
Acoustic Seafloor Classification Using the Weyl Transform of Multibeam Echosounder Backscatter Mosaic †

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Multibeam Data Acquisition and Processing
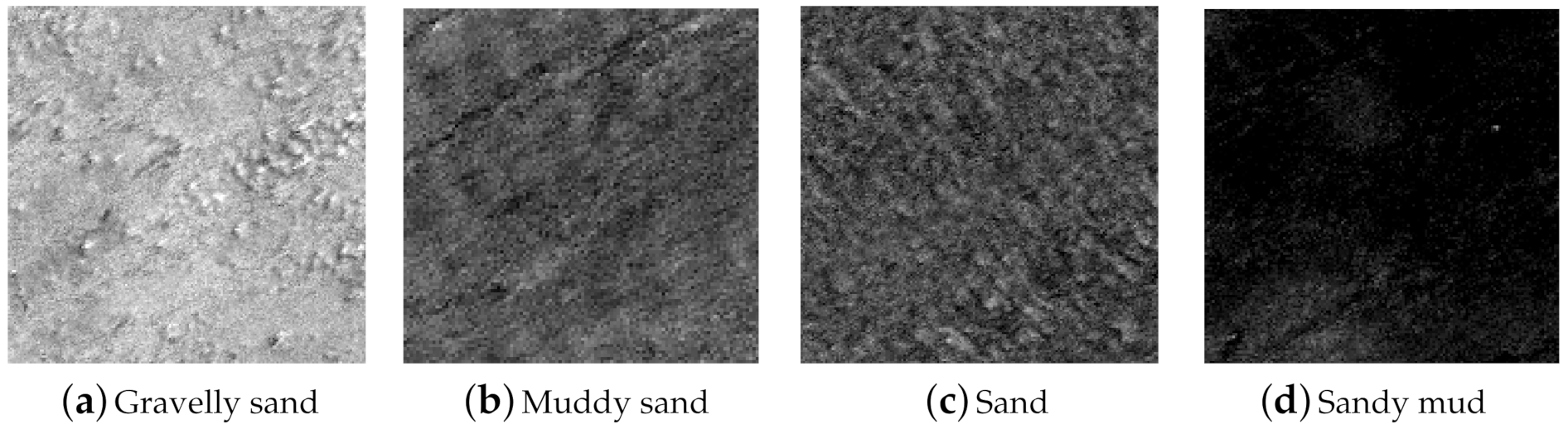
2.2. Ground-Truth Data Acquisition and Processing
2.3. Seafloor Characterization Based on the Weyl Transform
2.3.1. The Weyl Representation
2.3.2. Texture Descriptor
| Algorithm 1: Weyl feature extraction from multibeam backscatter images. |
Input: A multibeam backscatter image, sampling size , sliding step Procedures:
Output: Weyl coefficients of the image patch |
2.4. Cluster Consistency Comparison with Classical Texture Features
2.5. Scale Selection
2.6. Statistical Modeling and Protocol of Error Estimation
3. Experimental Results
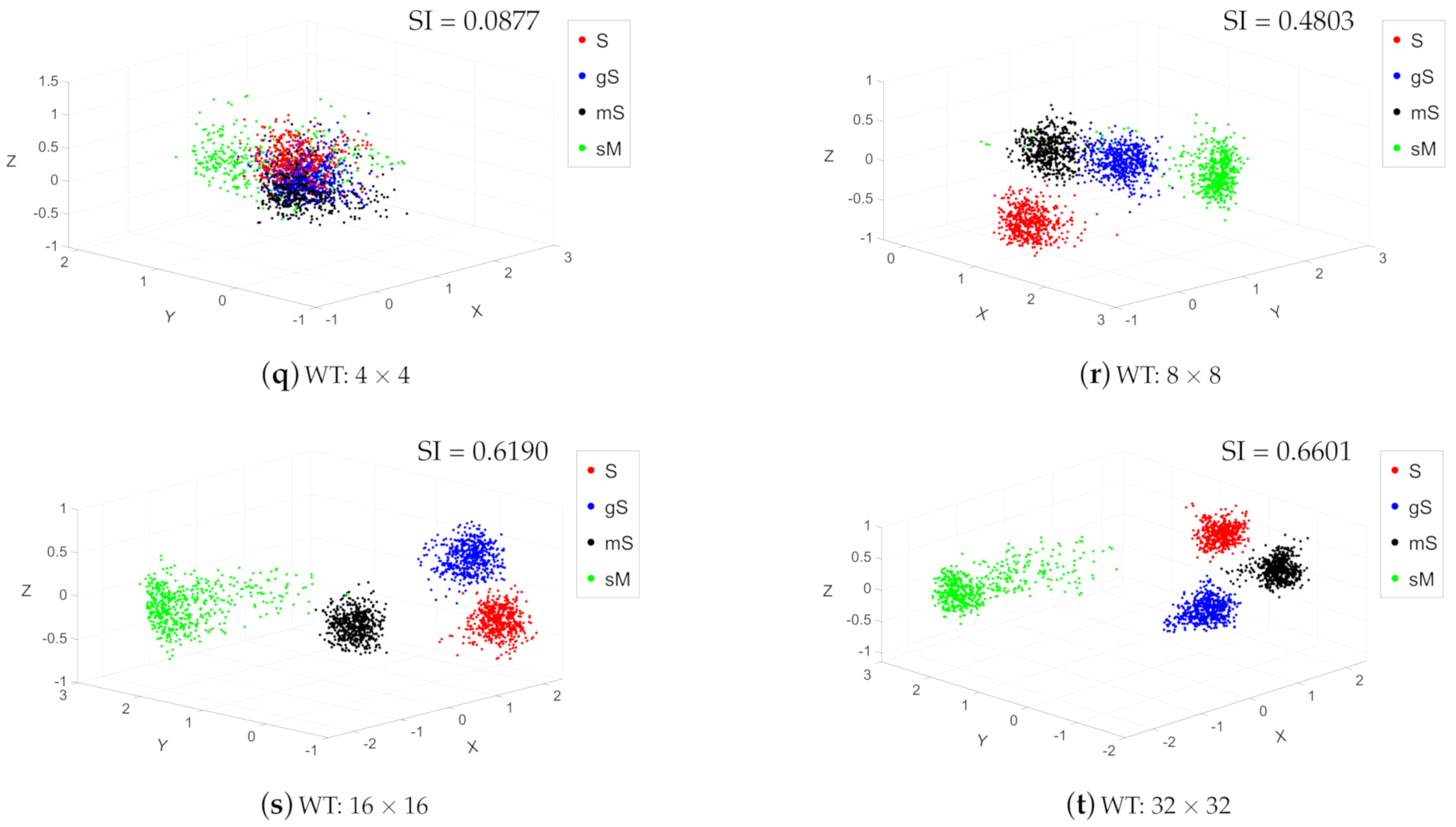
3.1. Clustering Analysis
3.2. Multiple Scale Analysis


3.3. Quantitative Comparison of Classification Accuracy
4. Discussion
4.1. Multiscale Cluster Consistency
4.2. Classification Accuracy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Halpern, B.S.; Walbridge, S.; Selkoe, K.A.; Kappel, C.V.; Micheli, F.; D’Agrosa, C.; Bruno, J.F.; Casey, K.S.; Ebert, C.; Fox, H.E.; et al. A global map of human impact on marine ecosystems. Science 2008, 319, 948–952. [Google Scholar] [CrossRef] [Green Version]
- Douvere, F. The importance of marine spatial planning in advancing ecosystem-based sea use management. Mar. Policy 2008, 32, 762–771. [Google Scholar] [CrossRef]
- Diesing, M.; Mitchell, P.J.; O’Keeffe, E.; Gavazzi, G.O.A.M.; Bas, T.L. Limitations of Predicting Substrate Classes on a Sedimentary Complex but Morphologically Simple Seabed. Remote Sens. 2020, 12, 3398. [Google Scholar] [CrossRef]
- Kostylev, V.E.; Todd, B.J.; Fader, G.B.; Courtney, R.; Cameron, G.D.; Pickrill, R.A. Benthic habitat mapping on the Scotian Shelf based on multibeam bathymetry, surficial geology and sea floor photographs. Mar. Ecol. Prog. Ser. 2001, 219, 121–137. [Google Scholar] [CrossRef] [Green Version]
- McArthur, M.; Brooke, B.; Przeslawski, R.; Ryan, D.; Lucieer, V.; Nichol, S.; McCallum, A.; Mellin, C.; Cresswell, I.; Radke, L.C. On the use of abiotic surrogates to describe marine benthic biodiversity. Estuar. Coast. Shelf Sci. 2010, 88, 21–32. [Google Scholar] [CrossRef]
- Kenny, A.; Cato, I.; Desprez, M.; Fader, G.; Schüttenhelm, R.; Side, J. An overview of seabed-mapping technologies in the context of marine habitat classification. ICES J. Mar. Sci. 2003, 60, 411–418. [Google Scholar] [CrossRef] [Green Version]
- Lurton, X.; Augustin, J. A Measurement Quality Factor for Swath Bathymetry Sounders. IEEE J. Ocean. Eng. 2010, 35, 852–862. [Google Scholar] [CrossRef]
- Lurton, X.; Lamarche, G.; Brown, C.; Lucieer, V.; Rice, G.; Schimel, A.; Weber, T. Backscatter Measurements by Seafloor-Mapping Sonars. Guidelines and Recommendations. Available online: http://geohab.org/wp-content/uploads/2014/05/BSWGREPORT-MAY2015.pdf (accessed on 7 January 2020).
- Schimel, A.C.G.; Beaudoin, J.; Parnum, I.M.; Le Bas, T.; Schmidt, V.; Keith, G.; Ierodiaconou, D. Multibeam sonar backscatter data processing. Mar. Geophys. Res. 2018, 39, 121–137. [Google Scholar] [CrossRef]
- Brown, C.J.; Todd, B.J.; Kostylev, V.E.; Pickrill, R.A. Image-based classification of multibeam sonar backscatter data for objective surficial sediment mapping of Georges Bank, Canada. Cont. Shelf Res. 2011, 31, S110–S119. [Google Scholar] [CrossRef]
- Montereale Gavazzi, G.; Madricardo, F.; Janowski, L.; Kruss, A.; Blondel, P.; Sigovini, M.; Foglini, F. Evaluation of seabed mapping methods for fine-scale classification of extremely shallow benthic habitats-Application to the Venice Lagoon, Italy. Estuar. Coast. Shelf Sci. 2016, 170, 45–60. [Google Scholar] [CrossRef] [Green Version]
- Gaida, T.C.; Snellen, M.; van Dijk, T.A.G.P.; Simons, D.G. Geostatistical modelling of multibeam backscatter for full-coverage seabed sediment maps. Hydrobiologia 2018. [Google Scholar] [CrossRef] [Green Version]
- Mayer, L.; Jakobsson, M.; Allen, G.; Dorschel, B.; Falconer, R.; Ferrini, V.; Lamarche, G.; Snaith, H.; Weatherall, P. The Nippon Foundation—GEBCO Seabed 2030 Project: The Quest to See the World’s Oceans Completely Mapped by 2030. Geosciences 2018, 8, 63. [Google Scholar] [CrossRef] [Green Version]
- Collier, J.S.; Brown, C.J. Correlation of sidescan backscatter with grain size distribution of surficial seabed sediments. Mar. Geol. 2005, 214, 431–449. [Google Scholar] [CrossRef]
- Ferrini, V.L.; Flood, R.D. The effects of fine-scale surface roughness and grain size on 300 kHz multibeam backscatter intensity in sandy marine sedimentary environments. Mar. Geol. 2006, 228, 153–172. [Google Scholar] [CrossRef]
- Goff, J.A.; Kraft, B.J.; Mayer, L.A.; Schock, S.G.; Sommerfield, C.K.; Olson, H.C.; Gulick, S.P.S.; Nordfjord, S. Seabed characterization on the New Jersey middle and outer shelf: Correlatability and spatial variability of seafloor sediment properties. Mar. Geol. 2004, 209, 147–172. [Google Scholar] [CrossRef]
- Lamarche, G.; Lurton, X. Recommendations for improved and coherent acquisition and processing of backscatter data from seafloor-mapping sonars. Mar. Geophys. Res. 2018, 39, 5–22. [Google Scholar] [CrossRef] [Green Version]
- Fonseca, L.; Mayer, L. Remote estimation of surficial seafloor properties through the application Angular Range Analysis to multibeam sonar data. Mar. Geophys. Res. 2007, 28, 119–126. [Google Scholar] [CrossRef]
- Anderson, J.T.; Holliday, V.; Kloser, R.; Reid, D.; Simard, Y.; Brown, C.J.; Chapman, R.; Coggan, R.; Kieser, R.; Michaels, W.L. Acoustic Seabed Classification of Marine Physical and Biological Landscapes. In Proceedings of the International Council for the Exploration of the Sea, Copenhagen, Denmark, August 2007; pp. 61–63. [Google Scholar]
- Anderson, J.T.; Van Holliday, D.; Kloser, R.; Reid, D.G.; Simard, Y. Acoustic seabed classification: Current practice and future directions. ICES J. Mar. Sci. 2008, 65, 1004–1011. [Google Scholar] [CrossRef]
- Stephens, D.; Diesing, M. A Comparison of Supervised Classification Methods for the Prediction of Substrate Type Using Multibeam Acoustic and Legacy Grain-Size Data. PLoS ONE 2014, 9, e93950. [Google Scholar] [CrossRef]
- Gazis, I.Z.; Schoening, T.; Alevizos, E.; Greinert, J. Quantitative mapping and predictive modeling of Mn nodules’ distribution from hydroacoustic and optical AUV data linked by random forests machine learning. Biogeosciences 2018, 15, 7347–7377. [Google Scholar] [CrossRef] [Green Version]
- Janowski, L.; Trzcinska, K.; Tegowski, J.; Kruss, A.; Rucinska-Zjadacz, M.; Pocwiardowski, P. Nearshore benthic habitat mapping based on multi-frequency, multibeam echosounder data using a combined object-based approach: A case study from the Rowy site in the southern Baltic sea. Remote Sens. 2018, 10, 1983. [Google Scholar] [CrossRef] [Green Version]
- Ierodiaconou, D.; Schimel, A.C.G.; Kennedy, D.; Monk, J.; Gaylard, G.; Young, M.; Diesing, M.; Rattray, A. Combining pixel and object based image analysis of ultra-high resolution multibeam bathymetry and backscatter for habitat mapping in shallow marine waters. Mar. Geophys. Res. 2018, 39, 271–288. [Google Scholar] [CrossRef]
- Porskamp, P.; Rattray, A.; Young, M.; Ierodiaconou, D. Multiscale and Hierarchical Classification for Benthic Habitat Mapping. Geosciences 2018, 8, 119. [Google Scholar] [CrossRef] [Green Version]
- Turner, J.A.; Babcock, R.C.; Hovey, R.; Kendrick, G.A. Can single classifiers be as useful as model ensembles to produce benthic seabed substratum maps? Estuar. Coast. Shelf Sci. 2018, 204, 149–163. [Google Scholar] [CrossRef]
- McLaren, K.; McIntyre, K.; Prospere, K. Using the random forest algorithm to integrate hydroacoustic data with satellite images to improve the mapping of shallow nearshore benthic features in a marine protected area in Jamaica. Giscience Remote Sens. 2019, 56, 1065–1092. [Google Scholar] [CrossRef]
- Zelada Leon, A.; Huvenne, V.A.I.; Benoist, N.M.A.; Ferguson, M.; Bett, B.J.; Wynn, R.B. Assessing the Repeatability of Automated Seafloor Classification Algorithms, with Application in Marine Protected Area Monitoring. Remote Sens. 2020, 12, 1572. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Alevizos, E.; Snellen, M.; Simons, D.G.; Siemes, K.; Greinert, J. Acoustic discrimination of relatively homogeneous fine sediments using Bayesian classification on MBES data. Mar. Geol. 2015, 370, 31–42. [Google Scholar] [CrossRef]
- Pace, N.G.; Dyer, C.M. Machine Classification of Sedimentary Sea Bottoms. IEEE Trans. Geosci. Electron. 1979, 17, 52–56. [Google Scholar] [CrossRef]
- Huvenne, V.A.I.; Blondel, P.; Henriet, J.P. Textural analyses of sidescan sonar imagery from two mound provinces in the Porcupine Seabight. Mar. Geol. 2002, 189, 323–341. [Google Scholar] [CrossRef] [Green Version]
- Huseby, R.B.; Milvang, O.; Solberg, A.S.; Bjerde, K.W. Seabed classification from multibeam echosounder data using statistical methods. In Proceedings of the OCEANS ’93, Victoria, BC, Canada, 18–21 October 1993; pp. III/229–III/233. [Google Scholar]
- Snellen, M.; Gaida, T.C.; Koop, L.; Alevizos, E.; Simons, D.G. Performance of Multibeam Echosounder Backscatter-Based Classification for Monitoring Sediment Distributions Using Multitemporal Large-Scale Ocean Data Sets. IEEE J. Ocean. Eng. 2018, 44, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Carmichael, D.; Linnett, L.; Clarke, S.; Calder, B. Seabed classification through multifractal analysis of sidescan sonar imagery. IEE Proc. Radar Sonar Navig. 1996, 143, 140–148. [Google Scholar] [CrossRef]
- Preston, J. Automated acoustic seabed classification of multibeam images of Stanton Banks. Appl. Acoust. 2009, 70, 1277–1287. [Google Scholar] [CrossRef]
- Reut, Z.; Pace, N.; Heaton, M. Computer classification of sea beds by sonar. Nature 1985, 314, 426–428. [Google Scholar] [CrossRef]
- Atallah, L.N. Learning from Sonar Data for the Classification of Underwater Seabeds. Ph.D. Thesis, University of Oxford, Oxford, UK, 2005. [Google Scholar]
- Karoui, I.; Fablet, R.; Boucher, J.M.; Augustin, J.M. Seabed Segmentation Using Optimized Statistics of Sonar Textures. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1621–1631. [Google Scholar] [CrossRef]
- Qiu, Q.; Thompson, A.; Calderbank, R.; Sapiro, G. Data Representation Using the Weyl Transform. IEEE Trans. Signal Process. 2016, 64, 1844–1853. [Google Scholar] [CrossRef] [Green Version]
- Ahn, H.K.; Qiu, Q.; Bosch, E.; Thompson, A.; Robles, F.E.; Sapiro, G.; Warren, W.S.; Calderbank, R. Classifying Pump-Probe Images of Melanocytic Lesions Using the WEYL Transform. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 4209–4213. [Google Scholar]
- Howard, S.D.; Calderbank, A.R.; Moran, W. The finite Heisenberg-Weyl groups in radar and communications. EURASIP J. Adv. Signal Process. 2006, 085685. [Google Scholar] [CrossRef] [Green Version]
- Montereale Gavazzi, G. Development of Seafloor Mapping Strategies Supporting Integrated Marine Management: Application of Seafloor Backscatter by Multibeam Echosounders. Ph.D. Thesis, Ghent University, Gent, Belgium, 2019. [Google Scholar]
- Montereale Gavazzi, G.; Roche, M.; Lurton, X.; Degrendele, K.; Terseleer, N.; Van Lancker, V. Seafloor change detection using multibeam echosounder backscatter: Case study on the Belgian part of the North Sea. Mar. Geophys. Res. 2018, 39, 229–247. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Heikkila, M.; Pietikainen, M. A texture-based method for modeling the background and detecting moving objects. IEEE Trans. Pattern Anal. Mach. Int. 2006, 28, 657–662. [Google Scholar] [CrossRef] [Green Version]
- Rousseeuw, P.J. Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Valavi, R.; Elith, J.; Lahoz-Monfort, J.J.; Guillera-Arroita, G.; Warton, D. BLOCKCV: An R package for generating spatially or environmentally separated folds for k-fold cross-validation of species distribution models. Methods Ecol. Evol. 2018, 10, 225–232. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G. Accuracy assessment and validation of remotely sensed and other spatial information. Int. J. Wildland Fire 2001, 10, 321–328. [Google Scholar] [CrossRef] [Green Version]
- Strong, J.A.; Clements, A.; Lillis, H.; Galparsoro, I.; Bildstein, T.; Pesch, R. A review of the influence of marine habitat classification schemes on mapping studies: Inherent assumptions, influence on end products, and suggestions for future developments. ICES J. Mar. Sci. 2019, 76, 10–22. [Google Scholar] [CrossRef] [Green Version]
- Kong, W.Z.; Hong, J.C.; Jia, M.Y.; Yao, J.L.; Gong, W.H.; Hu, H.; Zhang, H.G. YOLOv3-DPFIN: A Dual-Path Feature Fusion Neural Network for Robust Real-Time Sonar Target Detection. IEEE Sens. J. 2020, 20, 3745–3756. [Google Scholar] [CrossRef]
- Asokan, A.; Anitha, J.; Patrut, B.; Danciulescu, D.; Hemanth, D.J. Deep Feature Extraction and Feature Fusion for Bi-Temporal Satellite Image Classification. Comput. Mater. Contin. 2021, 66, 373–388. [Google Scholar] [CrossRef]
- Mu, C.; Liu, Y.; Liu, Y. Hyperspectral Image Spectral–Spatial Classification Method Based on Deep Adaptive Feature Fusion. Remote Sens. 2021, 13, 746. [Google Scholar] [CrossRef]
- Janowski, Ł.; Tęgowski, J.; Nowak, J. Seafloor mapping based on multibeam echosounder bathymetry and backscatter data using Object-Based Image Analysis: A case study from the Rewal site, the Southern Baltic. Oceanol. Hydrobiol. Stud. 2018, 47, 248–259. [Google Scholar] [CrossRef]
- Kaskela, A.M.; Kotilainen, A.T.; Alanen, U.; Cooper, R.; Green, S.; Guinan, J.; van Heteren, S.; Kihlman, S.; Van Lancker, V.; Stevenson, A. Picking up the pieces—Harmonising and collating seabed substrate data for European maritime areas. Geosciences 2019, 9, 84. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Silhouette Index | Scale | ||||
|---|---|---|---|---|---|
| Method | |||||
| First-order statistics | 0.3963 | 0.4386 | 0.5202 | 0.6301 | |
| GLCM features | 0.3126 | 0.3880 | 0.4454 | 0.6213 | |
| Wavelet transform | 0.2248 | 0.3373 | 0.3763 | 0.4207 | |
| LBP | −0.0175 | 0.0578 | 0.3449 | 0.4480 | |
| Weyl transform | 0.0877 | 0.4803 | 0.6190 | 0.6601 | |
| Prediction | S | gS | mS | sM | Total | Accuracy | K | ||
|---|---|---|---|---|---|---|---|---|---|
| Ground-Truth | |||||||||
| S | 809 | 612 | 352 | 27 | 1800 | 44.94% | 0.6120 | 28.50% | |
| gS | 572 | 1212 | 16 | 0 | 1800 | 67.33% | |||
| mS | 264 | 72 | 1456 | 8 | 1800 | 80.89% | |||
| sM | 43 | 0 | 129 | 1628 | 1800 | 90.44% | |||
| Total | 1688 | 1896 | 1953 | 1663 | 7200 | 70.90% | |||
| Prediction | S | gS | mS | sM | Total | Accuracy | K | ||
|---|---|---|---|---|---|---|---|---|---|
| Ground-Truth | |||||||||
| S | 761 | 640 | 380 | 19 | 1800 | 42.28% | 0.6057 | 29.75% | |
| gS | 508 | 1260 | 31 | 1 | 1800 | 70.00% | |||
| mS | 296 | 61 | 1433 | 10 | 1800 | 79.61% | |||
| sM | 47 | 0 | 136 | 1617 | 1800 | 89.83% | |||
| Total | 1612 | 1961 | 1980 | 1647 | 7200 | 70.43% | |||
| Prediction | S | gS | mS | sM | Total | Accuracy | K | ||
|---|---|---|---|---|---|---|---|---|---|
| Ground-Truth | |||||||||
| S | 710 | 656 | 395 | 39 | 1800 | 39.44% | 0.6217 | 28.13% | |
| gS | 434 | 1337 | 29 | 0 | 1800 | 74.28% | |||
| mS | 236 | 103 | 1441 | 20 | 1800 | 80.06% | |||
| sM | 22 | 0 | 109 | 1669 | 1800 | 92.72% | |||
| Total | 1402 | 2096 | 1974 | 1728 | 7200 | 71.63% | |||
| Prediction | S | gS | mS | sM | Total | Accuracy | K | ||
|---|---|---|---|---|---|---|---|---|---|
| Ground-Truth | |||||||||
| S | 603 | 660 | 516 | 21 | 1800 | 33.50% | 0.2276 | 59.13% | |
| gS | 639 | 608 | 535 | 18 | 1800 | 33.78% | |||
| mS | 504 | 563 | 708 | 25 | 1800 | 39.33% | |||
| sM | 176 | 213 | 301 | 1110 | 1800 | 61.67% | |||
| Total | 1922 | 2044 | 2060 | 1174 | 7200 | 42.07% | |||
| Prediction | S | gS | mS | sM | Total | Accuracy | K | ||
|---|---|---|---|---|---|---|---|---|---|
| Ground-Truth | |||||||||
| S | 1358 | 425 | 17 | 0 | 1800 | 75.44% | 0.7119 | 21.25% | |
| gS | 517 | 1108 | 169 | 6 | 1800 | 61.56% | |||
| mS | 38 | 328 | 1412 | 22 | 1800 | 78.44% | |||
| sM | 0 | 11 | 23 | 1766 | 1800 | 98.11% | |||
| Total | 1913 | 1872 | 1621 | 1794 | 7200 | 78.39% | |||
| Method | Classification Accuracy | |||||
|---|---|---|---|---|---|---|
| S | gS | mS | sM | Total | ||
| First-order statistics | 43.36% | 69.91% | 77.33% | 92.16% | 7200 | 70.69% |
| GLCM features | 40.05% | 71.21% | 75.29% | 91.57% | 7200 | 69.53% |
| Wavelet transform | 37.46% | 74.26% | 77.56% | 92.28% | 7200 | 70.39% |
| LBP | 38.17% | 31.01% | 38.36% | 62.69% | 7200 | 42.56% |
| Weyl transform | 62.49% | 62.13% | 86.18% | 96.61% | 7200 | 76.85% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Montereale Gavazzi, G.; Lazendić, S.; Zhao, Y.; Pižurica, A. Acoustic Seafloor Classification Using the Weyl Transform of Multibeam Echosounder Backscatter Mosaic. Remote Sens. 2021, 13, 1760. https://doi.org/10.3390/rs13091760
Zhao T, Montereale Gavazzi G, Lazendić S, Zhao Y, Pižurica A. Acoustic Seafloor Classification Using the Weyl Transform of Multibeam Echosounder Backscatter Mosaic. Remote Sensing. 2021; 13(9):1760. https://doi.org/10.3390/rs13091760
Chicago/Turabian StyleZhao, Ting, Giacomo Montereale Gavazzi, Srđan Lazendić, Yuxin Zhao, and Aleksandra Pižurica. 2021. "Acoustic Seafloor Classification Using the Weyl Transform of Multibeam Echosounder Backscatter Mosaic" Remote Sensing 13, no. 9: 1760. https://doi.org/10.3390/rs13091760