
Sea Ice Concentration and Sea Ice Extent Mapping with L-Band Microwave Radiometry and GNSS-R Data from the FFSCat Mission Using Neural Networks

 ,
,  ,
,  ,
,  , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. FSSCat Data
2.1.1. Microwave Radiometer Data
2.1.2. GNSS-R Data
2.2. Auxiliary Data
2.3. Sea Ice Concentration and Sea Ice Extent Retrieval Using Neural Networks
2.3.1. Sea Ice Concentration and Extent Maps Based on MWR Data
- Input layer: 5 neurons;
- 3 hidden layers: consisting of 5, 10 and 5 neurons, respectively, using the sigmoid activation function;
- Output layer: a single neuron with a continuous linear output function;
- Each of the input neurons corresponds to one variable of the same point of the EASE grid. After a selection procedure described in Section 3, the 6 input variables are:
- Brightness temperature;
- Temporal standard deviation of the brightness temperature: Computed using 10 radiometry samples (5 s window);
- Gradient of the brightness temperature: Two inputs , one for each axis;
- Land cover fraction; and
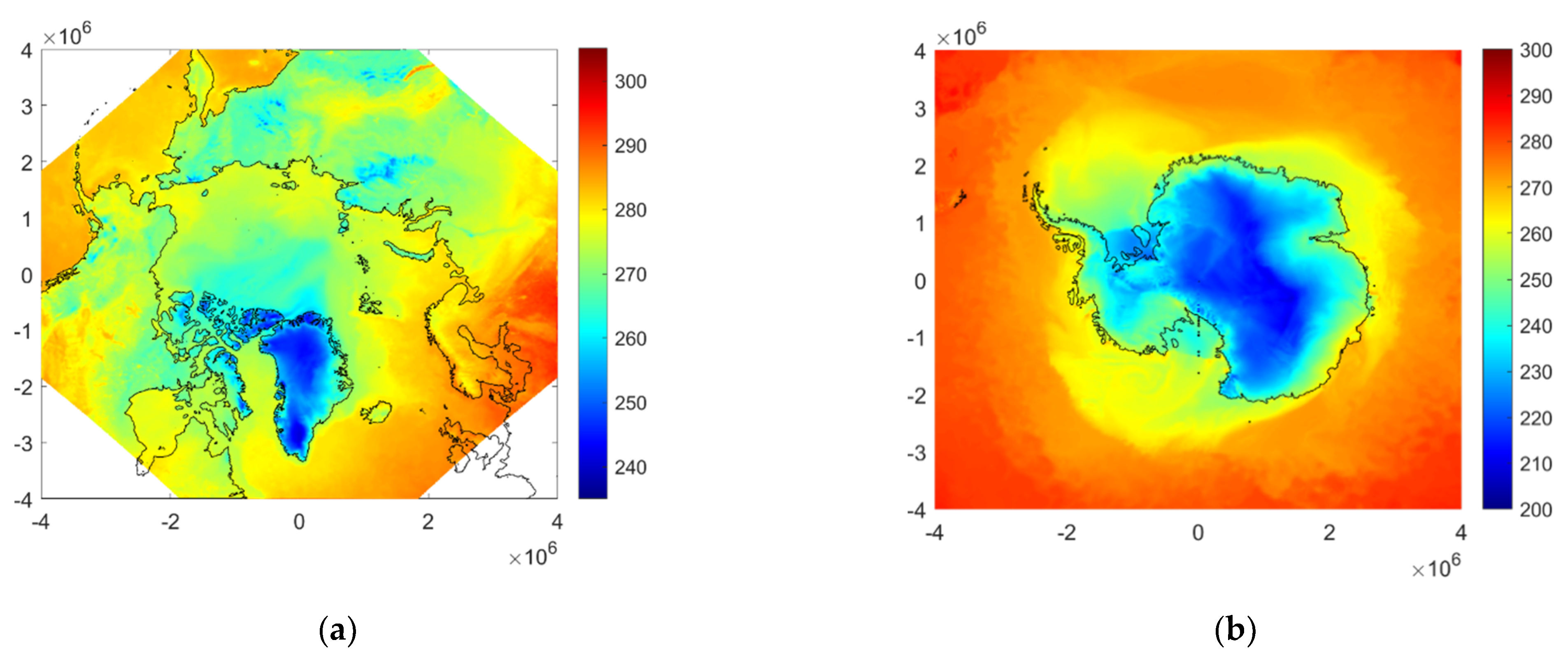
- Skin surface temperature.
2.3.2. Resolution Improvement Using GNSS-R
- Averaged Delay Doppler Map (ADDM): All the delay bins () of the DDM are averaged and normalized, dividing by the peak averaged value:
- Elevation angle of the reflected signal;
- Reflectivity;
- Standard deviation of the reflectivity;
- SNR;
- Brightness temperature: The FMPL-2 MWR brightness temperature for each point of the GNSS-R data is bilinearly interpolated into the specular reflection points;
- Land cover fraction: The LCF for each point is bilinearly interpolated into the specular reflection points; and
- Skin surface temperature: The ST for each point is bilinearly interpolated into the specular reflection points.
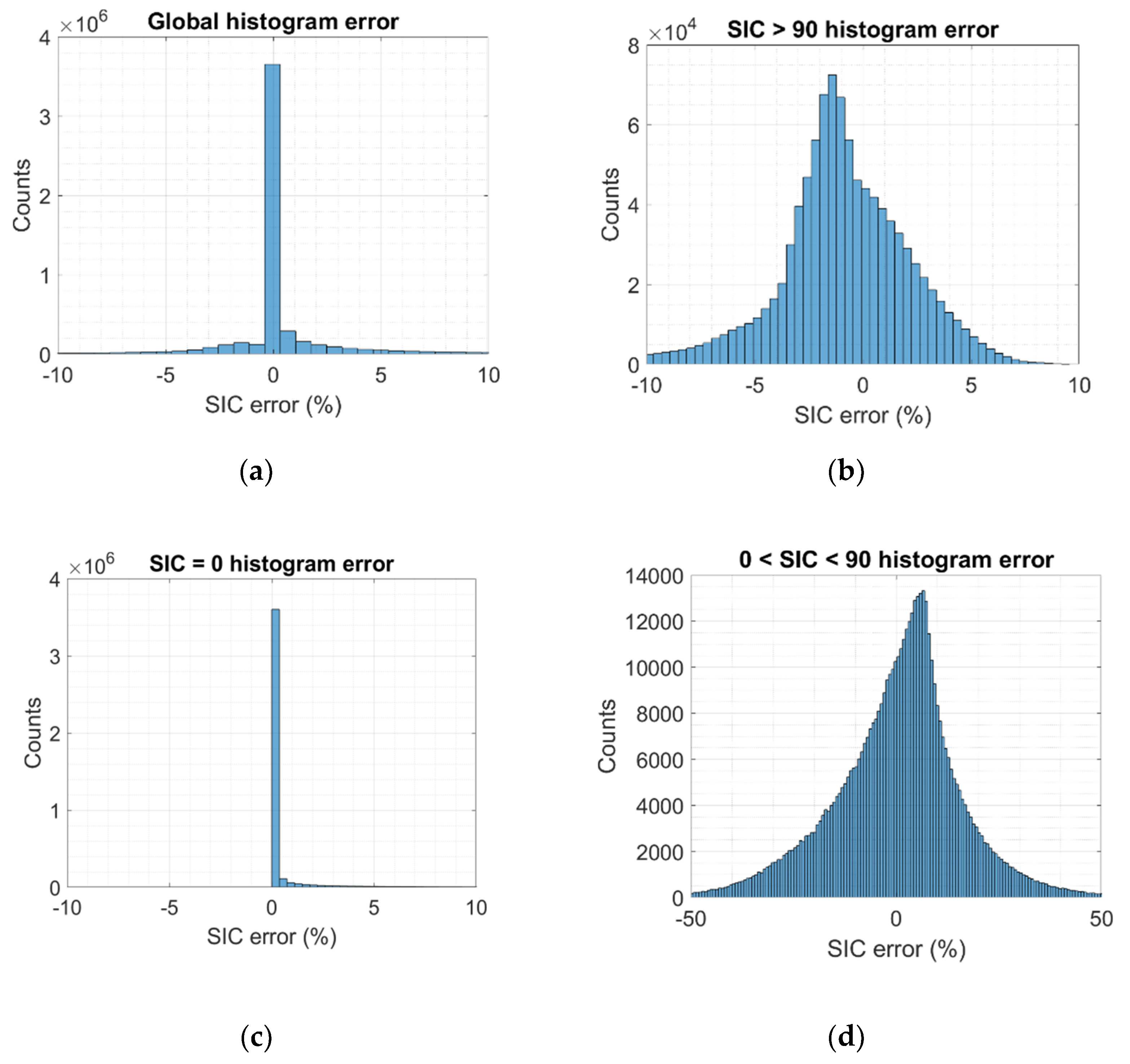
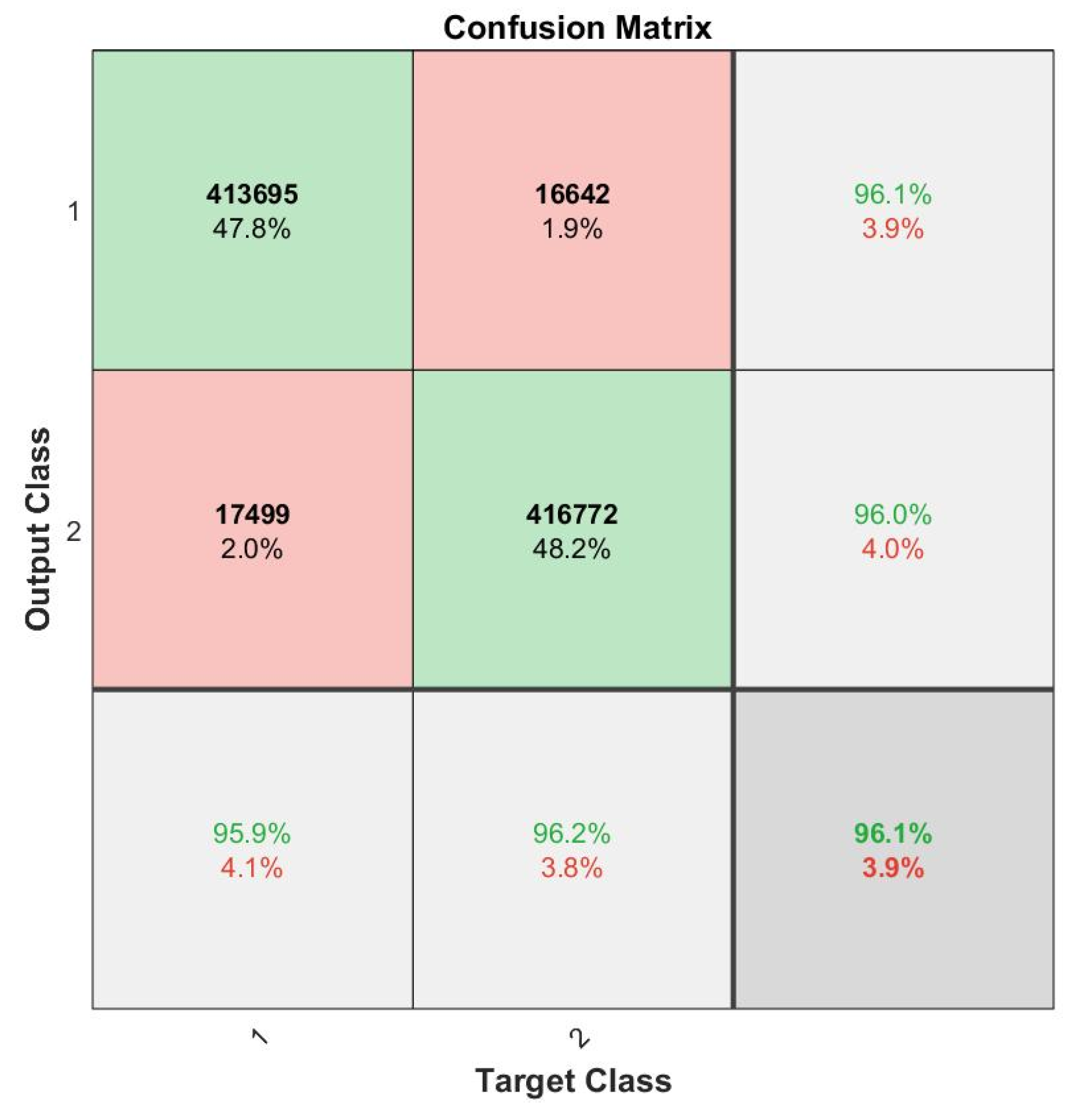
2.3.3. Performance Analysis
3. Results and Discussion
3.1. Neural Network Input Design
3.2. Sea Ice Concentration Generated Maps
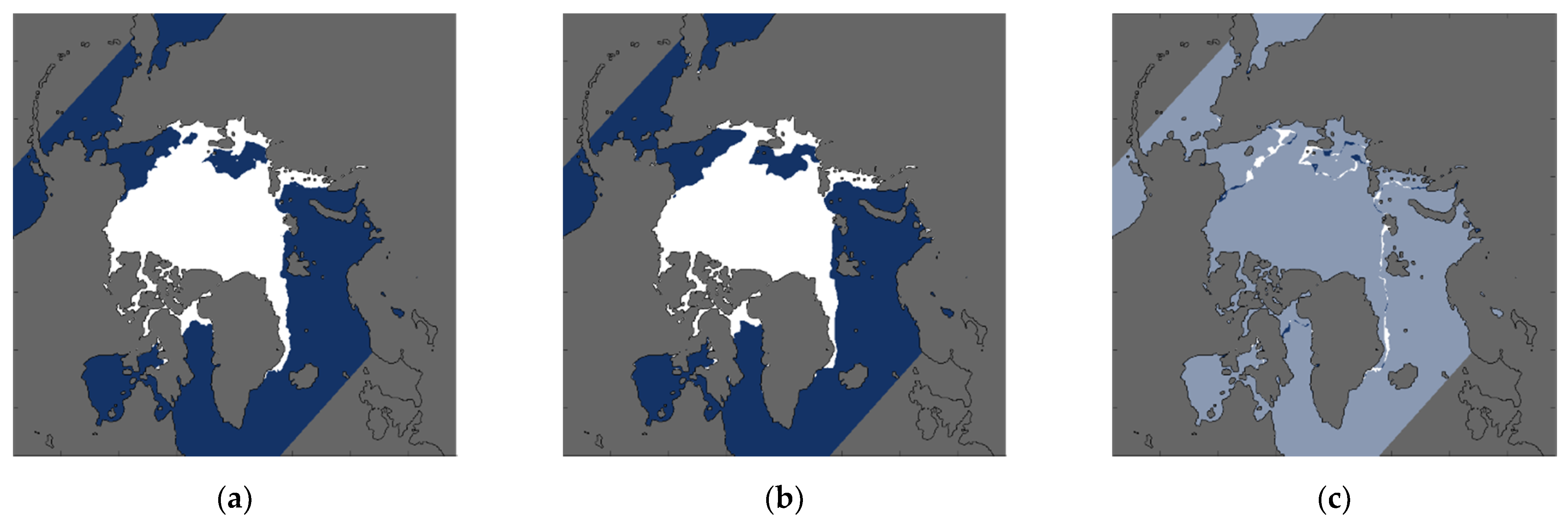
3.2.1. Arctic Ocean
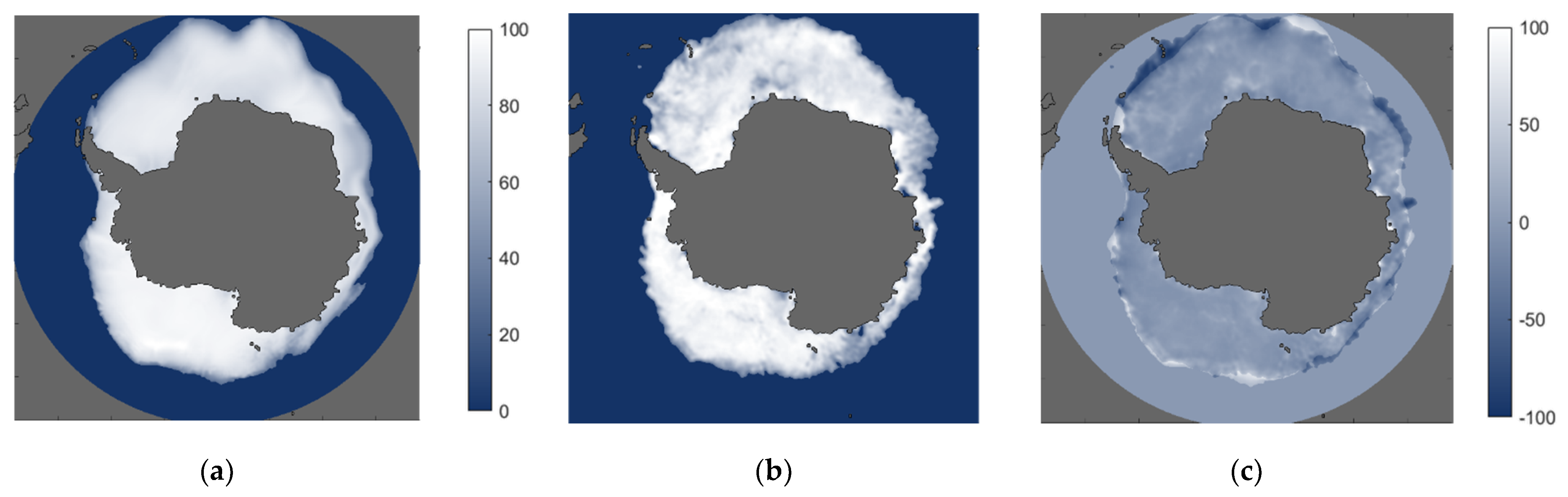
3.2.2. Antarctic Ocean
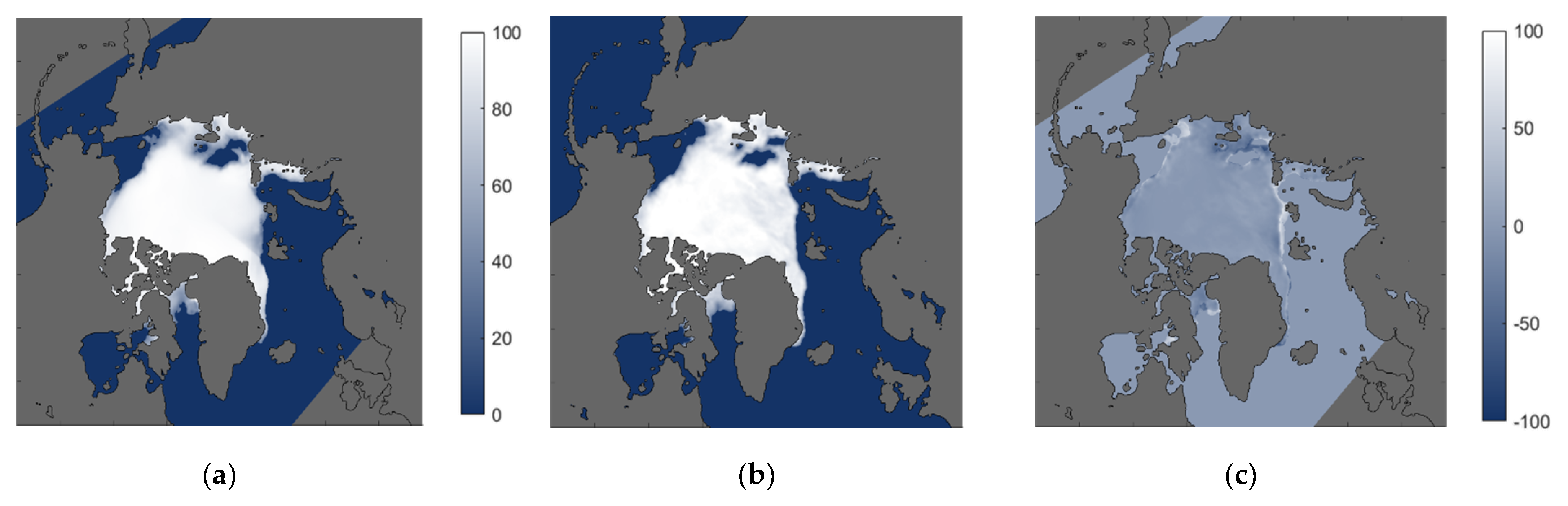
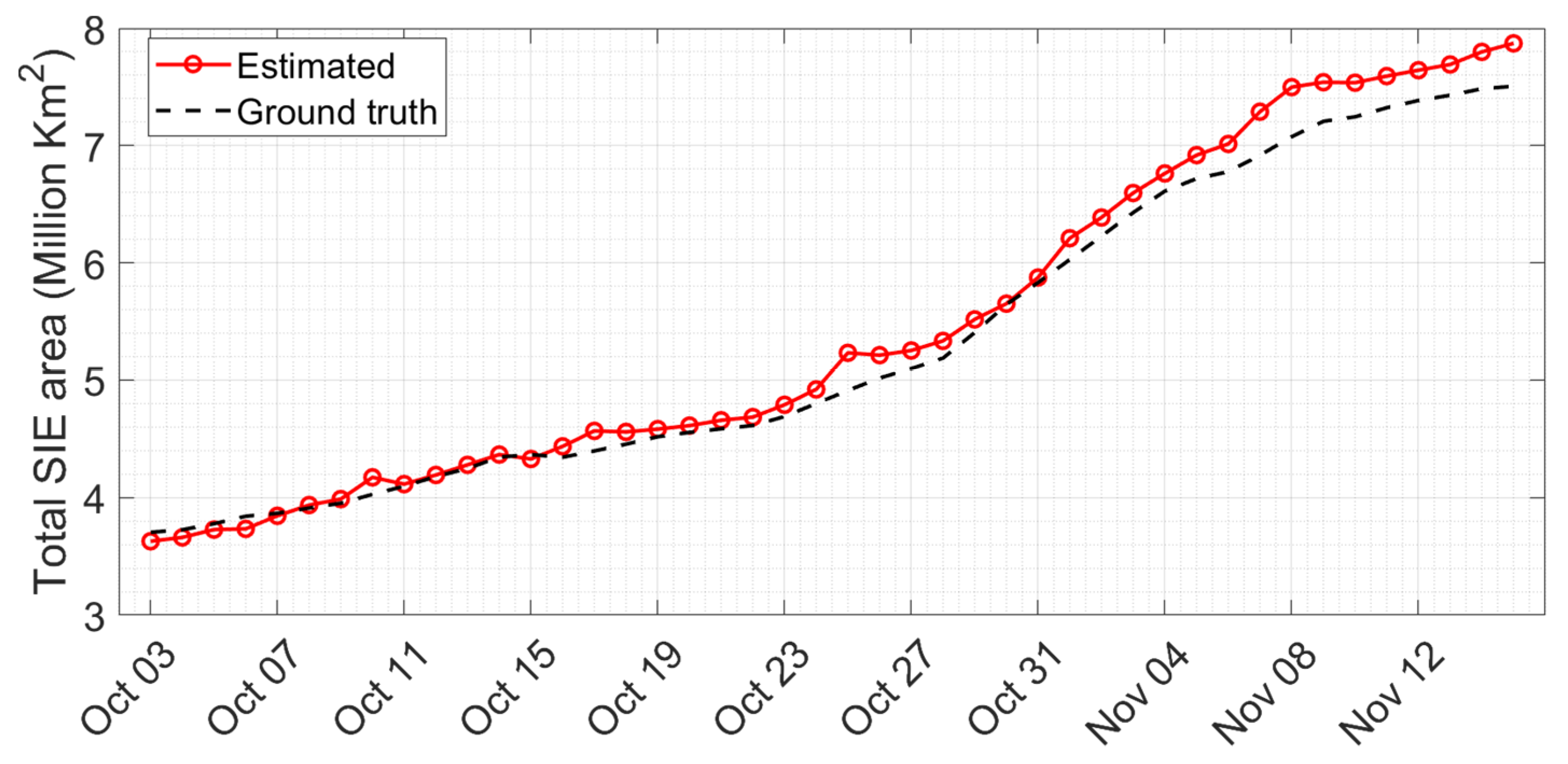
3.3. Sea Ice Extent Generated Maps
3.3.1. Arctic Ocean
3.3.2. Antarctic Ocean
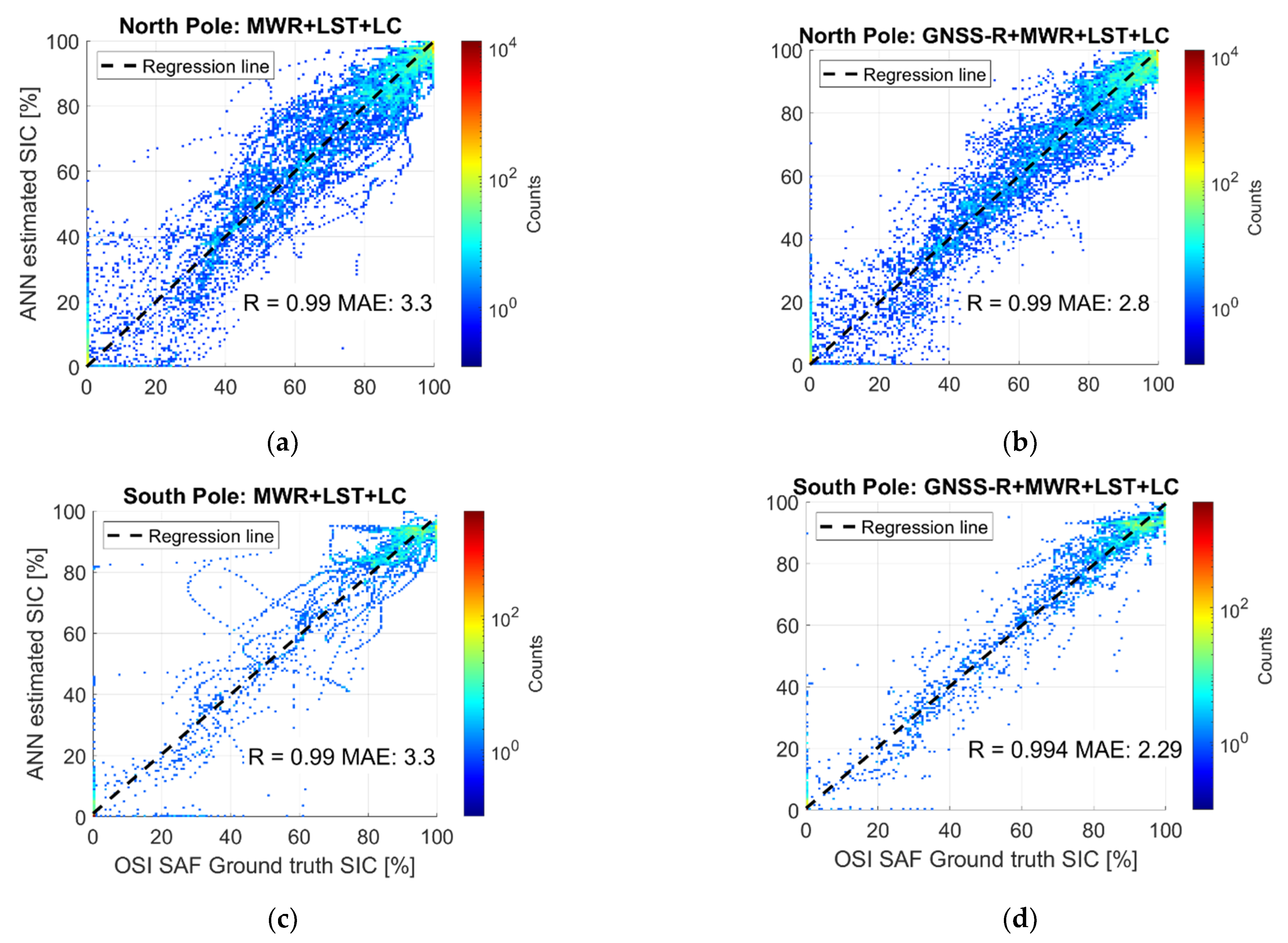
3.3.3. GNSS-R Sea Ice Concentration and Extent Estimation
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- NASA’s Jet Propulsion Laboratory. Global Climate Change, Vital Signs of the Planet. Available online: https://climate.nasa.gov/vital-signs/arctic-sea-ice/ (accessed on 20 February 2021).
- Thonboe, R.T.; Eastwood, S.; Lavergne, T.; Sørensen, A.M.; Rathmann, N.; Dybkjær, G.; Pederson, L.T.; Høyer, J.L.; Kern, S. The EUMETSAT sea ice concentration climate data record. Cryosphere 2016, 10, 2275–2290. [Google Scholar] [CrossRef] [Green Version]
- Comiso, J.C.; Cavalieri, D.J.; Parkinson, C.L.; Gloersen, P. Passive microwave algorithms for sea ice concentration: A comparison of two techniques. Remote Sens. Environ. 1997, 60, 357–384. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Zavorotny, V.U.; Camps, A. Sea Ice Detection Using U.K. TDS-1 GNSS-R Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4989–5001. [Google Scholar] [CrossRef] [Green Version]
- Yan, Q.; Huang, W.; Moloney, C. Neural Networks Based Sea Ice Detection and Concentration Retrieval From GNSS-R Delay-Doppler Maps. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3789–3798. [Google Scholar] [CrossRef]
- Kaleschke, L.; Tian-Kunze, X.; Maaß, N.; Mäkynen, M.; Drusch, M. Sea ice thickness retrieval from SMOS brightness temperatures during the Arctic freeze-up period. Geophys. Res. Lett. 2012, 39, 0094–8276. [Google Scholar] [CrossRef]
- Selva, D.; Golkar, A.; Korobova, O.; Cruz, I.L.I.; Collopy, P.; de Weck, L. Distributed Earth Satellite Systems: What is needed to move forward. J. Aerosp. Inf. Syst. 2017, 14, 412–438. [Google Scholar] [CrossRef]
- Planet Labs Inc. Planet. Available online: https://www.planet.com/ (accessed on 1 March 2021).
- Spire Global. Spire. Available online: https://spire.com/ (accessed on 1 March 2021).
- Camps, A.; Golkar, A.; Gutierrez, A.; de Azua, J.A.R.; Munoz-Martin, J.F.; Fernandez, L.; Diez, C.; Aguilella, A.; Briatoreet, S.; Akhtyamov, R. FSSCat, the 2017 Copernicus Masters’ “Esa Sentinel Small Satellite Challenge” Winner: A Federated Polar and Soil Moisture Tandem Mission Based on 6U Cubesats. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8285–8287. [Google Scholar] [CrossRef]
- Camps, A.; Muñoz-Martin, J.F.; Ruiz-de-Azúa, J.A.; Fernández, L.; Pérez-Portero, A.; Llavería, D.; Herbert, C.; Pablos, M.; Golkar, A.; Gutiérrrez, A.; et al. FSSCAT Mission Description and First Scientific Results of the FMPL-2 Onboard 3Cat-5/A. In Proceedings of the IGARSS 2021—2021 IEEE International Geoscience and Remote Sensing Symposium, Brussels, Belgium, 12–16 July 2021. submitted. [Google Scholar]
- Munoz-Martin, J.F.; Capon, L.F.; Ruiz-de-Azua, J.A.; Camps, A. The Flexible Microwave Payload-2: A SDR-Based GNSS-Reflectometer and L-Band Radiometer for CubeSats. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1298–1311. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Fernandez, L.; Perez, A.; Ruiz-de-Azua, J.A.; Park, H.; Camps, A.; Domínguez, B.C.; Pastena, M. In-Orbit Validation of the FMPL-2 Instrument—The GNSS-R and L-Band Microwave Radiometer Payload of the FSSCat Mission. Remote Sens. 2021, 13, 121. [Google Scholar] [CrossRef]
- Esposito, M.; Vercruyssen, N.; Dijk, C.; Domíguez, B.C.; Pastena, M.; Martimort, P.; Silvestrin, P. HyperScout 2 Highly integration of hyperspectral and thermal infrared technologies for a miniaturized EO imager. Living Planet Symp. 2019. [Google Scholar] [CrossRef]
- EUMETSAT OSI SAF. Ocean and Sea Ice. Available online: http://www.osi-saf.org/ (accessed on 22 December 2020).
- Didan, K. “MOD13Q1 MODIS/Terra Vegetation Indices 16-Day L3 Global 250m SIN Grid V006”, NASA EOSDIS Land Processes DAAC. 2015. Available online: https://lpdaac.usgs.gov/products/mod13q1v006/ (accessed on 24 December 2020).
- Owens, R.; Hewson, T. ECMWF Forecast User Guide; ECMWF: Reading, UK, 2018; Available online: https://www.ecmwf.int/node/16559 (accessed on 24 December 2020).
- Brodzik, M.J.; Billingsley, B.; Haran, T.; Raup, B.; Savoie, M.H. EASE-Grid 2.0: Incremental but Significant Improvements for Earth-Gridded Data Sets. ISPRS Int. J. Geo-Inf. 2012, 1, 32–45. [Google Scholar] [CrossRef] [Green Version]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote Sensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. 2014, 2, 8–45. [Google Scholar] [CrossRef] [Green Version]
- Munoz-Martin, J.F.; Perez, A.; Camps, A.; Ribó, S.; Cardellach, E.; Stroeve, J.; Nandan, V.; Itkin, P.; Tonboe, R.; Hendricks, S.; et al. Snow and Ice Thickness Retrievals Using GNSS-R: Preliminary Results of the MOSAiC Experiment. Remote Sens. 2020, 12, 4038. [Google Scholar] [CrossRef]
- Yan, Q.; Huang, W. Sea Ice Remote Sensing Using GNSS-R: A Review. Remote Sens. 2019, 11, 2565. [Google Scholar] [CrossRef] [Green Version]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [Green Version]
- Ying, X. An overview of overfitting and its solutions. J. Phys. Conf. Ser. 2019, 1168, 022022. [Google Scholar] [CrossRef]
- Yu, H.; Wilamowski, B. Levenberg–Marquardt Training. In Intelligent Systems; CRC Press: Boca Raton, FL, USA, 2011; pp. 1–16. [Google Scholar] [CrossRef]
- Wait, B.R.; Nokes, R.; Webster-Brown, J. Freeze-thaw dynamics and the implications for stratification and brine geochemistry in meltwater ponds on the McMurdo Ice Shelf, Antarctica. Antarct. Sci. 2009, 21, 243–254. [Google Scholar] [CrossRef]
- Zribi, M.; Motte, E.; Baghdadi, N.; Baup, F.; Dayau, S.; Fanise, P.; Guyon, D.; Huc, M.; Wigneron, J. Potential Applications of GNSS-R Observations over Agricultural Areas: Results from the GLORI Airborne Campaign. Remote Sens. 2018, 10, 1245. [Google Scholar] [CrossRef] [Green Version]
- Meier, W.; Stewart, J. Assessing uncertainties in sea ice extent climate indicators. Environ. Res. Lett. 2018, 14, 035005. [Google Scholar] [CrossRef]
- Fetterer, F.; Stewart, J.S.; Meier, W.N. MASAM2: Daily 4 km Arctic Sea Ice Concentration; Version 1; NSIDC, National Snow and Ice Data Center: Boulder, CO, USA, 2015. [Google Scholar] [CrossRef]
- Hall, D.K.; Riggs, G.A. MODIS/Terra Sea Ice Extent Daily L3 Global 1km EASE-Grid Day; Version 6; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2015. [Google Scholar] [CrossRef]
- Araguz, C.; Llaveria, D.; Lancheros, E.; Bou-Balust, E.; Camps, A.; Alarcón, E.; Lluch, I.; Matevosyan, H.; Golkar, A.; Tonetti, S.; et al. Optimized model-based design space exploration of distributed multi-orbit multi-platform Earth observation spacecraft architectures. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018; pp. 1–16. [Google Scholar] [CrossRef]
- Bussy-Virat, C.D.; Ruf, C.S.; Ridley, A.J. Relationship Between Temporal and Spatial Resolution for a Constellation of GNSS-R Satellites. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 16–25. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Onrubia, R.; Pascual, D.; Park, H.; Pablos, M.; Camps, A.; Rüdiger, C.; Walker, J.; Monerris, A. Single-Pass Soil Moisture Retrieval using GNSS-R at L1 and L5 bands: Results from airbone experiment. Remote Sens. 2021, 13, 797. [Google Scholar] [CrossRef]
- Krasnopolsky, M.V.; Chalikov, D.V.; Tolman, H.L. A neural network technique to improve computational efficiency of numerical oceanic models. Ocean Model. 2002, 4, 363–383. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Arctic | Antarctic | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Global | SIC > 90 | SIC = 0 | 0 < SIC < 90 | Global | SIC > 90 | SIC = 0 | 0 < SIC < 90 | ||
| SIE Error | ST | 2.12% | 0.24% | 1.52% | 10.58% | 14.30% | 9.36% | 4.52% | 34.98% |
| ST + LCF | 2.07% | 0.12% | 1.45% | 10.54% | 12.56% | 7.20% | 4.74% | 30.22% | |
| MWR | 10.61% | 1.92% | 10.13% | 32.05% | 5.19% | 0.30% | 4.58% | 10.04% | |
| MWR + LCF | 6.61% | 1.18% | 5.43% | 24.91% | 4.46% | 0.20% | 3.88% | 8.74% | |
| MWR + ST | 2.11% | 0.06% | 1.78% | 8.87% | 4.16% | 0.38% | 3.32% | 8.51% | |
| MWR + ST + LCF | 1.81% | 0.02% | 1.52% | 8.30% | 3.9% | 0.20% | 2.90% | 7.53% | |
| SIC MAE | ST | 3.18% | 4.08% | 4.08% | 14.04% | 17.02% | 14.84% | 14.84% | 25.19% |
| ST + LCF | 2.89% | 3.60% | 1.40% | 13.03% | 15.78% | 13.67% | 11.89% | 24.13% | |
| MWR | 12.08% | 10.06% | 10.88% | 25.06% | 6.90% | 6.18% | 3.67% | 13.02% | |
| MWR + LCF | 7.15% | 19.86% | 5.93% | 19.86% | 6.37% | 12.46% | 3.14% | 12.46% | |
| MWR + ST | 2.80% | 3.52% | 1.32% | 13.10% | 5.89% | 5.73% | 2.63% | 11.64% | |
| MWR + ST + LCF | 2.37% | 2.87% | 1.05% | 11.27% | 5.55% | 5.25% | 2.35% | 11.30% | |
| Box Size (Pixels) | Arctic | Antarctic | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Global | SIC > 90 | SIC = 0 | 0 < SIC < 90 | Global | SIC > 90 | SIC = 0 | 0 < SIC < 90 | ||
| SIE Error | 11 × 11 | 2.19% | 0.06% | 1.93% | 8.39% | 4.05% | 0.42% | 3.25% | 8.25% |
| 21 × 21 | 1.99% | 0.05% | 1.68% | 8.37% | 3.98% | 0.45% | 2.91% | 8.57% | |
| 51 × 51 | 2.06% | 0.04% | 1.75% | 8.56% | 4.02% | 0.33% | 3.08% | 8.53% | |
| 101 × 101 | 1.99% | 0.03% | 1.69% | 8.35% | 3.97% | 0.39% | 2.93% | 8.55% | |
| 201 × 201 | 1.95% | 0.02% | 1.52% | 8.50% | 3.57% | 0.21% | 2.90% | 7.33% | |
| 301 × 301 | 2.01% | 0.03% | 1.67% | 8.51% | 3.97% | 0.31% | 3.26% | 8.01% | |
| SIC MAE | 11 × 11 | 2.54% | 3.14% | 1.23% | 12.13% | 6.01% | 5.76% | 2.76% | 11.83% |
| 21 × 21 | 2.42% | 2.96% | 1.41% | 11.75% | 5.87% | 5.59% | 2.58% | 11.75% | |
| 51 × 51 | 2.37% | 2.80% | 1.15% | 11.50% | 6.08% | 5.66% | 2.83% | 12.03% | |
| 101 × 101 | 2.38% | 2.86% | 1.11% | 11.37% | 5.86% | 5.50% | 2.63% | 11.72% | |
| 201 × 201 | 2.37% | 2.87% | 1.05% | 11.27% | 5.55% | 5.25% | 2.35% | 11.30% | |
| 301 × 301 | 2.40% | 3.07% | 1.10% | 11.80% | 5.74% | 5.36% | 2.58% | 11.58% | |
| SIE Classification Error | SIC MAE | |||
|---|---|---|---|---|
| North | South | North | South | |
| DDM | 44.90% | 46.65% | 39.56% | 41.31% |
| ADDM | 40.74% | 42.10% | 37.77% | 39.28% |
| ADDM+ el + gamma + STD | 21.61% | 13.51% | 28.47% | 24.32% |
| ADDM + el + gamma | 26.13% | 13.42% | 31.65% | 21.64% |
| ADDM + el + SNR | 26.45% | 20.03% | 31.77% | 29.33% |
| El + gamma + STD | 22.41% | 11.77% | 27.86% | 19.67% |
| ADDM + el + gamma + STD + SNR | 14.91% | 6.68% | 22.13% | 14.69% |
| El + gamma + STD + SNR | 15.73% | 9.03% | 24.75% | 18.29% |
| SIE Classification Error | SIC MAE | |||
|---|---|---|---|---|
| North | South | North | South | |
| GNSS-R | 14.91% | 6.68% | 22.13% | 14.69% |
| GNSS-R + MWR | 4.07% | 1.60% | 10.48% | 3.79% |
| GNSS-R + MWR + LCF | 2.36% | 1.21% | 6.94% | 3.44% |
| MWR | 18.04% | 6.42% | 16.85% | 8.14% |
| MWR + LCF | 7.65% | 2.59% | 10.19% | 4.86% |
| ST | 3.44% | 40.38% | 5.41% | 38.09% |
| ST + LCF | 2.51% | 20.64% | 4.62% | 25.74% |
| MWR + ST | 2.20% | 3.34% | 4.54% | 6.63% |
| MWR + ST + LCF | 1.49% | 1.85% | 3.34% | 3.31% |
| GNSS-R + MWR + LC + ST | 1.10% | 1.00% | 2.81% | 2.29% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Llaveria, D.; Munoz-Martin, J.F.; Herbert, C.; Pablos, M.; Park, H.; Camps, A. Sea Ice Concentration and Sea Ice Extent Mapping with L-Band Microwave Radiometry and GNSS-R Data from the FFSCat Mission Using Neural Networks. Remote Sens. 2021, 13, 1139. https://doi.org/10.3390/rs13061139
Llaveria D, Munoz-Martin JF, Herbert C, Pablos M, Park H, Camps A. Sea Ice Concentration and Sea Ice Extent Mapping with L-Band Microwave Radiometry and GNSS-R Data from the FFSCat Mission Using Neural Networks. Remote Sensing. 2021; 13(6):1139. https://doi.org/10.3390/rs13061139
Chicago/Turabian StyleLlaveria, David, Juan Francesc Munoz-Martin, Christoph Herbert, Miriam Pablos, Hyuk Park, and Adriano Camps. 2021. "Sea Ice Concentration and Sea Ice Extent Mapping with L-Band Microwave Radiometry and GNSS-R Data from the FFSCat Mission Using Neural Networks" Remote Sensing 13, no. 6: 1139. https://doi.org/10.3390/rs13061139
APA StyleLlaveria, D., Munoz-Martin, J. F., Herbert, C., Pablos, M., Park, H., & Camps, A. (2021). Sea Ice Concentration and Sea Ice Extent Mapping with L-Band Microwave Radiometry and GNSS-R Data from the FFSCat Mission Using Neural Networks. Remote Sensing, 13(6), 1139. https://doi.org/10.3390/rs13061139