An Enhanced Smartphone Indoor Positioning Scheme with Outlier Removal Using Machine Learning



 , ,
, ,
Abstract
:
1. Introduction
- Improving the WiFi individually: Five nearest neighbor (NN)-based algorithms are compared based on the same radio map named Database2 in [28], which contains 100 RPs and the distance between adjacent RPs is about 2.4 m. A physical distance of the RSS algorithm is proposed in [29] to estimate the positioning coordinate and achieves a root mean square error (RMSE) of 4.49 m and a maximum error (MaxE) of about 10 m. An affinity propagation clustering (APC) algorithm is proposed in [30] and achieves an RMSE of 4.90 m and a MaxE of about 10 m. An optimal weight KNN (OWKNN) algorithm which employs the Euclidean distance is proposed in [31] and achieves an RMSE of 5.54 m and a MaxE of about 10 m. ZiLoc is proposed in [32] which employs the Manhattan distance and achieves an RMSE of 5.88 m and a MaxE of about 10 m. An approximate-position-distance-based WKNN (APD-WKNN) algorithm is proposed in [28] and achieves an RMSE of 3.52 m and a MaxE of about 10 m. In summary, although many excellent algorithms have been proposed, due to the inherent RSS variation, the outliers of WiFi inevitably exist in WiFi technology, which has become a challenge for the hybrid fusion scheme.
- Enhance the hybrid fusion scheme: Li [50] proposed a robustly constrained Kalman filter (KF) scheme. The integrated WiFi of the scheme achieves a MaxE of over than 13 m. To lessen the effect of outliers, a chi-square test which based on Gaussian assumption is employed. However, the Gaussian assumption is not easy to be guaranteed in practical applications due to the RSS variation caused by the signal refraction, reflection, scattering, and multi-path fading. Thus, the unremoved outliers will degrade the performance of the scheme. Hu [51] proposed a Segment-based PDR/WiFi scheme. In the scheme, although the AP whose RSS less than -80 dBm is deleted in the online phase, the integrated WiFi achieves a mean error (ME) of 5.3 m and a MaxE of over 20 m, which demonstrates that there still exist many outliers. Moreover, the scheme defines a fixed size window and utilizes the averaged coordinate of the WiFi in the window to realize the fusion. However, the WiFi positioning coordinates will concentrate on a small area sometimes [52]. Therefore, the averaged coordinate may be an outlier and further will degrade the performance of the scheme. Chen [53] proposed an INS/WiFi scheme. The scheme employs a pre-processing technique to enhance the WiFi signal quality and a Multi-dimensional Dynamic Time Warping (MDTW) to improve the WiFi. However, the improved WiFi achieves a ME of 6.33 m and a MaxE of 11.78 m on handheld motion in the first experiment, which demonstrates that there still exist many outliers. Although the scheme automatically adjusts the weighting coefficients of WiFi, the unremoved outliers will still be integrated into the scheme and inevitably degrade the performance of the scheme. In summary, although many excellent hybrid fusion schemes have been proposed, due to the inherent RSS variation, the outliers of WiFi still exist and has become a challenge for the hybrid fusion scheme.
- We reasonably assume that the motion state of the pedestrian in smartphone indoor positioning comprises static and walking, then based on the extracted positioning characteristics of WiFi when the pedestrian is static, we proposed the first outlier detection and removal strategy using Machine Learning (ML) named WiFi-AGNES (Agglomerative Nesting).
- Based on the extracted positioning characteristics of PDR and WiFi and the complementary characteristics when the pedestrian is walking, we proposed the second outlier detection and removal strategy named WiFi-Chain.
- We proposed a hybrid fusion scheme which integrates the two proposed strategies, fingerprinting-based WiFi, PDR with an inertial-navigation-system-based (INS-based) attitude heading reference system (AHRS) via Extended Kalman Filter (EKF) for the azimuth estimation of PDR and an Unscented Kalman Filter (UKF) for the final fusion.
2. Related Works
3. Outlier Detection and Removal Strategy
3.1. Strategy for Static State
3.1.1. Positioning Characteristics of WiFi
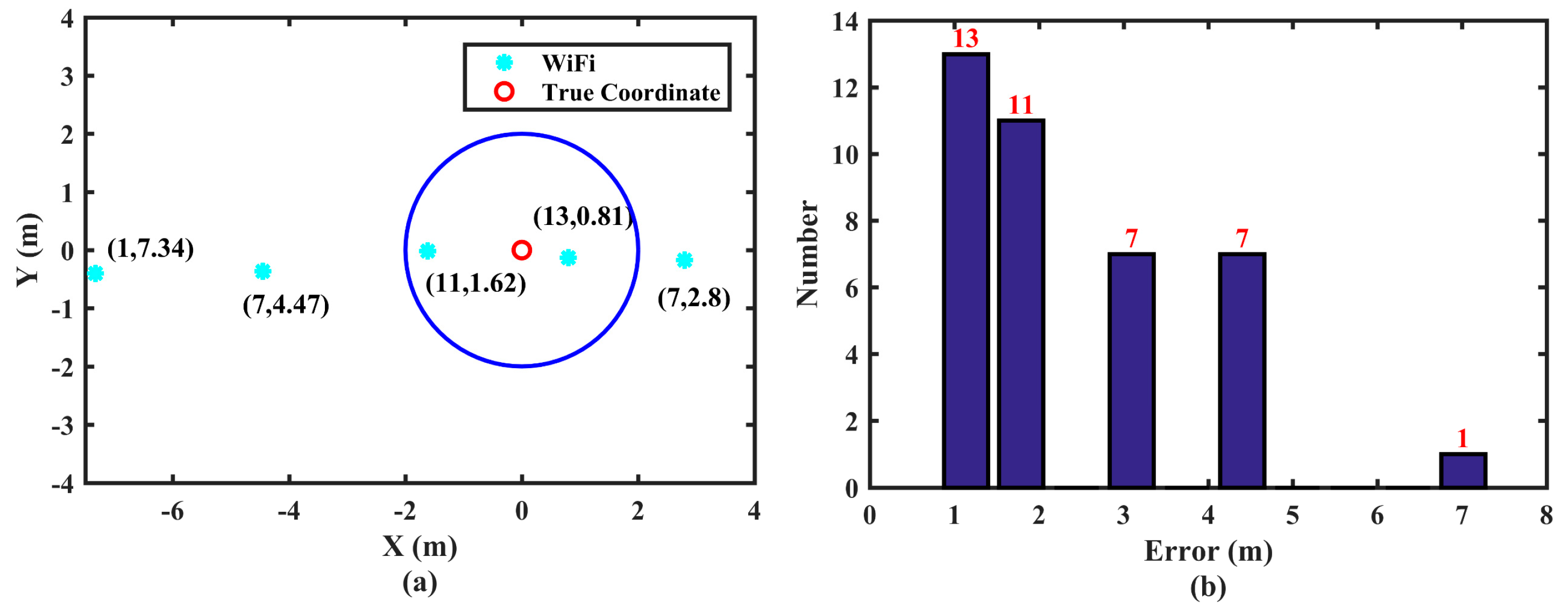
- Any two WiFi are independent with each other, which indicates that there is no cumulative error.
- Among the received WiFi, relatively, some are approximately accurate and therefore close to the true coordinate, while the others are jumping and therefore far from the true coordinate.
- Among the received WiFi, taking the radius of the blue circle as a threshold, in the sense of Euclidean distance, the approximately accurate WiFi coordinates fall in the circle and form a cluster, while the jumping WiFi are scattered and not formed a cluster.
- Among the received WiFi, the quantity of WiFi inside the circle is more than that outside.
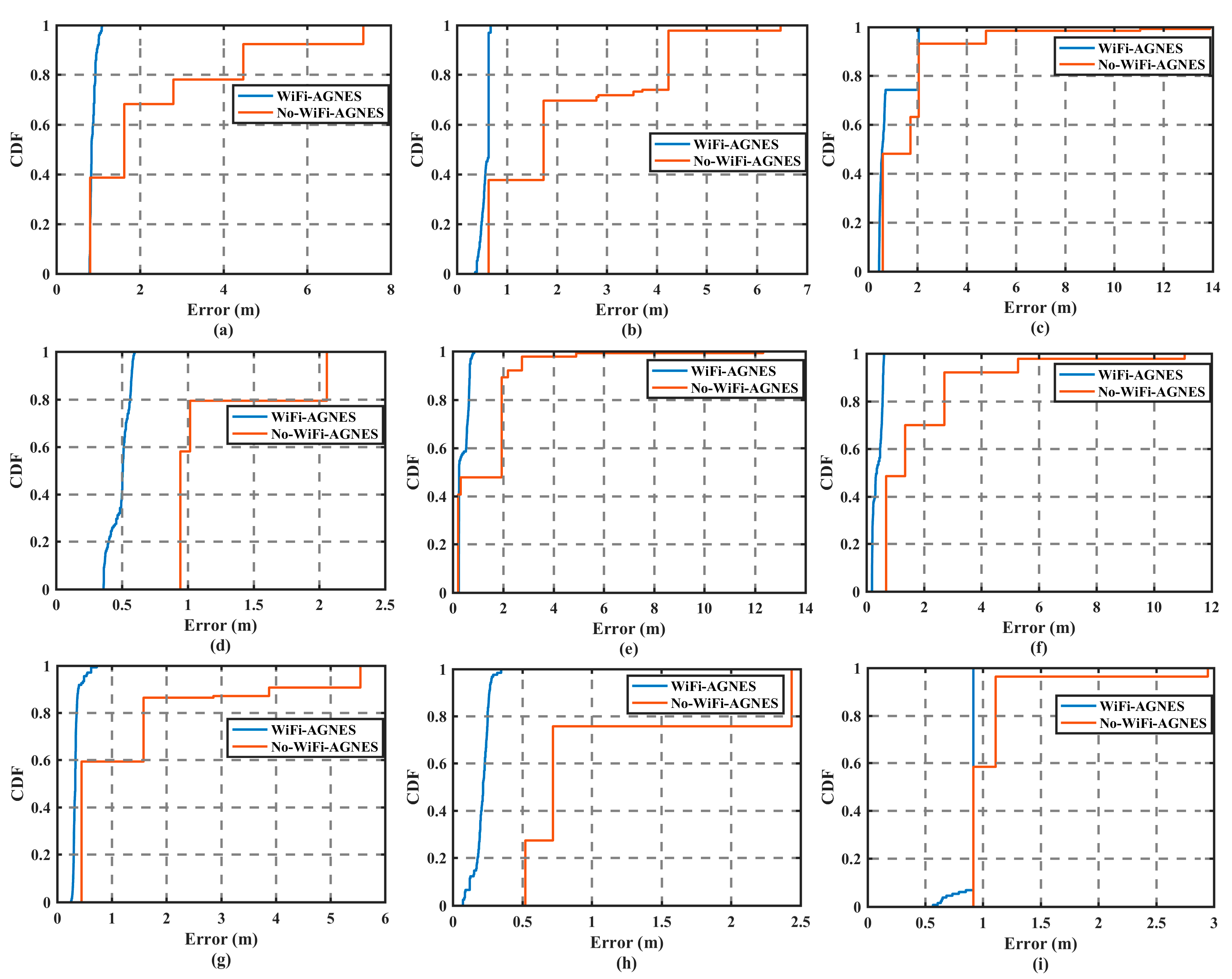
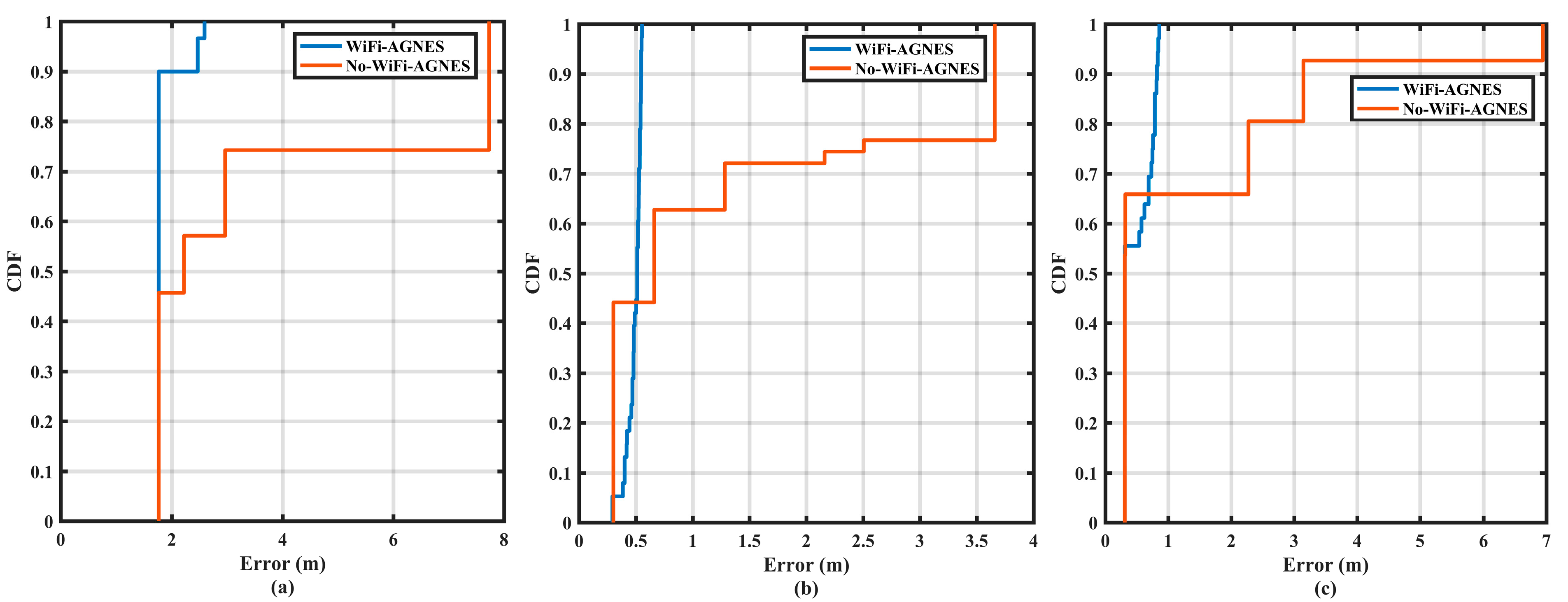
3.1.2. WiFi-AGNES
3.2. Strategy for Walking State
3.2.1. Positioning Characteristics of PDR and WiFi
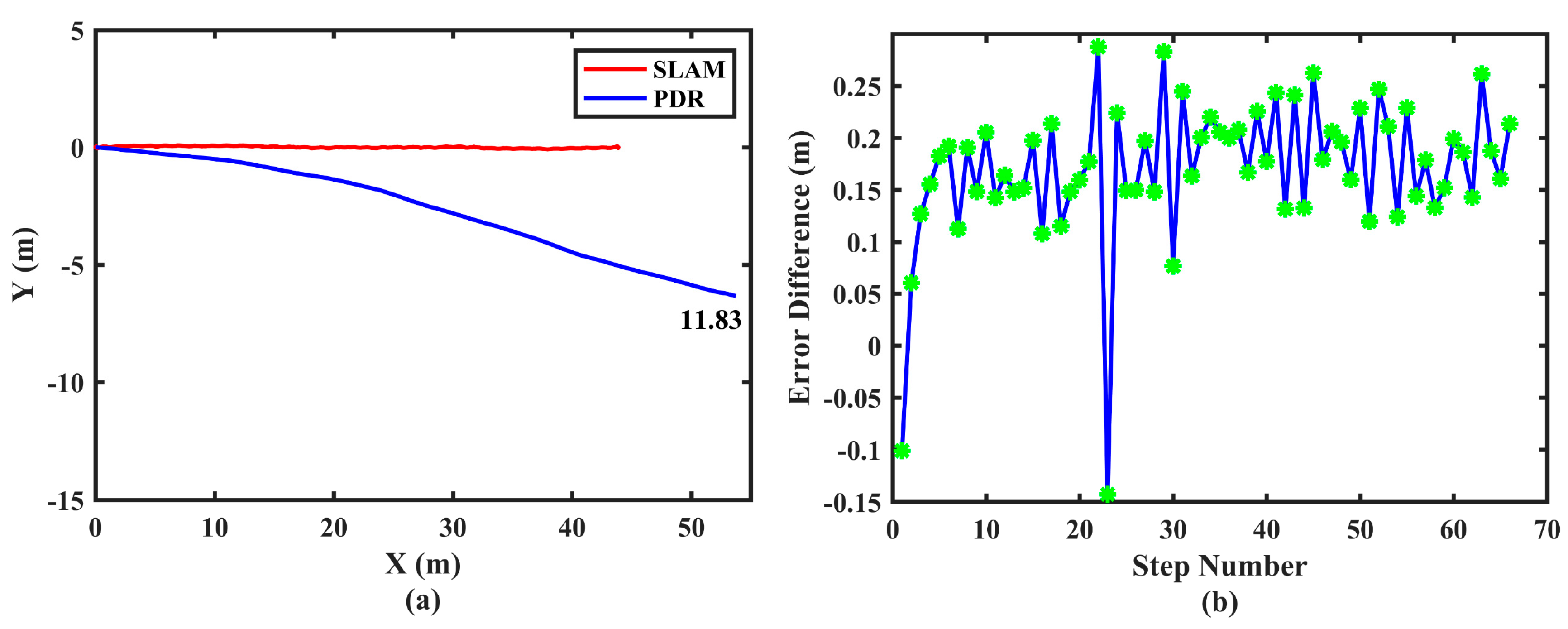
- The maximum error difference of PDR does not exceed 0.3 m, which indicates that the relative accuracy of PDR is high, regardless of the absolute error.
- On the basis that there is no absolute error in the first step, the absolute error of the last step reaches 11.83 m, which indicates that PDR has a cumulative error in the long term.
- Any two WiFi are independent with each other, which indicates that there is no cumulative error.
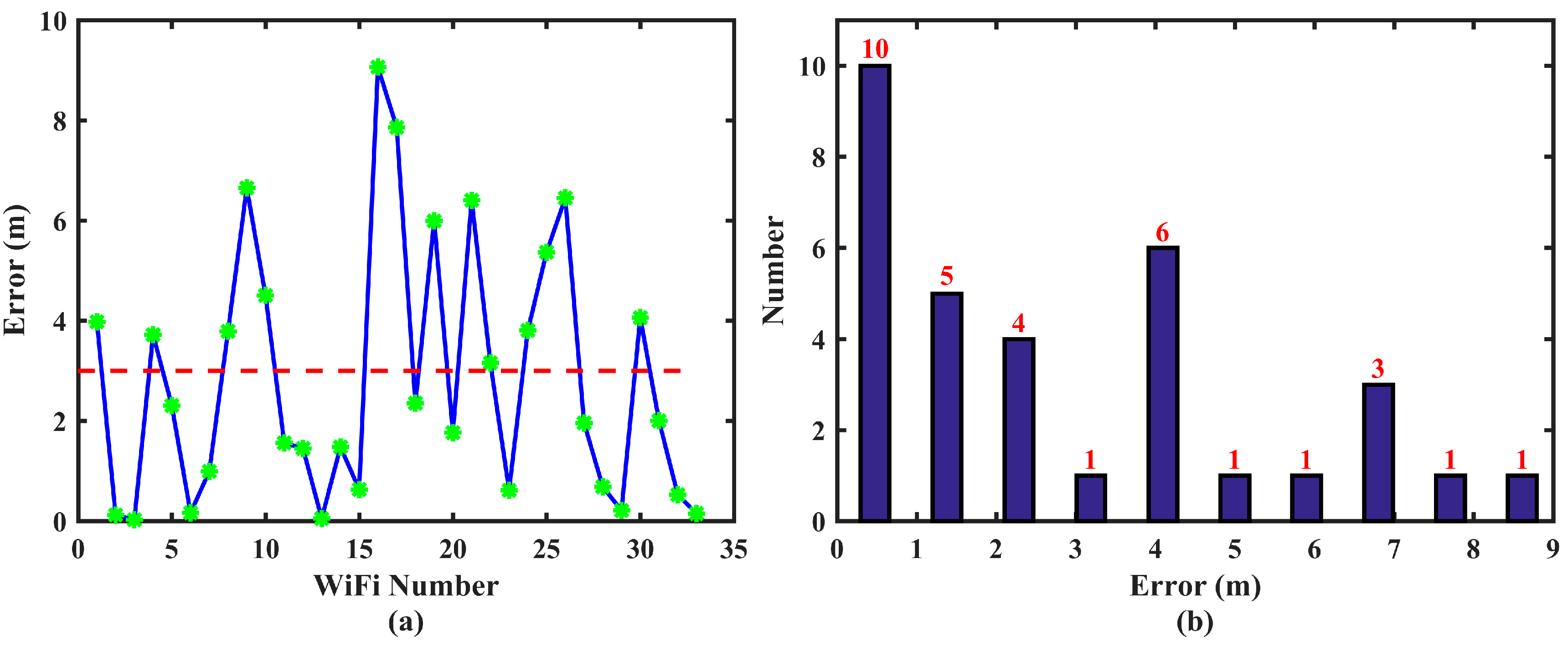
- Among the received WiFi, relatively, some are approximately accurate, while the others are jumping.
- Among the received WiFi, assuming that we take 3 m as the dividing line, the number of approximately accurate WiFi is more than the jumping.
- Due to the inherent RSS variation, there is a randomness in the jumping WiFi.
- Among the received WiFi, the jumping WiFi is received intermittently.
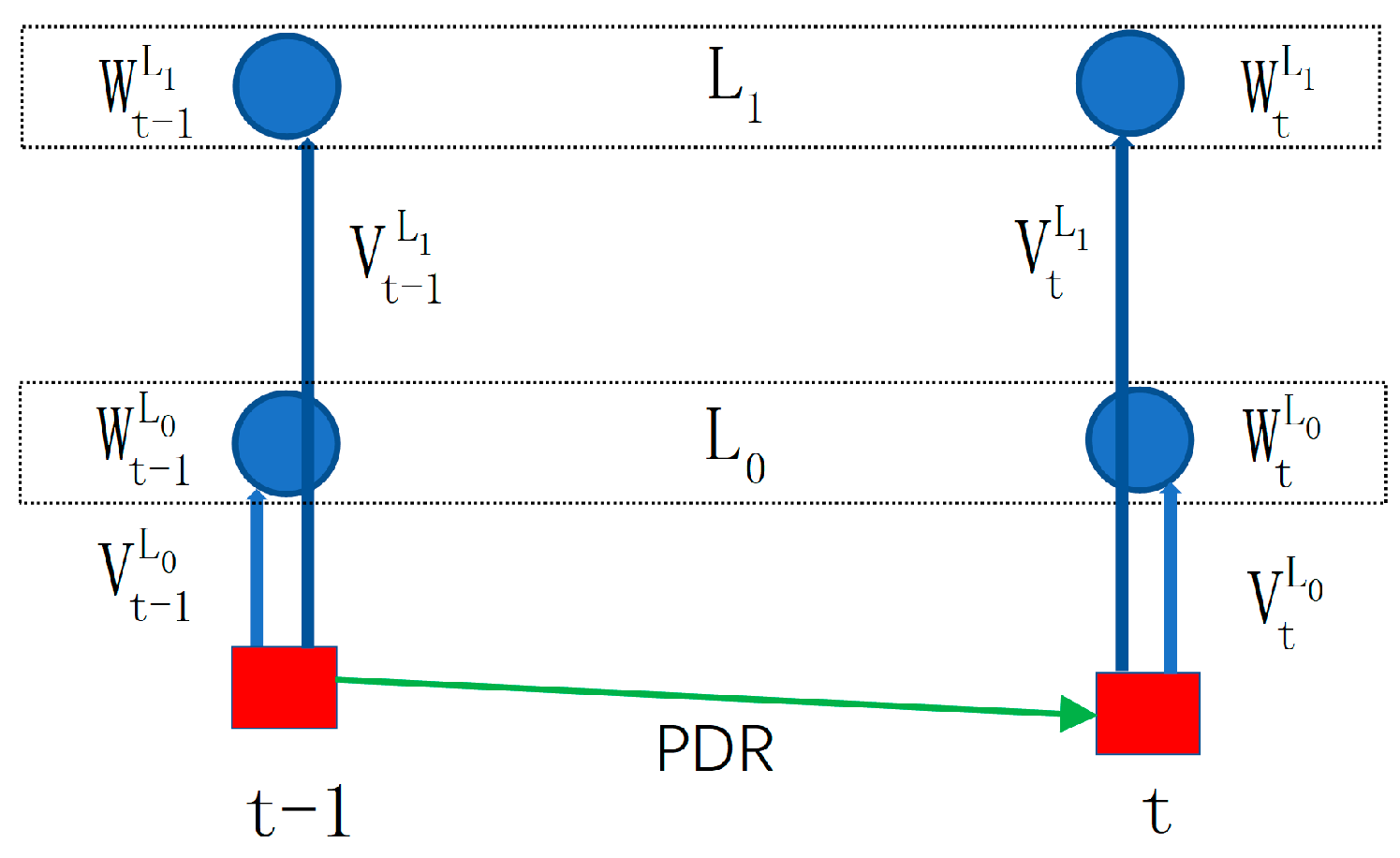
3.2.2. Complementary Characteristics between PDR and WiFi
3.2.3. WiFi-Chain
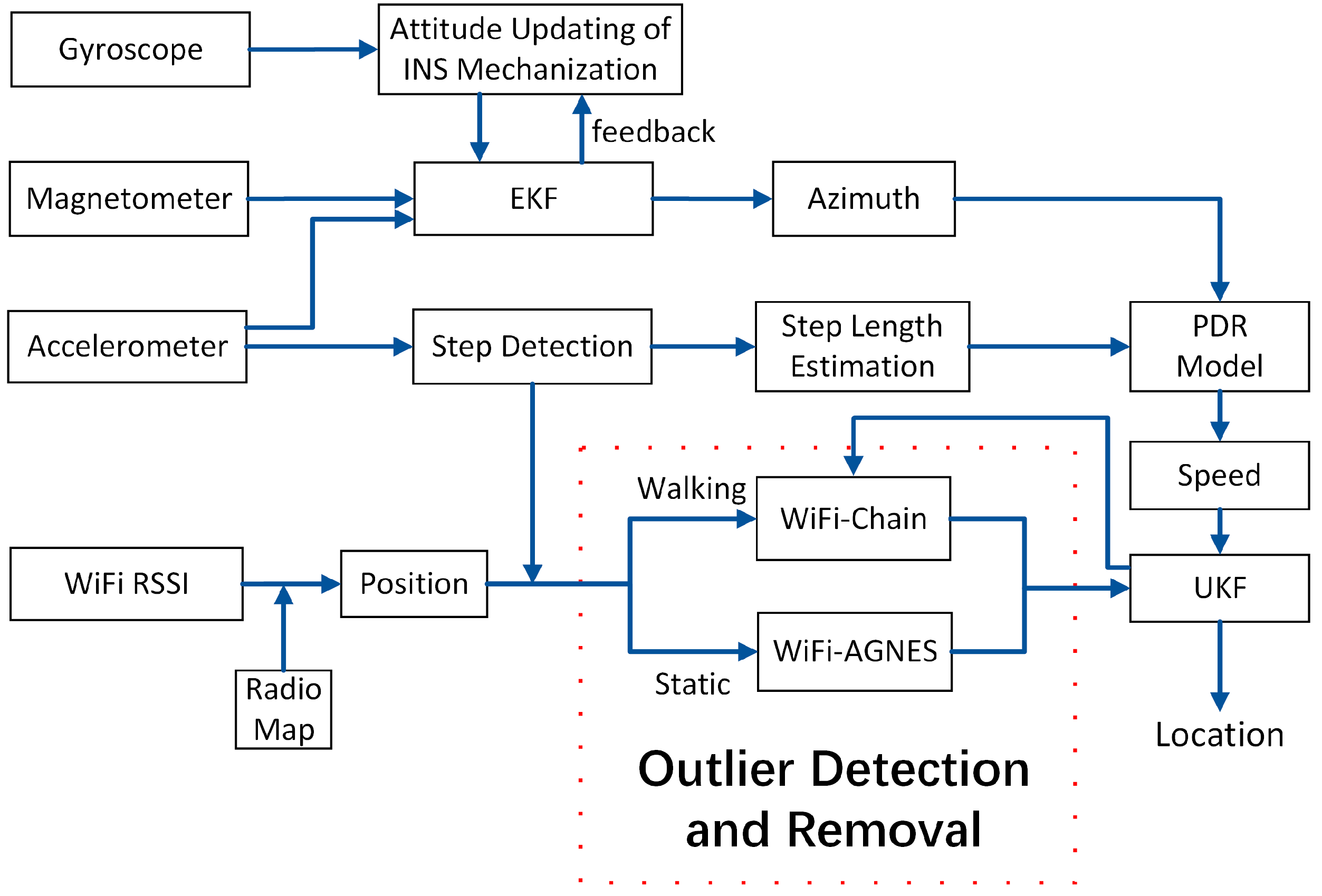
4. Proposed Hybrid Fusion Scheme
4.1. System Overview
4.2. PDR Technology
4.2.1. Azimuth Estimation
4.2.2. Step Detection and Step Length Estimation
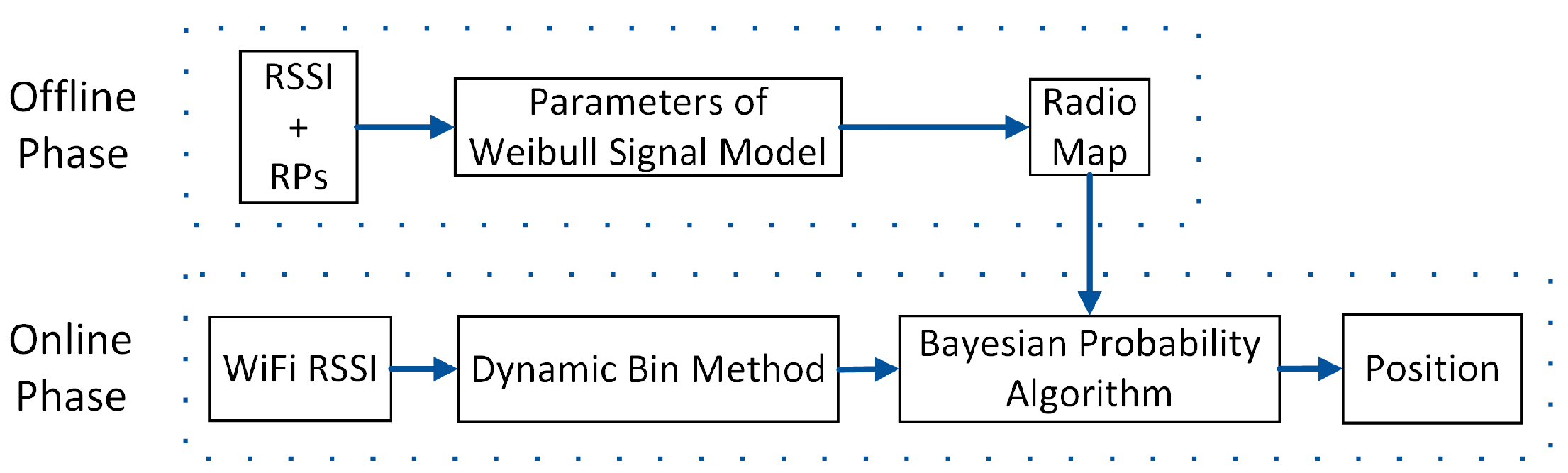
4.3. WiFi Technology
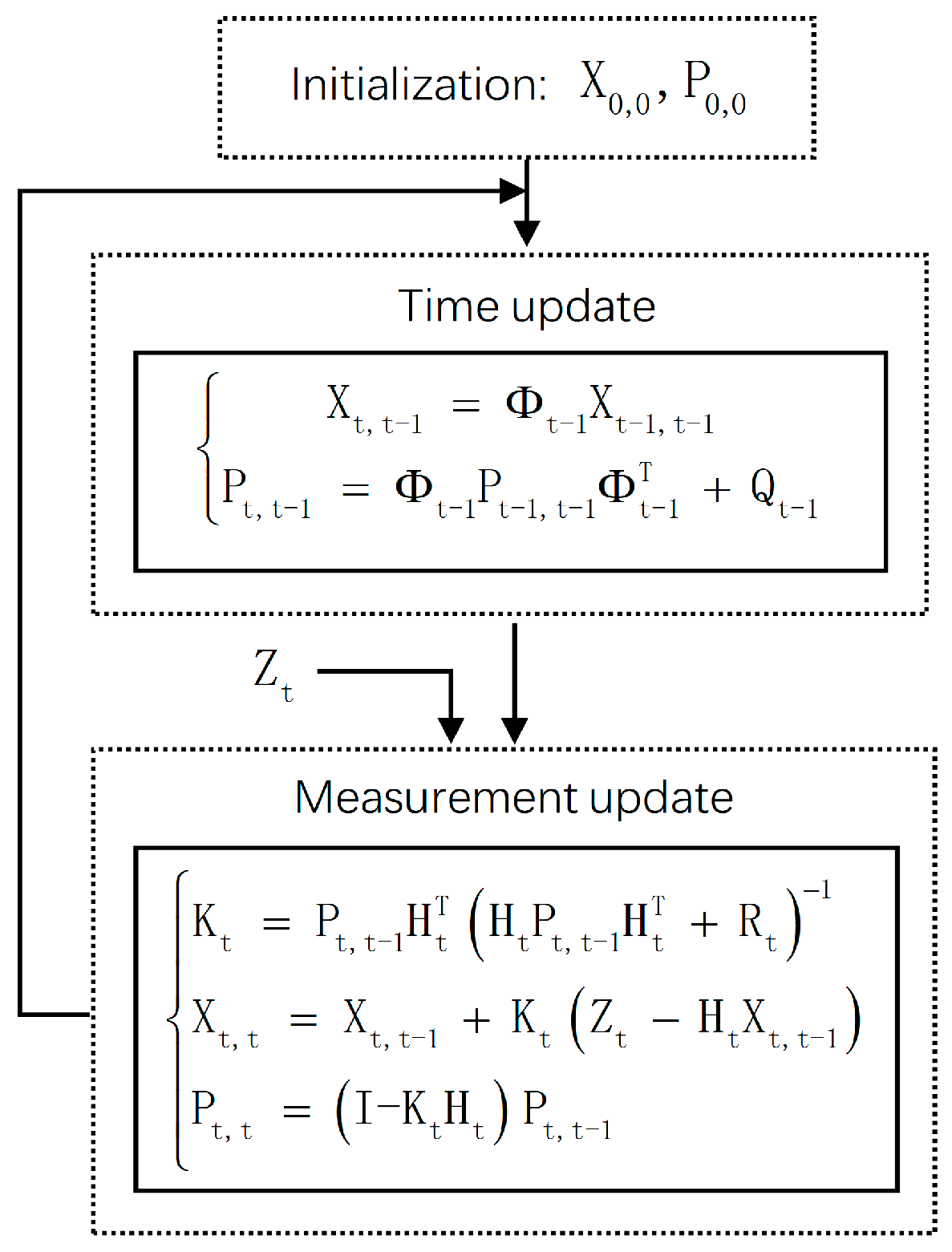
4.4. Hybrid Fusion via UKF
- There exists a non-linear in the proposed hybrid fusion scheme when considering the azimuth as a state variable. In this situation, KF is inapplicable for its linear nature. EKF is also inapplicable for its linearization error and hence will degrade the positioning accuracy [52].
- Compared with PF, UKF is a lighter filter that is more suitable for real-time positioning on the resource-limited smartphone.
5. Experimental Evaluation
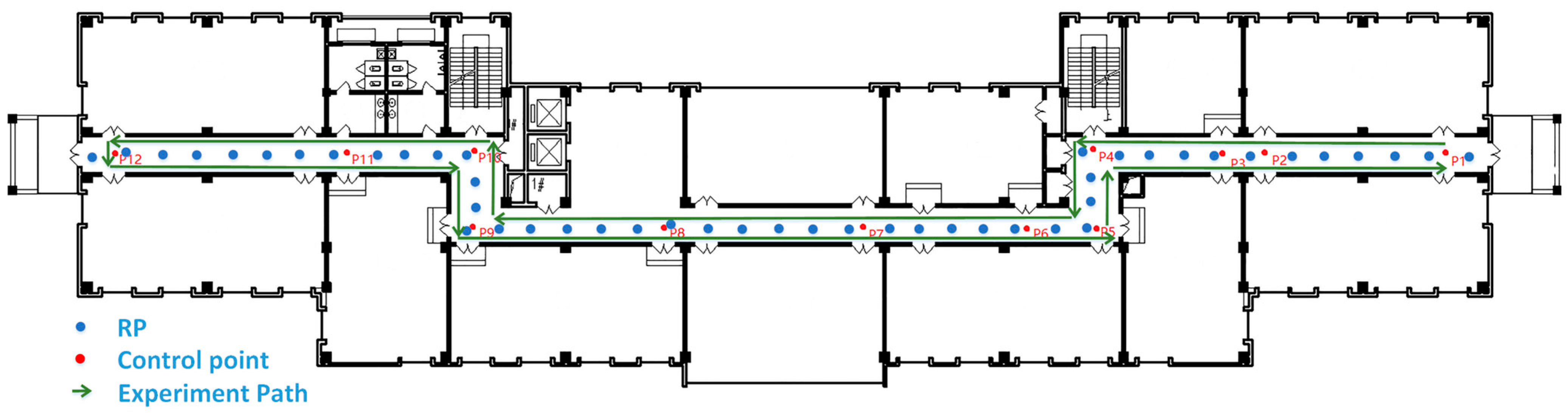
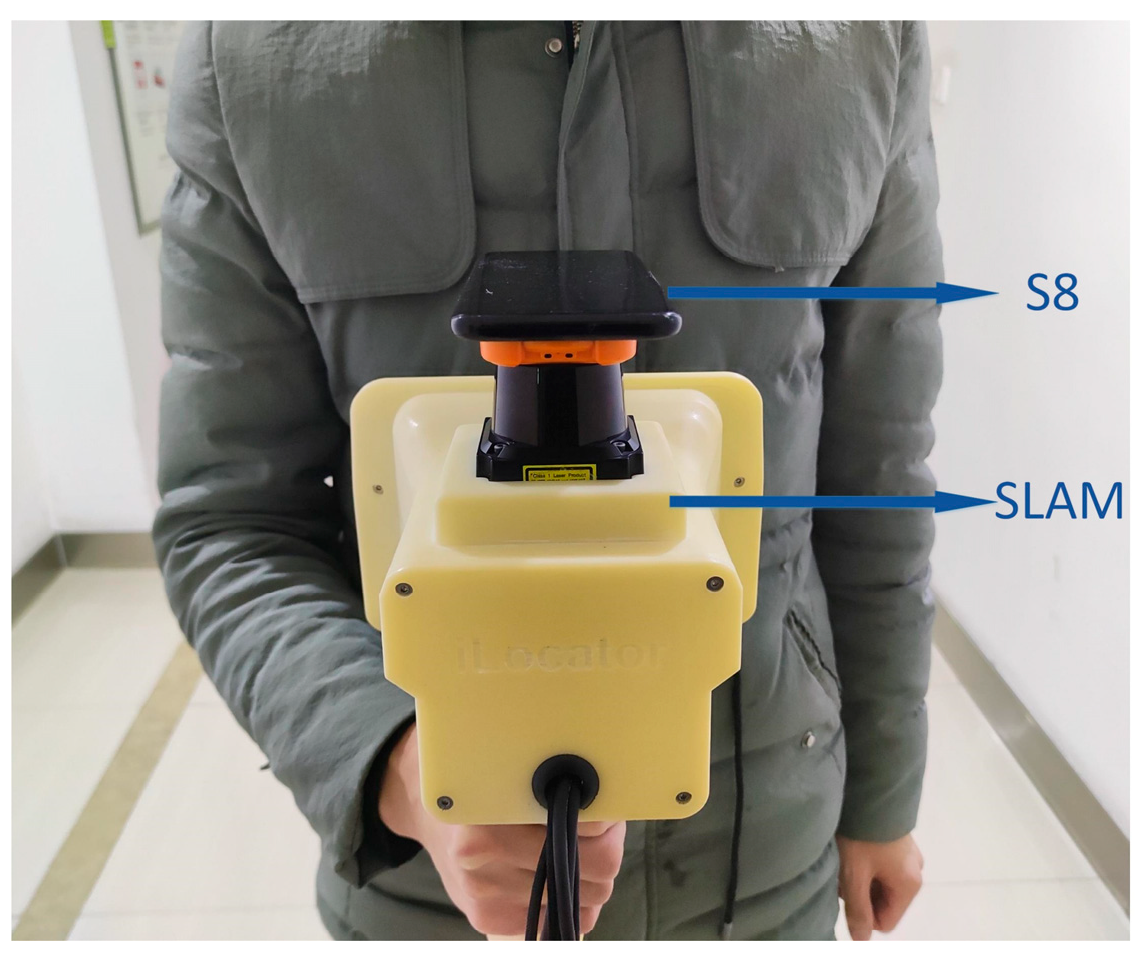
5.1. Experimental Environment Deployment
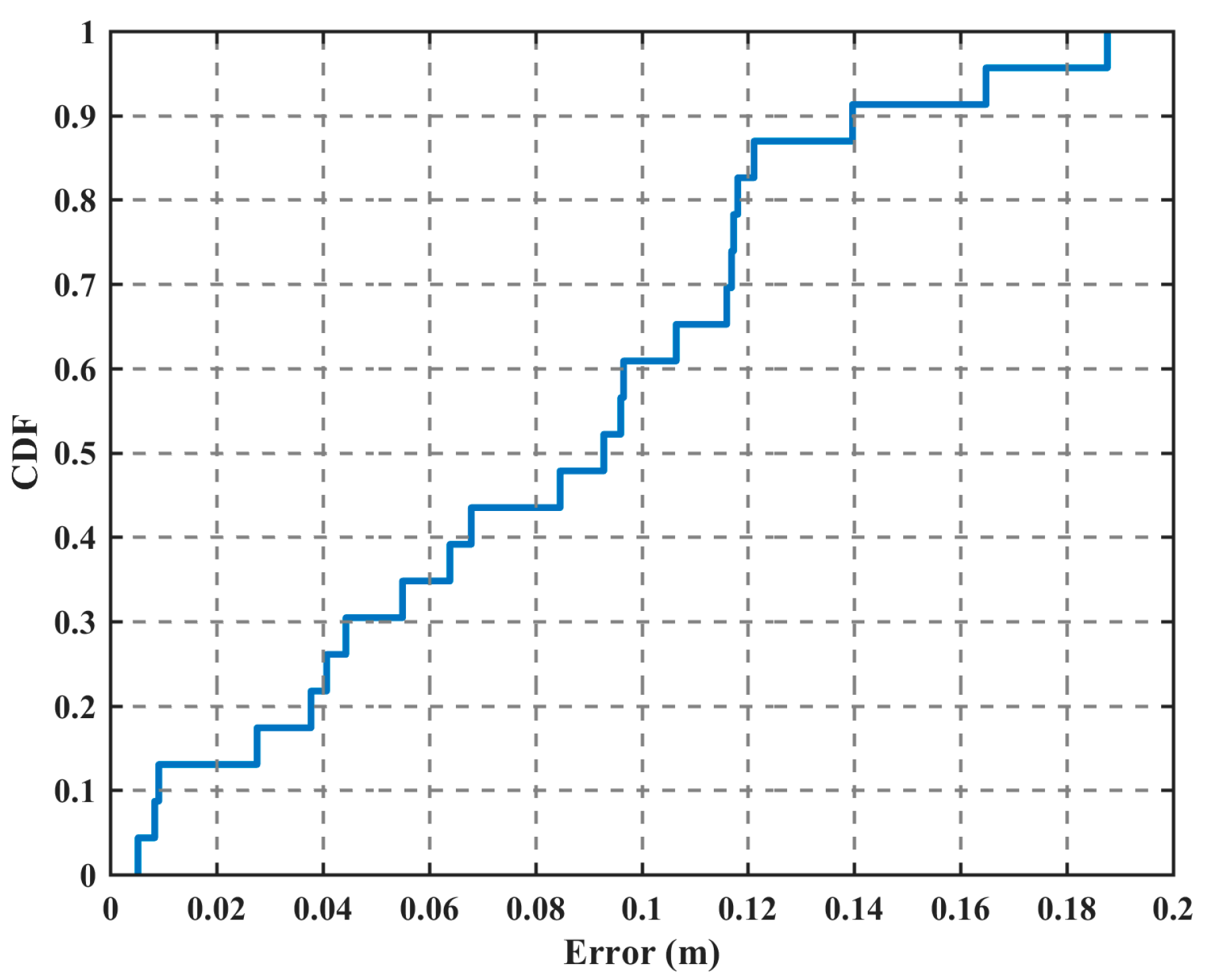
5.2. Experimental Setup and Performance
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, J.; Chen, R.; Chen, Y.; Pei, L.; Chen, L. iParking: An Intelligent Indoor Location-Based Smartphone Parking Service. Sensors 2012, 12, 14612–14629. [Google Scholar] [CrossRef]
- Pei, L.; Chen, R.; Chen, Y.; Leppäkoski, H.; Perttula, A. Indoor/Outdoor Seamless Positioning Technologies Integrated on Smart Phone. In Proceedings of the 2009 First International Conference on Advances in Satellite and Space Communications, Washington, DC, USA, 20–25 July 2009; pp. 141–145. [Google Scholar]
- Wang, L.; Chen, R.; Shen, L.; Qiu, H.; Li, M.; Zhang, P.; Pan, Y. NLOS Mitigation in Sparse Anchor Environments with the Misclosure Check Algorithm. Remotesensing 2019, 11, 773. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; KroGer, T.; Chen, R. Bayesian Fusion for Indoor Positioning Using Bluetooth Fingerprints. Wirel. Pers. Commun. 2013, 70, 1735–1745. [Google Scholar] [CrossRef]
- Ye, F.; Chen, R.; Guo, G.; Peng, X.; Liu, Z.; Huang, L. A Low-Cost Single-Anchor Solution for Indoor Positioning Using BLE and Inertial Sensor Data. IEEE Access 2019, 7, 162439–162453. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Guo, G.; Liu, Z. A Robust Dead Reckoning Algorithm Based on Wi-Fi FTM and Multiple Sensors. Remote Sens. 2019, 11, 504. [Google Scholar] [CrossRef] [Green Version]
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781. [Google Scholar] [CrossRef]
- Xie, B.; Tan, G.; He, T. SpinLight: A High Accuracy and Robust Light Positioning System for Indoor Applications. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, Korea, 1–4 November 2015; pp. 211–223. [Google Scholar]
- Liu, Z.; Chen, R.; Ye, F.; Guo, G.; Li, Z.; Qian, L. Improved TOA Estimation Method for Acoustic Ranging in a Reverberant Environment. IEEE Sens. J. 2020, 1. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S.; Honorato, J.C.P.; Rosas, J.I.G. Accurate Pedestrian Indoor Navigation by Tightly Coupling Foot-Mounted IMU and RFID Measurements. IEEE Trans. Instrum. Meas. 2012, 61, 178–189. [Google Scholar] [CrossRef] [Green Version]
- Pengzhan, C.; Ye, K.; Xiaoyue, C. A UWB/Improved PDR Integration Algorithm Applied to Dynamic Indoor Positioning for Pedestrians. Sensors 2017, 17, 2065. [Google Scholar]
- Kuang, J.; Niu, X.; Zhang, P.; Chen, X. Indoor Positioning Based on Pedestrian Dead Reckoning and Magnetic Field Matching for Smartphones. Sensors 2018, 18, 4142. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, X.; Chen, R.; Li, M.; Guo, B.; Niu, X.; Zhang, W. Design of a Smartphone Indoor Positioning Dynamic Ground Truth Reference System Using Robust Visual Encoded Targets. Sensors 2019, 19, 1261. [Google Scholar] [CrossRef] [Green Version]
- Teng, W.; Jingbin, L.; Zheng, L.; Keke, L.; Beini, X. Accurate Smartphone Indoor Visual Positioning Based on a High-Precision 3D Photorealistic Map. Sensors 2018, 18, 1974. [Google Scholar]
- Jimenez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A comparison of Pedestrian Dead-Reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Tian, Q.; Salcic, Z.; Wang, I.K.; Pan, Y. A Multi-Mode Dead Reckoning System for Pedestrian Tracking Using Smartphones. IEEE Sens. J. 2016, 16, 2079–2093. [Google Scholar] [CrossRef]
- Jiuchao, Q.; Jiabin, M.; Rendong, Y.; Peilin, L.; Ling, P. An improved indoor localization method using smartphone inertial sensors. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard, France, 28–31 October 2013; pp. 1–7. [Google Scholar]
- Qiu, S.; Wang, Z.; Zhao, H.; Qin, K.; Li, Z.; Hu, H. Inertial/magnetic sensors based pedestrian dead reckoning by means of multi-sensor fusion. Inf. Fusion 2017, 39, 108–119. [Google Scholar] [CrossRef] [Green Version]
- Alzantot, M.; Youssef, M. UPTIME: Ubiquitous pedestrian tracking using mobile phones. In Proceedings of the 2012 IEEE Wireless Communications and Networking Conference (WCNC), Paris, France, 1–4 April 2012; pp. 3204–3209. [Google Scholar]
- Fan, Q.; Zhang, H.; Pan, P.; Zhuang, X.; Jia, J.; Zhang, P.; Zhao, Z.; Zhu, G.; Tang, Y. Improved Pedestrian Dead Reckoning Based on a Robust Adaptive Kalman Filter for Indoor Inertial Location System. Sensors 2019, 19, 294. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiao, Z.; Wen, H.; Markham, A.; Trigoni, N. Robust Indoor Positioning With Lifelong Learning. IEEE J. Sel. Areas Commun. 2014, 33, 2287–2301. [Google Scholar] [CrossRef]
- Wang, L.; Chen, R.; Chen, L.; Shen, L.; Zhang, P.; Pan, Y.; Li, M. A Robust Filter for TOA Based Indoor Localization in Mixed LOS/NLOS Environment. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018; pp. 1–9. [Google Scholar]
- Guo, G.; Chen, R.; Ye, F.; Chen, L.; Pan, Y.; Liu, M.; Cao, Z. A Pose Awareness Solution for Estimating Pedestrian Walking Speed. Remote Sens. 2019, 11, 55. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Chen, R.; Pei, L.; Chen, W.; Tenhunen, T.; Kuusniemi, H.; Kröger, T.; Chen, Y. Accelerometer assisted robust wireless signal positioning based on a hidden Markov model. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 488–497. [Google Scholar]
- Li, Z.; Liu, J.; Yang, F.; Niu, X.; Li, L.; Wang, Z.; Chen, R. A Bayesian Density Model Based Radio Signal Fingerprinting Positioning Method for Enhanced Usability. Sensors 2018, 18, 4063. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, F.; Xiong, J.; Liu, J.; Wang, C.; Chen, R. A Pairwise SSD Fingerprinting Method of Smartphone Indoor Localization for Enhanced Usability. Remote Sens. 2019, 11, 566. [Google Scholar] [CrossRef] [Green Version]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE INFOCOM 2000, Conference on Computer Communications. Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; pp. 775–784. [Google Scholar]
- Wang, B.; Gan, X.; Liu, X.; Yu, B.; Jia, R.; Huang, L.; Jia, H. A Novel Weighted KNN Algorithm Based on RSS Similarity and Position Distance for Wi-Fi Fingerprint Positioning. IEEE Access 2020, 8, 30591–30602. [Google Scholar] [CrossRef]
- Weixing, X.; Xianghong, H.; Qingquan, L.; Kegen, Y.; Weining, Q.; Baoding, Z.; Kai, C. A New Weighted Algorithm Based on the Uneven Spatial Resolution of RSSI for Indoor Localization. IEEE Access 2018, 6, 26588–26595. [Google Scholar]
- Jingxue, B.; Yunjia, W.; Xin, L.; Hongxia, Q.; Hongji, C.; Shenglei, X. An Adaptive Weighted KNN Positioning Method Based on Omnidirectional Fingerprint Database and Twice Affinity Propagation Clustering. Sensors 2018, 18, 2502. [Google Scholar]
- Xuming, F.; Zonghua, J.; Lei, N.; Lijun, C. Optimal weighted K-nearest neighbour algorithm for wireless sensor network fingerprint localisation in noisy environment. IET Commun. 2018, 12, 1171–1177. [Google Scholar]
- Jianwei, N.; Banghui, L.; Long, C.; Yu, G.; Lei, S. ZiLoc: Energy efficient WiFi fingerprint-based localization with low-power radio. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 4558–4563. [Google Scholar]
- Brunato, M.; Battiti, R. Statistical learning theory for location fingerprinting in wireless LANs. Comput. Netw. 2005, 47, 825–845. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Shang, J.; Gu, F.; Han, Q. Improving Wi-Fi Indoor Positioning via AP Sets Similarity and Semi-Supervised Affinity Propagation Clustering. Int. J. Distrib. Sens. Netw. 2015, 2015, 1–11. [Google Scholar] [CrossRef]
- Li, D.; Zhang, B.; Yao, Z.; Li, C. A feature scaling based k-nearest neighbor algorithm for indoor positioning system. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014; pp. 436–441. [Google Scholar]
- Wang, B.; Liu, X.; Yu, B.; Jia, R.; Gan, X. An Improved WiFi Positioning Method Based on Fingerprint Clustering and Signal Weighted Euclidean Distance. Sensors 2019, 19, 2300. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kushki, A.; Plataniotis, K.N.; Venetsanopoulos, A.N. Kernel-Based Positioning in Wireless Local Area Networks. IEEE Trans. Mob. Comput. 2007, 6, 689–705. [Google Scholar] [CrossRef] [Green Version]
- Yu, F.; Jiang, M.H.; Liang, J.; Qin, X.; Hu, M.; Peng, T.; Hu, X.R. An Indoor Localization of WiFi Based on Support Vector Machines. Adv. Mater. Res. 2014, 926–930, 2438–2441. [Google Scholar] [CrossRef]
- Xu, C.; Jia, Z.; Chen, P.; Wang, B. CSI-based autoencoder classification for Wi-Fi indoor localization. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 6523–6528. [Google Scholar]
- Khatab, Z.E.; Hajihoseini, A.; Ghorashi, S.A. A Fingerprint Method for Indoor Localization Using Autoencoder Based Deep Extreme Learning Machine. IEEE Sens. Lett. 2018, 2, 1–4. [Google Scholar] [CrossRef]
- Wang, R.; Li, Z.; Luo, H.; Zhao, F.; Wang, Q. A Robust Wi-Fi Fingerprint Positioning Algorithm Using Stacked Denoising Autoencoder and Multi-Layer Perceptron. Remote Sens. 2019, 11, 1293. [Google Scholar] [CrossRef] [Green Version]
- Sinha, R.S.; Lee, S.M.; Rim, M.; Hwang, S.H. Data Augmentation Schemes for Deep Learning in an Indoor Positioning Application. Electronics 2019, 8, 554. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Zou, H.; Yang, J.F.; Jiang, H.; Xie, L. WiFi Fingerprinting Indoor Localization Using Local Feature-Based Deep LSTM. IEEE Syst. J. 2020, 14, 3001–3010. [Google Scholar] [CrossRef]
- Gu, Y.; Chen, Y.; Liu, J.; Jiang, X. Semi-supervised deep extreme learning machine for Wi-Fi based localization. Neurocomputing 2015, 166, 282–293. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, K.; Zhang, W.; Zhang, Y.; Gu, J. Deep Neural Networks for wireless localization in indoor and outdoor environments. Neurocomputing 2016, 194, 279–287. [Google Scholar] [CrossRef]
- Liu, G.; Qian, Z.; Wang, X. An Indoor WLAN Location Algorithm Based on Fingerprint Database Processing. Int. J. Pattern Recognit. Artif. Intell. 2019, 34, 1–18. [Google Scholar] [CrossRef]
- Rizk, H.; Torki, M.; Youssef, M. CellinDeep: Robust and Accurate Cellular-based Indoor Localization via Deep Learning. Ieee Sens. J. 2018, 19, 2305–2312. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, W.; Zhao, H.; Cao, S.; Fu, S.; Jiang, D. Bisecting k-means based fingerprint indoor localization. Wirel. Netw. 2020, 1–10. [Google Scholar] [CrossRef]
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhao, L.; Qin, C.; Wang, Y. WiFi/PDR integrated navigation with robustly constrained Kalman filter. Meas. Sci. Technol. 2020, 31, 084002. [Google Scholar] [CrossRef]
- Hu, Y.; Liao, X.; Lu, Q.; Xu, S.; Zhu, W. A segment-based fusion algorithm of WiFi fingerprinting and pedestrian dead reckoning. In Proceedings of the 2016 IEEE/CIC International Conference on Communications in China (ICCC), Chengdu, China, 27–29 July 2016; pp. 1–6. [Google Scholar]
- Guoliang, C.; Xiaolin, M.; Yunjia, W.; Yanzhe, Z.; Peng, T.; Huachao, Y. Integrated WiFi/PDR/Smartphone Using an Unscented Kalman Filter Algorithm for 3D Indoor Localization. Sensors 2015, 15, 24595–24614. [Google Scholar]
- Jian, C.; Gang, O.; Ao, P.; Lingxiang, Z.; Jianghong, S. An INS/WiFi Indoor Localization System Based on the Weighted Least Squares. Sensors 2018, 18, 1458. [Google Scholar]
- Li, Y.; Zhuang, Y.; Zhang, P.; Lan, H.; Niu, X.; El-Sheimy, N. An improved inertial/wifi/magnetic fusion structure for indoor navigation. Inf. Fusion 2017, 34, 101–119. [Google Scholar] [CrossRef]
- Zhou, N.-X.; Fan, X.-Y.; Xia, P.-C.; Zhou, F. A Sliding Window Fusion Location Algorithm Based on WI-FI/PDR. In Proceedings of the Communications, Signal Processing, and Systems, Singapore, Singapore, 20–22 July 2019; pp. 2608–2615. [Google Scholar]
- Deng, Z.A.; Wang, G.; Qin, D.; Na, Z.; Yang, C.; Chen, J. Continuous Indoor Positioning Fusing WiFi, Smartphone Sensors and Landmarks. Sensors 2016, 16, 1427. [Google Scholar] [CrossRef] [Green Version]
- Ke, M.; Xu, Y.; Anpalagan, A.; Liu, D.; Zhang, Y. Distributed TOA-Based Positioning in Wireless Sensor Networks: A Potential Game Approach. IEEE Commun. Lett. 2018, 22, 316–319. [Google Scholar] [CrossRef]
- Napoleon, S.A.; Omar, A.S.; Elramly, S.H.; Khamis, S.A.; Nasr, M.E. C5. Time difference of arrival by IEEE 802.11a, g based on practical estimation. In Proceedings of the 2012 29th National Radio Science Conference (NRSC), Cairo, Egypt, 10–12 April 2012; pp. 185–190. [Google Scholar]
- Chuang, S.; Wu, W.; Liu, Y. High-Resolution AoA Estimation for Hybrid Antenna Arrays. IEEE Trans. On Antennas Propag. 2015, 63, 2955–2968. [Google Scholar] [CrossRef]
- Fang, S.; Cheng, Y.; Chien, Y. Exploiting Sensed Radio Strength and Precipitation for Improved Distance Estimation. IEEE Sens. J. 2018, 18, 6863–6873. [Google Scholar] [CrossRef]
- Mazarbhuiya, F.A.; AlZahrani, M.Y.; Georgieva, L. Anomaly Detection Using Agglomerative Hierarchical Clustering Algorithm. In Proceedings of the Information Science and Applications 2018, Singapore, Singapore, 25–27 June 2018; pp. 475–484. [Google Scholar]
- Alvarenga, S.C.D.; Barbon, S.; Miani, R.S.; Cukier, M.; Zarpelo, B.B. Process mining and hierarchical clustering to help intrusion alert visualization. Comput. Secur. 2017, 73, 474–491. [Google Scholar] [CrossRef]
- Chambodut, A. Geomagnetic Field, IGRF. In Encyclopedia of Solid Earth Geophysics; Gupta, H.K., Ed.; Springer: Dordrecht, The Netherlands, 2011; pp. 379–380. [Google Scholar]
- Chambodut, A. Geomagnetic Field, IGRF. Encycl. Earth Sci. 2015, 379–380. [Google Scholar]
- Cui, Y.; Zhang, Y.; Huang, Y.; Wang, Z.; Fu, H. Novel WiFi/MEMS integrated indoor navigation system based on two-stage EKF. Micromachines 2019, 10, 198. [Google Scholar] [CrossRef] [Green Version]
- Evennou, F.; Franois, M. Advanced Integration of WiFi and Inertial Navigation Systems for Indoor Mobile Positioning. Eurasip J. Adv. Signal Process. 2006, 2006, 086706. [Google Scholar] [CrossRef] [Green Version]
- Yuanxi, Y. Chinese geodetic coordinate system 2000. Chin. Sci. Bull. 2009, 2714–2721. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Youkun, W.; Zhangrong, Y.U.; Junhua, Z.; Shengchun, S.H.I. Precision analysis and control method of inverse calculation of plane four parameter. Bull. Surv. Mapp. 2020, 10, 63–67. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Complementary Characteristics | Case | Two Coupled Vectors |
|---|---|---|
| ≈ | Case1 | |
| Case2 | ||
| ≠ | Case3 |
| Control Point & Strategy | Error (m) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMS | 95% | 68% | Mean | Maximum | Minimum | ||||||||
| P1 | AGNES | 0.87 | 70.6% * | 1.02 | 86.1% * | 0.89 | 45.1% * | 0.87 | 61.7% * | 1.09 | 85.1% * | 0.79 | 2.5% * |
| NO-AGNES | 2.96 | 7.34 | 1.62 | 2.27 | 7.34 | 0.81 | |||||||
| P2 | AGNES | 0.58 | 77.7% * | 0.63 | 85.1% * | 0.63 | 63.6% * | 0.57 | 72.6% * | 0.67 | 89.6% * | 0.36 | 42.9% * |
| NO-AGNES | 2.6 | 4.23 | 1.73 | 2.08 | 6.47 | 0.63 | |||||||
| P4 | AGNES | 1.14 | 51.1% * | 2.05 | 57.1% * | 0.67 | 67.3% * | 0.93 | 41.9% * | 2.05 | 85.2% * | 0.44 | 25.4% * |
| NO-AGNES | 2.33 | 4.78 | 2.05 | 1.6 | 13.89 | 0.59 | |||||||
| P5 | AGNES | 0.50 | 60.6% * | 0.58 | 71.8% * | 0.53 | 48.0% * | 0.49 | 58.8% * | 0.60 | 70.9% * | 0.36 | 61.7% * |
| NO-AGNES | 1.27 | 2.06 | 1.02 | 1.19 | 2.06 | 0.94 | |||||||
| P6 | AGNES | 0.45 | 76.2% * | 0.67 | 75.5% * | 0.56 | 71.1% * | 0.40 | 69.0% * | 0.85 | 93.1% * | 0.21 | 0.0% * |
| NO-AGNES | 1.89 | 2.74 | 1.94 | 1.33 | 12.32 | 0.21 | |||||||
| P7 | AGNES | 0.41 | 83.9% * | 0.59 | 88.8% * | 0.52 | 61.5% * | 0.38 | 78.4% * | 0.61 | 94.5% * | 0.19 | 72.5% * |
| NO-AGNES | 2.54 | 5.27 | 1.35 | 1.76 | 11.06 | 0.69 | |||||||
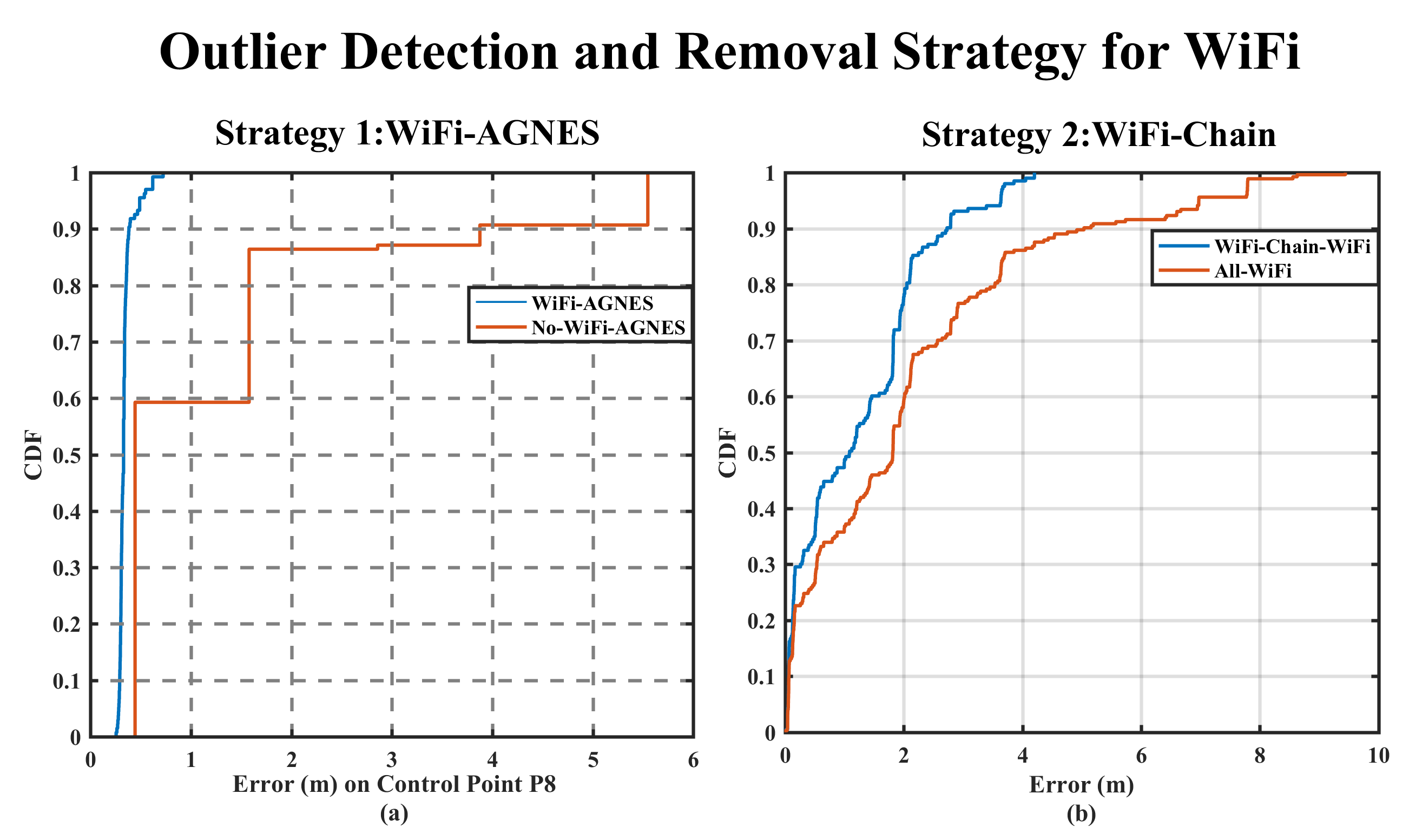
| P8 | AGNES | 0.35 | 83.0% * | 0.49 | 91.2% * | 0.34 | 78.5% * | 0.34 | 75.2% * | 0.72 | 87.0% * | 0.26 | 40.9% * |
| NO-AGNES | 2.06 | 5.55 | 1.58 | 1.37 | 5.55 | 0.44 | |||||||
| P10 | AGNES | 0.22 | 83.5% * | 0.28 | 88.5% * | 0.24 | 66.7% * | 0.21 | 80.6% * | 0.35 | 85.7% * | 0.07 | 86.5% * |
| NO-AGNES | 1.33 | 2.44 | 0.72 | 1.08 | 2.44 | 0.52 | |||||||
| P11 | AGNES | 0.90 | 20.4% * | 0.92 | 17.1% * | 0.92 | 17.1% * | 0.90 | 15.1% * | 0.92 | 68.8% * | 0.57 | 38.0% * |
| NO-AGNES | 1.13 | 1.11 | 1.11 | 1.06 | 2.95 | 0.92 | |||||||
| Algorithm | Error (m) | |||||
|---|---|---|---|---|---|---|
| RMS | 95% | 68% | Mean | Maximum | Minimum | |
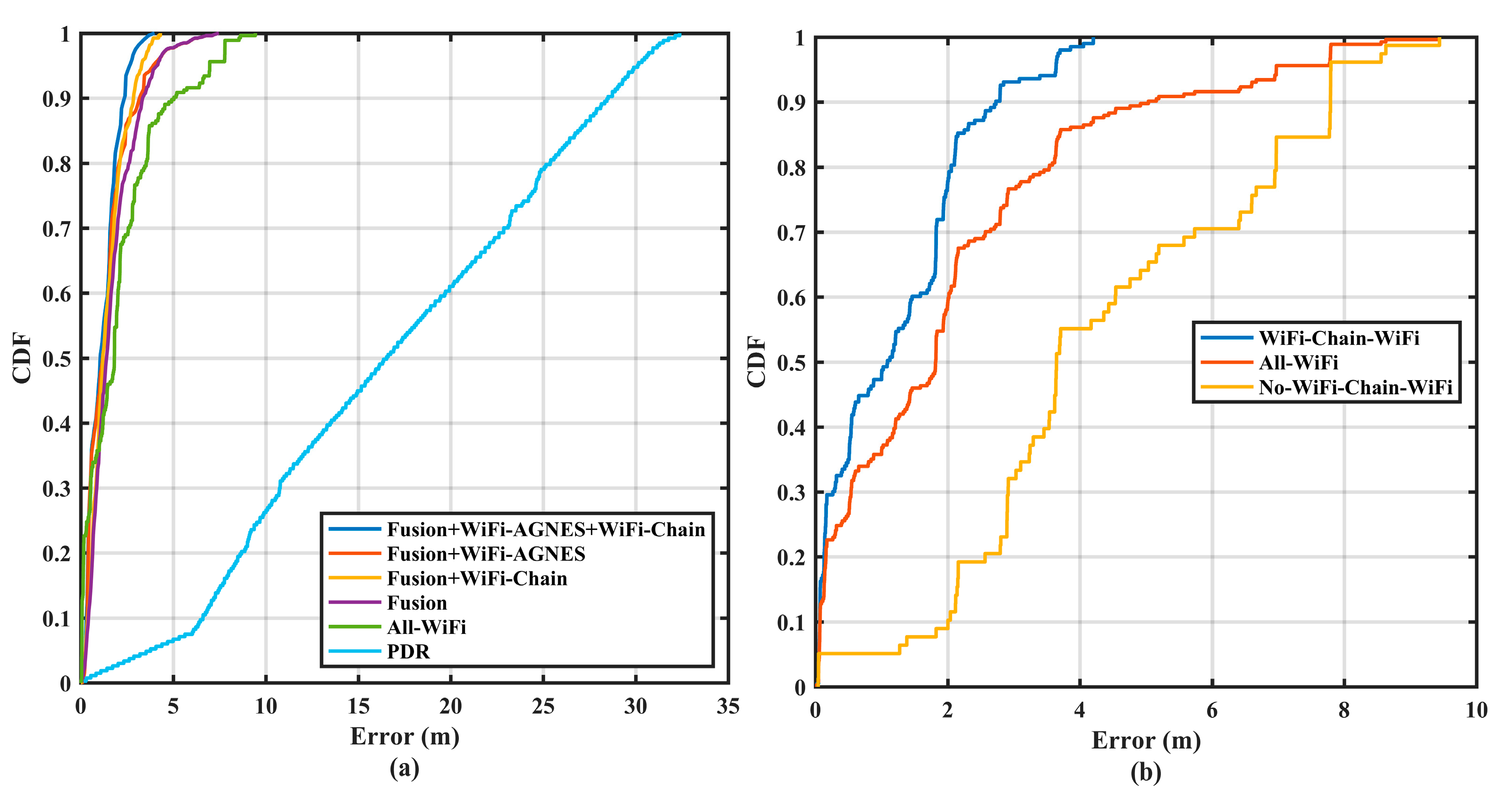
| Fusion +WiFi-AGNES+WiFi-Chain | 1.43 | 2.64 | 1.56 | 1.19 | 3.99 | 0.02 |
| Fusion+WiFi-AGNES | 1.89 | 3.91 | 1.62 | 1.44 | 7.47 | 0.04 |
| Fusion+WiFi-Chain | 1.69 | 3.27 | 1.75 | 1.42 | 4.30 | 0.02 |
| Fusion | 2.08 | 4.12 | 1.93 | 1.67 | 7.47 | 0.04 |
| PDR | 18.83 | 30.10 | 22.31 | 16.87 | 32.37 | 0.25 |
| All-WiFi | 2.97 | 6.97 | 2.25 | 2.10 | 9.44 | 0.02 |
| WiFi-Chain-WiFi | 1.64 | 3.64 | 1.82 | 1.23 | 4.2 | 0.02 |
| No-WiFi-Chain-WiFi | 4.96 | 7.79 | 5.19 | 4.39 | 9.44 | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Liu, J.; Wang, L.; Guo, G.; Zheng, X.; Gong, X.; Yang, S.; Huang, G. An Enhanced Smartphone Indoor Positioning Scheme with Outlier Removal Using Machine Learning. Remote Sens. 2021, 13, 1106. https://doi.org/10.3390/rs13061106
Zhang Z, Liu J, Wang L, Guo G, Zheng X, Gong X, Yang S, Huang G. An Enhanced Smartphone Indoor Positioning Scheme with Outlier Removal Using Machine Learning. Remote Sensing. 2021; 13(6):1106. https://doi.org/10.3390/rs13061106
Chicago/Turabian StyleZhang, Zhenbing, Jingbin Liu, Lei Wang, Guangyi Guo, Xingyu Zheng, Xiaodong Gong, Sheng Yang, and Gege Huang. 2021. "An Enhanced Smartphone Indoor Positioning Scheme with Outlier Removal Using Machine Learning" Remote Sensing 13, no. 6: 1106. https://doi.org/10.3390/rs13061106
APA StyleZhang, Z., Liu, J., Wang, L., Guo, G., Zheng, X., Gong, X., Yang, S., & Huang, G. (2021). An Enhanced Smartphone Indoor Positioning Scheme with Outlier Removal Using Machine Learning. Remote Sensing, 13(6), 1106. https://doi.org/10.3390/rs13061106