
VENμS: Mission Characteristics, Final Evaluation of the First Phase and Data Production

 ,
,
Abstract
:1. Introduction
2. Calibration and Performances of the Instrument
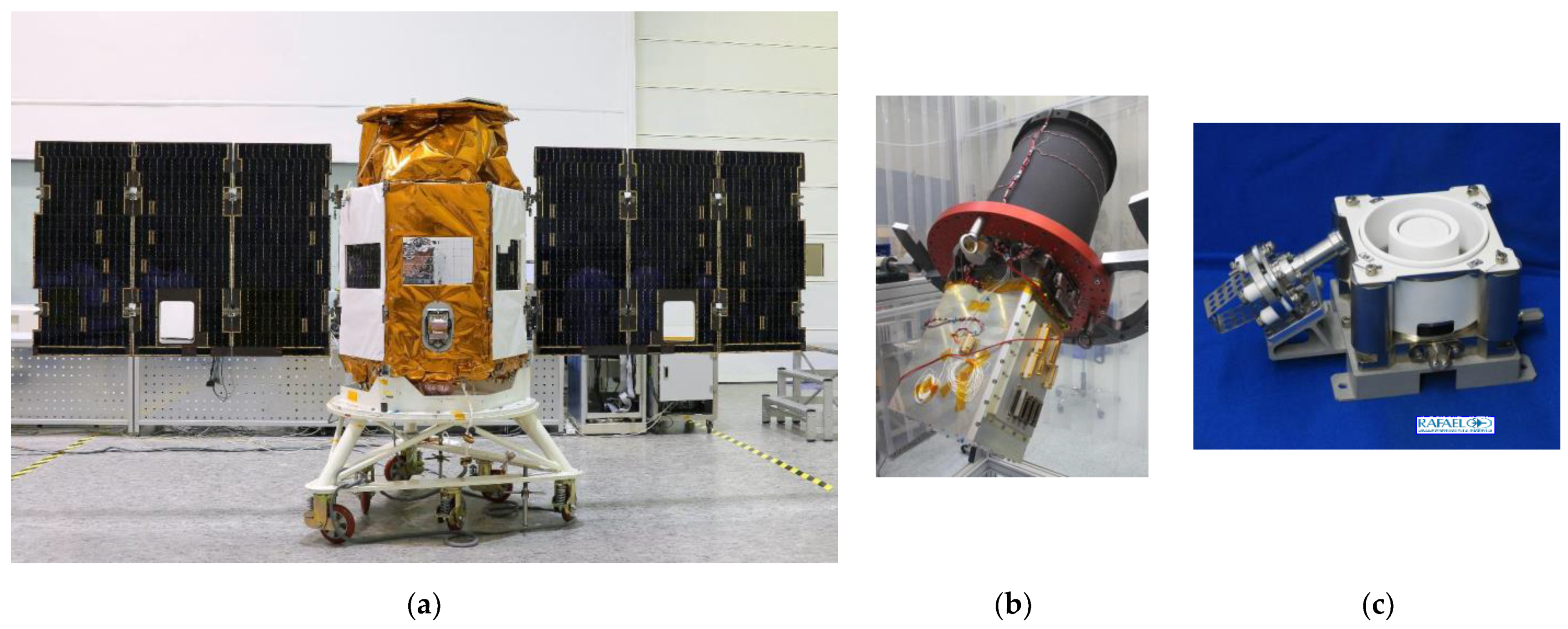
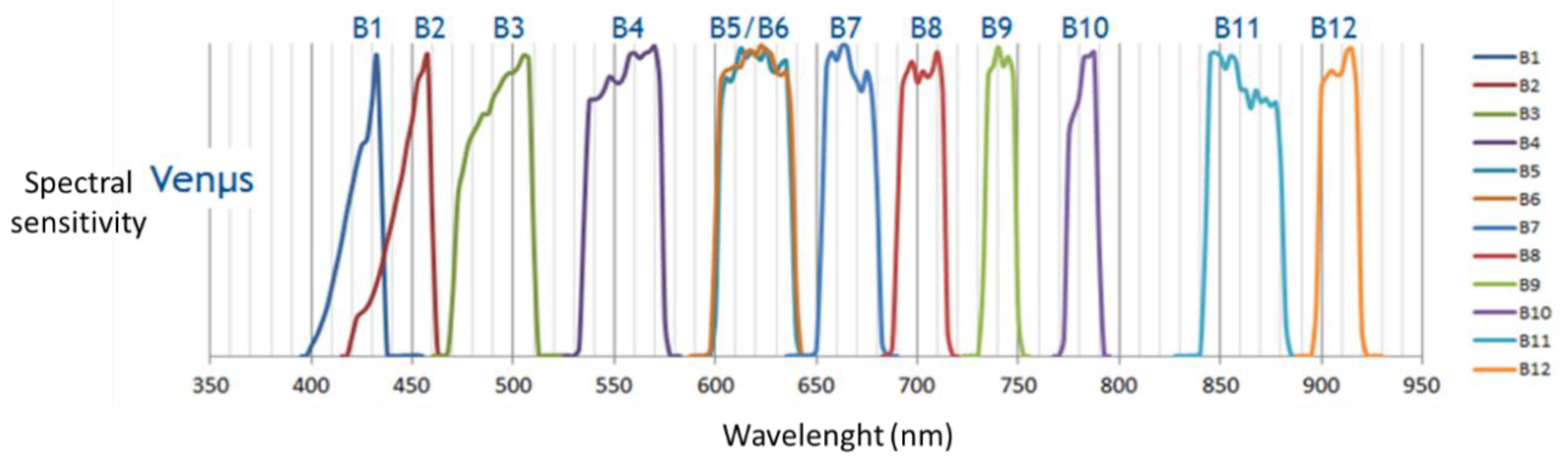
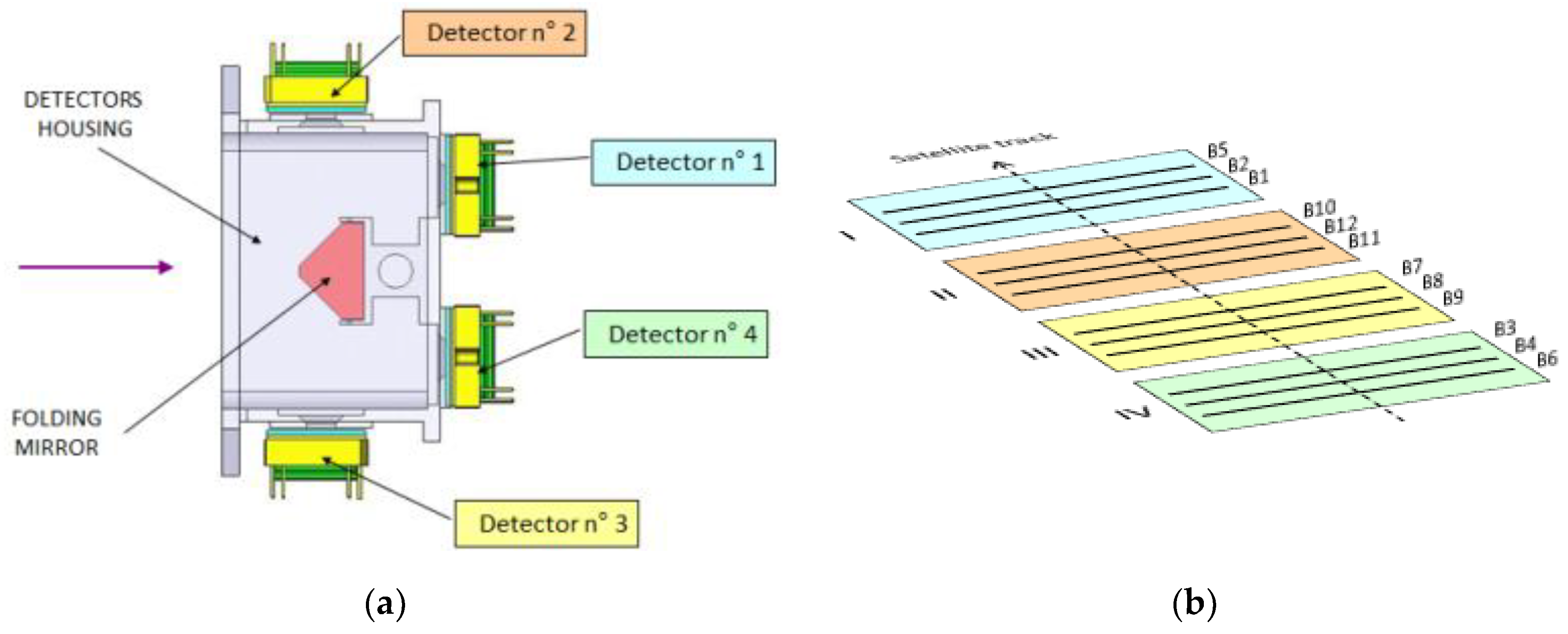
2.1. Key Features
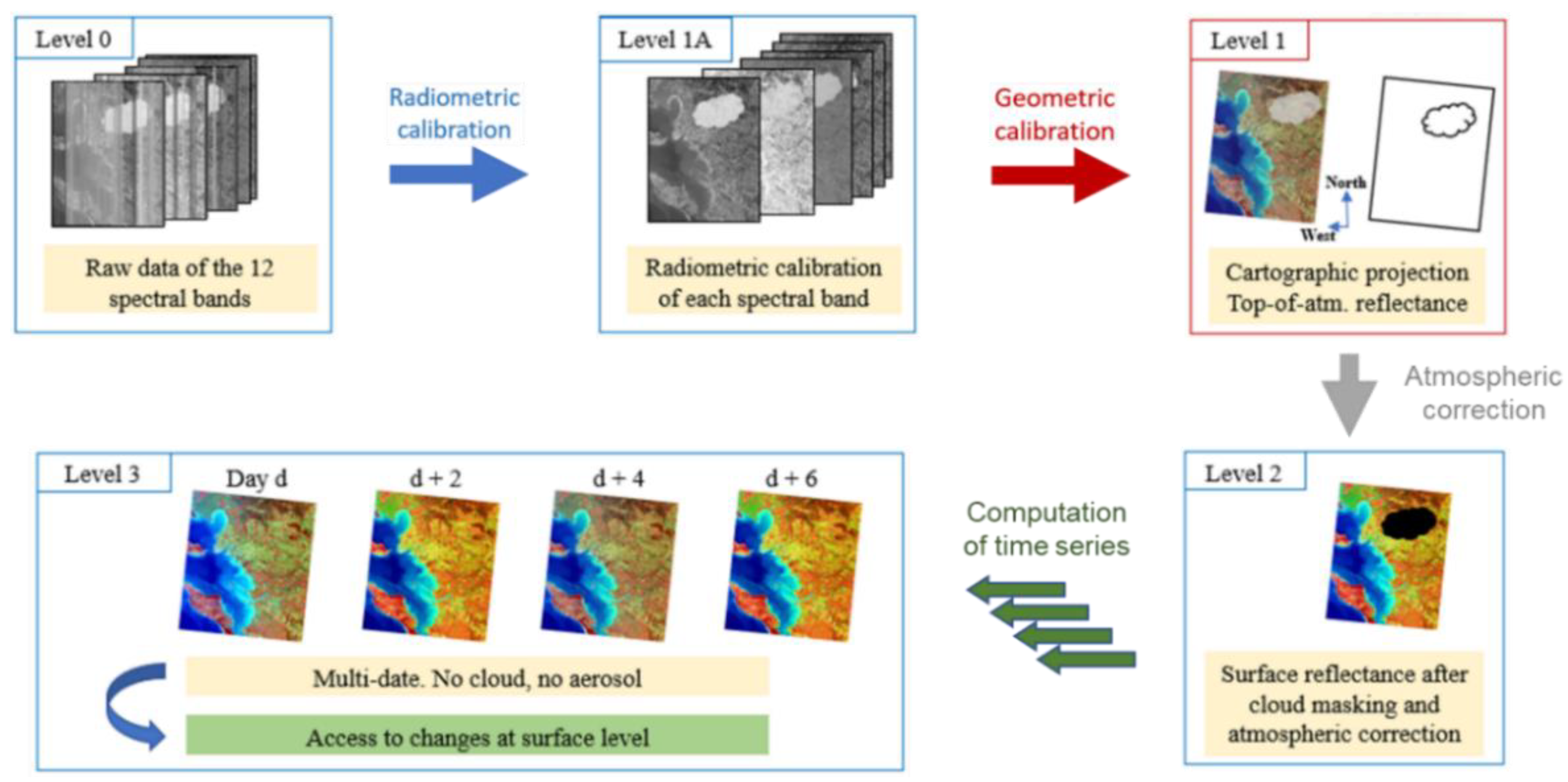
2.2. VENμS Products Levels and Production Processings
2.3. Calibration and Performances of Level-1 VENμS Products
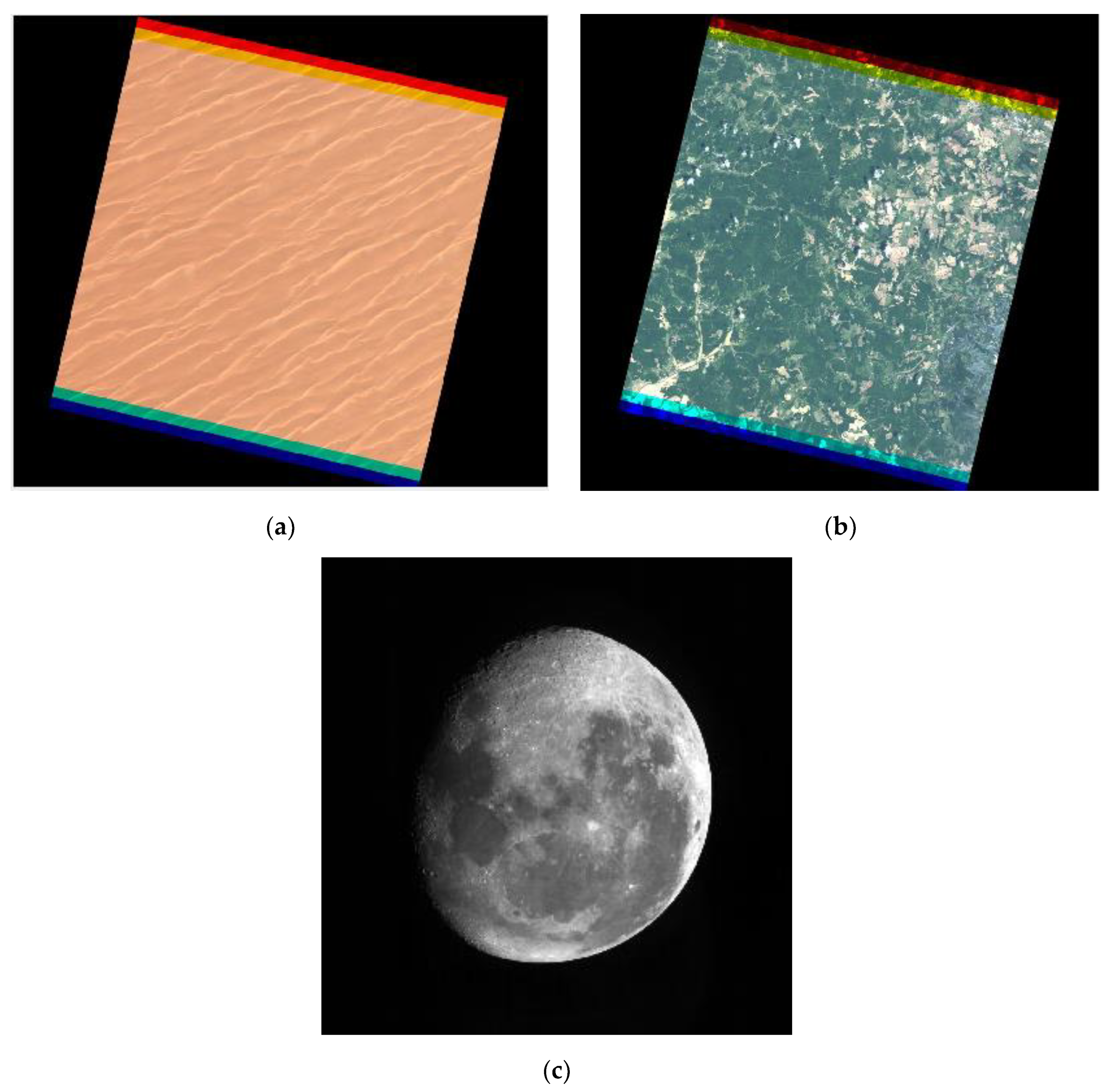
2.3.1. Radiometry
Radiometric Model
- G is the video gain associated to the register r;
- g is the equalization coefficient for the radiance Lk;
- A is the absolute radiometric calibration coefficient;
- D is the dark current.
Calibration: Methods and Results
- Dark Signal
- Equalization
- Absolute Calibration
Performances: Methods and Results
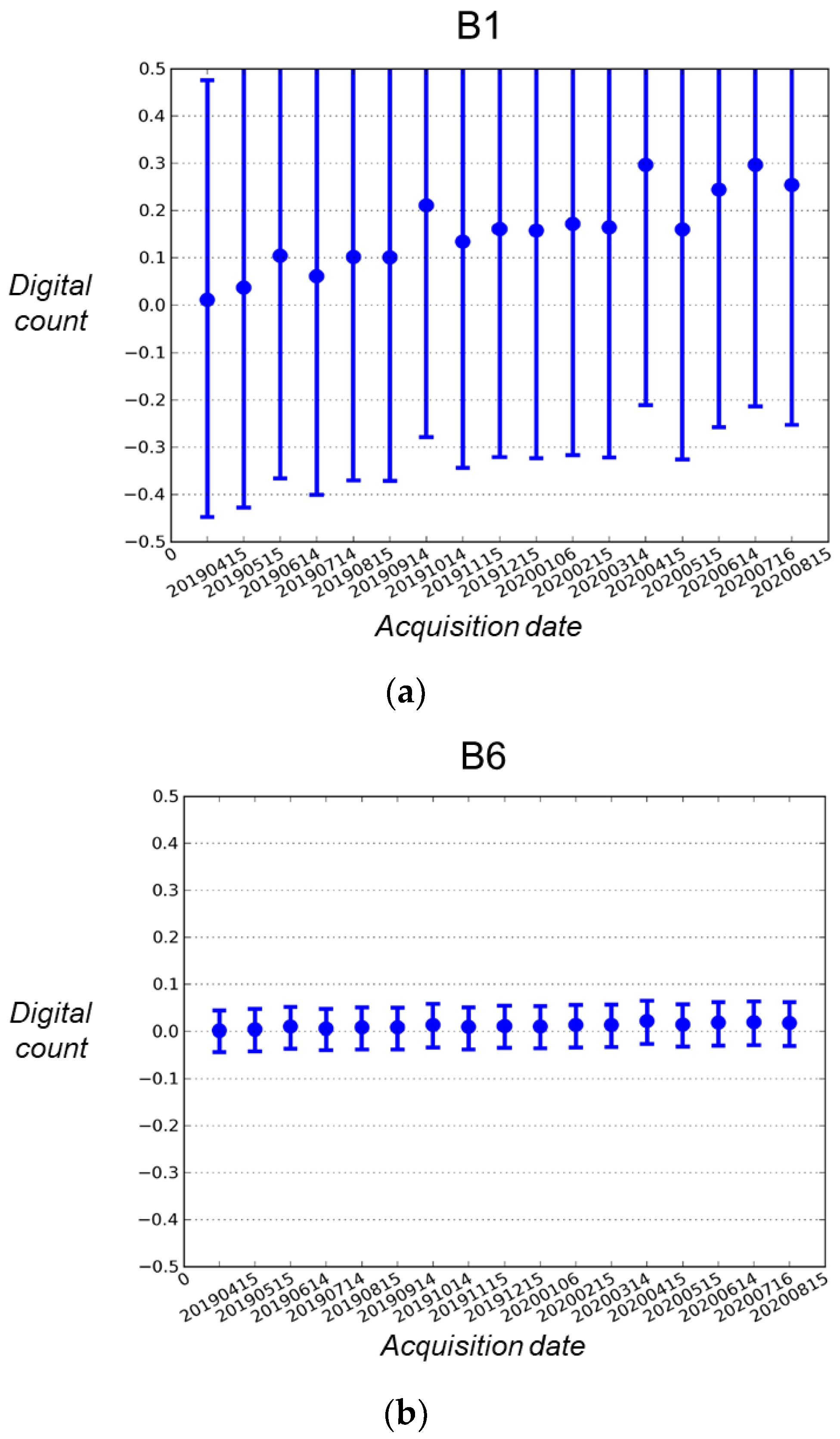
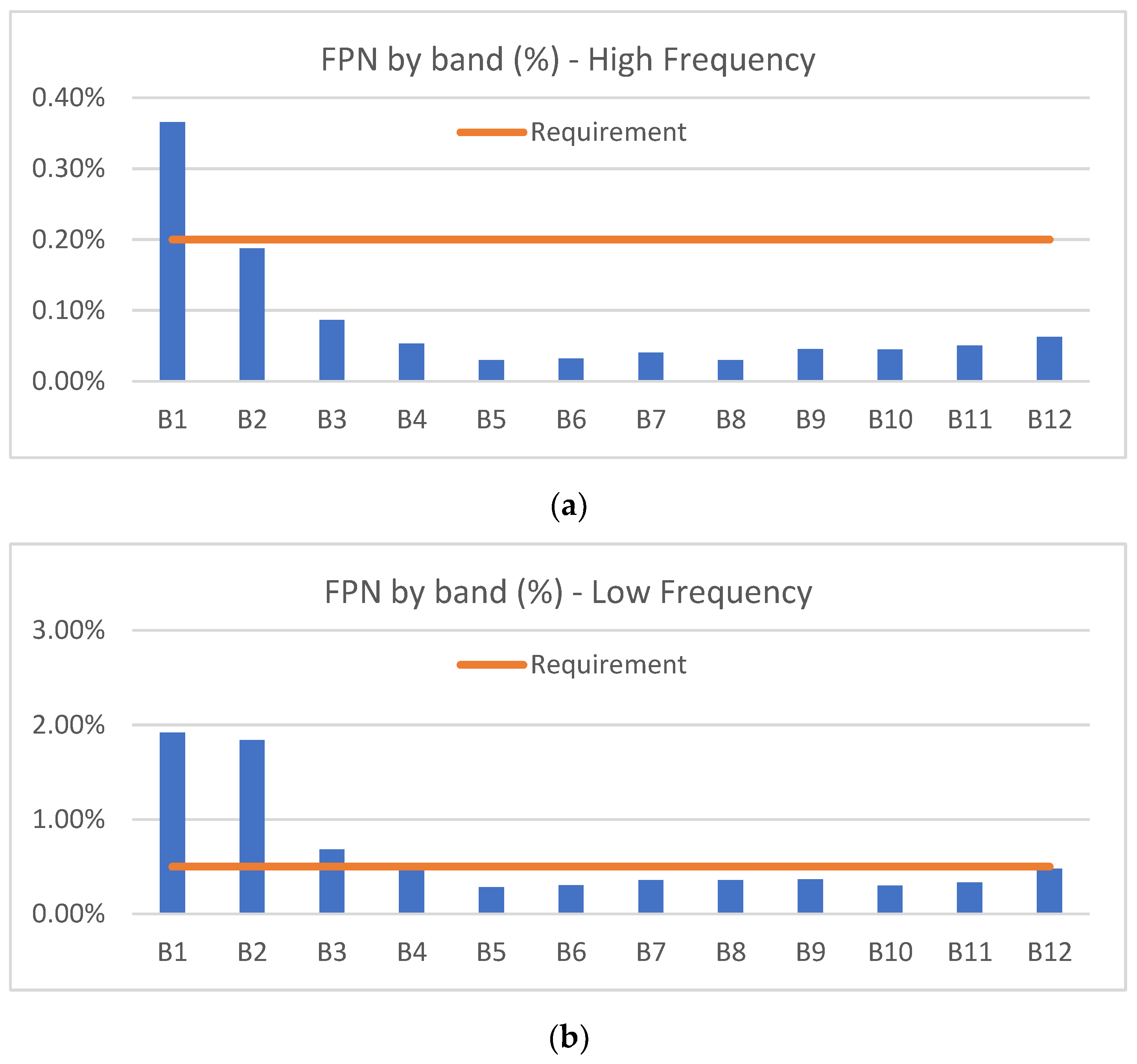
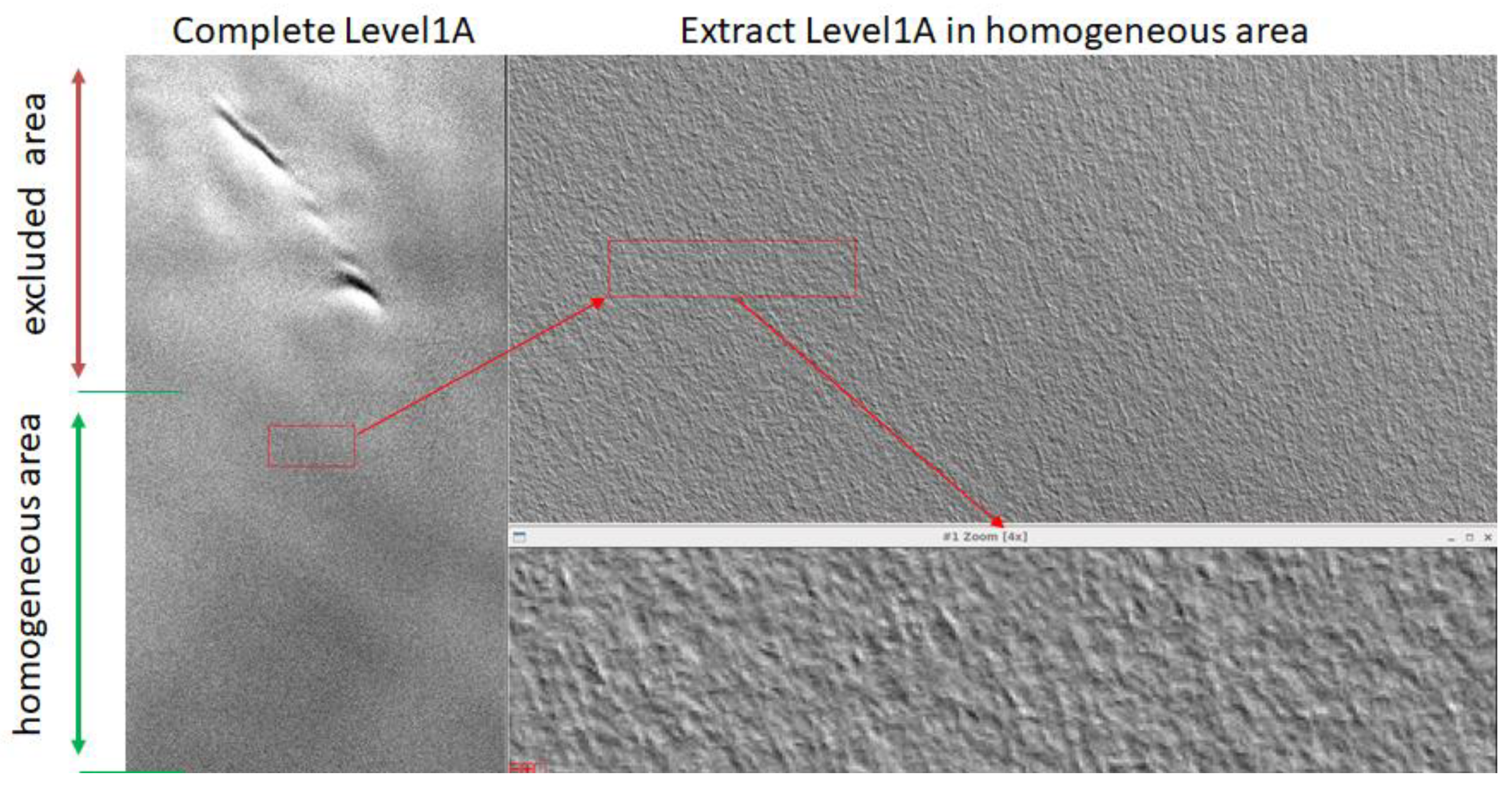
- Fixed Pattern Noise (FPN)
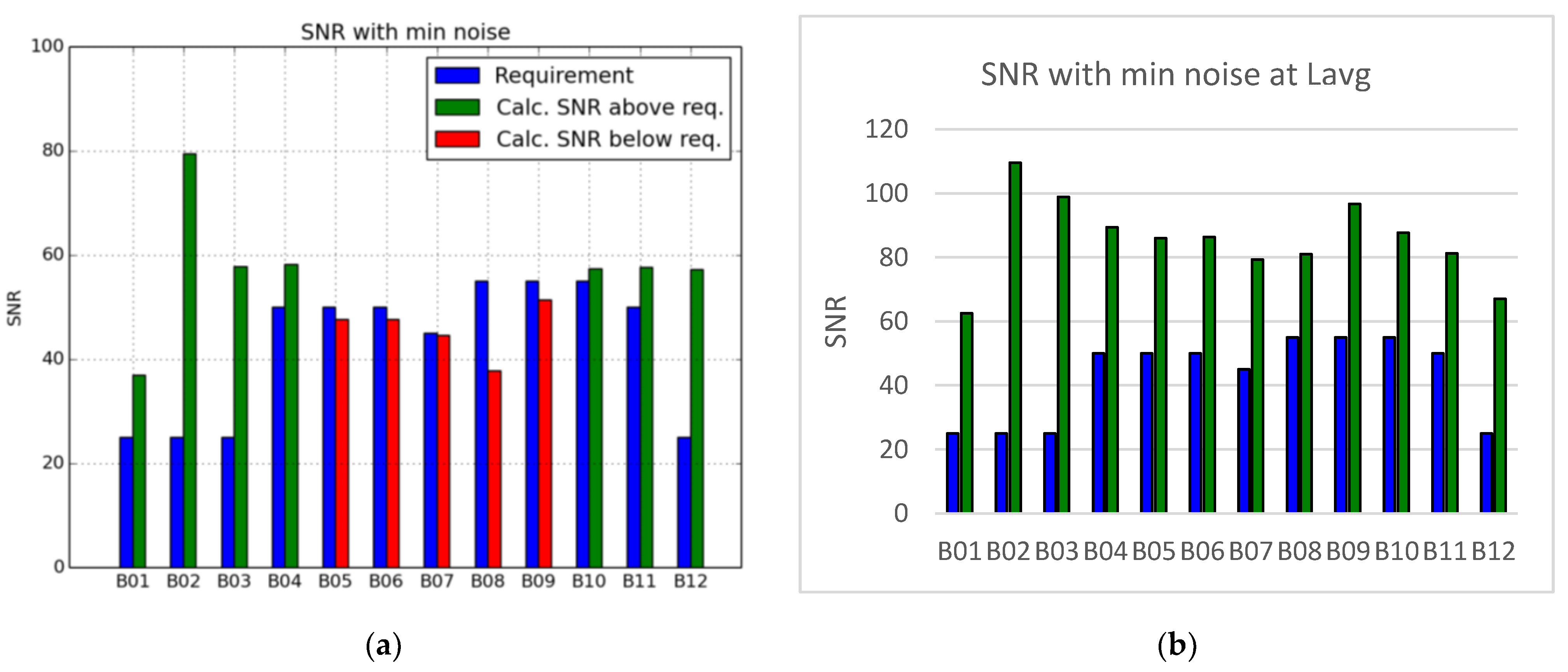
- Signal to Noise Ratio (SNR)
- , are the coefficients of the model;
- is the observed radiance.
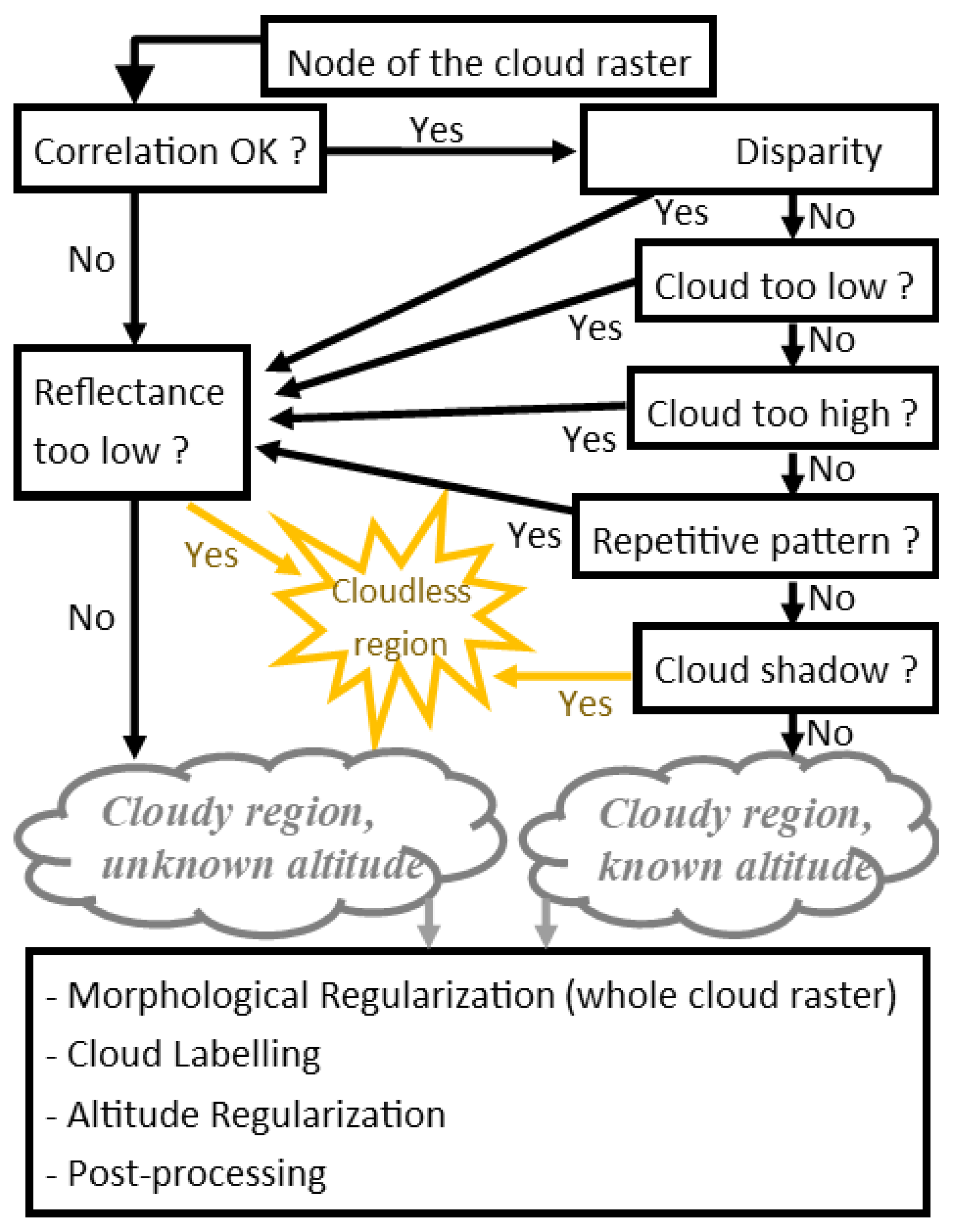
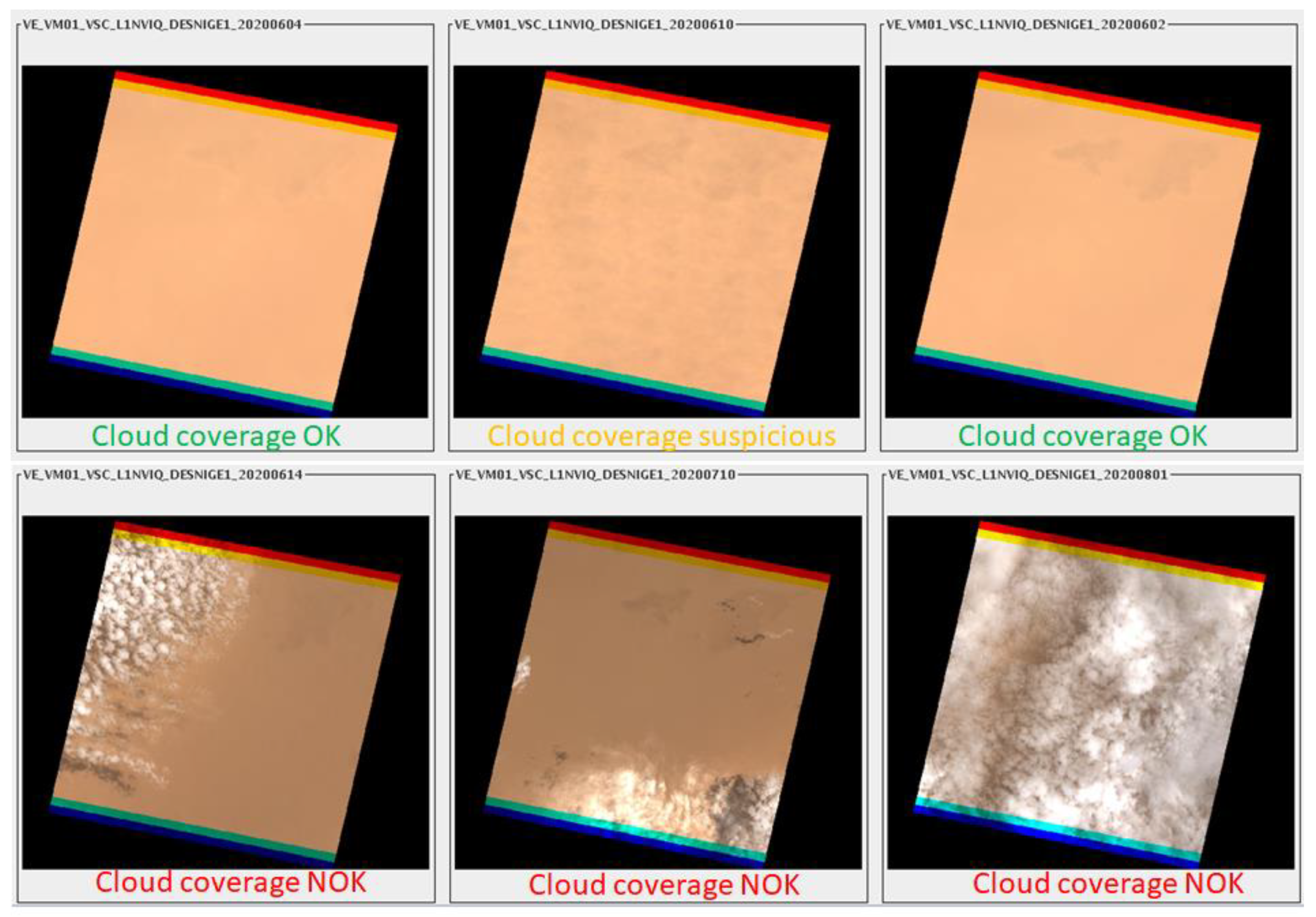
Cloud Mask Generation
2.3.2. Geometry
Calibration: Methods and Results
- Focal Plane Calibration
- TDI Mis-synchronization Calibration
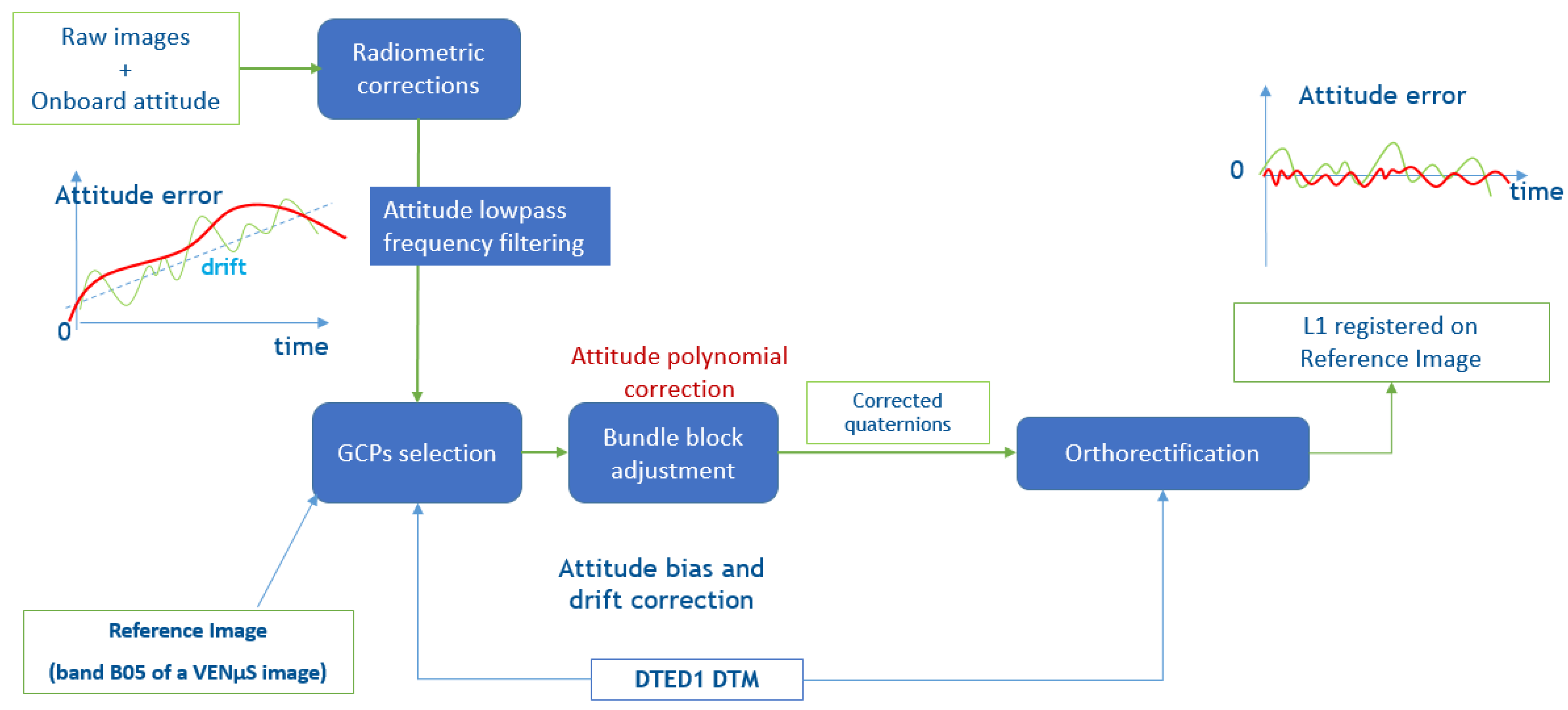
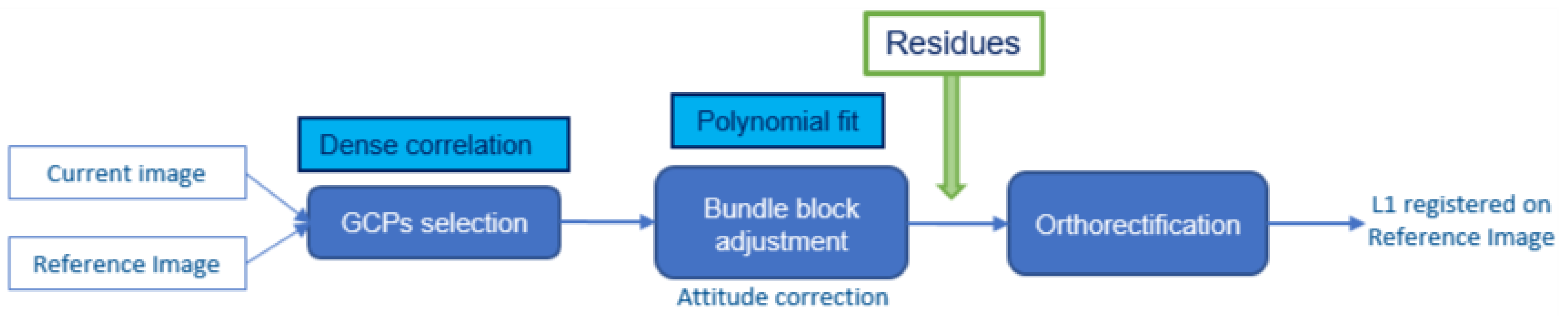
- Automatic Image Registration
- a monospectral (B5 spectral band) VENμS Level-1A product;
- localization accuracy refined using a Sentinel-2 image specific to each site;
- processed from a cloudless acquisition.
Performances: Methods and Results
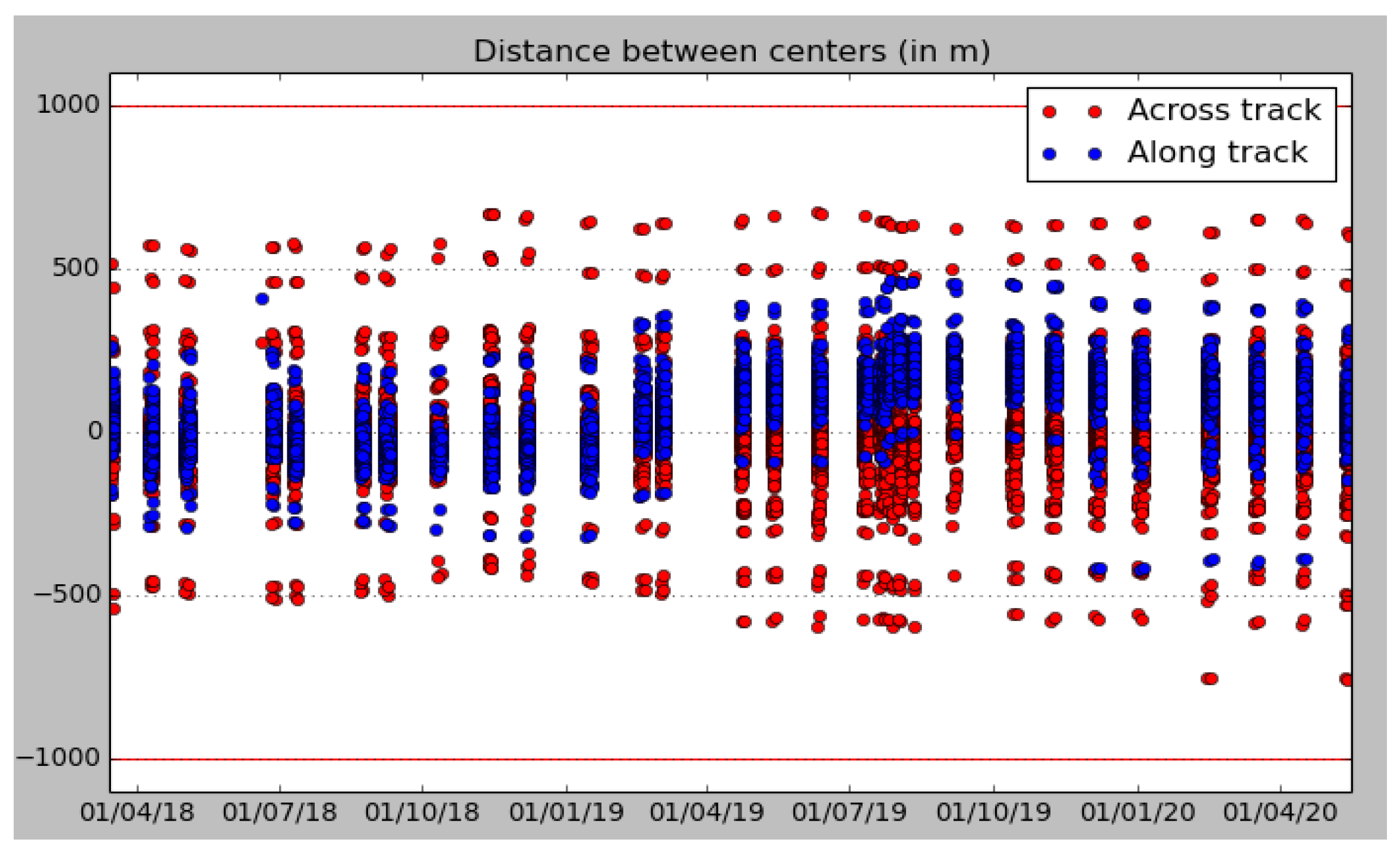
- Pointing Performances
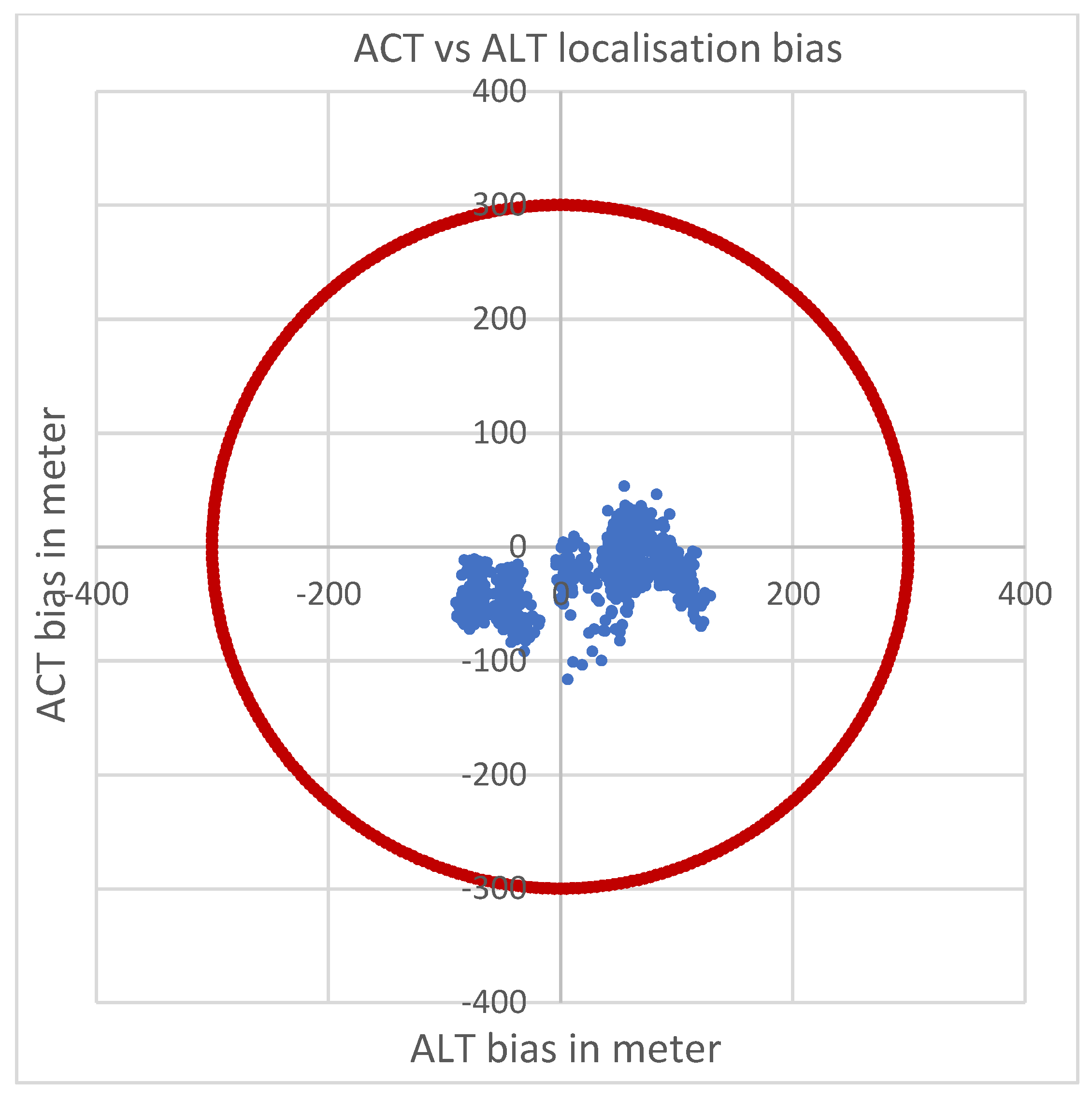
- Localization Performances
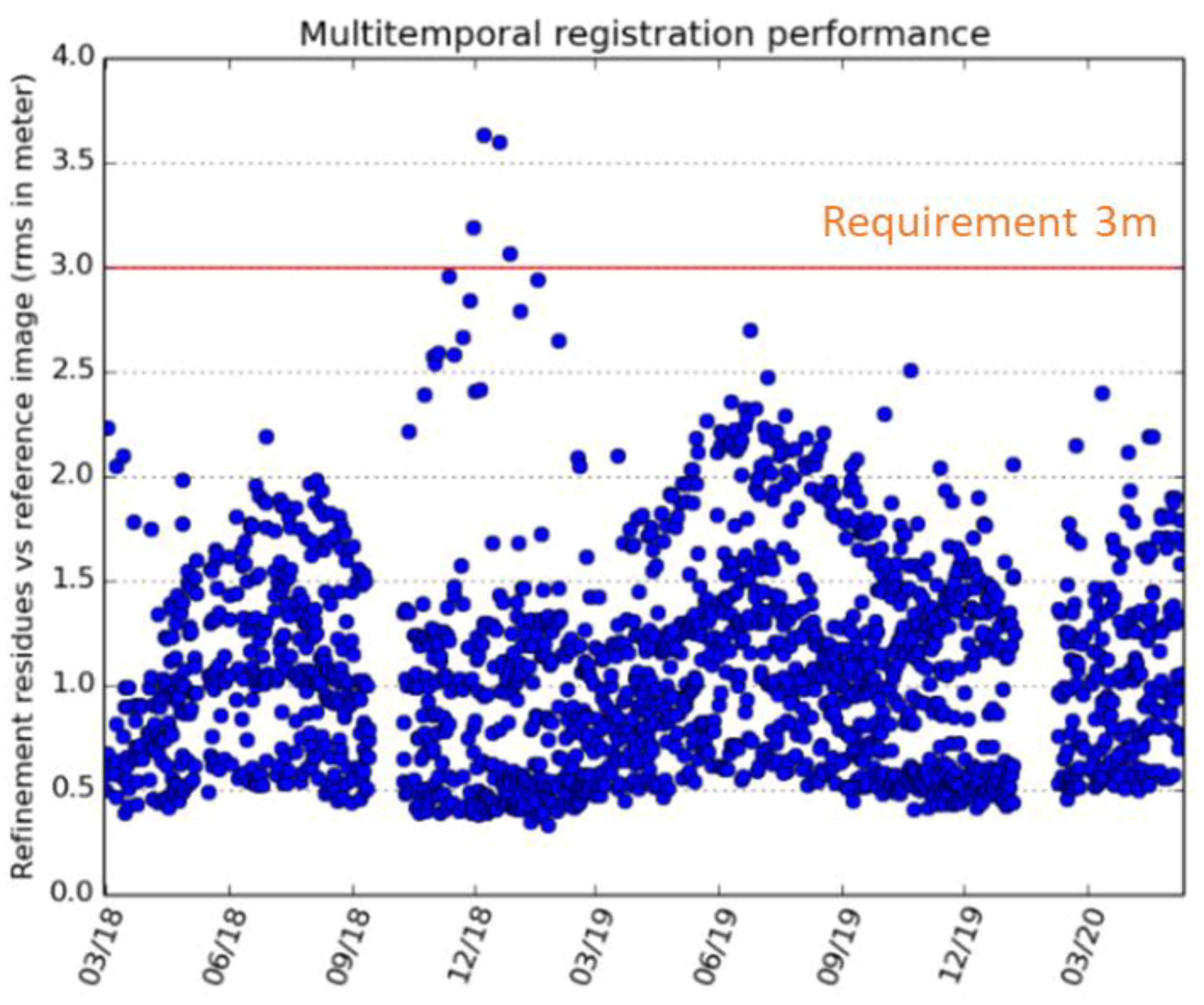
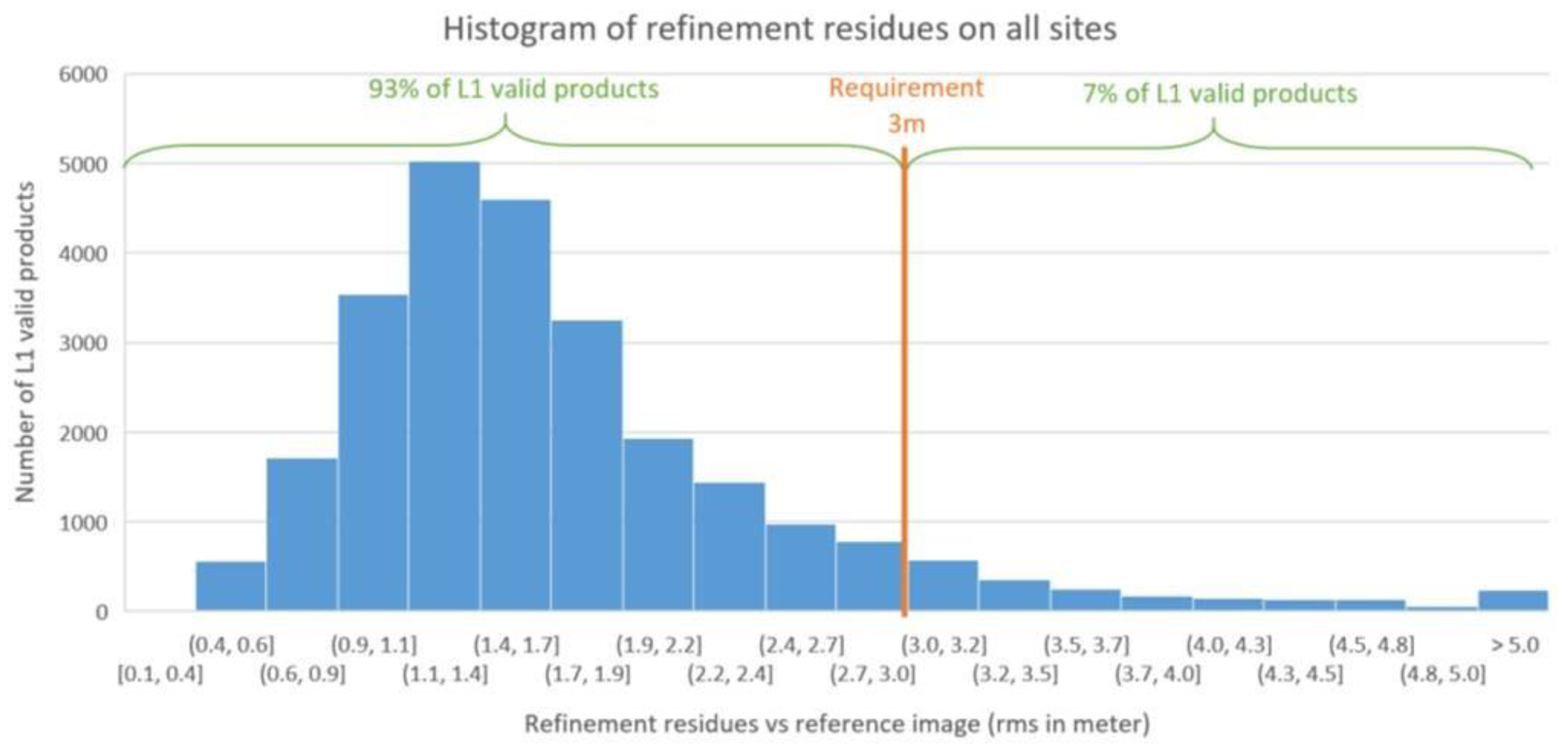
- Multi-Temporal Registration Performance
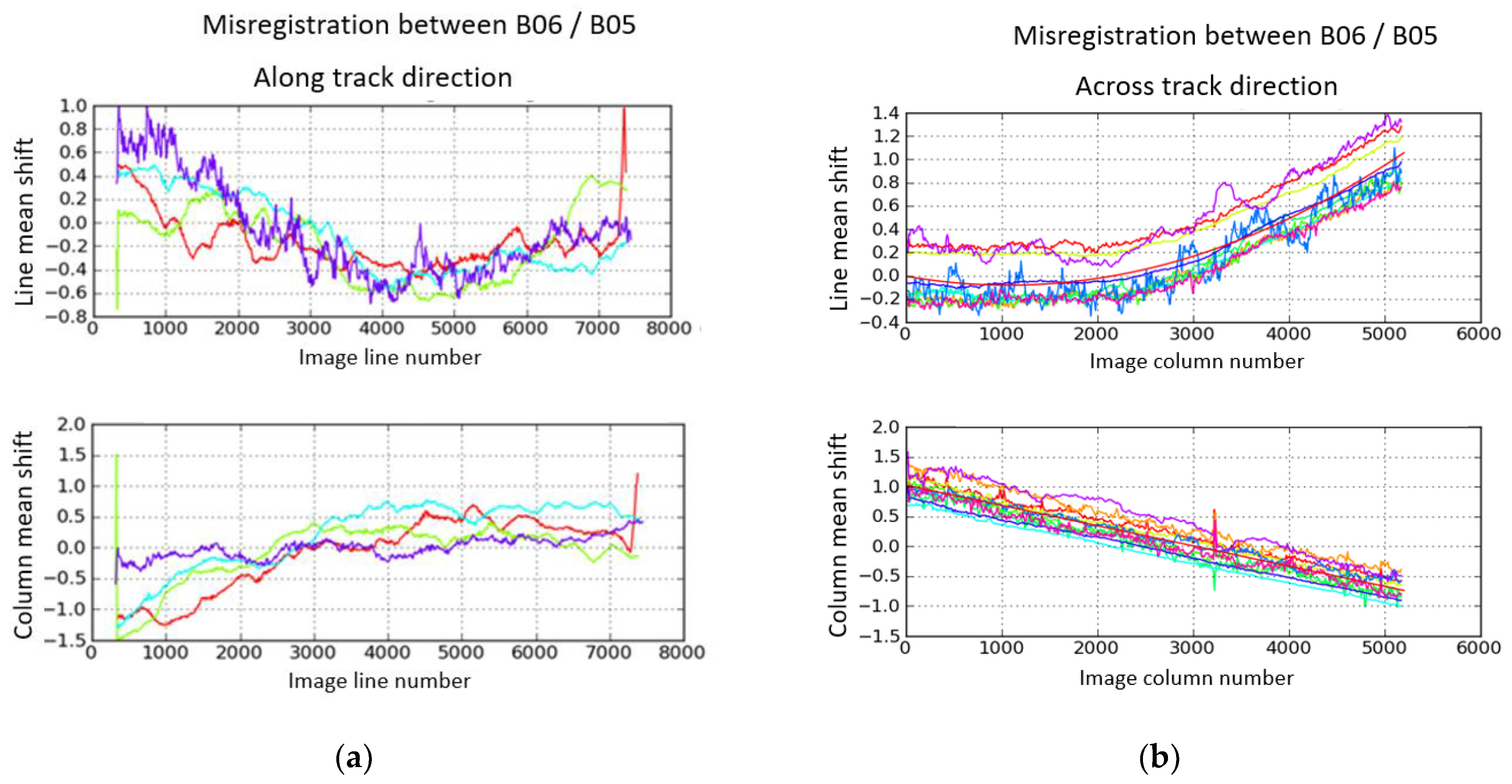
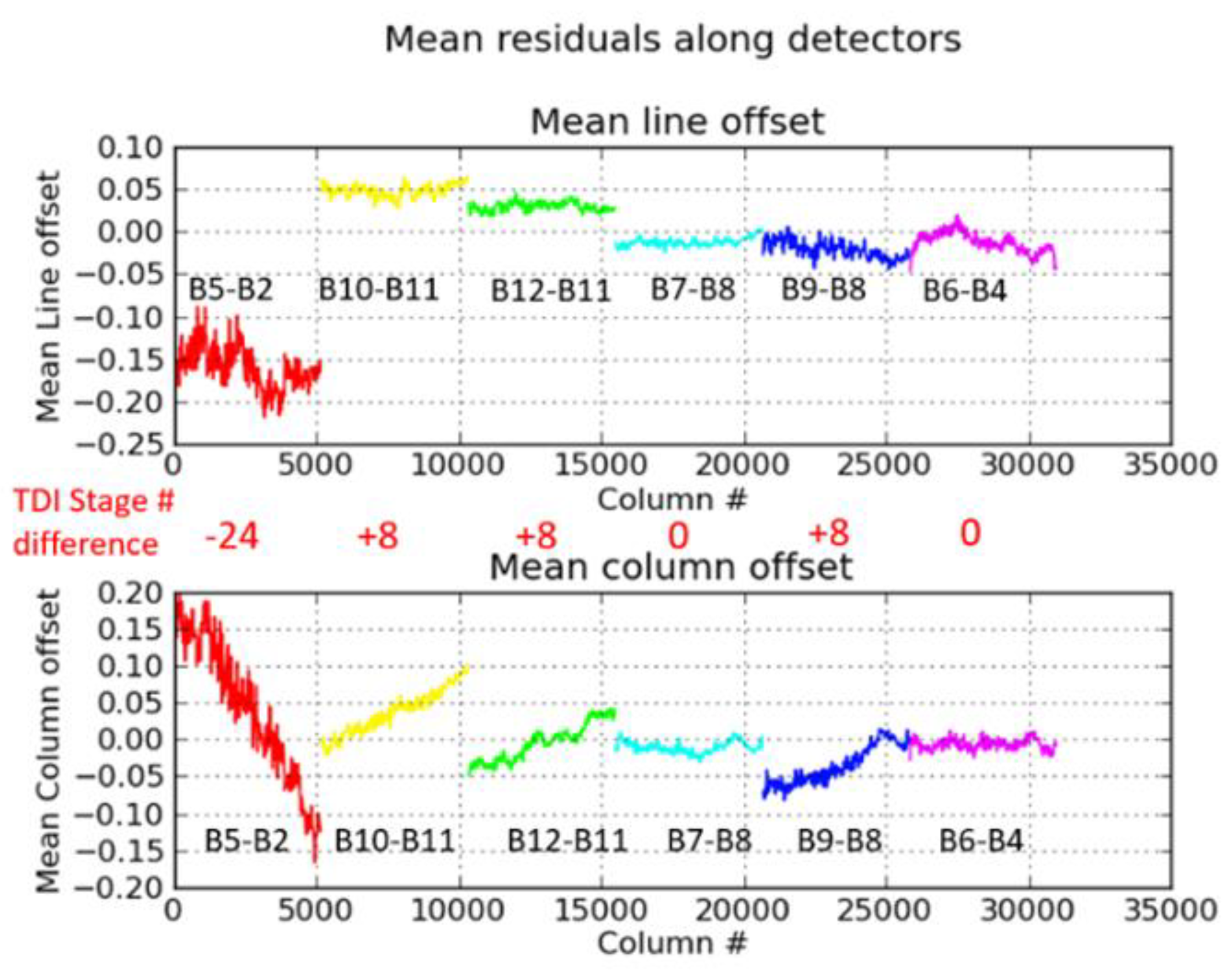
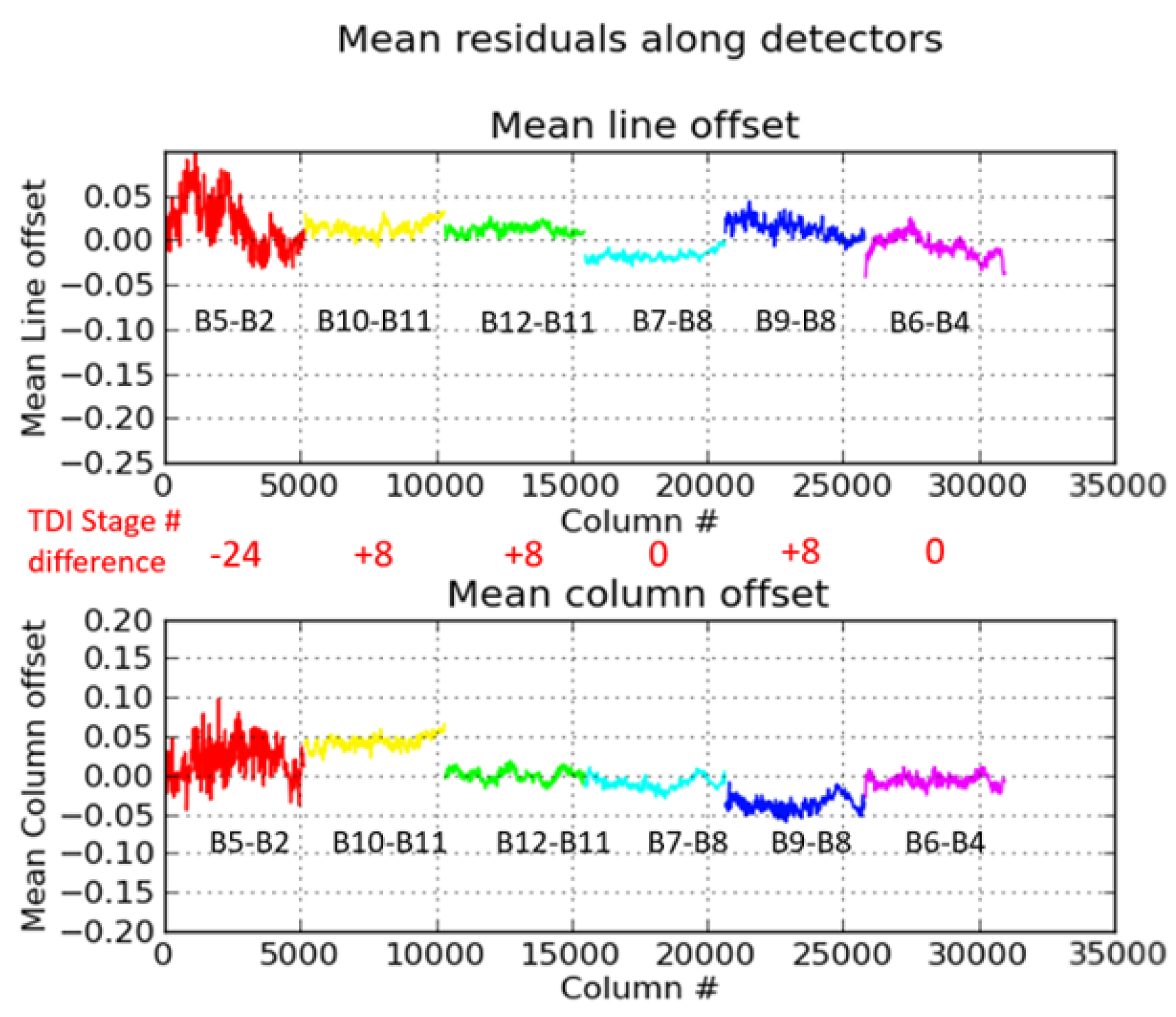
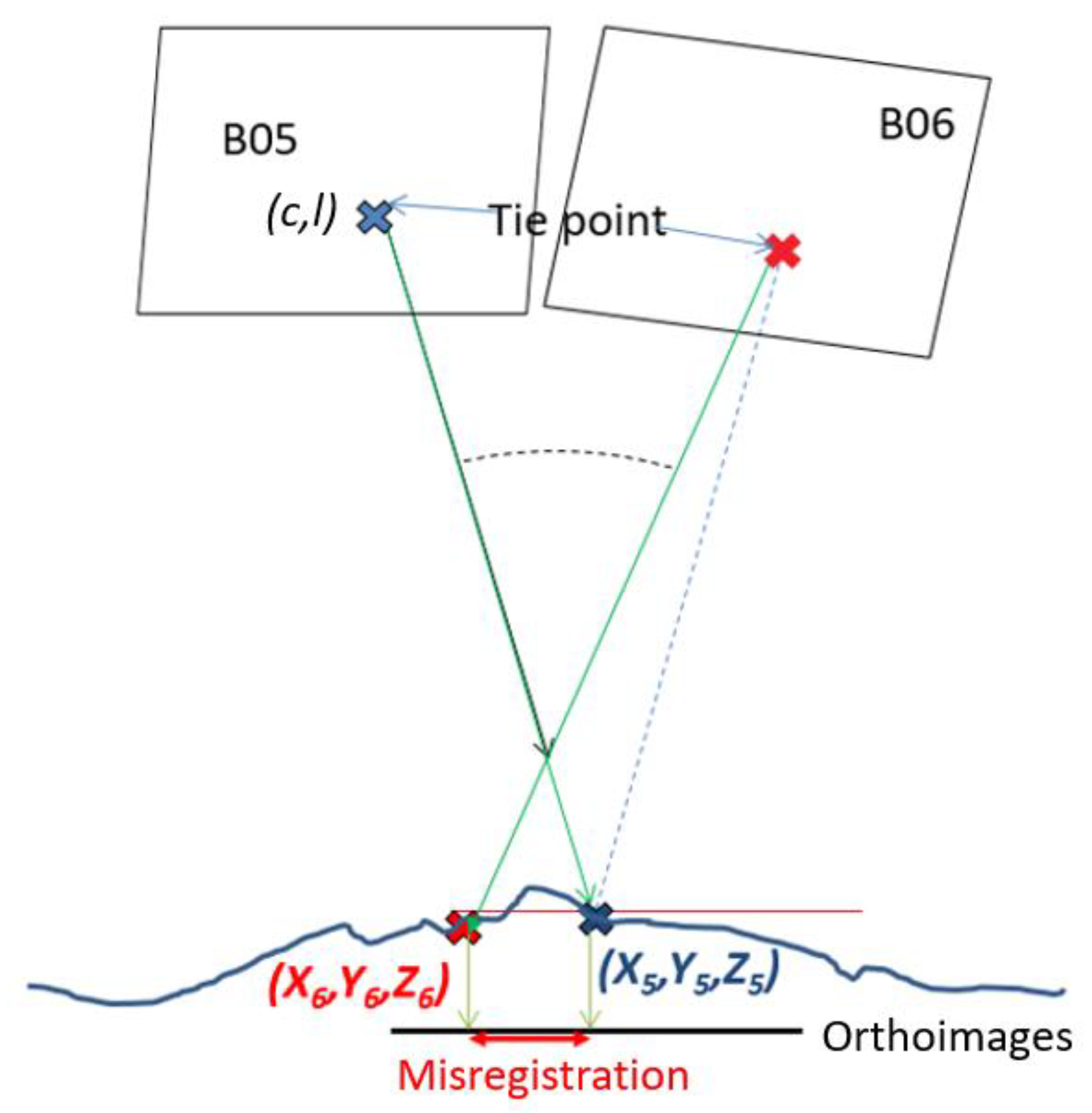
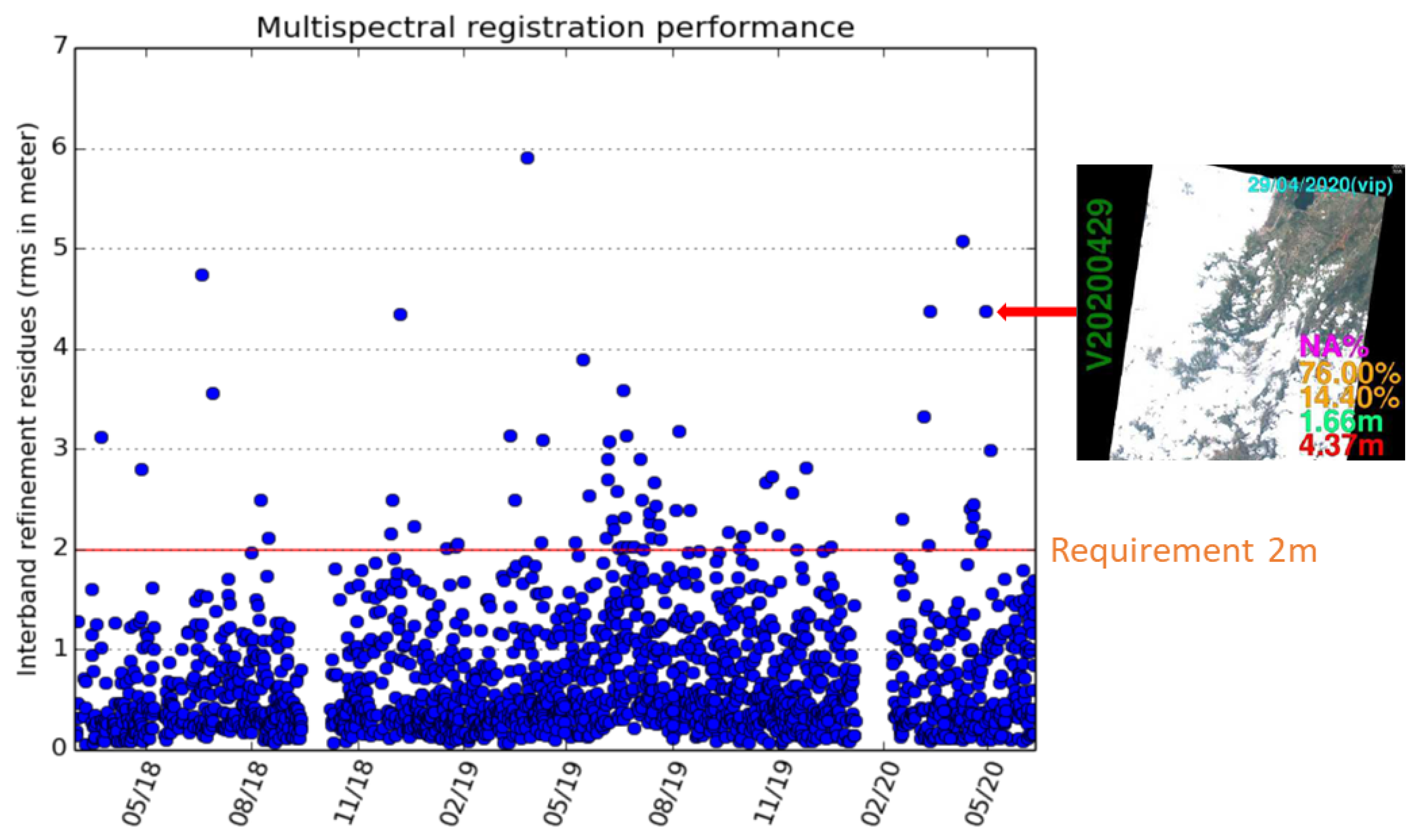
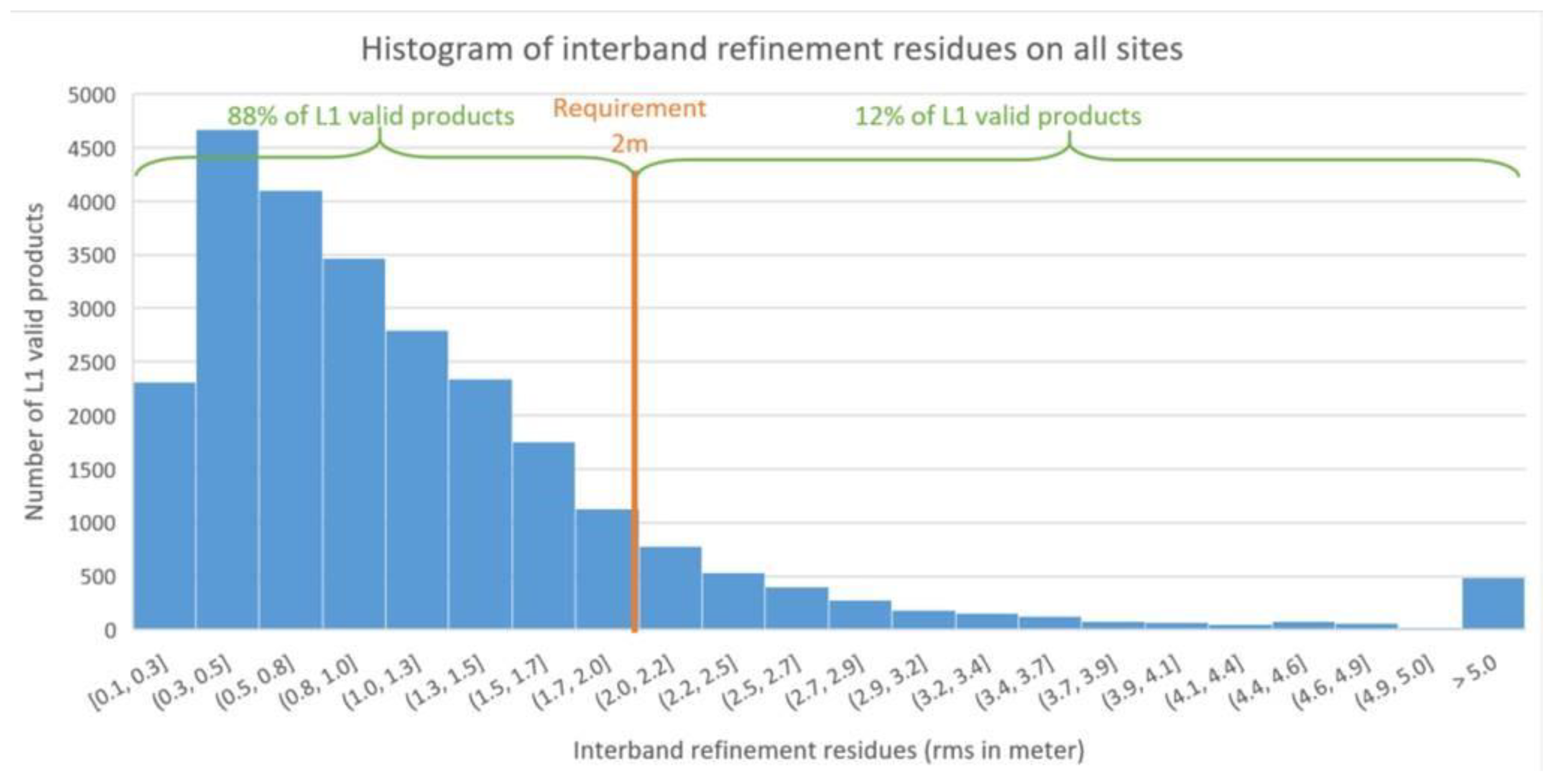
- Multi-Spectral Registration Performance
2.4. Performances of Level-2 VENμS Products
2.4.1. Level-2 Processing Method
- estimation of water vapor content using information from VENμS B12 band (909 nm) corresponding to a strong water vapor absorption band and B11 (861 nm) used as reference band outside the absorption band;
- correction of atmospheric gases, including water vapor; absorption with the Simplified Model for Atmospheric Correction (SMAC) software [20];
- determination of cloud, cloud shadow and water masks by combining multi-spectral and multi-temporal methods;
- determination of aerosol optical depths using both multi-spectral and multi-temporal methods;
- correction of aerosol absorption and scattering and Rayleigh scattering using look-up tables, precomputed with SOS (successive orders of scattering) radiative transfer code;
- adjacency effects corrections;
- slope and aspect corrections.
2.4.2. Level-2 Performances Assessment
Water Vapor Content Quality
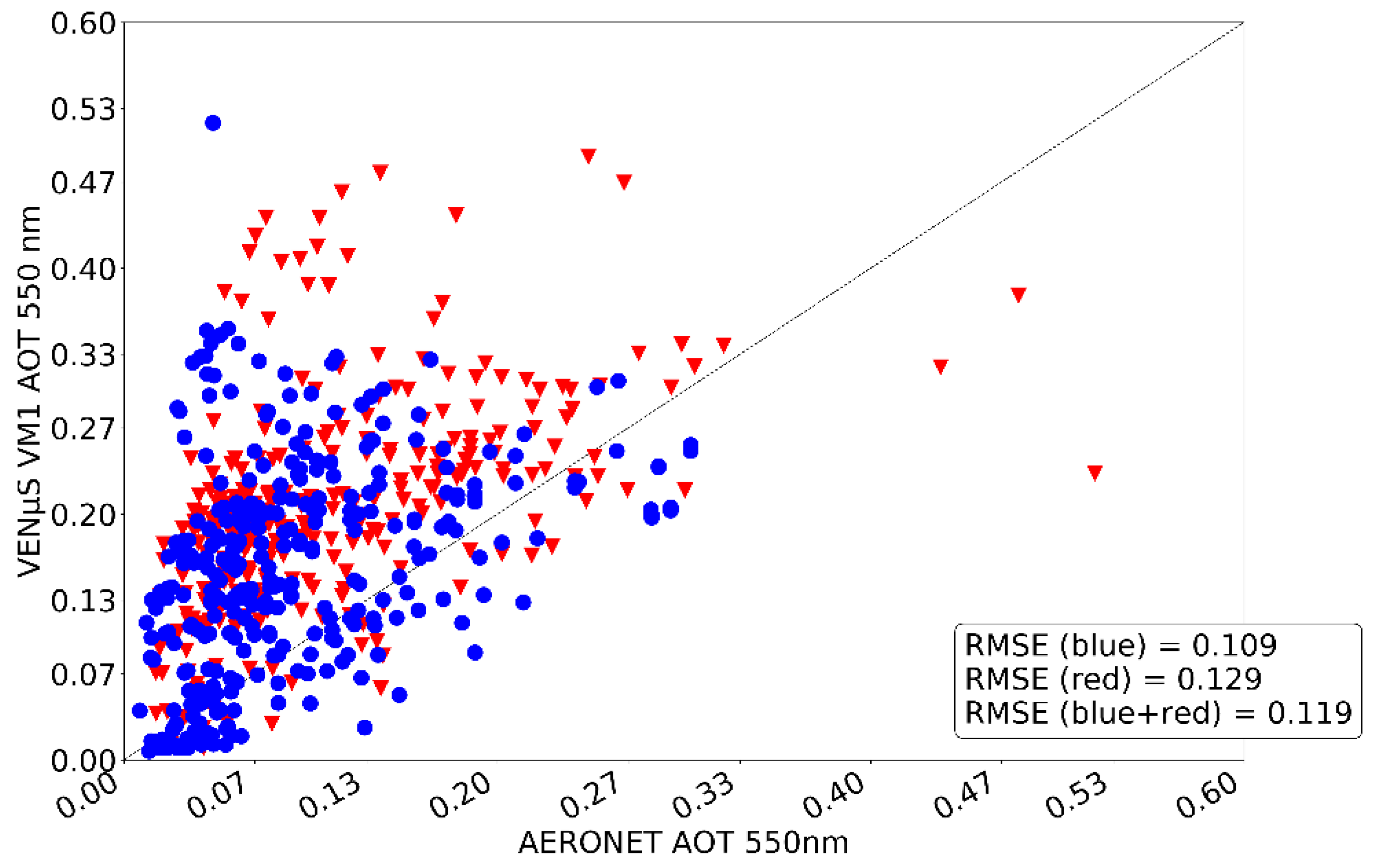
Aerosol Optical Depth Quality
2.5. Performances of Level-3 VENμS Products
2.5.1. Level-3 Processing Method
2.5.2. Level-3 Performances
3. Operations
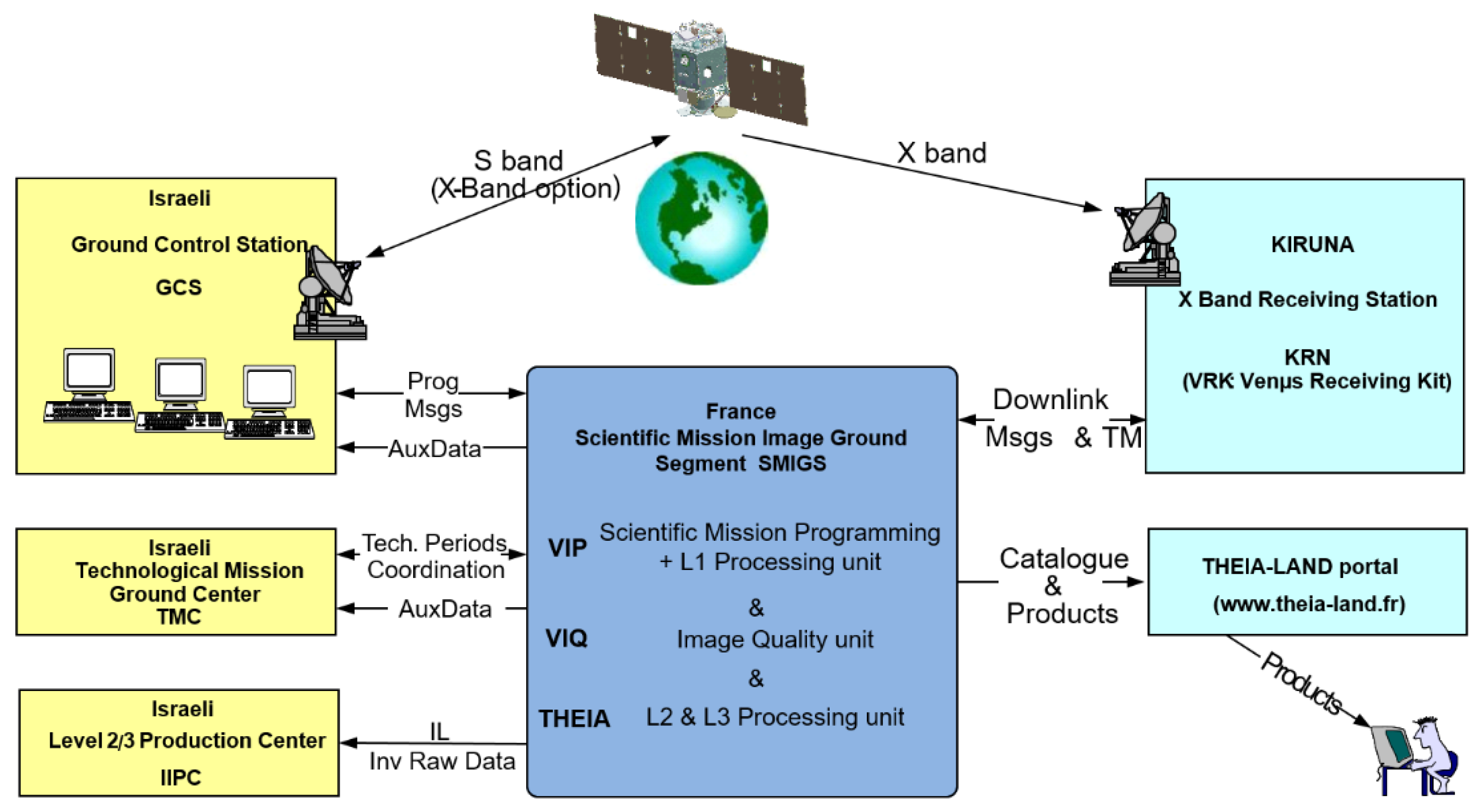
3.1. System Overview
- SMIGS and TMC exchange coordination information and files for scheduling scientific mission and technological mission period;
- SMIGS and GCS coordinate themselves to implement scientific mission, and elaborate downlink plans for X-Band Ground;
- TMC and GCS plan technological mission implementation, and exchange information on spacecraft state and satellite telemetry reports;
- GCS and Spacecraft exchange commands and telemetry;
- GCS and KRN station exchange orbital elements;
- Spacecraft and VENμS Receiving Station have Payload telemetry as main interface;
- SMIGS and VENμS Receiving Station exchange payload telemetry downloaded;
- TMC and VENμS Receiving Station exchange auxiliary data downloaded (as well as GCS and VENμS Receiving station);
- SMIGS and IIPC: periodically, the raw inventoried data and the L1 products relevant to Israel, when updated at CNES: ground image processing parameters (GIPPs) for L2 and L3 processes.
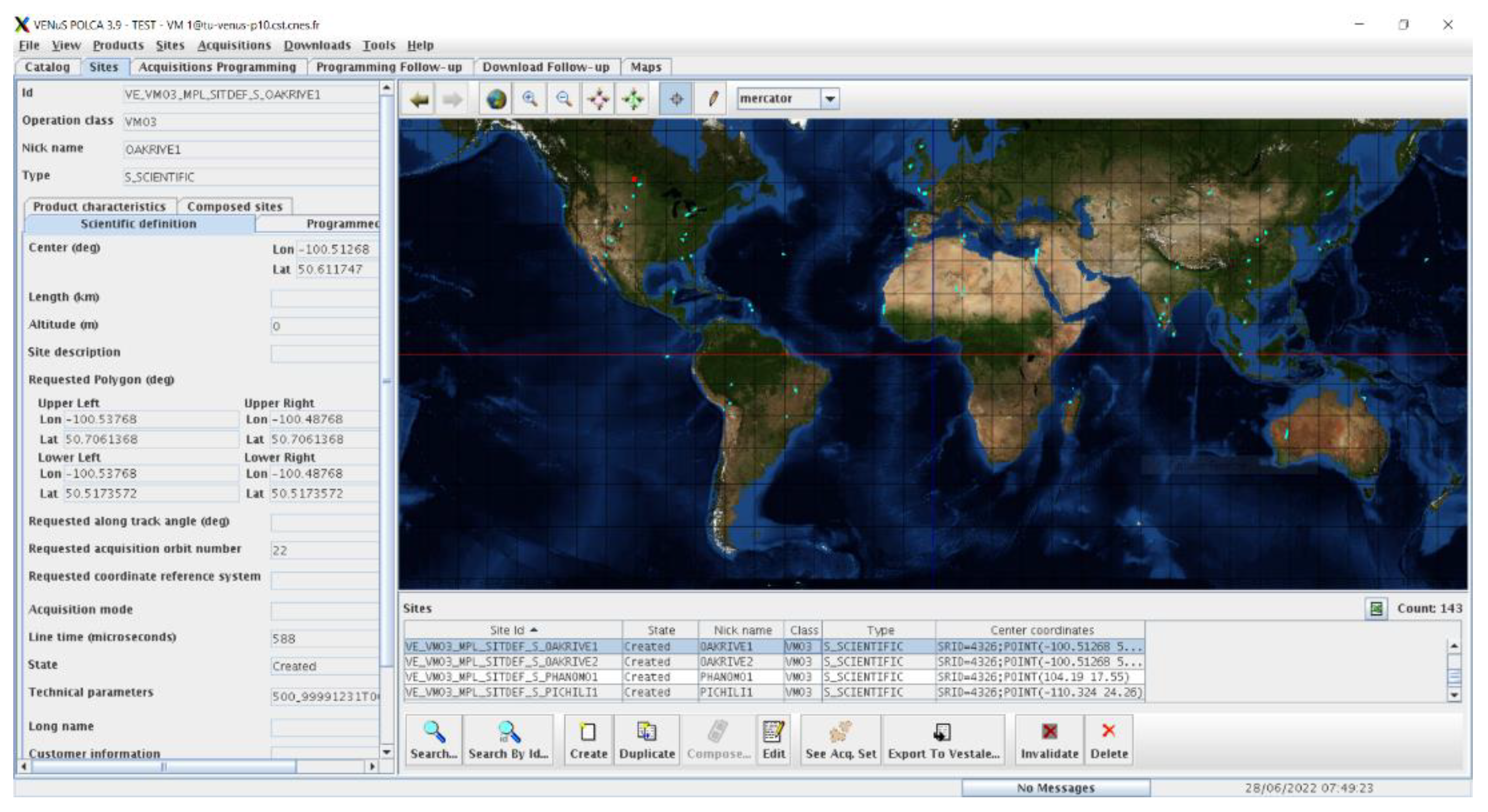
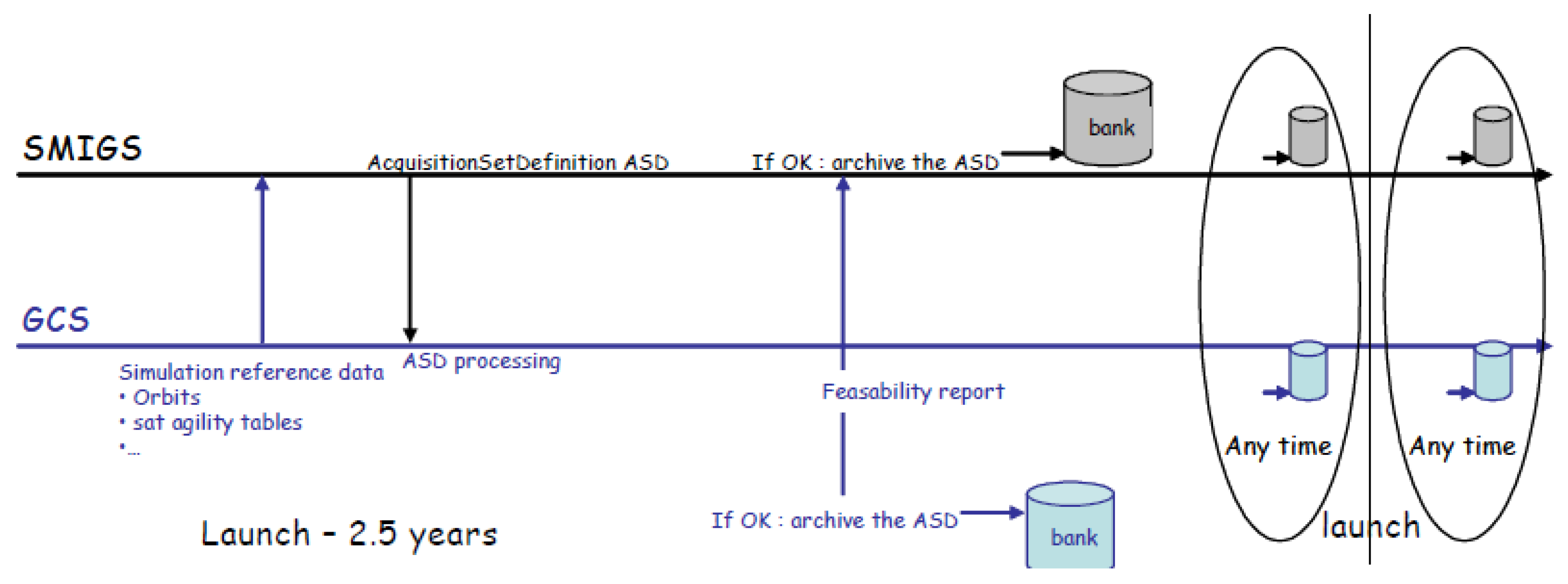
3.2. Mission Programming
3.2.1. Acquisition Set Definition
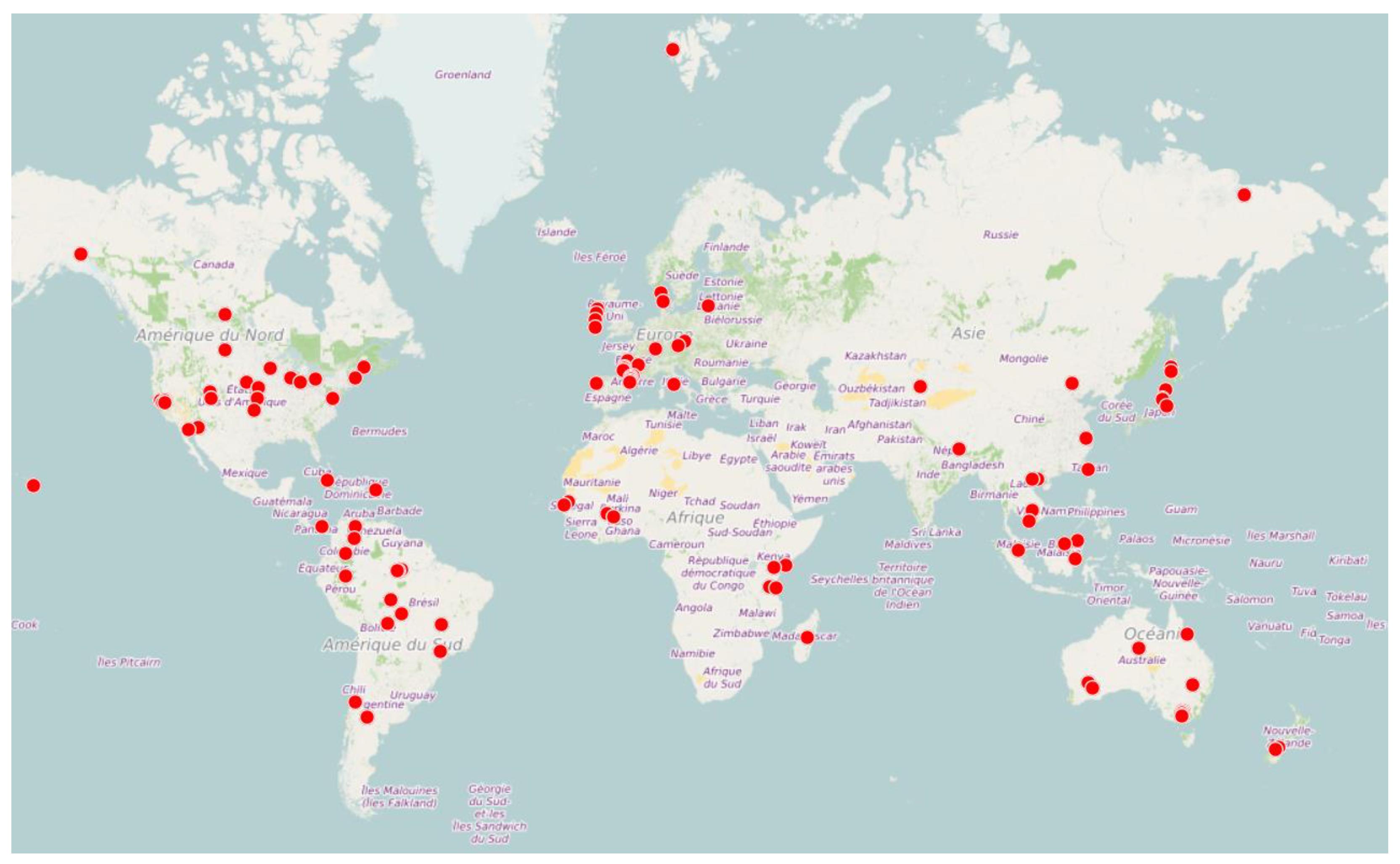
- a scientific site: a piece of earth of one to two contiguous images in given view angle positions;
- a composite site: a piece of earth of more than two contiguous images in given view angle positions;
- a calibration site: a piece of the planet continuously imaged in given view angle positions for image quality monitoring;
- a calibration/scan/strip: a piece of the planet continuously imaged in given view angle conditions, that corresponds on board to a time slot where the camera video output is continuously recorded;
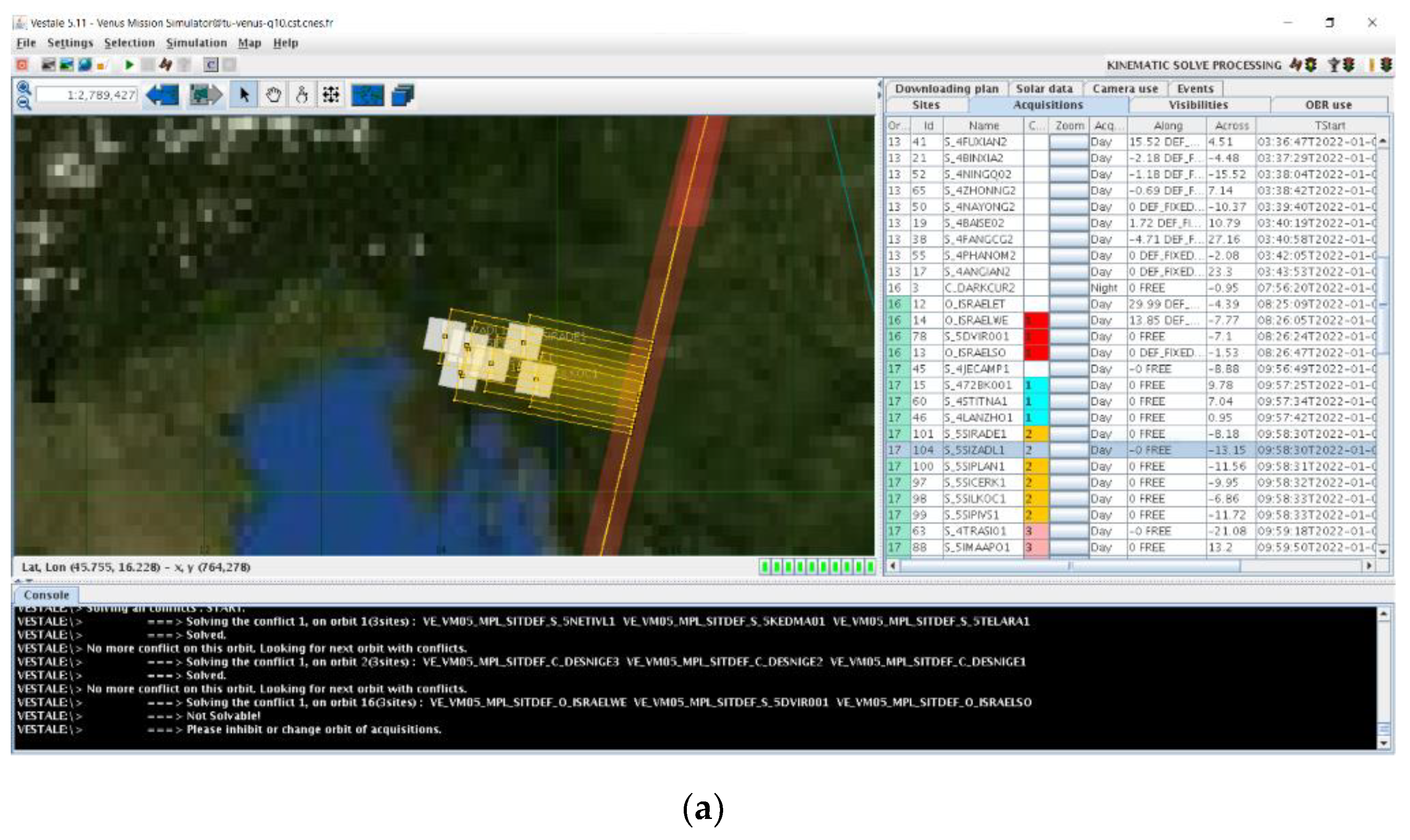
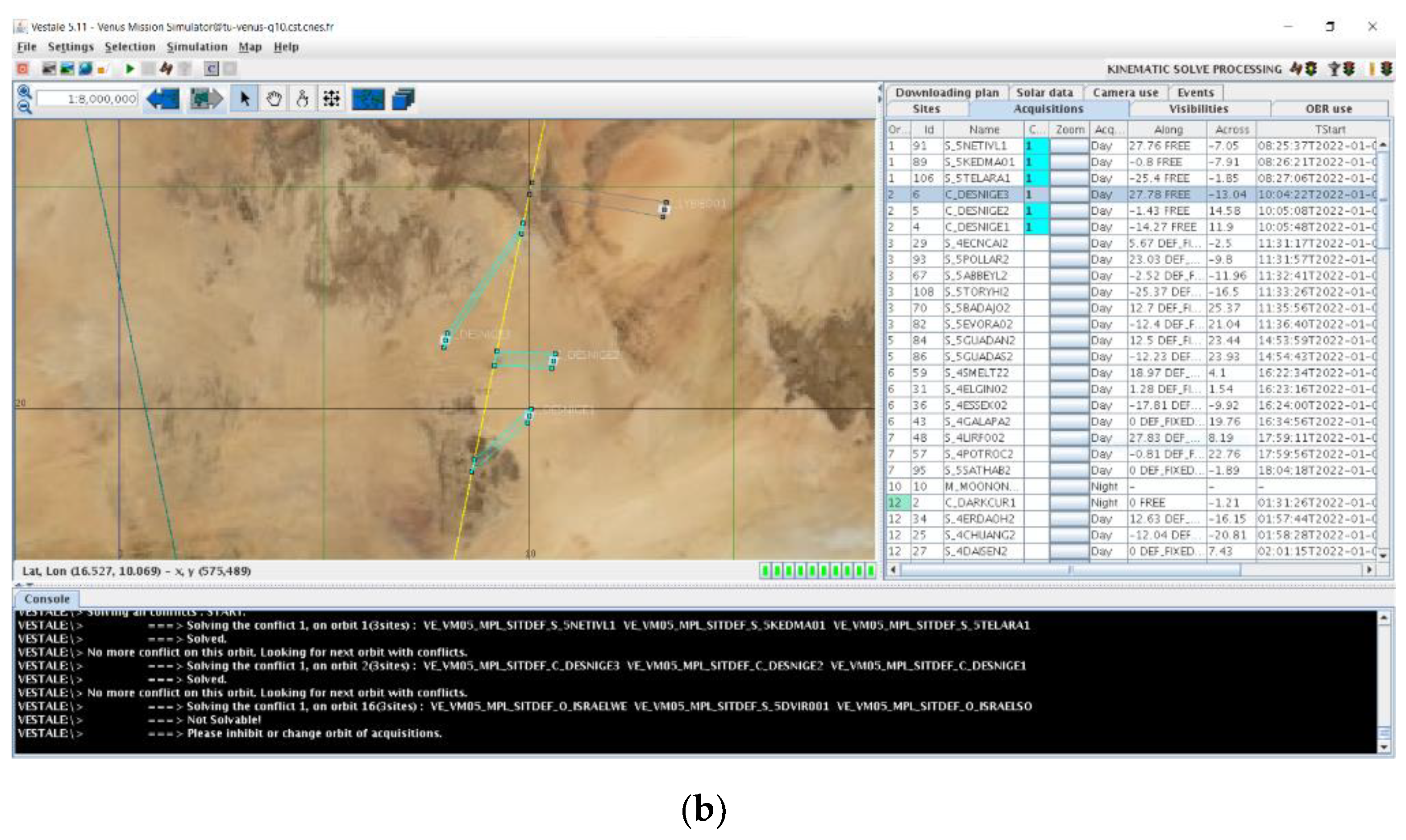
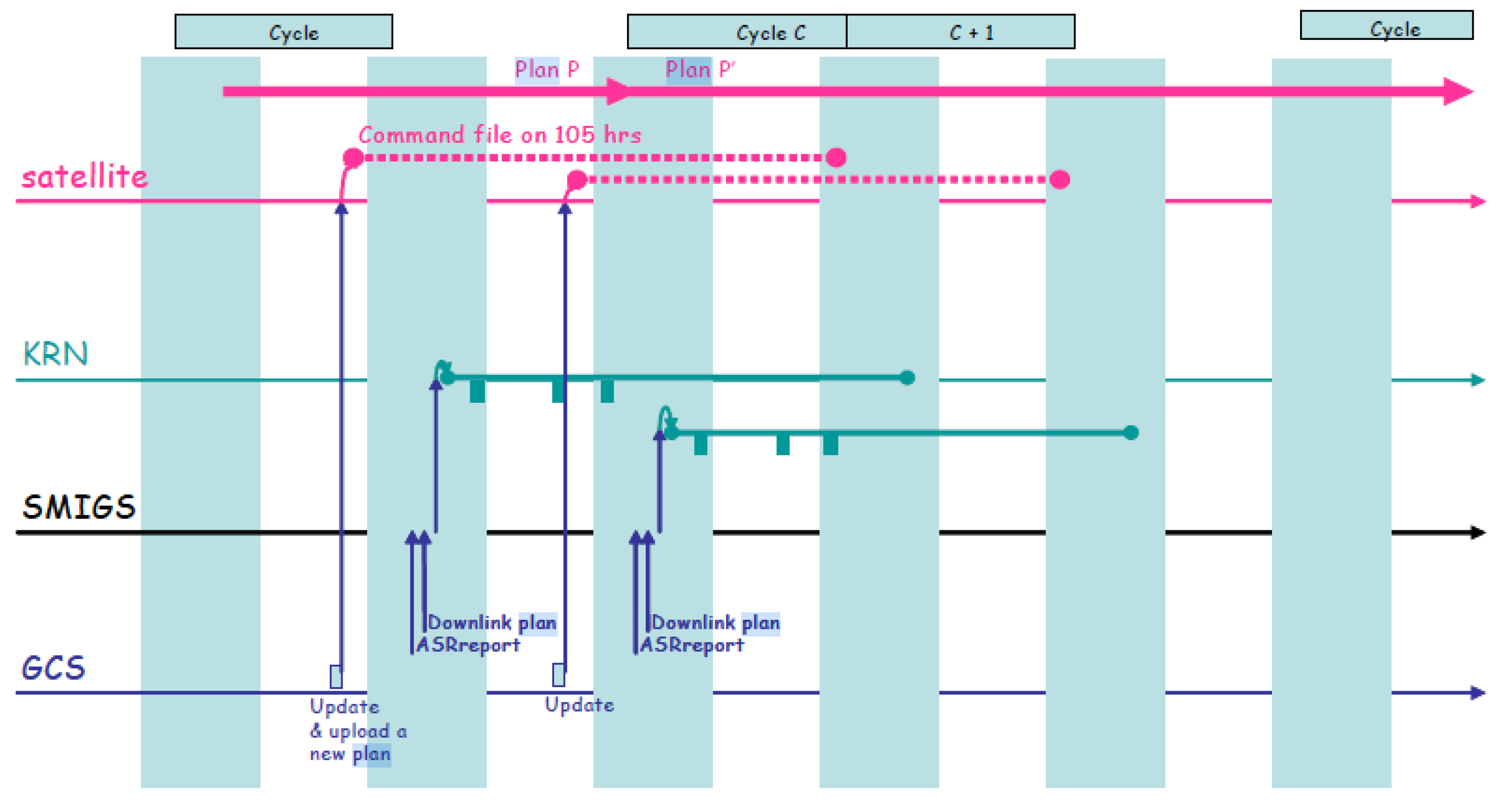
3.2.2. Scientific Mission Programming
4. Data Production and Monitoring
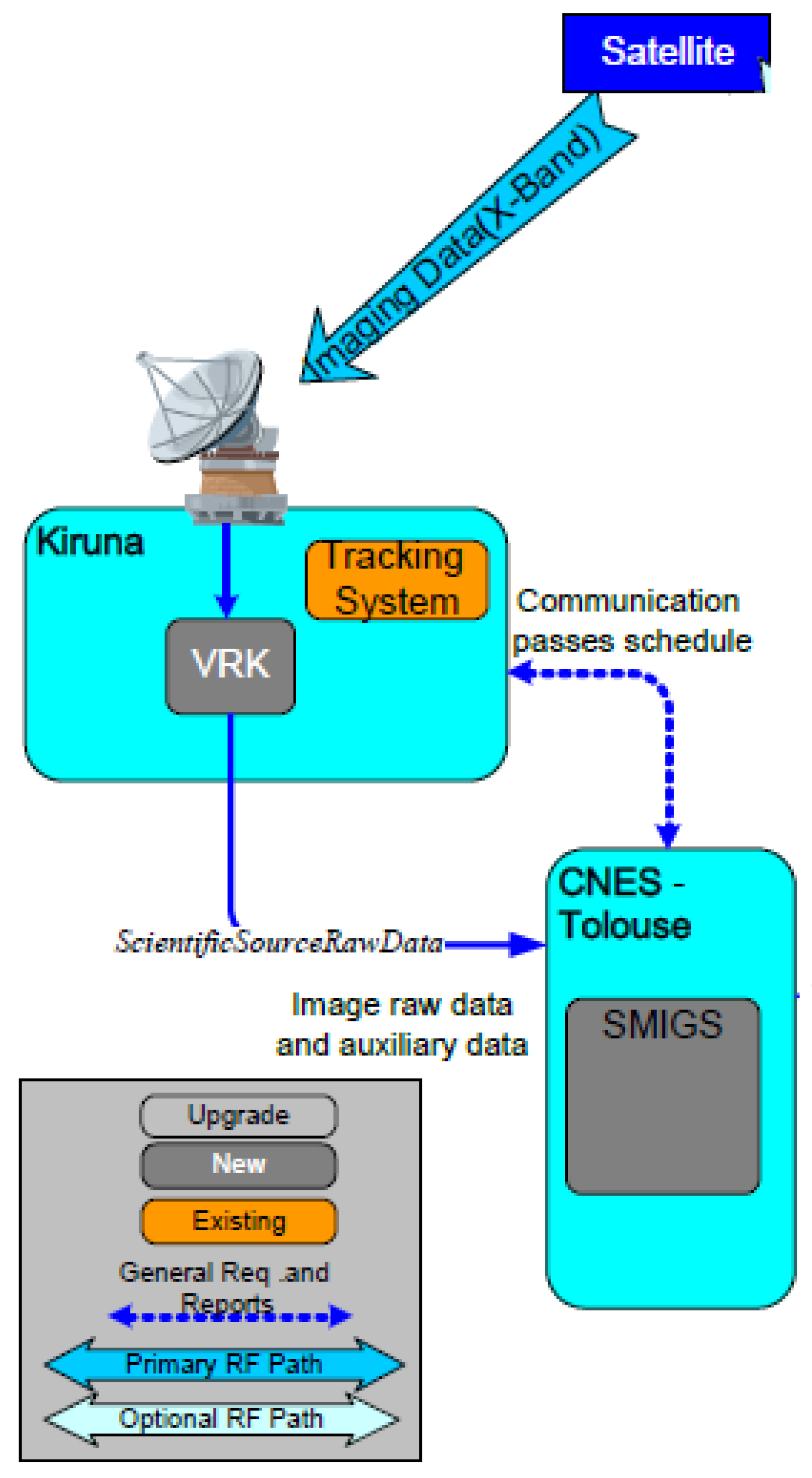
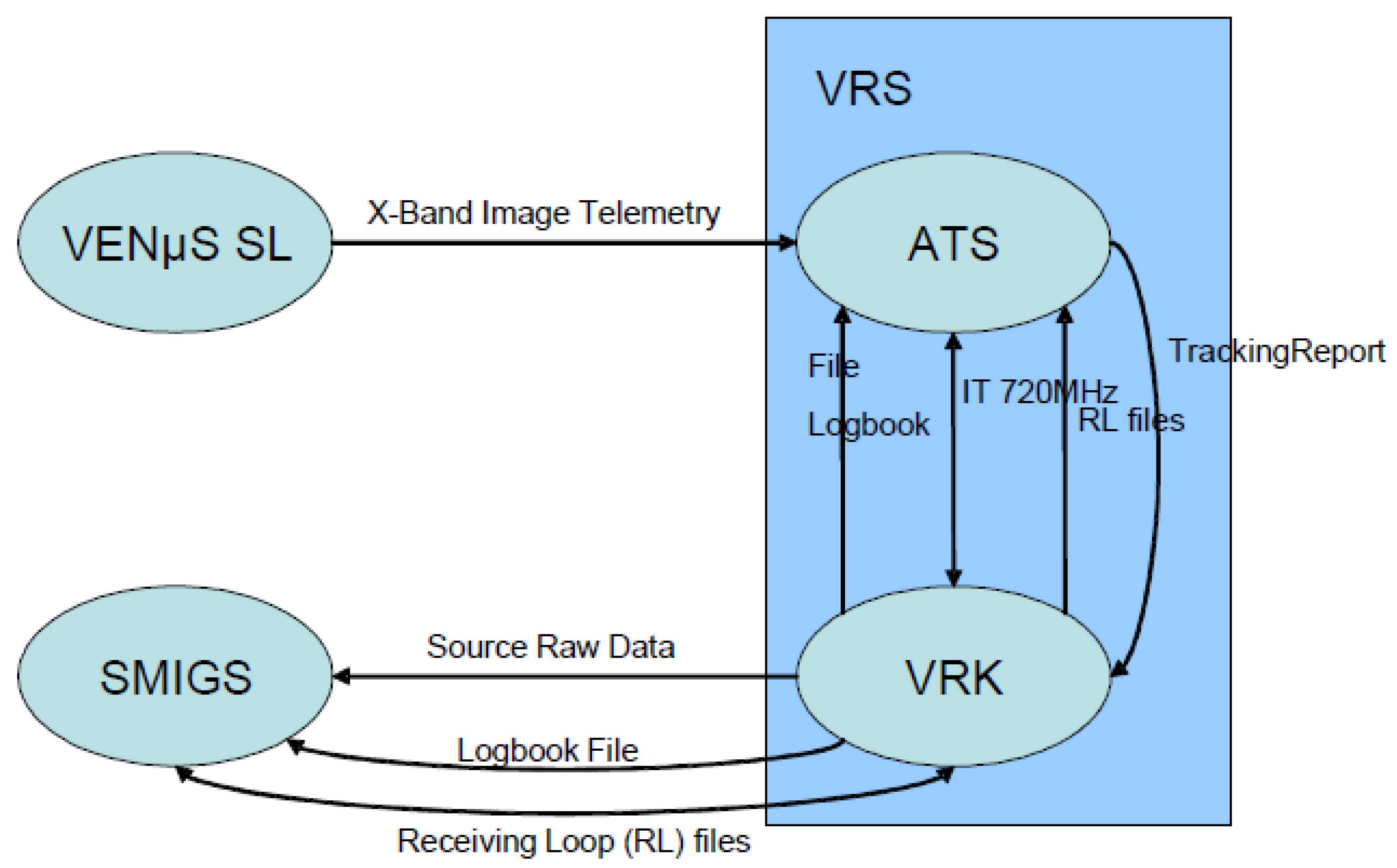
4.1. Telemetry Reception Process
- the Antenna and Tracking Sub-system (ATS), for tracking the satellite, receiving telemetry signal, and supplying it in 720 MHz to the VENμS Receiving Kit (VRK);
- the VENμS Receiving Kit (VRK) (see Figure 39), for converting the signal in 140 MHz, demodulating and decoding the signal, processing Image Telemetry signal and supplying the Source Raw Data to SMIGS VIP.
- From SMIGS-VIP to VRK:
- ○
- the Down Link Plan: the VRK locally archives programming file, schedules the corresponding downlinks and forwards the file to the ATS.
- In addition, from VRK to SMIGS-VIP:
- ○
- the Down Link Report: the report file produced by the VRK after each downlink to provide its detailed status;
- ○
- the Tracking Report: the report file is created by the ATS when tracking the spacecraft;
- ○
- the Scientific Raw Data: data are sent to the VIP server by X Band.
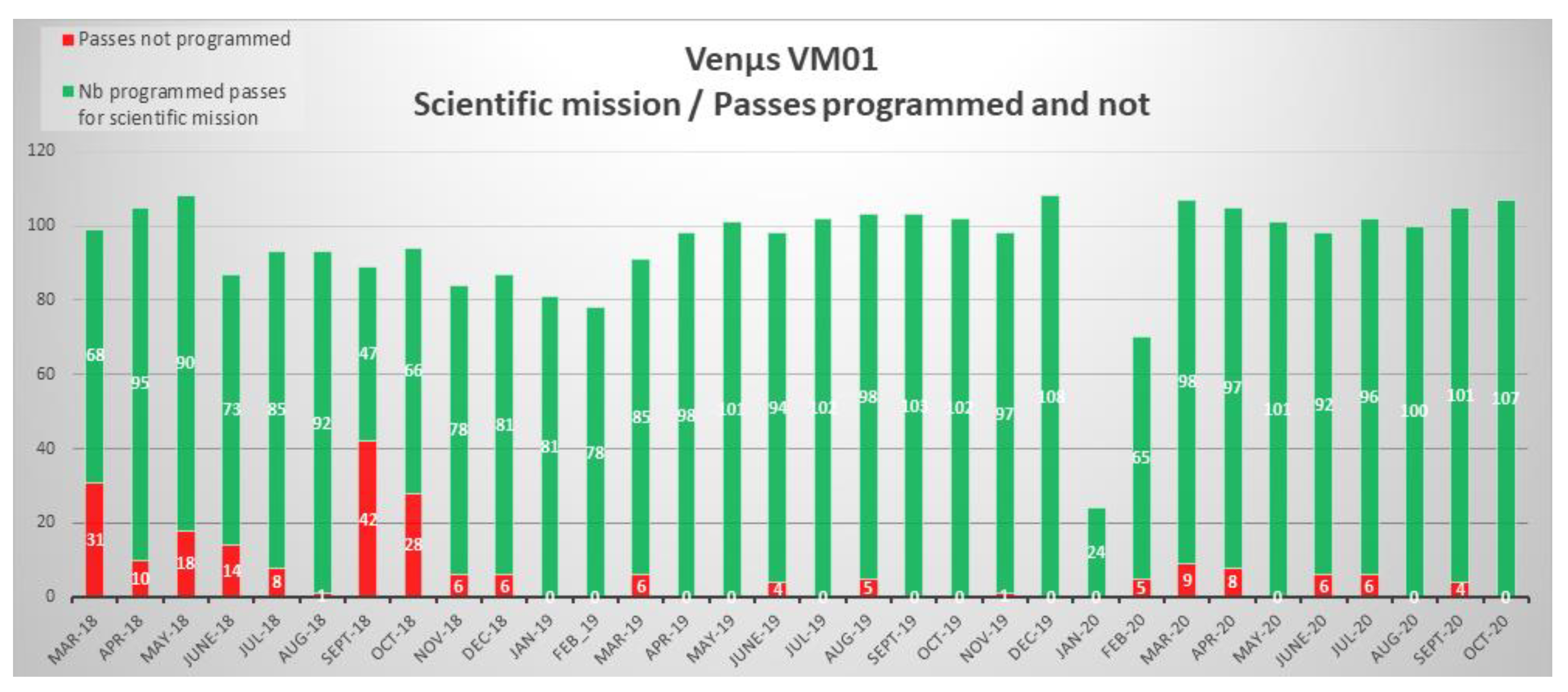
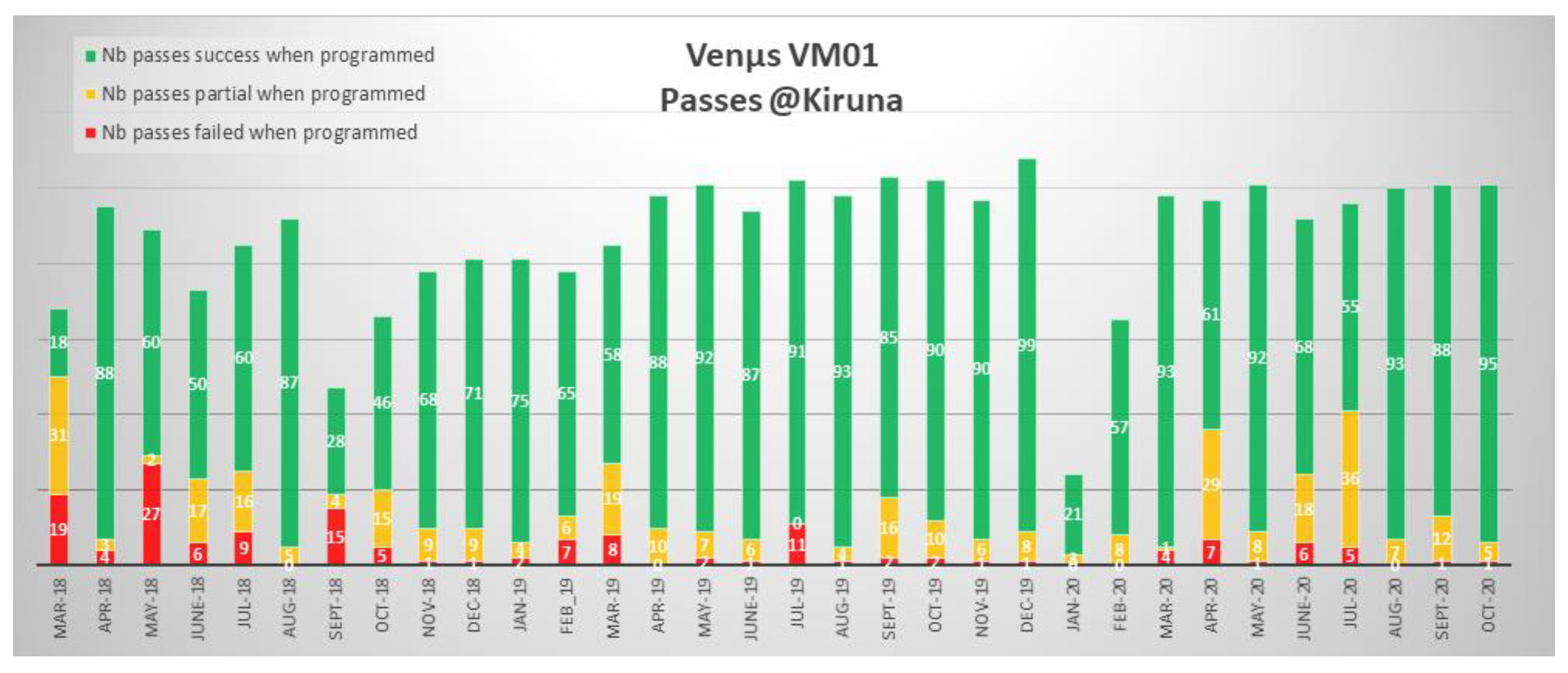
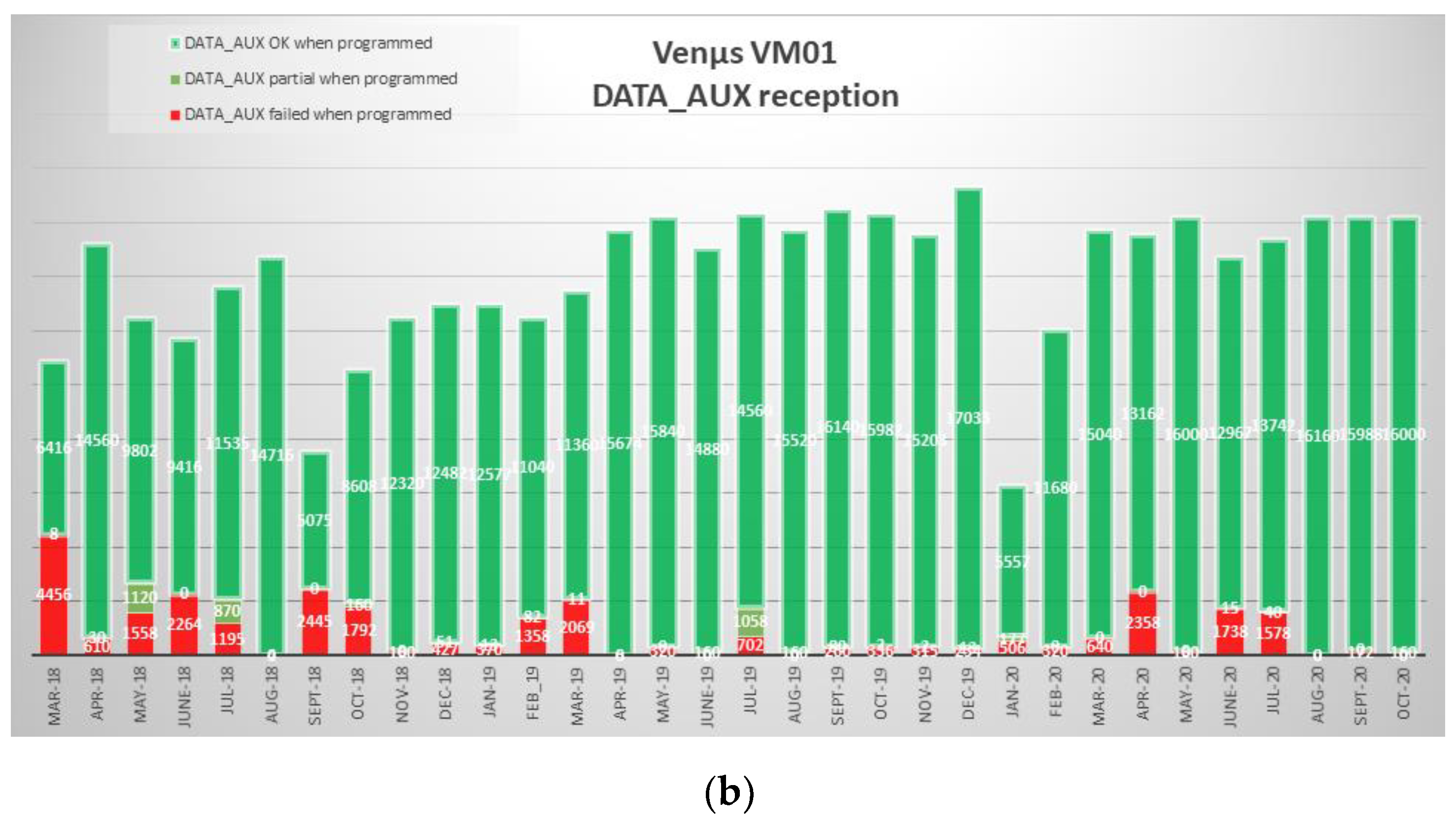
4.2. Telemetry Reception Statistics
- an average of 86% of theoretical data (programmed and not programmed) for all VM01 duration;
- 92% of theoretical data if we only consider the last year of operations;
- 94% of programmed data for all VM01 duration.
4.3. Operationnal Processing Chains
- VIP for Level-1 products;
- THEIA for Level-2 and-3 products (except for Israeli sites which are under Ben Gurion University responsibility).
4.3.1. VENμS Image Processor (VIP)
- equalization;
- interpolation of outlying detectors;
- persistance correction;
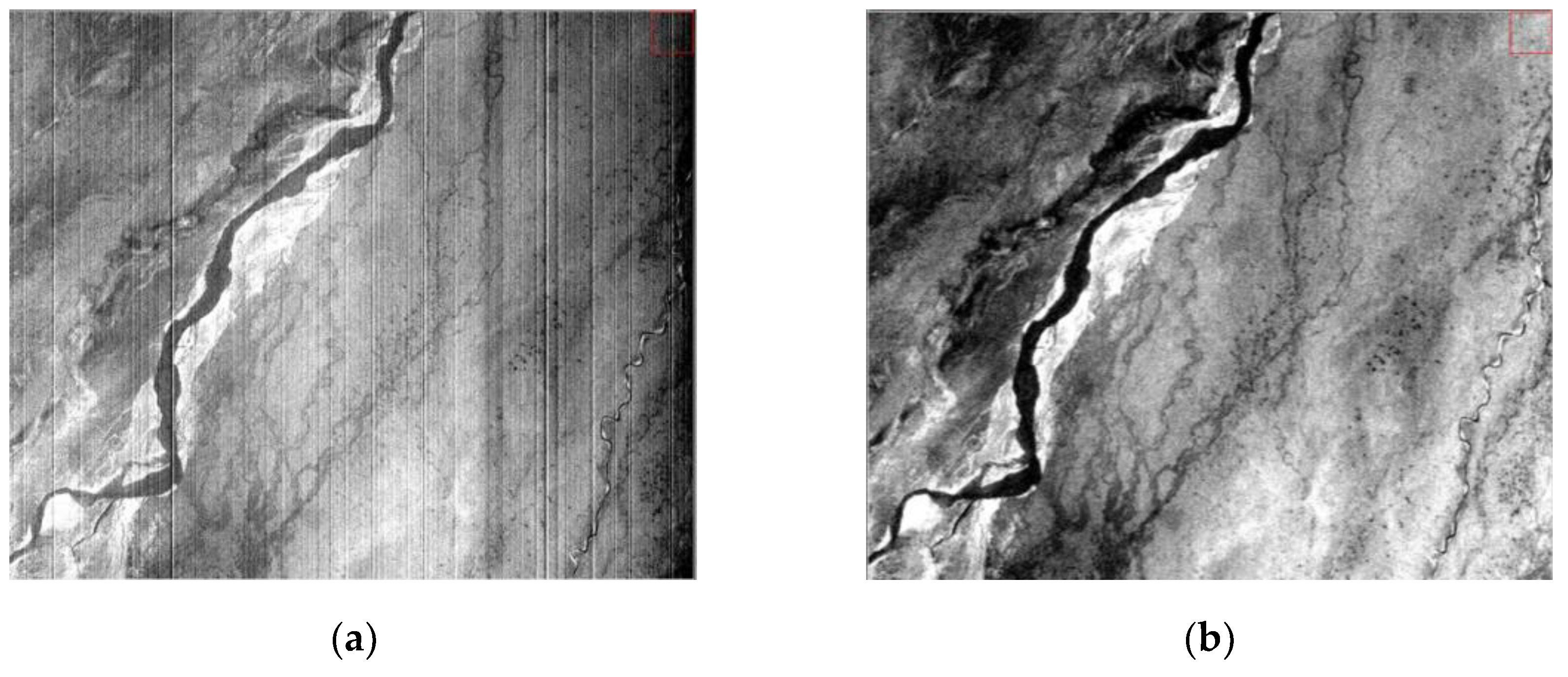
- restauration.
4.3.2. THEIA
4.4. Image Quality Monitoring
4.4.1. VENμS Image Quality Expertise Center (VIQ)
VIQ Missions
VIQ Breakdown
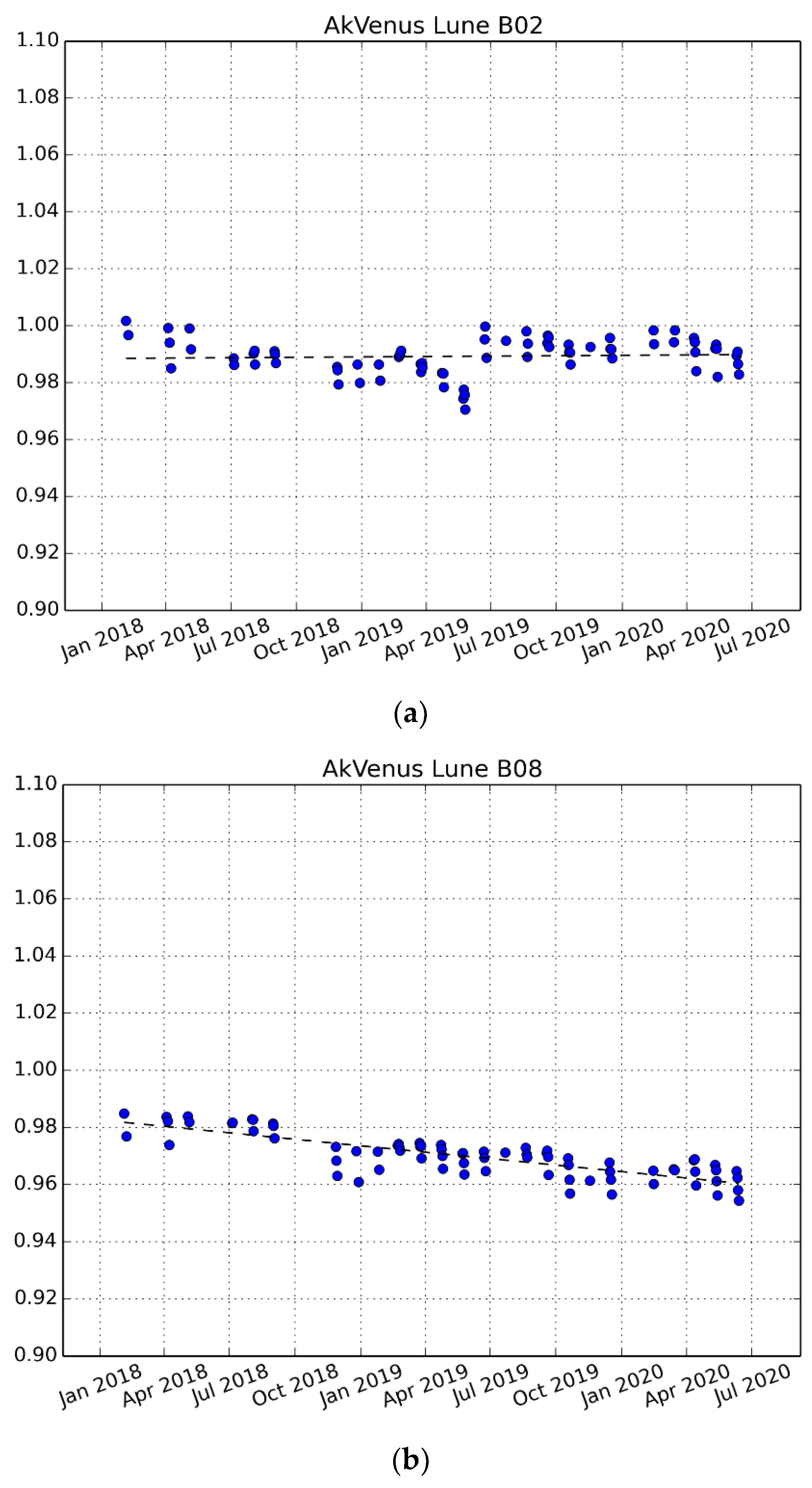
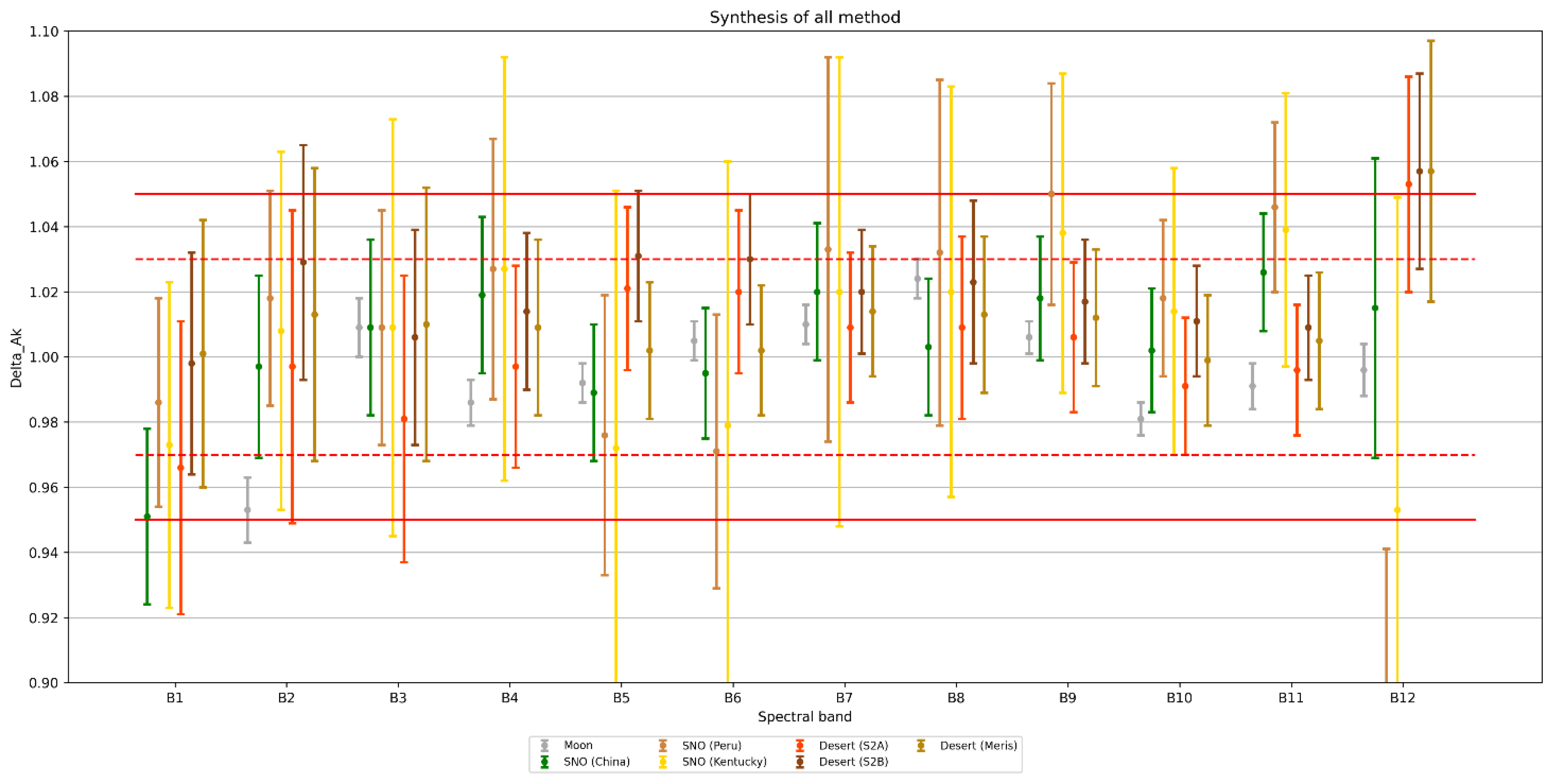
4.4.2. Radiometry Monitoring Activities
Simultaneous Nadir Observation: Sentinel2 Inter-Calibration Expertise
Desert Calibrations
Equalization and Instrument Noise Monitoring
4.4.3. Geometry Monitoring Activities
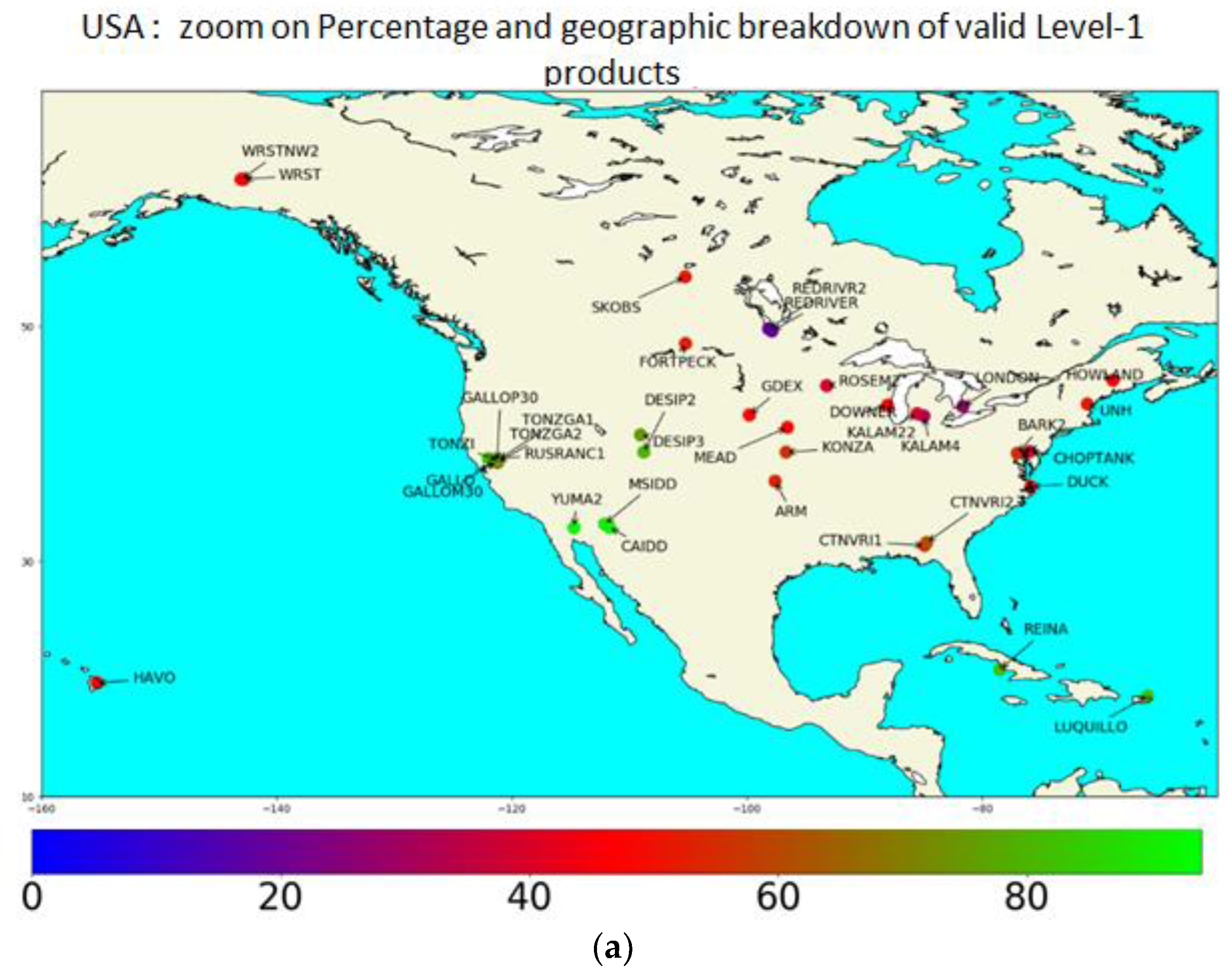
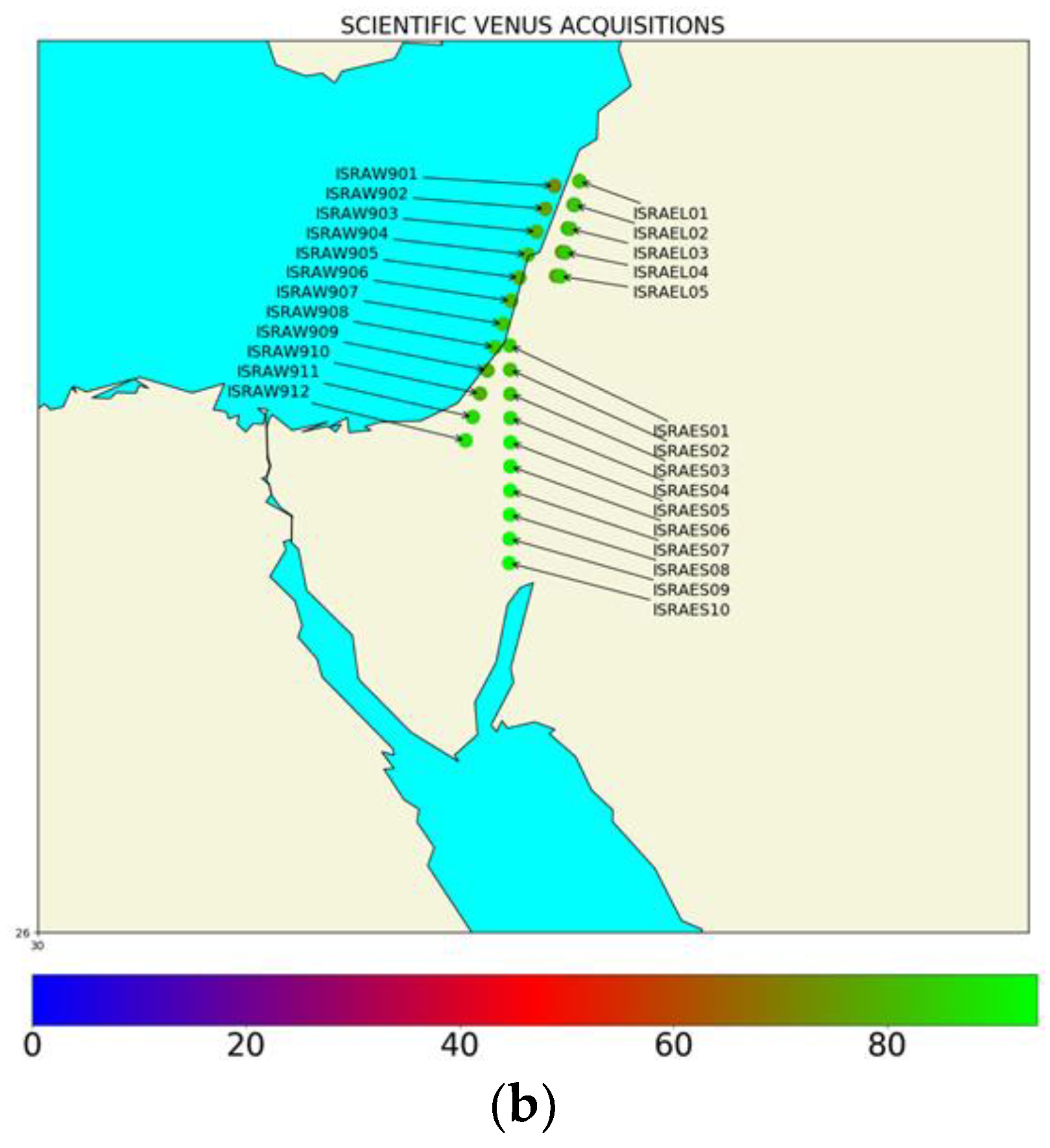
Geographical Sites Characteristics Management
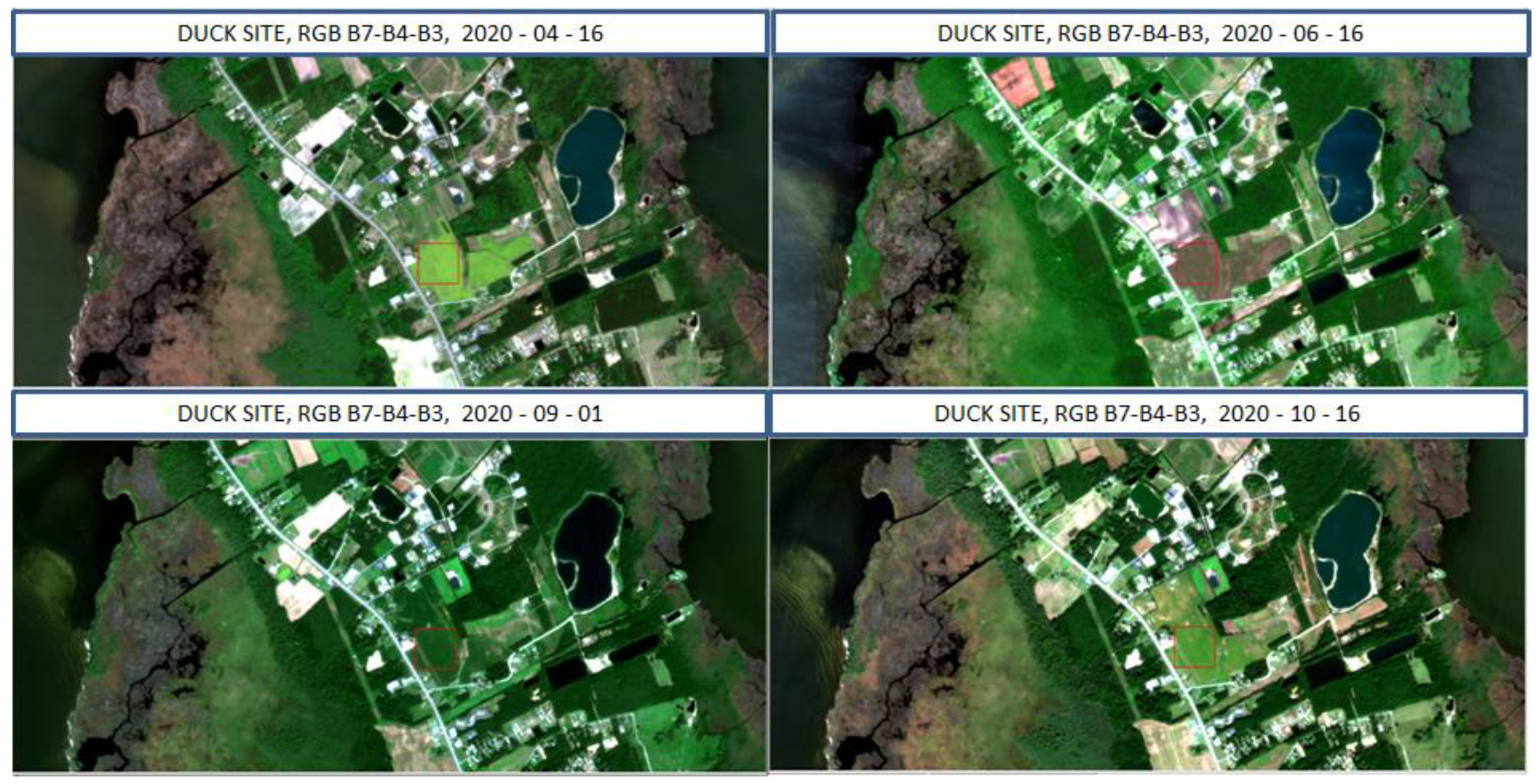
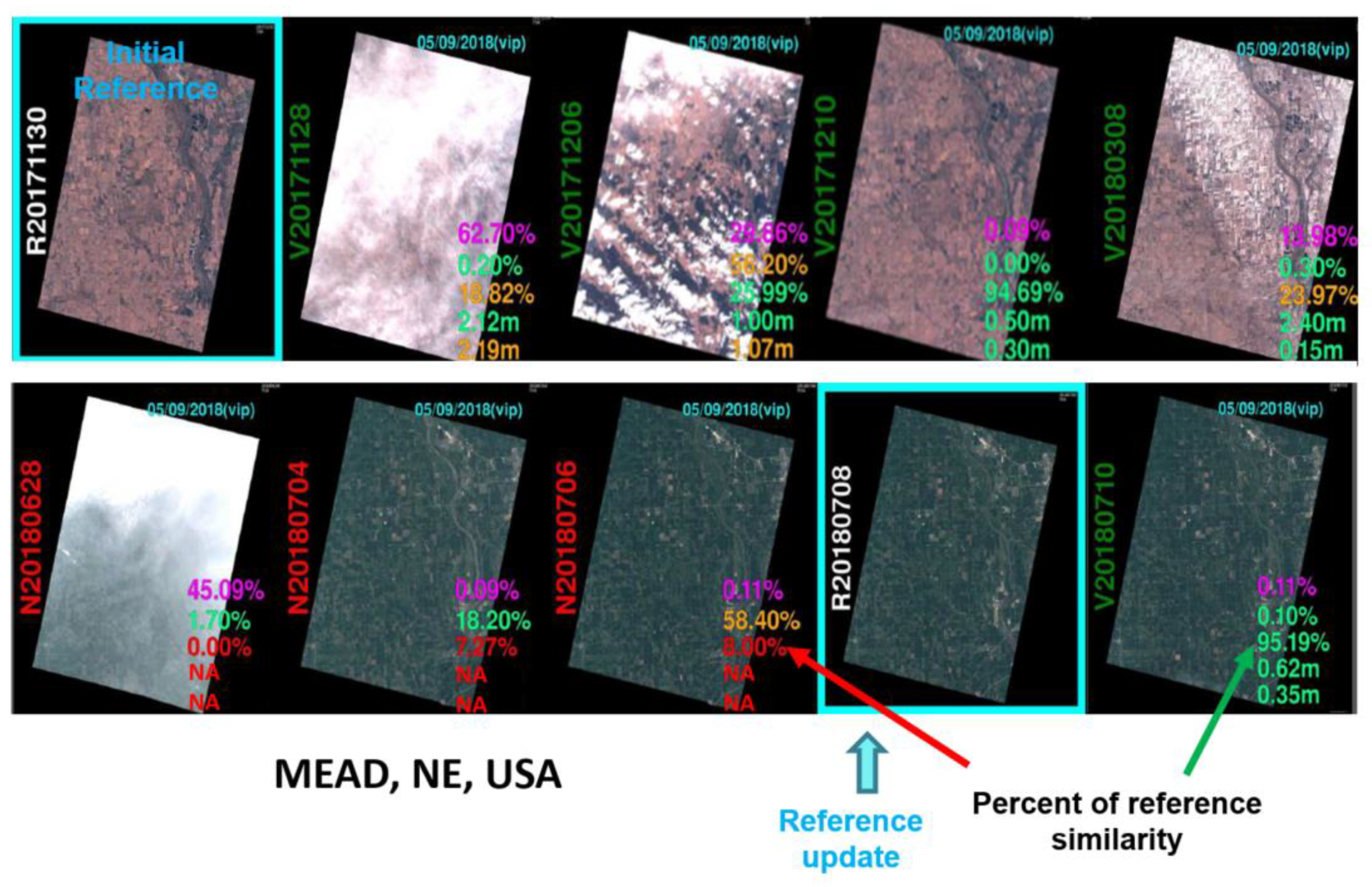
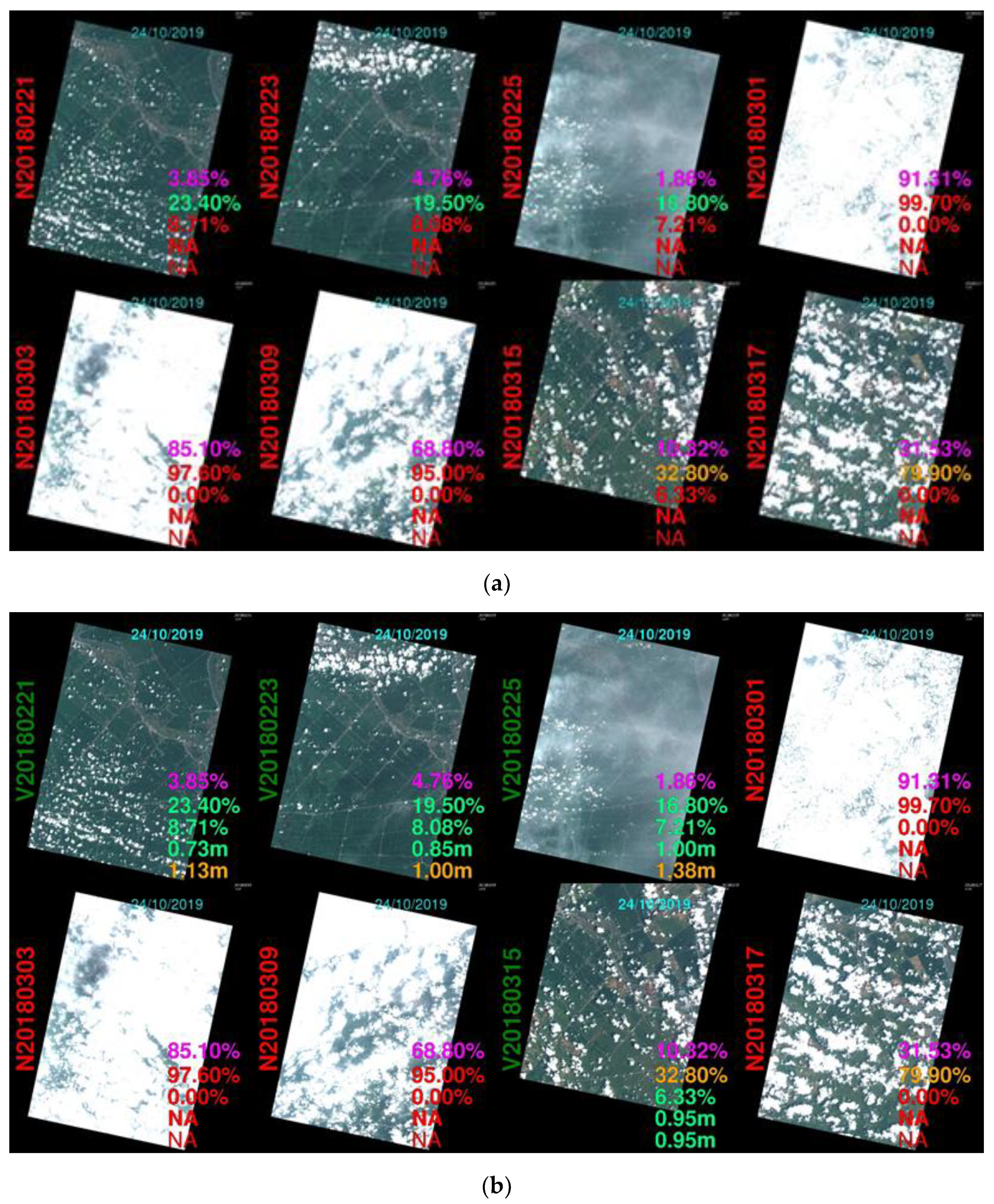
Reference Image Management
- Reference Image Definition
- Reference Image Monitoring
- Seasonal Updating
4.5. Production Statistics (L0, L1, L2, L3)
4.5.1. Raw (Level-0) Inventory Products
4.5.2. Level-1 Processing statistics
4.5.3. Level-2 Processing statistics
4.5.4. Level-3 Processing Statistics
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kimes, D.S. Dynamics of directional reflectance factor distributions for vegetation canopies. Appl. Opt. 1983, 22, 1364–1372. [Google Scholar] [CrossRef]
- Townshend, J.R.G. Global data sets for land applications from the Advanced Very High Resolution Radiometer: An introduction. Int. J. Remote Sens. 1994, 15, 3319–3332. [Google Scholar] [CrossRef]
- Maisongrande, P.; Duchemin, B.; Dedieu, G. VEGETATION/SPOT: An operational mission for the Earth monitoring: Presentation of new standard products. Int. J. Remote Sens. 2004, 25, 9–14. [Google Scholar] [CrossRef]
- Justice, C.O.; Vermote, E.; Townshend, J.R.G.; Defries, R.; Roy, D.P.; Hall, D.K.; Salomonson, V.V.; Privette, J.L.; Riggs, G.; Strahler, A.; et al. The Moderate Resolution Imaging Spectroradiometer (MODIS): Land remote sensing for global change research. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1228–1249. [Google Scholar] [CrossRef] [Green Version]
- Dedieu, G.; Cabot, F.; Chehbouni, A.; Duchemin, B.; Maisongrande, P.; Boulet, G.; Pellenq, J. RHEA: A micro-satellite mission for the study and modeling of land surfaces through assimilation techniques. In Proceedings of the EGS-AGU-EUG Joint Assembly, Nice, France, 6–11 April 2003; p. 8138. [Google Scholar]
- Dedieu, G.; Hagolle, O.; Karnieli, A.; Ferrier, P.; Crébassol, P.; Gamet, P.; Desjardins, C.; Yakov, M.; Cohen, M.; Hayun, E. VENµS: Performances and first results after 11th months in orbit. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7756–7759. [Google Scholar] [CrossRef]
- CEOS: Committee on Earth Observation Satellites. Analysis Ready Data for Land, Product Specification, Surface Reflectance. Version 5.0, June 2020. Available online: https://ceos.org/ard/ (accessed on 21 June 2022).
- Dick, A.; Gamet, P.; Marcq, S.; Dedieu, G.; Hagolle, O.; Crebassol, P.; Raynaud, J.-L.; Hillairet, E.; Enache, S.J. VENµS Commissioning Phase: Specificities of Radiometric Calibration. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 4320–4323. [Google Scholar] [CrossRef]
- Dick, A.; Dedieu, G.; Hagolle, O.; Raynaud, J.-L.; Pelou, S.; Burochin, J.-P.; Erudel, T. VENμS: VM01 Final Radiometric Assessment and Future Phases. In Proceedings of the IGARSS Proceedings, Brussels, Belgium, 11–16 July 2021. [Google Scholar]
- Lacherade, S.; Fougnie, B.; Henry, P.; Gamet, P. Cross Calibration Over Desert Sites: Description, Methodology, and Operational Implementation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1098–1113. [Google Scholar] [CrossRef]
- Meygret, A.; Blanchet, G.; Colzy, S.; Gross-Colzy, L. Improving ROLO lunar albedo model using PLEIADES-HR satellites extra-terrestrial observations. In Proceedings of Earth Observing Systems XXII; SPIE: San Diego, CA, USA, 2017; Volume 10402, p. 104022A. [Google Scholar] [CrossRef]
- Marcq, S.; Meygret, A.; Bouvet, M.; Fox, N.; Greenwell, C.; Scott, B.; Berthelot, B.; Besson, B.; Guilleminot, N.; Damiri, B. New Radcalnet Site at Gobabeb, Namibia: Installation of the Instrumentation and First Satellite Calibration Results. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 23–27 July 2018; pp. 6444–6447. [Google Scholar] [CrossRef]
- Frouin, R.; Sei, A.; Hauss, B.; Pratt, P. Operational in-flight calibration of NPP VIIRS in the visible using Rayleigh scattering. In Proceedings of Earth Observing Systems XIX; SPIE: San Diego, CA, USA, 2014; Volume 9218, p. 921806. [Google Scholar]
- Hillairet, E.; Enache, S.J.; Burochin, J.-P.; Dick, A.; Marcq, S.; Hagolle, O.; Raynaud, J.-L.; Gamet, P. VENµS in orbit radiometric calibration. In Proceedings of Sensors, Systems, and Next-Generation Satellites XXII; SPIE: Berlin, Germany, 2018; Volume 10785, p. 1078513. [Google Scholar] [CrossRef]
- Gamet, P.; Fourest, S.; Sprecher, T.; Hillairet, E. Measuring, modelling and removing optical stray light from VENµS Super Spectral Camera Images. In Proceedings of the International Conference on Space Optics—ICSO 2018, Chania, Greece, 9–12 October 2018; Volume 11180, p. 111804F. [Google Scholar] [CrossRef]
- Binet, R.; De Lussy, F.; Languille, F.; Rolland, A.; Raynaud, J.-L.; Specht, B.; Gamet, P. VENµS geometric image quality commissioning. In Proceedings of Sensors, Systems, and Next-Generation Satellites XXII; SPIE: Berlin, Germany, 2018; Volume 10785, p. 107850J. [Google Scholar] [CrossRef]
- Hagolle, O.; Huc, M.; Villa Pascual, D.; Dedieu, G. A Multi-Temporal and Multi-Spectral Method to Estimate Aerosol Optical Thickness over Land, for the Atmospheric Correction of FormoSat-2, LandSat, VENμS and Sentinel-2 Images. Remote Sens. 2015, 7, 2668–2691. [Google Scholar] [CrossRef] [Green Version]
- Richter, R.; Schläpfer, D.; Müller, A. An automatic atmospheric correction algorithm for visible/NIR imagery. Int. J. Remote Sens. 2006, 27, 2077–2085. [Google Scholar] [CrossRef]
- Hagolle, O.; Huc, M.; Desjardins, C.; Auer, S.; Richter, R. MAJA Algorithm Theoretical Basis Document (Version 1.0). Zenodo 2017. [Google Scholar] [CrossRef]
- Rahman, H.; Dedieu, G. SMAC: A simplified method for the atmospheric correction of satellite measurements in the solar spectrum. Int. J. Remote Sens. 1994, 15, 123–143. [Google Scholar] [CrossRef]
- Holben, B.N.; Eck, T.F.; Slutsker, I.; Tanre, D.; Buis, J.P.; Setzer, A.; Vermote, E.; Reagan, J.A.; Kaufman, Y.J.; Nakajima, T.; et al. AERONET—A Federated Instrument Network and Data Archive for Aerosol Characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Rouquié, B.; Hagolle, O.; Bréon, F.-M.; Boucher, O.; Desjardins, C.; Rémy, S. Using Copernicus Atmosphere Monitoring Service Products to Constrain the Aerosol Type in the Atmospheric Correction Processor MAJA. Remote Sens. 2017, 9, 1230. [Google Scholar] [CrossRef] [Green Version]
- White, J.C.; Wulder, M.; Hobart, G.; Luther, J.; Hermosilla, T.; Griffiths, P.; Coops, N.; Hall, R.J.; Hostert, P.; Dyk, A.; et al. Pixel-Based Image Compositing for Large-Area Dense Time Series Applications and Science. Can. J. Remote Sens. 2014, 40, 192–212. [Google Scholar] [CrossRef] [Green Version]
- Holben, B.N. Characteristics of maximum-value composite images from temporal AVHRR data. Int. J. Remote Sens. 1986, 7, 1417–1434. [Google Scholar] [CrossRef]
- Hagolle, O.; Lobo, A.; Maisongrande, P.; Cabot, F.; Duchemin, B.; De Pereyra, A. Quality assessment and improvement of temporally composited products of remotely sensed imagery by combination of VEGETATION 1 and 2 images. Remote Sens. Environ. 2005, 94, 172–186. [Google Scholar] [CrossRef] [Green Version]
- Baetens, L.; Desjardins, C.; Hagolle, O. Validation of copernicus Sentinel-2 cloud masks obtained from MAJA, Sen2Cor, and FMask processors using reference cloud masks generated with a supervised active learning procedure. Remote Sens. 2019, 11, 433. [Google Scholar] [CrossRef] [Green Version]
- Skakun, S.; Wevers, J.; Brockmann, C.; Doxani, G.; Aleksandrov, M.; Batič, M.; Frantz, D.; Gascon, F.; Gómez-Chova, L.; Hagolle, O.; et al. Cloud Mask Intercomparison eXercise (CMIX): An evaluation of cloud masking algorithms for Landsat 8 and Sentinel-2. Remote Sens. Environ. 2022, 274, 2022. [Google Scholar] [CrossRef]
- Hagolle, O.; Morin, D.; Kadiri, M. Detailed Processing Model for the Weighted Average Synthesis Processor (WASP) for Sentinel-2 (1.4). Zenodo 2018. [Google Scholar] [CrossRef]
- THEIA Website. Available online: https://www.theia-land.fr/en (accessed on 21 June 2022).
- Raynaud, J.-L.; Specht, B.; Crebassol, P.; Gamet, P.; De Lussy, F.; Ferrier, P.; Sylvander, S.; Cohen, M.; Yakov, M.; Debaecker, V.; et al. VENµS Image Quality monitoring: A challenging multi-phased organization. In Proceedings of the 2018 SpaceOps Conference, Marseille, France, 28 May–1 June 2018. [Google Scholar] [CrossRef]
- PLANET OBSERVER Website. Available online: http://planetobserver.com/global-elevation-data/ (accessed on 21 June 2022).
- Shean, D.E.; Arendt, A.A.; Osmanoglu, B.; Montesano, P. High-Resolution DEMs for High-Mountain Asia: A systematic, Region-Wide Assessment of Geodetic Glacier Mass Balance and Dynamics; American Geophysical Union: Washington, DC, USA, 2017; Volume 2017. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Radiometry | Geometry | User |
|---|---|---|---|
| 0 | Raw | Raw | Internal |
| 1A | Radiometric corrections | Raw | Internal |
| 1 | Radiometric corrections | Multi spectral registration Cartographic projection | Provided to scientists |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dick, A.; Raynaud, J.-L.; Rolland, A.; Pelou, S.; Coustance, S.; Dedieu, G.; Hagolle, O.; Burochin, J.-P.; Binet, R.; Moreau, A. VENμS: Mission Characteristics, Final Evaluation of the First Phase and Data Production. Remote Sens. 2022, 14, 3281. https://doi.org/10.3390/rs14143281
Dick A, Raynaud J-L, Rolland A, Pelou S, Coustance S, Dedieu G, Hagolle O, Burochin J-P, Binet R, Moreau A. VENμS: Mission Characteristics, Final Evaluation of the First Phase and Data Production. Remote Sensing. 2022; 14(14):3281. https://doi.org/10.3390/rs14143281
Chicago/Turabian StyleDick, Arthur, Jean-Louis Raynaud, Amandine Rolland, Sophie Pelou, Sophie Coustance, Gérard Dedieu, Olivier Hagolle, Jean-Pascal Burochin, Renaud Binet, and Agathe Moreau. 2022. "VENμS: Mission Characteristics, Final Evaluation of the First Phase and Data Production" Remote Sensing 14, no. 14: 3281. https://doi.org/10.3390/rs14143281