
Robust Controller for Pursuing Trajectory and Force Estimations of a Bilateral Tele-Operated Hydraulic Manipulator




Abstract
:1. Introduction
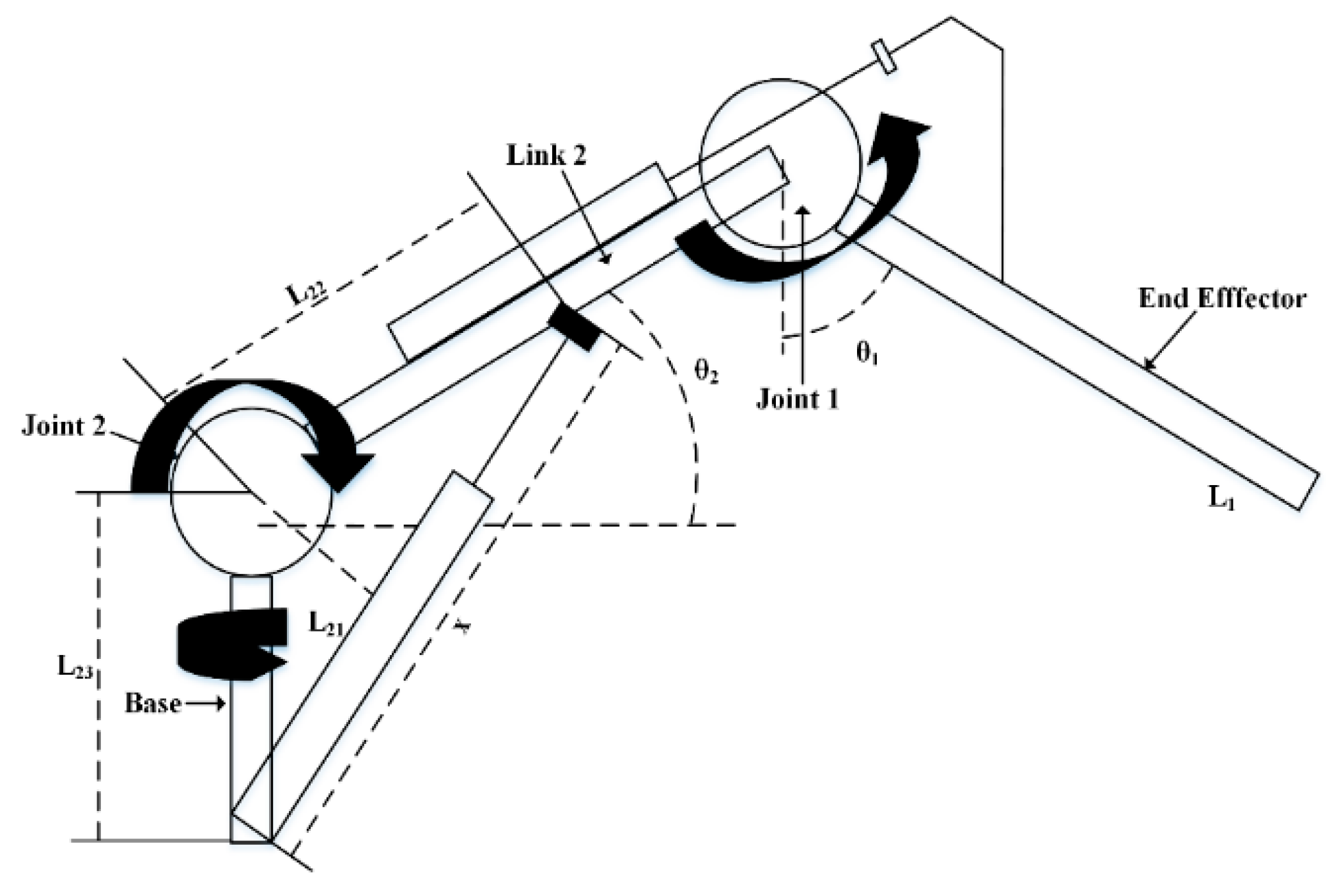
2. Dynamics of the Hydraulic Manipulator
3. Terminal Sliding Mode Control with Sliding Perturbation Observer (TSMCSPO)
3.1. Terminal Sliding Mode Control (TSMC)
3.2. Sliding Perturbation Observer (SPO)
3.3. Terminal Sliding Mode Control with Sliding Perturbation Observer (TSMCSPO)
3.4. Design Procedure of TSMCSPO
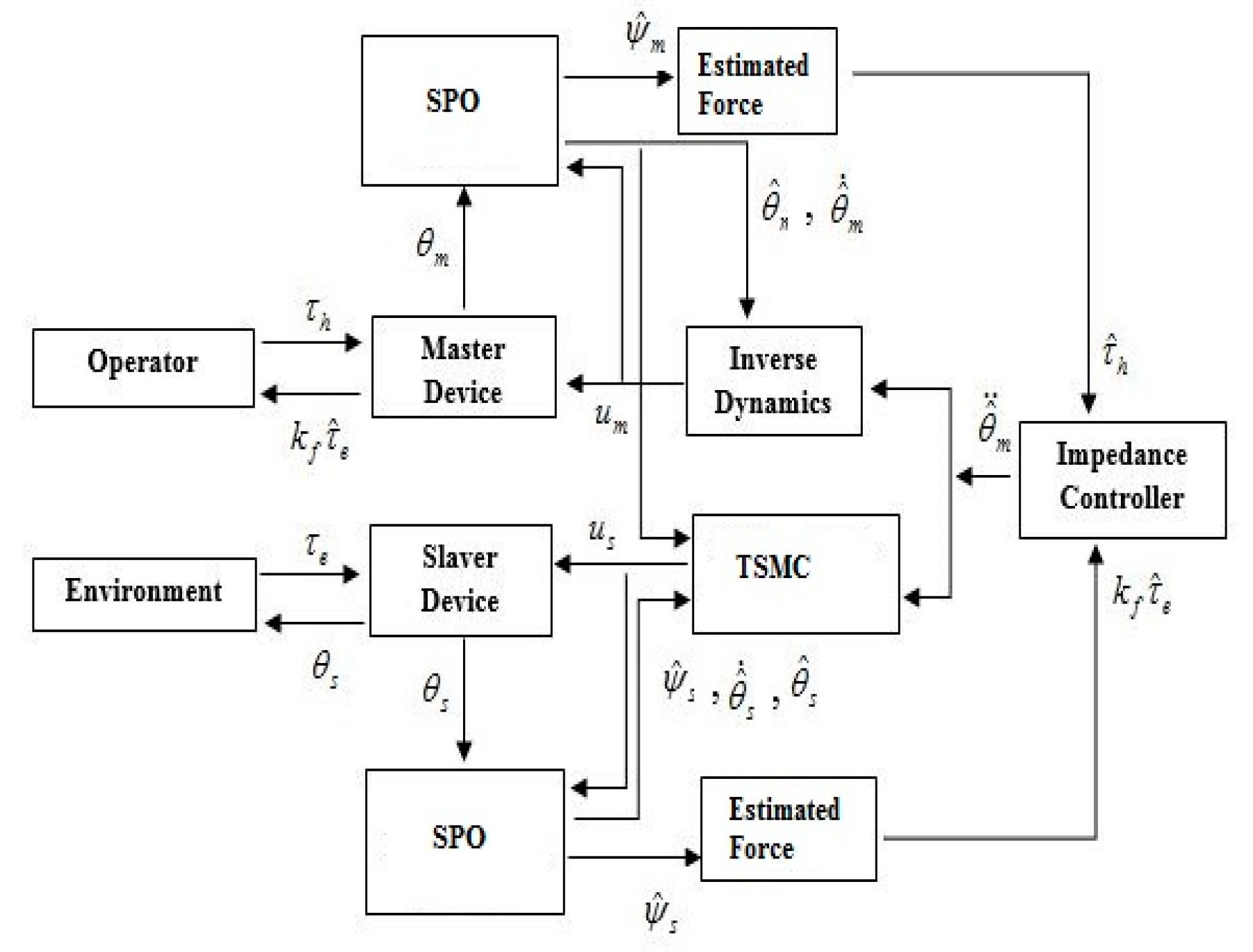
4. Bilateral Tele-Operation Control between Leader and Follower
4.1. Bilateral Tele-Operation Control
4.2. Bilateral Control
4.3. Estimation of Reaction Force Using a Sliding Perturbation Observer (SPO)
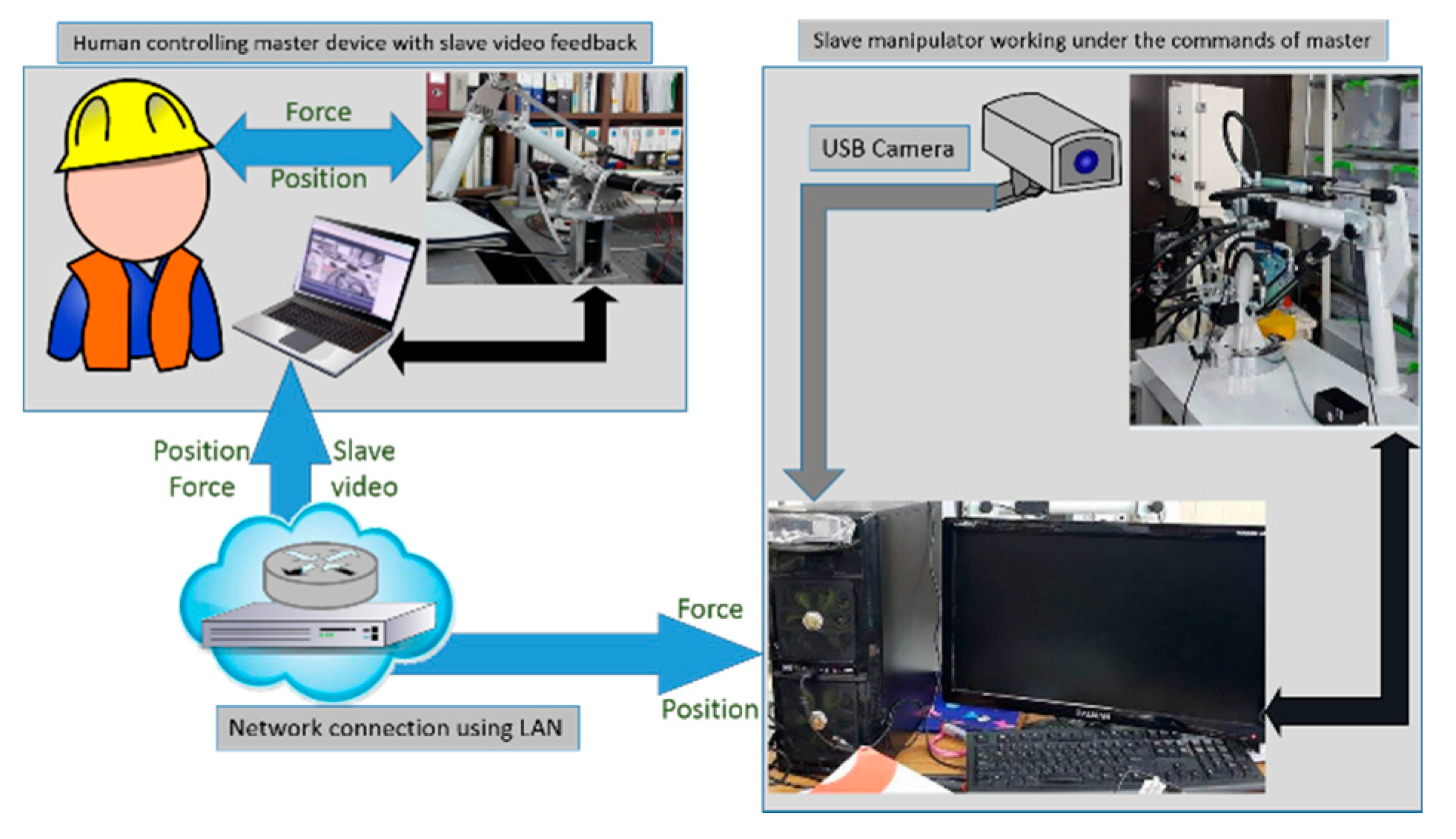
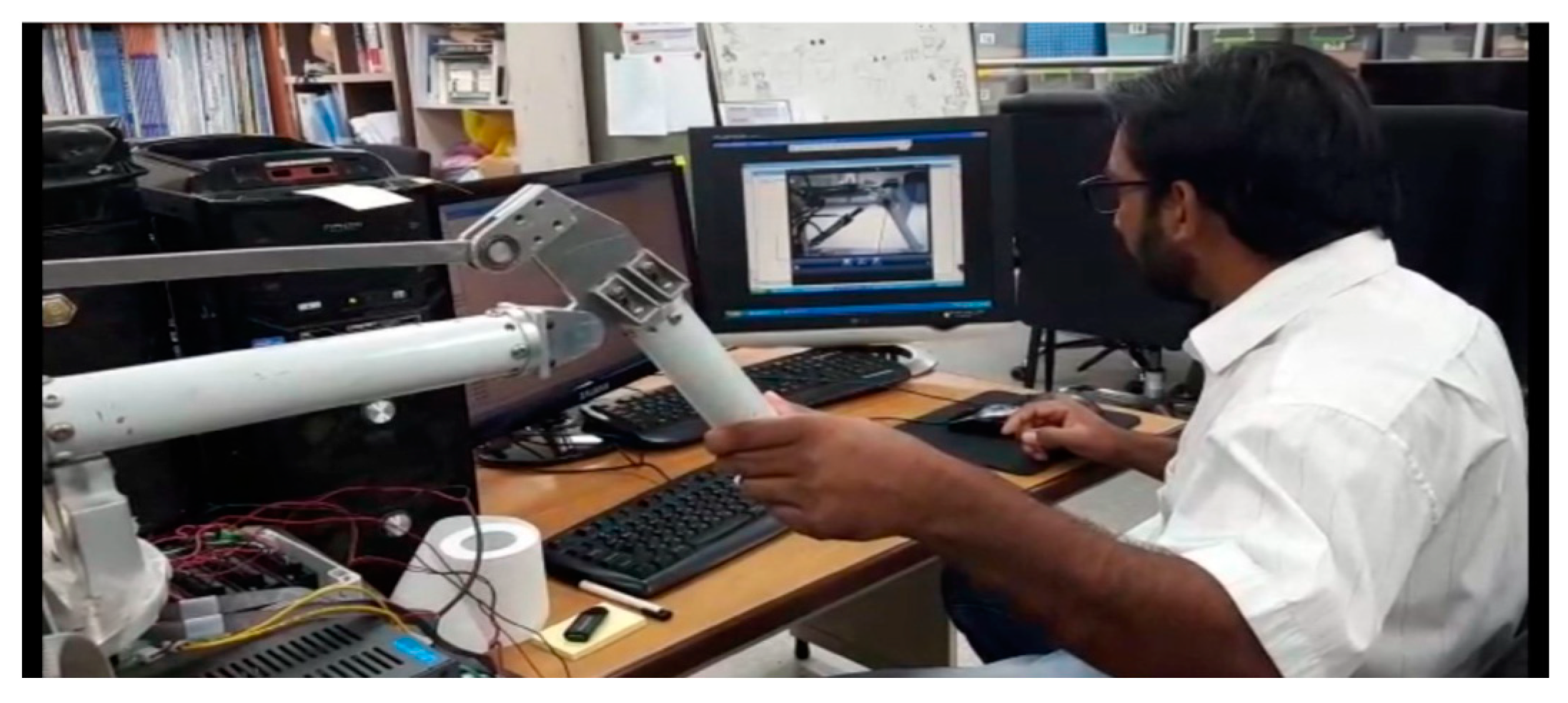
5. Internet-Based Experimental Setup
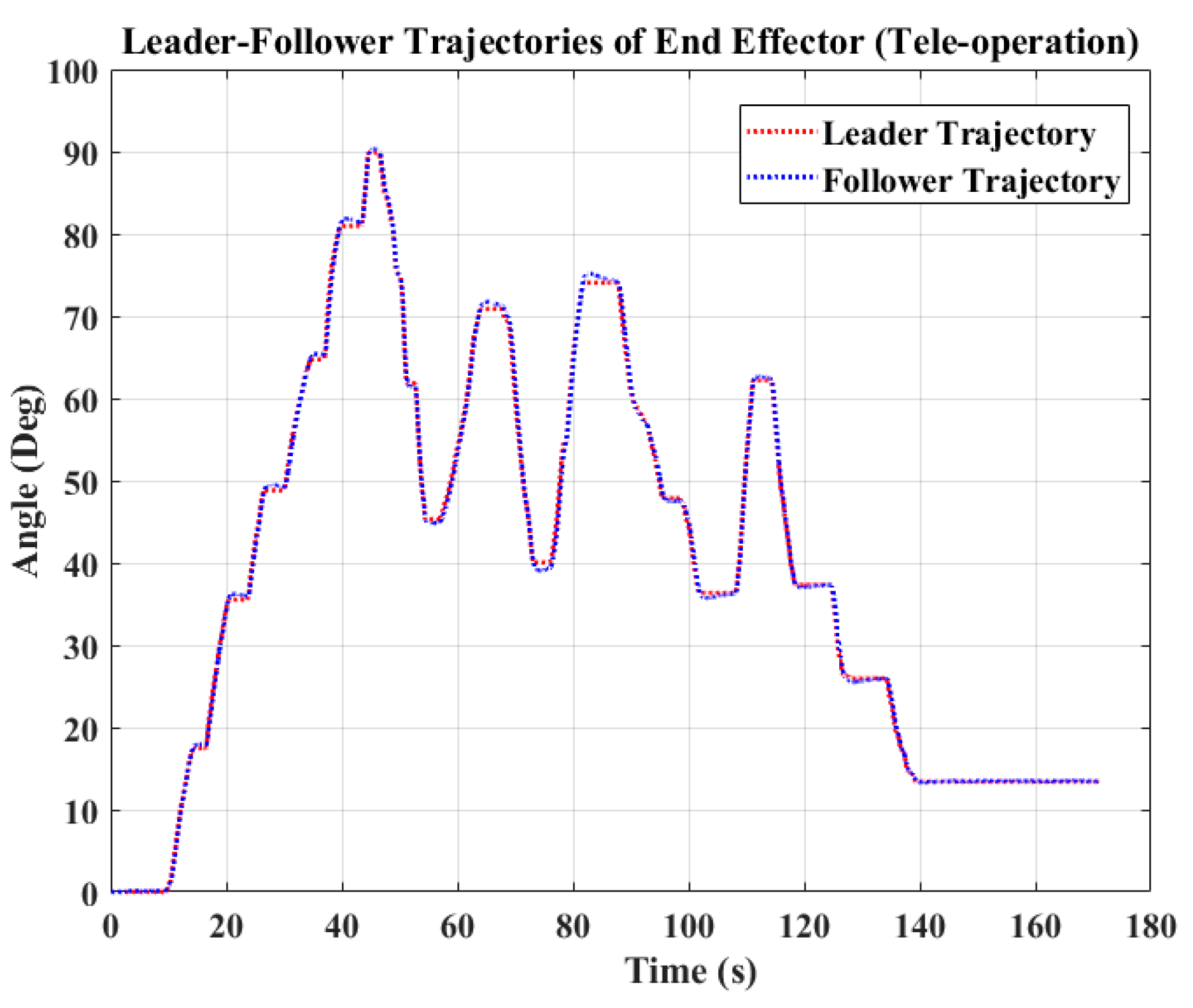
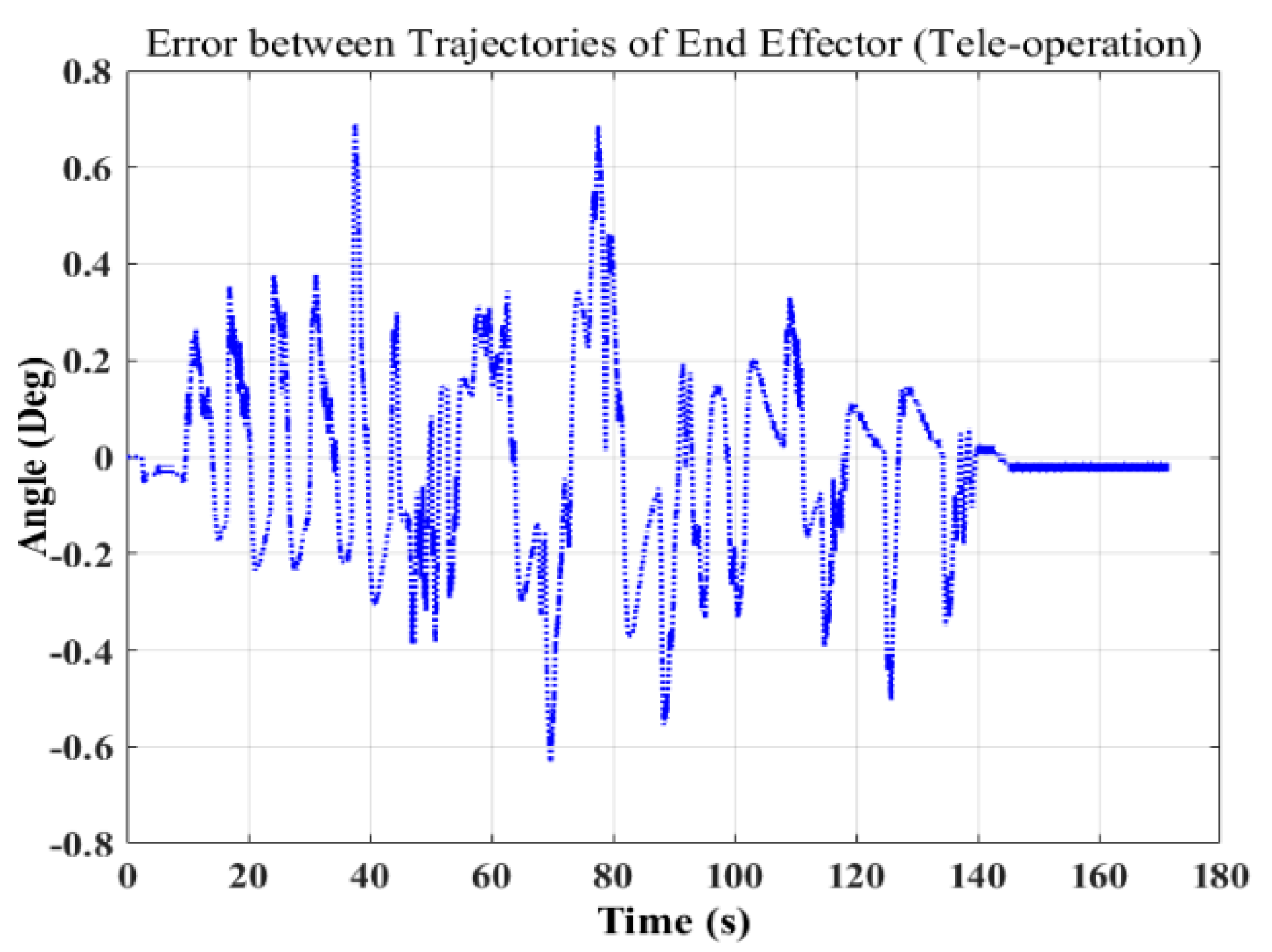
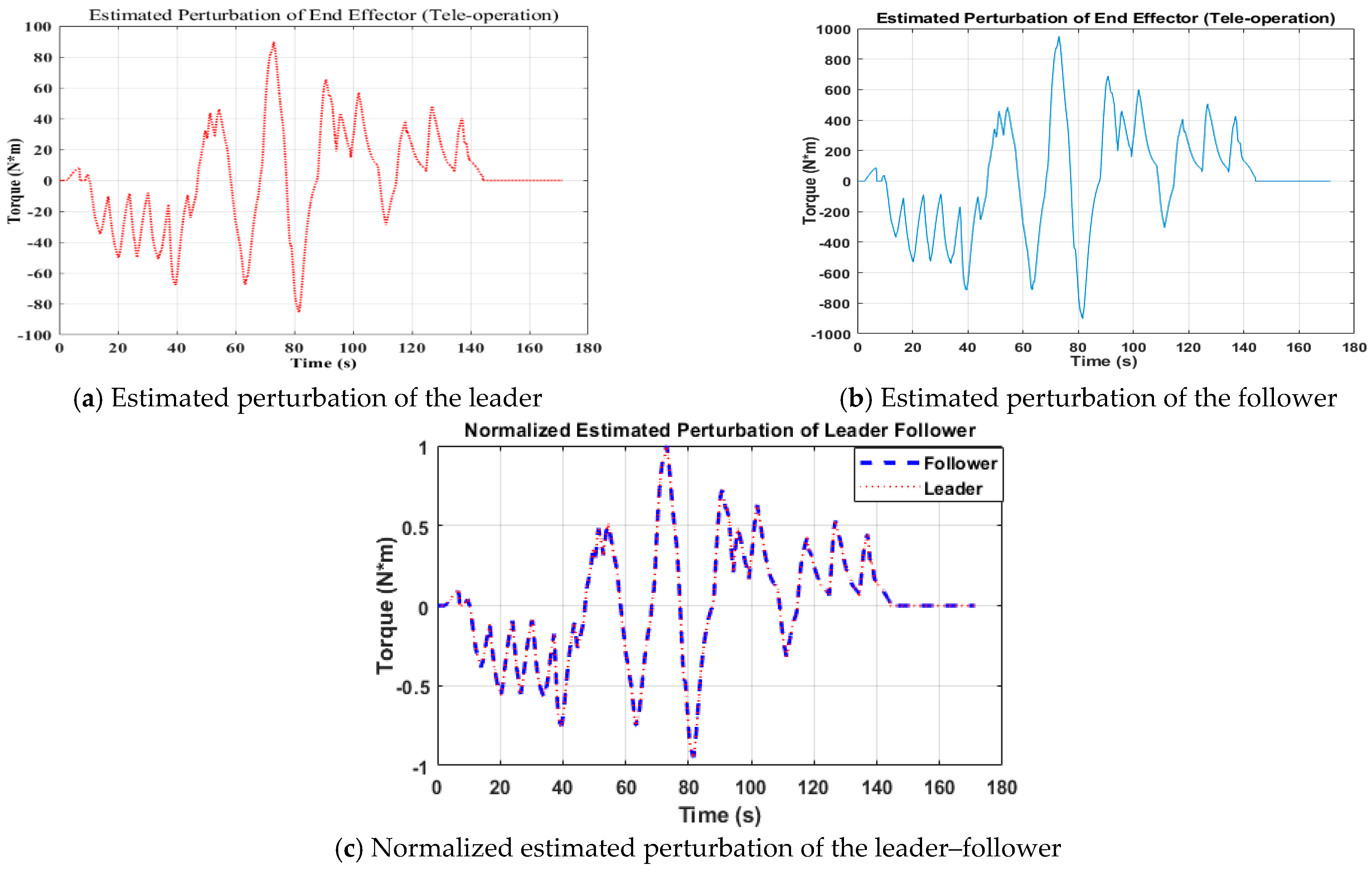
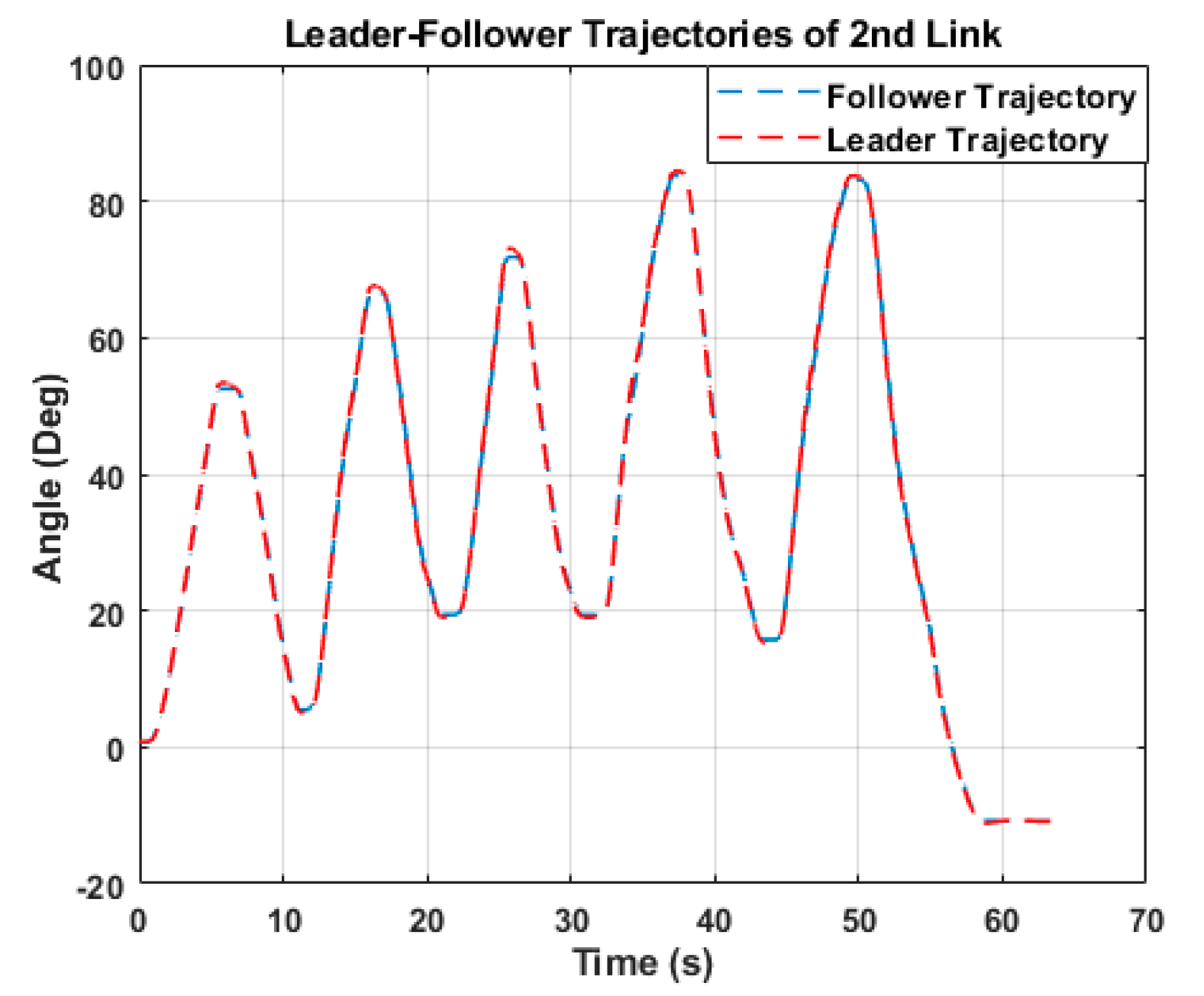
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Locatelli, G.; Mancini, M. A Framework for the Selection of the Right Nuclear Power Plant. Int. J. Prod. Res. 2011, 50, 4753–4766. [Google Scholar] [CrossRef]
- Kamada, N.; Saito, O.; Endo, S.; Kimura, A.; Shizuma, K. Radiation doses among residents living 37 km northwest of the Fukushima Dai-ichi Nuclear Power Plant. J. Environ. Radioact. 2012, 110, 84–89. [Google Scholar] [CrossRef]
- Khan, H.; Abbasi, S.J.; Kallu, K.D.; Lee, M.C. Robust control design of 6-DOF robot for nuclear power plant dismantling. In Proceedings of the 2019 International Conference on Robotics and Automation in Industry (ICRAI), Rawalpindi, Pakistan, 21–22 October 2019; pp. 1–7. [Google Scholar]
- Tsitsimpelis, I.; Taylor, C.J.; Lennox, B.; Joyce, M.J. A review of ground-based robotic systems for the characterization of nuclear environments. Prog. Nucl. Energy 2019, 111, 109–124. [Google Scholar] [CrossRef]
- Mallion, A.; Wilson, C.; Smith, R.; Ferguson, G.; Roberts, R.; Hilton, P. LaserSnake2: An Innovative Approach to Nuclear Decommissioning-17080; WM Symposia, Inc.: Tempe, AZ, USA, 2017. [Google Scholar]
- Freschi, C.; Ferrari, V.; Melfi, F.; Ferrari, M.; Mosca, F.; Cuschieri, A. Technical review of the da Vinci surgical telemanipulator. Int. J. Med Robot. Comput. Assist. Surg. 2013, 9, 396–406. [Google Scholar] [CrossRef] [PubMed]
- Baser, O.; Konukseven, E.I. Utilization of motor current based torque feedback to improve the transparency of haptic interfaces. Mech. Mach. Theory 2012, 52, 78–93. [Google Scholar] [CrossRef]
- Lovasz, E.-C.; Mărgineanu, D.T.; Ciupe, V.; Maniu, I.; Gruescu, C.M.; Zăbavă, E.S.; Stan, S.D. Design and control solutions for haptic elbow exoskeleton module used in space telerobotics. Mech. Mach. Theory 2017, 107, 384–398. [Google Scholar] [CrossRef]
- Ozaki, H.; Mohri, A.; Takata, M. On the force feedback control of a manipulator with a compliant wrist force sensor. Mech. Mach. Theory 1983, 18, 57–62. [Google Scholar] [CrossRef]
- Yip, M.C.; Yuen, S.G.; Howe, R.D. A Robust Uniaxial Force Sensor for Minimally Invasive Surgery. IEEE Trans. Biomed. Eng. 2010, 57, 1008–1011. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Puangmali, P.; Liu, H.; Seneviratne, L.D.; Dasgupta, P.; Althoefer, K. Miniature 3-axis distal force sensor for minimally invasive surgical palpation. IEEE ASME Trans. Mechatron. 2011, 17, 646–656. [Google Scholar] [CrossRef]
- Kang, J.S.; Lee, M.C.; Yoon, S.M. Bilateral control based rupture protection method in surgical robot using improved leader device. Int. J. Control Autom. Syst. 2016, 14, 1073–1080. [Google Scholar] [CrossRef]
- Peñaloza-Mejía, O.; Márquez-Martínez, L.A.; Alvarez-Gallegos, J.; Alvarez, J. Leader-follower teleoperation of underactuated mechanical systems with communication delays. Int. J. Control Autom. Syst. 2017, 15, 827–836. [Google Scholar] [CrossRef]
- Murakami, T.; Yu, F.; Ohnishi, K. Torque sensorless control in multidegree-of-freedom manipulator. IEEE Trans. Ind. Electron. 1993, 40, 259–265. [Google Scholar] [CrossRef]
- Katsura, S.; Matsumoto, Y.; Ohnishi, K. Modeling of force sensing and validation of disturbance observer for force control. IEEE Trans. Ind. Electron. 2004, 54, 530–538. [Google Scholar] [CrossRef]
- Tadano, K.; Kawashima, K. Development of 4-DOFs forceps with force sensing using pneumatic servo system. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 2250–2255. [Google Scholar]
- Smith, A.C.; Mobasser, F.; Hashtrudi-Zaad, K. Neural-network-based contact force observers for haptic applications. IEEE Trans. Robot. 2006, 22, 1163–1175. [Google Scholar] [CrossRef]
- Mitsantisuk, C.; Ohishi, K.; Katsura, S. Estimation of action/reaction forces for the bilateral control using Kalman filter. IEEE Trans. Ind. Electron. 2011, 59, 4383–4393. [Google Scholar] [CrossRef]
- Aviles, A.I.; Alsaleh, S.M.; Hahn, J.K.; Casals, A. Towards Retrieving Force Feedback in Robotic-Assisted Surgery: A Supervised Neuro-Recurrent-Vision Approach. IEEE Trans. Haptics 2017, 10, 431–443. [Google Scholar] [CrossRef] [Green Version]
- Kallu, K.D.; Jie, W.; Lee, M.C. Sensorless reaction force estimation of the end effector of a dual-arm robot manipulator using sliding mode control with a sliding perturbation observer. Int. J. Control Autom. Syst. 2018, 16, 1367–1378. [Google Scholar] [CrossRef]
- Kallu, K.D.; Abbasi, S.J.; Lee, M.C. Estimation force of leader-follower for the end effector of hydraulic servo system using SMCSPO. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 1665–1668. [Google Scholar]
- Dad, K.; Jie, W.; Abbasi, S.J.; Lee, M.C. Reaction force estimation and bilateral control of leader follower manipulation using a robust controller. In Proceedings of the 2017 10th International Conference on Human System Interactions (HSI), Ulsan, Korea, 17–19 July 2017; pp. 178–181. [Google Scholar]
- Kallu, K.D.; Abbasi, S.J.; Lee, M.C. Bilateral control of hydraulic servo system for end-effector of leader-follower manipulators. In Proceedings of the 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Miyazaki, Japan, 19–22 January 2017; pp. 284–287. [Google Scholar]
- Jie, W.; Dad, K.; Lee, M.C. A reaction force estimation method of end effector of two-link manipulator using SMCSPO. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 869–872. [Google Scholar]
- Jie, W.; Dad, K.; Lee, M.-C. SMCSPO based force estimation for a hydraulic cylinder. In Proceedings of the 2017 17th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 18–21 October 2017; pp. 1422–1425. [Google Scholar]
- Kallu, K.D.; Abbasi, S.J.; Yaqub, M.A.; Lee, M.C. Tele-operated bilateral control of hydraulic servo system using estimated reaction force of end effector by SMCSPO. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 57–62. [Google Scholar]
- Martinez, D.I.; De Rubio, J.J.; Vargas, T.M.; Garcia, V.; Ochoa, G.; Balcazar, R.; Cruz, D.R.; Aguilar, A.; Novoa, J.F.; Aguilar-Ibanez, C. Stabilization of Robots With a Regulator Containing the Sigmoid Mapping. IEEE Access 2020, 8, 89479–89488. [Google Scholar] [CrossRef]
- Escobedo-Alva, J.O.; Garcia-Estrada, E.C.; Paramo-Carranza, L.A.; Meda-Campana, J.A.; Tapia-Herrera, R. Theoretical application of a hybrid observer on altitude tracking of quadrotor losing GPS signal. IEEE Access 2018, 6, 76900–76908. [Google Scholar] [CrossRef]
- Aguilar-Ibanez, C.; Suarez-Castanon, M.S. A Trajectory Planning Based Controller to Regulate an Uncertain 3D Overhead Crane System. Int. J. Appl. Math. Comput. Sci. 2019, 29, 693–702. [Google Scholar] [CrossRef] [Green Version]
- García-Sánchez, J.R.; Tavera-Mosqueda, S.; Silva-Ortigoza, R.; Hernández-Guzmán, V.M.; Sandoval-Gutiérrez, J.; Marcelino-Aranda, M.; Taud, H.; Marciano-Melchor, M. Robust Switched Tracking Control for Wheeled Mobile Robots Considering the Actuators and Drivers. Sensors 2018, 18, 4316. [Google Scholar] [CrossRef] [Green Version]
- Amini, H.; Dabbagh, V.; Rezaei, S.; Zareinejad, M.; Mardi, N.; Sarhan, A.A. Robust control-based linear bilateral teleoperation system without force sensor. J. Braz. Soc. Mech. Sci. Eng. 2015, 37, 579–587. [Google Scholar] [CrossRef]
- Cao, C.; Wang, F.; Cao, Q.; Sun, H.; Xu, W.; Cui, M. Neural network–based terminal sliding mode applied to position/force adaptive control for constrained robotic manipulators. Adv. Mech. Eng. 2018, 10, 1687814018781288. [Google Scholar] [CrossRef] [Green Version]
- Dinh, T.X.; Tran, T.; Anh, T.H.V.; Ahn, K.K. Disturbance Observer Based Finite Time Trajectory Tracking Control for a 3 DOF Hydraulic Manipulator Including Actuator Dynamics. IEEE Access 2018, 6, 36798–36809. [Google Scholar] [CrossRef]
- Rahmani, M.; Rahman, M.H. Novel robust control of a 7-DOF exoskeleton robot. PLoS ONE 2018, 13, e0203440. [Google Scholar] [CrossRef] [PubMed]
- Vo, A.T.; Kang, H.-J. An Adaptive Terminal Sliding Mode Control for Robot Manipulators with Non-Singular Terminal Sliding Surface Variables. IEEE Access 2019, 7, 8701–8712. [Google Scholar] [CrossRef]
- Han, S.I.; Lee, J. Finite-time sliding surface constrained control for a robot manipulator with an unknown deadzone and disturbance. ISA Trans. 2016, 65, 307–318. [Google Scholar] [CrossRef]
- Wang, J.; Lee, M.C.; Kallu, K.D.; Abbasi, S.J.; Ahn, S. Trajectory Tracking Control of a Hydraulic System Using TSMCSPO based on Sliding Perturbation Observer. Appl. Sci. 2019, 9, 1455. [Google Scholar] [CrossRef] [Green Version]
- Elmali, H.; Olgac, N. Sliding mode control with perturbation estimation (SMCPE): A new approach. Int. J. Control 1992, 56, 923–941. [Google Scholar] [CrossRef]
- Moura, J.T.; Elmali, H.; Olgac, N. Sliding Mode Control with Sliding Perturbation Observer. J. Dyn. Syst. Meas. Control. 1997, 119, 657–665. [Google Scholar] [CrossRef]
- Slotine, J.-J.; Sastry, S.S. Tracking control of non-linear systems using sliding surfaces, with application to robot manipulators. Int. J. Control 1983, 38, 465–492. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| (End effector) | 25 |
| (2nd Link) | 250 |
| (Base) | 8 |
| 39 | |
| 507 | |
| 1 | |
| 13 | |
| 1 | |
| (End effector) | 4.08 |
| (2nd Link) | 10 |
| (Base) | 2.58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kallu, K.D.; Zafar, A.; Ali, M.U.; Ahmed, S.; Lee, M.C. Robust Controller for Pursuing Trajectory and Force Estimations of a Bilateral Tele-Operated Hydraulic Manipulator. Remote Sens. 2021, 13, 1648. https://doi.org/10.3390/rs13091648
Kallu KD, Zafar A, Ali MU, Ahmed S, Lee MC. Robust Controller for Pursuing Trajectory and Force Estimations of a Bilateral Tele-Operated Hydraulic Manipulator. Remote Sensing. 2021; 13(9):1648. https://doi.org/10.3390/rs13091648
Chicago/Turabian StyleKallu, Karam Dad, Amad Zafar, Muhammad Umair Ali, Shahzad Ahmed, and Min Cheol Lee. 2021. "Robust Controller for Pursuing Trajectory and Force Estimations of a Bilateral Tele-Operated Hydraulic Manipulator" Remote Sensing 13, no. 9: 1648. https://doi.org/10.3390/rs13091648
APA StyleKallu, K. D., Zafar, A., Ali, M. U., Ahmed, S., & Lee, M. C. (2021). Robust Controller for Pursuing Trajectory and Force Estimations of a Bilateral Tele-Operated Hydraulic Manipulator. Remote Sensing, 13(9), 1648. https://doi.org/10.3390/rs13091648