
Bottom Detection from Backscatter Data of Conventional Side Scan Sonars through 1D-UNet


Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- The interference factors of bottom detection, including compensation with unknown gains, sonar self-noise and vessel noise, suspended objects in the water column, and targets on the seabed, are introduced in detail.
- A well-designed 1D-UNet model for the bottom detection of the side-scan backscatter sequences is proposed and validated in the experiment with high accuracies and good robustness to the interference factors.
- The proposed bottom detection and tracking method of side-scan data has been proved to have fully real-time performance and show potentials in wider applications on other types of sonars.
2. Theory and Method
2.1. Bottom Detection of Conventional Side-Scan Sonars and Main Interference Factors
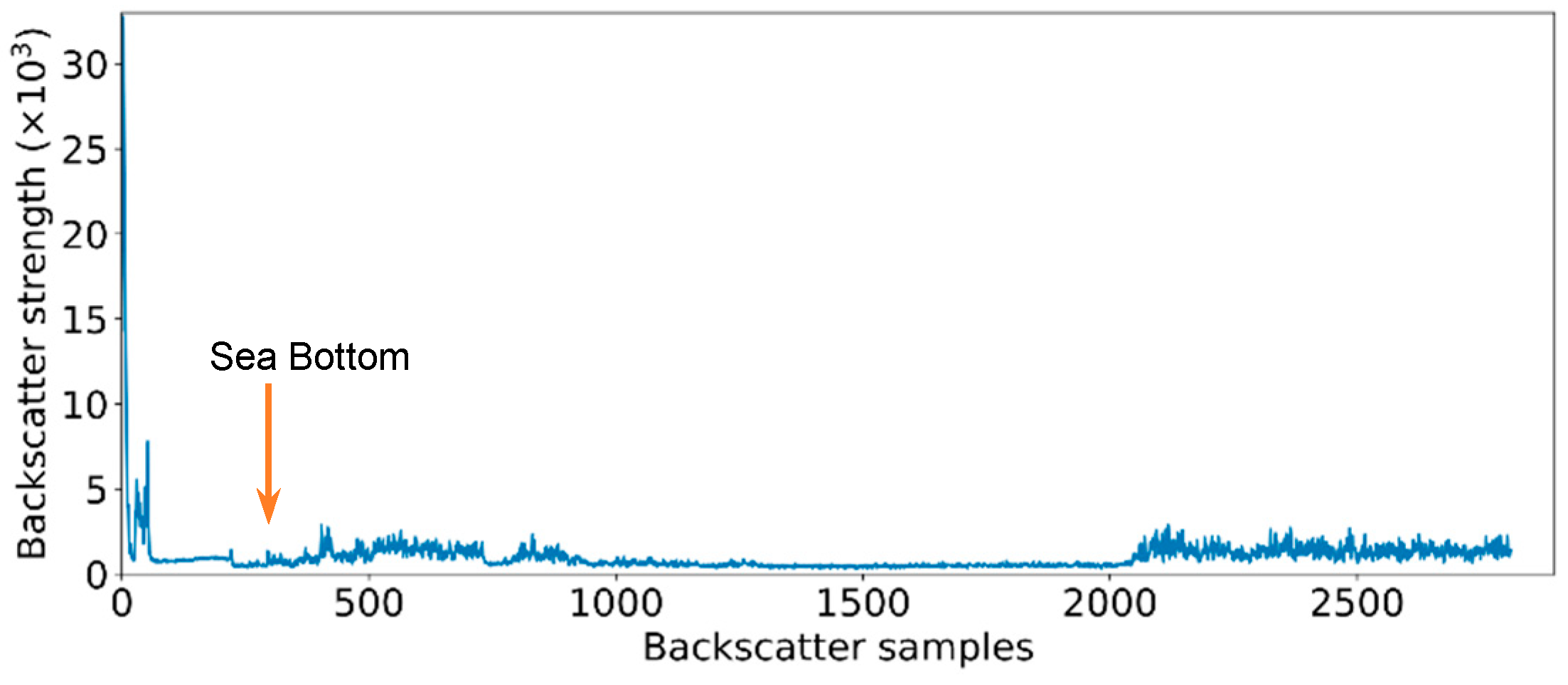
- Unknown gain. During the sound propagation, the level of the sound wave gradually decreases due to the effect of propagation loss. When the sound wave reaches the sea bottom, the transducer will record a high-level echo, which shows the sea bottom position. Given that the side-scan sonars are mainly used for obtaining seabed images, time-varying gains are applied on the side-scan backscatter samples to make the strengths uniform. In many cases, the gains are unknown because the instrument does not provide it, or the operator does not record it. The unknown gain will cause the echoes arriving at the sea bottom to be no longer the highest-level echoes, which brings problems to the traditional methods.
- Sonar self-noise and vessel noise. The self-noises of side-scan sonars include the noises of the sonar itself (such as ringing error) and the survey ship. In some shallow waters, the ship noise will also bring great influence to the side-scan sonar when the side-scan sonar is installed on the ship or towed near the ship. This type of noise is mainly concentrated within a certain range after the sound is emitted.
- Suspended objects in the water column. Fishes, marine suspended matters, bubbles, and other suspended objects may appear and bring effects on bottom detection during the sound wave propagates on the water column before reaching the seabed. The echoes from these suspended objects have a relatively larger sound level than echoes from water, which shows a similar strength variation when the sound reaches the sea bottom. Thus, the suspended objects in the water column are potential influencing factors.
- Targets on the seabed. After the sound reaches the seabed, the side-scan sonar will continuously record the backscatter strengths of echoes from the seabed, which are used for constructing the seabed sonar image. When a target appears on the seabed, the echoes from the target could have a much larger sound level than echoes for the surrounding seabed and would be an influencing factor of bottom detection.
- Random noises and exceptional situations. Random noises are also likely to produce abnormally strong-level echoes, similar to echoes when the sound hits the sea bottom. In exceptional situations, side-scan sonar data may be recorded incomplete or completely missing. These situations can also cause problems in the bottom detection of side-scan sonar data.
2.2. 1D-UNet for Bottom Detection
2.2.1. Samples
2.2.2. Structure of 1D-UNet
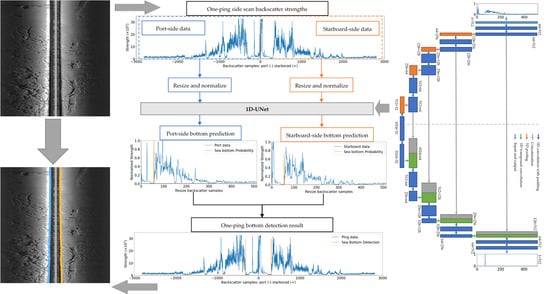
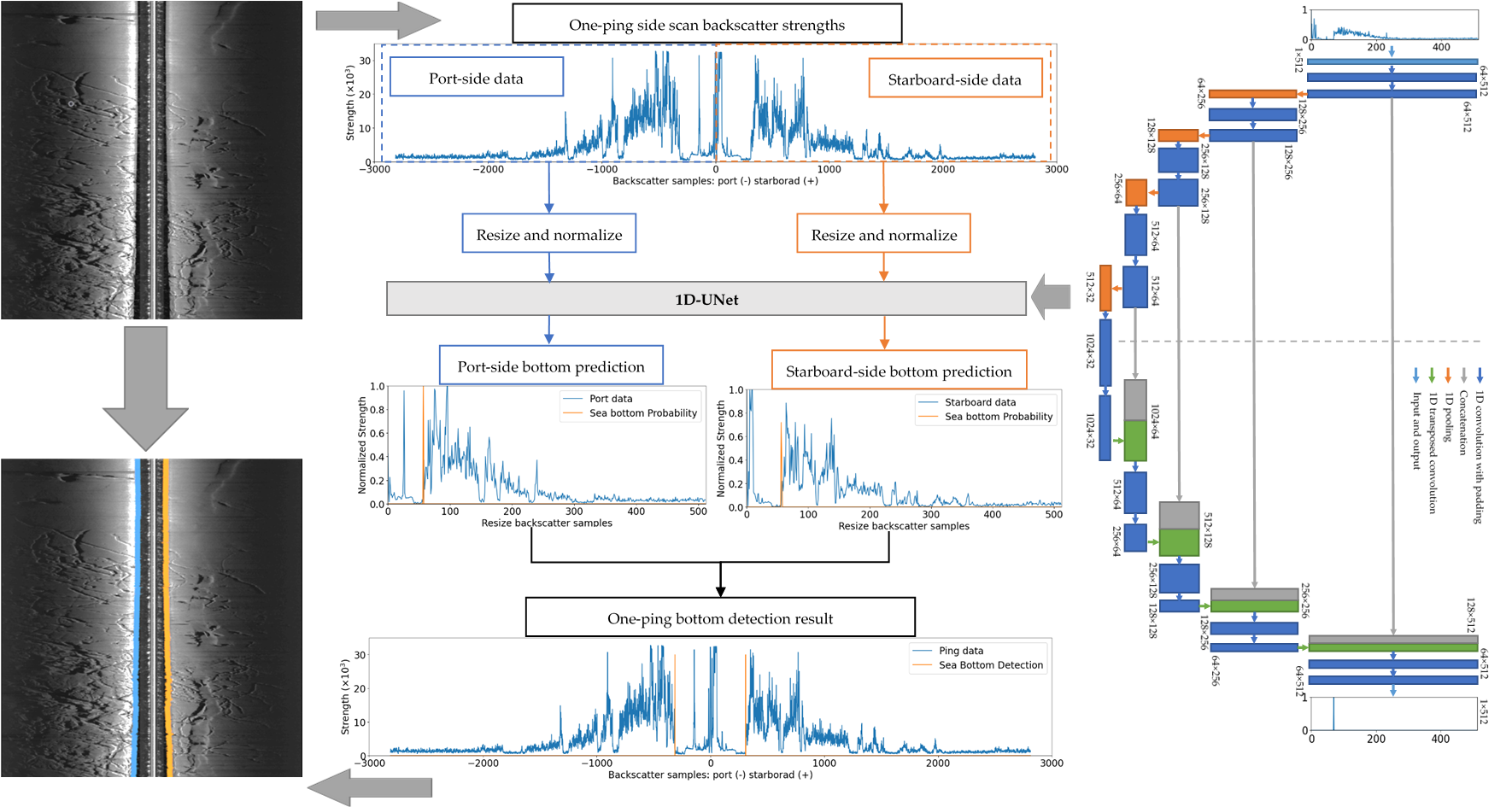
2.3. Sea Bottom Detection and Tracking of Side-Scan Pings
3. Experiment and Results
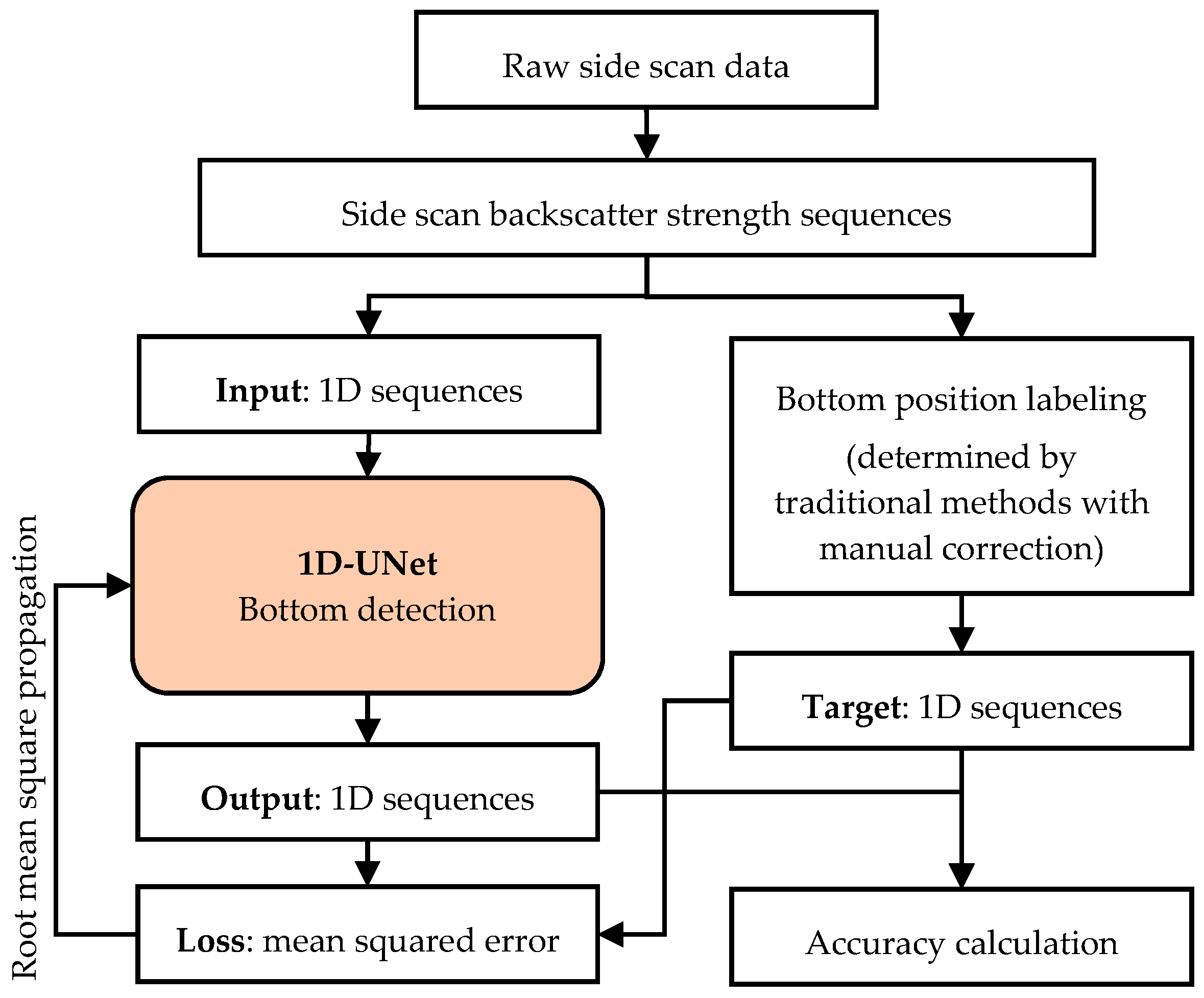
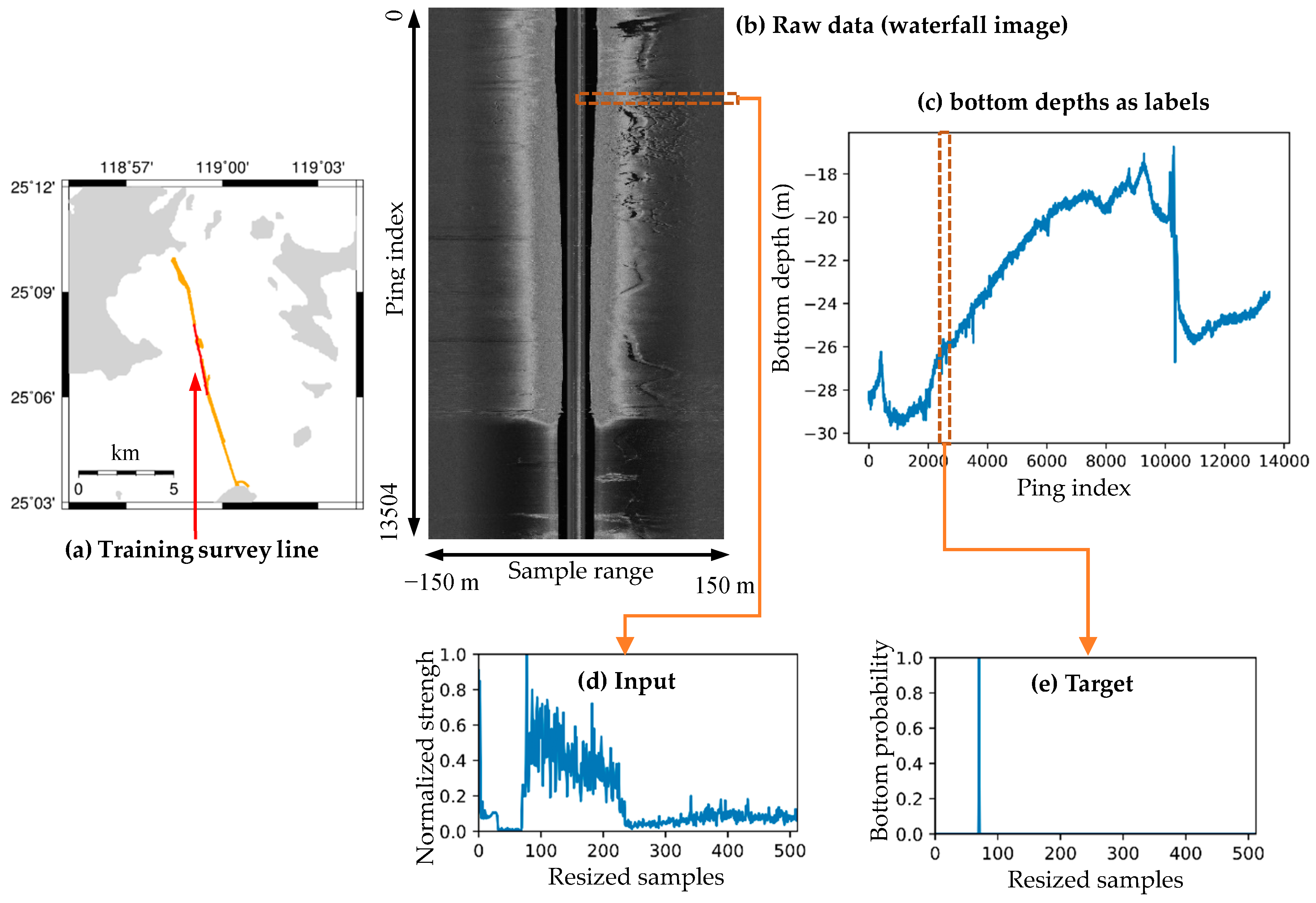
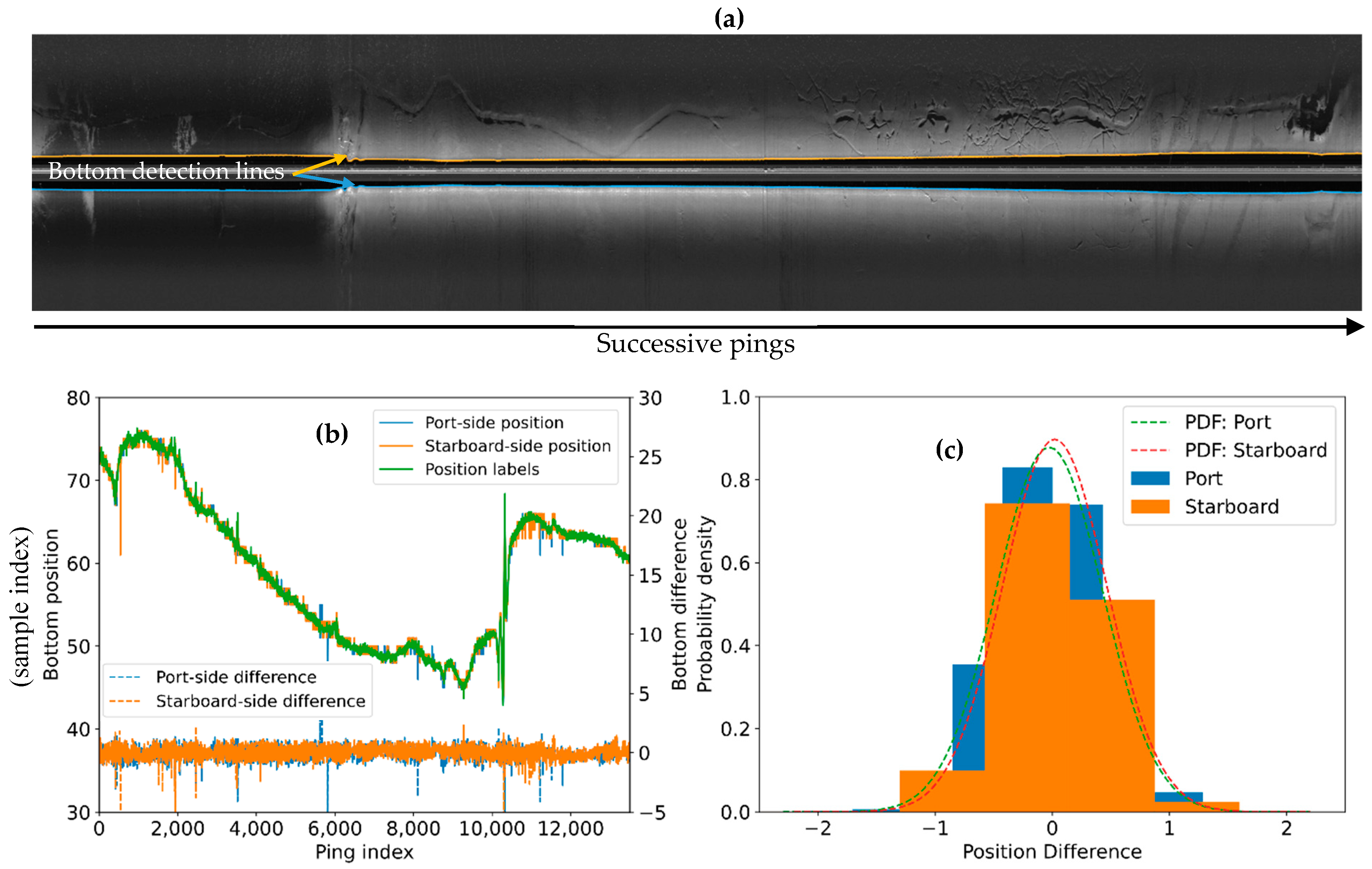
- Training and validation of 1D-UNet. The side-scan data containing 13,504 pings from a survey line in Meizhou Bay were selected for the 1D-UNet training and validation. The sampling and training processes were given in detail. The predicted bottom results were compared with the target bottom results, and the model accuracy was validated via statistical analysis. The 1D-UNet model was further validated by using the side-scan data of other survey lines in the same region.
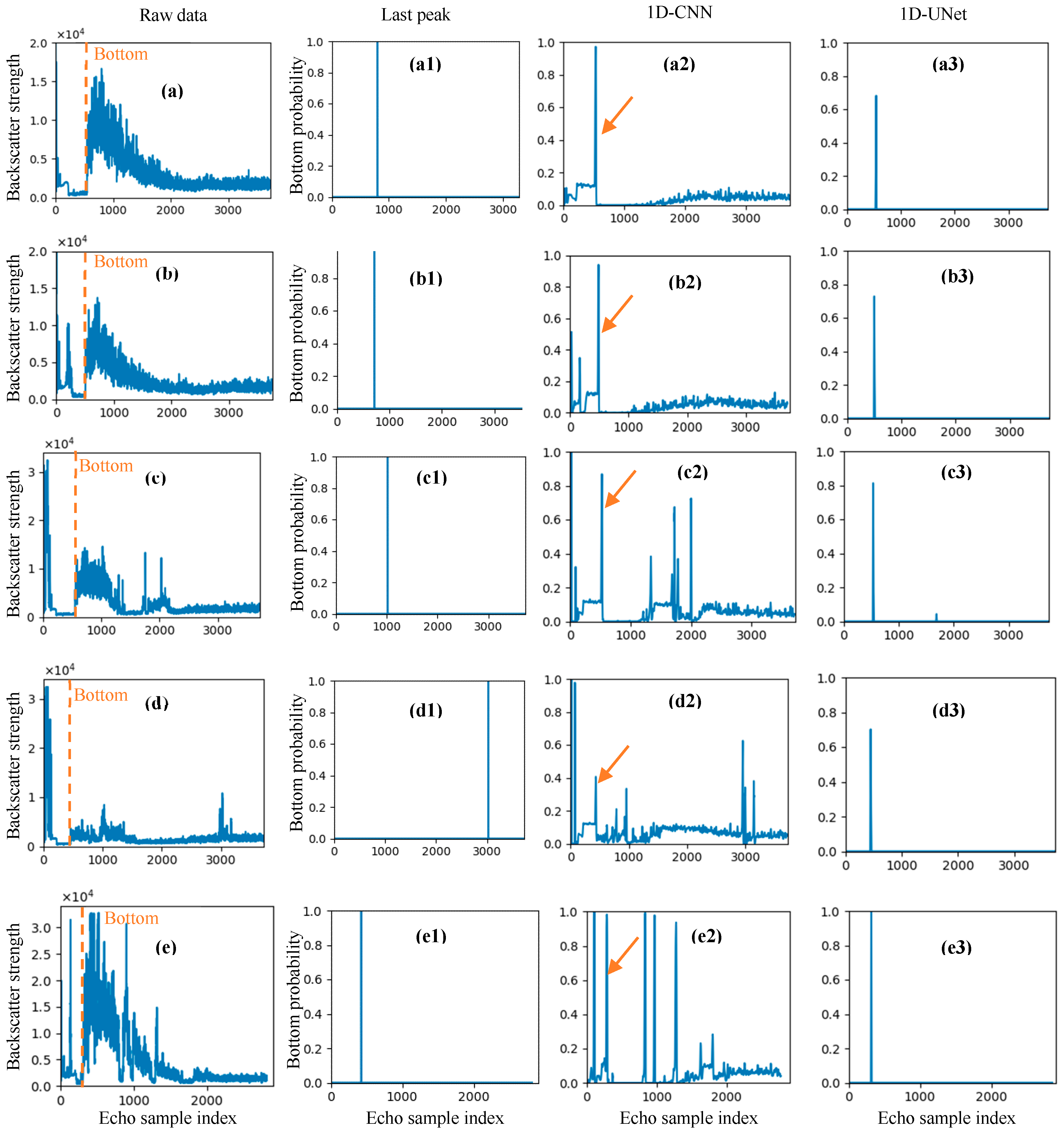
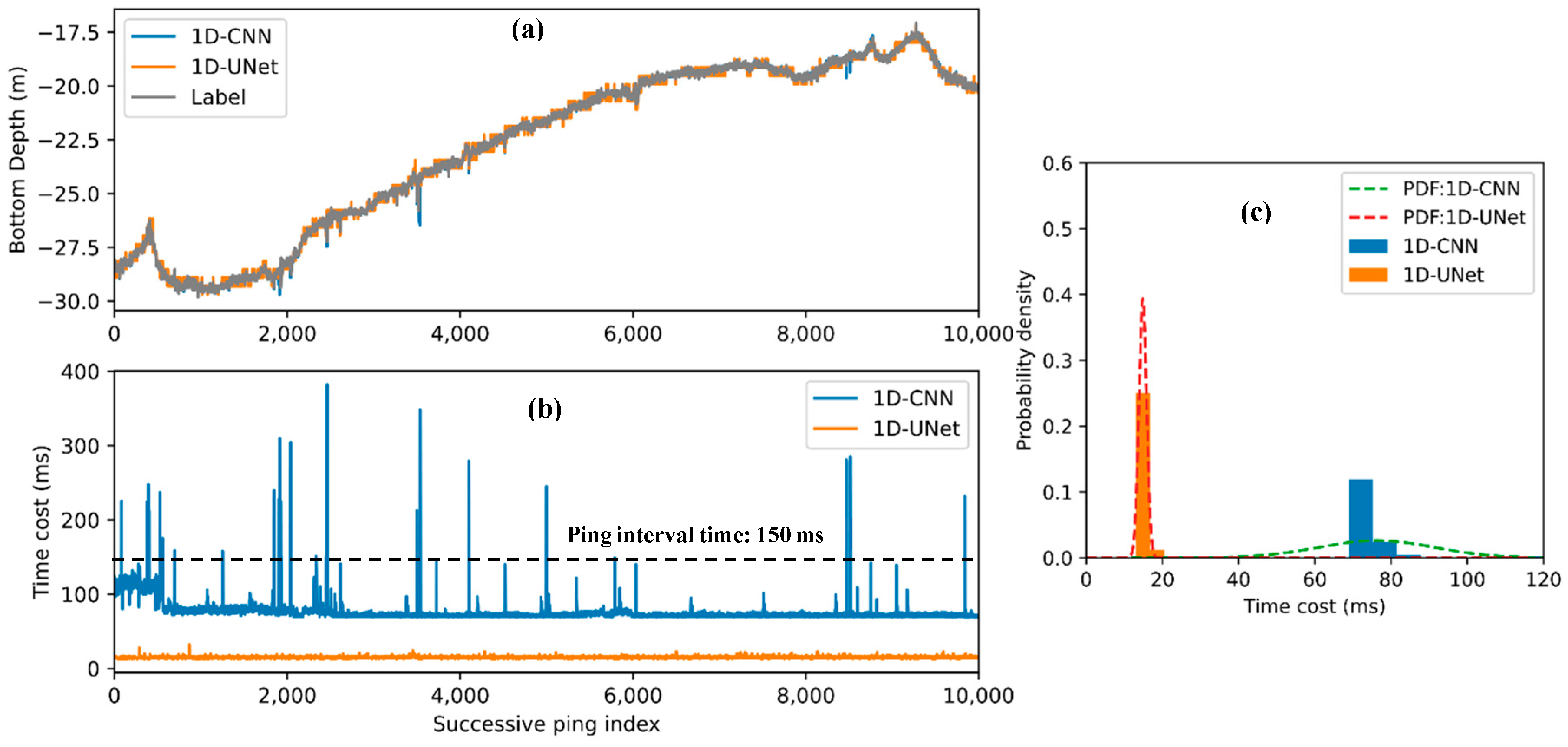
- Model comparison. The trained 1D-UNet model was compared with other methods: The 1D-UNet model was compared with the last peak and the 1D-CNN method to process the side-scan data with different interference factors. The real-time performance of the 1D-UNet model was compared with 1D-CNN via statistical analysis.
- Bottom detection in a different region. To prove the generality of the 1D-UNet model, the trained 1D-UNet model using the side-scan data in Meizhou Bay was applied to process those data in the Bayuquan, where the data were measured with a different side-scan sonar model.
3.1. Training and Learning from the Side-Scan Data in Meizhou Bay
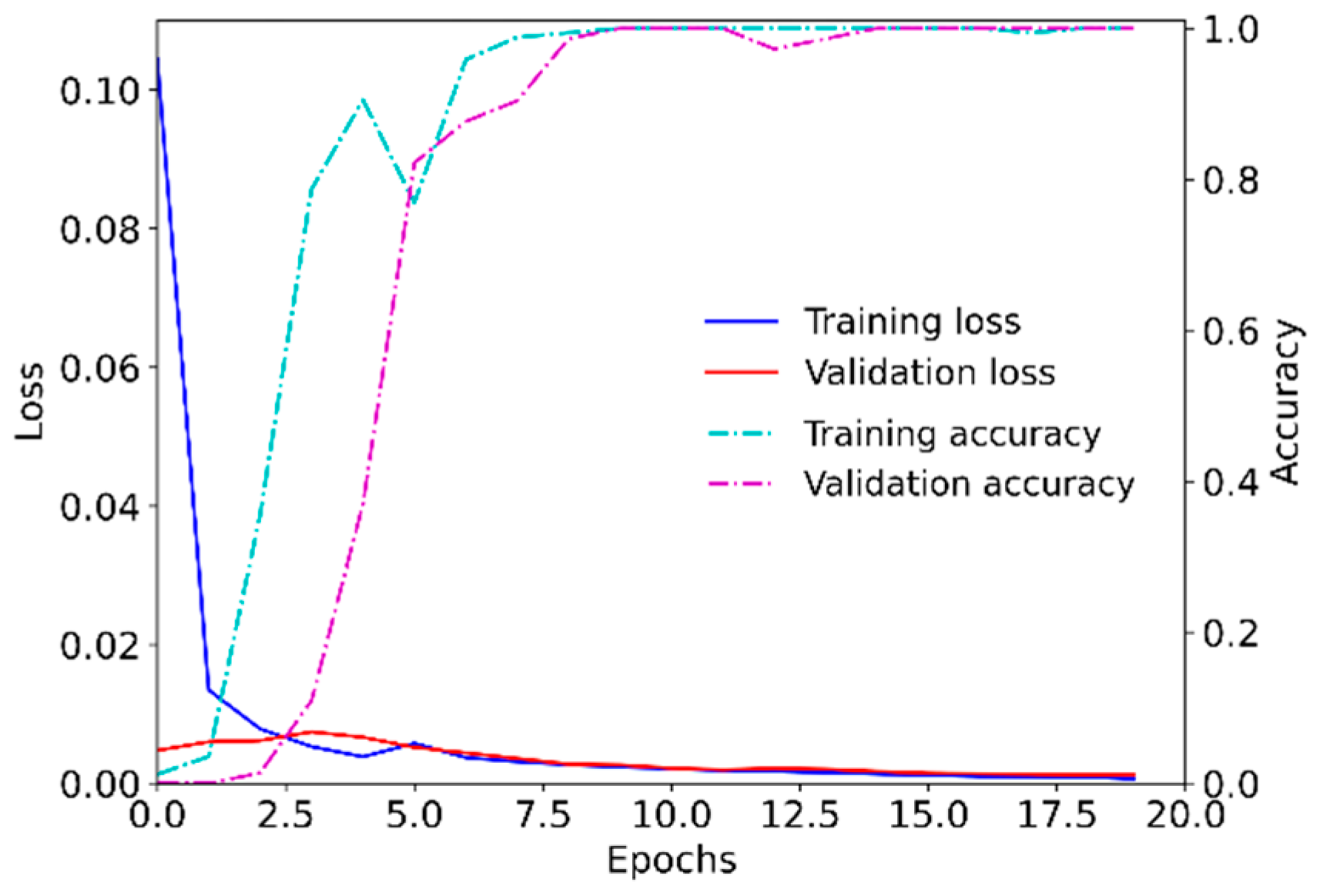
3.1.1. Training and Validation of the 1D-UNet Model
3.1.2. Validation of Other Survey Lines
3.2. Model Validation and Comparison with Other Methods
3.2.1. Comparison with Other Methods
3.2.2. Real-time Performance and Comparison
3.3. Bottom Detection of Side-Scan Data in Other Water Regions
4. Discussion
4.1. Advantanges of Processing Side-Scan Data in 1D Sequences
- More samples and better accuracy. The accuracy and generality of deep learning models will improve with the increase in the number of samples. Many samples will result in higher accuracy and better generality of 1D-UNet. Considering the difficulties in marine surveys, the amount of available side-scan data is quite limited; thus, the number of 2D side-scan images will also be limited. From the perspective of 1D backscatter strength sequences, the numbers would be enormous, which would ensure the accuracy and generality of 1D-UNet.
- Better application with lower GPU memory requirement. The 1D models need less time in training and prediction operations. The 1D convolution, pooling, and other operations are faster and require lower hardware requirements than 2D operations. With regard to integrated systems as side-scan sonars, the lower hardware requirement in the actual measurement means the lower cost and wider applications.
- Faster speed and real-time performance. In practical side-scan sonar operation, ping data are recorded in fixed time intervals, and the real-time recorded data are the 1D backscatter strength sequences. The real-time method should be able to directly process a 1D sequence in a limited time less than the ping interval time. Therefore, the bottom detection and tracking method using 1D-UNet in this work can process side-scan data in real-time.
4.2. Other Exception Situaions
- Very low signal to noise ratio. The 1D-UNet can detect the sea bottom position from the backscatter strength sequences in various ranges. Moreover, 1D-UNet can accurately find the bottom location as long as the backscatter strength sequences can reflect the special strength variation feature at the bottom position. However, when the signal-to-noise ratio is very low, the backscatter strength variation feature cannot be reflected in the strength sequence due to the influence of noise and other interference factors (Figure 15). In this situation, even manual labeling could also be difficult, and 1D-UNet can hardly detect the bottom location.
- Very large suspended object. When a large suspended object is in the water column, or even almost fills the whole water column, the echo signals in the water column region could be very high. The backscatter strengths from the water column are in the same signal level as echoes from the seabed because of the high reflectivity of the suspended object and time-varying gains (Figure 16). Therefore, distinguishing the boundary between the water column and the seabed areas is difficult, and the special backscatter strength variation feature at the bottom position cannot be reflected. In this situation, neither a human being nor the 1D-UNet can easily identify the bottom location.
4.3. Reproducibility and Application
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Collier, J.S.; Humber, S.R. Time-lapse side-scan sonar imaging of bleached coral reefs: A case study from the Seychelles. Remote Sens. Environ. 2007, 108, 339–356. [Google Scholar] [CrossRef]
- Le Bas, T.P.; Huvenne, V.A.I. Acquisition and processing of backscatter data for habitat mapping—Comparison of multibeam and sidescan systems. Appl. Acoust. 2009, 70, 1248–1257. [Google Scholar] [CrossRef]
- Lucieer, V.L. Object-oriented classification of sidescan sonar data for mapping benthic marine habitats. Int. J. Remote Sens. 2008, 29, 905–921. [Google Scholar] [CrossRef]
- Yulin, T.; Jin, S.; Bian, G.; Zhang, Y. Shipwreck Target Recognition in Side-Scan Sonar Images by Improved YOLOv3 Model Based on Transfer Learning. IEEE Access 2020, 8, 173450–173460. [Google Scholar] [CrossRef]
- Li, J.; Jiang, P.; Zhu, H. A Local Region-Based Level Set Method With Markov Random Field for Side-Scan Sonar Image Multi-Level Segmentation. IEEE Sens. J. 2021, 21, 510–519. [Google Scholar] [CrossRef]
- Fakiris, E.; Zoura, D.; Ramfos, A.; Spinos, E.; Georgiou, N.; Ferentinos, G.; Papatheodorou, G. Object-based classification of sub-bottom profiling data for benthic habitat mapping. Comparison with sidescan and RoxAnn in a Greek shallow-water habitat. Estuar. Coast. Shelf Sci. 2018, 208, 219–234. [Google Scholar] [CrossRef]
- Trzcinska, K.; Janowski, L.; Nowak, J.; Rucinska-Zjadacz, M.; Kruss, A.; von Deimling, J.S.; Pocwiardowski, P.; Tegowski, J. Spectral features of dual-frequency multibeam echosounder data for benthic habitat mapping. Mar. Geol. 2020, 427, 106239. [Google Scholar] [CrossRef]
- Galvez, D.S.; Papenmeier, S.; Hass, H.C.; Bartholomae, A.; Fofonova, V.; Wiltshire, K.H. Detecting shifts of submarine sediment boundaries using side-scan mosaics and GIS analyses. Mar. Geol. 2020, 430, 106343. [Google Scholar] [CrossRef]
- Isachenko, A.; Gubanova, Y.; Tzetlin, A.; Mokievsky, V. High-resolution habitat mapping on mud fields: New approach to quantitative mapping of Ocean quahog. Mar. Environ. Res. 2014, 102, 36–42. [Google Scholar] [CrossRef]
- Cui, X.; Liu, H.; Fan, M.; Ai, B.; Ma, D.; Yang, F. Seafloor habitat mapping using multibeam bathymetric and backscatter intensity multi-features SVM classification framework. Appl. Acoust. 2021, 174, 107728. [Google Scholar] [CrossRef]
- Acosta, G.G.; Villar, S.A. Accumulated CA–CFAR Process in 2-D for Online Object Detection From Sidescan Sonar Data. IEEE J. Ocean. Eng. 2015, 40, 558–569. [Google Scholar] [CrossRef]
- Reed, S.; Petillot, Y.; Bell, J. An automatic approach to the detection and extraction of mine features in sidescan sonar. IEEE J. Ocean. Eng. 2003, 28, 90–105. [Google Scholar] [CrossRef]
- Blondel, P. Automatic mine detection by textural analysis of COTS sidescan sonar imagery. Int. J. Remote Sens. 2000, 21, 3115–3128. [Google Scholar] [CrossRef]
- Huo, G.; Yang, S.X.; Li, Q.; Zhou, Y. A Robust and Fast Method for Sidescan Sonar Image Segmentation Using Nonlocal Despeckling and Active Contour Model. IEEE Trans. Cybern. 2017, 47, 855–872. [Google Scholar] [CrossRef] [PubMed]
- Zhu, B.; Wang, X.; Chu, Z.; Yang, Y.; Shi, J. Active Learning for Recognition of Shipwreck Target in Side-Scan Sonar Image. Remote Sens. 2019, 11, 243. [Google Scholar] [CrossRef]
- Song, Y.; He, B.; Zhao, Y.; Li, G.; Sha, Q.; Shen, Y.; Yan, T.; Nian, R.; Lendasse, A. Segmentation of Sidescan Sonar Imagery Using Markov Random Fields and Extreme Learning Machine. IEEE J. Ocean. Eng. 2019, 44, 502–513. [Google Scholar] [CrossRef]
- Buscombe, D.; Grams, P.E.; Smith, S.M.C. Automated Riverbed Sediment Classification Using Low-Cost Sidescan Sonar. J. Hydraul. Eng. 2016, 142, 06015019. [Google Scholar] [CrossRef]
- Blomberg, A.E.A.; Sæbø, T.O.; Hansen, R.E.; Pedersen, R.B.; Austeng, A. Automatic Detection of Marine Gas Seeps Using an Interferometric Sidescan Sonar. IEEE J. Ocean. Eng. 2017, 42, 590–602. [Google Scholar] [CrossRef]
- Degraer, S.; Moerkerke, G.; Rabaut, M.; Van Hoey, G.; Du Four, I.; Vincx, M.; Henriet, J.-P.; Van Lancker, V. Very-high resolution side-scan sonar mapping of biogenic reefs of the tube-worm Lanice conchilega. Remote Sens. Environ. 2008, 112, 3323–3328. [Google Scholar] [CrossRef]
- Capus, C.G.; Banks, A.C.; Coiras, E.; Ruiz, I.T.; Smith, C.J.; Petillot, Y.R. Data correction for visualisation and classification of sidescan SONAR imagery. IET Radar Sonar Navig. 2008, 2, 155–169. [Google Scholar] [CrossRef]
- Reed, S.; Ruiz, I.T.; Capus, C.; Petillot, Y. The fusion of large scale classified side-scan sonar image mosaics. IEEE Trans. Image Process. 2006, 15, 2049–2060. [Google Scholar] [CrossRef] [PubMed]
- Capus, C.; Ruiz, I.T.; Petillot, Y. Compensation for changing beam pattern and residual tvg effects with sonar altitude variation for sidescan mosaicing and classification. In Proceedings of the 7th European Conference Underwater Acoustics, Delft, The Netherlands, 5–8 July 2004. [Google Scholar]
- Zhao, J.; Yan, J.; Zhang, H.; Zhang, Y.; Wang, A. A new method for weakening the combined effect of residual errors on multibeam bathymetric data. Mar. Geophys. Res. 2014, 35, 379–394. [Google Scholar] [CrossRef]
- Al-Rawi, M.; Elmgren, F.; Frasheri, M.; Cürüklü, B.; Yuan, X.; Martínez, J.; Bastos, J.; Rodriguez, J.; Pinto, M. Algorithms for the detection of first bottom returns and objects in the water column in sidescan sonar images. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–5. [Google Scholar]
- Ruiz, I.T.; Raucourt, S.D.; Petillot, Y.; Lane, D.M. Concurrent mapping and localization using sidescan sonar. IEEE J. Ocean. Eng. 2004, 29, 442–456. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, X.; Zhang, H.; Wang, A. A Comprehensive Bottom-Tracking Method for Sidescan Sonar Image Influenced by Complicated Measuring Environment. IEEE J. Ocean. Eng. 2017, 42, 619–631. [Google Scholar] [CrossRef]
- Khan, M.A.; Kim, J. Toward Developing Efficient Conv-AE-Based Intrusion Detection System Using Heterogeneous Dataset. Electronics 2020, 9, 1771. [Google Scholar] [CrossRef]
- Cui, X.; Yang, F.; Wang, X.; Ai, B.; Luo, Y.; Ma, D. Deep learning model for seabed sediment classification based on fuzzy ranking feature optimization. Mar. Geol. 2021, 432, 106390. [Google Scholar] [CrossRef]
- Dirscherl, M.; Dietz, A.J.; Kneisel, C.; Kuenzer, C. A Novel Method for Automated Supraglacial Lake Mapping in Antarctica Using Sentinel-1 SAR Imagery and Deep Learning. Remote Sens. 2021, 13, 197. [Google Scholar] [CrossRef]
- Wang, H.; Yang, J.; Zhu, J.; Ren, L.; Liu, Y.; Li, W.; Chen, C. Estimation of Significant Wave Heights from ASCAT Scatterometer Data via Deep Learning Network. Remote Sens. 2021, 13, 195. [Google Scholar] [CrossRef]
- Wu, P.; Yin, Z.; Yang, H.; Wu, Y.; Ma, X. Reconstructing Geostationary Satellite Land Surface Temperature Imagery Based on a Multiscale Feature Connected Convolutional Neural Network. Remote Sens. 2019, 11, 300. [Google Scholar] [CrossRef]
- Khan, M.A.; Kim, Y. Cardiac Arrhythmia Disease Classification Using LSTM Deep Learning Approach. Comput. Mater. Contin. 2021, 67, 427–443. [Google Scholar] [CrossRef]
- Yuan, Q.; Shen, H.; Li, T.; Li, Z.; Li, S.; Jiang, Y.; Xu, H.; Tan, W.; Yang, Q.; Wang, J.; et al. Deep learning in environmental remote sensing: Achievements and challenges. Remote Sens. Environ. 2020, 241, 111716. [Google Scholar] [CrossRef]
- Xie, Y. Machine Learning for Inferring Depth from Side-Scan Sonar Images. Master’s Thesis, KTH Royal Institude of Technology, Stockholm, Sweden, September 2019. [Google Scholar]
- Sun, J.; Xu, G.; Ren, W.; Yan, Z. Radar emitter classification based on unidimensional convolutional neural network. IET Radar Sonar Navig. 2018, 12, 862–867. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D. Real-Time Vibration-Based Structural Damage Detection Using One-Dimensional Convolutional Neural Networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Milletari, F.; Navab, N.; Ahmadi, S.A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016. [Google Scholar]
- Isensee, F.; Petersen, J.; Klein, A.; Zimmerer, D.; Jaeger, P.F.; Kohl, S.; Wasserthal, J.; Koehler, G.; Norajitra, T.; Wirkert, S.; et al. Abstract: nnU-Net: Self-adapting Framework for U-Net-Based Medical Image Segmentation. In Proceedings of the Bildver-Arbeitung für die Medizin 2019, Wiesbaden, Germany, 17–19 March 2019. [Google Scholar]
- Yan, J.; Meng, J.; Zhao, J. Real-Time Bottom Tracking Using Side Scan Sonar Data Through One-Dimensional Convolutional Neural Networks. Remote Sens. 2020, 12, 37. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015, Munich, Germany, 5–9 October 2015. [Google Scholar]
- Wang, Q.; Wu, M.; Yu, F.; Feng, C.; Li, K.; Zhu, Y.; Rigall, E.; He, B. RT-Seg: A Real-Time Semantic Segmentation Network for Side-Scan Sonar Images. Sensors 2019, 19, 1985. [Google Scholar] [CrossRef] [PubMed]
- Dmitrieva, M.; Lefebvre, J.; Peñas, K.D.; Zenner, H.L.; Richens, J.; Johnston, D.S.; Rittscher, J. Short Trajectory Segmentation with 1D UNET Framework: Application to Secretory Vesicle Dynamics. In Proceedings of the 2020 IEEE 17th International Symposium on Biomedical Imaging (ISBI), Iowa City, IA, USA, 3–7 April 2020; pp. 891–894. [Google Scholar]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. 2017, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Kamnitsas, K.; Glocker, B. Overfitting of Neural Nets Under Class Imbalance: Analysis and Improvements for Segmentation. In Proceedings of the Medical Image Computing and Computer Assisted Intervention—MICCAI 2019, Shenzhen, China, 13–17 October 2019; pp. 402–410. [Google Scholar]
- Hughes Clarke, J.E.; Lamplugh, M.; Czotter, K. Multibeam water column imaging: Improved wreck least-depth determination. In Proceedings of the Canadian Hydrographic Conference 2006, Halifax, NS, Canada, 6–9 June 2006. [Google Scholar]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Meng, J.; Zhao, J. Bottom Detection from Backscatter Data of Conventional Side Scan Sonars through 1D-UNet. Remote Sens. 2021, 13, 1024. https://doi.org/10.3390/rs13051024
Yan J, Meng J, Zhao J. Bottom Detection from Backscatter Data of Conventional Side Scan Sonars through 1D-UNet. Remote Sensing. 2021; 13(5):1024. https://doi.org/10.3390/rs13051024
Chicago/Turabian StyleYan, Jun, Junxia Meng, and Jianhu Zhao. 2021. "Bottom Detection from Backscatter Data of Conventional Side Scan Sonars through 1D-UNet" Remote Sensing 13, no. 5: 1024. https://doi.org/10.3390/rs13051024
APA StyleYan, J., Meng, J., & Zhao, J. (2021). Bottom Detection from Backscatter Data of Conventional Side Scan Sonars through 1D-UNet. Remote Sensing, 13(5), 1024. https://doi.org/10.3390/rs13051024