
Deep Convolutional Neural Network for Rice Density Prescription Map at Ripening Stage Using Unmanned Aerial Vehicle-Based Remotely Sensed Images


Abstract
:1. Introduction
2. Materials and Methods
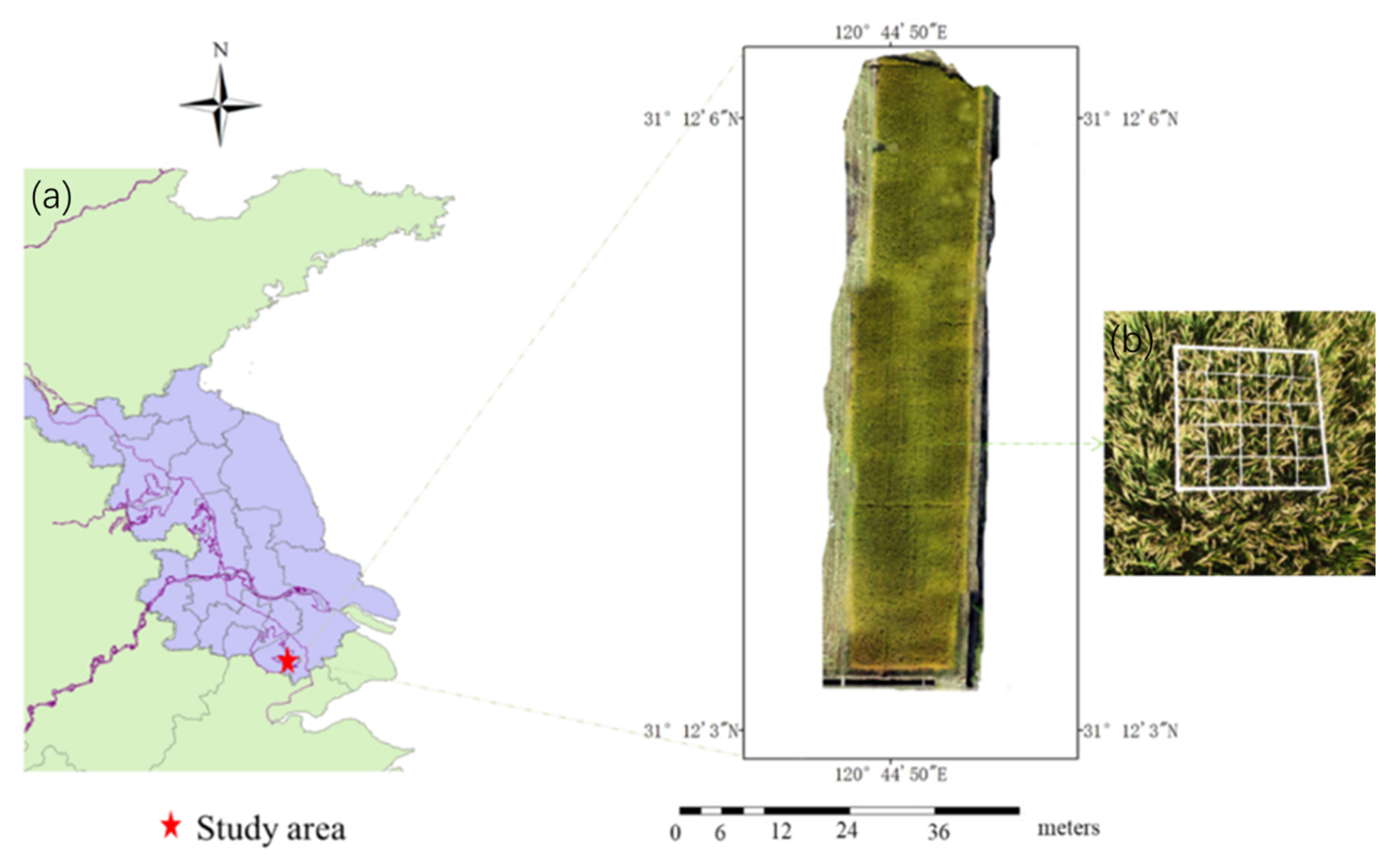
2.1. Study Area
2.2. Images Acquisition
2.3. Mature Rice Image Processing
2.3.1. Mature Rice Orthoimage Map
2.3.2. Geographic Coordinate Extraction and Clipping
2.4. Traditional Image Processing Technology
2.5. CNN Architecture Design
2.5.1. YOLOv4 Network Structure
2.5.2. Training and Testing
2.6. Result Evaluation
3. Results
3.1. Statistical Analysis of Density Data
3.2. Regression Analysis between Connected Domain and Mature Rice Density
3.3. Estimation of Rice Density Using CNN
3.4. Robustness of CNN
3.5. Density Prescription Map Generation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| YOLO | You Only Look Once |
| AP | Average Precision |
| MAP | Mean Average Precision |
| SVM | Support Vector Machine |
| CNN | Convolutional Neural Network |
| BN | Batch Normalization |
| CBM | Conv + BN + Mish |
| CSP | Cross Stage Partial |
| CBL | Conv + BN + Leaky Relu |
| SPP | Spatial Pyramid Pooling |
References
- United Nations. Transforming Our World: The 2030 Agenda for Sustainable Development; United Nations, Department of Economic and Social Affairs: New York, NY, USA, 2015. [Google Scholar]
- Kathuria, H.; Giri, J.; Tyagi, H.; Tyagi, A. Advances in transgenic rice biotechnology. Crit. Rev. Plant Sci. 2007, 26, 65–103. [Google Scholar] [CrossRef]
- Dong, J.W.; Xiao, X.M.; Kou, W.L.; Qin, Y.W.; Zhang, G.L.; Li, L.; Jin, C.; Zhou, Y.T.; Wang, J.; Biradarf, C.; et al. Tracking the dynamics of paddy rice planting area in 1986–2010 through time series Landsat images and phenology-based algorithms. Remote Sens. Environ. 2015, 160, 99–113. [Google Scholar] [CrossRef]
- Rosegrant, M.W. Water resources in the twenty-first century: Challenges and implications for action. In Food, Agriculture, and the Environment Discussion Paper 20; IFPRI: Washington, DC, USA, 1997; p. 27. [Google Scholar]
- Xu, X.M.; LI, G.; Su, Y.; Wang, X.L. Effect of weedy rice at different densities on photosynthetic characteristics and yield of cultivated rice. Photosynthetica 2018, 56, 520–526. [Google Scholar] [CrossRef]
- Long, S.P.; Zhu, X.G.; Naidu, S.L.; Ort, D.R. Can improvement in photosynthesis increase crop yield? Plant Cell Environ. 2006, 29, 315–330. [Google Scholar] [CrossRef] [PubMed]
- Chen, D.; Wang, S.M.; Kang, F.; Zhu, Q.Y.; Li, X.H. Mathematical model of feeding rate and processing loss for combine harvester. Trans. Chin. Soc. Agric. Eng. 2011, 27, 18–21. [Google Scholar]
- Liang, Z.W.; Li, Y.M.; Zhao, Z.; Xu, L.Z.; Tang, Z. Monitoring Mathematical Model of Grain Cleaning Losses on Longitudinal-axial Flow Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2015, 46, 106–111. [Google Scholar]
- Zeng, Y.J.; Lu, W.S.; Shi, Q.H.; Tan, X.M.; Pan, X.H.; Shang, Q.Y. Study on Mechanical Harvesting Technique for Loss Reducing of Rice. Crops 2014, 6, 131–134. [Google Scholar]
- Mao, H.P.; Liu, W.; Han, L.H.; Zhang, X.D. Design of intelligent monitoring system for grain cleaning losses based on symmetry. Sensors 2012, 28, 34–39. [Google Scholar]
- Chen, J.; Ning, X.; Li, Y.; Yang, G.; Wu, P.; Chen, S. A Fuzzy Control Strategy for the Forward Speed of a Combine Harvester Based on Kdd. Appl. Eng. Agric. 2017, 33, 15–22. [Google Scholar] [CrossRef]
- Lu, W.T.; Liu, B.; Zhang, D.X.; Li, J. Experiment and feed rate modeling for combine harvester. Trans. Chin. Soc. Agric. Mach. 2011, 42, 82–85. (In Chinese) [Google Scholar]
- Maertens, K.; Ramon, H.; De Baerdemaeker, J. An on-the-go monitoring algorithm for separation processes in combine harvesters. Comput. Electron. Agric. 2014, 43, 197–207. [Google Scholar] [CrossRef]
- Lu, W.T.; Zhang, D.X.; Deng, Z.G. Constant load PID control of threshing cylinder in combine. Trans. Chin. Soc. Agric. Mach. (In Chinese). 2008, 39, 49–55. [Google Scholar]
- Liu, Y.B.; Li, Y.M.; Chen, L.P.; Zhang, T.; Liang, Z.W.; Huang, M.S.; Su, Z. Study on Performance of Concentric Threshing Device with Multi-Threshing Gaps for Rice Combines. Agriculture 2021, 11, 1000. [Google Scholar] [CrossRef]
- Qin, Y. Study on Load Control System of Combined Harvester. Ph.D. Thesis, Jiangsu University, Zhenjiang, China, 2012. (In Chinese). [Google Scholar]
- Da Cunha, J.P.A.R.; Piva, G.; de Oliveira, C.A.A. Effect of the Threshing System and Harvester Speed on the Quality of Soybean Seeds. Biosci. J. 2009, 25, 37–42. [Google Scholar] [CrossRef]
- Lin, W.; Lù, X.M.; Fan, J.R. A Combinational Threshing and Separating Unit of Combine Harvester with a Transverse Tangential Cylinder and an Axial Rotor. Trans. Chin. Soc. Agric. Mach. 2014, 45, 105–108. [Google Scholar]
- Yuan, J.B.; Li, H.; Qi, X.D.; Hu, T.; Bai, M.C.; Wang, Y.J. Optimization of airflow cylinder sieve for threshed rice separation using CFD-DEM. Eng. Appl. Comp. Fluid Mech. 2020, 14, 871–881. [Google Scholar] [CrossRef]
- Junsiri, J.; Chinsuwan, W. Prediction equations for header losses of combine harvesters when harvesting Thai Home Mali rice. Songklanakarin. J. Sci. Technol. 2010, 6, 613–620. Available online: http://www.sjst.psu.ac.th (accessed on 9 August 2021).
- Omid, M.; Lashgari, M.; Mobli, H.; Alimardani, R.; Mohtasebi, S.; Hesamifard, R. Design of fuzzy logic control system incorporating human expert knowledge for combine harvester. Expert Syst. Appl. 2010, 37, 7080–7085. [Google Scholar] [CrossRef]
- Hiregoudar, S.; Udhaykumar, R.; Ramappa, K.T.; Shreshta, B.; Meda, V.; Anantachar, M. Artificial neural network for assessment of grain losses for paddy combine harvester a novel approach. Control. Comput. Inform. Syst. 2011, 140, 221–231. [Google Scholar] [CrossRef]
- Eroglu, M.C.; Ogut, H.; Turker, U. Effects of some operational parameters in combine harvesters on grain loss and comparison between sensor and conventional measurement method. Energy Educ. Sci. Technol. Part A Energy Sci. Res. 2011, 28, 497–504. [Google Scholar]
- Zhao, F.; Wang, K.J.; Yuan, Y.C. Research on wheat ear recognition based on color feature and AdaBoost algorithm. Crops 2014, 1, 141–144. [Google Scholar] [CrossRef]
- Reza, M.N.; Na, I.S.; Baek, S.W.; Lee, K.H. Rice yield estimation based on K-means clustering with graph-cut segmentation using low-altitude UAV images. Bioprocess Eng. 2019, 177, 109–121. [Google Scholar] [CrossRef]
- Yi, F.; Moon, I. Image segmentation: A survey of graph-cut methods. In Proceedings of the International Conference on Systems and Informatics (ICSAl), Yantai, China, 19–20 May 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1936–1941. [Google Scholar] [CrossRef]
- Cao, Y.L.; Lin, M.T.; Guo, Z.H.; Xiao, W.; Ma, D.R.; Xu, T.Y. Unsupervised GMM Rice UAV Image Segmentation Based on Lab Color Space. J. Agric. Mach. 2021, 52, 162–169. [Google Scholar] [CrossRef]
- Li, P. Research on Wheat Ear Recognition Technology Based on UAV Image. Master’s Thesis, Henan Agricultural University, Henan, China, 2019. [Google Scholar] [CrossRef]
- Osco, L.P.; Arrudab, M.S.; Junior, J.M.; Silva, N.B.; Ramos, A.P.M.; Moryia, É.A.S.; Imai, N.N.; Pereira, D.R.; Creste, J.E.; Matsubara, E.T.; et al. A convolutional neural network approach for counting and geolocating citrus-trees in UAV multispectral imagery. ISPRS-J. Photogramm. Remote Sens. 2020, 160, 97–106. [Google Scholar] [CrossRef]
- Xiong, J.T.; Liu, Z.; Chen, S.M.; Liu, B.L.; Zheng, Z.H.; Zhong, Z.; Yang, Z.G.; Peng, H.X. Visual detection of green mangoes by an unmanned aerial vehicle in orchards based on a deep learning method. Biosyst. Eng. 2020, 194, 261–272. [Google Scholar] [CrossRef]
- Lu, H.; Cao, Z.; Xiao, Y. TasselNet: Counting maize tassels in the wild via local counts regression network. Plant Methods 2017, 13, s13007–s13017. [Google Scholar] [CrossRef] [Green Version]
- Petteri, N.; Nathaniel, N.; Tarmo, L. Crop yield prediction with deep convolutional neural networks. Comput. Electron. Agric. 2019, 163, 1–9. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.S.; Han, J.Y.; Zha, Y.Y.; Zhu, P.H. Deep convolutional neural networks for rice grain yield estimation at the ripening stage using UAV-based remotely sensed images. Field Crop. Res. 2019, 235, 142–153. [Google Scholar] [CrossRef]
- Ghazi, M.M.; Yanikoglub, A.E. Plant identification using deep neural networks via optimization of transfer learning parameters. Neurocomputing 2017, 235, 228–235. [Google Scholar] [CrossRef]
- Dyrmannm, K.; Karstoft, H.; Midtiby, H.S. Plant species classification using deep convolutional neural network. Biosyst. Eng. 2016, 151, 72–80. [Google Scholar] [CrossRef]
- Vaibhav, T.; Rakesh, C.J.; Malay, K.D. Dense convolutional neural networks based multiclass plant disease detection and classification using leaf images. Ecol. Inform. 2021, 63, 101289. [Google Scholar] [CrossRef]
- Bedi, P.; Gole, P. Plant disease detection using hybrid model based on convolutional autoencoder and convolutional neural network. Artif. Intell. Agric. 2021, 5, 90–101. [Google Scholar] [CrossRef]
- Muppala, C.; Guruviah, V. Detection of leaf folder and yellow stem borer moths in the paddy field using deep neural network with search and rescue optimization. Inf. Process. Agric. 2021, 8, 350–358. [Google Scholar] [CrossRef]
- Wang, D.F.; Wang, J.; Li, W.R.; Guan, P. T-CNN: Trilinear convolutional neural networks model for visual detection of plant diseases. Comput. Electron. Agric. 2021, 190, 106468. [Google Scholar] [CrossRef]
- Alexander, J.; Artzai, P.; Aitor, A.G.; Jone, E.; Sergio, R.V.; Ana, D.N.; Amaia, O.B. Automatic plant disease diagnosis using mobile capture devices, applied on a wheat use case. Comput. Electron. Agric. 2017, 138, 200–209. [Google Scholar] [CrossRef]
- Li, W.Y.; Wang, D.J.; Li, M.; Gao, Y.L.; Wu, J.W.; Yang, X.T. Field detection of tiny pests from sticky trap images using deep learning in agricultural greenhouse. Comput. Electron. Agric. 2021, 183, 106048. [Google Scholar] [CrossRef]
- Wang, Q.L.; Zhang, S.Y.; Dong, S.F.; Zhang, G.C.; Yang, J.; Li, R.; Wang, H.Q. Pest24: A large-scale very small object data set of agricultural pests for multi-target detection. Comput. Electron. Agric. 2020, 175, 105585. [Google Scholar] [CrossRef]
- Liao, L.; Dong, S.F.; Zhang, S.Y.; Xie, C.J.; Wang, H.G. AF-RCNN: An anchor-free convolutional neural network for multi-categories agricultural pest detection. Comput. Electron. Agric. 2020, 174, 105522. [Google Scholar] [CrossRef]
- Lu, Y.; Yi, S.J.; Zeng, N.Y.; Liu, Y.R.; Zhang, Y. Identification of rice diseases using deep convolutional neural networks. Neurocomputing 2017, 267, 378–384. [Google Scholar] [CrossRef]
- Ubbens, J.; Cieslak, M.; Prusinkiewicz, P.; Stavness, I. The use of plant models in deep learning: An application to leaf counting in rosette plants. Plant Methods 2018, 14, 6–15. [Google Scholar] [CrossRef] [Green Version]
- Xiong, X.; Duan, L.; Liu, L.; Tu, H.; Yang, P.; Wu, D.; Chen, G.; Yang, W.; Liu, Q. Panicle-SEG: A robust image segmentation method for rice panicles in the field based on deep learning and super pixel optimization. Plant Methods 2017, 13, 104–118. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Wang, D.; Zhang, Z. Weed identification based on K-means feature learning combined with convolutional neural network. Comput. Electron. Agric. 2017, 135, 63–70. [Google Scholar] [CrossRef]
- Alessandro, D.S.F.; Daniel, M.F.; Gercina, G.D.S.; Hemerson, P.; Marcelo, T.F. Weed detection in soybean crops using ConvNets. Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Borja, E.G.; Nikolaos, M.; Loukas, A.; Spyros, F. Improving weeds identification with a repository of agricultural pre-trained deep neural networks. Comput. Electron. Agric. 2020, 175, 105593. [Google Scholar] [CrossRef]
- Mruβwurm, M.; Korner, M. Multi-Temporal Land Cover Classification with Long Short-Term Memory Neural Networks; Isprs Hannover Workshop: Hannover, Germany, 2017. [Google Scholar] [CrossRef] [Green Version]
- Kamilarisa, A.; FrancescX, P.B. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Zhou, J.F.; Ye, H.; Ali, M.L.; Chen, P.Y.; Nguyen, H.T. Yield estimation of soybean breeding lines under drought stress using unmanned aerial vehicle-based imagery and convolutional neural network. Biosyst. Eng. 2021, 204, 90–103. [Google Scholar] [CrossRef]
- Zhou, G.X.; Zhang, W.Z.; Chen, A.B.; He, M.F.; Ma, X.S. Rapid Detection of Rice Disease Based on FCM-KM and Faster R-CNN Fusion. IEEE Access 2019, 7, 143190–143206. [Google Scholar] [CrossRef]
- Yu, L.J.; Shi, J.W.; Huang, C.L.; Duan, L.F.; Wu, D.; Fu, D.B.; Wu, C.Y.; Xiong, L.Z.; Yang, W.N.; Liu, Q. An integrated rice panicle phenotyping method based on X-ray and RGB scanning and deep learning. Crop J. 2021, 9, 42–56. [Google Scholar] [CrossRef]
- Cao, J.; Zhang, Z.; Tao, F.L.; Zhang, L.L.; Luo, Y.C.; Zhang, J.; Han, J.C.; Xie, J. Integrating Multi-Source Data for Rice Yield Prediction across China using Machine Learning and Deep Learning Approaches. Agric. For. Meteorol. 2021, 297, 108275. [Google Scholar] [CrossRef]
- Chen, P. Optimization algorithms on subspaces: Revisiting missing data problem in low-rank matrix. Int. J. Comput. Vis. 2008, 80, 125–142. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Dhanesha, R.; Naika, C.L.S. Segmentation of Arecanut Bunches using HSV Color Model. In Proceedings of the 3rd International Conference on Electrical, Electronics, Communication, Computer Technologies and Optimization Techniques (IGEECCOT), Msyuru, India, 14–15 December 2018; pp. 37–41. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.F.; Shi, J.P.; Jia, J.Y. Path Aggregation Network for Instance Segmentation. In Proceedings of the 31st IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 December 2018; pp. 8759–8768. [Google Scholar] [CrossRef] [Green Version]
- Sutskever, I.; Martens, J.; Dahl, G.; Hinton, G. On the importance of initialization and momentum in deep learning. In Proceedings of the 30th International Conference on Machine Learning, Atlanta, GA, USA, 17–19 June 2013. [Google Scholar] [CrossRef]
- Cao, Y.L.; Liu, Y.D.; Ma, D.R.; Li, A.; Xu, T.Y. Best Subset Selection Based Rice Panicle Segmentation from UAV Image. Trans. Chin. Soc. Agric. Mach. 2020, 51, 171–177. [Google Scholar] [CrossRef]
- Xiong, X. Research on Field Rice Panicle Segmentation and Non-Destructive Yield Prediction Based on Deep Learning. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2018. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Sensor | Number of Images | Altitude (m) | Ground Resolution (mm) |
|---|---|---|---|---|
| 08 November 2020 | RGB | 102 | 5 | 2.3 |
| 09 November 2020 | RGB | 112 | 5 | 2.3 |
| 10 November 2020 | RGB | 103 | 5 | 2.3 |
| 11 November 2020 | RGB | 107 | 5 | 2.3 |
| 12 November 2020 | RGB | 111 | 5 | 2.3 |
| Method | Heathy Rice | Rice with Disease Infection | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| connected domain (RGB) connected domain (HSV) | Line | Quadratic | Line | Quadratic | |||||||||
| R2 | RMSE | MAPE | R2 | RMSE | MAPE | R2 | RMSE | MAPE | R2 | RMSE | MAPE | ||
| Number | 0.101 | 1.212 | 0.137 | 0.171 | 1.692 | 0.182 | 0.001 | 1.683 | 0.180 | 0.154 | 1.116 | 0.138 | |
| Area | 0.172 | 1.104 | 0.123 | 0.150 | 2.019 | 0.179 | 0.006 | 1.678 | 0.179 | 0.000 | 0.436 | 0.126 | |
| Perimeter | 0.201 | 0.983 | 0.107 | 0.035 | 1.654 | 0.181 | 0.002 | 1.683 | 0.182 | 0.000 | 1.362 | 0.131 | |
| Number | 0.396 | 1.602 | 0.171 | 0.207 | 1.500 | 0.153 | 0.140 | 0.984 | 0.133 | 0.301 | 0.684 | 0.098 | |
| Area | 0.275 | 1.434 | 0.144 | 0.236 | 1.338 | 0.133 | 0.062 | 1.175 | 0.138 | 0.000 | 2.234 | 0.280 | |
| Perimeter | 0.207 | 1.500 | 0.154 | 0.115 | 1.585 | 0.146 | 0.176 | 1.101 | 0.132 | 0.000 | 2.012 | 0.248 | |
| Method | Rice Ear Segmentation Accuracy | Rice Ears Number Predicting Accuracy |
|---|---|---|
| SVM | 0.5183 | 0.0817 |
| K-means | 0.7109 | 0.1949 |
| Manual segmentation | 1 | 0.2541 |
| Test Data Type | Model | |||
|---|---|---|---|---|
| mAP (%) | R2 | RMSE | MAPE | |
| No infection rice images | 95.42 | 0.841 | 0.837 | 0.055 |
| Mild infection rice images | 98.84 | 0.844 | 1.001 | 0.107 |
| Moderate infection rice images | 94.35 | 0.735 | 2.387 | 0.188 |
| Severe infection rice images | 93.36 | 0.712 | 1.414 | 0.154 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, L.; Luo, Y.; Xu, L.; Zhang, Q.; Cai, Q.; Shen, M. Deep Convolutional Neural Network for Rice Density Prescription Map at Ripening Stage Using Unmanned Aerial Vehicle-Based Remotely Sensed Images. Remote Sens. 2022, 14, 46. https://doi.org/10.3390/rs14010046
Wei L, Luo Y, Xu L, Zhang Q, Cai Q, Shen M. Deep Convolutional Neural Network for Rice Density Prescription Map at Ripening Stage Using Unmanned Aerial Vehicle-Based Remotely Sensed Images. Remote Sensing. 2022; 14(1):46. https://doi.org/10.3390/rs14010046
Chicago/Turabian StyleWei, Lele, Yusen Luo, Lizhang Xu, Qian Zhang, Qibing Cai, and Mingjun Shen. 2022. "Deep Convolutional Neural Network for Rice Density Prescription Map at Ripening Stage Using Unmanned Aerial Vehicle-Based Remotely Sensed Images" Remote Sensing 14, no. 1: 46. https://doi.org/10.3390/rs14010046
APA StyleWei, L., Luo, Y., Xu, L., Zhang, Q., Cai, Q., & Shen, M. (2022). Deep Convolutional Neural Network for Rice Density Prescription Map at Ripening Stage Using Unmanned Aerial Vehicle-Based Remotely Sensed Images. Remote Sensing, 14(1), 46. https://doi.org/10.3390/rs14010046