
Rapid Mapping of Large-Scale Greenhouse Based on Integrated Learning Algorithm and Google Earth Engine

 , , and
, , and
Abstract
:1. Introduction
2. Research Data and Methods
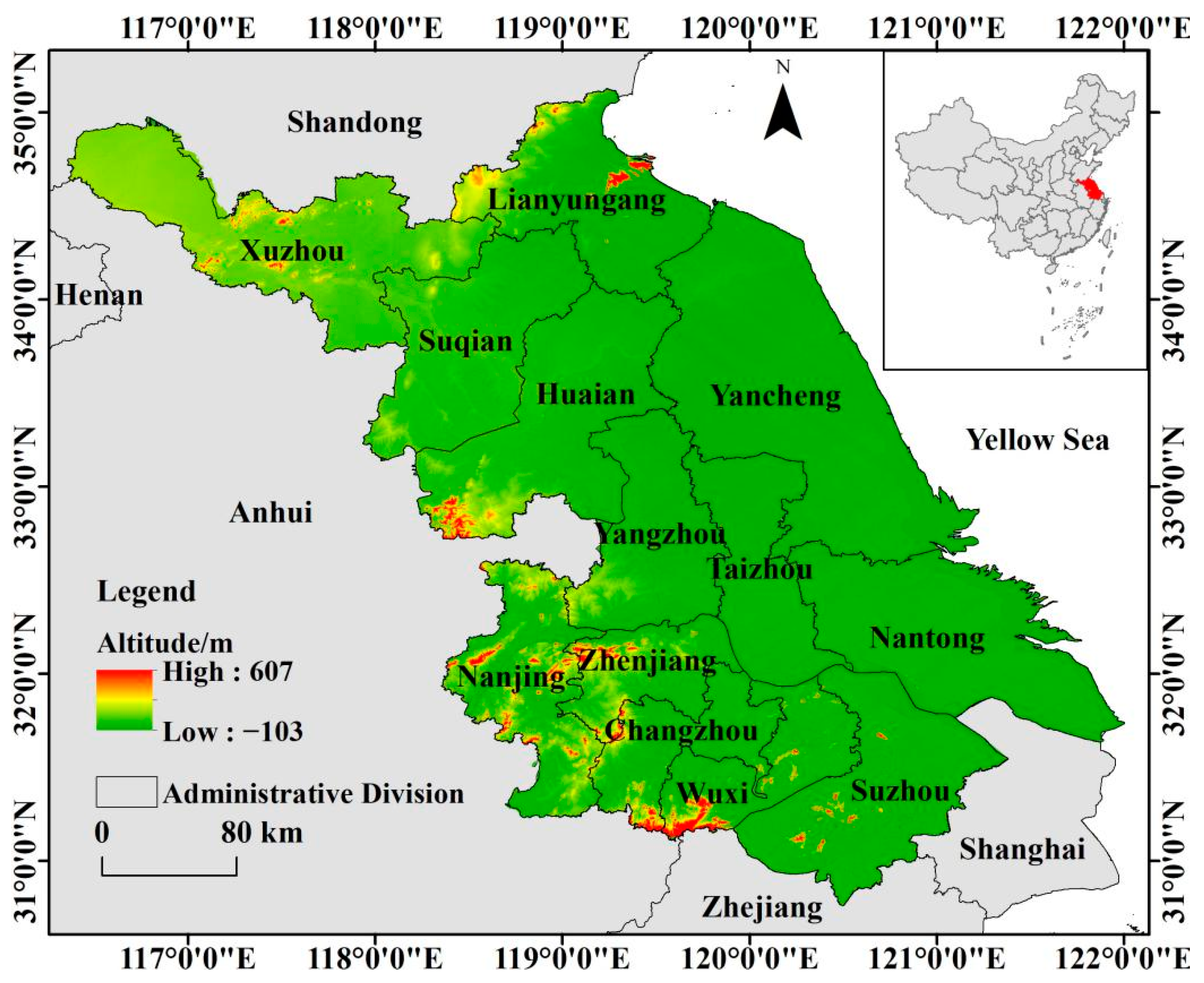
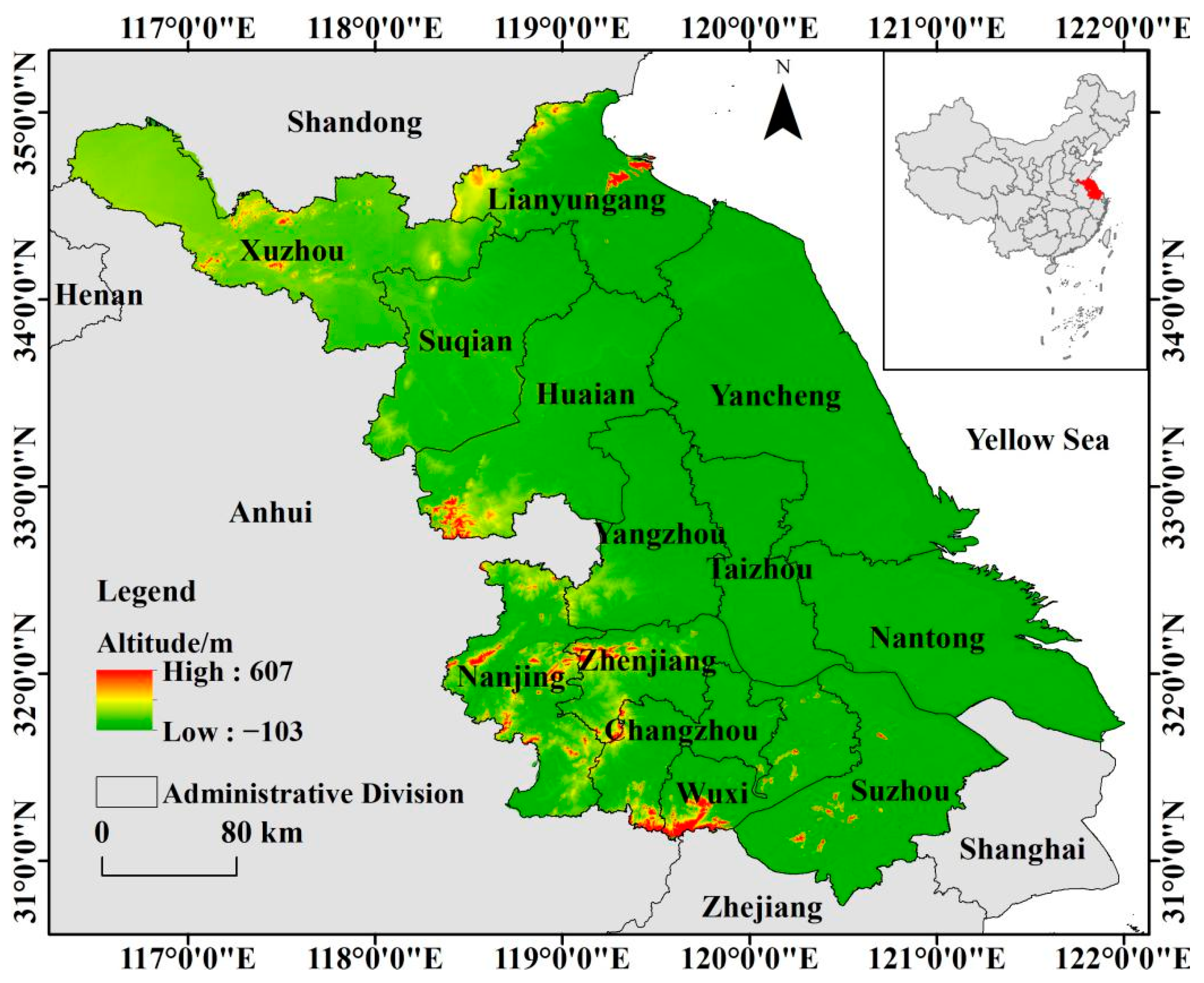
2.1. Study Area
2.2. Data Source
2.3. Feature Construction
2.3.1. Spectral Features
2.3.2. Texture Features
2.3.3. Topographic Features
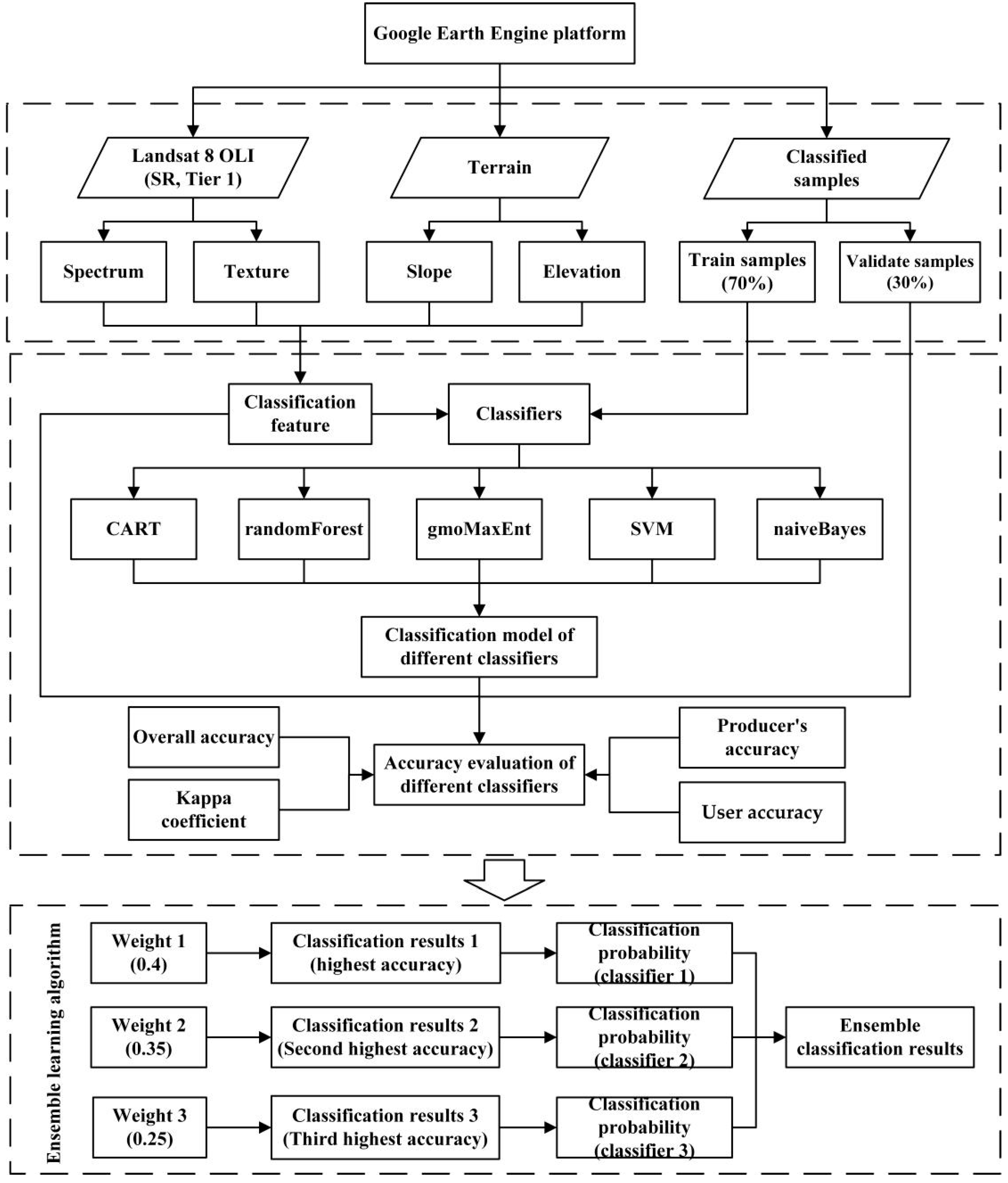
2.4. Integrated Learning Algorithm
2.5. Accuracy Accessment
3. Results
3.1. Recognition Accuracy of Each Classifier
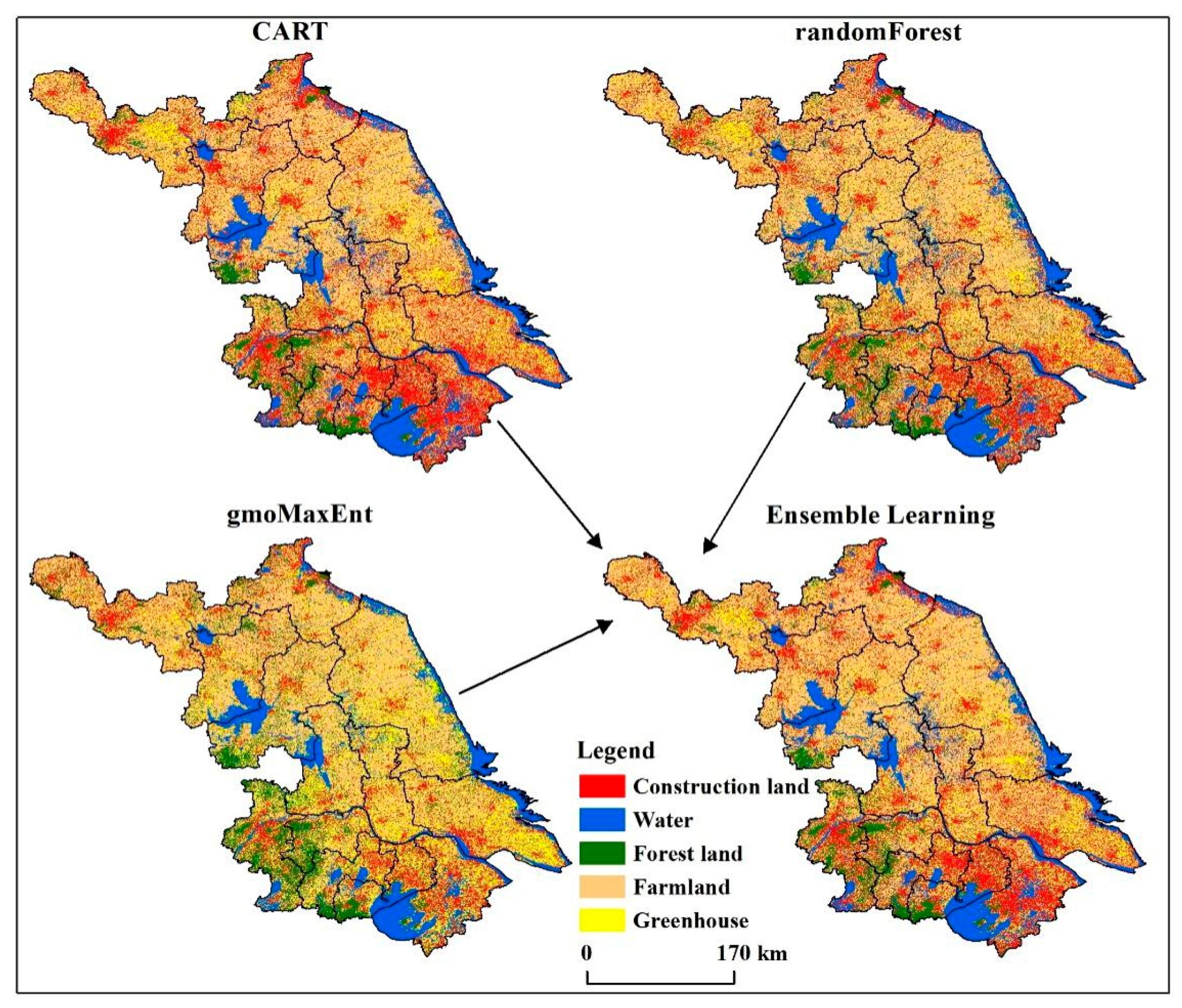
3.2. Greenhouse Extraction of Integrated Learning Algorithm
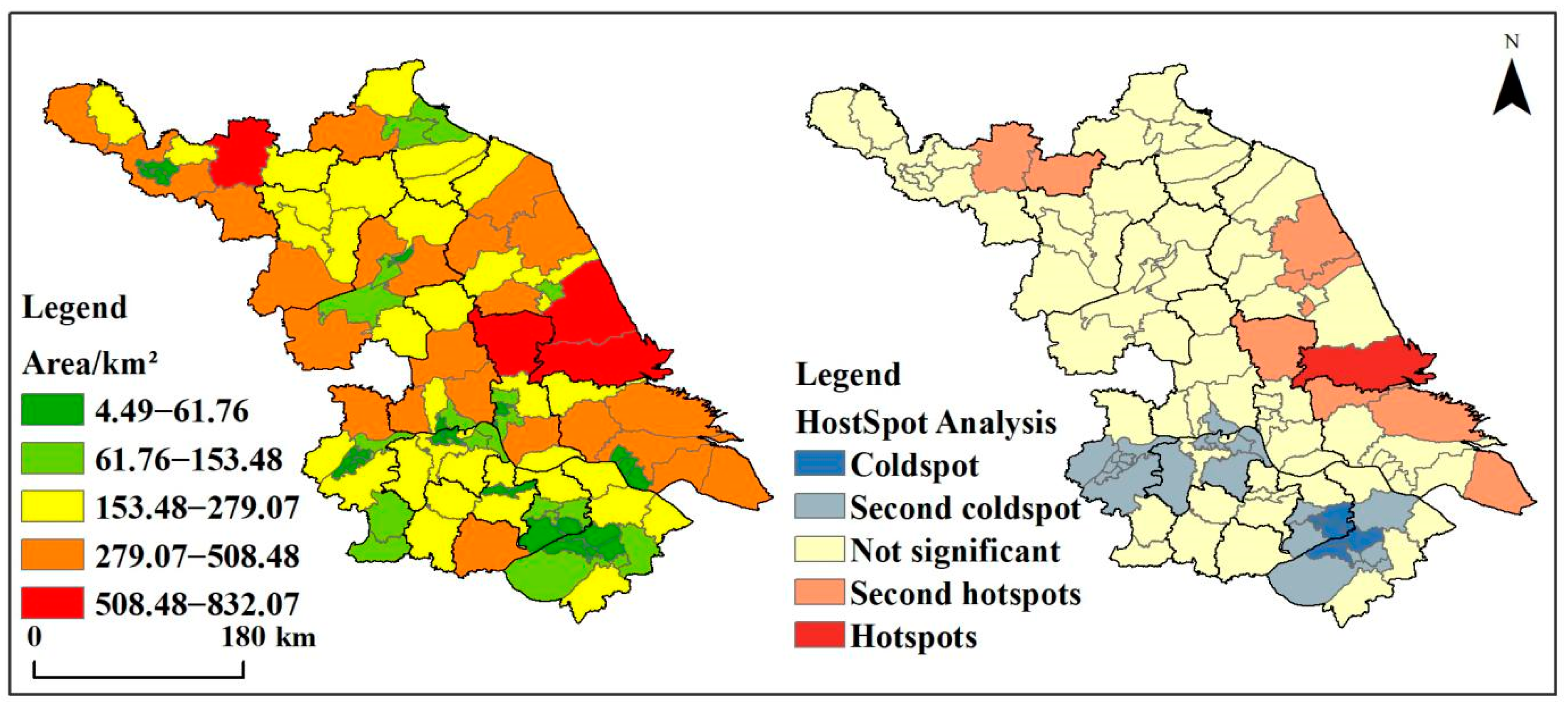
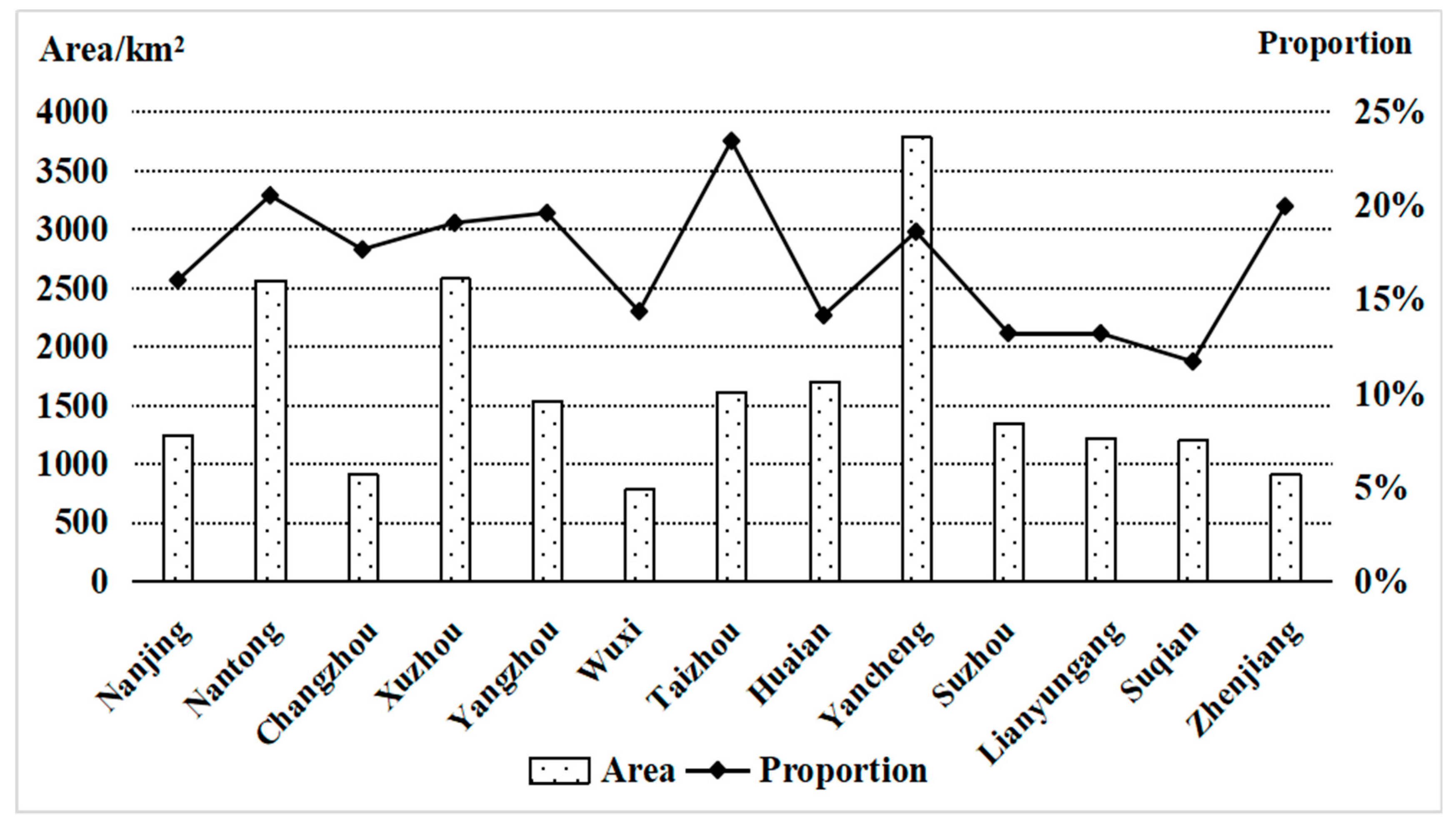
3.3. Spatial Distribution Characteristics of Greenhouses
4. Discussion
4.1. Classification Accuracy under Different Feature Combinations
4.2. Comparison with Other Greenhouse Extraction Algorithms
4.3. Limitations and Outlook
5. Conclusions
- (1)
- The CART, SVM, and randomForest with higher accuracy are selected to build an integrated classification algorithm of greenhouse identification. The accuracy of the integrated classification algorithm is higher than any single classification algorithm.
- (2)
- The greenhouses have significant spatial differentiation characteristics. The most widely distributed greenhouses are mainly concentrated in developed agricultural areas, and greenhouses have obvious spatial agglomeration characteristics. The hot spots are mainly concentrated in the east and north of the study area.
- (3)
- Different combinations of spectral, texture and terrain features have a greater impact on the extraction of regional greenhouses. Among them, the extraction accuracy of greenhouses under the combination of spectral, texture and terrain features is the highest. Spectral features are the key factors of greenhouse interpretation.
- (4)
- The Google Earth Engine cloud platform provides a large amount of various open source remote-sensing data, and comes with various classification algorithms. An integrated classifier for regional greenhouse recognition was constructed, which can realize efficient remote-sensing mapping of large-scale greenhouses in complex terrain.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Z.; Wang, L.; Wu, W.; Jiang, Z.; Li, H. Monitoring plastic-mulched farmland by Landsat-8 OLI imagery using spectral and textural features. Remote Sens. 2016, 8, 353. [Google Scholar]
- Briassoulis, D.; Dougka, G.; Dimakogianni, D.; Vayas, I. Analysis of the collapse of a greenhouse with vaulted roof. Biosyst. Eng. 2016, 151, 495–509. [Google Scholar] [CrossRef]
- Picuno, P.; Tortora, A.; Capobianco, R.L. Analysis of plasticulture landscapes in Southern Italy through remote sensing and solid modelling techniques. Landsc. Urban Plan. 2011, 100, 45–56. [Google Scholar] [CrossRef]
- Levin, N.; Lugassi, R.; Ramon, U.; Braun, O.; Ben-Dor, E. Remote sensing as a tool for monitoring plasticulture in agricultural landscapes. Int. J. Remote Sens. 2007, 28, 183–202. [Google Scholar] [CrossRef]
- Picuno, P.; Sica, C.; Laviano, R.; Dimitrijevic’c, A.; Scarascia-Mugnozza, G. Experimental tests and technical characteristics of regenerated films from agricultural plastics. Polym. Degrad. Stab. 2012, 97, 1654–1661. [Google Scholar] [CrossRef]
- National Bureau Statistics. Bulletin of Main Data of the Third National Agricultural Census. 2017. Available online: http://www.stats.gov.cn/tjsj/tjgb/nypcgb/qgnypcgb/201712/t20171215_1563539.html (accessed on 15 December 2017).
- Aguilar, M.; Vallario, A.; Aguilar, F.; Lorca, A.; Parente, C. Object-based greenhouse horticultural crop identification from multi-temporal satellite imagery: A case study in almeria, spain. Remote Sens. 2015, 7, 7378–7401. [Google Scholar] [CrossRef] [Green Version]
- Lanorte, A.; De Santis, F.; Nolè, G.; Blanco, I.; Loisi, R.V.; Schettini, E.; Vox, G. Agricultural plastic waste spatial estimation by Landsat 8 satellite images. Comput. Electron. Agric. 2017, 141, 35–45. [Google Scholar] [CrossRef]
- Yang, D.; Chen, J.; Zhou, Y.; Chen, X.; Chen, X.; Cao, X. Mapping plastic greenhouse with medium spatial resolution satellite data: Development of a new spectral index. ISPRS J. Photogramm. Remote Sens. 2017, 128, 47–60. [Google Scholar] [CrossRef]
- Wu, J.Y.; Liu, X.L.; Bo, Y.C.; Shi, Z.T.; Fu, Z. Plastic greenhouse recognition based on GF-2 data and multi-texture features. Trans. CSAE 2019, 35, 173–183. [Google Scholar]
- Aguilar, M.A.; Bianconi, F.; Aguilar, F.J.; Fernández, I. Object-based greenhouse classification from GeoEye-1 and WorldView-2 stereo imagery. Remote Sens. 2014, 6, 3554–3582. [Google Scholar] [CrossRef] [Green Version]
- Aguilar, M.Á.; Jiménez-Lao, R.; Nemmaoui, A.; Aguilar, F.J.; Koc-San, D.; Tarantino, E.; Chourak, M. Evaluation of the Consistency of Simultaneously Acquired Sentinel-2 and Landsat 8 Imagery on Plastic Covered Greenhouses. Remote Sens. 2020, 12, 2015. [Google Scholar] [CrossRef]
- Koc-San, D. Evaluation of different classifification techniques for the detection of glass and plastic greenhouses from WorldView-2 satellite imagery. J. Appl. Remote Sens. 2013, 7, 073553. [Google Scholar] [CrossRef]
- Shi, L.; Huang, X.; Zhong, T.; Taubenbck, H. Mapping Plastic Greenhouses Using Spectral Metrics Derived from GaoFen-2 Satellite Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 49–59. [Google Scholar] [CrossRef]
- Agüera, F.; Aguilar, F.J.; Aguilar, M.A. Using texture analysis to improve perpixel classification of very high resolution images for mapping plastic greenhouses. ISPRS J. Photogramm. Remote Sens. 2008, 63, 635–646. [Google Scholar] [CrossRef]
- Wu, C.F.; Deng, J.S.; Wang, K.; Ma, L.G.; Tahmassebi, A.R. Object-based classification approach for greenhouse mapping using Landsat-8 imagery. Int. J. Agric. Biol. Eng. 2016, 9, 79–88. [Google Scholar]
- Chen, J.; Shen, R.P.; Li, B.L.; Di, P.C.; Yan, X.Y.; Zhou, M.Y.; Wang, S.W. The development of plastic greenhouse index based on Logistic regression analysis. Remote Sens. Land Resour. 2019, 31, 43–50. [Google Scholar]
- Shelestov, A.; Lavreniuk, M.; Kussul, N.; Novikov, A.; Skakun, S. Exploring google earth engine platform for big data processing: Classification of multi-temporal satellite imagery for cop mapping. Front. Earth Sci. 2017, 5, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google earth engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Dong, J.W.; Xiao, X.M.; Menarguez, M.A.; Zhang, G.L.; Qin, Y.W.; Thau, D.; Biradar, C.; Berrien, M. Mapping paddy rice planting area in northeastern Asia with Landsat 8 images, phenology-based algorithm and google earth engine. Remote Sens. Environ. 2016, 185, 142–154. [Google Scholar] [CrossRef] [Green Version]
- Xiong, J.; Thenkabail, P.S.; Gumma, M.K.; Teluguntla, P.; Poehnelt, J.; Congalton, R.G.; Yadav, K.; Thau, D. Automated cropland mapping of continental Africa using google earth engine cloud computing. ISPRS J. Photogramm. Remote Sens. 2017, 126, 225–244. [Google Scholar] [CrossRef] [Green Version]
- Aguilar, R.; Zurita-Milla, R.; Izquierdo-Verdiguier, E.; de By, R.A. A cloud-based multi-temporal ensemble classifier to map smallholder farming systems. Remote Sens. 2018, 10, 729. [Google Scholar] [CrossRef] [Green Version]
- He, Z.X.; Zhang, M.; Wu, B.F.; Xing, Q. Extraction of summer crop in Jiangsu based on Google Earth Engine. J. Geo-Inf. Sci. 2019, 21, 752–766. [Google Scholar]
- Jia, K.; Li, Q.Z. Review of features selection in crop classification using remote sensing data. Resour. Sci. 2013, 35, 2507–2516. [Google Scholar]
- Liu, G.; Zhang, L.; Zhang, Q.; Musyimi, Z.; Jiang, Q. Spatio-temporal dynamics of wetland landscape patterns based on remote sensing in yellow river delta, China. Wetlands 2014, 34, 787–801. [Google Scholar] [CrossRef]
- Pei, H.; Sun, T.J.; Wang, X.Y. Object-oriented land use/cover classification based on texture features of Landsat 8 OLI image. Trans. Chin. Soc. Agric. Eng. 2018, 34, 248–255. [Google Scholar]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B. Texture feature extraction analysis of remote sensing image based on gray level co-occurrence matrix. Cult. Geogr. 2017, 22, 190–200. [Google Scholar]
- Breiman, L.; Friedman, J.H.; Olshen, R. Classification and regression trees. Encycl. Ecol. 1984, 40, 582–588. [Google Scholar]
- Alimjan, G.; Sun, T.; Liang, Y.; Jumahun, H.; Guan, Y. A new technique for remote sensing image classification based on combinatorial algorithm of svm and knn. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1–23. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Feng, Q.; Liu, J.; Gong, J. Uav remote sensing for urban vegetation mapping using random forest and texture analysis. Remote Sens. 2015, 7, 1074–1094. [Google Scholar] [CrossRef] [Green Version]
- Bruzzone, L. An approach to feature selection and classification of remote sensing images based on the bayes rule for minimum cost. IEEE Trans. Geosci. Remote Sens. 2000, 38, 429–438. [Google Scholar] [CrossRef]
- Chen, S.J.; Li, G.L.; Zhang, W.; Cao, W. Land use classification in coal mining area using remote sensing images based on multiple classifier combination. J. China Univ. Min. Technol. 2011, 40, 273–278. [Google Scholar]
- Huang, D.; Xu, S.; Sun, J.; Liang, S.; Wang, Z. Accuracy assessment model for classification result of remote sensing image based on spatial sampling. J. Appl. Remote Sens. 2017, 11, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.H.; Liu, Y.M.; Feng, Q.L.; Ou, C.; Guo, H.; Liu, J.T. Spatial-temporal dynamic changes of agricultural greenhouses in Shandong Province in recent 30 years based on Google Earth Engine. Trans. Chin. Soc. Agric. Mach. 2020, 51, 168–175. [Google Scholar]
- Zhao, L.; Ren, H.Y.; Yang, L.S. Retrievalof Agriculture Greenhouse based on GF-2 Remote Sensing Images. Remote Sens. Technol. Appl. 2019, 34, 677–684. [Google Scholar]
- Aguilar, M.; Nemmaoui, A.; Novelli, A.; Aguilar, F.; García Lorca, A. Object-based greenhouse mapping using very high resolution satellite data and Landsat 8 time series. Remote Sens. 2016, 8, 513. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type Code | Land Class Name | Number of Samples | Features | Index Connotation |
|---|---|---|---|---|
| 1 | Construction land | 2307 |  | It is the main carrier of human urban construction, and is generally divided into urban construction land, rural residential areas and other construction land. |
| 2 | Water | 2277 |  | Refers to land used for natural terrestrial waters and water conservancy facilities, mainly including oceans, rivers, lakes, tidal flats, reservoirs and pits. |
| 3 | Forest land | 2554 |  | Forestry land with a canopy density of more than 0.4, which mainly includes arbor forest land, sparse forest land, shrub forest land, etc. |
| 4 | Farmland | 2408 |  | Land used for agricultural production, including paddy fields, dry lands, irrigated lands, garden lands, etc. |
| 5 | Greenhouse | 3290 |  | Agricultural facilities that provide a good growth environment for crop growth. |
| Total | 12836 |
| Feature Selection | Index Selection | Index Connotation | Resolution |
|---|---|---|---|
| Spectral feature | Band 1 | Coastal | 30 m |
| Band 2 | Blue | 30 m | |
| Band 3 | Green | 30 m | |
| Band 4 | Red | 30 m | |
| Band 5 | Near Infrared (NIR) | 30 m | |
| Band 6 | Short Wave Infrared 1 (SWIR 1) | 30 m | |
| Band 7 | Short Wave Infrared 2 (SWIR 2) | 30 m | |
| NDVI | Normalized Difference Vegetation Index | 30 m | |
| NDBI | Normalized Difference Build-up Index | 30 m | |
| NDWI | Normalized Difference Water Index | 30 m | |
| Texture feature | B2_asm | Angular Second Moment | 30 m |
| B2_contrast | Contrast | 30 m | |
| B2_corr | Correlation | 30 m | |
| B2_var | Variance | 30 m | |
| B2_idm | Inverse Difference Moment | 30 m | |
| B2_ent | Entropy | 30 m | |
| Terrain feature | Slope | Degree of steepness and slowness of surface unit | 30 m |
| Elevation | Altitude, distance from sea level | 30 m |
| Land Use Type | CART | randomForest | gmoMaxEnt | SVM | naiveBayes | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| UA | PA | UA | PA | UA | PA | UA | PA | UA | PA | |
| Construction land | 0.88 | 0.80 | 0.80 | 0.80 | 0.77 | 0.83 | 0.56 | 0.34 | 0.46 | 0.61 |
| Water | 0.96 | 0.97 | 0.96 | 0.95 | 0.97 | 0.96 | 0.43 | 0.97 | 0.89 | 0.99 |
| Forest land | 0.94 | 0.95 | 0.91 | 0.93 | 0.91 | 0.92 | 0.95 | 0.98 | 0.19 | 0.50 |
| Farmland | 0.79 | 0.89 | 0.78 | 0.81 | 0.70 | 0.88 | 0.94 | 0.48 | 0.84 | 0.36 |
| Greenhouse | 0.92 | 0.88 | 0.86 | 0.83 | 0.89 | 0.73 | 0.08 | 0.41 | 0.31 | 0.43 |
| Confusion Matrix | Actual Value | ||||||
|---|---|---|---|---|---|---|---|
| Construction Land | Water | Forest Land | Farmland | Greenhouse | User’s Accuracy | ||
| Predictive Value | Construction land | 593 | 4 | 16 | 64 | 33 | 0.84 |
| Water | 3 | 659 | 5 | 11 | 3 | 0.97 | |
| Forest land | 8 | 5 | 758 | 12 | 2 | 0.97 | |
| Farmland | 17 | 3 | 9 | 624 | 18 | 0.93 | |
| Greenhouse | 71 | 5 | 13 | 38 | 927 | 0.88 | |
| Producer’s accuracy | 0.86 | 0.97 | 0.95 | 0.83 | 0.94 | ||
| Evaluation of Accuracy | Feature Combinations | ||||||
|---|---|---|---|---|---|---|---|
| Spectral | Texture | Terrain | Spectral + Texture | Spectral + Terrain | Texture + Terrain | Spectral + Texture + Terrain | |
| Overall accuracy | 0.87 | 0.42 | 0.60 | 0.88 | 0.89 | 0.69 | 0.90 |
| Kappa coefficient | 0.84 | 0.27 | 0.49 | 0.85 | 0.86 | 0.61 | 0.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.; Jin, X.; Ren, J.; Liu, J.; Liang, X.; Zhou, Y. Rapid Mapping of Large-Scale Greenhouse Based on Integrated Learning Algorithm and Google Earth Engine. Remote Sens. 2021, 13, 1245. https://doi.org/10.3390/rs13071245
Lin J, Jin X, Ren J, Liu J, Liang X, Zhou Y. Rapid Mapping of Large-Scale Greenhouse Based on Integrated Learning Algorithm and Google Earth Engine. Remote Sensing. 2021; 13(7):1245. https://doi.org/10.3390/rs13071245
Chicago/Turabian StyleLin, Jinhuang, Xiaobin Jin, Jie Ren, Jingping Liu, Xinyuan Liang, and Yinkang Zhou. 2021. "Rapid Mapping of Large-Scale Greenhouse Based on Integrated Learning Algorithm and Google Earth Engine" Remote Sensing 13, no. 7: 1245. https://doi.org/10.3390/rs13071245
APA StyleLin, J., Jin, X., Ren, J., Liu, J., Liang, X., & Zhou, Y. (2021). Rapid Mapping of Large-Scale Greenhouse Based on Integrated Learning Algorithm and Google Earth Engine. Remote Sensing, 13(7), 1245. https://doi.org/10.3390/rs13071245