
Aerial Mapping of Odorous Gases in a Wastewater Treatment Plant Using a Small Drone

 , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
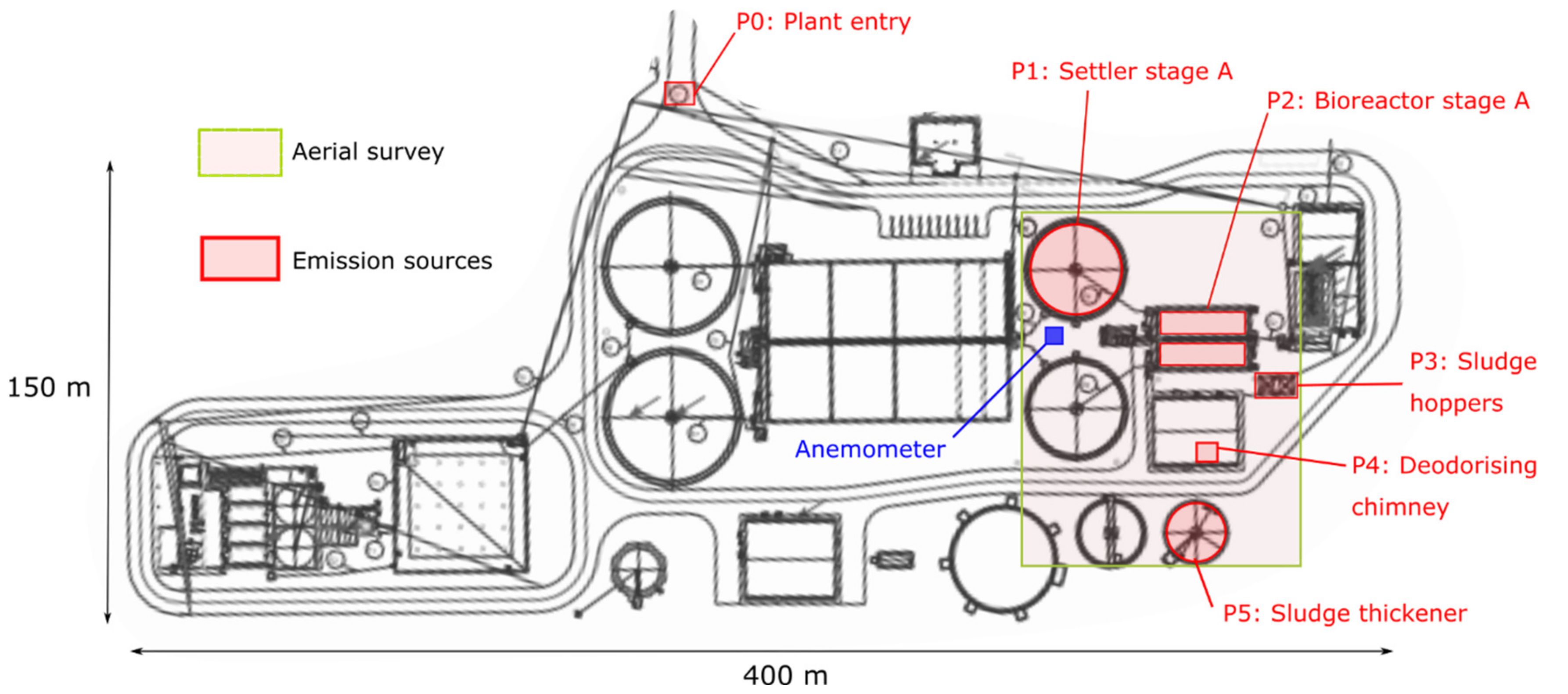
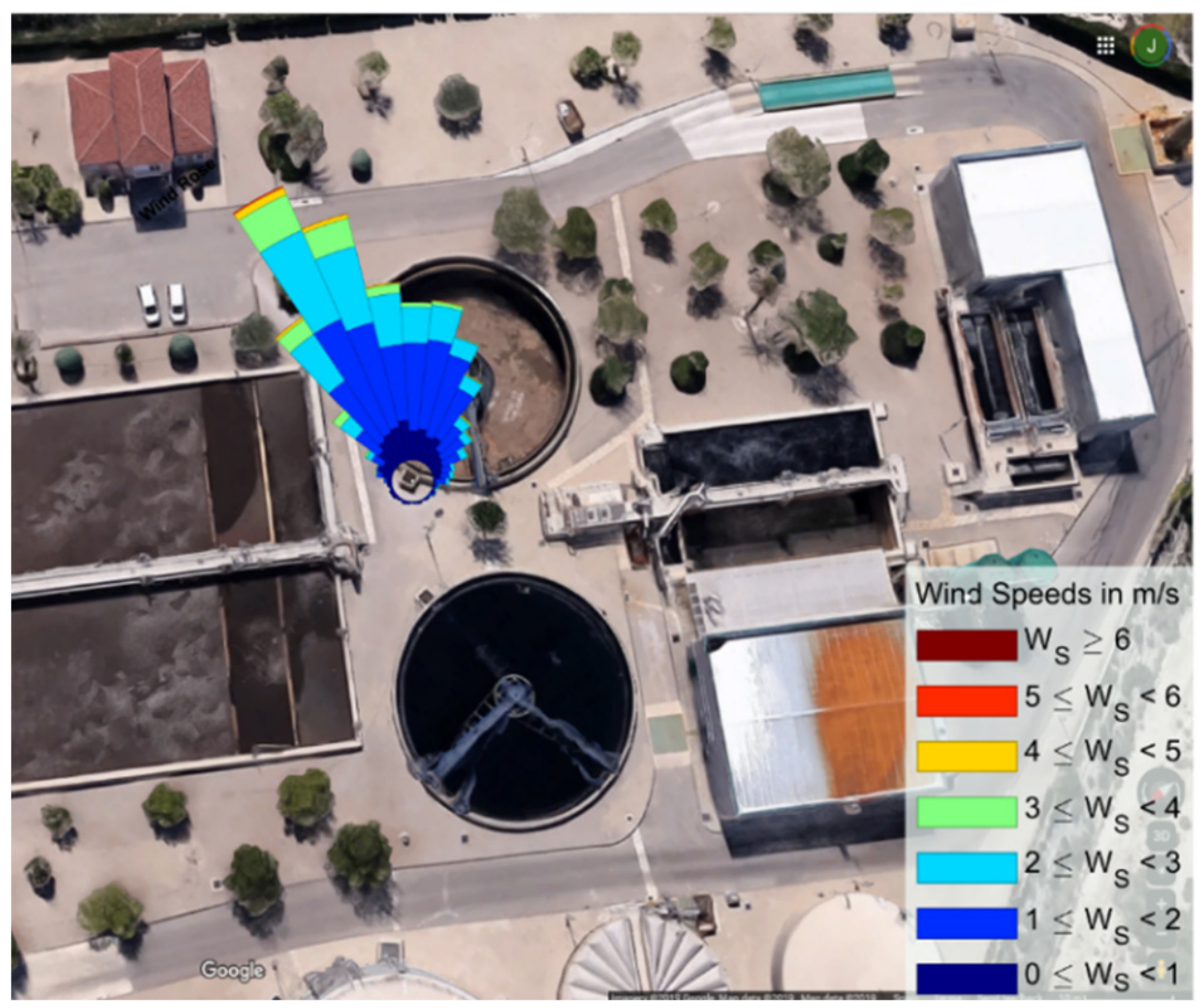
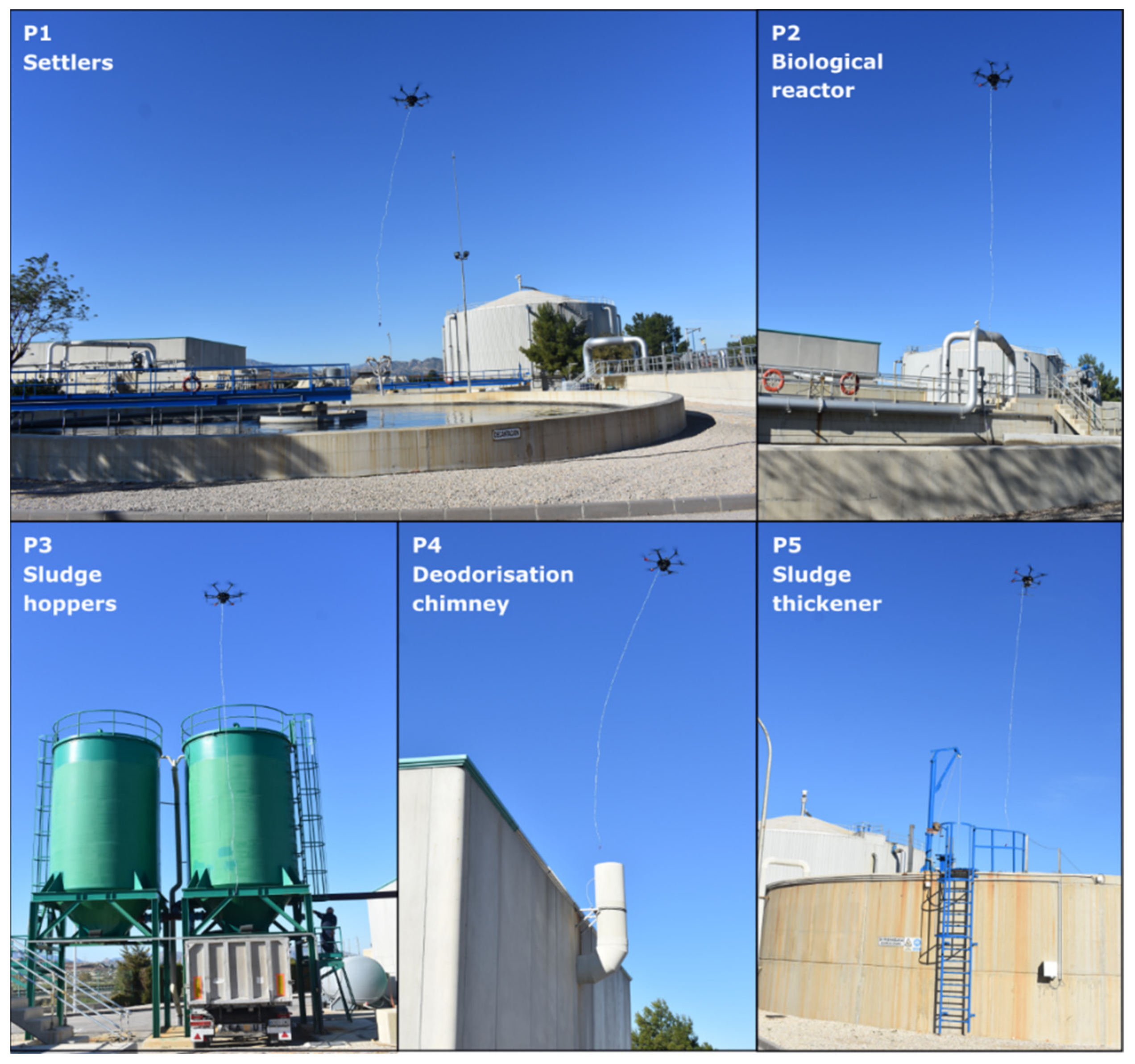
2.1. Test Site
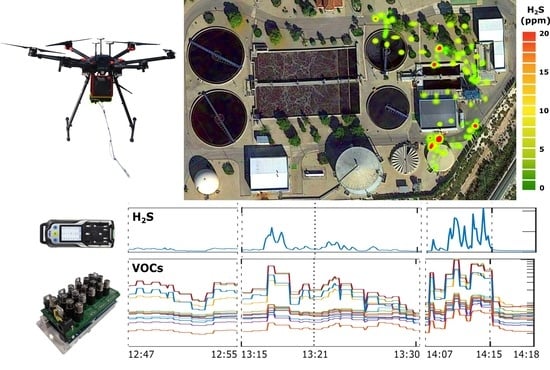
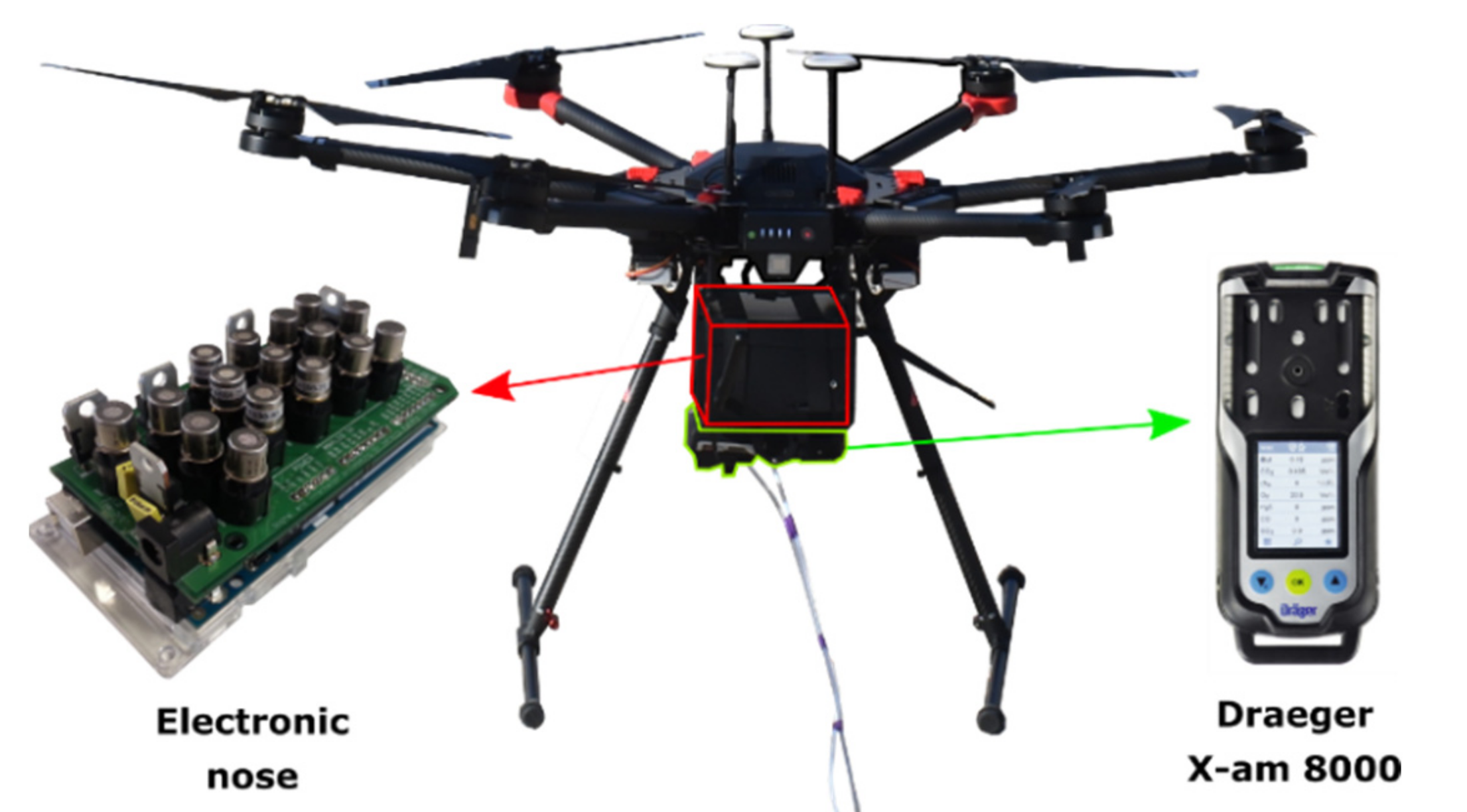
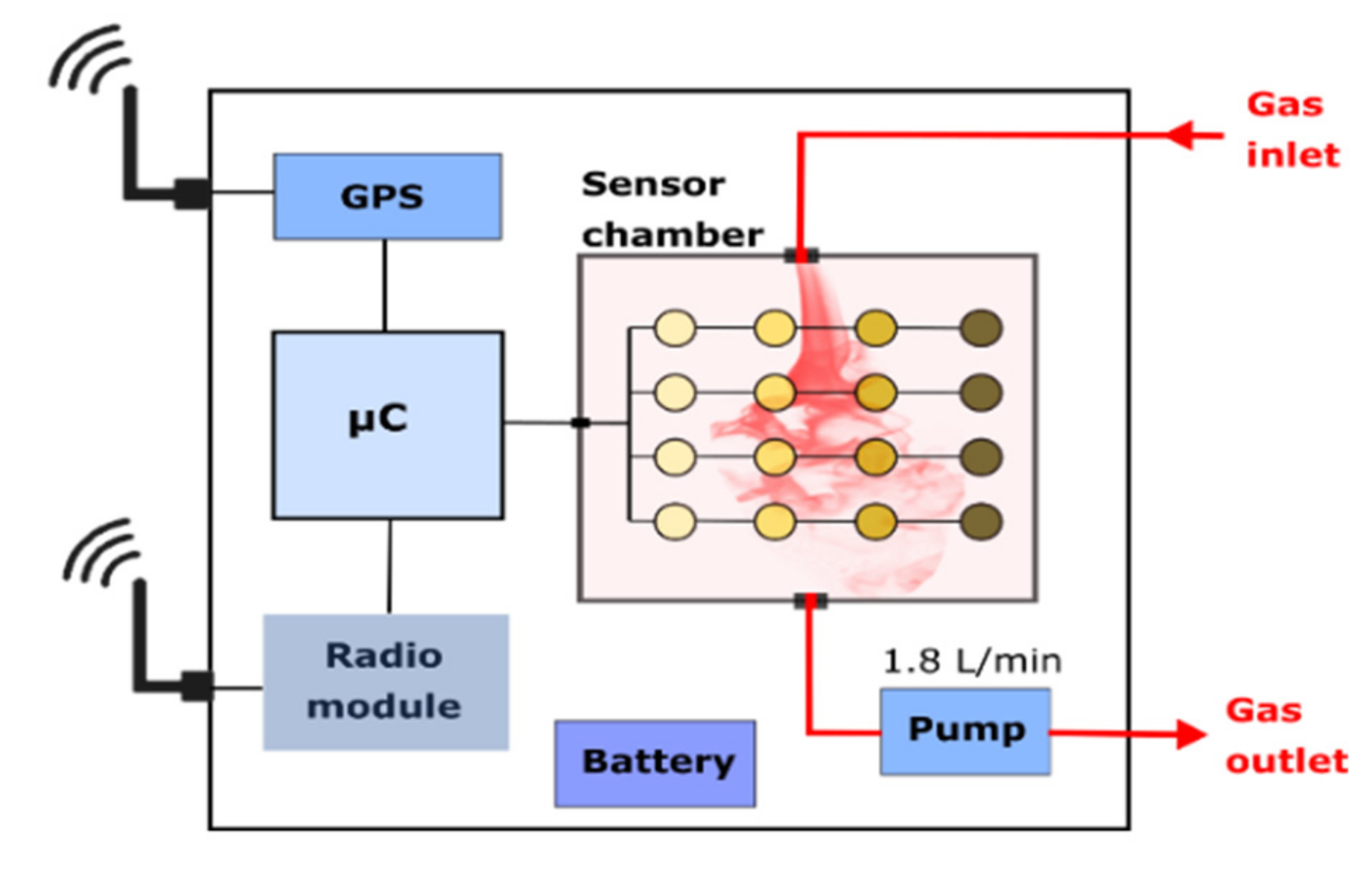
2.2. Drone and Payload
2.3. Experimental Protocol
2.4. Data Processing and Visualization
3. Results and Discussion
3.1. Weather Conditions
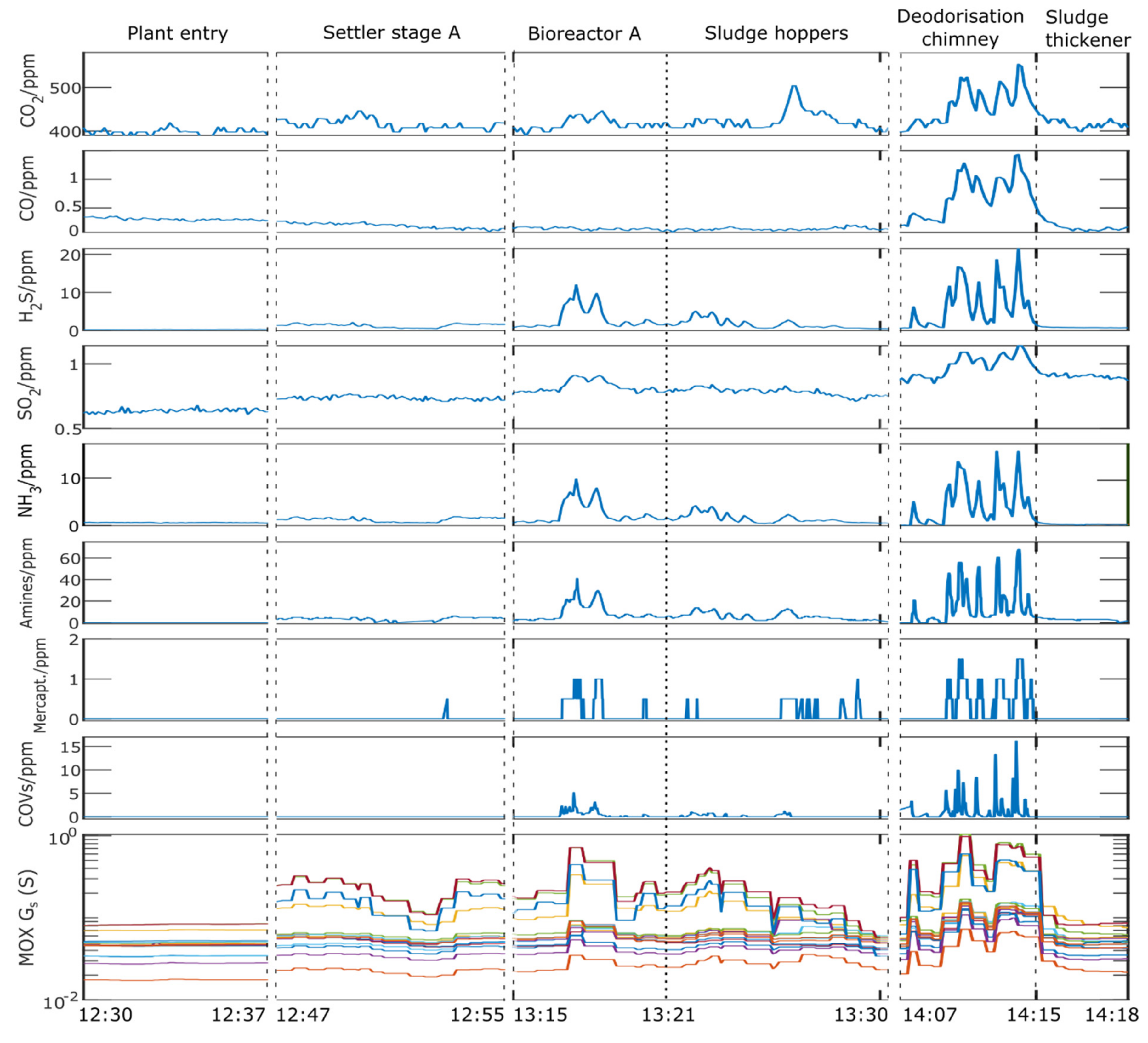
3.2. Gas Concentration Measurements
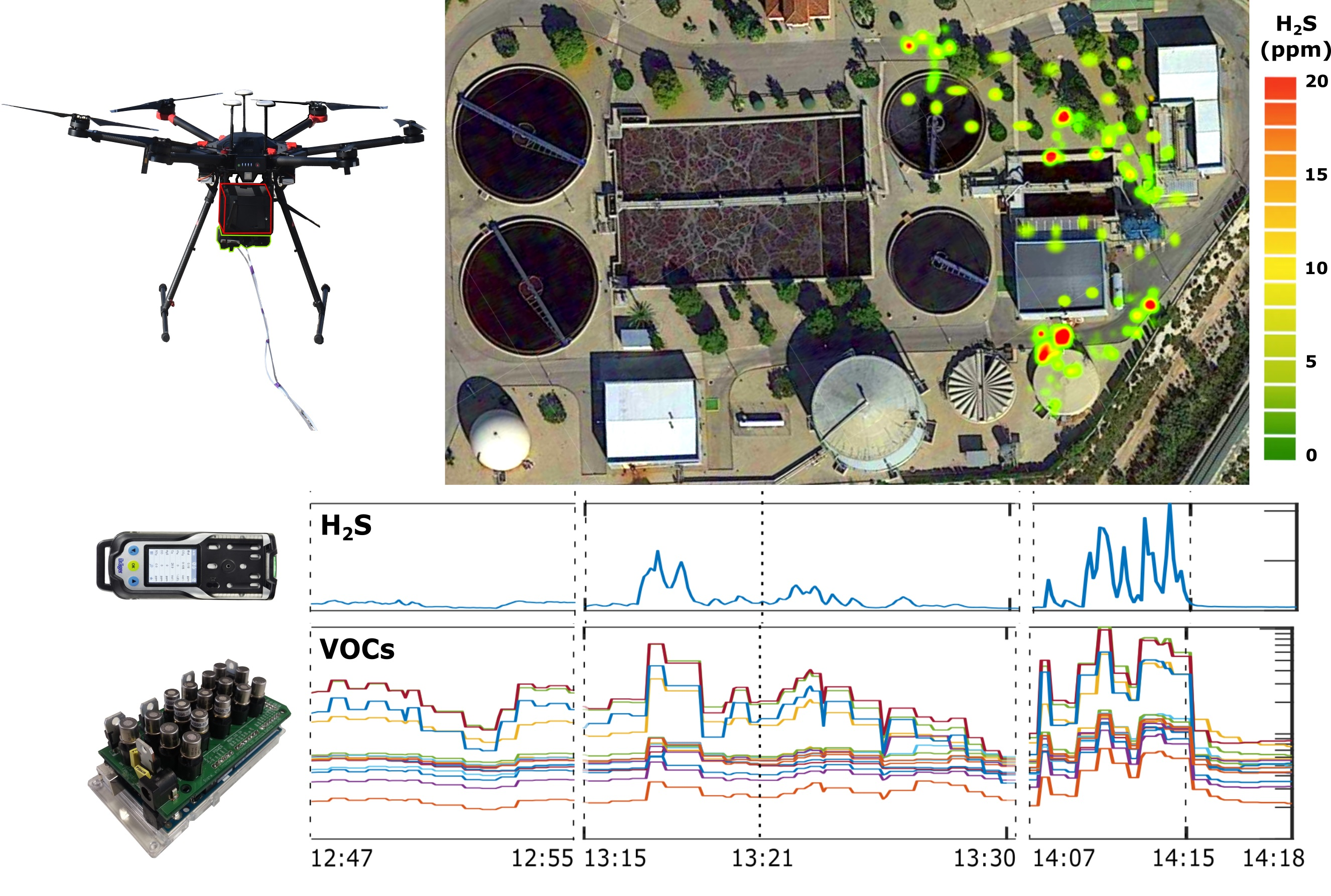
3.3. Gas Concentration Mapping
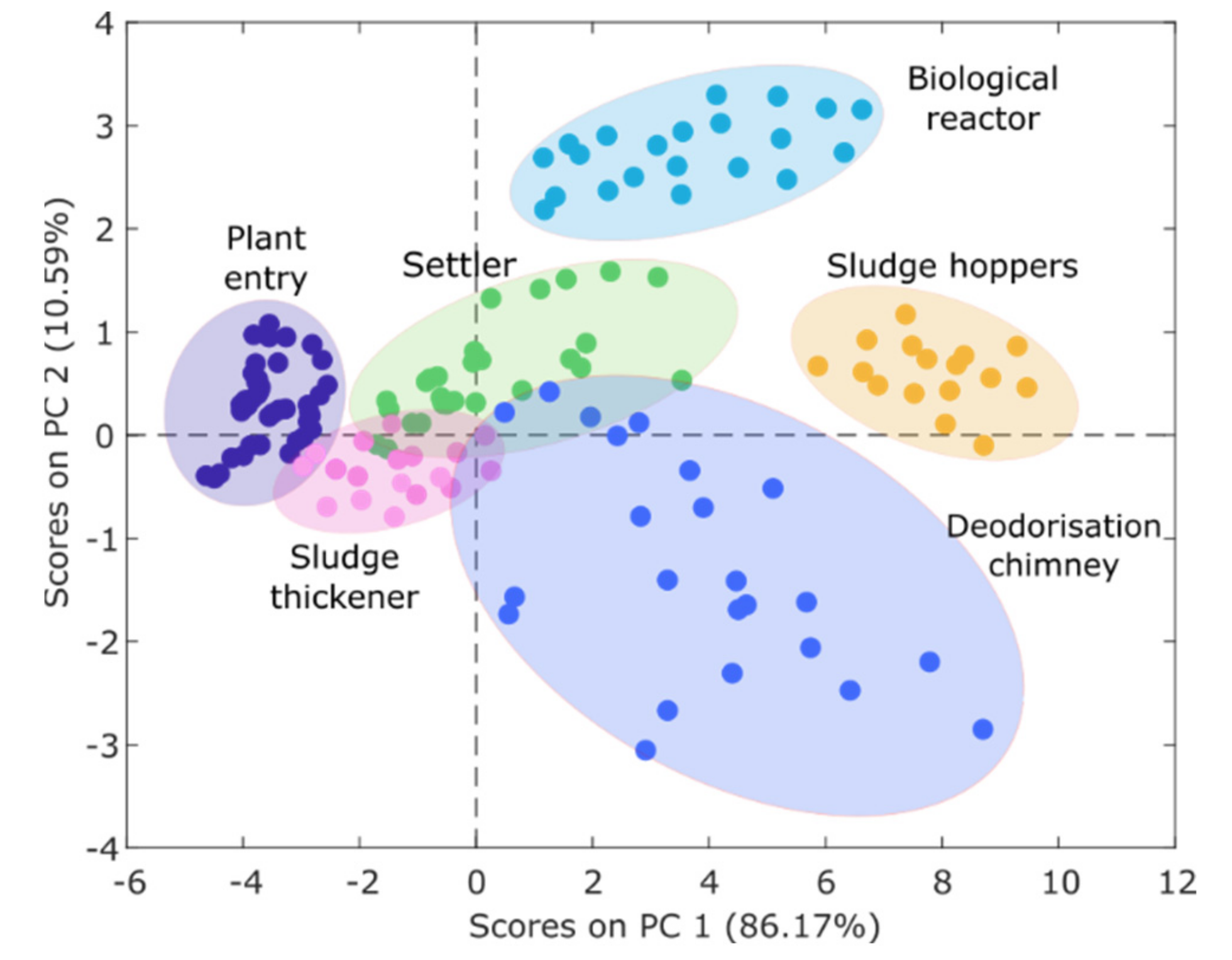
3.4. Gas Source Identification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Agency, E.E. Spain—Industrial Pollution Profile. 2019. Available online: https://www.eea.europa.eu/themes/industry/industrial-pollution/industrial-pollution-country-profiles-2019/spain (accessed on 24 April 2020).
- Dincer, F.; Muezzinoglu, A. Odor-causing volatile organic compounds in wastewater treatment plant units and sludge man-agement areas. J. Environ. Sci. Health Part A 2008, 43, 1569–1574. [Google Scholar] [CrossRef] [PubMed]
- Brinkmann, T.; Both, R.; Scalet, B.M.; Roudier, S.; Sancho, L.D. JRC Reference Report on Monitoring of Emissions to Air and Water from IED Installations. Ind. Emiss. Dir. 2018. [Google Scholar] [CrossRef]
- Directive, C. Directive 2010/75/EU of the European Parliament and of the Council. Off. J. Eur. Union L 2010, 334, 17–119. [Google Scholar]
- Brinkmann, T.; Santonja, G.G.; Yükseler, H.; Roudier, S.; Sancho, L.D. Best Available Techniques (BAT) Reference Document for Common Waste Water and Waste Gas Treatment/Management Systems in the Chemical Sector; Publications Office of the European Union: Luxembourg, 2016. [Google Scholar]
- Burgués, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020, 748, 141172. [Google Scholar] [CrossRef]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N. Near-field characterization of methane emission variability from a compressor station using a model air-craft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef]
- Ravikumar, A.P.; Sreedhara, S.; Wang, J.; Englander, J.; Roda-Stuart, D.; Bell, C.; Zimmerle, D.; Lyon, D.; Mogstad, I.; Ratner, B. Single-blind inter-comparison of methane detection technologies--results from the Stanford/EDF Mobile Monitoring Challenge. Elem. Sci. Anth. 2019, 7, 37. [Google Scholar] [CrossRef]
- Golston, L.M.; Aubut, N.F.; Frish, M.B.; Yang, S.; Talbot, R.W.; Gretencord, C.; McSpiritt, J.; Zondlo, M.A. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate. Atmosphere 2018, 9, 333. [Google Scholar] [CrossRef]
- Yang, S.; Talbot, R.; Frish, M.; Golston, L.; Aubut, N.; Zondlo, M.; Gretencord, C.; McSpiritt, J. Natural gas fugitive leak detec-tion using an unmanned aerial vehicle: Measurement system description and mass balance approach. Atmosphere 2018, 9, 383. [Google Scholar] [CrossRef]
- ConocoPhillips Testing Drone Technology to Detect and Quantify Emissions. Available online: http://www.conocophillips.com/sustainability/sustainability-news/story/testing-drone-technology-to-detect-and-quantify-emissions/ (accessed on 31 March 2020).
- BP p.l.c. BP North Sea Deploys Mars Technology in World-First Methane Monitoring Project. Available online: https://www.bp.com/en/global/corporate/news-and-insights/press-releases/bp-north-sea-deploys-mars-technology-in-world-first-methane-monitoring-project.html (accessed on 31 March 2020).
- TOTAL Group Integrating Climate into Our Strategy. Available online: https://www.total.com/sites/default/files/atoms/files/total_rapport_climat_2019_en.pdf#page=30 (accessed on 29 March 2020).
- Emran, B.J.; Tannant, D.D.; Najjaran, H. Low-Altitude Aerial Methane Concentration Mapping. Remote Sens. 2017, 9, 823. [Google Scholar] [CrossRef]
- Burgués, J.; Jiménez-Soto, J.M.; Marco, S. Estimation of the limit of detection in semiconductor gas sensors through linearized calibration models. Anal. Chim. Acta 2018, 1013, 13–25. [Google Scholar] [CrossRef]
- Mead, M.; Popoola, O.; Stewart, G.; Landshoff, P.; Calleja, M.; Hayes, M.; Baldovi, J.; McLeod, M.; Hodgson, T.; Dicks, J.; et al. The use of electrochemical sensors for monitoring urban air quality in low-cost, high-density networks. Atmos. Environ. 2013, 70, 186–203. [Google Scholar] [CrossRef]
- Martinez, D.; Burgués, J.; Marco, S. Fast Measurements with MOX Sensors: A Least-Squares Approach to Blind Deconvolution. Sensors 2019, 19, 4029. [Google Scholar] [CrossRef]
- Lilienthal, A.J.; Loutfi, A.; Duckett, T. Airborne Chemical Sensing with Mobile Robots. Sensors 2006, 6, 1616–1678. [Google Scholar] [CrossRef]
- Burgués, J.; Hernández, V.; Lilienthal, A.J.; Marco, S. Smelling Nano Aerial Vehicle for Gas Source Localization and Map-ping. Sensors 2019, 19, 478. [Google Scholar] [CrossRef]
- Burgués, J.; Hernández, V.; Lilienthal, A.J.; Marco, S. Gas distribution mapping and source localization using a 3D grid of metal oxide semiconductor sensors. Sens. Actuators B Chem. 2020, 304, 127309. [Google Scholar] [CrossRef]
- Neumann, P.P.; Asadi, S.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Autonomous gas-sensitive microdrone: Wind vector estima-tion and gas distribution mapping. IEEE Robot. Autom. Mag. 2012, 19, 50–61. [Google Scholar] [CrossRef]
- He, X.; Bourne, J.R.; Steiner, J.A.; Mortensen, C.; Hoffman, K.C.; Dudley, C.J.; Rogers, B.; Cropek, D.M.; Leang, K.K. Autonomous chemical-sensing aerial robot for urban/suburban environmental monitoring. IEEE Syst. J. 2019, 13, 3524–3535. [Google Scholar] [CrossRef]
- Schellenberg, B.; Richardson, T.; Watson, M.; Greatwood, C.; Clarke, R.; Thomas, R.; Wood, K.; Freer, J.; Thomas, H.; Liu, E.; et al. Remote sensing and identification of volcanic plumes using fixed-wing UAVs over Volcán de Fuego, Guatemala. J. Field Robot. 2019, 36, 1192–1211. [Google Scholar] [CrossRef]
- Bax, C.; Sironi, S.; Capelli, L. How Can Odors Be Measured? An Overview of Methods and Their Applications. Atmosphere 2020, 11, 92. [Google Scholar] [CrossRef]
- Capelli, L.; Sironi, S.; Del Rosso, R.; Céntola, P.; Grande, M.I. A comparative and critical evaluation of odour assessment methods on a landfill site. Atmos. Environ. 2008, 42, 7050–7058. [Google Scholar] [CrossRef]
- Levy, J.; Spengler, J.D.; Hlinka, D.; Sullivan, D.; Moon, D. Using CALPUFF to evaluate the impacts of power plant emissions in Illinois: Model sensitivity and implications. Atmos. Environ. 2002, 36, 1063–1075. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Sensor Type | Range | Accuracy |
|---|---|---|---|
| VOCs | 16× Metal oxide sensors | - | - |
| Temperature | MEMS | 40 to +85 °C | ±1 °C |
| Humidity | MEMS | 0 to 100% RH | ±3% r.h. |
| Pressure | MEMS | 30 to 110 kPa | ±0.1 kPa |
| Flow rate | Thermal | 0 to 33 L/min | ±3% m.v. |
| Parameter | Sensor Type | Range | Accuracy |
|---|---|---|---|
| H2S | Electrochemical cell | 0 to 100 ppm | ±0.1 ppm |
| NH3 | Electrochemical cell | 0 to 300 ppm | ±1 ppm |
| Amines | Electrochemical cell | 0 to 100 ppm | ±1 ppm |
| Mercaptans | Electrochemical cell | 0 to 40 ppm | ±0.5 ppm |
| VOCs | Photo-ionization detector | 0 to 2000 ppm | ±0.1 ppm |
| Drone | Hand-Held Detector | |
|---|---|---|
| H2S | 0–10 ppm | 0–100 ppm |
| NH3 | 0–10 ppm | 0–30 ppm |
| Amines | 0–65 ppm | 0–70 ppm |
| Mercaptans | 0–1.5 ppm | 0–1 ppm |
| VOCs | 0–15 ppm | 0–14 ppm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burgués, J.; Esclapez, M.D.; Doñate, S.; Pastor, L.; Marco, S. Aerial Mapping of Odorous Gases in a Wastewater Treatment Plant Using a Small Drone. Remote Sens. 2021, 13, 1757. https://doi.org/10.3390/rs13091757
Burgués J, Esclapez MD, Doñate S, Pastor L, Marco S. Aerial Mapping of Odorous Gases in a Wastewater Treatment Plant Using a Small Drone. Remote Sensing. 2021; 13(9):1757. https://doi.org/10.3390/rs13091757
Chicago/Turabian StyleBurgués, Javier, María Deseada Esclapez, Silvia Doñate, Laura Pastor, and Santiago Marco. 2021. "Aerial Mapping of Odorous Gases in a Wastewater Treatment Plant Using a Small Drone" Remote Sensing 13, no. 9: 1757. https://doi.org/10.3390/rs13091757
APA StyleBurgués, J., Esclapez, M. D., Doñate, S., Pastor, L., & Marco, S. (2021). Aerial Mapping of Odorous Gases in a Wastewater Treatment Plant Using a Small Drone. Remote Sensing, 13(9), 1757. https://doi.org/10.3390/rs13091757