
Inconsistency among Landsat Sensors in Land Surface Mapping: A Comprehensive Investigation Based on Simulation

 ,
,
Abstract
:1. Introduction
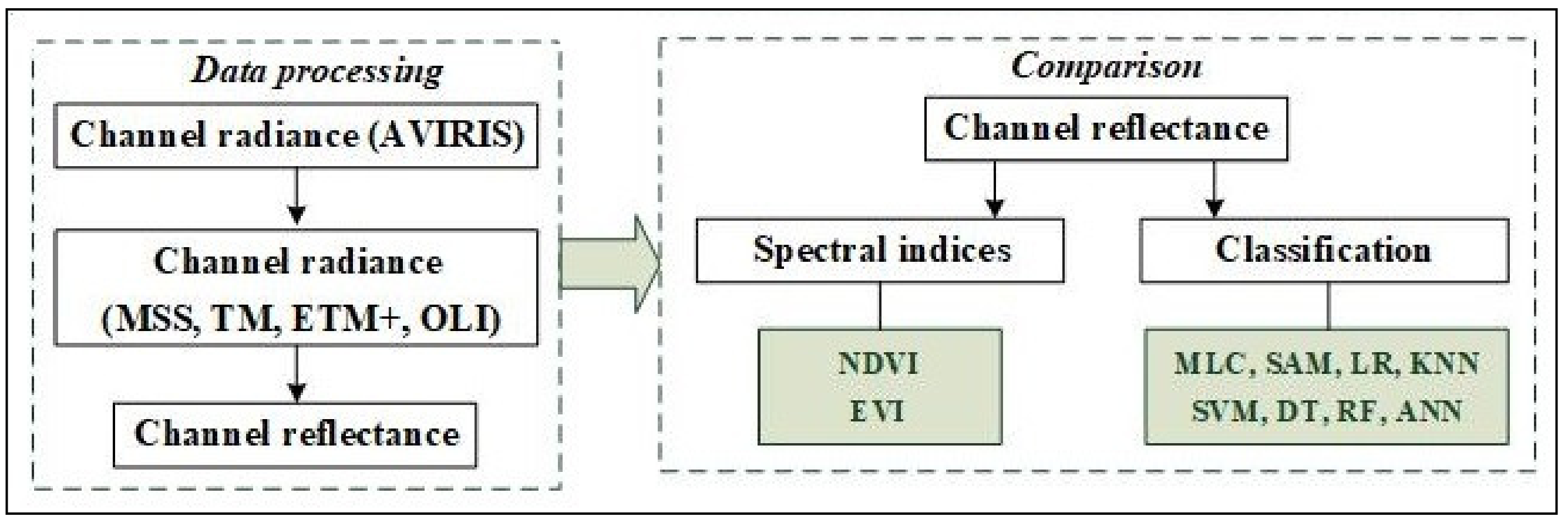
2. Materials and Methods
2.1. Indian Pines AVIRIS Data
2.2. Channel Reflectance of Landsat Observations
2.2.1. Obtaining Synthesized Channel Radiance
2.2.2. Estimating the Channel Reflectance Considering Solar Irradiance
2.3. Comparison of Landsat Observations in Reflectance and Derived Vegetation Spectral Indices
2.4. Comparison of Landsat Observations in Land Use Classification
2.4.1. Classifiers Used in Classification Experiments
- SAM is a physically based spectral classification that uses a spectral angle to match pixels to the reference. The smaller angles represent closer matches to the reference [40]. In contrast to conventional MLC, SAM is relatively insensitive to illumination and albedo effects. For the application of SAM, a target pixel was labeled as the same class of a reference which showed the smallest angle (most similarity).
- LR constructs a separating hyperplane between two data sets through a logistic function to express distance from the hyperplane, which is regarded as a probability of class membership [41]. For application of LR, the class with maximum probability calculated from the sigmoid function was assigned correspondingly.
- For the KNN method, only the number of neighbors closest to the target pixel is predetermined for classification, whereas for most other classification algorithms, certain parameterizations and the choice of optimal parameter sets are required. In classification through KNN, each unknown sample is directly compared against the training data [42]. Its relative simplicity and robustness make KNN a valuable method when there are limitations in computational resources [39].
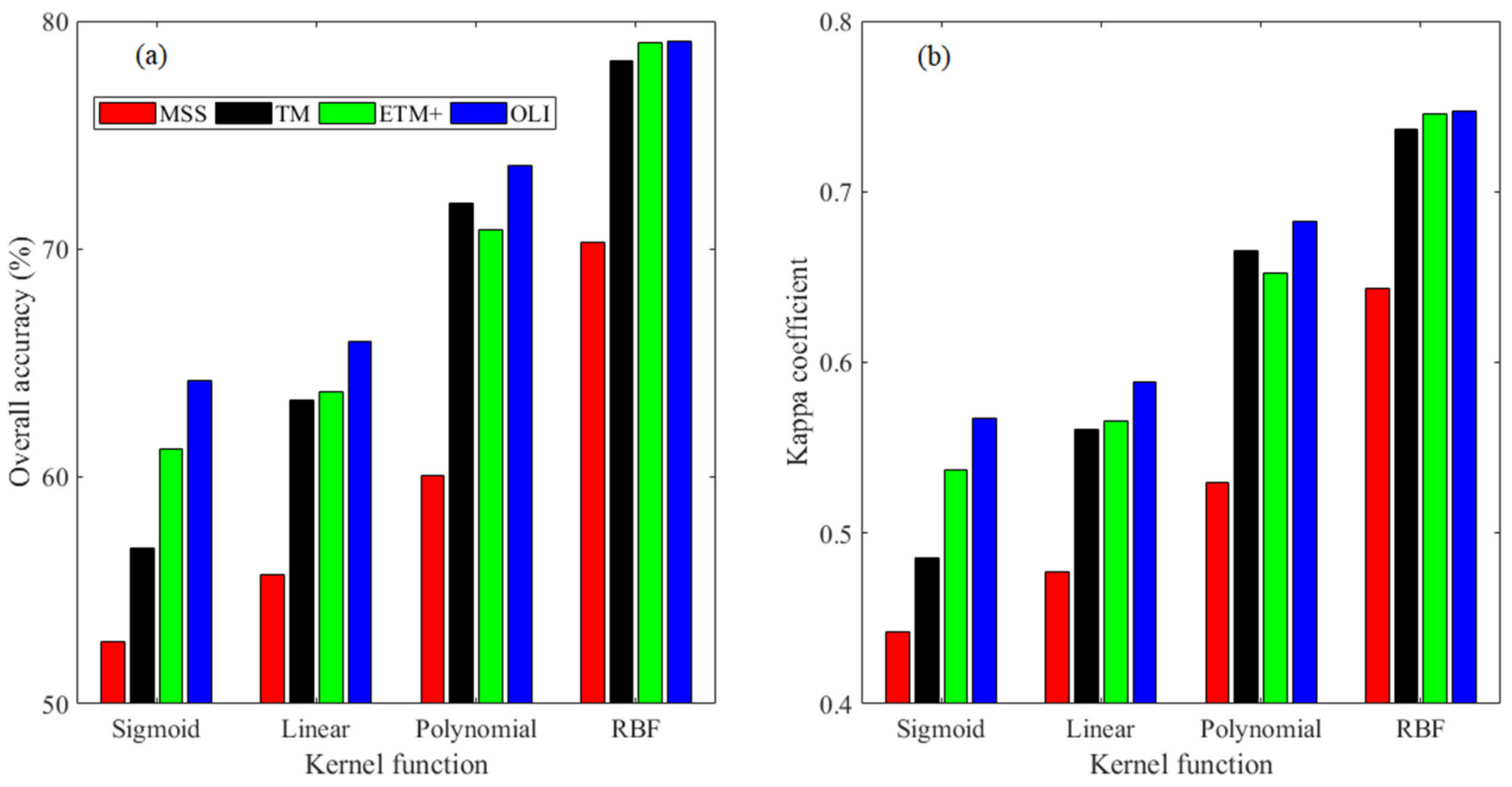
- The SVM method, based on statistical learning theory, includes a group of non-parametric classifiers [43,44]. SVM is able to produce results with higher accuracy compared with other classifiers [39], even with small training samples [37]. Nevertheless, the performance of SVM is mainly determined by the kernel used and corresponding parameters [36,38,45]. Four kernels widely used, specifically, sigmoid, linear, polynomial, and radial basis function (RBF), also known as Gaussian, were implemented and compared in terms of overall accuracy and Kappa coefficients. According to the experiments on the Indian Pines data, the SVMs with RBF outperformed the SVMs with other kernels (see Section 3.3).
- RF is an ensemble classifier that uses many DTs to overcome the weaknesses of a single DT [46,47,48]. The RF is considered an improved version of bagging, being comparable to boosting in terms of accuracy but computationally much less intensive than boosting [46,47]. The capabilities of RF for land use/cover mapping have been demonstrated [47,48,49].
- The ANN consists of several highly interconnected processing units (named artificial neurons). The information flow of ANN is stored as connection strengths (called weights) between the neurons [41]. The ability to calculate nonlinear decision boundaries makes the ANN attractive [41]. The accuracy of ANN is dependent on factors such as the number of hidden nodes [50]. In this paper, the ANN with one hidden layer (called a shallow neural network) was implemented for classification, while deep networks [51,52] with increasing trends for application were not considered.
2.4.2. Training and Accuracy Assessments
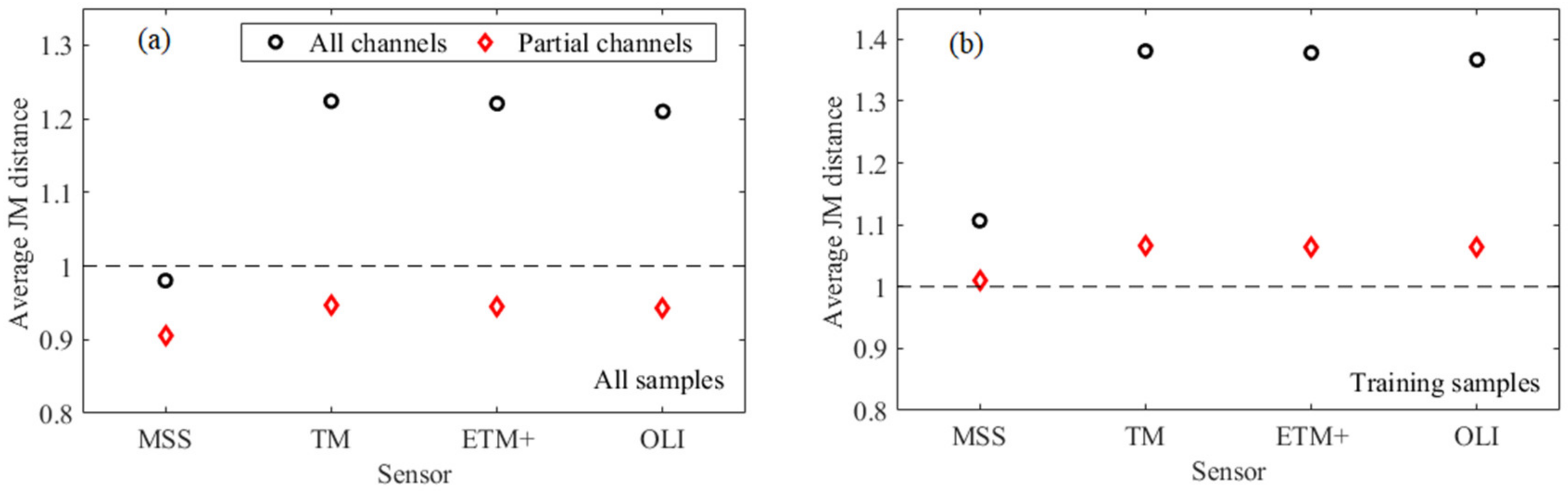
2.4.3. Class Separability Measured by Jeffries–Matusita (JM) Distance
3. Results
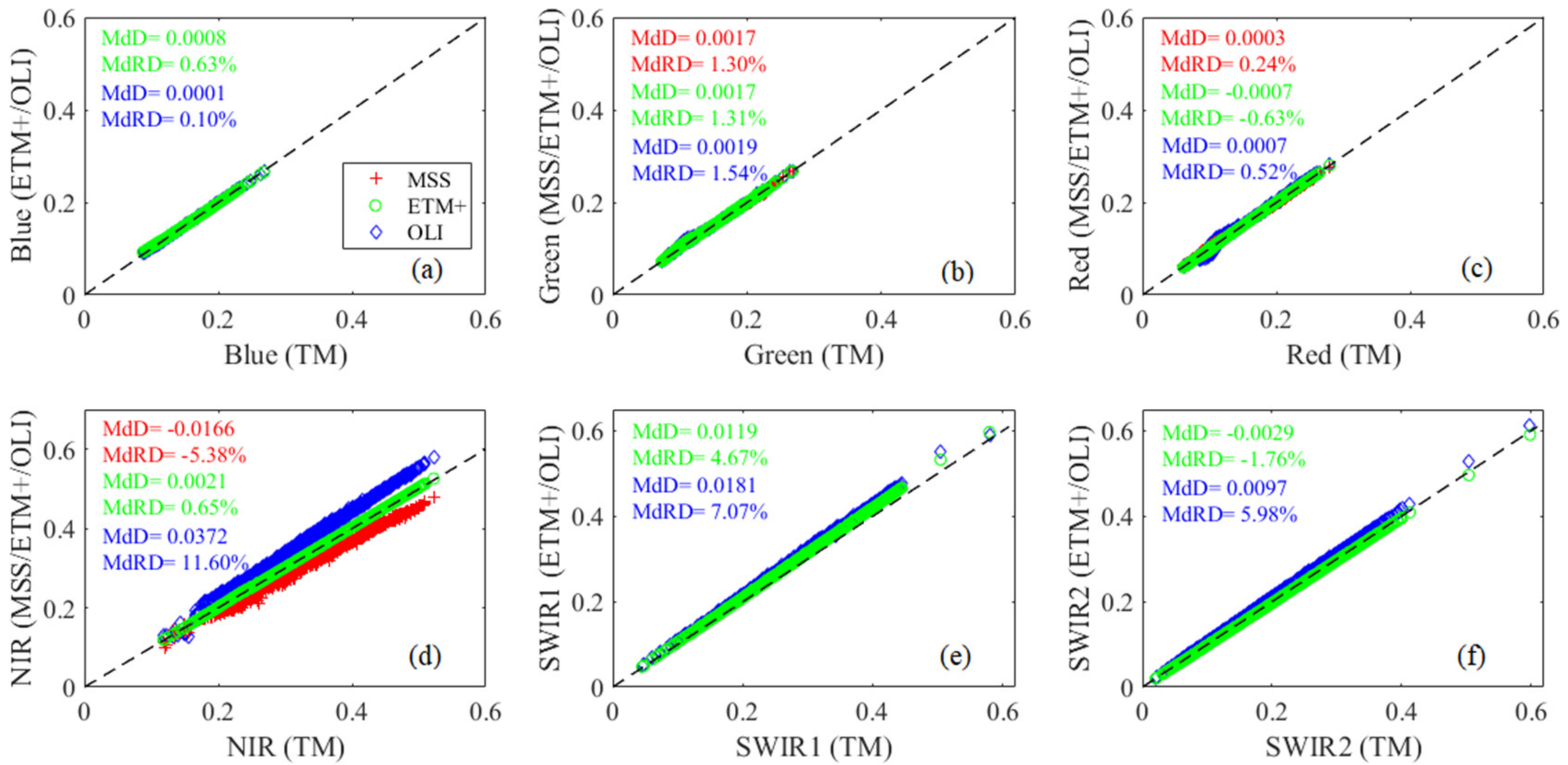
3.1. Characterization Differences in Channel Reflectance
3.2. Consistency among the Landsat Sensors in Vegetation Spectral Indices
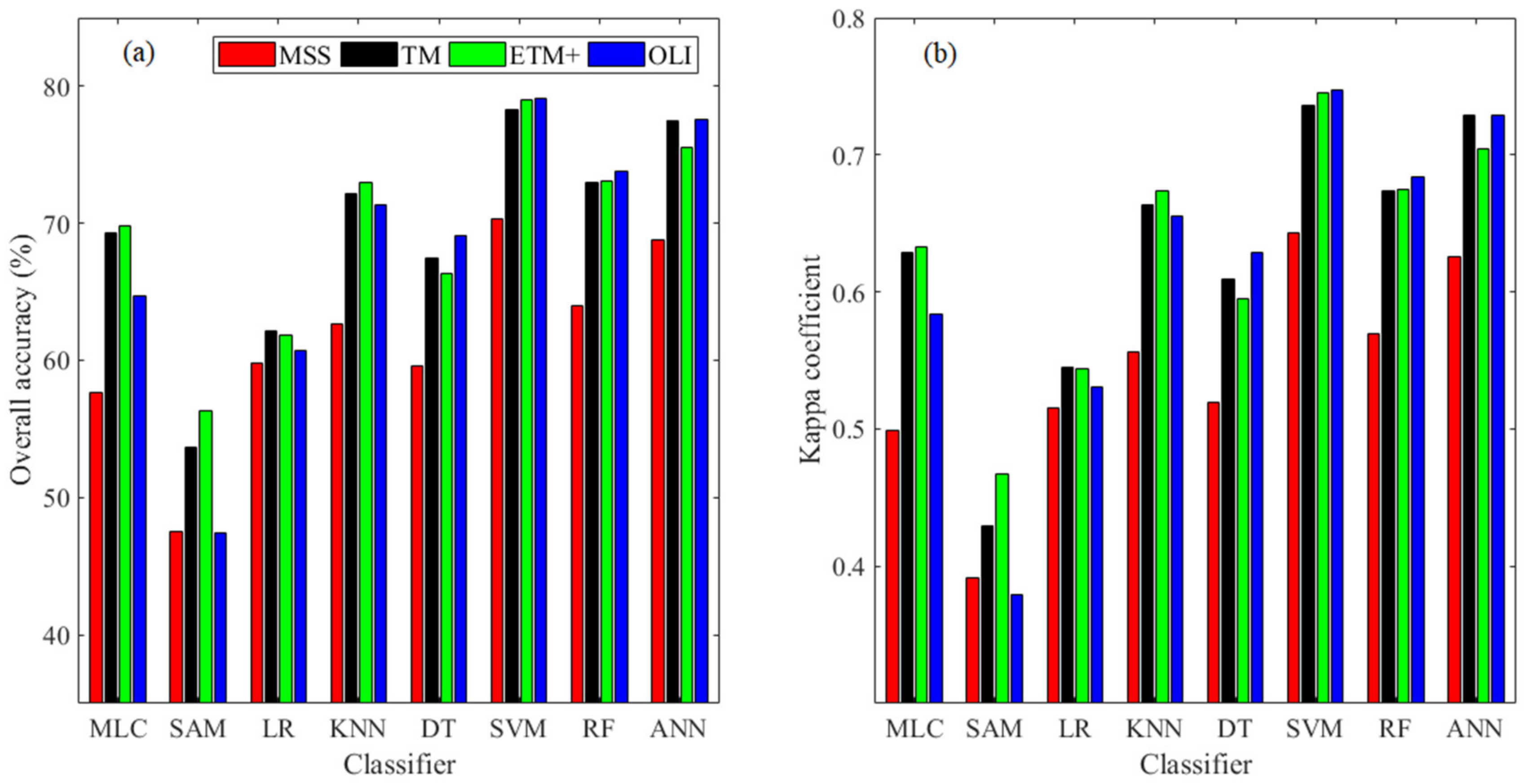
3.3. Comparison of General Classification Results
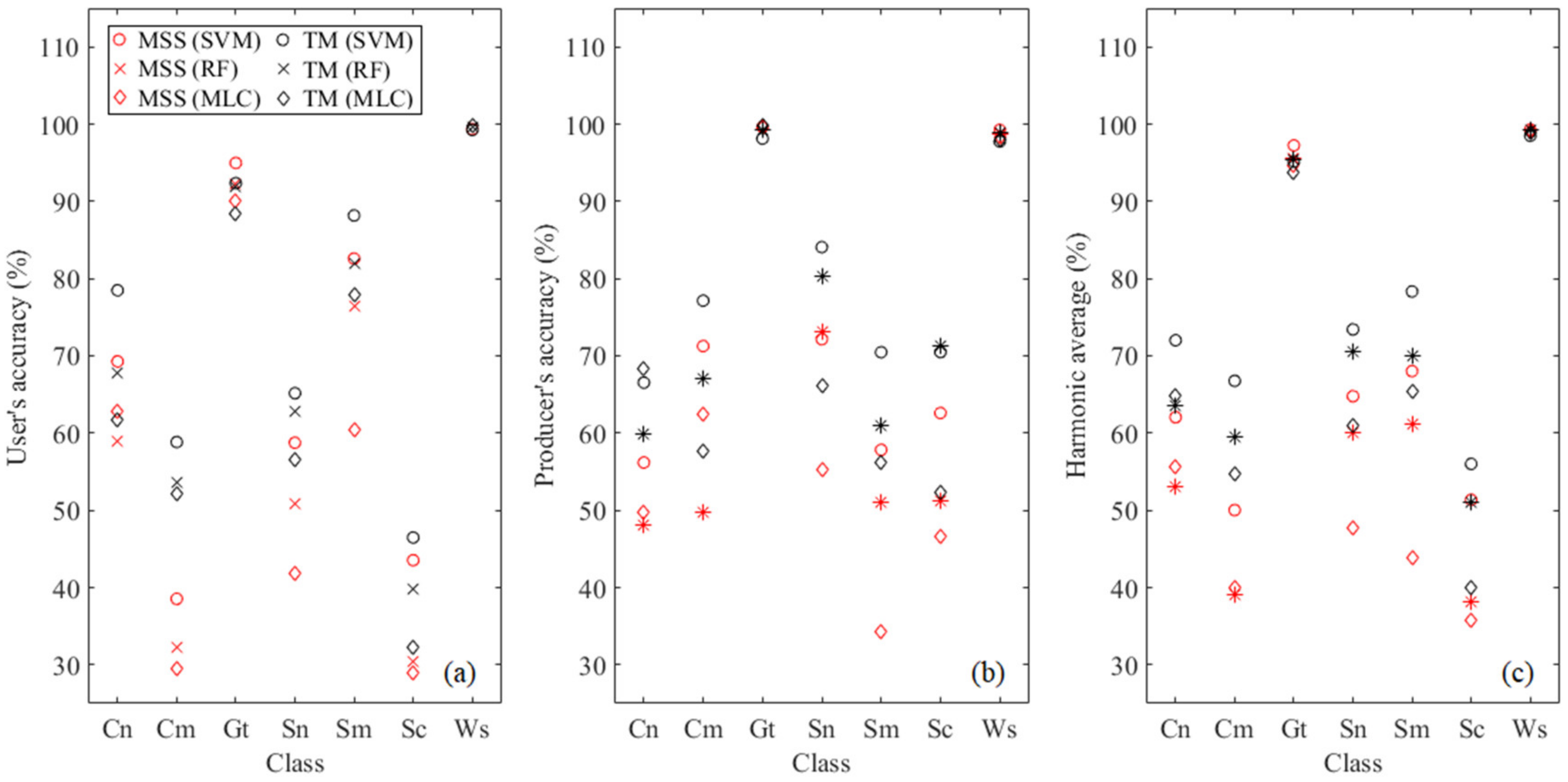
3.4. Comparison of Individual Classes
4. Discussion
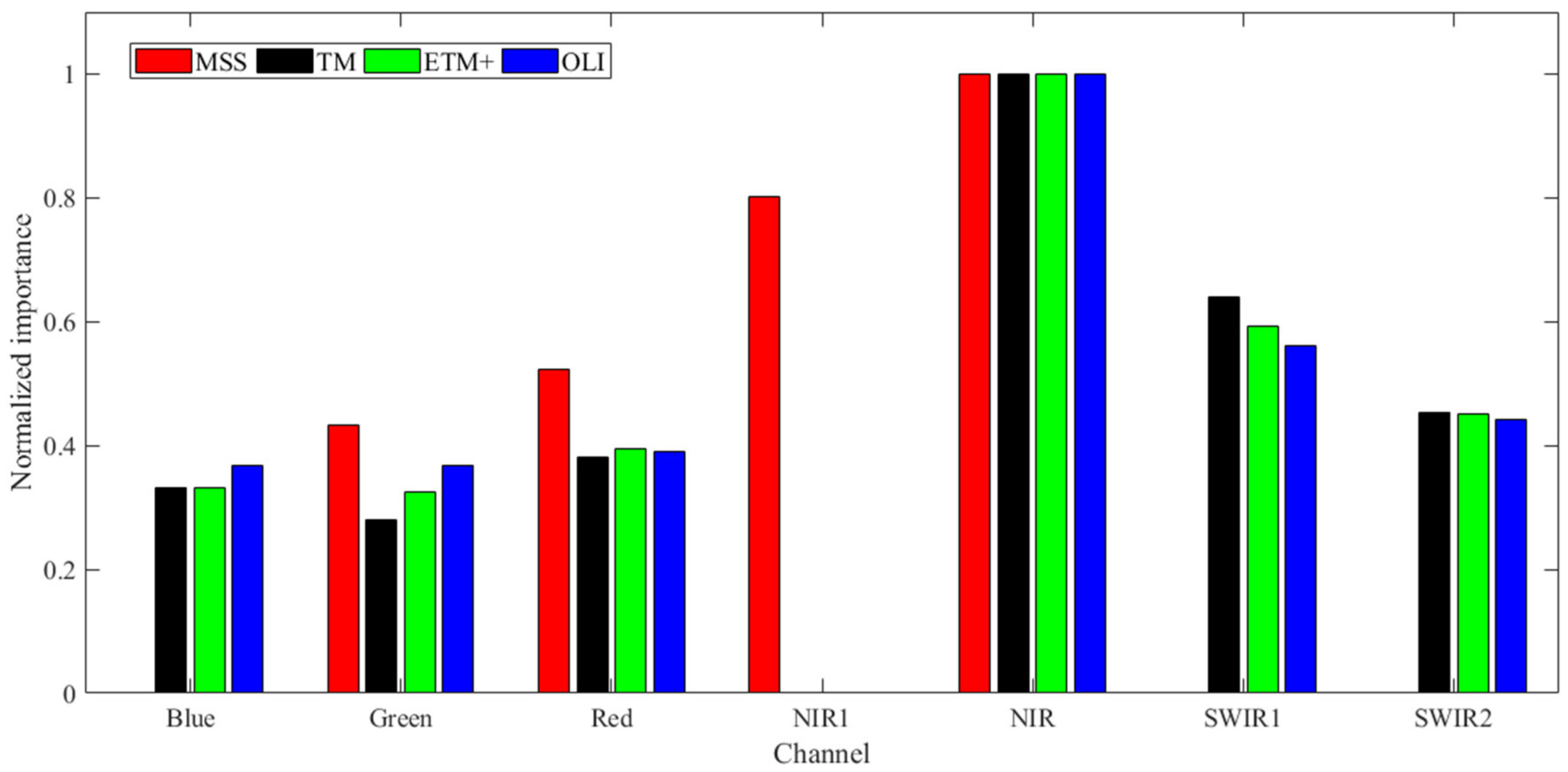
4.1. Contribution of Sensor Characterizations to Classification
4.2. Sensor Characterization and Classifier on Classification
4.3. Solar Spectrum Selection
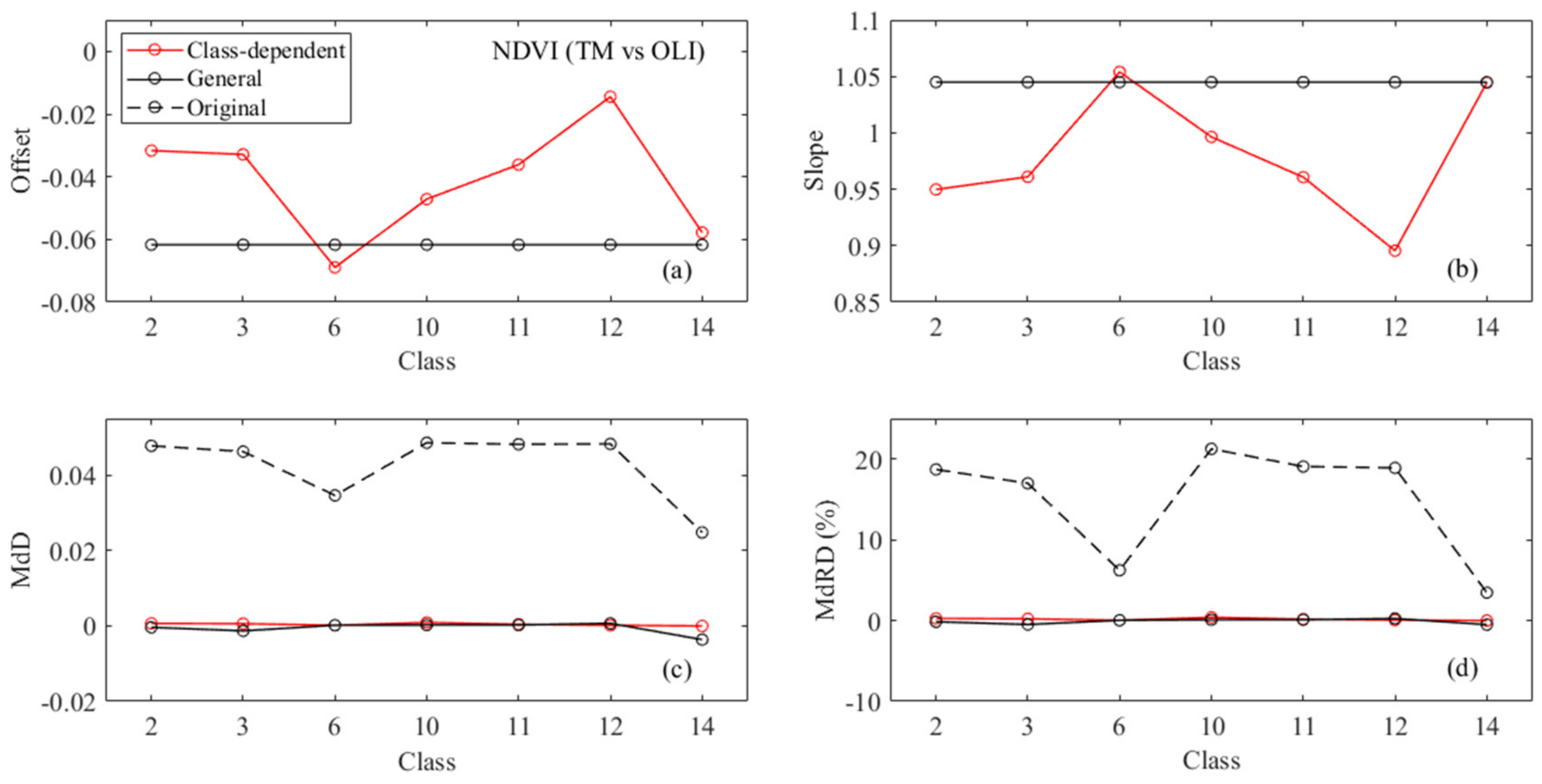
4.4. Improving Consistency among the Landsat Sensors in Channel Reflectance and Vegetation Spectral Indices
4.5. Improving Classification Consistency among the Landsat Sensors
4.6. Other Issues Challenging Consistency among Landsat Observations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Woodcock, C.E.; Allen, R.; Anderson, M.; Belward, A.; Bindschadler, R.; Cohen, W.; Gao, F.; Goward, S.N.; Helder, D.; Helmer, E.; et al. Free access to Landsat imagery. Science 2008, 320, 1011. [Google Scholar] [CrossRef] [PubMed]
- Wulder, M.A.; White, J.C.; Loveland, T.R.; Woodcock, C.E.; Belward, A.S.; Cohen, W.B.; Fosnight, E.A.; Shaw, J.; Masek, J.G.; Roy, D.P. The global Landsat archive: Status, consolidation, and direction. Remote Sens. Environ. 2016, 185, 271–283. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z. Change detection using Landsat time series: A review of frequencies, preprocessing, algorithms, and applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Zhu, Z.; Wulder, M.A.; Roy, D.P.; Woodcock, C.E.; Hansen, M.C.; Radeloff, V.C.; Healeyg, S.P.; Schaaf, C.; Hostert, P.; Strobl, P.; et al. Benefits of the free and open Landsat data policy. Remote Sens. Environ. 2019, 224, 382–385. [Google Scholar] [CrossRef]
- Wulder, M.A.; Loveland, T.R.; Roy, D.P.; Crawford, C.J.; Masek, J.G.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Belward, A.S.; Cohen, W.B.; et al. Current status of Landsat program, science, and applications. Remote Sens. Environ. 2019, 225, 127–147. [Google Scholar] [CrossRef]
- Landsat Missions. Available online: https://www.usgs.gov/core-science-systems/nli/landsat (accessed on 10 March 2021).
- Chen, F.; Fan, Q.; Lou, S.; Yang, L.M.; Wang, C.; Claverie, M.; Wang, C.; Junior, J.M.; Gonçalves, W.N.; Li, J. Characterization of MSS Channel Reflectance and Derived Spectral Indices for Building Consistent Landsat 1-5 Data Record. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8967–8984. [Google Scholar] [CrossRef]
- Holden, C.E.; Woodcock, C.E. An analysis of Landsat 7 and Landsat 8 underflight data and the implications for time series investigations. Remote Sens. Environ. 2016, 185, 16–36. [Google Scholar] [CrossRef] [Green Version]
- Markogianni, V.; Dimitriou, E. Landuse and NDVI change analysis of Sperchios river basin (Greece) with different spatial resolution sensor data by Landsat/MSS/TM and OLI. Desalin. Water Treat. 2016, 57, 29092–29103. [Google Scholar] [CrossRef]
- Mohajane, M.; Essahlaoui, A.; Oudija, F.; El Hafyani, M.; El Hmaidi, A.; El Ouali, A.; Randazzo, G.; Teodoro, C.A. Land use/land cover (LULC) using Landsat data series (MSS, TM, ETM+ and OLI) in Azrou Forest, in the Central Middle Atlas of Morocco. Environments 2018, 5, 131. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Jiang, L.; Feng, Z. Cross-comparison of vegetation indices derived from Landsat-7 Enhanced Thematic Mapper Plus (ETM+) and Landsat-8 Operational Land Imager (OLI) sensors. Remote Sens. 2014, 6, 310–329. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Kovalskyy, V.; Zhang, H.K.; Vermote, E.F.; Yan, L.; Kumar, S.S.; Egorov, A. Characterization of Landsat-7 to Landsat-8 reflective wavelength and normalized difference vegetation index continuity. Remote Sens. Environ. 2016, 185, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Yang, S.; Yin, K.; Chan, P. Challenges to quantitative applications of Landsat observations for the urban thermal environment. J. Environ. Sci. 2017, 59, 80–88. [Google Scholar] [CrossRef]
- Chen, F.; Lou, S.; Fan, Q.; Wang, C.; Claverie, M.; Wang, C.; Li, J. Normalized difference vegetation index continuity of the Landsat 4-5 MSS and TM: Investigations based on simulation. Remote Sens. 2019, 11, 1681. [Google Scholar] [CrossRef] [Green Version]
- Mancino, G.; Ferrara, A.; Padula, A.; Nolè, A. Cross-comparison between Landsat 8 (OLI) and Landsat 7 (ETM+) derived vegetation indices in a Mediterranean environment. Remote Sens. 2020, 12, 291. [Google Scholar] [CrossRef] [Green Version]
- Haack, B.; Bryant, N.; Adams, S. An assessment of Landsat MSS and TM data for urban and near-urban land-cover digital classification. Remote Sens. Environ. 1987, 21, 201–213. [Google Scholar] [CrossRef]
- Khorram, S.; Brockhaus, J.A.; Cheshire, H.M. Comparison of Landsat MSS and TM data for urban land-use classification. IEEE Trans. Geosci. Remote Sens. 1987, GE-25, 238–243. [Google Scholar] [CrossRef]
- Masek, J.G.; Honzak, M.; Goward, S.N.; Liu, P.; Pak, E. Landsat-7 ETM+ as an observatory for land cover: Initial radiometric and geometric comparisons with Landsat-5 Thematic Mapper. Remote Sens. Environ. 2001, 78, 118–130. [Google Scholar] [CrossRef]
- Blonski, S.; Glasser, G.; Russell, J.; Ryan, R.; Terrie, G.; Zanoni, V. Synthesis of multispectral bands from hyperspectral data: Validation based on images acquired by AVIRIS, Hyperion, ALI, and ETM+. Available online: https://ntrs.nasa.gov/search.jsp?R=20040010531 (accessed on 31 March 2021).
- Platt, R.V.; Goetz, A.F.H. A comparison of AVIRIS and Landsat for land use classification at the urban fringe. Photogramm. Eng. Rem. S. 2004, 70, 813–819. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef] [Green Version]
- Baumgardner, M.F.; Biehl, L.L.; Landgrebe, D.A. 220 Band AVIRIS Hyperspectral Image Data Set: June 12, 1992 Indian Pine Test Site 3. Purdue University Research Repository. 2015. Available online: https://purr.purdue.edu/publications/1947/1 (accessed on 31 March 2021). [CrossRef]
- Information on 220 Channel AVIRIS Data Set. Available online: https://engineering.purdue.edu/~biehl/MultiSpec/aviris_documentation.html (accessed on 10 March 2021).
- Thuillier, G.; Herse, M.; Labs, S.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The solar spectral irradiance from 200 to 2400 nm as measured by SOLSPEC Spectrometer from the ATLAS 123 and EURECA missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B.L.; Helder, D.L. Summery of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ. 2009, 113, 893–903. [Google Scholar] [CrossRef]
- Gascon, F.; Bouzinac, C.; Thépaut, O.; Jung, M.; Francesconi, B.; Louis, J.; Lonjou, V.; Lafrance, B.; Massera, S.; Gaudel-Vacaresse, A.; et al. Copernicus Sentinel-2A calibration and products validation status. Remote Sens. 2017, 9, 584. [Google Scholar] [CrossRef] [Green Version]
- USGS (U.S. Geological Survey). Landsat 8 (L8) Data Users Handbook (LSDS-1574) (Version 5.0). Available online: https://prd-wret.s3.us-west-2.amazonaws.com/assets/palladium/production/atoms/files/LSDS-1574_L8_Data_Users_Handbook-v5.0.pdf (accessed on 31 March 2021).
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Shettle, E.P. MODTRAN®5.2.0.0 User’s Manual; Hanscom Air Force Base: Bedford, MA, USA, 2008. [Google Scholar]
- Chen, F.; Yang, S.; Su, Z.; Wang, K. Effect of emissivity uncertainty on surface temperature retrieval over urban areas: Investigations based on spectral libraries. ISPRS J. Photogramm. Remote Sens. 2016, 114, 53–65. [Google Scholar] [CrossRef]
- Tucker, J.C. Red and photographic infrared linear combination for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Landsat Surface Reflectance-Derived Spectral Indices. Available online: https://www.usgs.gov/core-science-systems/nli/landsat/landsat-surface-reflectance-derived-spectral-indices?qt-science_support_page_related_con=0#qt-science_support_page_related_con (accessed on 31 March 2021).
- Manandhar, R.; Odeh, I.O.A.; Ancev, T. Improving the accuracy of land use and land cover classification of Landsat data using post-classification enhancement. Remote Sens. 2009, 1, 330–344. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Liang, L.; Wang, J.; Zhao, Y.; Cheng, Q.; Hu, L.; Liu, S.; Yu, L.; Wang, X.; Zhu, P.; et al. Meta-discoveries form a synthesis of satellite-based land-cover mapping research. Int. J. Remote Sens. 2014, 35, 4573–4588. [Google Scholar] [CrossRef]
- Huang, C.; Davis, L.S.; Townshed, J.G.G. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Pal, M.; Mather, P.M. Support vector machines for classification in remote sensing. Int. J. Remote Sens. 2005, 26, 1007–1011. [Google Scholar] [CrossRef]
- Kavzoglu, T.; Colkesen, I. A kernel function analysis for support vector machines for land cover classification. Int. J. Appl. Earth Obs. 2009, 11, 352–359. [Google Scholar] [CrossRef]
- Khatami, R.; Mountrakis, G.; Stehman, S.V. A meta-analysis of remote sensing research on supervised pixel-based land-cover image classification processes: General guidelines for practitioners and future research. Remote Sens. Environ. 2016, 177, 89–100. [Google Scholar] [CrossRef] [Green Version]
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.B.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The spectral image processing system (SIPS)-Interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Dreiseitl, S.; Ohno-Machado, L.; Kittler, H.; Vinterbo, S.; Billhardt, H.; Binder, M. A comparison of machine learning methods for the diagnosis of pigmented skin lesions. J. Biomed. Inform. 2001, 34, 28–36. [Google Scholar] [CrossRef] [Green Version]
- Maselli, F.; Chirici, G.; Bottai, L.; Corona, P.; Marchetti, M. Estimation of Mediterranean forest attributes by the application of k-NN procedures to multitemporal Landsat ETM+ images. Int. J. Remote Sens. 2005, 26, 3781–3796. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Vapnik, W.N. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef] [Green Version]
- Otukei, J.R.; Blaschke, T. Land cover change assessment using decision trees, support vector machines and maximum likelihood classification algorithms. Int. J. Appl. Earth Obs. 2012, 12, 27–31. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random Forests for land cover classification. Pattern Recogn. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a Random Forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Dixon, B.; Candade, N. Multispectral land use classification using neural networks and support vector machines: One or the other, or both? Int. J. Remote Sens. 2008, 29, 1185–1206. [Google Scholar] [CrossRef]
- Zhang, L.P.; Zhang, L.F.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.C.; Xia, G.-S.; Zhang, L.P.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comprehensive review and list of resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Corcoran, J.M.; Knight, J.F.; Gallant, A.L. Influence of multi-source and multi-temporal remotely sensed and ancillary data on the accuracy of Random Forest classification of wetlands in Northern Minnesota. Remote Sens. 2013, 5, 3212–3238. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Wang, J.; Wang, L.; Hu, L.; Gong, P. Comparison of classification algorithms and training sample sizes in urban land classification with Landsat Thematic Mapper imagery. Remote Sens. 2014, 6, 964–983. [Google Scholar] [CrossRef] [Green Version]
- Van Niel, T.G.; McVicar, T.R.; Datt, B. On the relationship between training sample size and data dimensionality: Monte Carlo analysis of broadband multi-temporal classification. Remote Sens. Environ. 2005, 98, 468–480. [Google Scholar] [CrossRef]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Joachims, T. A Support Vector Method for Multivariate Performance Measures. In Proceedings of the 22nd International Conference on Machine Learning, Bonn, Germany, 7–11 August 2005; ACM: New York, NY, USA, 2005. [Google Scholar]
- McNemar, Q. Note on the sampling error of the difference between correlated proportions or percentages. Psychometrika 1947, 12, 153–157. [Google Scholar] [CrossRef]
- De Leeuw, J.; Jia, H.; Yang, L.; Liu, X.; Schmidt, K.; Skidmore, A.K. Comparing accuracy assessments to infer superiority of image classification methods. Int. J. Remote Sens. 2006, 27, 223–232. [Google Scholar] [CrossRef]
- Sibanda, M.; Dube, T.; Mubango, T.; Shoko, C. The utility of earth observation technologies in understanding impacts of land reform in the eastern region of Zimbabwe. J. Land Use Sci. 2016, 11, 384–400. [Google Scholar] [CrossRef]
- Richards, J.A. Remote Sensing Digital Image Analysis: An Introduction, 5th ed.; Springer: Berlin, Germany, 2013; p. 350. [Google Scholar]
- Hao, P.; Zhan, Y.; Wang, L.; Niu, Z.; Shakir, M. Feature selection of time series MODIS data for early crop classification using random forest: A case study in Kansas, USA. Remote Sens. 2015, 7, 5347–5369. [Google Scholar] [CrossRef] [Green Version]
- Phiri, D.; Morgenroth, J. Developments in Landsat land cover classification methods: A review. Remote Sens. 2017, 9, 967. [Google Scholar] [CrossRef] [Green Version]
- Thomlinson, J.R.; Bolstad, P.V.; Cohen, W.B. Coordinating methodologies for scaling landcover classifications from site-specific to global: Steps toward validating global map products. Remote Sens. Environ. 1999, 70, 16–28. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. Use of impervious surface in urban land-use classification. Remote Sens. Environ. 2006, 102, 146–160. [Google Scholar] [CrossRef]
- Chander, G.; Markham, B.L. Revised Landsat-5 TM radiometric calibration procedures, and post-calibration dynamic ranges. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2674–2677. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.G.; Chen, J.K.; Xia, J.S.; Du, P.J.; Zheng, H.R.; Gan, L. Multisource earth observation data for land-cover classification using Random Forest. IEEE Geosci. Remote Sens. Lett. 2018, 15, 789–793. [Google Scholar] [CrossRef]
- Gong, P.; Liu, H.; Zhang, M.; Li, C.; Wang, J.; Huang, H.; Clinton, N.; Ji, L.; Li, W.; Bai, Y.; et al. Stable classification with limited sample: Transferring a 30-m resolution sample set collected in 2015 to mapping 10-m resolution global land cover in 2017. Sci. Bull. 2019, 64, 370–373. [Google Scholar] [CrossRef] [Green Version]
- Franklin, S.E.; Ahmed, O.S.; Wulder, M.A.; White, J.C.; Hermosilla, T.; Coops, N.C. Large area mapping of annual land cover dynamics using multitemporal change detection and classification of Landsat time series data. Can. J. Remote Sens. 2015, 41, 293–314. [Google Scholar] [CrossRef]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef] [Green Version]
- Pasquarella, V.J.; Holden, C.E.; Woodcock, C.E. Improved mapping of forest type using spectral-temporal Landsat features. Remote Sens. Environ. 2018, 210, 193–207. [Google Scholar] [CrossRef]
- Dash, J.; Mathur, A.; Foody, G.M.; Curran, P.J.; Chipman, J.W.; Lillesand, T.M. Land cover classification using multi-temporal MERIS vegetation indices. Int. J. Remote Sens. 2007, 28, 1137–1159. [Google Scholar] [CrossRef] [Green Version]
- Cai, S.; Liu, D. A comparison of object-based and contextual pixel-based classifications using high and medium spatial resolution images. Remote Sens. Lett. 2013, 4, 998–1007. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, Y.Y.; Li, C.C.; Yu, L.; Liu, D.S.; Gong, P. Mapping global land cover in 2001 and 2010 with spatial-temporal consistency at 250 m resolution. ISPRS J. Photogramm. Remote Sens. 2015, 103, 38–47. [Google Scholar] [CrossRef]
- Dannenberg, M.P.; Hakkenberg, C.R.; Song, C.H. Consistent classification of Landsat time series with an improved Automatic Adaptive Signature Generalization Algorithm. Remote Sens. 2016, 8, 691. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Mas, J.F. A comparison of the performance of pixel based and object based classifications over images with various spatial resolutions. Online J. Earth Sci. 2008, 2, 27–35. [Google Scholar]
- Myint, S.W.; Gober, P.; Brazel, A.; Grossman-Clarke, S.; Weng, Q. Per-pixel vs. object-based classification of urban land cover extraction using high spatial resolution imagery. Remote Sens. Environ. 2011, 115, 1145–1161. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.C.; Ma, X.X.; Cheng, L.; Du, P.J.; Liu, Y.X. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Pakhalea, G.K.; Gupta, P.K. Comparison of advanced pixel based (ANN and SVM) and object-oriented classification approaches using Landsat-7 ETM+ data. Int. J. Eng. Technol. 2010, 2, 245–251. [Google Scholar]
- Robertson, D.L.; King, D.J. Comparison of pixel- and object-based classification in land cover change mapping. Int. J. Remote Sens. 2011, 32, 1505–1529. [Google Scholar] [CrossRef]
- Baker, B.A.; Warner, T.A.; Conley, J.F.; McNeil, B.E. Does spatial resolution matter? A multiscale comparison of object-based and pixel-based methods for detecting change associated with gas well drilling operations. Int. J. Remote Sens. 2013, 34, 1633–1651. [Google Scholar] [CrossRef]
- Poursanidis, D.; Chrysoulakis, N.; Mitraka, Z. Landsat 8 vs. Landsat 5: A comparison based on urban and peri-urban land cover mapping. Int. J. Appl. Earth Obs. 2015, 35, 259–269. [Google Scholar] [CrossRef]
- Hossain, M.D.; Chen, D.M. Segmentation for Object-Based Image Analysis (OBIA): A review of algorithms and challenges from remote sensing perspective. ISPRS J. Photogramm. Remote Sens. 2019, 150, 115–134. [Google Scholar] [CrossRef]
- Song, D.-X.; Huang, C.; Sexton, J.O.; Channan, S.; Feng, M.; Townshend, J.R. Use of Landsat and Corona data for mapping forest cover change from the mid-1960s to 2000s: Case studies from the Eastern United States and Central Brazil. ISPRS J. Photogramm. Remote Sens. 2015, 103, 81–92. [Google Scholar] [CrossRef] [Green Version]
- Kindu, M.; Schneider, T.; Teketay, D.; Knoke, T. Land use/land cover change analysis using object-based classification approach in Munessa-Shashemene landscape of the Ethiopian Highlands. Remote Sens. 2013, 5, 2411–2435. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30 m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef] [Green Version]
- Sanchez-Hernandez, C.; Boyd, D.S.; Foody, G.M. One-class classification for mapping a specific land-cover class: SVDD classification of Fenland. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1061–1072. [Google Scholar] [CrossRef] [Green Version]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Zhao, X.; Ye, H. Making Use of the Landsat 7 SLC-off ETM+ Image through Different Recovering Approaches. In Data Acquisition Applications; Karakehayov, Z., Ed.; IntechOpen Limited: London, UK, 2012; pp. 317–342. [Google Scholar]
- He, T.; Liang, S.L.; Wang, D.D.; Cao, Y.F.; Gao, F.; Yu, Y.Y.; Feng, M. Evaluating land surface albedo estimation from Landsat MSS, TM, ETM+, and OLI data based on the unified direct estimation approach. Remote Sens. Environ. 2018, 204, 181–196. [Google Scholar] [CrossRef]
- Yan, L.; Roy, D.P. Improving Landsat multispectral scanner (MSS) geolocation by least-squares-adjustment based time-series co-registration. Remote Sens. Environ. 2021, 252, 112181. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep learning classification of land cover and crop types using remote sensing data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Yoo, C.; Han, D.; Im, J.; Bechtel, B. Comparison between convolutional neural networks and random forest for local climate zone classification in mega urban areas using Landsat images. ISPRS J. Photogramm. Remote Sens. 2019, 157, 155–170. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | L8 OLI | L7 ETM+ | L5 TM | L4 TM | L5 MSS 1 |
|---|---|---|---|---|---|
| Blue | 1975 (2005) 2 | 1970 (1997) | 1958 (1983) | 1958 (1983) | -- |
| Green | 1852 (1821) | 1842 (1812) | 1827 (1796) | 1826 (1795) | 1848 (1824 1) |
| Red | 1570 (1550) | 1547 (1533) | 1551 (1536) | 1554 (1539) | 1588 (1570) |
| NIR | 951 (952) | 1044 (1039) | 1036 (1031) | 1033 (1028) | NIR1: 1235 (1249)NIR2: 856.6 (853.4) |
| SWIR1 | 242.4 (247.6) | 225.7 (230.8) | 214.9 (220.0) | 214.7 (219.8) | -- |
| SWIR2 | 82.47 (85.46) | 82.06 (84.90) | 80.65 (83.44) | 80.70 (83.49) | -- |
| Classifier | ||||||||
|---|---|---|---|---|---|---|---|---|
| MLC | SAM | LR | KNN | DT | SVM 1 | RF | ANN | |
| MSS | less | less | less | less | less | less | less | less |
| ETM+ | equal | greater | equal | greater | equal | greater | equal | greater |
| OLI | less | less | less | equal | equal | greater | greater | equal |
| Cn | Cm | Gt | Sn | Sm | Sc | Ws | |
|---|---|---|---|---|---|---|---|
| Cn | -- | 0.60 | 1.98 | 0.68 | 0.50 | 0.29 | 2.00 |
| Cm | 1.29 (0.46) 1 | -- | 2.00 | 0.53 | 0.32 | 0.69 | 2.00 |
| Gt | 2.00 (1.98) | 2.00 (1.99) | -- | 1.99 | 2.00 | 1.99 | 1.99 |
| Sn | 1.05 (0.53) | 1.50 (0.45) | 2.00 (1.99) | -- | 0.16 | 0.72 | 2.00 |
| Sm | 0.84 (0.43) | 0.70 (0.26) | 2.00 (1.99) | 1.01 (0.16) | -- | 0.59 | 2.00 |
| Sc | 1.41 (0.28) | 0.93 (0.51) | 2.00 (1.96) | 1.52 (0.56) | 1.04 (0.53) | -- | 2.00 |
| Ws | 2.00 (2.00) | 2.00 (2.00) | 1.99 (1.96) | 2.00 (2.00) | 2.00 (2.00) | 2.00 (2.00) | -- |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, F.; Wang, C.; Zhang, Y.; Yi, Z.; Fan, Q.; Liu, L.; Song, Y. Inconsistency among Landsat Sensors in Land Surface Mapping: A Comprehensive Investigation Based on Simulation. Remote Sens. 2021, 13, 1383. https://doi.org/10.3390/rs13071383
Chen F, Wang C, Zhang Y, Yi Z, Fan Q, Liu L, Song Y. Inconsistency among Landsat Sensors in Land Surface Mapping: A Comprehensive Investigation Based on Simulation. Remote Sensing. 2021; 13(7):1383. https://doi.org/10.3390/rs13071383
Chicago/Turabian StyleChen, Feng, Chenxing Wang, Yuansheng Zhang, Zhenshi Yi, Qiancong Fan, Lin Liu, and Yuejun Song. 2021. "Inconsistency among Landsat Sensors in Land Surface Mapping: A Comprehensive Investigation Based on Simulation" Remote Sensing 13, no. 7: 1383. https://doi.org/10.3390/rs13071383
APA StyleChen, F., Wang, C., Zhang, Y., Yi, Z., Fan, Q., Liu, L., & Song, Y. (2021). Inconsistency among Landsat Sensors in Land Surface Mapping: A Comprehensive Investigation Based on Simulation. Remote Sensing, 13(7), 1383. https://doi.org/10.3390/rs13071383