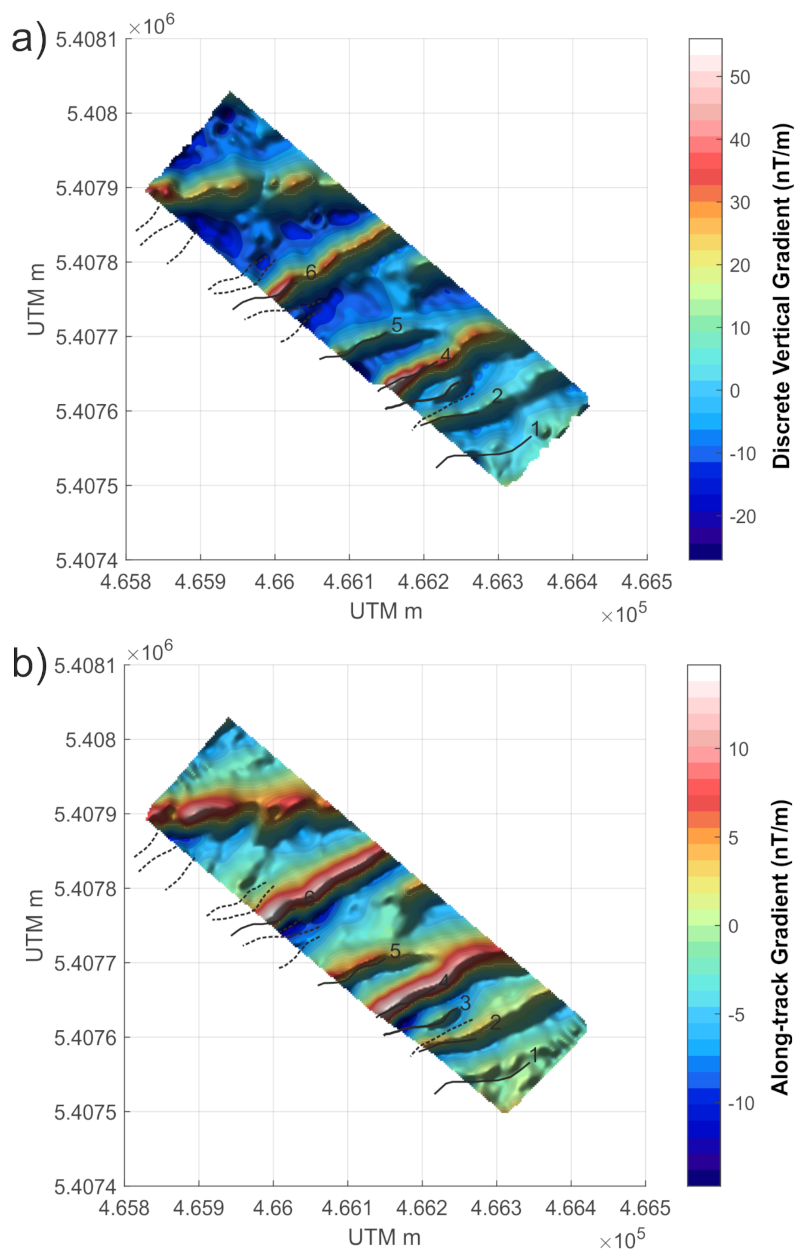
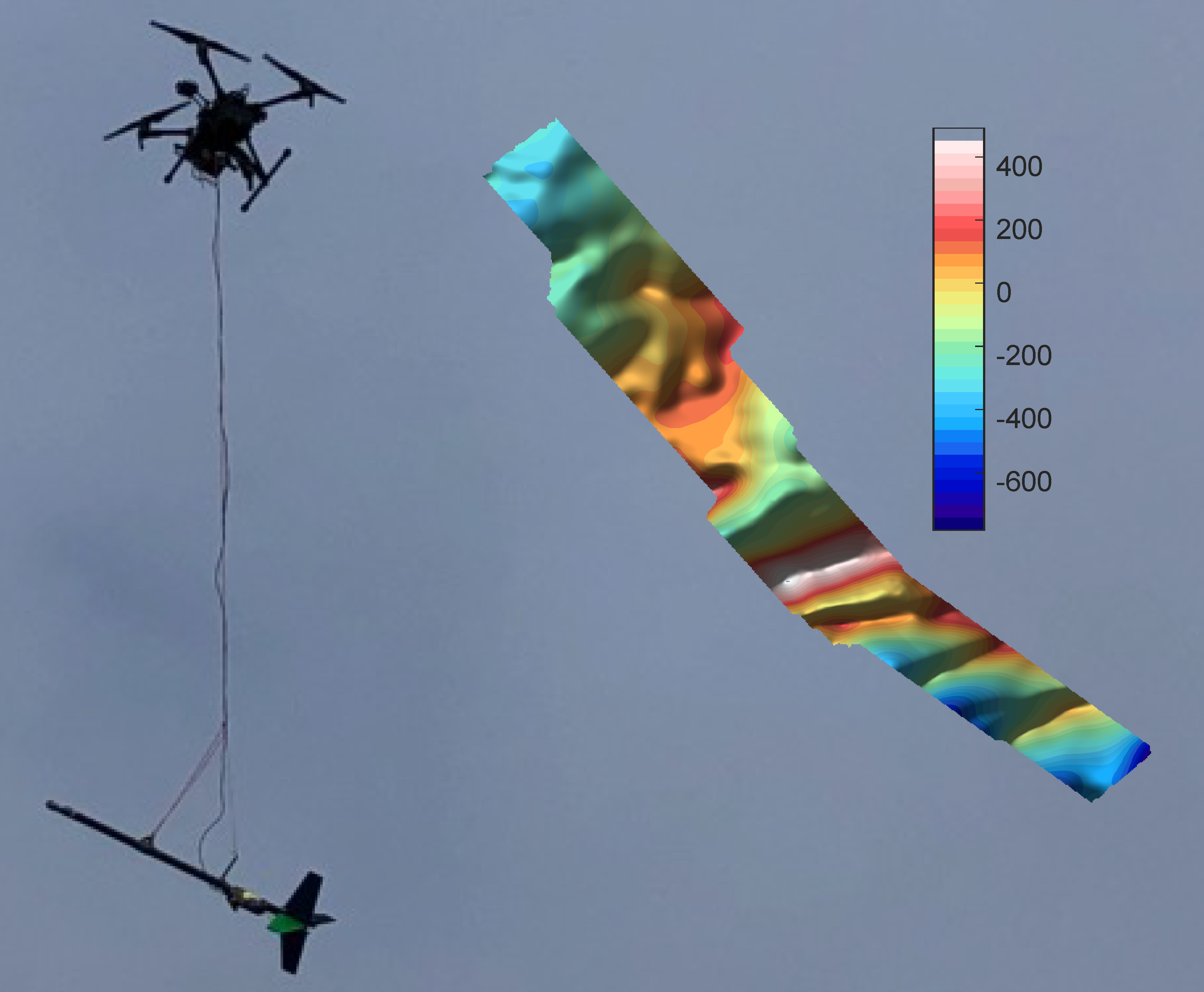
6. Results
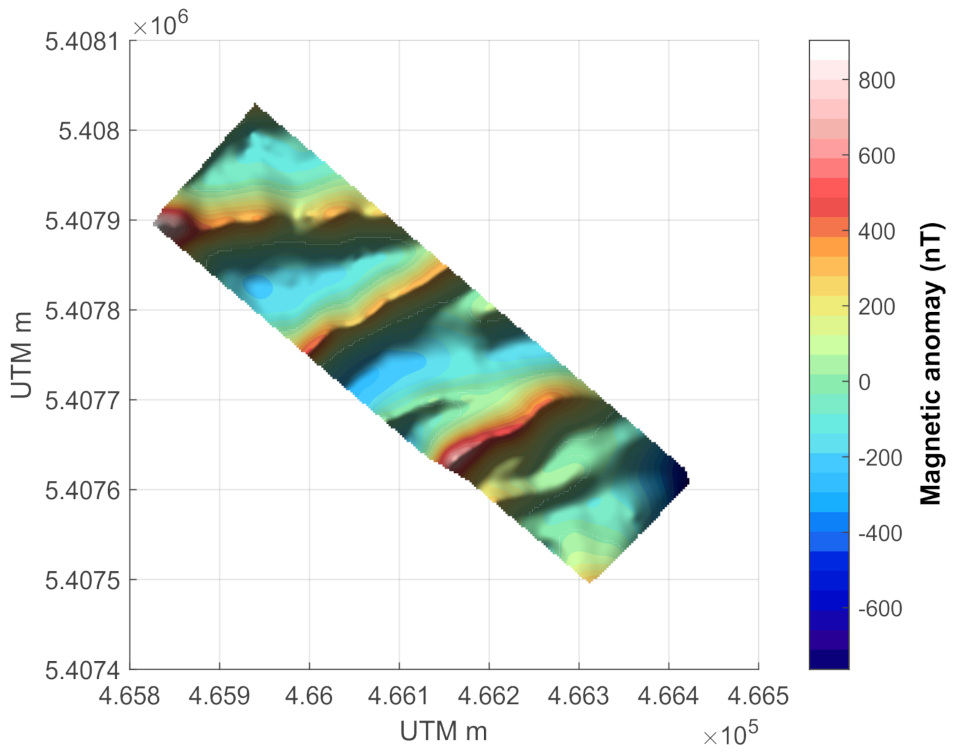
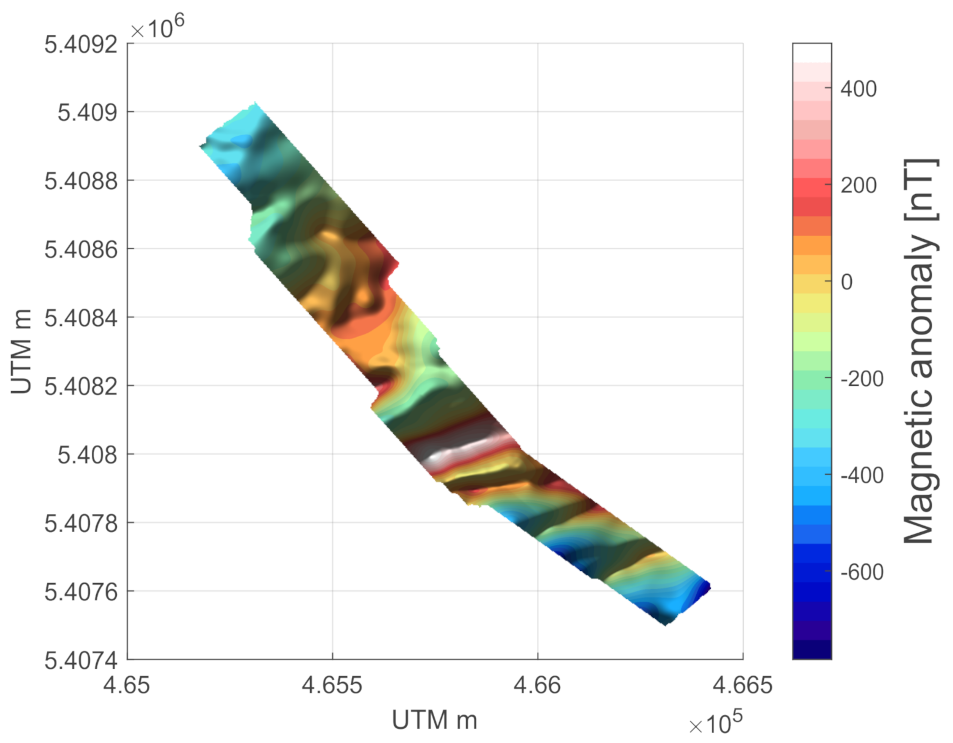
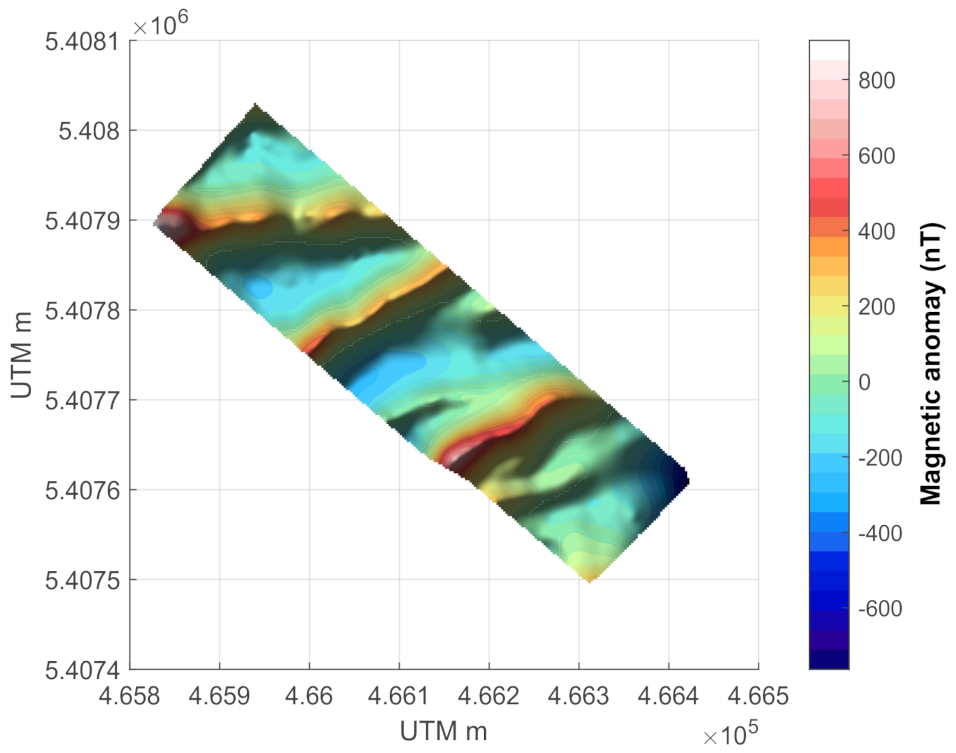
6.1. Merged Anomaly Grid
6.2. Photogrammetry
7. Discussion
7.1. Operational Efficiency and Flexibility of the CMAGTRES-S100
7.2. Quality of Data—Comparison with Ground Magnetic Data and Geology
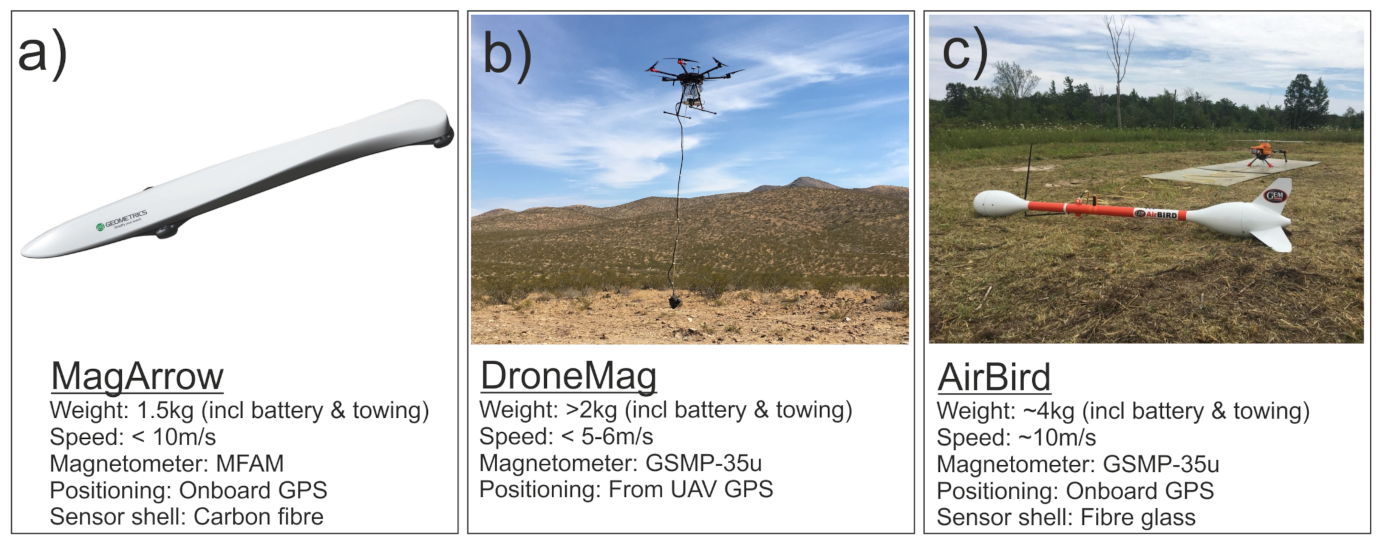
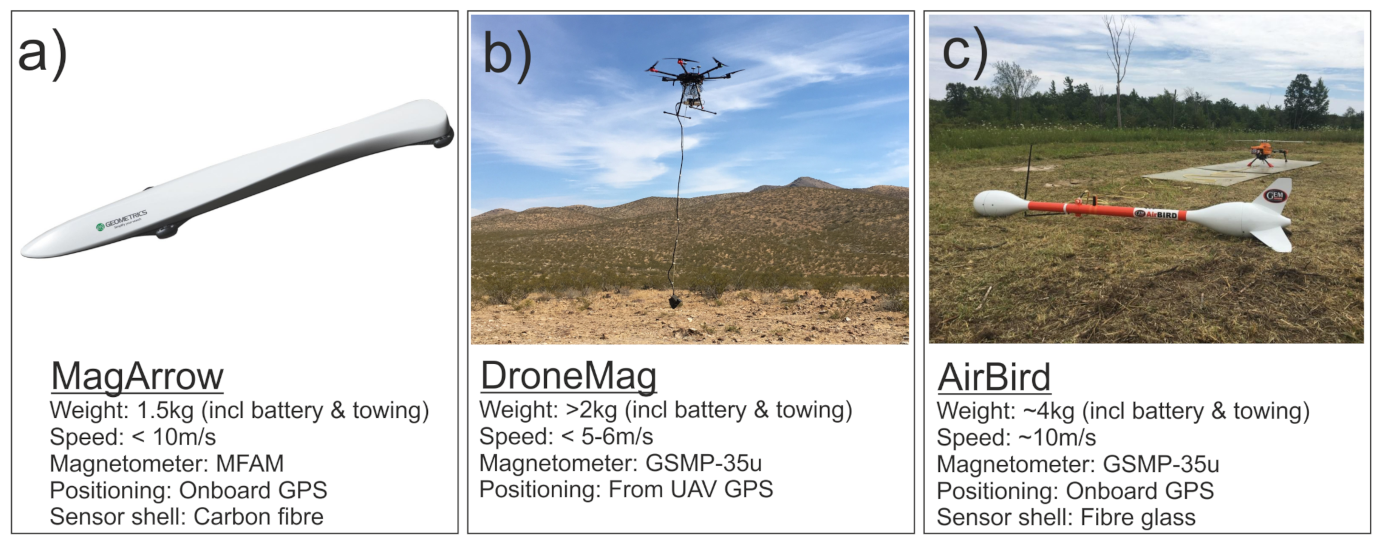
7.3. Benchmarking against Commercially Available Magnetometer Bird Systems
7.4. Further Improvements
8. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cordell, L.; Grauch, V. Mapping basement magnetization zones from aeromagnetic data in the San Juan Basin, New Mexico. In The Utility of Regional Gravity and Magnetic Anomaly Maps; Society of Exploration Geophysicists: Tulsa, OK, USA, 1985; pp. 181–197. [Google Scholar]
- Hood, P.J.; Teskey Dennis, J.T. Aeromagnetic gradiometer program of the Geological Survey of Canada. Geophysics 1989, 8, 1012–1022. [Google Scholar]
- Isles, D.J.; Rankin, L.R. Geological Interpretation of Aeromagnetic Data; Society of Exploration Geophysicists and Australian Society of Exploration: Tulsa, OK, USA, 2013. [Google Scholar]
- Døssing, A.; Jackson, H.R.; Matzka, J.; Einarsson, I.; Rasmussen, T.M.; Olesen, A.V.; Brozena, J. On the origin of the Amerasia Basin and the High Arctic Large Igneous Province—Results of new aeromagnetic data. Earth Planet. Sci. Lett. 2013, 363, 219–230. [Google Scholar] [CrossRef]
- Fassbinder, J.W. Seeing beneath the farmland, steppe and desert soil: Magnetic prospecting and soil magnetism. J. Archaeol. Sci. 2015, 56, 85–95. [Google Scholar] [CrossRef]
- Billings, S.D. Discrimination and classification of buried unexploded ordnance using magnetometry. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1241–1251. [Google Scholar] [CrossRef]
- Philip, H.E. Magnetic Surveying Apparatus. U.S. Patent 2,335,117, 23 November 1943. [Google Scholar]
- Lundberg, H. Results obtained by a helicopter borne magnetometer: Transactions. Can. Inst. Min. Metall. 1947, 50, 392–400. [Google Scholar]
- Dobrin, M.B.; Savit, C.H. Introduction to Geophysical Prospecting; McGraw-Hill: New York, NY, USA, 1960; Volume 4. [Google Scholar]
- Witherly, K. Hans Lundberg: Canada’s (and possibly the World’s) first minerals geophysicist is inducted into the Canadian Mining Hall of Fame. Preview 2020, 2020, 12–16. [Google Scholar] [CrossRef] [Green Version]
- Walter, C.; Braun, A.; Fotopoulos, G. High-resolution unmanned aerial vehicle aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2020, 68, 334–349. [Google Scholar] [CrossRef]
- Wood, A.; Cook, I.; Doyle, B.; Cunningham, M.; Samson, C. Experimental aeromagnetic survey using an unmanned air system. Lead. Edge 2016, 35, 270–273. [Google Scholar] [CrossRef]
- Gavazzi, B.; Le Maire, P.; Munschy, M.; Dechamp, A. Fluxgate vector magnetometers: A multisensor device for ground, UAV, and airborne magnetic surveys. Lead. Edge 2016, 35, 795–797. [Google Scholar] [CrossRef] [Green Version]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Vadim, T.; Alexander, P.; Vasily, A.; Dmitry, K. Unmanned airborne magnetic survey technologies: Present and future. In Recent Advances in Rock Magnetism, Environmental Magnetism and Paleomagnetism; Springer: Berlin/Heidelberg, Germany, 2019; pp. 523–534. [Google Scholar]
- Walter, C.; Braun, A.; Fotopoulos, G. Spectral analysis of magnetometer swing in high-resolution UAV-borne aeromagnetic surveys. In Proceedings of the 2019 IEEE Systems and Technologies for Remote Sensing Applications Through Unmanned Aerial Systems (STRATUS), Rochester, NY, USA, 25–27 February 2019; pp. 1–4. [Google Scholar]
- Kolster, M.E.; Døssing, A. Scalar magnetic difference inversion applied to UAV-based UXO detection. Geophys. J. Int. 2020, 224, 468–486. [Google Scholar] [CrossRef]
- Le Maire, P.; Bertrand, L.; Munschy, M.; Diraison, M.; Géraud, Y. Aerial magnetic mapping with an unmanned aerial vehicle and a fluxgate magnetometer: A new method for rapid mapping and upscaling from the field to regional scale. Geophys. Prospect. 2020, 68, 2307–2319. [Google Scholar] [CrossRef]
- Dentith, M.; Mudge, S.T. Geophysics for the Mineral Exploration Geoscientist; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Edelstein, A. Advances in magnetometry. J. Phys. Condens. Matter 2007, 19, 165217. [Google Scholar] [CrossRef] [Green Version]
- Hovde, D.; Prouty, M.; Hrvoic, I.; Slocum, R. Commercial magnetometers and their application. Opt. Magnetometry 2013, 2013, 387–405. [Google Scholar]
- Nayler, J. Dynamics of Atmospheric Flight, Bernard Etkin. Aeronaut. J. 1973, 77, 102. [Google Scholar]
- Auvray, B. Genèse et Evolution de la Croûte Continentale dans le Nord du Massif Armoricain. Ph.D. Thesis, Rennes University, Rennes, France, 1979. [Google Scholar]
- Chauris, L. A fissural pseudo-skarn with molybdenite and scheelite: Kerdu en Perros-Guirec (Massif Armoricain). Bull. De La Soci ’e T É Des Sci. Nat. De L’Ouest De La Fr. (1983) 1991, 13, 41–50. [Google Scholar]
- Egal, E.; Guerrot, C.; Le Goff, E.; Thiéblemont, D.; Chantraine, J. The Cadomian orogeny revisited in northern Brittany (France). Spec. Pap.-Geol. Soc. Am. 1996, 394, 281–318. [Google Scholar]
- Barboni, M.; Schoene, B.; Ovtcharova, M.; Bussy, F.; Schaltegger, U.; Gerdes, A. Timing of incremental pluton construction and magmatic activity in a back-arc setting revealed by ID-TIMS U/Pb and Hf isotopes on complex zircon grains. Chem. Geol. 2013, 342, 76–93. [Google Scholar] [CrossRef]
- Guennoc P., Feybesse J.-L. Explanatory note of the geological map of France 1: 50 000 scale. Perros Guirec sheet (170) 2015. [Google Scholar]
- Pochon, A.; Poujol, M.; Gloaguen, E.; Branquet, Y.; Cagnard, F.; Gumiaux, C.; Gapais, D. U-Pb LA-ICP-MS dating of apatite in mafic rocks: Evidence for a major magmatic event at the Devonian-Carboniferous boundary in the Armorican Massif (France). Am. Mineral. 2016, 101, 2430–2442. [Google Scholar] [CrossRef]
- Finlay, C.C.; Kloss, C.; Olsen, N.; Hammer, M.D.; Tøffner-Clausen, L.; Grayver, A.; Kuvshinov, A. The CHAOS-7 geomagnetic field model and observed changes in the South Atlantic Anomaly. Earth, Planets Space 2020, 72, 1–31. [Google Scholar] [CrossRef] [PubMed]
- White, J.C.; Beamish, D. Levelling aeromagnetic survey data without the need for tie-lines. Geophys. Prospect. 2015, 63, 451–460. [Google Scholar] [CrossRef] [Green Version]
- Minty, B. Simple micro-levelling for aeromagnetic data. Explor. Geophys. 1991, 22, 591–592. [Google Scholar] [CrossRef] [Green Version]
- Minty, B.R.; Milligan, P.R.; Luyendyk, T.; Mackey, T. Merging airborne magnetic surveys into continental-scale compilations. Geophysics 2003, 68, 988–995. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Coyle, M.; Dumont, R.; Keating, P.; Kiss, F.; Miles, W. Geological Survey of Canada Aeromagnetic Surveys: Design, Quality Assurance, and Data Dissemination; Geological Survey of Canada: Ottawa, OT, Canada, 2014; 48p. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surveying speed | ∼14 m/s |
| Sensor type | Total-field (scalar) |
| Sensor sampling rate | Minimum 10–20 Hz |
| Maximum weight, incl. UAV and batteries | 6–7 kg |
| Name | GSMP-35u | MFAM | QTFM |
|---|---|---|---|
| Type | Potassium | Caesium | Rubidium |
| Sensitivity (pT) | 0.3@1Hz/3@20Hz | 7/ | 1/ |
| Resolution (nT) | 0.0001 | 0.0001 | NA |
| Absolute Accuracy (nT) | ±0.1 | NA | NA |
| Dead Zones () | ±10 Po/±10 Eq | ±35 Po * | ±7 Eq |
| Heading Error (nT) | ±0.05 | ±7.5 | <±1.5 |
| Dynamic Range (nT) | 15,000–120,000 | 20,000–100,000 | 1000–100,000 |
| Gradient Tolerance (nT/m) | 50,000 | NA | 10,000 |
| Sampling Rate (Hz) | 1–20 Hz | 1000 | max 400 |
| Power consumption (W) | 12 | 1–2 | 2 |
| Total weight (g) (excl cables) | 1000 | 230 | 150 |
| Sensor head dimensions (cm) | 16.1/6.4 | 3.3/2.5/3.2/ | 1.9/1.9/4.7 |
| Sensor control box dimensions (cm) | 23.6/5.6/3.9 | 12.0/5.2/2.2 | 1.9/3.5/8.9 |
| Magnetometer type | Compatible with a Quspin QTFM magnetometer. |
| Magnetometer integration | Rigidly affix the sensor head and control box and ensure a minimum stand-off distance from the sensor head to any on-board electronics of at least 1 m. |
| Materials and Weight | Manufactured by low-weight materials to ensure a total payload weight below ∼1200 g (incl bird, cables, magnetometer, logging device, power supply and positioning). |
| Sensor head shell | Manufactured exclusively with non-magnetic/non-conductive materials. |
| Surveying speed | Statically and dynamically stable in roll, pitch and yaw at minimum 14 m/s forward flight, without requiring any control input or automatic actuation. |
| UAV | Compatible with the medium-sized DJI M210. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Døssing, A.; Lima Simoes da Silva, E.; Martelet, G.; Maack Rasmussen, T.; Gloaguen, E.; Thejll Petersen, J.; Linde, J. A High-Speed, Light-Weight Scalar Magnetometer Bird for km Scale UAV Magnetic Surveying: On Sensor Choice, Bird Design, and Quality of Output Data. Remote Sens. 2021, 13, 649. https://doi.org/10.3390/rs13040649
Døssing A, Lima Simoes da Silva E, Martelet G, Maack Rasmussen T, Gloaguen E, Thejll Petersen J, Linde J. A High-Speed, Light-Weight Scalar Magnetometer Bird for km Scale UAV Magnetic Surveying: On Sensor Choice, Bird Design, and Quality of Output Data. Remote Sensing. 2021; 13(4):649. https://doi.org/10.3390/rs13040649
Chicago/Turabian StyleDøssing, Arne, Eduardo Lima Simoes da Silva, Guillaume Martelet, Thorkild Maack Rasmussen, Eric Gloaguen, Jacob Thejll Petersen, and Johannes Linde. 2021. "A High-Speed, Light-Weight Scalar Magnetometer Bird for km Scale UAV Magnetic Surveying: On Sensor Choice, Bird Design, and Quality of Output Data" Remote Sensing 13, no. 4: 649. https://doi.org/10.3390/rs13040649
APA StyleDøssing, A., Lima Simoes da Silva, E., Martelet, G., Maack Rasmussen, T., Gloaguen, E., Thejll Petersen, J., & Linde, J. (2021). A High-Speed, Light-Weight Scalar Magnetometer Bird for km Scale UAV Magnetic Surveying: On Sensor Choice, Bird Design, and Quality of Output Data. Remote Sensing, 13(4), 649. https://doi.org/10.3390/rs13040649