
Spatiotemporal Filtering for Continuous GPS Coordinate Time Series in Mainland China by Using Independent Component Analysis


Abstract
:1. Introduction
2. GPS Data and Time Series Analysis
2.1. GPS Data and Processing
2.2. GPS Coordinate Time Series Fitting
2.3. Spatiotemporal Filtering Using ICA
3. Results
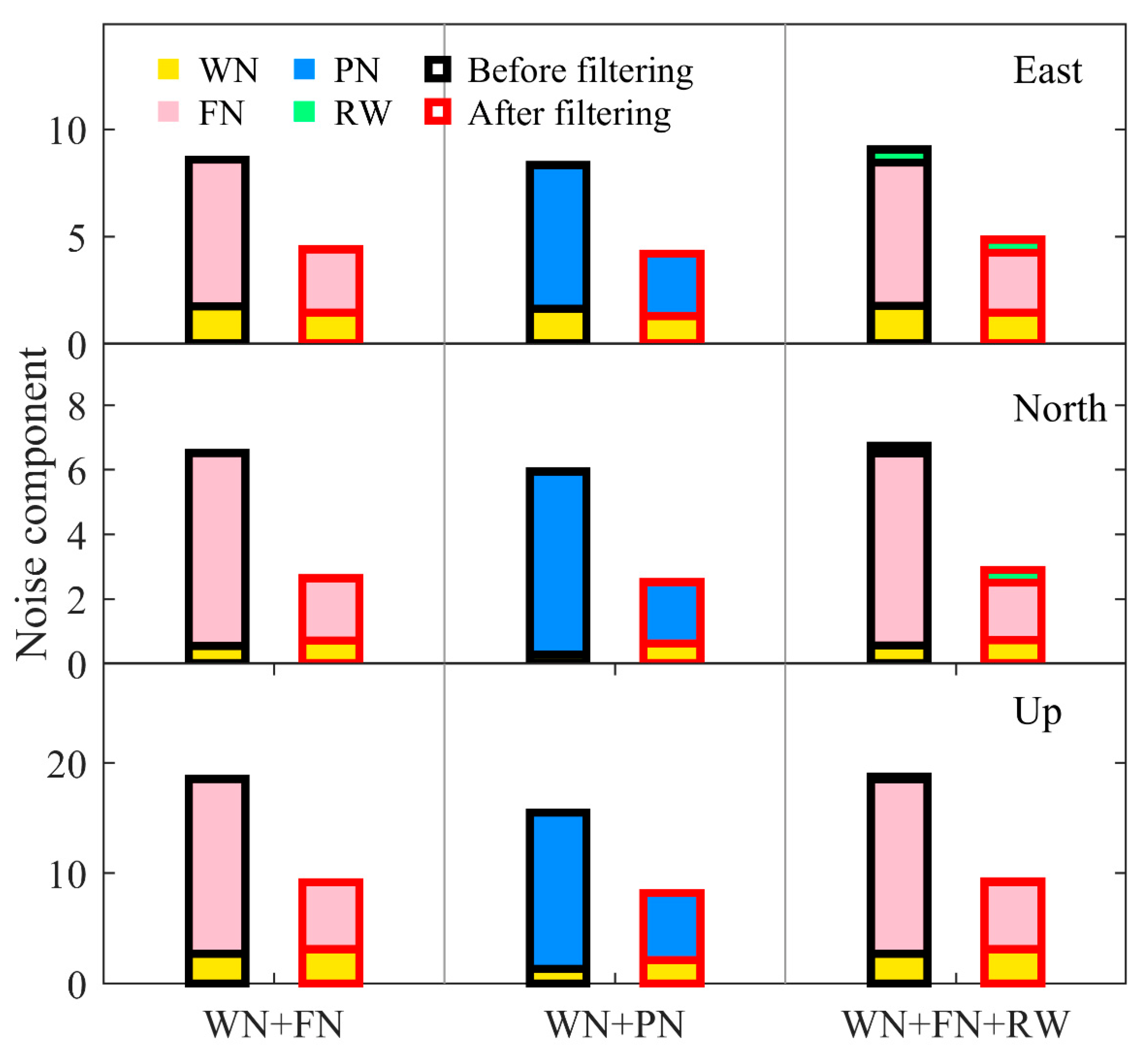
3.1. The Optimal Noise Model
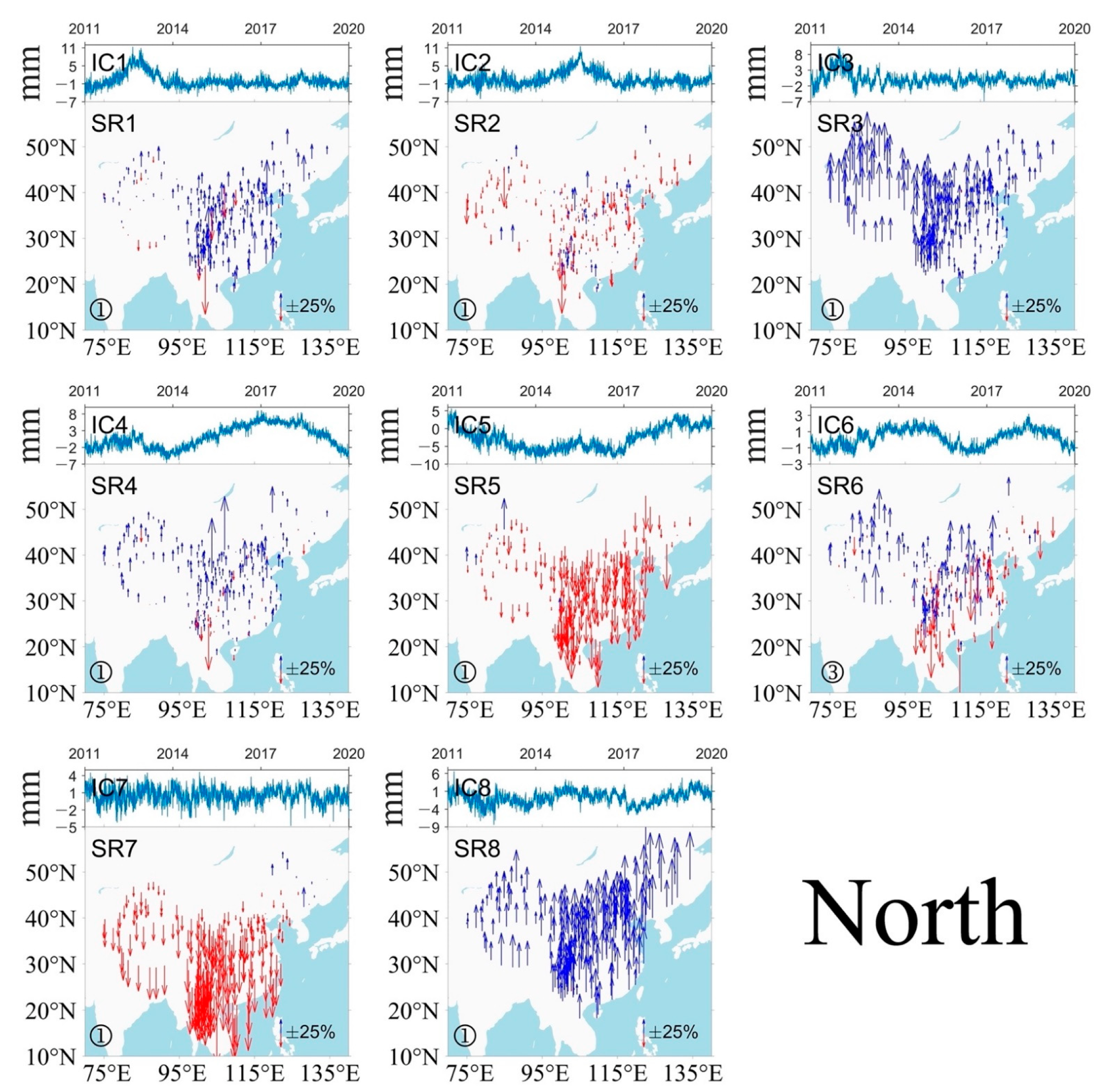
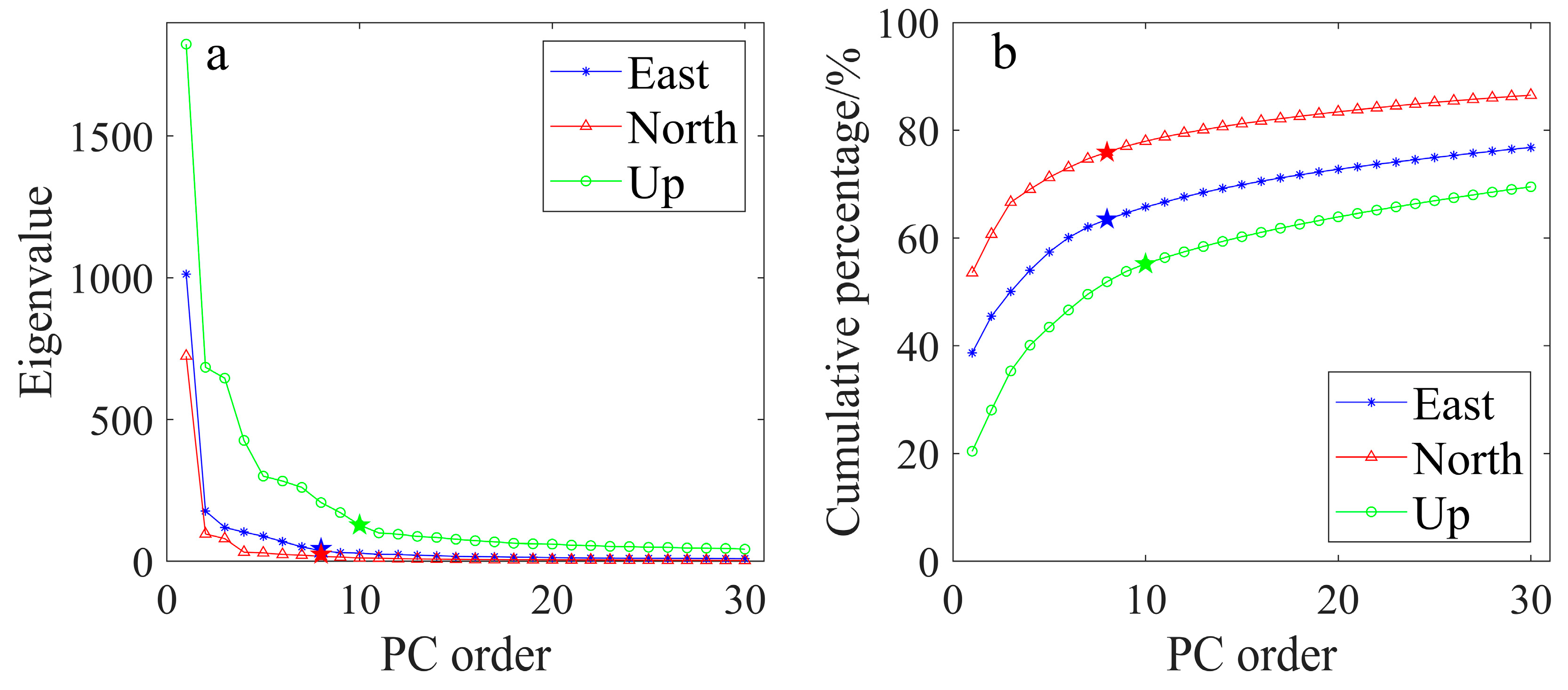
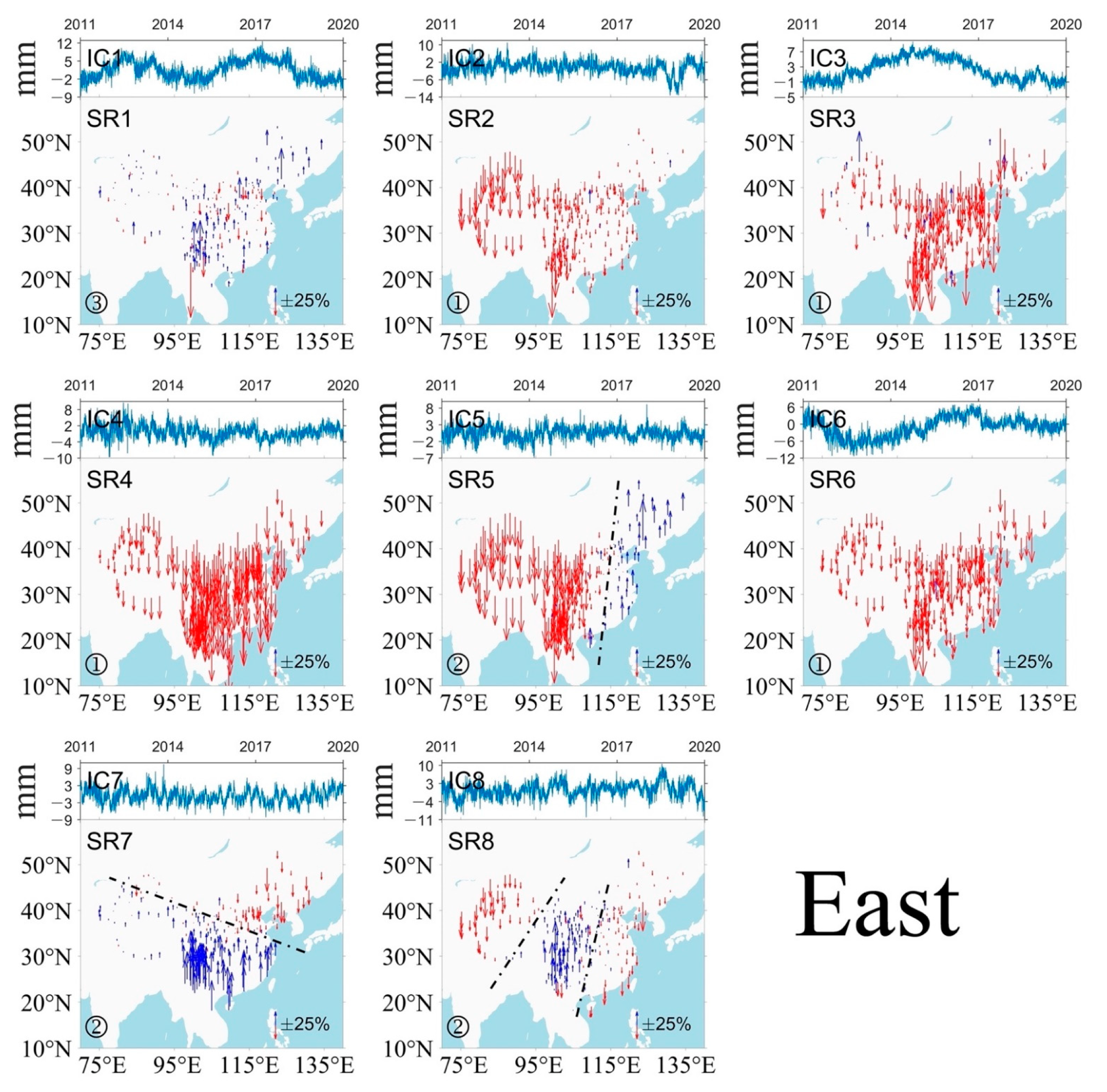
3.2. CME Extraction
4. Discussion
4.1. Characteristics of CME and Its Possible Sources
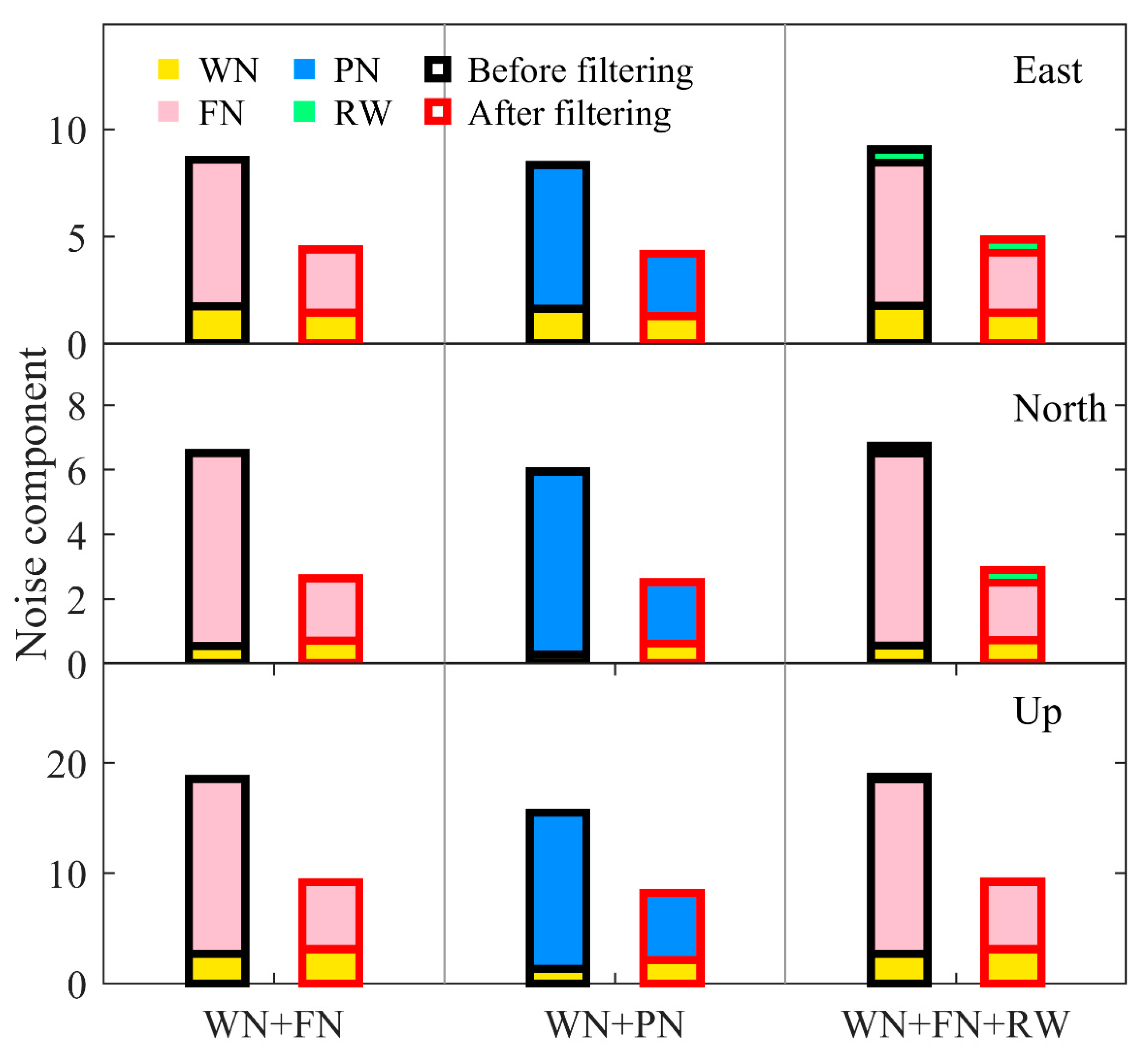
4.2. The Effect of CME on the Noise Model
4.3. The Influence of CME and Noise Model on the Estimation of Crustal Movement Velocity
5. Conclusions
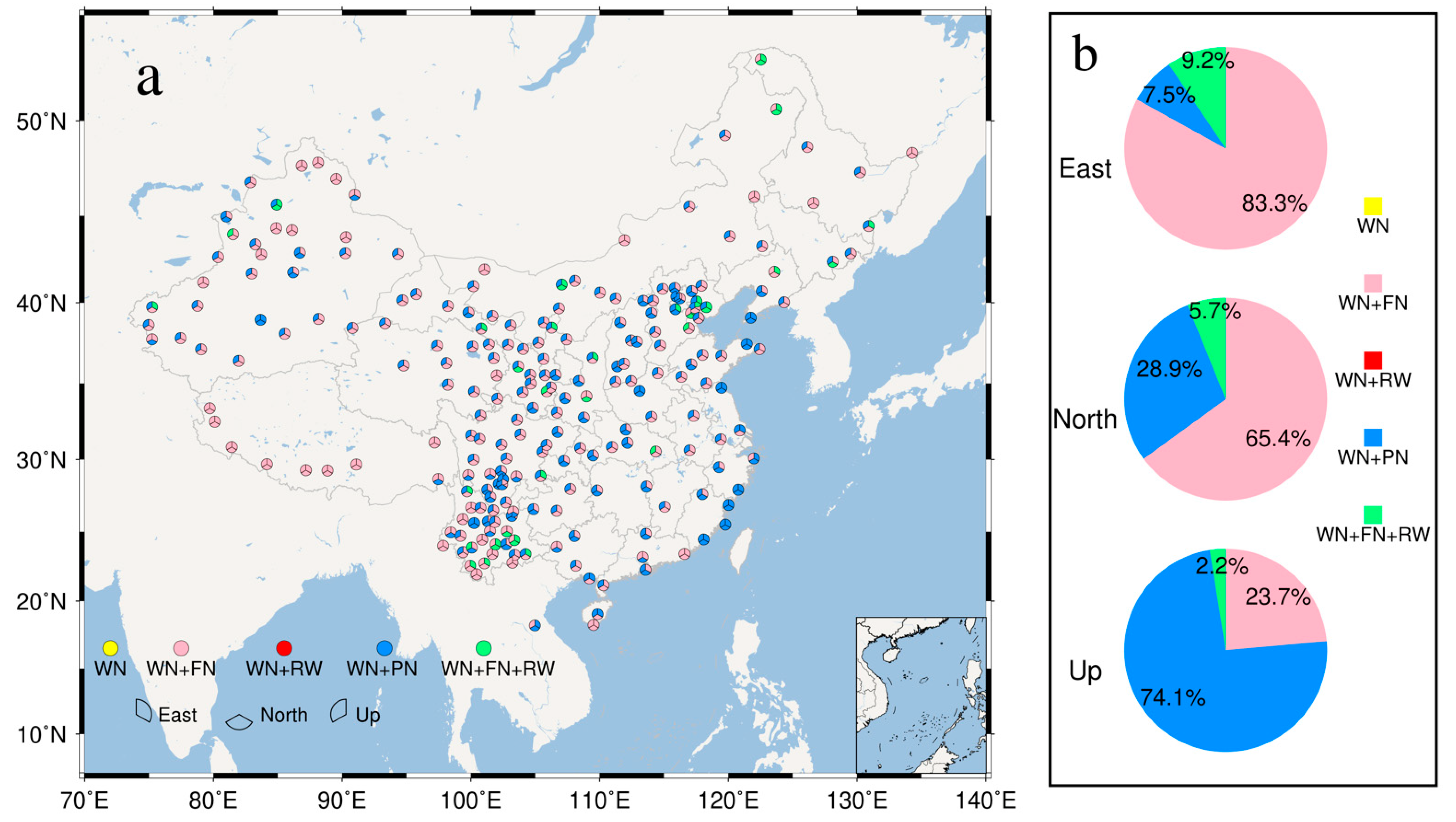
- The optimal noise models of GPS coordinate time series from CMONOC are mainly characterised by WN + FN and WN + PN. The mean velocity uncertainty estimated in the optimal noise model is about 10 times larger than that in the assumption of WN only, implying the WN model underestimates the velocity uncertainty.
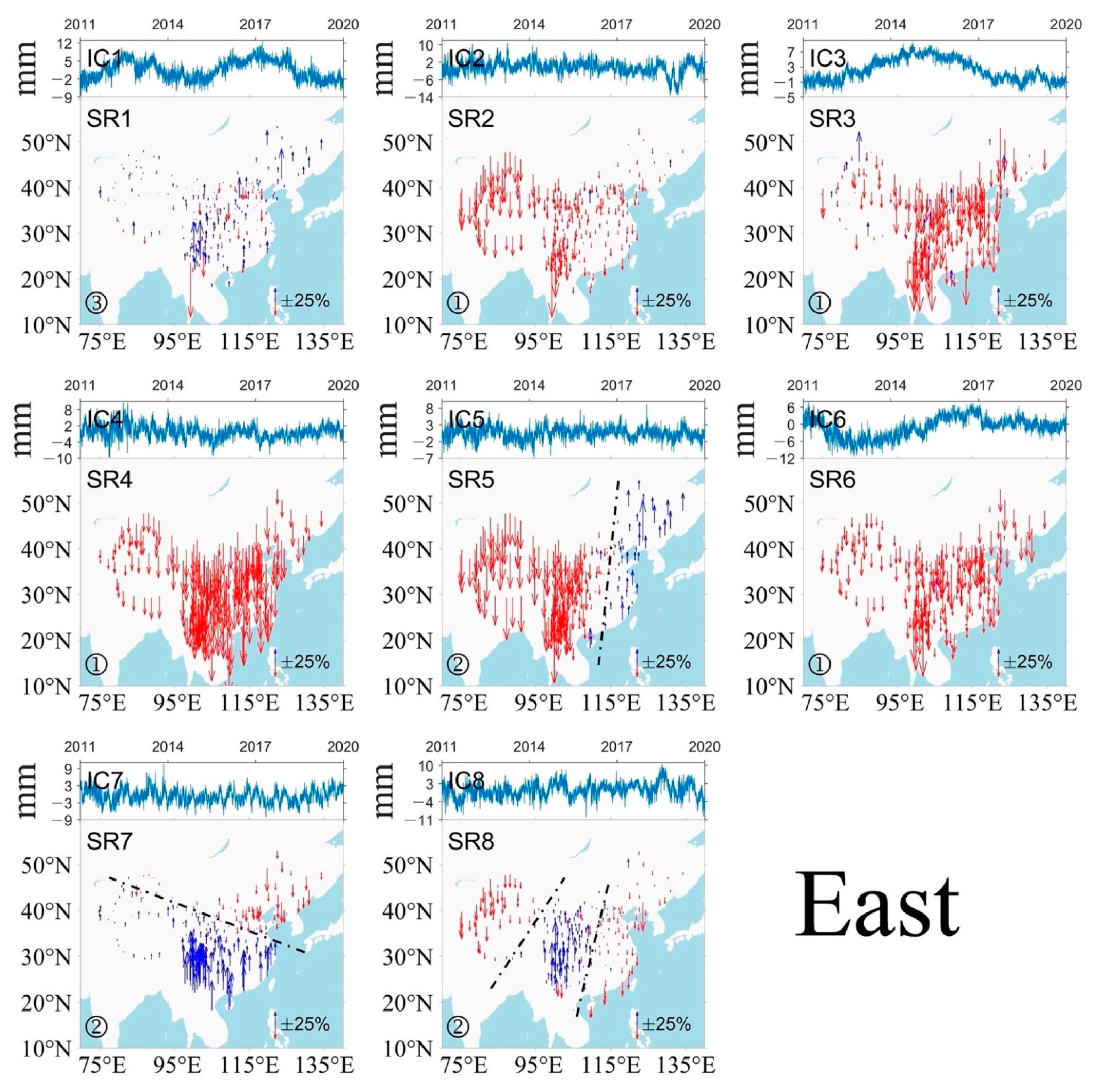
- CME is mainly composed of FN, and its spatial characteristics show that CMEs mainly have uniform influences or smoothly varying influences in Mainland China, while some local CMEs exist in several local regions.
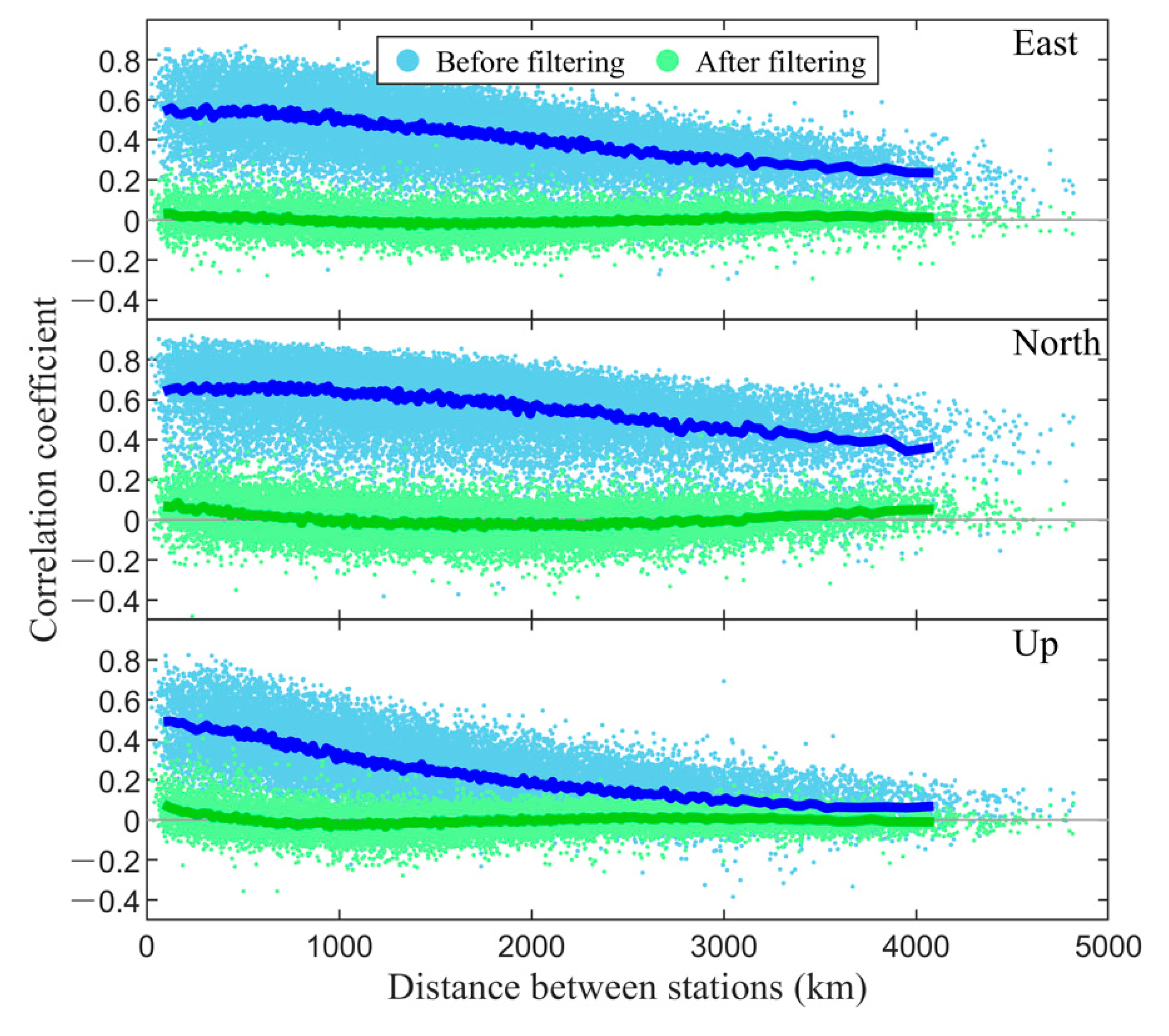
- After applying the CME filtering, the inter-station correlation coefficients decrease significantly, implying ICA filtering can effectively remove CME and greatly reduce the noise level. It is necessary to consider the coloured noise model and CME filtering in the estimation of velocity field by GPS coordinate time series.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, P.; Wang, Q.; Ma, Z. GPS velocity field and active crustal deformation in and around the Tibet Plateau. Earth Sci. Front. 2002, 2, 430–441. [Google Scholar]
- Wang, Q.; You, X.; Wang, W.; Yang, Z. GPS Measurement and Current Crustal Movement Across the Himalaya. Crustal Deform. Earthq. 1998, 18, 43–50. [Google Scholar]
- Zhu, Y.; Chen, Z.; Jiang, G. Preliminary result of crustal movement of China Mainland monitored by using GPS technology. Prog. Astron. 1997, 4, 373–376. [Google Scholar]
- Niu, Z.; Ma, Z.; Chen, X.; Zhang, Z.; Wang, Q.; You, X.; Sun, J. Chinese Crustal Movement Observation Network. J. Geod. Geodyn. 2002, 22, 1–7. [Google Scholar]
- Li, Q.; You, S.; Yang, S.; Du, R.; Qiao, X.; Zou, R.; Wang, Q. A precise velocity field of tectonic deformation in China as inferred from intensive GPS observation. Sci. China Earth Sci. 2012, 55, 695–698. [Google Scholar] [CrossRef]
- Zhang, J.; Bock, Y.; Johnson, H.; Fang, P.; Williams, S.; Genrich, J.; Wdowinski, S.; Behr, J. Southern California permanent GPS geodetic array: Error analysis of daily position estimates and site velocities. J. Geophys. Res. Solid Earth 1997, 102, 18035–18055. [Google Scholar] [CrossRef]
- Williams, S.D.P.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. Solid Earth 2004, 109, B03412. [Google Scholar] [CrossRef] [Green Version]
- Langbein, J. Noise in GPS displacement measurements from Southern California and Southern Nevada. J. Geophys. Res. Solid Earth 2008, 113, B05405. [Google Scholar] [CrossRef]
- Huang, L.; Fu, Y. Analysis on the noises from continuously monitoring GPS sites. Acta Seismol. Sin. 2007, 20, 206–211. [Google Scholar] [CrossRef]
- Tian, Y.; Shen, Z.; Li, P. Analysis on correlated noise in continuous GPS observations. Acta Seismol. Sin. 2010, 32, 696–704. [Google Scholar]
- Wang, W.; Zhao, B.; Qi, W.; Yang, S. Noise analysis of continuous GPS coordinate time series for CMONOC. Adv. Space Res. 2012, 49, 943–956. [Google Scholar] [CrossRef]
- Wdowinski, S.; Bock, Y.; Zhang, J.; Fang, P.; Genrich, J. Southern California permanent GPS geodetic array: Spatial filtering of daily positions for estimating coseismic and postseismic displacements induced by the 1992 Landers earthquake. J. Geophys. Res. Solid Earth 1997, 102, 18057–18070. [Google Scholar] [CrossRef]
- Nikolaidis, R. Observation of Geodetic and Seismic Deformation with the Global Positioning System. Ph.D. Thesis, University of California, San Diego, CA, USA, 2002. [Google Scholar]
- Dong, D.; Fang, P.; Bock, Y.; Webb, F.; Prawirodirdjo, L.; Kedar, S.; Jamason, P. Spatiotemporal filtering using principal component analysis and Karhunen-Loeve expansion approaches for regional GPS network analysis. J. Geophys. Res. Solid Earth 2006, 111, 3405–3421. [Google Scholar] [CrossRef] [Green Version]
- Yuan, L.G.; Ding, X.L.; Chen, W.; Kwok, S.; Chan, S.B.; Hung, P.S.; Chau, K.T. Characteristics of Daily Position Time Series from the Hong Kong GPS Fiducial Network. Chin. J. Geophys. 2013, 51, 976–990. [Google Scholar] [CrossRef]
- Shen, Y.; Li, W.; Xu, G.; Li, B. Spatiotemporal filtering of regional GNSS network’s position time series with missing data using principle component analysis. J. Geod. 2014, 88, 1–12. [Google Scholar] [CrossRef]
- He, X.; Hua, X.; Yu, K.; Wei, X.; Lu, T.; Zhang, W.; Chen, X. Accuracy enhancement of GPS time series using principal component analysis and block spatial filtering. Adv. Space Res. 2015, 55, 1316–1327. [Google Scholar] [CrossRef]
- Li, W.; Shen, Y.; Li, B. Weighted spatiotemporal filtering using principal component analysis for analyzing regional GNSS position time series. Acta Geodaetica et Geophysica 2015, 50, 419–436. [Google Scholar] [CrossRef] [Green Version]
- Yuan, P.; Jiang, W.; Wang, K.; Sneeuw, N. Effects of Spatiotemporal Filtering on the Periodic Signals and Noise in the GPS Position Time Series of the Crustal Movement Observation Network of China. Remote Sens. 2018, 10, 1472. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Dai, W.; Peng, W.; Meng, X. Spatiotemporal analysis of GPS time series in vertical direction using independent component analysis. Earth Planets Space 2015, 67, 189. [Google Scholar] [CrossRef] [Green Version]
- Ming, F.; Yang, Y.; Zeng, A. Analysis and comparison of common mode error extraction using principal component analysis and independent component analysis. J. Geod. Geodyn. 2017, 37, 385–389. [Google Scholar]
- Ming, F.; Yang, Y.; Zeng, A.; Zhao, B. Spatiotemporal filtering for regional GPS network in China using independent component analysis. J. Geod. 2017, 91, 419–440. [Google Scholar] [CrossRef]
- Wu, W.; Meng, G.; Wu, J.; Zhao, G. Optimizing realization of the terrestrial reference frame on a regional basis: A case study using the crustal movement observation network of China. Adv. Space Res. 2021, 68, 2367–2382. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Y.; Wu, W. Analysis of current crustal movement velocity field of south-eastern Tibetan Plateau. J. Geod. Geodyn. 2018, 38, 116–124. [Google Scholar]
- Liang, S.; Gan, W.; Shen, C.; Xiao, G.; Liu, J.; Chen, W.; Ding, X.; Zhou, D. Three-dimensional velocity field of present-day crustal motion of the Tibetan Plateau derived from GPS measurements. J. Geophys. Res. Solid Earth 2013, 118, 5722–5732. [Google Scholar] [CrossRef]
- Dang, Y.; Yang, Q.; Xue, S.; Yue, C.; Liu, Z. GNSS monitoring dynamic variation characteristics of crustal deformation in the Sichuan-Yunnan REGION. J. Geod. Geodyn. 2019, 39, 111–116. [Google Scholar]
- Wei, Z.; Zhao, L. Lg-Q model and its implication on high-frequency ground motion for earthquakes in the Sichuan and Yunnan region. Earth Planet. Phys. 2019, 3, 526–536. [Google Scholar] [CrossRef]
- Liu, R.; Zou, R.; Li, J.; Zhang, C.; Zhao, B.; Zhang, Y. Vertical displacements driven by groundwater storage changes in the north China plain detected by GPS observations. Remote Sens. 2018, 10, 259. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.; Tan, K.; Zhang, C.; Zhao, B.; Wang, D.; Li, Q. Present-day crustal movement of the Chinese mainland based on Global Navigation Satellite System data from 1998 to 2018. Adv. Space Res. 2019, 63, 840–856. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, B.; Shao, Y.; Li, E. Calculation of Crustal Horizontal Strain in Central North China Based on Refined Multiquadric Function and the Spherical Integral Strain Method. Earthq. Res. China 2019, 35, 76–83. [Google Scholar]
- Ma, J.; Li, Z.; Jiang, W.; Cao, C.; Huo, L.; Zhou, X. A new three-dimensional noise modeling method based on singular value decomposition and its application to CMONOC GPS network. Earth Space Sci. 2021, 8, e2020EA001250. [Google Scholar] [CrossRef]
- Li, C.; Huang, S.; Chen, Q.; Dam, T.; Fok, H.; Zhao, Q.; Wu, W.; Wang, X. Quantitative evaluation of environmental loading induced displacement products for correcting GNSS time series in CMONOC. Remote Sens. 2020, 12, 594. [Google Scholar] [CrossRef] [Green Version]
- Yao, C.; Liu, L.; Lin, X.; Wang, C.; Zhang, R.; Wang, J.; Chen, R. Analyzing typhoon-triggered vertical land motion from GPS and environmental load-induced deformation data. Chin. J. Geophys.-Chin. Ed. 2020, 63, 2870–2881. [Google Scholar]
- Zhang, P.; Deng, Q.; Zhang, G.; Ma, J.; Gan, W.; Min, W.; Mao, F.; Wang, Q. Active tectonic blocks and strong earthquakes in the continent of China. Sci. China Ser. D Earth Sci. 2003, 46, 13–24. [Google Scholar]
- Herring, T.A.; King, R.W.; McClusky, S.C. Documentation of the GAMIT and GLOBK Software Release 10.4; Massachusetts Institute of Technology: Cambridge, MA, USA, 2010. [Google Scholar]
- Zhao, B.; Huang, Y.; Zhang, C.; Wang, W.; Tan, K.; Du, R. Crustal deformation on the Chinese mainland during 1998–2014 based on GPS data. Geod. Geodyn. 2015, 6, 7–15. [Google Scholar] [CrossRef] [Green Version]
- Bos, M.S.; Fernandes, R.M.S.; Williams, S.D.P.; Bastos, L. Fast Error Analysis of Continuous GNSS Observations with Missing Data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Koscielny-Bunde, E.; Bunde, A.; Havlin, S.; Roman, H.E.; Goldreich, Y.; Schellnhuber, H.-J. Indication of a universal persistence law governing atmospheric variability. Phys. Rev. Lett. 1998, 81, 729–732. [Google Scholar] [CrossRef]
- Schneider, T. Analysis of Incomplete Climate Data: Estimation of Mean Values and Covariance Matrices and Imputation of Missing Values. J. Clim. 2001, 14, 853–871. [Google Scholar] [CrossRef]
- Hyvarinen, A. Fast and robust fixed-point algorithms for independent component analysis. IEEE Trans. Neural Netw. 1999, 10, 626–634. [Google Scholar] [CrossRef] [Green Version]
- Khandelwal, D.D.; Gahalaut, V.; Kumar, N.; Kundu, B.; Yadav, R.K. Seasonal variation in the deformation rate in NW Himalayan region. Nat. Hazards 2014, 74, 1853–1861. [Google Scholar] [CrossRef]
- Wang, W.; Qiao, X.; Wang, D.; Chen, Z.; Yu, P.; Lin, M.; Chen, W. Spatiotemporal noise in GPS position time-series from Crustal Movement Observation Network of China. Geophys. J. Int. 2019, 216, 1560–1577. [Google Scholar] [CrossRef]
- Pan, Y.; Shen, W.; Shum, C.K.; Chen, R. Spatially varying surface seasonal oscillations and 3-D crustal deformation of the Tibetan Plateau derived from GPS and GRACE data. Earth Planet. Sci. Lett. 2018, 502, 12–22. [Google Scholar] [CrossRef]
- Pan, Y.; Chen, R.; Yi, S.; Wang, W.; Ding, H.; Shen, W.; Chen, L. Contemporary mountain-building of the Tianshan and its relevance to geodynamics constrained by integrating GPS and GRACE measurements. J. Geophys. Res. Solid Earth 2019, 124, 12171–12188. [Google Scholar] [CrossRef]
- Amiri-Simkooei, A.R. On the nature of GPS draconitic year periodic pattern in multivariate position time series. J. Geophys. Res. Solid Earth 2013, 118, 2500–2511. [Google Scholar] [CrossRef] [Green Version]
- Ray, J.; Altamimi, Z.; Collilieux, X.; Dam, T.V. Anomalous harmonics in the spectra of GPS position estimates. GPS Solut. 2008, 12, 55–64. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | RMSE/mm | |
|---|---|---|
| Before Filtering | After Filtering | |
| East | 3.25 | 1.92 |
| North | 2.77 | 1.14 |
| Up | 6.68 | 3.89 |
| Component | IC1 | IC2 | IC3 | CI4 | IC5 | IC6 | IC7 | IC8 | IC9 | IC10 |
|---|---|---|---|---|---|---|---|---|---|---|
| East | −0.58 | −0.71 | −0.63 | −0.66 | −0.71 | −0.64 | −0.69 | −0.65 | ||
| North | −0.66 | −0.59 | −0.9 | −0.82 | −0.79 | −0.74 | −0.77 | −0.87 | ||
| Up | −0.54 | −0.51 | −0.72 | −0.51 | −0.9 | −0.82 | −0.99 | −0.81 | −1.07 | −1.05 |
| Versions | East/dB | North/dB | Up/dB | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Average | max | min | Average | max | min | Average | max | min | |
| WN | 30.67 | 33.79 | 23.05 | 27.13 | 31.82 | 9.23 | 13.37 | 26.02 | −13.01 |
| Unfiltered | 20.17 | 22.71 | 9.81 | 16.19 | 21.70 | −3.01 | 3.87 | 15.52 | −20.00 |
| Filtered | 25.32 | 31.27 | 10.87 | 21.58 | 28.92 | −1.80 | 8.46 | 19.88 | −16.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, W.; Ding, K.; Liu, P.; Lan, G.; Ming, Z. Spatiotemporal Filtering for Continuous GPS Coordinate Time Series in Mainland China by Using Independent Component Analysis. Remote Sens. 2022, 14, 2904. https://doi.org/10.3390/rs14122904
Zhou W, Ding K, Liu P, Lan G, Ming Z. Spatiotemporal Filtering for Continuous GPS Coordinate Time Series in Mainland China by Using Independent Component Analysis. Remote Sensing. 2022; 14(12):2904. https://doi.org/10.3390/rs14122904
Chicago/Turabian StyleZhou, Wei, Kaihua Ding, Peng Liu, Guanghong Lan, and Zutao Ming. 2022. "Spatiotemporal Filtering for Continuous GPS Coordinate Time Series in Mainland China by Using Independent Component Analysis" Remote Sensing 14, no. 12: 2904. https://doi.org/10.3390/rs14122904
APA StyleZhou, W., Ding, K., Liu, P., Lan, G., & Ming, Z. (2022). Spatiotemporal Filtering for Continuous GPS Coordinate Time Series in Mainland China by Using Independent Component Analysis. Remote Sensing, 14(12), 2904. https://doi.org/10.3390/rs14122904