
LGB-PHY: An Evaporation Duct Height Prediction Model Based on Physically Constrained LightGBM Algorithm

Abstract
:1. Introduction
2. Brief Introduction of Existing Evaporation Duct Height Model
2.1. The Paulus–Jeske Model
2.2. The BYC Model
2.3. The XGB Model
3. LightGBM Evaporation Duct Height Prediction Model with Physical Information (LGB-PHY Model)
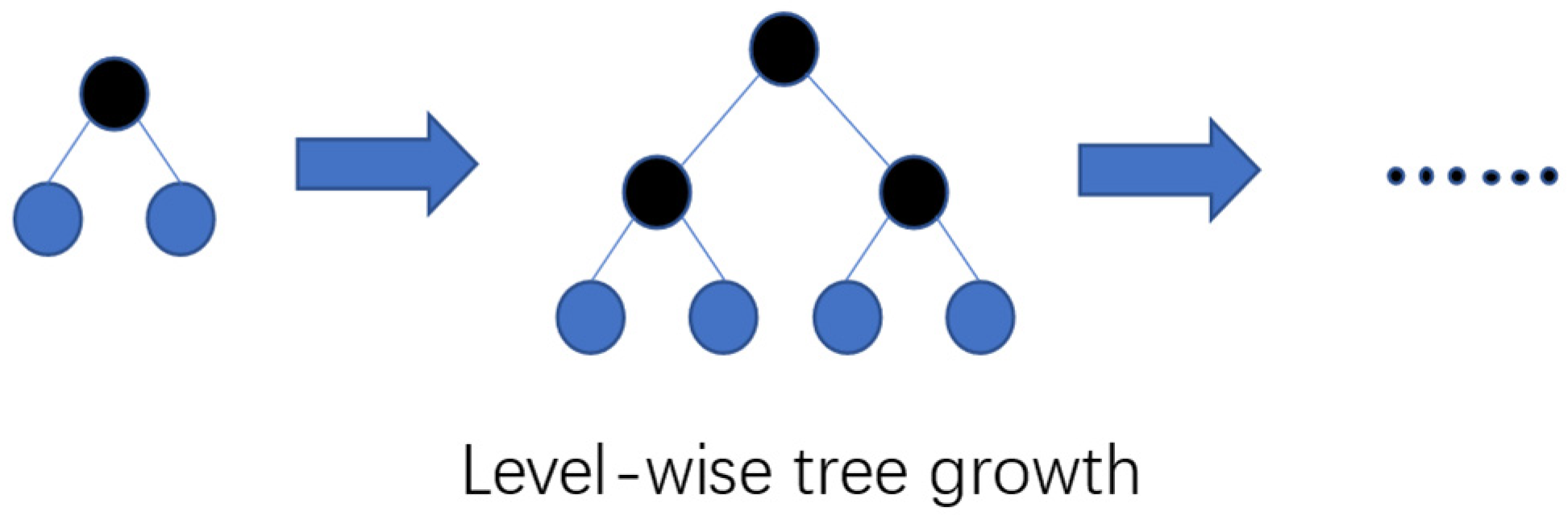
3.1. Introduction to the LightGBM Algorithm
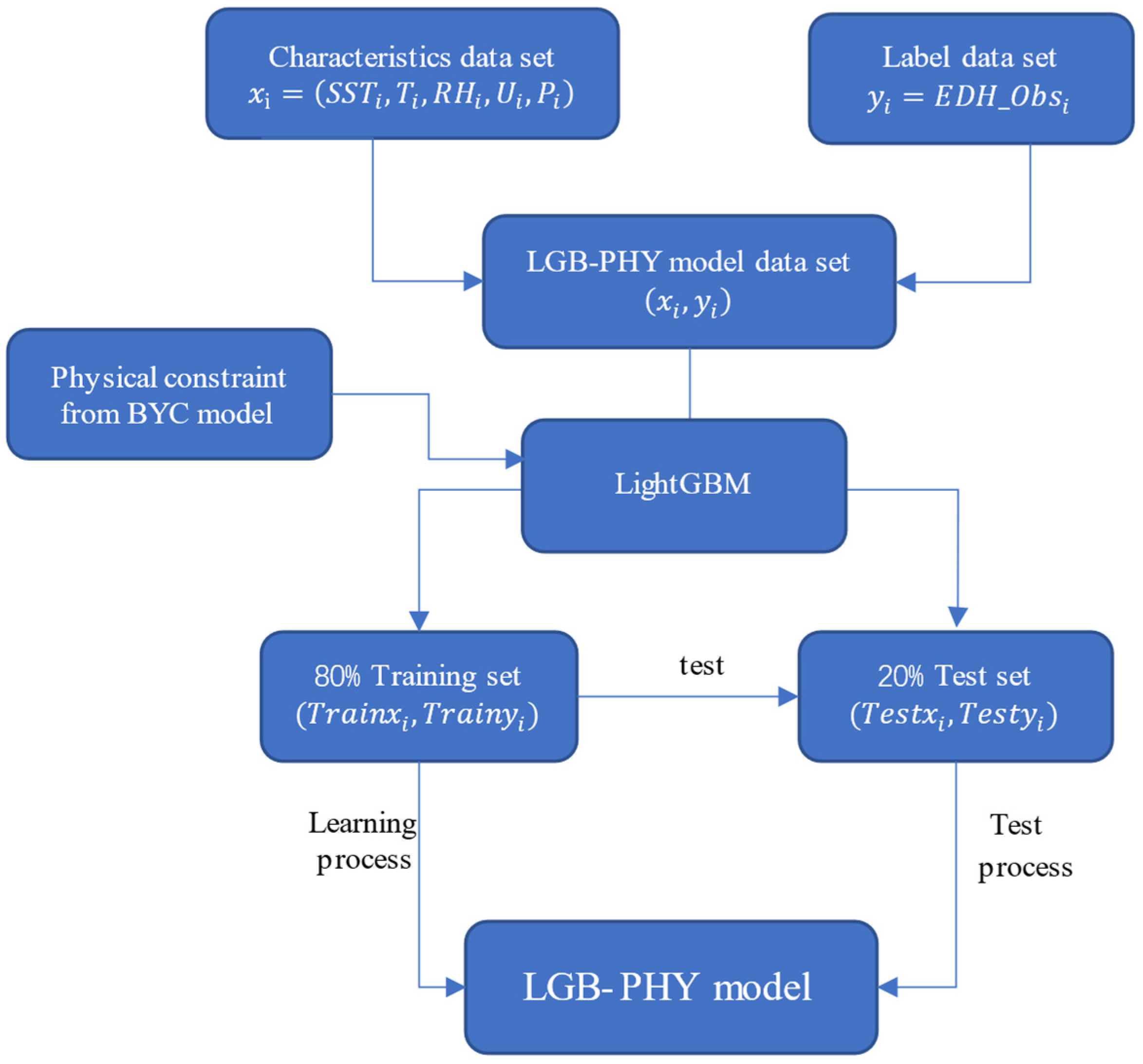
3.2. Construction of LGB-PHY Model
4. Experiment and Result Analysis
4.1. Experimental Scheme
4.2. Data Augmentation
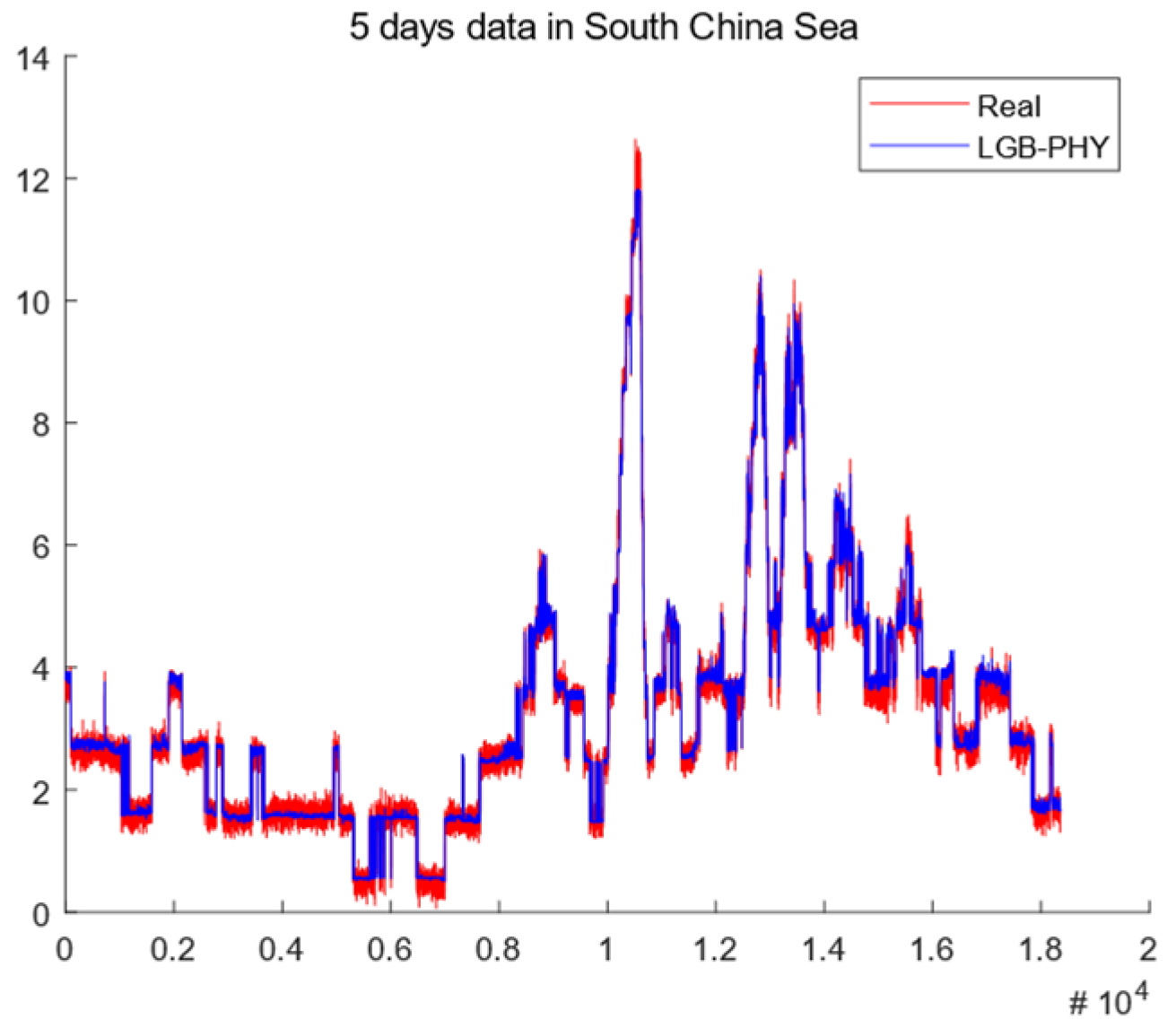
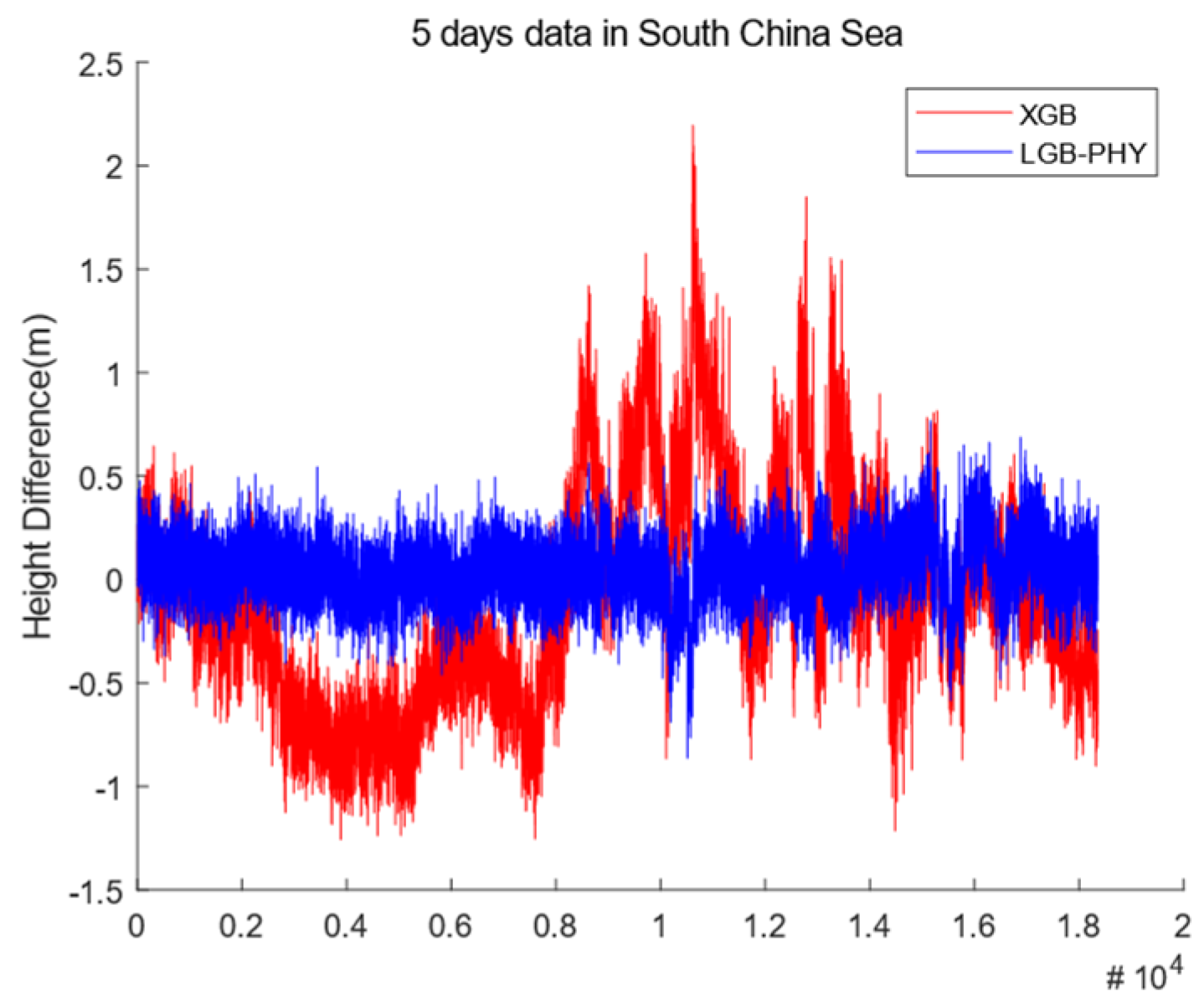
4.3. Evaluation of Model Prediction Effect
4.4. Model Area Generalization Ability Test
- (1)
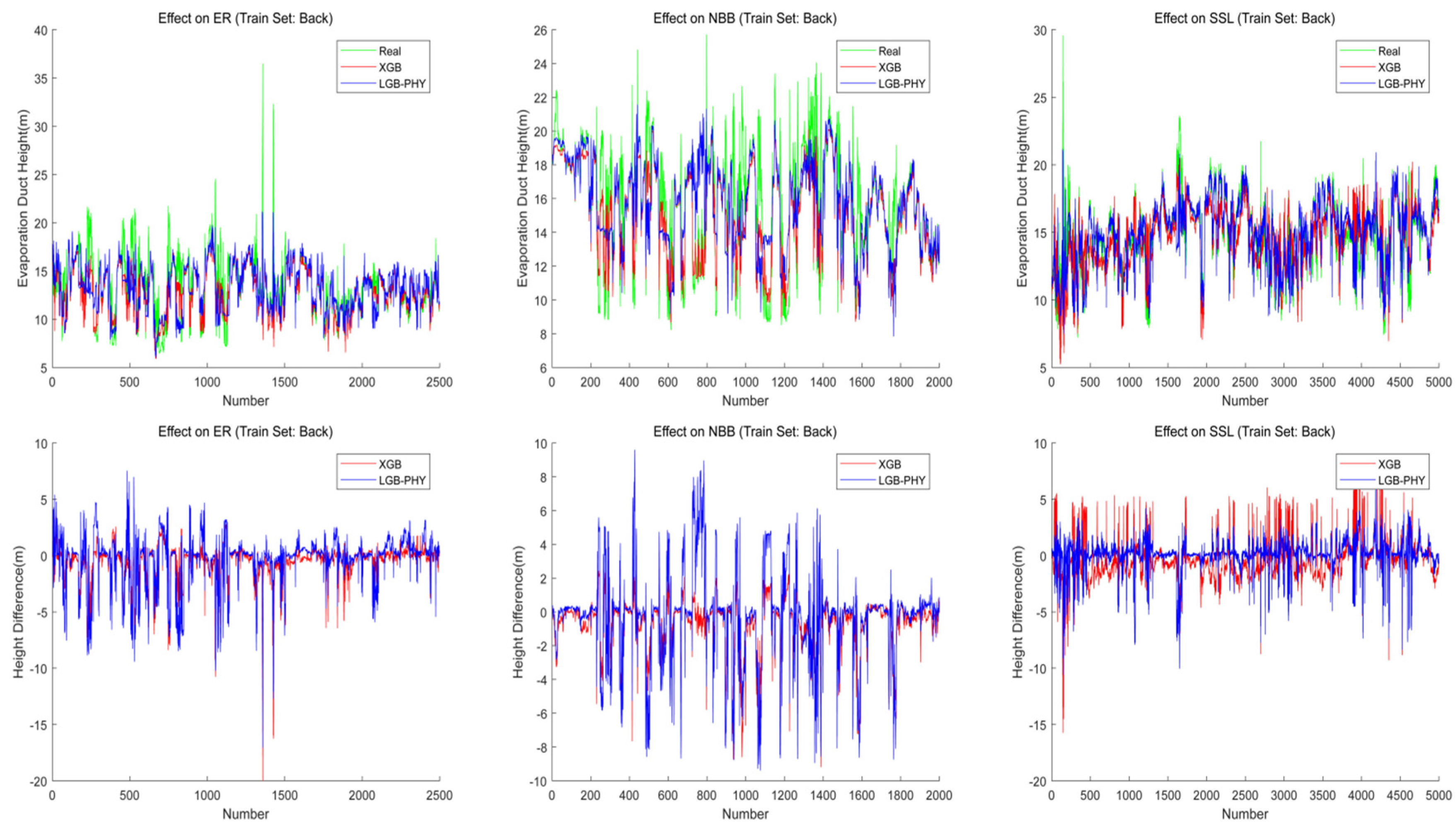
- In most cases, the RMSE of the predicted value of the LGB-PHY model is smaller than that of the XGB model, and the SCC of the predicted value of the LGB-PHY model is larger than that of the XGB model. Hence, the LGB-PHY model has better generalization performance in most cases.
- (2)
- In cases where the SSL data set is used as the training set, the RMSE of the LGB-PHY model is slightly larger than that of the XGB model where Back and ER are used as test sets, and SCC is slightly smaller than that of the XGB model. In cases where the Back data set is used as the training set, the RMSE of the LGB-PHY model is larger than that of the XGB model when NBB and ER are used as the test sets, and SCC is also smaller than that of the XGB model. According to the adaptability analysis of the BYC theoretical model, it can then be argued that the reason for the errors in some sea areas is that the LGB-PHY model, which combines the physical information of the BYC model, also inherits some of the properties of the BYC theoretical model. Note that there are empirical parameters from the actual observation in the BYC model (i.e., the data of the extracted empirical parameters come from the meteorological and hydrological data observed by the U.S. Navy in the middle and high latitudes) which are significantly different from the air and sea environments in the low latitudes around the equator. It is difficult for the BYC model to achieve good results in the waters near the equator, which leads to the error in some areas of the LGB-PHY model as it combines the physical information of the BYC model.
5. Conclusions
- (1)
- In the South China Sea, the LGB-PHY model has higher fitting accuracy than the XGB model. The experiments performed that the LGB-PHY model has higher performance in terms of RMSE and SCC than that of the XGBM model, where the RMSE index decreases by 68% and the SCC index increases by 6.5%.
- (2)
- In the cross-comparison experiment of regional generalization, the LGB-PHY model shows better generalization ability than that of the XGB model in most cases. Nevertheless, for the case with the Back data set as the training set and the NBB data set being used as the test set, the LGB-PHY model demonstrates lower. It is attributed to the fact that some empirical parameters in the BYC model are derived from actual observation. However, the observation site is situated where the empirical parameters are mostly located in the sea area of the middle and high latitudes, which are quite different from the atmosphere and sea environment of the low latitudes around the equator. Affected by the poor universality of the physical experience parameters, the BYC model has difficulty achieving good results in the waters near the equator and at low latitudes. This results in lower accuracy of the LGB-PHY model, which combines the physical information of the BYC model. In general, our experiments confirm that in the middle and high latitudes, where the BYC model has strong adaptability, the LGB-PHY model has a stronger regional generalization performance.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kang, S.F.; Zhang, Y.S. Atmospheric Duct in Troposphere Environment; Wang, Z., Ed.; Science Press: Beijing, China, 2014. [Google Scholar]
- Paulus, R.A. Practical Application of an Evaporation Duct Model. Radio Sci. 1985, 20, 887–896. [Google Scholar] [CrossRef]
- Jeske, H. State and Limits of Prediction Methods of Radar Wave Propagation Conditions Over Sea. Modern Radio Wave Propagation and Air-Sea interaction. 1973, 5, 130–148. [Google Scholar]
- Xie, L.X.; Tian, B. Study on Evaporation Duct RSHMU Model in Tropical Waters. Ship Electron. Eng. 2015, 35, 88–90, 100. [Google Scholar]
- Luc, M.G.; Sylvie, G.; Eric, B. A Simple Method to Determine Evaporation Duct Height in the Sea Surface Boundary Layer. Radio Sci. 1992, 27, 635–644. [Google Scholar]
- Steven, M.B.; George, S.Y.; James, A.C. A New Model of the Oceanic Evaporation Duct. J. Appl. Meteorol. 1997, 36, 193–204. [Google Scholar]
- Frederickson, P.A. Estimating the Refractive Index Structure Parameter (C2) over the Ocean Using Bulk Methods. J. Appl. Meteorol. 2000, 39, 10. [Google Scholar]
- Liu, C.G.; Huang, J.Y. Modeling Evaporation Duct over Sea with Pseudo-Refractivity and Similarity Theory. Acta Electron. Sin. 2001, 29, 970–972. [Google Scholar]
- Dai, F.S.; Li, Q. Atmospheric Duct and Its Military Applications; People’s Liberation Army Publishing House: Beijing, China, 2002. [Google Scholar]
- Ding, J.L.; Fei, J.F. Development and validation of an evaporation duct model. part i: Model establishment and sensitivity experiments. J. Meteorol. Res. 2015, 29, 467–481. [Google Scholar] [CrossRef]
- Song, W.; Tian, B. Research on evaporation duct predicting model. J. Huazhong Univ. Sci. Technol. 2013, 41, 52–56. [Google Scholar]
- Gerstoft, P.; Rogers, L.T. Inversion for refractivity parameters from radar sea clutter. Radio Sci. 2003, 38, 1–22. [Google Scholar] [CrossRef]
- Yardim, C.; Gerstoft, P. Sensitivity analysis and performance estimation of refractivity from clutter techniques. Radio Sci. 2009, 44, 1008. [Google Scholar] [CrossRef]
- Tian, S.S.; Cai, H. Erected antenna height of radars for searching over sea under evaporation duct. J. Huazhong Univ. Sci. Technol. 2010, 38, 16–19. [Google Scholar]
- Zhang, J.P.; Wu, Z.S. Evaporation duct inversion based on radar sea clutters from different antenna heights. Chin. J. Radio Sci. 2011, 26, 422–430. [Google Scholar]
- Zhao, X.; Huang, S. Atmospheric Duct Estimation Using Radar Sea Clutter Returns by the Adjoint Method with Regularization Technique. J. Atmos. Ocean. Technol. 2014, 31, 1250–1262. [Google Scholar] [CrossRef]
- Wang, H.G.; Wu, Z.S. Retrieving evaporation duct heights from power of ground-based GPS occultation Signal. Prog. Electromagn. Res. 2013, 30, 189–194. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.R.; Michalski, R.S.; Mitchell, T.M. Machine learning. An Artificial Intelligence Approach; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1983; Volume 2. [Google Scholar]
- Isaakids, S.; Dimou, I.; Xenos, T. An artificial neural network predictor for tropospheric surface duct phenomena. Nonlinear Processes Geophys. 2007, 14, 569–573. [Google Scholar] [CrossRef]
- Douvenot, R.; Fabbro, V.; Bourlier, C. Radar coverage prediction over ocean: Duct mapping using least squares support vector machines. In Proceedings of the 1st European Conference on Antennas and Propagation, Nice, France, 1 June 2006. [Google Scholar]
- Yang, C. A comparison of the machine learning algorithm for evaporation duct Estimation. Radioengineering 2013, 22, 657–661. [Google Scholar]
- Zhu, X.Y.; Li, J.C. An Evaporation Duct Height Prediction Method Based on Deep Learning. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1307–1311. [Google Scholar] [CrossRef]
- Zhu, X.Y.; Zhu, M. An Optimization Research of Evaporation Duct Prediction Models Based on a Deep Learning Method. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference, Xi’an, China, 25–27 May 2018. [Google Scholar]
- Allan, P. Approximation theory of the MLP model in neural networks. Acta Numer. 1999, 8, 143–195. [Google Scholar]
- Zhao, W.P.; Li, J.C. Research on Evaporation Duct Height Prediction Based on Back Propagation Neural Network. IET Microw. Antennas Propag. Inst. Eng. Technol. 2020, 14, 1547–1554. [Google Scholar] [CrossRef]
- Zhao, W.P.; Li, J.C. PDD_GBR: Research on Evaporation Duct Height Prediction Based on Gradient Boosting Regression Algorithm. Radio Sci. 2019, 54, 949–962. [Google Scholar] [CrossRef]
- Zhao, W.P.; Li, J. XGB Model: Research on Evaporation Duct Height Prediction Based on XGBoost Algorithm. Radioengineering 2020, 29, 81–93. [Google Scholar] [CrossRef]
- Anghel, A.; Papandreou, N. Benchmarking and Optimization of Gradient Boosted Decision Tree Algorithms. Statistics 2018, 2, 1467–1531. [Google Scholar]
- Jie, H.; Jia, J.W. Evaporation Duct Height Nowcasting in China’s Yellow Sea Based on Deep Learning. Remote Sens. 2021, 13, 1577. [Google Scholar]
- Steven, M.B. LKB-based evaporation duct model comparison with buoy data. J. Appl. Meteorol. 2002, 41, 434–446. [Google Scholar]
- Liu, W.T.; Blanc, T.V. The Liu, Katsaros, and Businger (1979) Bulk Atmospheric Flux Computational Iteration Program in FOR-Tran and Basic; Naval Research Lab: Washington, DC, USA, 1984. [Google Scholar]
- Cook, J.A. A sensitivity study of weather data inaccuracies on evaporation duct height algorithms. Radio Sci. 2016, 26, 731–746. [Google Scholar] [CrossRef]
- Breiman, L. Stacked Regressions. Mach. Learn. 1996, 24, 49–64. [Google Scholar] [CrossRef] [Green Version]
- Mitchell, T. Machine Learning and Data Mining. Commun. ACM 1999, 42, 30–36. [Google Scholar] [CrossRef]
- Jerome, H.F. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1187–1232. [Google Scholar]
- Chen, T.; Carlos, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the KDD ’16: The 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016. [Google Scholar]
- Shi, H. Best-First Decision Tree Learning; University of Waikato: Hamilton, New Zealand, 2007. [Google Scholar]
- Meng, Q. LightGBM: A Highly Efficient Gradient Boosting Decision Tree. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Paulson, A.C. The Mathematical Representation of Wind Speed and Temperature Profiles in the Unstable Atmospheric Surface Layer. J. Appl. Meteorol. 1970, 9, 857–861. [Google Scholar] [CrossRef]
- Hilarie, S.; Christopher, J. Gaussian Process Regression for Estimating EM Ducting Within the Marine Atmospheric Boundary Layer. Radio Sci. 2020, 55, 1–14. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Advantages | Disadvantages |
|---|---|---|
| Laser radar inversion | Continuous and immediate security | The technology is not yet mature, and the scheme still needs to be improved. |
| Radar sea clutter inversion | The ability of regional generalization is strong, and the estimation effect is better by using suitable inversion algorithm | Due to the limitation of radiation silence, it is impossible to continuously monitor and diagnose, and it cannot realize large-scale duct monitoring. |
| GNSS occultation signal inversion | High accuracy under ideal conditions | There is a great error at a specific angle, which needs to be improved. |
| Sensor Category | Range | Precision | Resolution |
|---|---|---|---|
| Air temperature sensor | −40~+70 °C | ±0.3 °C | 0.1 °C |
| Relative humidity sensor | 0~100% | ±2% | 1% |
| Pressure sensor | 300~1100 hPa | ±0.5 hPa | 0.1 hPa |
| Wind speed sensor | 0.1~60 m/s | ±3% | 0.01 m/s |
| Sea surface temperature sensor | −55 °C~+80 °C | ±0.2 °C | 0.1 °C |
| RMSE | SCC | |
|---|---|---|
| LGB-PHY | 0.166 | 0.993 |
| XGB | 0.512 | 0.932 |
| Train Area | SSL | NBB | Back | ER | |
|---|---|---|---|---|---|
| LGB-PHY (RMSE) | SSL | - | 2.41 | 1.30 | 1.40 |
| NBB | 1.49 | - | 0.89 | 1.18 | |
| Back | 1.47 | 2.75 | - | 2.39 | |
| ER | 1.03 | 1.04 | 1.17 | - |
| Train Area | SSL | NBB | Back | ER | |
|---|---|---|---|---|---|
| XGB (RMSE) | SSL | - | 2.46 | 1.04 | 1.20 |
| NBB | 1.95 | - | 0.92 | 1.48 | |
| Back | 1.84 | 1.91 | - | 1.90 | |
| ER | 1.44 | 1.07 | 1.35 | - |
| Train Area | SSL | NBB | Back | ER | |
|---|---|---|---|---|---|
| LGB-PHY (SCC) | SSL | - | 0.47 | 0.82 | 0.77 |
| NBB | 0.65 | - | 0.92 | 0.84 | |
| Back | 0.66 | 0.31 | - | 0.34 | |
| ER | 0.83 | 0.90 | 0.86 | - |
| Train Area | SSL | NBB | Back | ER | |
|---|---|---|---|---|---|
| XGB (SCC) | SSL | - | 0.44 | 0.88 | 0.83 |
| NBB | 0.39 | - | 0.91 | 0.75 | |
| Back | 0.46 | 0.66 | - | 0.58 | |
| ER | 0.67 | 0.89 | 0.81 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chai, X.; Li, J.; Zhao, J.; Wang, W.; Zhao, X. LGB-PHY: An Evaporation Duct Height Prediction Model Based on Physically Constrained LightGBM Algorithm. Remote Sens. 2022, 14, 3448. https://doi.org/10.3390/rs14143448
Chai X, Li J, Zhao J, Wang W, Zhao X. LGB-PHY: An Evaporation Duct Height Prediction Model Based on Physically Constrained LightGBM Algorithm. Remote Sensing. 2022; 14(14):3448. https://doi.org/10.3390/rs14143448
Chicago/Turabian StyleChai, Xingyu, Jincai Li, Jun Zhao, Wuxin Wang, and Xiaofeng Zhao. 2022. "LGB-PHY: An Evaporation Duct Height Prediction Model Based on Physically Constrained LightGBM Algorithm" Remote Sensing 14, no. 14: 3448. https://doi.org/10.3390/rs14143448
APA StyleChai, X., Li, J., Zhao, J., Wang, W., & Zhao, X. (2022). LGB-PHY: An Evaporation Duct Height Prediction Model Based on Physically Constrained LightGBM Algorithm. Remote Sensing, 14(14), 3448. https://doi.org/10.3390/rs14143448