1. Introduction
Scanning radar works as a non-coherent sensor and can be suitable for any geometry situation. Therefore, the scanning radar can be employed in many applications, such as forward-looking imaging [
1,
2,
3,
4]. In surveillance, reconnaissance, or situation awareness, high resolution is critical for forward-looking imaging. The range resolution after pulse compression is written as
where
c is the light speed, and
is the bandwidth. Scanning radar commonly transmits the linear frequency modulated (LFM) signal with a wide bandwidth to improve the range resolution [
5,
6]. In the azimuth direction, the resolution is written as
where
R denotes the range,
denotes the wavelength, and
D denotes the size of the antenna aperture. In theory, we can increase the size of the antenna aperture to enhance the angular resolution [
7,
8,
9]. However, it is infeasible due to the practical limitation. Therefore, low angular resolution hinders the forward-looking imaging quality in practical applications.
Many works suggest that the azimuth echo signal can be seen as a convolution form between the antenna pattern and the target scattering coefficient. The angular resolution can be increased by deconvolution or inverse filtering operations [
10,
11,
12]. Unfortunately, the antenna pattern is a low pass filter. In deconvolution procession, the noise amplitude in high frequency will be amplified to affect the azimuth resolution. Therefore, the direct deconvolution procession is an ill-posed problem.
To alleviate the ill-posed problem, the super-resolution methods are introduced [
13,
14,
15,
16,
17]. The regularized methods which add different prior terms to the objective function are a main class of super-resolution methods [
18,
19]. The truncated singular value decomposition (TSVD) method is adopted to improve the resolution by discarding the small singular value components [
20]. However, this method losses some information and has a low improvement in azimuth resolution. In [
21], the authors introduce the Tikhonov regularization to depress the noise. However, this method smooths the processed result, and the azimuth resolution is not much improved. In the past years, the spectral estimation methods are utilized to increase the azimuth resolution [
22,
23]. Iterative adaptive approach (IAA) and its improved method are applied for forward-looking imaging [
16,
24]. The IAA method has a good behavior to depress the noise and improve the azimuth resolution, while the computational complexity is high. To denoise and regularize sparse data, a multichannel spectral analysis method is proposed in [
25]. This method uses the
norm and the covariance matrices associated with data for denoising and reconstructing sparse signals with the aid of additional information. At the same time, the Bayesian estimation methods are utilized by maximum a posteriori (MAP) to improve the azimuth resolution [
26,
27]. In the Bayesian methods, the prior information of the imaging system is crucial [
28,
29]. Poisson distribution is considered as the prior statistical model of the noise and targets’ scattering [
30].
In the imaging region, the interest targets usually have some prior information, such as sparsity and contour information. Compared with the entire imaging area, the targets would be sparse in ship monitoring or airport surveillance. To reconstruct the sparse characteristic, the sparse regularization method is applied by selecting reasonable prior information. In [
31], the authors add an
norm term to the objective function to reconstruct the sparse target. In [
32,
33], the authors use
norm to reconstruct the sparse target of the imaging area. The authors propose a sparse spectral estimation method named sparse iterative covariance-based estimation (SPICE) in [
34]. Then, SPICE and
SPICE methods are applied for scanning radar imaging in [
17,
35], and the reconstruction result of the targets is significant. In Bayesian methods, the Laplace prior distribution is commonly chosen as the statistical model for the prior information of the sparse targets [
36,
37,
38]. In some applications, we intend to get the precise contour information of the target, such as in autopilot or autonomous landing of aircraft. Therefore, obtaining the contour information of the target is one of main purposes of forward-looking imaging. The TV regularization is usually used to highlight the contour information by minimizing the difference value between adjacent points in the image procession region [
39]. In [
40,
41], the authors introduce the TV prior to estimate the target in forward-looking imaging, and the performance is significant.
For sea-surface monitoring, the prior information of the imaging environment also requires attention. When the imaging scene is the sea-surface, sea clutter would influence the quality of the reconstruction result. In [
42], the authors attempted to use the full-polarization method to deal with the detection of small floating target on sea-surface. By using the full-polarization information to detect sea-surface target, the information received by radar can be fully used, and the detection performance is effective. Computer vision combined with image processing technology is introduced to realize the sea-surface monitoring in recent years. Liu at al. [
43] show that the sea-surface target detection based on improved YOLOv3 has high accuracy. In forward-looking imaging, Zhang et al. [
44] use the Rayleigh distribution to model the sea clutter. At the seacoast, the ground clutter and the sea clutter will influence the reconstruction result together. A single clutter distribution is insufficient to characterize the clutter in this scenario. In [
45], to characterize the interference of the clutter and noise, the GMM is introduced. However, this method does not do well at preserving the contour information.
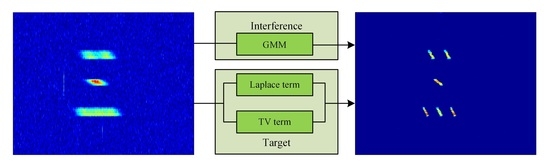
In this paper, we propose a multi-prior Bayesian method which considers the imaging environment and fuses the sparsity and the contour information of the sea-surface target. Firstly, we utilize GMM to describe the interference since we assume the interference distribution is constructed from various simple Gaussian distributions. Subsequently, by adjusting the means, variances, and the mixing coefficient of Gaussian distributions, the interference model gets more flexible to describe the clutter and noise. Secondly, we propose a multi-prior distribution to express the target via fusing the Laplace prior and the TV prior. By adjusting the weighted parameters of the Laplace prior and the TV prior, the multi-prior not only describes the sparsity of the target but also preserves the contour information. Third, we introduce the latent variable to simplify the logarithm likelihood function. Finally, we estimate the parameters by introducing the MAP-EM method.
The article is organized as follows. In
Section 2, we analyze the azimuth signal model. In
Section 2, we propose a multi-prior Bayesian model for sea-surface target to estimate the imaging parameters. In
Section 3, several experiments are shown to verify the effectiveness of the multi-prior Bayesian method. In
Section 4, we discuss the shortcoming and the future research directions of the multi-prior Bayesian method. Finally, the conclusions are drawn in
Section 5.
4. Discussion
In the forward-looking imaging of sea-surface target, the suitable model of the imaging environment plays an important role. However, most methods focus on the system noise and ignore the particular characteristics of the environment of the sea-surface target. Thus, only the Gaussian noise is considered. The multi-prior Bayesian method considers the characteristics of the environment of the sea-surface target, and proposes to use the GMM to model the clutter in the imaging scene. On the other hand, the sea-surface target also has many characteristics. For example, compared with the whole imaging scene, the target is sparse. In the autonomous landing on a ship, the counter information is important to influence the landing precision. The multi-prior Bayesian method fuses the sparsity and counter information to model the sea-surface target by introducing the Laplace prior and TV prior. Therefore, combining with the environment clutter and the target model, the multi-prior method can perform well in target recovery and clutter suppression. For the visual and quantitative results obtained in
Section 3, the simulations and semi-real data processing results are presented to show the performance of the multi-prior Bayesian method. Compared with the traditional methods, the multi-prior method has a better performance both in the sea-surface scene and the seacoast scene.
In practical application, real time is crucial. The computation complexity of the multi-prior Bayesian method is mainly determined by the length of the echo signal M, the length of scanning points in azimuth direction K, the number of Gaussian distribution J. In E-step, computing the posterior probability needs . In M-step, computing the parameters , and u requires . Computing the parameter requires computing the inverse matrix. The computational complexity to calculate the inverse matrix is . The overall computation complexity is concentrated in calculating the parameter . To improve the imaging speed, we will find an improved algorithm to reduce the computational complexity to calculate the inverse matrix.
In the multi-prior Bayesian method, the weighted parameter is utilized to balance the Laplace term and the TV term. However, we need to manually pick the appropriate weighted parameter in the imaging procession. Future work will also research how to select the weighted parameter adaptively.
The high resolution in range direction is realized by the pulse compress technique. We only consider realizing the high resolution in the azimuth direction. Only one-dimensional prior information is exploited. However, two-dimensional prior information of the target can provide more structure information. In the future, two-dimensional prior information of the target is encouraged to study.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}