
Specific Windows Search for Multi-Ship and Multi-Scale Wake Detection in SAR Images


Abstract
:
1. Introduction
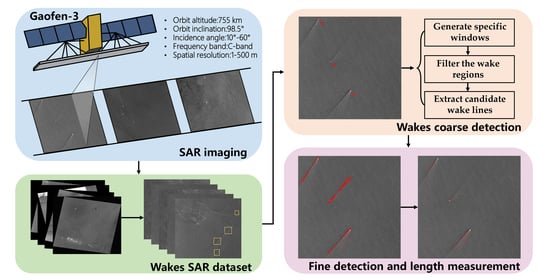
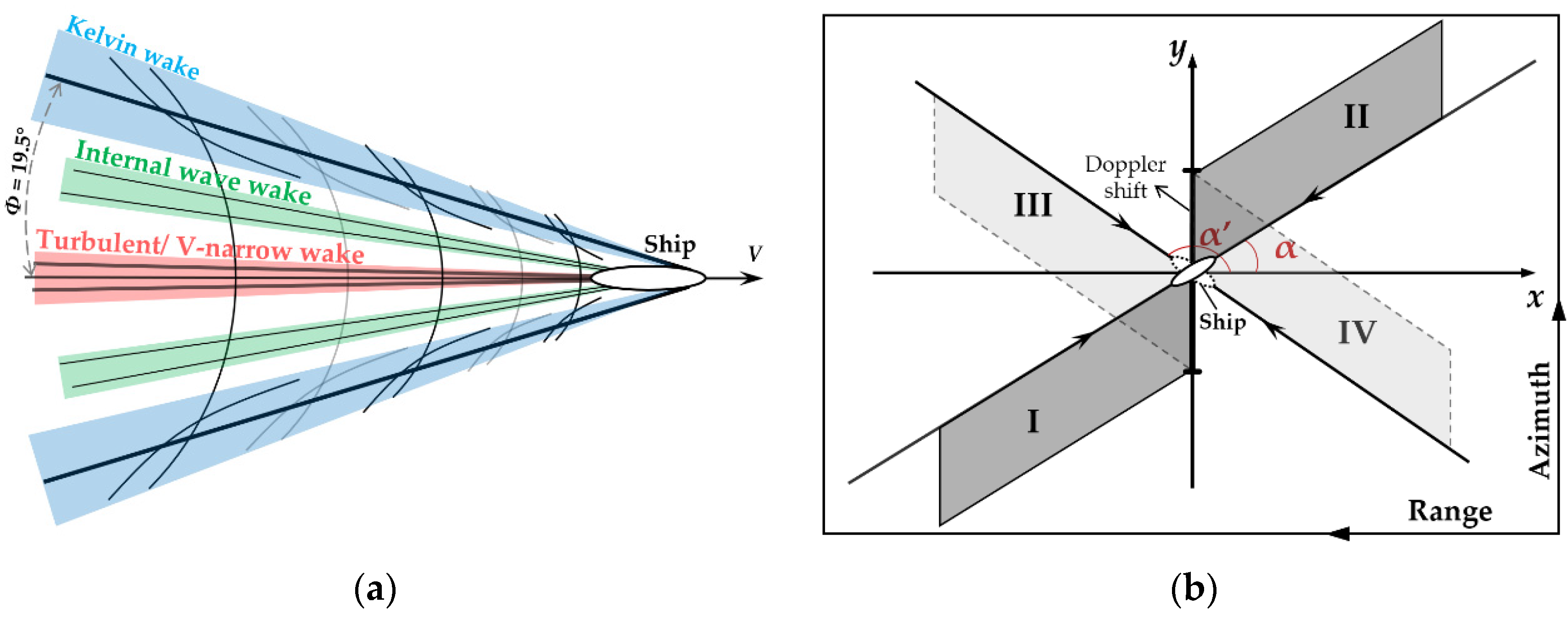
- A specific window search method different from pre-selected box generation and sliding window search is proposed for the multi-ship and multi-scale wake detection problem. Search sub-windows are generated based on a limited number of highlighted pixel regions in the image, thus greatly reducing the area to be detected.
- Combining the geometric features of the ship and the wake, we develop the correlation detection of the ship and the wake, which are detected in pairs rather than separately, and help in the inversion of the ship navigation information.
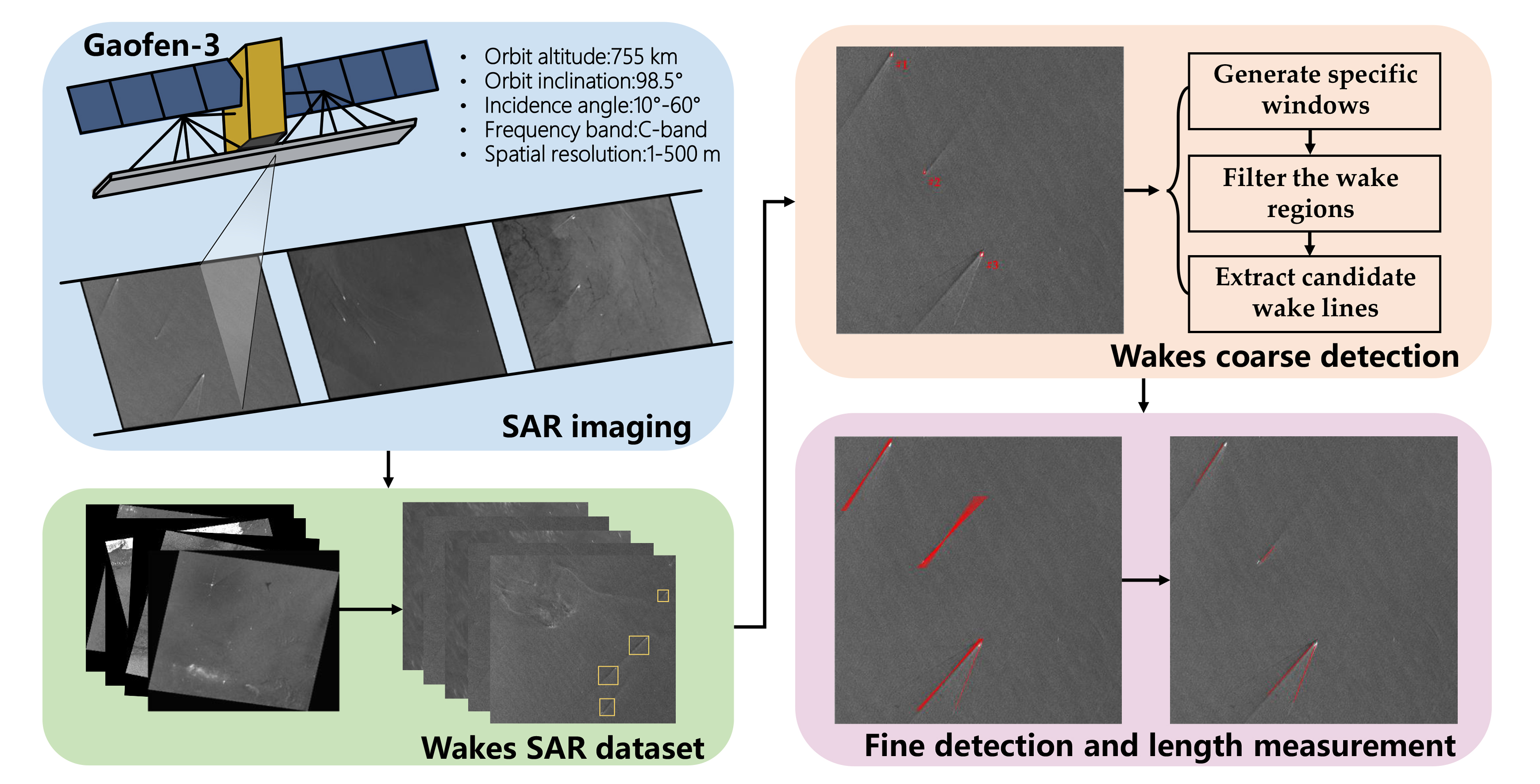
- Based on the angle characteristics between wake components, a new clustering method is proposed to locate different wake components (turbulence and Kelvin wake) of the same ship, and measure the shortest visible length of the wake.
- We create SAR wake data set containing different types of Gaofen-3 and validate our method on these data.
2. Materials and Methods
2.1. Specific Windows Search by Highlighted Pixel Points
2.2. Wake Localization Strategy
2.3. Wake Scale Measurement
3. Results
| Algorithm 1: Specific Windows Search for Wake Localization and Length Detection |
| Input: The input is a marine SAR image with ships and their wakes, as well as a variety of other noise. |
| Process: |
|
|
|
|
|
| Output: The output is a set of ship wake line positions with the wake lengths. |
3.1. Data Set
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, P.; Li, Q.; Zhang, B.; Wu, F.; Zhao, K.; Du, X.; Yang, C.; Zhong, R. On-Board Real-Time Ship Detection in HISEA-1 SAR Images Based on CFAR and Lightweight Deep Learning. Remote Sens. 2021, 13, 1995. [Google Scholar] [CrossRef]
- Ma, M.; Chen, J.; Liu, W.; Yang, W. Ship classification and detection based on CNN using GF-3 SAR images. Remote Sens. 2018, 10, 2043. [Google Scholar] [CrossRef] [Green Version]
- Yekeen, S.; Balogun, A.; Yusof, K. A novel deep learning instance segmentation model for automated marine oil spill detection. ISPRS J. Photogramm. Remote Sens. 2020, 167, 190–200. [Google Scholar] [CrossRef]
- Kang, M.; Baek, J. SAR Image Change Detection via Multiple-Window Processing with Structural Similarity. Sensors 2021, 21, 6645. [Google Scholar] [CrossRef]
- Gao, Y.; Gao, F.; Dong, J.; Wang, S. Change Detection from Synthetic Aperture Radar Images Based on Channel Weighting-Based Deep Cascade Network. IEEE J. Sel. Top. Appl. Earth Observ. 2019, 12, 4517–4529. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, G.; Zhang, C.; Atkinson, P.M.; Tan, X.; Jian, X.; Zhou, X.; Li, Y. Two-phase object-based deep learning for multi-temporal SAR image change detection. Remote Sens. 2020, 12, 548. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Shi, Z. A Spatial-Temporal Attention-Based Method and a New Dataset for Remote Sensing Image Change Detection. Remote Sens. 2020, 12, 1662. [Google Scholar] [CrossRef]
- Niedermeier, A.; Romaneessen, E.; Lehner, S. Detection of coastlines in sar images using wavelet methods. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2270–2281. [Google Scholar] [CrossRef]
- Baselice, F.; Ferraioli, G. Unsupervised coastal line extraction from sar images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1350–1354. [Google Scholar] [CrossRef]
- Ouchi, K. Recent trend and advance of synthetic aperture radar with selected topics. Remote Sens. 2013, 5, 716–807. [Google Scholar] [CrossRef] [Green Version]
- Reed, A.M.; Milgram, J.H. Ship Wakes and Their Radar Images. Annu. Rev. Fluid Mech. 2002, 34, 469–502. [Google Scholar] [CrossRef] [Green Version]
- Touzi, R.; Charbonneau, F.J.; Hawkins, R.K.; Vachon, P.W. Ship detection and characterization using polarimetric SAR. Can. J. Remote Sens. 2004, 30, 552–559. [Google Scholar] [CrossRef]
- Panico, A.; Graziano, M.D.; Renga, A. SAR-Based Vessel Velocity Estimation from Partially Imaged Kelvin Pattern. IEEE Trans. Geosci. Remote Sens. 2017, 14, 2067–2071. [Google Scholar] [CrossRef]
- Graziano, M.D.; Rufino, G.; D’Errico, M. Wake-based ship route estimation in high-resolution SAR images. Proc. SPIE Int. Soc. Opt. Eng. 2014, 9243. [Google Scholar] [CrossRef]
- Wang, J.; Ci, L. Ship’s Length Estimation from Its Wakes in Synthetic Aperture Radar Images. Trans. Beijing Inst. Technol. 2004, 24, 901–904. [Google Scholar]
- Rey, M.T.; Tunaley, J.K.; Folinsbee, J.T.; Jahans, P.A.; Dixon, J.A.; Vant, M.R. Application Of Radon Transform Techniques To Wake Detection In Seasat-A SAR Images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 553–560. [Google Scholar] [CrossRef]
- Skingley, J.; Rye, A.J. The Hough transform applied to SAR images for thin line detection. Pattern Recognit. Lett. 1987, 6, 61–67. [Google Scholar] [CrossRef]
- Kang, K.; Kim, D. Ship Velocity Estimation From Ship Wakes Detected Using Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4379–4388. [Google Scholar] [CrossRef]
- Zilman, G.; Zapolski, A.; Marom, M. The speed and beam of a ship from its wake’s SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2335–2343. [Google Scholar] [CrossRef]
- An, Q.; Pan, Z.; You, H. Ship detection in Gaofen-3 SAR images based on sea clutter distribution analysis and deep convolutional neural network. Sensors 2018, 18, 334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jin, M.K.; Chen, K.S. The application of wavelets correlator for ship wake detection in SAR images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1506–1511. [Google Scholar] [CrossRef]
- Courmontagne, P. An improvement of ship wake detection based on the radon transform. Signal Process. 2005, 85, 1634–1654. [Google Scholar] [CrossRef]
- Arnold-Bos, A.; Martin, A.; Khenchaf, A. Obtaining A Ships Speed and Direction from Its Kelvin Wake Spectrum Using Stochastic Matched Filtering. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 1106–1109. [Google Scholar]
- Biondi, F. A Polarimetric Extension of Low-Rank Plus Sparse Decomposition and Radon Transform for Ship Wake Detection in Synthetic Aperture Radar Images. IEEE Geosci. Remote Sens. Lett. 2019, 16, 75–79. [Google Scholar] [CrossRef]
- Yang, G.; Jing, Y.; Xiao, C.; Sun, W. Ship wake detection for SAR images with complex backgrounds based on morphological dictionary learning. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 20–25 March 2016; pp. 1896–1900. [Google Scholar]
- Copeland, A.C.; Ravichandran, G.; Trivedi, M.M. Localized Radon transform-based detection of ship wakes in SAR images. IEEE Trans. Geosci. Remote Sens. 1995, 33, 35–45. [Google Scholar] [CrossRef]
- Ai, J.; Qi, X.; Yu, W.; Deng, Y.; Liu, F.; Shi, L.; Jia, Y. A Novel Ship Wake CFAR Detection Algorithm Based on SCR Enhancement and Normalized Hough Transform. IEEE Geosci. Remote Sens. Lett. 2011, 8, 681–685. [Google Scholar]
- Du, G.; Yeo, T.S. A novel Radon transform-based method for ship wake detection. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; pp. 3069–3072. [Google Scholar]
- Cusano, M.; Lichtenegger, J.; Lombardo, P.; Petrocchi, A.; Zanovello, D. A real time operational scheme for ship traffic monitoring using quick look ERS SAR images. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000; pp. 2918–2920. [Google Scholar]
- Yang, G.; Yu, J.; Sun, W. Ship wake detection in SAR images with complex backgrounds based on relative total variation. J. Univ. Chin. Acad. Sci. 2017, 34, 734–742. [Google Scholar]
- Graziano, M.D. Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images. Remote Sens. 2020, 12, 2869. [Google Scholar] [CrossRef]
- Graziano, M.D.; Renga, A. Towards Automatic Recognition of Wakes Generated by Dark Vessels in Sentinel-1 Images. Remote Sens. 2021, 13, 1955. [Google Scholar] [CrossRef]
- Tings, B.; Pleskachevsky, A.; Velotto, D.; Jacobsen, S. Extension of ship wake detectability model for non-linear influences of parameters using satellite based x-band synthetic aperture radar. Remote Sens. 2019, 11, 563. [Google Scholar] [CrossRef] [Green Version]
- Tings, B.; Velotto, D. Comparison of ship wake detectability on C-band and X-band SAR. Int. J. Remote Sens. 2018, 39, 4451–4468. [Google Scholar] [CrossRef] [Green Version]
- China Ocean Satellite Data Service Center. Available online: https://osdds.nsoas.org.cn (accessed on 16 May 2021).
- Sun, Y.; Peng, L.; Jin, Y. Ship Wake Components: Isolation, Reconstruction, and Characteristics Analysis in Spectral, Spatial, and TerraSAR-X Image Domains. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4209–4224. [Google Scholar] [CrossRef]
- Fan, K.; Zhang, H.; Liang, J.; Chen, P.; Xu, B.; Zhang, M. Analysis of ship wake features and extraction of ship motion parameters from SAR images in the Yellow Sea. Front. Earth Sci. 2019, 13, 588–595. [Google Scholar] [CrossRef]
- Chen, P.; Li, X.; Zheng, G.; Zhang, H. A new method for extracting ship motion parameters in Radarsat-2 SAR imagery. Int. J. Remote Sens. 2019, 40, 5617–5634. [Google Scholar] [CrossRef]
- Hennings, I.; Romeiser, R.; Alpers, W.; Viola, A. Radar imaging of Kelvin arms of ship wakes. Int. J. Remote Sens. 1999, 20, 2519–2543. [Google Scholar] [CrossRef]
- Jen, K. Theory of synthetic aperture radar imaging of a moving target. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1984–1992. [Google Scholar]
- Yang, J.; Zhang, Y. Analysis on the azimuth shift of a moving target in SAR image. Prog. Electromagn. Res. 2015, 42, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Zilman, G.; Zapolski, A.; Marom, M. On Detectability of a Ship’s Kelvin Wake in Simulated SAR Images of Rough Sea Surface. IEEE Trans. Geosci. Remote Sens. 2015, 53, 609–619. [Google Scholar] [CrossRef]
- Rodriguez, A.; Laio, A. Clustering by fast search and find of density peaks. Science 2014, 344, 1492–1496. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Item | Parameters |
|---|---|---|
| Gaofen-3 | Orbit | Sun-synchronous orbit |
| Orbit altitude | 755 km | |
| Orbit inclination | 98.5° | |
| Revisit period | <3 days (Dual-side Looking) | |
| <1.5 days (Single-side Looking) 1 | ||
| Frequency band | C-band | |
| Incidence angle | 10°–60° | |
| Signal bandwidth | 0–240 MHz | |
| Polarization | Single/Dual/Full | |
| Imaging modes | 12 | |
| Spatial resolution | 1–500 m | |
| Swath width | 10–650 km |
| Imaging Mode | Resolution(m) | Incidence Angle (°) |
|---|---|---|
| UFS | 3 × 3 | 20–50 |
| FS-I | 5 × 5 | 19–50 |
| FS-II | 10 × 10 | 19–50 |
| Wake Detection | Prediction = 1 | Prediction = 0 |
|---|---|---|
| Actual = 1 | TP | FN |
| Actual = 0 | FP | TN |
| Wake Detection | Our Method | YOLO |
|---|---|---|
| Precision | 0.91 | 0.94 |
| Recall | 0.89 | 0.87 |
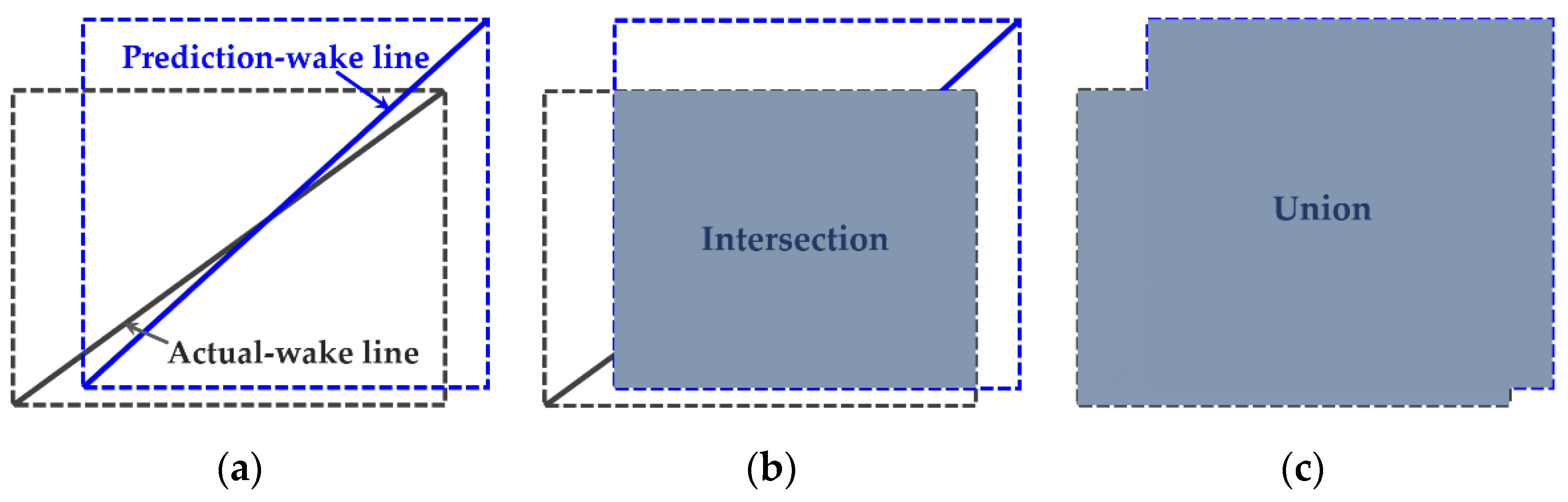
| IoU | 0.82 | 0.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, K.; Yang, J.; Wang, Z.; Ni, K.; Wang, X.; Zhou, Q. Specific Windows Search for Multi-Ship and Multi-Scale Wake Detection in SAR Images. Remote Sens. 2022, 14, 25. https://doi.org/10.3390/rs14010025
Ding K, Yang J, Wang Z, Ni K, Wang X, Zhou Q. Specific Windows Search for Multi-Ship and Multi-Scale Wake Detection in SAR Images. Remote Sensing. 2022; 14(1):25. https://doi.org/10.3390/rs14010025
Chicago/Turabian StyleDing, Kaiyang, Junfeng Yang, Zhao Wang, Kai Ni, Xiaohao Wang, and Qian Zhou. 2022. "Specific Windows Search for Multi-Ship and Multi-Scale Wake Detection in SAR Images" Remote Sensing 14, no. 1: 25. https://doi.org/10.3390/rs14010025
APA StyleDing, K., Yang, J., Wang, Z., Ni, K., Wang, X., & Zhou, Q. (2022). Specific Windows Search for Multi-Ship and Multi-Scale Wake Detection in SAR Images. Remote Sensing, 14(1), 25. https://doi.org/10.3390/rs14010025