
Small Unmanned Aircraft (sUAS)-Deployed Thermal Infrared (TIR) Imaging for Environmental Surveys with Implications in Submarine Groundwater Discharge (SGD): Methods, Challenges, and Novel Opportunities



Abstract
:
1. Introduction
2. Background and Theory
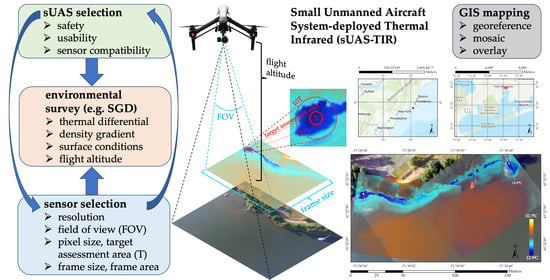
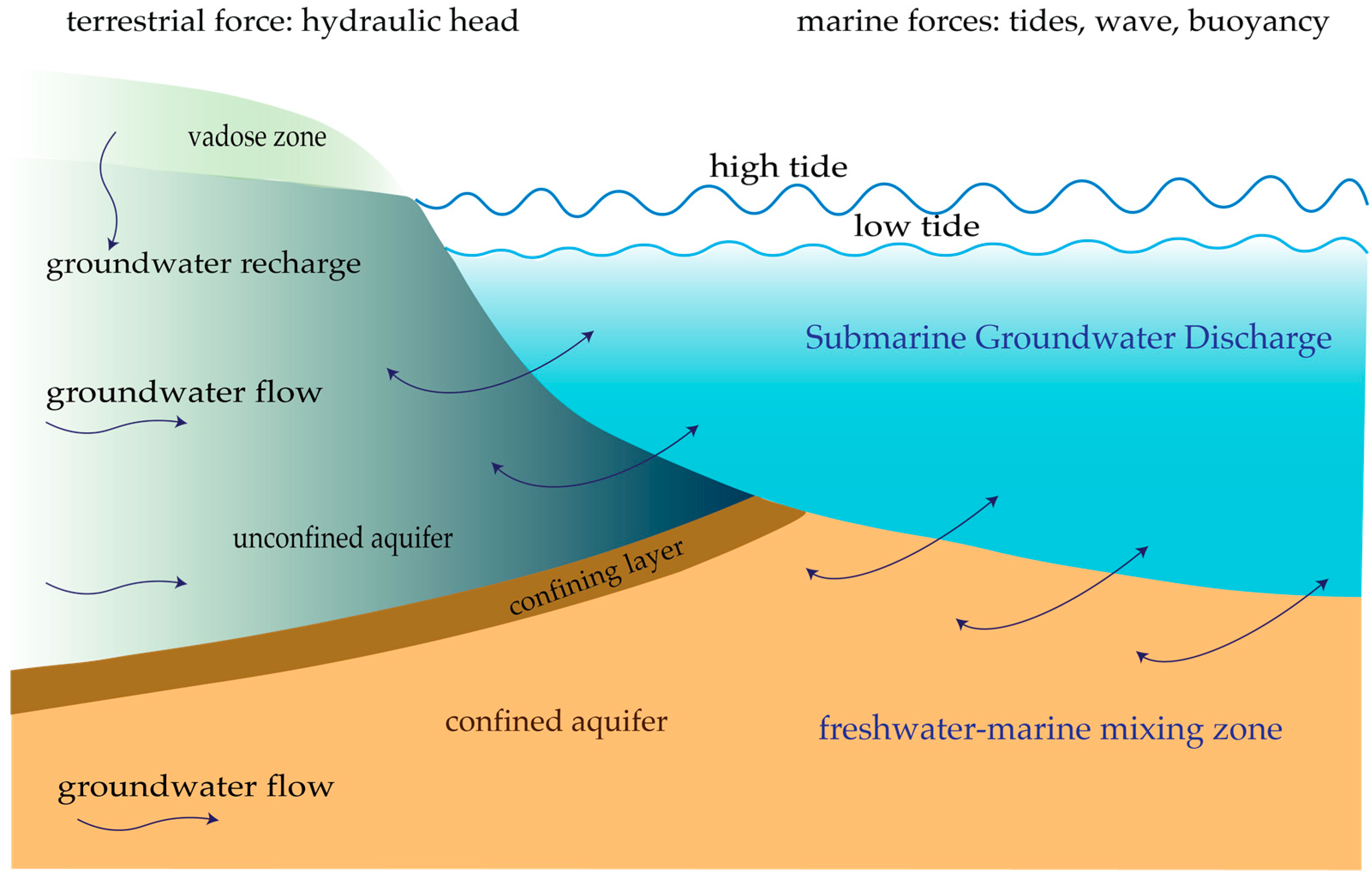
2.1. Assessing SGD via sUAS-TIR
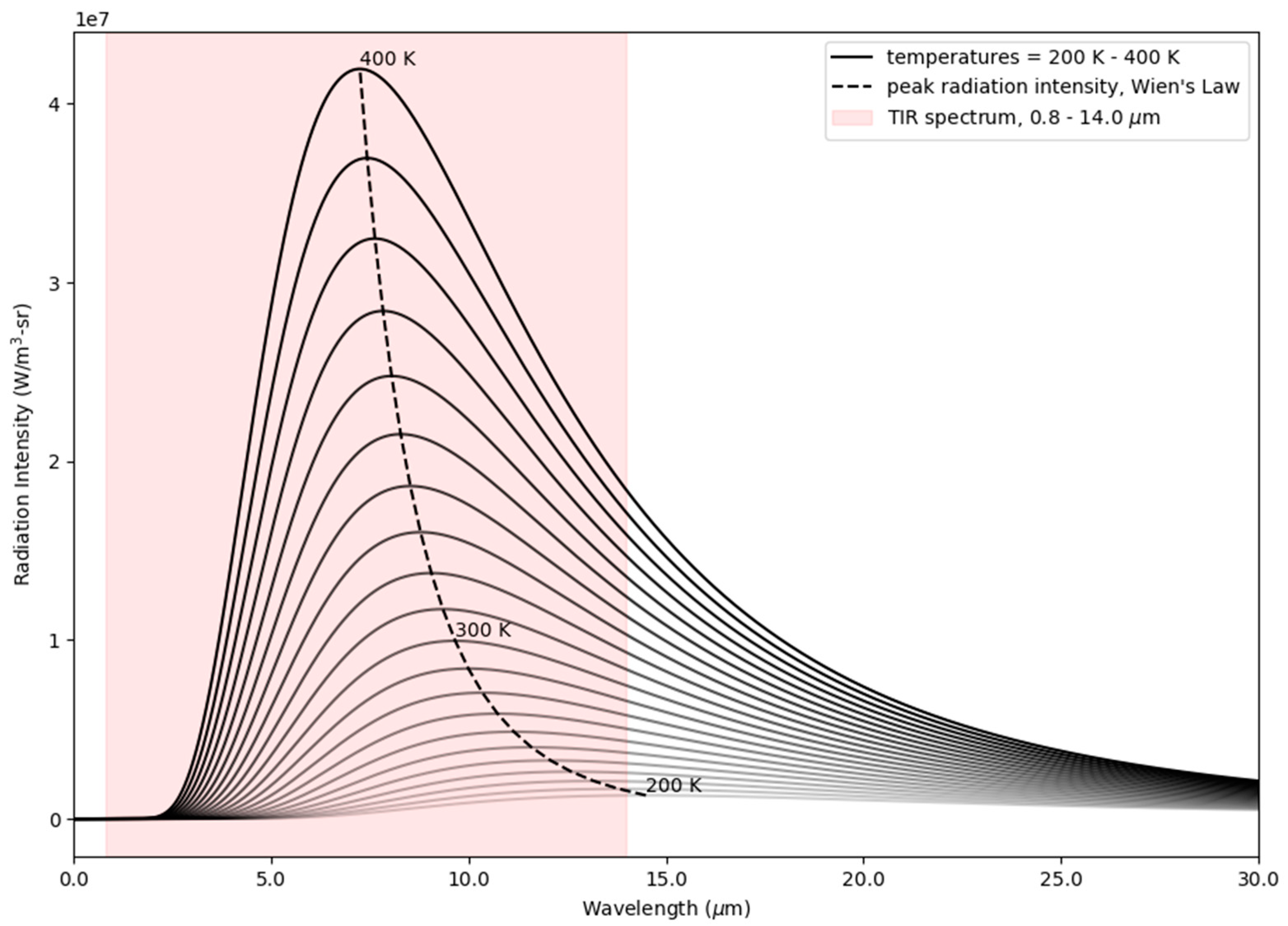
2.2. TIR Theory
3. Proposed Methodologies
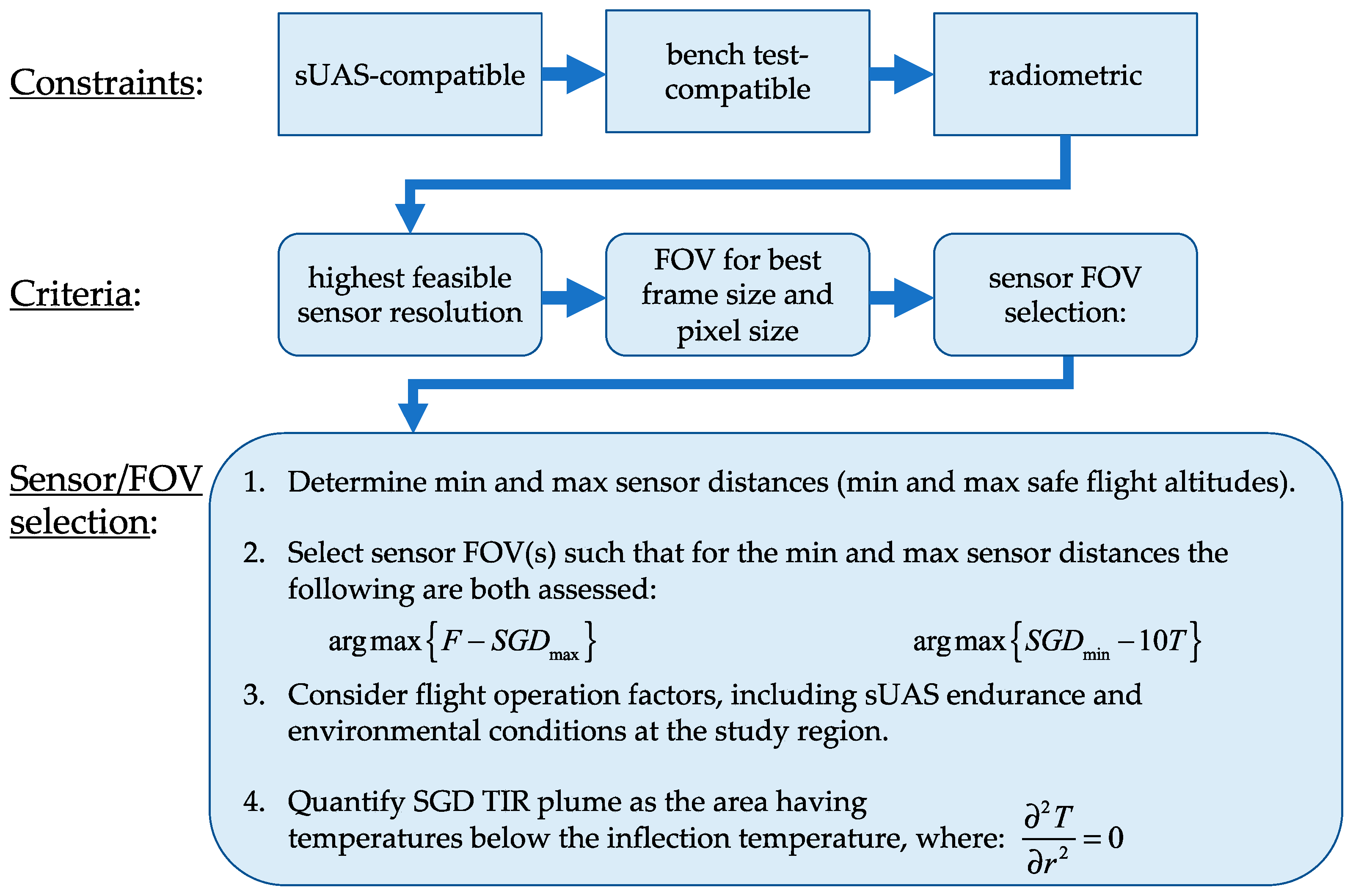
3.1. sUAS-TIR Program Development and System Selection
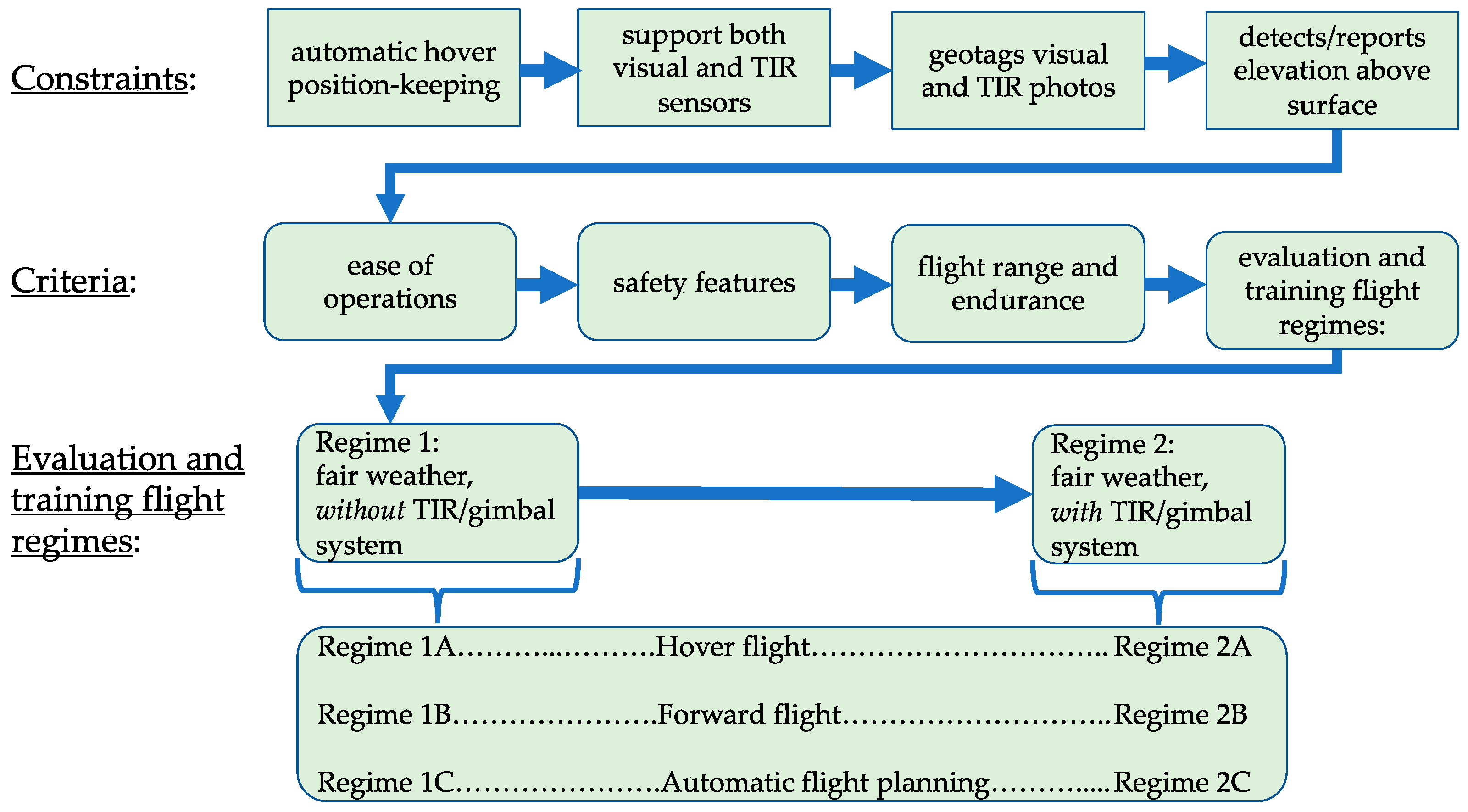
3.1.1. sUAS-TIR System Constraints
3.1.2. sUAS-TIR System Criteria
3.1.3. sUAS-TIR Evaluation and Training
3.2. TIR Specifications and Selection Criteria
3.2.1. TIR Sensor Constraints
3.2.2. TIR Sensor Criteria
3.2.3. TIR Resolution and FOV
3.2.4. Sensor FOV Selection Criteria
3.2.5. Environmental Considerations
3.3. Quantifying SGD TIR Plume Areas
3.4. SGD TIR Plume Examples Using sUAS-TIR
4. Applications and Opportunities
4.1. Airborne TIR SGD Studies
4.2. sUAS-TIR SGD Research Opportunities
4.2.1. Coastal Estuaries
4.2.2. Total and Fresh SGD vs. TIR Plume Area Regressions
4.2.3. Hydrogeologic Controls
4.2.4. Temporal Dynamics
4.2.5. Solving for Fresh SGD Flux Using the Dupuit-Ghyben-Herzberg Model
- An, SGD TIR plume area
- Ln, SGD TIR plume coastline length
- G, fresh and saltwater densities (Equation (16)),
- hn, water table height (h), and
- xn, distance of water table or fresh-saltwater interface measurement from shoreline.
4.2.6. Climate Change
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Burnett, W.C.; Bokuniewicz, H.; Huettel, M.; Moore, W.S.; Taniguchi, M. Groundwater and pore water inputs to the coastal zone. Biogeochemistry 2003, 66, 3–33. [Google Scholar] [CrossRef]
- Burnett, W.; Aggarwal, P.; Aureli, A.; Bokuniewicz, H.; Cable, J.; Charette, M.; Kontar, E.; Krupa, S.; Kulkarni, K.; Loveless, A.; et al. Quantifying submarine groundwater discharge in the coastal zone via multiple methods. Sci. Total. Environ. 2006, 367, 498–543. [Google Scholar] [CrossRef]
- Tovar-Sánchez, A.; Basterretxea, G.; Rodellas, V.; Sánchez-Quiles, D.; García-Orellana, J.; Masqué, P.; Jordi, A.; López, J.M.; Garcia-Solsona, E. Contribution of Groundwater Discharge to the Coastal Dissolved Nutrients and Trace Metal Concentrations in Majorca Island: Karstic vs Detrital Systems. Environ. Sci. Technol. 2014, 48, 11819–11827. [Google Scholar] [CrossRef] [Green Version]
- Oberdorfer, J.A. Hydrogeologic Modeling of Submarine Groundwater Discharge: Comparison to Other Quantitative Methods. Biogeochemistry 2003, 66, 159–169. [Google Scholar] [CrossRef]
- Church, T.M. An underground route for the water cycle. Nat. Cell Biol. 1996, 380, 579–580. [Google Scholar] [CrossRef]
- Kwon, E.Y.; Kim, G.; Primeau, F.; Moore, W.S.; Cho, H.; Devries, T.; Sarmiento, J.L.; Charette, M.A.; Cho, Y. Global estimate of submarine groundwater discharge based on an observationally constrained radium isotope model. Geophys. Res. Lett. 2014, 41, 8438–8444. [Google Scholar] [CrossRef]
- Taniguchi, M.; Burnett, W.C.; Cable, J.E.; Turner, J.V. Investigation of submarine groundwater discharge. Hydrol. Process. 2002, 16, 2115–2129. [Google Scholar] [CrossRef]
- Sawyer, A.H.; David, C.H.; Famiglietti, J.S. Continental patterns of submarine groundwater discharge reveal coastal vulnerabilities. Science 2016, 353, 705–707. [Google Scholar] [CrossRef] [Green Version]
- Knee, K.L.; Street, J.H.; Grossman, E.E.; Boehm, A.B.; Paytan, A. Nutrient inputs to the coastal ocean from submarine groundwater discharge in a groundwater-dominated system: Relation to land use (Kona coast, Hawaii, U.S.A.). Limnol. Oceanogr. 2010, 55, 1105–1122. [Google Scholar] [CrossRef] [Green Version]
- Dulaiova, H.; Camilli, R.; Henderson, P.B.; Charette, M.A. Coupled radon, methane and nitrate sensors for large-scale assessment of groundwater discharge and non-point source pollution to coastal waters. J. Environ. Radioact. 2010, 101, 553–563. [Google Scholar] [CrossRef]
- Moore, W.S. The Effect of Submarine Groundwater Discharge on the Ocean. Annu. Rev. Mar. Sci. 2010, 2, 59–88. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michael, H.A.; Mulligan, A.E.; Harvey, C.F. Seasonal oscillations in water exchange between aquifers and the coastal ocean. Nat. Cell Biol. 2005, 436, 1145–1148. [Google Scholar] [CrossRef] [PubMed]
- Michael, H.A.; Charette, M.A.; Harvey, C.F. Patterns and variability of groundwater flow and radium activity at the coast: A case study from Waquoit Bay, Massachusetts. Mar. Chem. 2011, 127, 100–114. [Google Scholar] [CrossRef]
- Prieto, C.; Destouni, G. Is submarine groundwater discharge predictable? Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Smith, L.; Zawadzki, W. A hydrogeologic model of submarine groundwater discharge: Florida intercomparison experiment. Biogeochemistry 2003, 66, 95–110. [Google Scholar] [CrossRef]
- Robinson, C.; Li, L.; Prommer, H. Tide-induced recirculation across the aquifer-ocean interface. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef] [Green Version]
- Anderson, M.P. Heat as a Ground Water Tracer. Ground Water 2005, 43, 951–968. [Google Scholar] [CrossRef] [PubMed]
- Chuvieco, E. Fundamentals of Satellite Remote Sensing: An Environmental Approach, 2nd ed.; Taylor & Francis Group: Boca Raton, FL, USA, 2016. [Google Scholar]
- Bejannin, S.; Van Beek, P.; Stieglitz, T.; Souhaut, M.; Tamborski, J. Combining airborne thermal infrared images and radium isotopes to study submarine groundwater discharge along the French Mediterranean coastline. J. Hydrol. Reg. Stud. 2017, 13, 72–90. [Google Scholar] [CrossRef]
- Lee, E.; Yoon, H.; Hyun, S.P.; Burnett, W.C.; Koh, D.; Ha, K.; Kim, D.; Kim, Y.; Kang, K. Unmanned aerial vehicles (UAVs)-based thermal infrared (TIR) mapping, a novel approach to assess groundwater discharge into the coastal zone. Limnol. Oceanogr. Methods 2016, 14, 725–735. [Google Scholar] [CrossRef]
- Lewandowski, J.; Meinikmann, K.; Ruhtz, T.; Pöschke, F.; Kirillin, G. Localization of lacustrine groundwater discharge (LGD) by airborne measurement of thermal infrared radiation. Remote Sens. Environ. 2013, 138, 119–125. [Google Scholar] [CrossRef]
- McCaul, M.; Barland, J.; Cleary, J.; Cahalane, C.; McCarthy, T.; Diamond, D. Combining Remote Temperature Sensing with in-Situ Sensing to Track Marine/Freshwater Mixing Dynamics. Sensors 2016, 16, 1402. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tamborski, J.J.; Rogers, A.D.; Bokuniewicz, H.J.; Cochran, J.K.; Young, C.R. Identification and quantification of diffuse fresh submarine groundwater discharge via airborne thermal infrared remote sensing. Remote Sens. Environ. 2015, 171, 202–217. [Google Scholar] [CrossRef] [Green Version]
- General Operating and Flight Rules, 14 C.F.R. § 91. 2021. Available online: https://www.ecfr.gov/cgi-bin/text-idx?node=14:2.0.1.3.10 (accessed on 28 January 2021).
- Small Unmanned Aircraft Systems, 14 C.F.R. § 107. 2021. Available online: https://www.ecfr.gov/cgi-bin/text-idx?node=pt14.2.107&rgn=div5 (accessed on 28 January 2021).
- FLIR. Technical Note: Radiometric Temperature Measurements. 2016. Available online: www.flir.com/suas (accessed on 8 September 2020).
- DJI. Matrice 200 Series V2, M210 V2/M210 RTK V2, User Manual v1.4. 2019. Available online: https://www.dji.com/matrice-200-series-v2/info#downloads (accessed on 4 January 2021).
- Danielescu, S.; MacQuarrie, K.T.B.; Faux, R.N. The integration of thermal infrared imaging, discharge measurements and numerical simulation to quantify the relative contributions of freshwater inflows to small estuaries in Atlantic Canada. Hydrol. Process. 2009, 23, 2847–2859. [Google Scholar] [CrossRef]
- Mallast, U.; Siebert, C. Combining continuous spatial and temporal scales for SGD investigations using UAV-based thermal infrared measurements. Hydrol. Earth Syst. Sci. 2019, 23, 1375–1392. [Google Scholar] [CrossRef] [Green Version]
- Dugdale, S.J.; Kelleher, C.A.; Malcolm, I.A.; Caldwell, S.; Hannah, D.M. Assessing the potential of drone-based thermal infrared imagery for quantifying river temperature heterogeneity. Hydrol. Process. 2019, 33, 1152–1163. [Google Scholar] [CrossRef]
- Ore, J.; Burgin, A.; Schoepfer, V.; Detweiler, C. Towards monitoring saline wetlands with micro UAVs. In Proceedings of the Robot Science and Systems Workshop on Robotic Monitoring, Berkeley, CA, USA, 12–16 July 2014. [Google Scholar]
- Kelly, J.L. Identification and quantification of submarine groundwater discharge in the Hawaiian Islands. Ph.D. Thesis, University of Hawaii, Honolulu, UI, USA, 2012. [Google Scholar]
- Kelly, J.L.; Glenn, C.R.; Lucey, P.G. High-resolution aerial infrared mapping of groundwater discharge to the coastal ocean. Limnol. Oceanogr. Methods 2013, 11, 262–277. [Google Scholar] [CrossRef]
- Mulligan, A.E.; Charette, M.A. Intercomparison of submarine groundwater discharge estimates from a sandy unconfined aquifer. J. Hydrol. 2006, 327, 411–425. [Google Scholar] [CrossRef]
- Scott, M.K.; Moran, S.B. Ground water input to coastal salt ponds of southern Rhode Island estimated using 226Ra as a tracer. J. Environ. Radioact. 2001, 54, 163–174. [Google Scholar] [CrossRef]
- Stachelhaus, S.L.; Moran, S.B.; Kelly, R.P. An evaluation of the efficacy of radium isotopes as tracers of submarine groundwater discharge to southern Rhode Island’s coastal ponds. Mar. Chem. 2012, 130–131, 49–61. [Google Scholar] [CrossRef]
- Li, H.; Jiao, J. Quantifying tidal contribution to submarine groundwater discharges: A review. Chin. Sci. Bull. 2013, 58, 3053–3059. [Google Scholar] [CrossRef] [Green Version]
- Glover, R.E. The pattern of fresh-water flow in a coastal aquifer. J. Geophys. Res. Space Phys. 1959, 64, 457–459. [Google Scholar] [CrossRef]
- Fetter, C.W. Applied Hydrogeology, 4th ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Johnson, A.G.; Glenn, C.R.; Burnett, W.C.; Peterson, R.N.; Lucey, P.G. Aerial infrared imaging reveals large nutrient-rich groundwater inputs to the ocean. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) 336 × 256 resolution: | ||||||||||
| FRAME SIZE, f [m], VueProR 336 FRAME AREA, F [m2] | ||||||||||
| sensor distance, R [m] | ||||||||||
| lens FOV | FOV angle [°] | variable, dimensions | 15 | 30 | 46 | 61 | 76 | 91 | 107 | 122 |
| 6.8 mm | 45 | fwidth [m] | 12.6 | 25.3 | 37.9 | 50.5 | 63.1 | 75.8 | 88.4 | 101.0 |
| 35 | fheight [m] | 9.6 | 19.2 | 28.8 | 38.4 | 48.1 | 57.7 | 67.3 | 76.9 | |
| 6.8 mm | 45 × 35 | Farea [m2] | 121.3 | 485.3 | 1092.0 | 1941.3 | 3033.3 | 4368.0 | 5945.3 | 7765.3 |
| 9 mm | 35 | fwidth [m] | 9.6 | 19.2 | 28.8 | 38.4 | 48.1 | 57.7 | 67.3 | 76.9 |
| 27 | fheight [m] | 7.3 | 14.6 | 22.0 | 29.3 | 36.6 | 43.9 | 51.2 | 58.5 | |
| 9 mm | 35 × 27 | Farea [m2] | 70.3 | 281.3 | 632.9 | 1125.2 | 1758.1 | 2531.7 | 3445.9 | 4500.8 |
| 13 mm | 25 | fwidth [m] | 6.8 | 13.5 | 20.3 | 27.0 | 33.8 | 40.5 | 47.3 | 54.1 |
| 19 | fheight [m] | 5.1 | 10.2 | 15.3 | 20.4 | 25.5 | 30.6 | 35.7 | 40.8 | |
| 13 mm | 25 × 19 | Farea [m2] | 34.5 | 137.9 | 310.2 | 551.5 | 861.7 | 1240.8 | 1688.8 | 2205.8 |
| PIXEL SIZE, p [m], VueProR 336 TARGET ASSESSMENT AREA, T [m2] | ||||||||||
| sensor distance, R [m] | ||||||||||
| lens FOV | FOV angle [°] | variable, dimensions | 15 | 30 | 46 | 61 | 76 | 91 | 107 | 122 |
| 6.8 mm | 45 | pwidth [m] | 0.038 | 0.075 | 0.113 | 0.150 | 0.188 | 0.225 | 0.263 | 0.301 |
| 35 | pheight [m] | 0.038 | 0.075 | 0.113 | 0.150 | 0.188 | 0.225 | 0.263 | 0.300 | |
| 6.8 mm | 45 × 35 | Tarea [m2] | 0.111 | 0.444 | 0.998 | 1.774 | 2.772 | 3.992 | 5.434 | 7.097 |
| 9 mm | 35 | pwidth [m] | 0.029 | 0.057 | 0.086 | 0.114 | 0.143 | 0.172 | 0.200 | 0.229 |
| 27 | pheight [m] | 0.029 | 0.057 | 0.086 | 0.114 | 0.143 | 0.172 | 0.200 | 0.229 | |
| 9 mm | 35 × 27 | Tarea [m2] | 0.064 | 0.257 | 0.578 | 1.028 | 1.606 | 2.313 | 3.148 | 4.112 |
| 13 mm | 25 | pwidth [m] | 0.020 | 0.040 | 0.060 | 0.080 | 0.101 | 0.121 | 0.141 | 0.161 |
| 19 | pheight [m] | 0.020 | 0.040 | 0.060 | 0.080 | 0.100 | 0.120 | 0.139 | 0.159 | |
| 13 mm | 25 × 19 | Tarea [m2] | 0.032 | 0.127 | 0.286 | 0.508 | 0.794 | 1.144 | 1.556 | 2.033 |
| (b) 640 × 512 resolution: | ||||||||||
| FRAME SIZE, f [m], VueProR 640 FRAME AREA, F [m2] | ||||||||||
| sensor distance, R [m] | ||||||||||
| lens FOV | FOV angle [°] | variable, dimensions | 15 | 30 | 46 | 61 | 76 | 91 | 107 | 122 |
| 9 mm | 69 | fwidth [m] | 20.9 | 41.9 | 62.8 | 83.8 | 104.7 | 125.7 | 146.6 | 167.6 |
| 56 | fheight [m] | 16.2 | 32.4 | 48.6 | 64.8 | 81.0 | 97.2 | 113.4 | 129.7 | |
| 9 mm | 69 × 56 | Farea [m2] | 339.5 | 1358.0 | 3055.5 | 5432.0 | 8487.5 | 12222.0 | 16635.5 | 21727.9 |
| 13 mm | 45 | fwidth [m] | 12.6 | 25.3 | 37.9 | 50.5 | 63.1 | 75.8 | 88.4 | 101.0 |
| 37 | fheight [m] | 10.2 | 20.4 | 30.6 | 40.8 | 51.0 | 61.2 | 71.4 | 81.6 | |
| 13 mm | 45 × 37 | Farea [m2] | 128.8 | 515.0 | 1158.8 | 2060.1 | 3218.9 | 4635.3 | 6309.1 | 8240.5 |
| 19 mm | 32 | fwidth [m] | 8.7 | 17.5 | 26.2 | 35.0 | 43.7 | 52.4 | 61.2 | 69.9 |
| 26 | fheight [m] | 7.0 | 14.1 | 21.1 | 28.1 | 35.2 | 42.2 | 49.3 | 56.3 | |
| 19 mm | 32 × 26 | Farea [m2] | 61.5 | 246.0 | 553.5 | 984.0 | 1537.6 | 2214.1 | 3013.6 | 3936.1 |
| PIXEL SIZE, p [m], VueProR 640 TARGET ASSESSMENT AREA, T [m2] | ||||||||||
| sensor distance, R [m] | ||||||||||
| lens FOV | FOV angle [°] | variable, dimensions | 15 | 30 | 46 | 61 | 76 | 91 | 107 | 122 |
| 9 mm | 69 | pwidth [m] | 0.033 | 0.065 | 0.098 | 0.131 | 0.164 | 0.196 | 0.229 | 0.262 |
| 56 | pheight [m] | 0.032 | 0.063 | 0.095 | 0.127 | 0.158 | 0.190 | 0.222 | 0.253 | |
| 9 mm | 69 × 56 | Tarea [m2] | 0.084 | 0.337 | 0.757 | 1.346 | 2.104 | 3.029 | 4.123 | 5.385 |
| 13 mm | 45 | pwidth [m] | 0.020 | 0.039 | 0.059 | 0.079 | 0.099 | 0.118 | 0.138 | 0.158 |
| 37 | pheight [m] | 0.020 | 0.040 | 0.060 | 0.080 | 0.100 | 0.120 | 0.139 | 0.159 | |
| 13 mm | 45 × 37 | Tarea [m2] | 0.031 | 0.122 | 0.275 | 0.489 | 0.764 | 1.100 | 1.498 | 1.956 |
| 19 mm | 32 | pwidth [m] | 0.014 | 0.027 | 0.041 | 0.055 | 0.068 | 0.082 | 0.096 | 0.109 |
| 26 | pheight [m] | 0.014 | 0.027 | 0.041 | 0.055 | 0.069 | 0.082 | 0.096 | 0.110 | |
| 19 mm | 32 × 26 | Tarea [m2] | 0.015 | 0.059 | 0.132 | 0.234 | 0.366 | 0.527 | 0.718 | 0.937 |
| Study | Location(s) | SGD Flux Method (Rn = Radon Mass Balance; Ra = Radium Mass Balance) | SGD Flux Timing (LT = Low Tide HT = High Tide TA = Time-Averaged) | TIR Method | TIR Timing (LT = Low Tide HT = High Tide MT = Mid-Tide) | Regression (SGD Flux vs. Plume Area) | R2 |
|---|---|---|---|---|---|---|---|
| Danielescu et al., 2009 | Trout River Estuary, McIntyre Creek Estuary (Atlantic, Canada) | current meter (for springs); MODFLOW/numerical (for diffuse SGD) | July 2007; TA | manned aircraft | September 2005; LT | logarithmic | 0.89 |
| Kelly et al., 2013 | Pearl Harbor (HI, U.S.) | Rn | January–March 2010; TA | manned aircraft | July 2009; LT | linear | 0.98 |
| Tamborski et al., 2015 | Port Jefferson Harbor, Smithtown Bay, E. Suffolk County (Long Island Sound, NY, U.S.) | Rn; seepage meters | August 2012, June 2013, September 2014; TA | manned aircraft | July 2014, August 2013, September 2014; LT | linear | 0.94 0.93 0.81 |
| Lee et al., 2016 | Gongcheonpo Beach, Jeju Island (Korea) | current meter | July 2014, August 2015; LT | sUAS | August 2015; LT, HT, MT | linear | 0.99 |
| Bejannin et al., 2017 | French Mediterranean (France) | Ra | May 2009–April 2016 (varies) | manned aircraft | September 2012 | linear | 0.99 |
| Average R2: | 0.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Young, K.S.R.; Pradhanang, S.M. Small Unmanned Aircraft (sUAS)-Deployed Thermal Infrared (TIR) Imaging for Environmental Surveys with Implications in Submarine Groundwater Discharge (SGD): Methods, Challenges, and Novel Opportunities. Remote Sens. 2021, 13, 1331. https://doi.org/10.3390/rs13071331
Young KSR, Pradhanang SM. Small Unmanned Aircraft (sUAS)-Deployed Thermal Infrared (TIR) Imaging for Environmental Surveys with Implications in Submarine Groundwater Discharge (SGD): Methods, Challenges, and Novel Opportunities. Remote Sensing. 2021; 13(7):1331. https://doi.org/10.3390/rs13071331
Chicago/Turabian StyleYoung, Kyle S. R., and Soni M. Pradhanang. 2021. "Small Unmanned Aircraft (sUAS)-Deployed Thermal Infrared (TIR) Imaging for Environmental Surveys with Implications in Submarine Groundwater Discharge (SGD): Methods, Challenges, and Novel Opportunities" Remote Sensing 13, no. 7: 1331. https://doi.org/10.3390/rs13071331
APA StyleYoung, K. S. R., & Pradhanang, S. M. (2021). Small Unmanned Aircraft (sUAS)-Deployed Thermal Infrared (TIR) Imaging for Environmental Surveys with Implications in Submarine Groundwater Discharge (SGD): Methods, Challenges, and Novel Opportunities. Remote Sensing, 13(7), 1331. https://doi.org/10.3390/rs13071331