
Drone-Based Community Assessment, Planning, and Disaster Risk Management for Sustainable Development


 and
and
Abstract
:1. Introduction and Motivation
2. Drone-Based Data Collection and Analysis
2.1. Motivational Forces in Disaster Risk Management
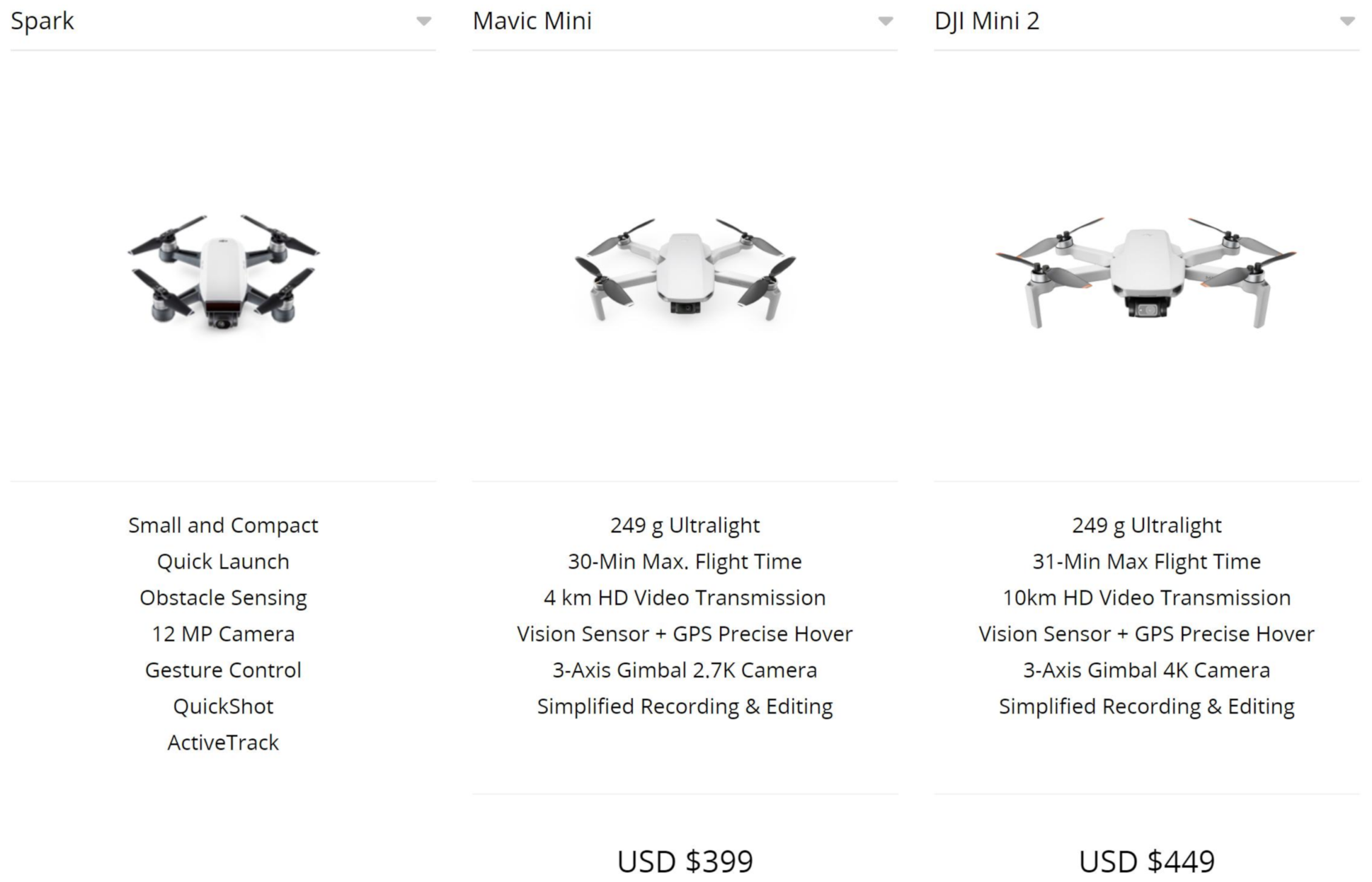
2.2. Down-Sized and Low-Cost Drone Technology
2.3. Machine Learning with Drone Imagery
3. The Soil and Water Assessment Tool (SWAT) in Urban-Scale Flood Modeling
4. Data Collection and Registration
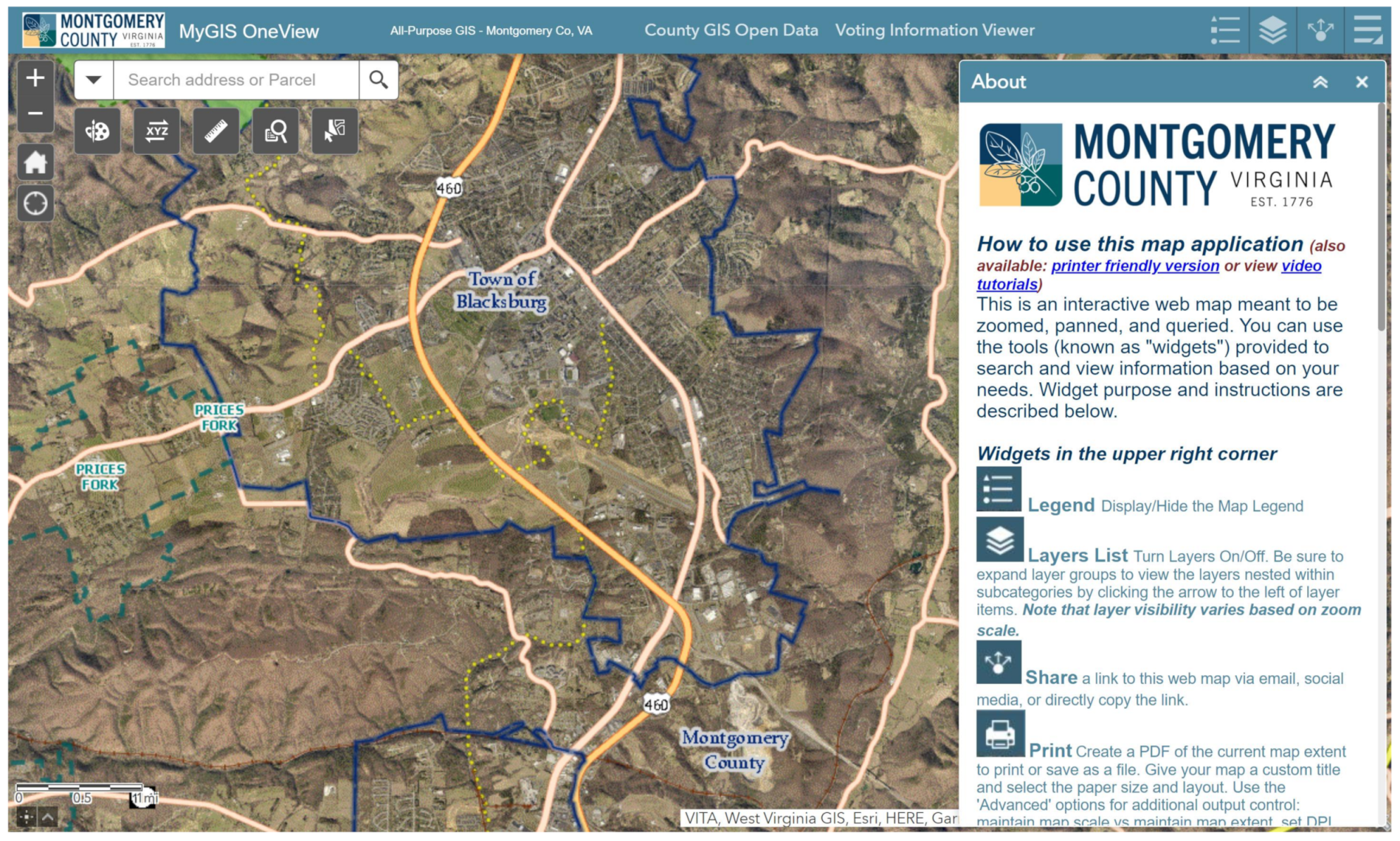
4.1. Cadastre Systems and Data
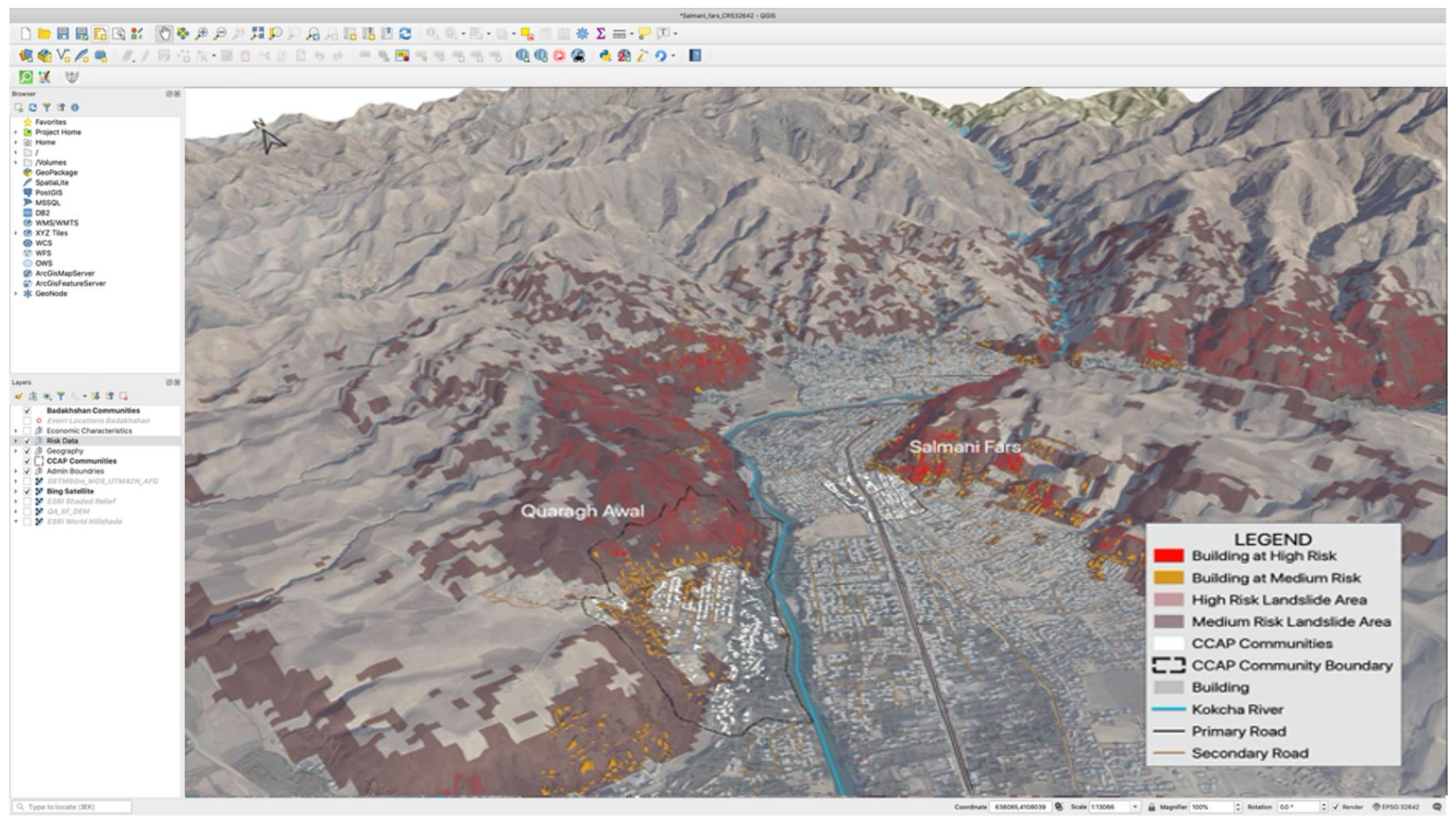
4.2. Natural Disaster Risk Applications and Data
4.3. 3D Modeling
4.4. Contextualizing 3D Models with Cadastre and Risk Data
5. SWAT Modeling and Hydrology Modeling
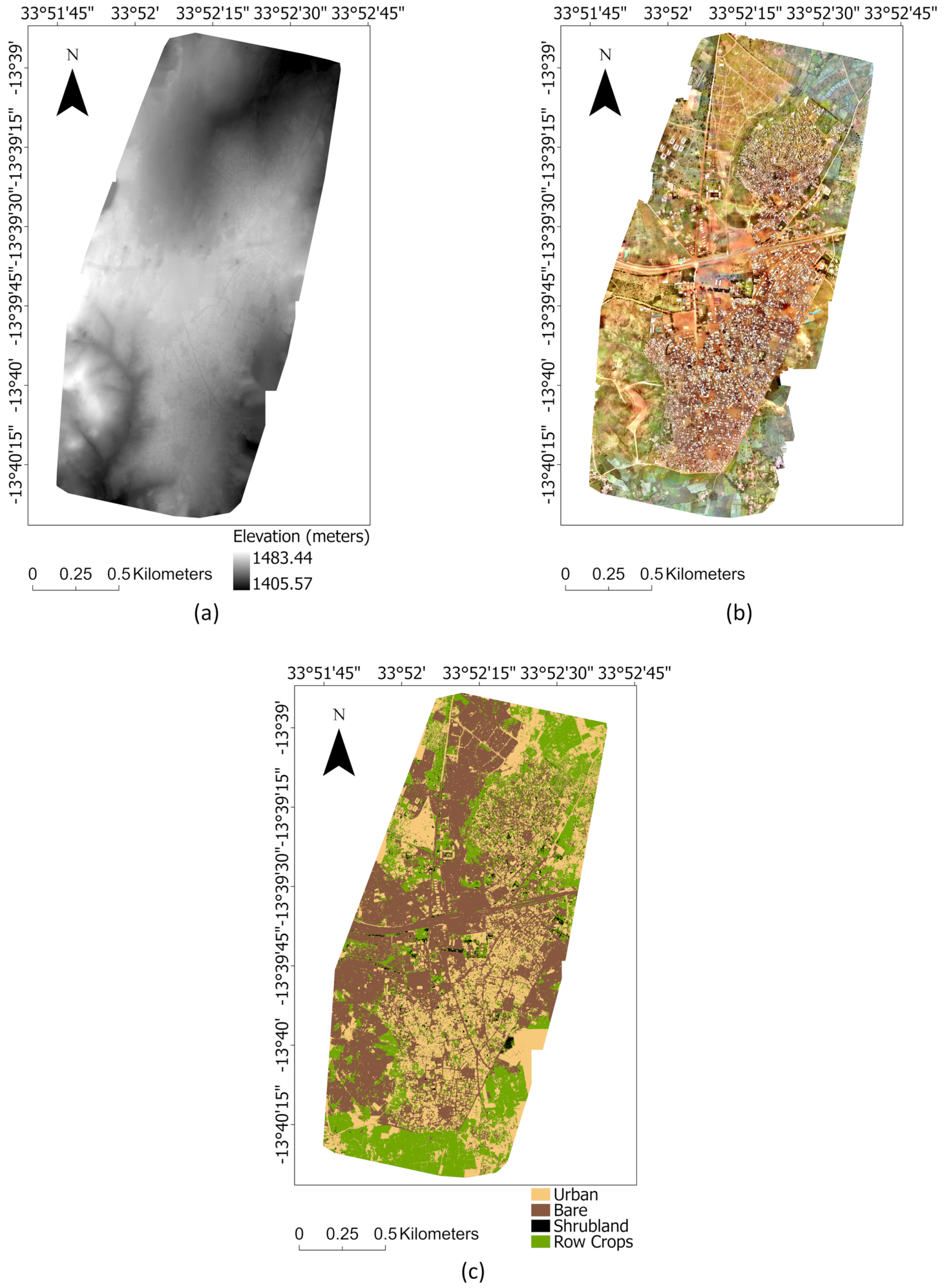
5.1. Dzaleka Refugee Camp Data Collection and Initial Flood Model
5.2. Drone Imagery Used to Enhance Initial Flood Model
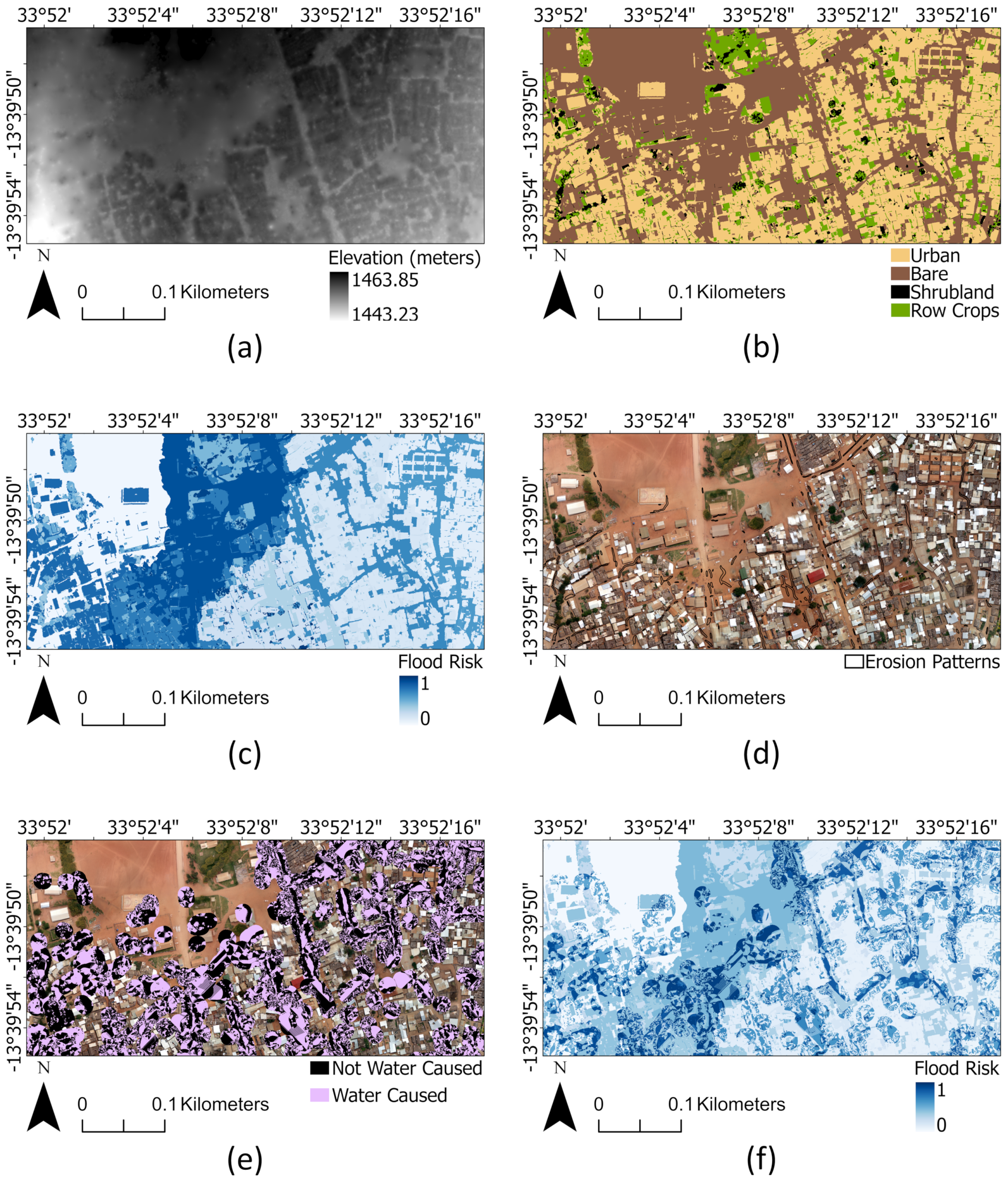
5.3. Analysis of a Small Study Area within Dzaleka Refugee Camp
5.4. Relating Roof Type to Flood Risk
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Molinario, G.; Deparday, V. Demystifying Machine Learning for Disaster Risk Management. 2019. Available online: https://blogs.worldbank.org/opendata/demystifying-machine-learning-disaster-risk-management (accessed on 5 April 2021).
- A Safer, More Resilient World: Reducing Disaster Risks with AI. 2020. Available online: https://www.itu.int/en/myitu/News/2020/10/20/14/54/AI-for-Good-Disaster-Risk-Reduction-artificial-intelligence (accessed on 5 April 2021).
- Masey, L. Disaster Risk Reduction: How Big Data Plays a Role in Its Ambiguity. 2020. Available online: http://sites.utexas.edu/climatesecurity/2020/03/01/big-data-and-what-it-means-for-action/ (accessed on 5 April 2021).
- PreventionWeb. Datasets—Understanding Disaster Risk Data. 2015. Available online: https://www.preventionweb.net/risk/datasets (accessed on 5 April 2021).
- Disaster Risk Management. 2020. Available online: https://www.worldbank.org/en/topic/disasterriskmanagement/overview (accessed on 5 April 2021).
- Drones for Hazard Assessment and Disaster Management. 2019. Available online: https://www.akdn.org/press-release/drones-hazard-assessment-and-disaster-management (accessed on 5 April 2021).
- sUASNews. PIX4D Mapping Nepal: Drones and the Future of Disaster Response. 2015. Available online: https://www.suasnews.com/2015/11/pix4d-mapping-nepal-drones-and-the-future-of-disaster-response/ (accessed on 5 April 2021).
- NOAA National Centers for Environmental Information (NCEI) U.S. Billion-Dollar Weather and Climate Disasters. 2021. Available online: https://www.ncdc.noaa.gov/billions/ (accessed on 5 April 2021). [CrossRef]
- Who Owns What? 2020. Available online: https://www.economist.com/leaders/2020/09/12/who-owns-what (accessed on 5 April 2021).
- Drones for Land Clarification and the Empowerment of Women. Global knowledge, Cities Alliance. 2020. Available online: https://www.citiesalliance.org/sites/default/files/2020-09/Rapport_final_IRDAC_2020_EN_0.pdf (accessed on 8 March 2021).
- Daftry, S.; Hoppe, C.; Bischof, H. Building with drones: Accurate 3D facade reconstruction using MAVs. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), New York, NY, USA, 26–30 May 2015; pp. 3487–3494. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.; Dong, Y.; Wang, D.; Chen, A.; Ye, Z. Three-Dimensional Reconstruction of Structural Surface Model of Heritage Bridges Using UAV-Based Photogrammetric Point Clouds. Remote Sens. 2019, 11, 1204. [Google Scholar] [CrossRef] [Green Version]
- DrivenData. Open Cities AI Challenge: Segmenting Buildings for Disaster Resilience. 2020. Available online: https://github.com/drivendataorg/open-cities-ai-challenge/ (accessed on 8 March 2021).
- Drone Mapping Software—OpenDroneMap. 2021. Available online: https://www.opendronemap.org/ (accessed on 8 March 2021).
- SWAT: Soil and Water Assessment Tool. Available online: https://swat.tamu.edu/ (accessed on 8 March 2021).
- Picterra—Geospatial Imagery Analysis Made Easy. Available online: https://picterra.ch/ (accessed on 8 March 2021).
- Here are the World’s Largest Drone Companies and Manufacturers to Watch. 2020. Available online: https://www.businessinsider.com/drone-manufacturers-companies-invest-stocks (accessed on 22 February 2021).
- Schulman, B. Why Did DJI Create a 249-Gram Drone? 2019. Available online: https://content.dji.com/why-did-dji-create-a-249-gram-drone/ (accessed on 22 February 2021).
- DJI. Consumer Drones Comparison. Available online: https://www.dji.com/products/comparison-consumer-drones (accessed on 22 February 2021).
- Camera Module V2. Available online: https://www.raspberrypi.org/products/camera-module-v2/ (accessed on 22 February 2021).
- Oborne, M. Mission Planner. Available online: https://github.com/ArduPilot/MissionPlanner (accessed on 1 March 2021).
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the 2017 International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Saha, S. A Comprehensive Guide to Convolutional Neural Networks—The ELI5 Way. 2018. Available online: https://towardsdatascience.com/a-comprehensive-guide-to-convolutional-neural-networks-the-eli5-way-3bd2b1164a53 (accessed on 19 April 2021).
- Dickson, B. What are Convolutional Neural Networks (CNN)? 2020. Available online: https://bdtechtalks.com/2020/01/06/convolutional-neural-networks-cnn-convnets/ (accessed on 19 April 2021).
- TensorFlow. Available online: https://github.com/tensorflow/tensorflow (accessed on 19 April 2021).
- PyTorch. Available online: https://github.com/pytorch/pytorch (accessed on 19 April 2021).
- Picterra—Frequently Asked Questions. 2021. Available online: https://picterra.ch/faq/ (accessed on 19 April 2021).
- Industry Applications—Picterra. 2021. Available online: https://picterra.ch/applications/ (accessed on 19 April 2021).
- Fong, R. Deep Learning Approach for Building Detection. 2020. Available online: https://picterra.ch/blog/deep-learning-approach-for-building-detection/ (accessed on 19 April 2021).
- Neitsch, S.L.; Arnold, J.; Kiniry, J.R.; Williams, J.R. Soil and Water Assessemt Tool Theoretical Documentation Version 2009. In Texas Water Resources Institute Technical Report 406; Texas A&M University System: College Station, TX, USA, 2011. [Google Scholar]
- Baker, T.; Miller, S. Using the Soil and Water Assessment Tool (SWAT) to assess land use impact on water resources in an East African watershed. J. Hydrol. 2013, 486, 100–111. [Google Scholar] [CrossRef]
- Ghaffari, G.; Keesstra, S.; Ghodousi, J.; Ahmadi, H. SWAT-simulated hydrological impact of land-use change in the Zanjanrood basin, Northwest Iran. Hydrol. Process. 2010, 24, 892–903. [Google Scholar] [CrossRef]
- Aawar, T.; Khare, D. Assessment of climate change impacts on streamflow through hydrological model using SWAT model: A case study of Afghanistan. Model. Earth Syst. Environ. 2020, 6, 1427–1437. [Google Scholar] [CrossRef]
- Van Liew, M.; Arnold, J.; Garbrecht, J. Hydrologic Simulation on Agricultural Watersheds: Choosing Between Two Models. Am. Soc. Agric. Biol. Eng. 2003, 46, 1539–1551. [Google Scholar] [CrossRef]
- Borah, D.; Bera, M. Watershed-Scale Hydrologic and Nonpoint-Source Pollution Models: Review of Mathematical Bases. Am. Soc. Agric. Biol. Eng. 2003, 46, 1553–1566. [Google Scholar] [CrossRef] [Green Version]
- Saleh, A.; Du, B. Evaluation of SWAT and HSPF within Basins Program for the Upper North Bosque River Watershed in Centeral Texas. Am. Soc. Agric. Biol. Eng. 2004, 47, 1039–1049. [Google Scholar]
- Khoi, D.N. Comparison of the HEC-HMS and SWAT Hydrological Models in Simulating the Streamflow. J. Sci. Technol. 2015, 53, 189–195. [Google Scholar]
- Niraula, R.; Meixner, T.; Norman, L.M. Determining the importance of model calibration for forecasting absolute/relative changes in streamflow from LULC and climate changes. J. Hydrol. 2015, 522, 439–451. [Google Scholar] [CrossRef]
- Uzeika, T.; Merten, G.H.; Minella, J.P.G.; Moro, M. Use of the swat model for hydro-sedimentologic simulation in a small rural watershed. Rev. Bras. Ciência Solo 2012, 36, 557–565. [Google Scholar] [CrossRef]
- Srinivasan, R.; Zhang, X.; Arnold, J. SWAT Ungauged: Hydrological Budget and Crop Yield Predictions in the Upper Mississippi River Basin. Am. Soc. Agric. Biol. Eng. 2010, 53, 133–1546. [Google Scholar] [CrossRef]
- Urban Hydrology for Small Watersheds. In Technical Report, Soil Conservation Service; Engineering Division U.S. Department of Agriculture: Washington, DC, USA, 1986.
- GIS and Mapping Services. Montgomery County, VA, USA. Available online: https://montva.com/departments/planning-gis-intro/gis-and-mapping-services (accessed on 1 March 2021).
- Virginia Roads Open Data: Virginia Parcels (Map Service). 2021. Available online: https://www.virginiaroads.org/datasets/virginia-parcels-map-service (accessed on 1 March 2021).
- QGIS—A Free and Open Source Geographic Information System. 2021. Available online: https://qgis.org/en/site/ (accessed on 1 March 2021).
- FEMA. Hazus. 2021. Available online: https://www.fema.gov/flood-maps/products-tools/hazus (accessed on 1 March 2021).
- Smaczyński, M.; Horbiński, T. Creating a 3D Model of the Existing Historical Topographic Object Based on Low-Level Aerial Imagery. KN J. Cartogr. Geogr. Inf. 2021, 71, 33–43. [Google Scholar] [CrossRef]
- Keil, J.; Edler, D.; Schmitt, T.; Dickmann, F. Creating Immersive Virtual Environments Based on Open Geospatial Data and Game Engines. KN J. Cartogr. Geogr. Inf. 2021, 71, 53–65. [Google Scholar] [CrossRef]
- Atazadeh, B.; Rajabifard, A.; Zhang, Y.; Barzegar, M. Querying 3D Cadastral Information from BIM Models. ISPRS Int. J. Geo-Inf. 2019, 8, 329. [Google Scholar] [CrossRef] [Green Version]
- UNHCR Registers Over 41,000 People in Congested Dzaleka Refugee Camp. 2019. Available online: https://reliefweb.int/report/malawi/unhcr-registers-over-41000-people-congested-dzaleka-refugee-camp (accessed on 12 February 2021).
- Harmonized World Soil Database v1.2 FAO SOILS PORTAL. Available online: http://www.fao.org/soils-portal/data-hub/soil-maps-and-databases/harmonized-world-soil-database-v12/en/ (accessed on 14 February 2021).
- Dijkshoorn, J.A.; Leenaars, J.G.B.; Huting, J.H.M.; Kempen, B. Soil and Terrain Database of the Republic of Malawi; Number 2016/01 in ISRIC Report; ISRIC—World Soil Information: Wageningen, UK, 2016. [Google Scholar]
- Fuka, D.R.; Walter, M.T.; MacAlister, C.; Degaetano, A.T.; Steenhuis, T.S.; Easton, Z.M. Using the Climate Forecast System Reanalysis as weather input data for watershed models. Hydrol. Process. 2013, 28, 5613–5623. [Google Scholar] [CrossRef]
- Chio, S.H.; Chiang, C.C. Feasibility Study Using UAV Aerial Photogrammetry for a Boundary Verification Survey of a Digitalized Cadastral Area in an Urban City of Taiwan. Remote Sens. 2020, 12, 1682. [Google Scholar] [CrossRef]
- Mapping and Modelling Cadastral Boundaries using Drones and Photogrammetry Software. 2016. Available online: https://3dsurvey.si/case-studies/mapping-and-modelling-cadastral-boundaries-using-drones-and-photogrammetry-software (accessed on 5 April 2021).
- Lioi, B.; Gioia, A.; Totaro, V.; Balacco, G.; Iacobellis, V.; Chiaia, G. Coupled Use of Hydrologic-Hydraulic Model and Geomorphological Descriptors for Flood-Prone Areas Evaluation: A Case Study of Lama Lamasinata. In Proceedings of the Computational Science and Its Applications—ICCSA 2020, Cagliari, Italy, 1–4 July 2020; pp. 607–619. [Google Scholar] [CrossRef]
- Lastra, J.; Fernández, E.; Díez-Herrero, A.; Marquínez, J. Flood hazard delineation combining geomorphological and hydrological methods: An example in the Northern Iberian Peninsula. Nat. Hazards 2008, 45, 277–293. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flow Direction | Range of Degrees |
|---|---|
| Risk of Collapse | Thatched Roof | Tin Roof |
|---|---|---|
| Large Risk of Failure | 6 | 0 |
| Risk of Failure | 2 | 1 |
| Little to No Risk of Failure | 2 | 4 |
| Risk | Building Risk Value | % of Area | Population |
|---|---|---|---|
| Very Low | 0–0.25 | 70.19 | 28777 |
| Low | 0.25–0.5 | 13.66 | 5602 |
| High | 0.5–0.75 | 9.45 | 3874 |
| Very High | 0.75–1 | 6.70 | 2747 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Whitehurst, D.; Friedman, B.; Kochersberger, K.; Sridhar, V.; Weeks, J. Drone-Based Community Assessment, Planning, and Disaster Risk Management for Sustainable Development. Remote Sens. 2021, 13, 1739. https://doi.org/10.3390/rs13091739
Whitehurst D, Friedman B, Kochersberger K, Sridhar V, Weeks J. Drone-Based Community Assessment, Planning, and Disaster Risk Management for Sustainable Development. Remote Sensing. 2021; 13(9):1739. https://doi.org/10.3390/rs13091739
Chicago/Turabian StyleWhitehurst, Daniel, Brianna Friedman, Kevin Kochersberger, Venkat Sridhar, and James Weeks. 2021. "Drone-Based Community Assessment, Planning, and Disaster Risk Management for Sustainable Development" Remote Sensing 13, no. 9: 1739. https://doi.org/10.3390/rs13091739
APA StyleWhitehurst, D., Friedman, B., Kochersberger, K., Sridhar, V., & Weeks, J. (2021). Drone-Based Community Assessment, Planning, and Disaster Risk Management for Sustainable Development. Remote Sensing, 13(9), 1739. https://doi.org/10.3390/rs13091739