
Performance Analysis of BDS-3 SAIM and Enhancement Research on Autonomous Satellite Ephemeris Monitoring


 ,
,
Abstract
:
1. Introduction
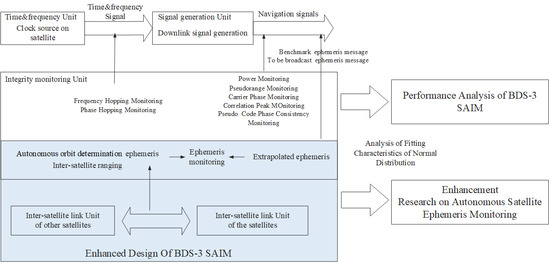
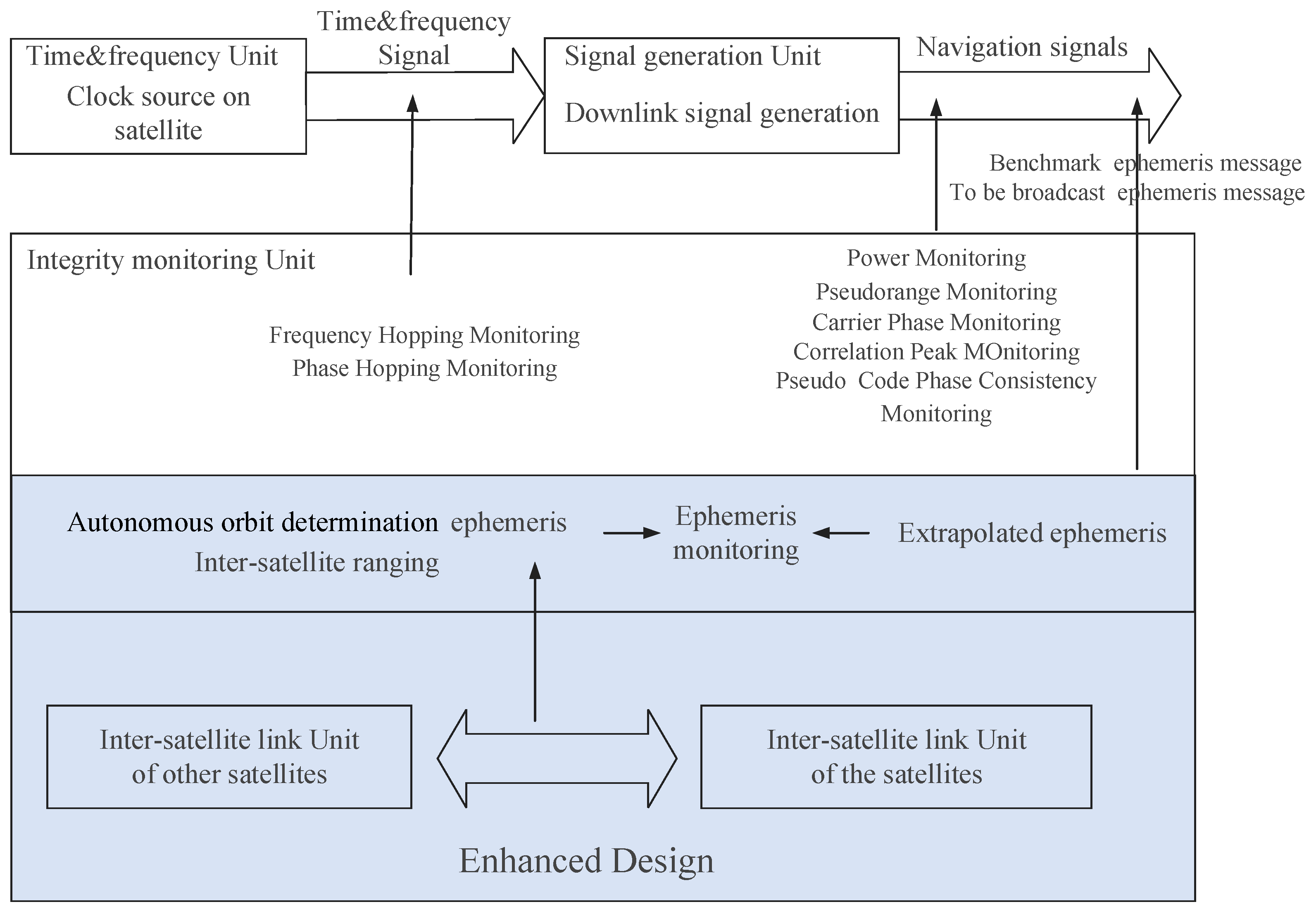
2. BDS-3 SAIM Monitoring Method
2.1. Current Monitoring Methods
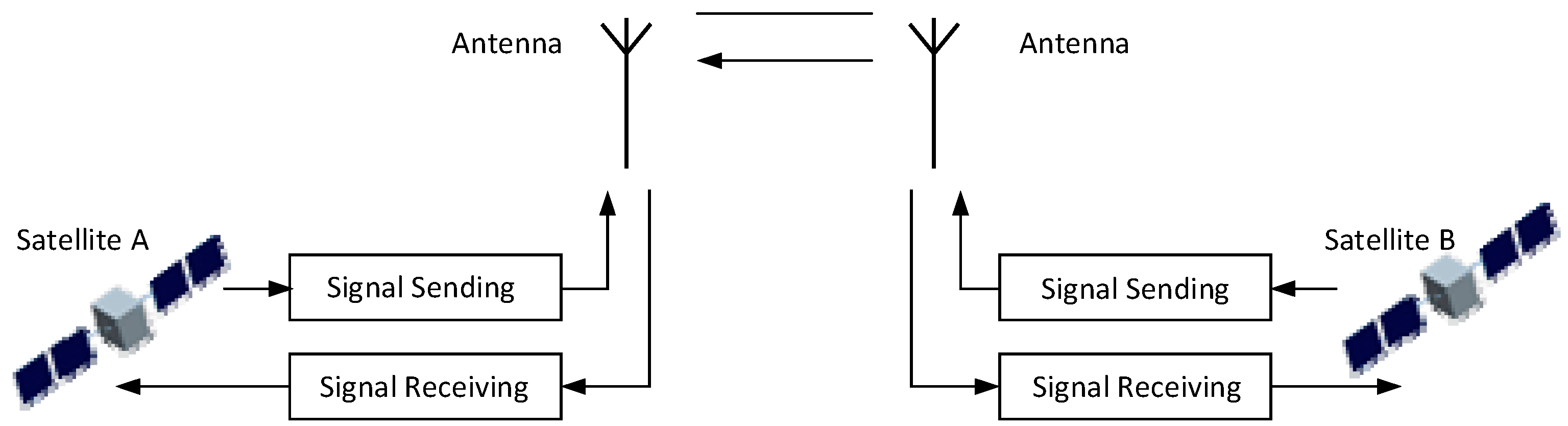
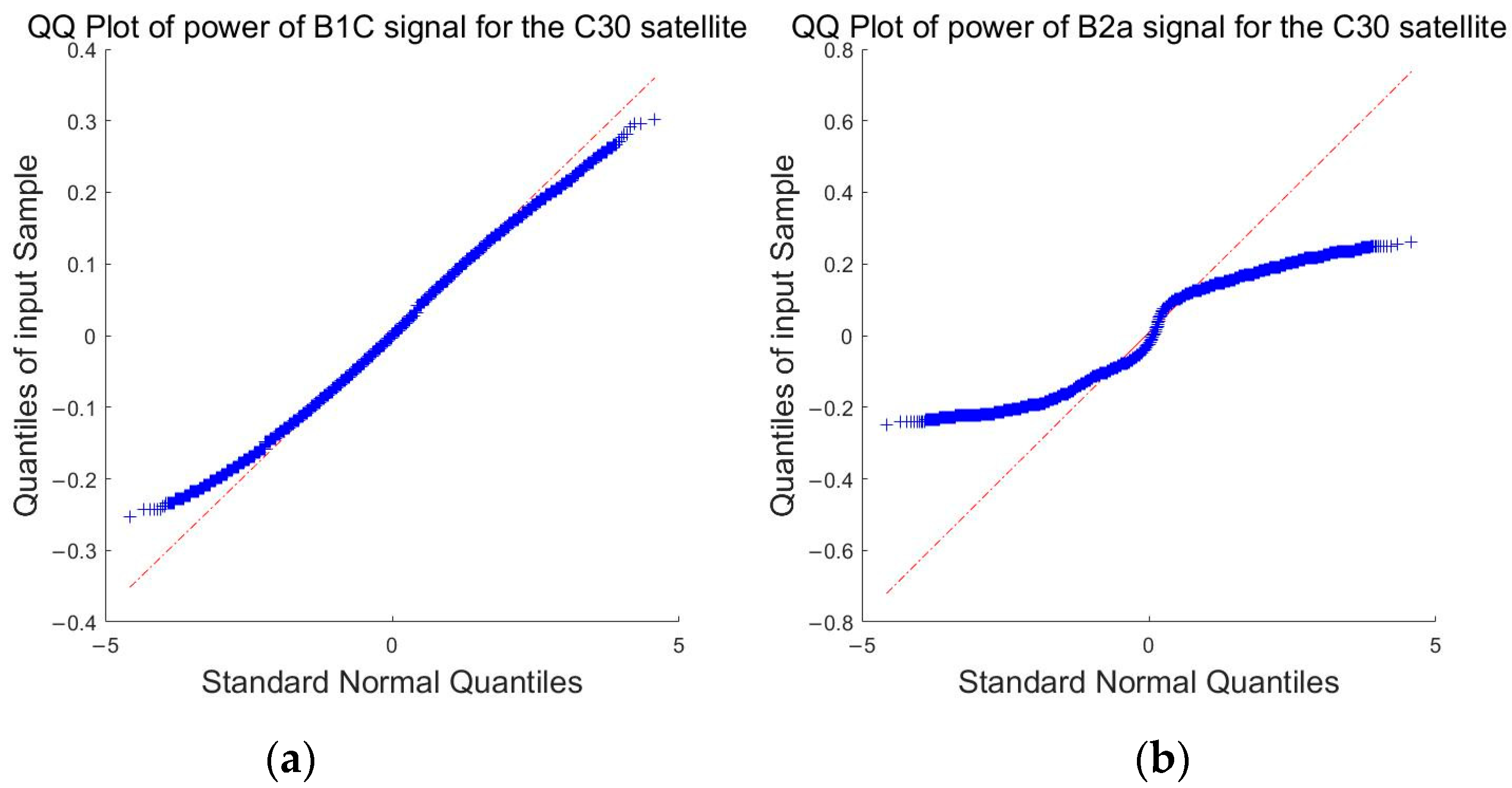
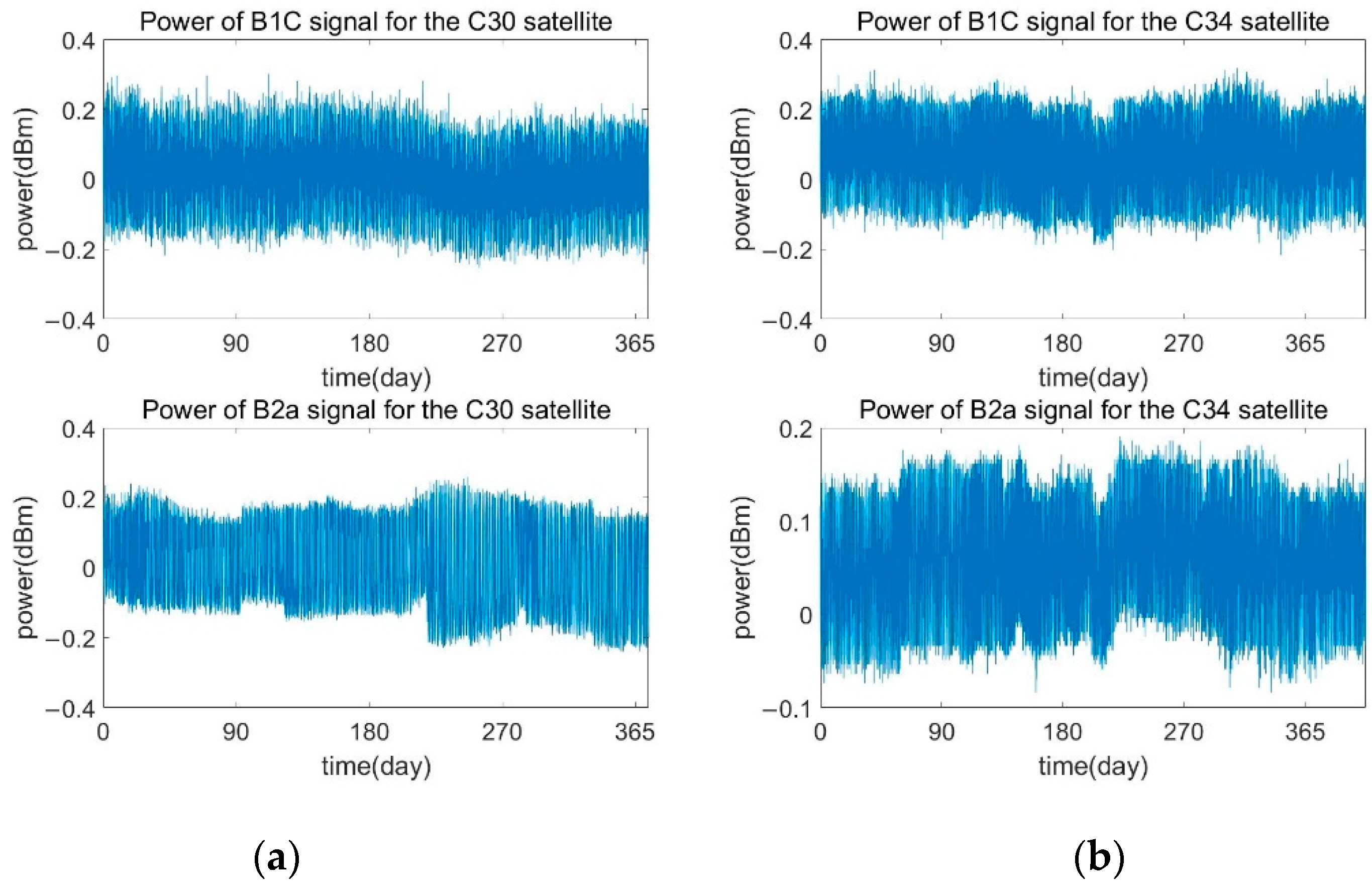
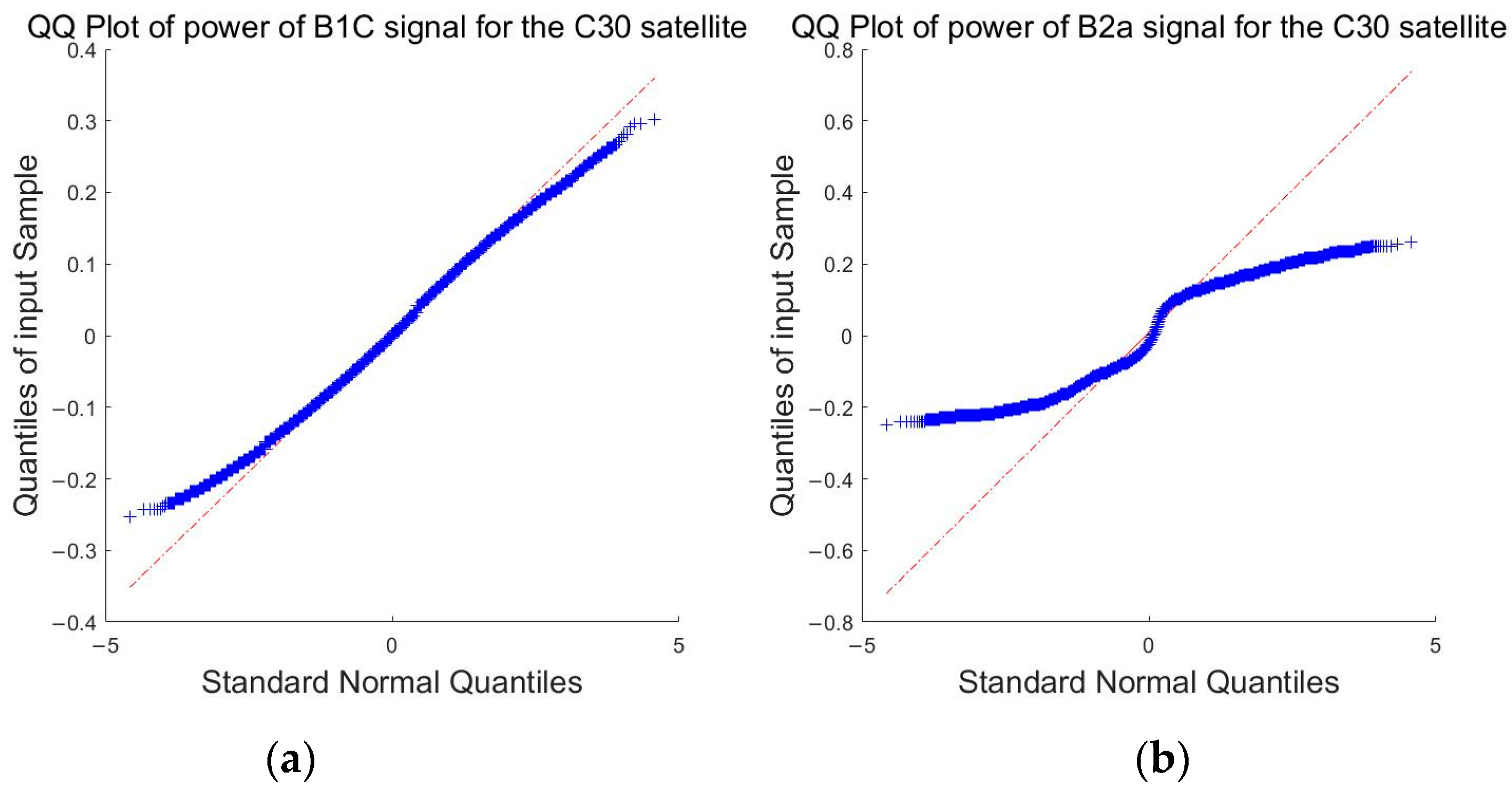
2.1.1. Signal Power Monitoring
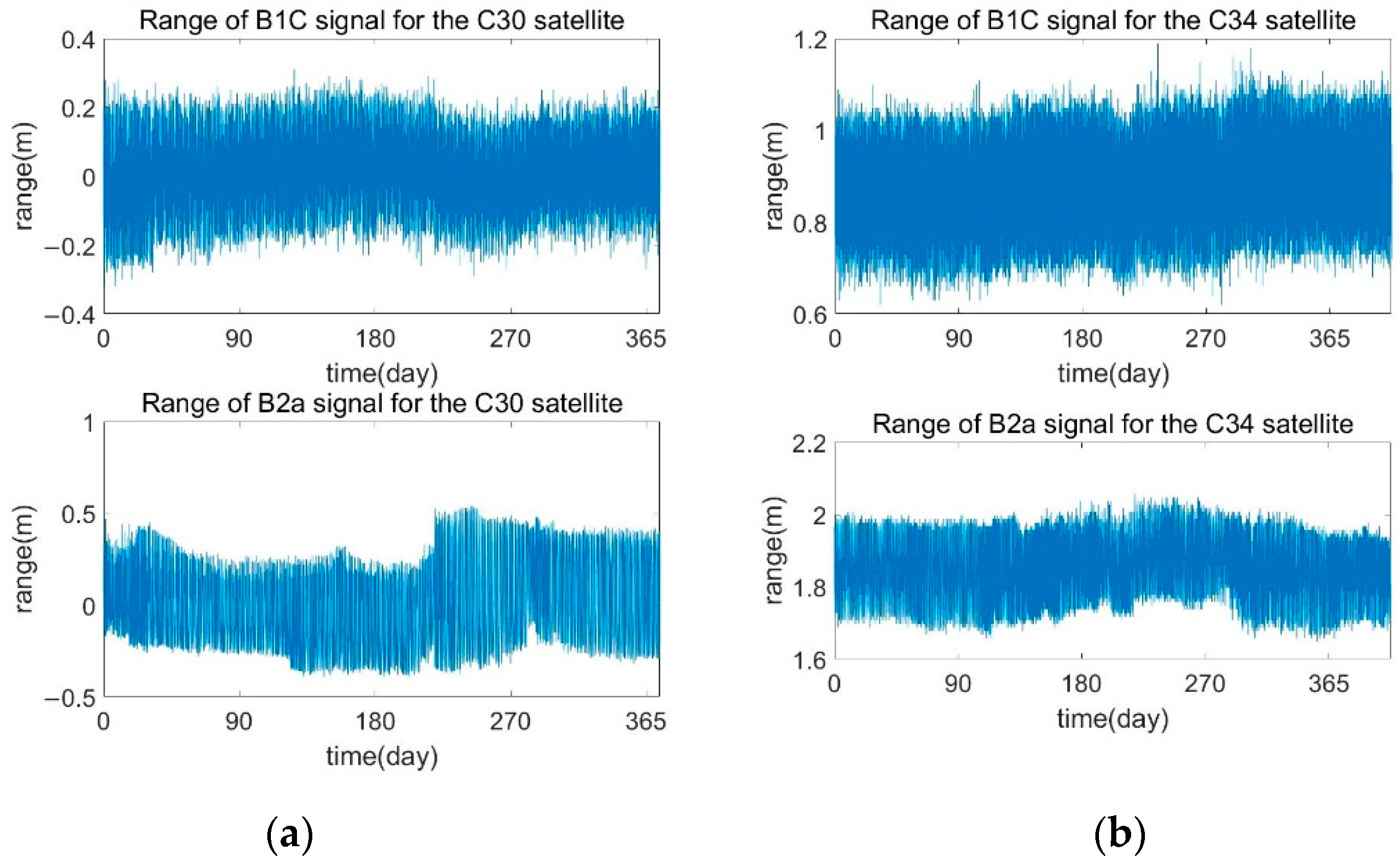
2.1.2. Pseudo-Range Monitoring
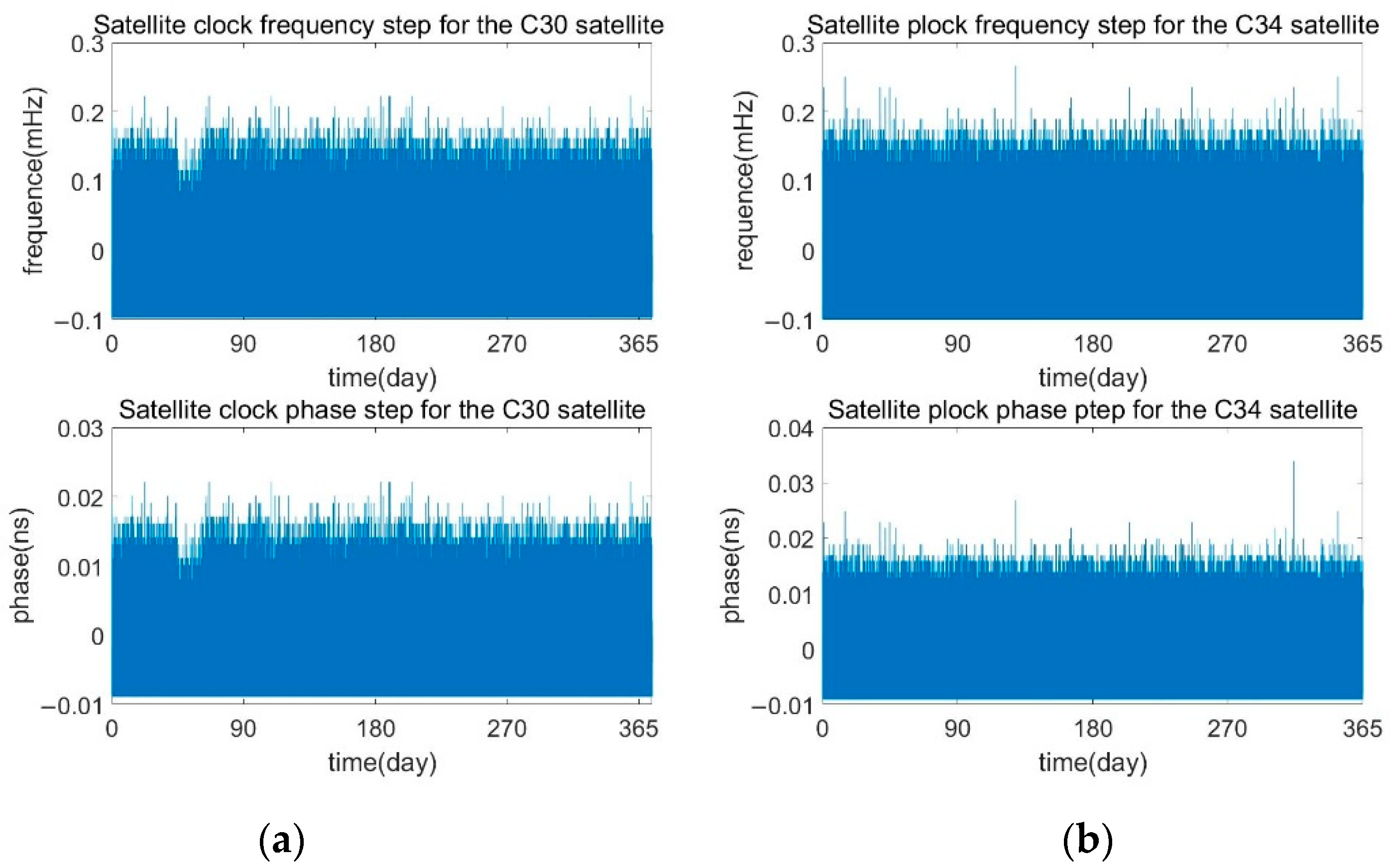
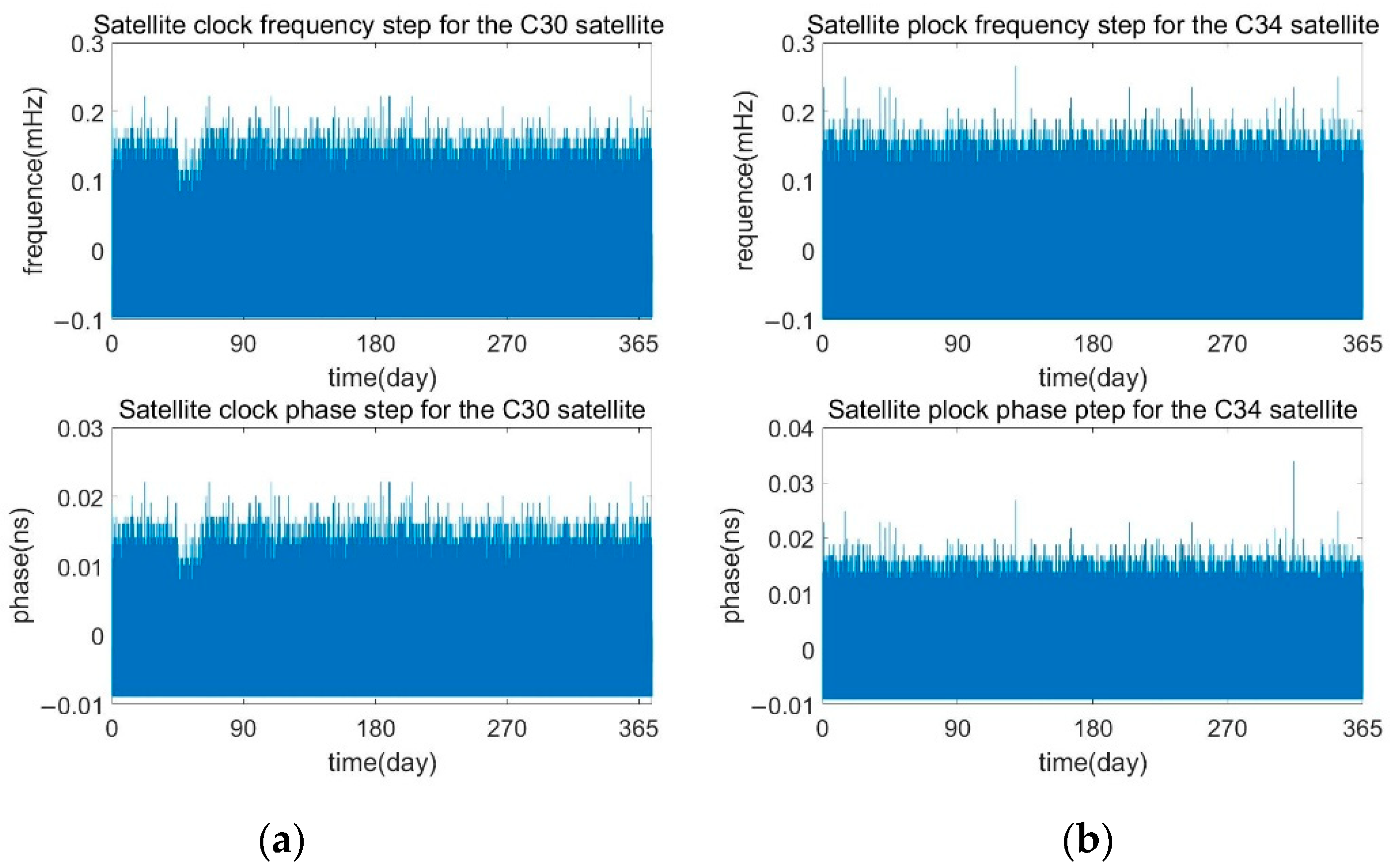
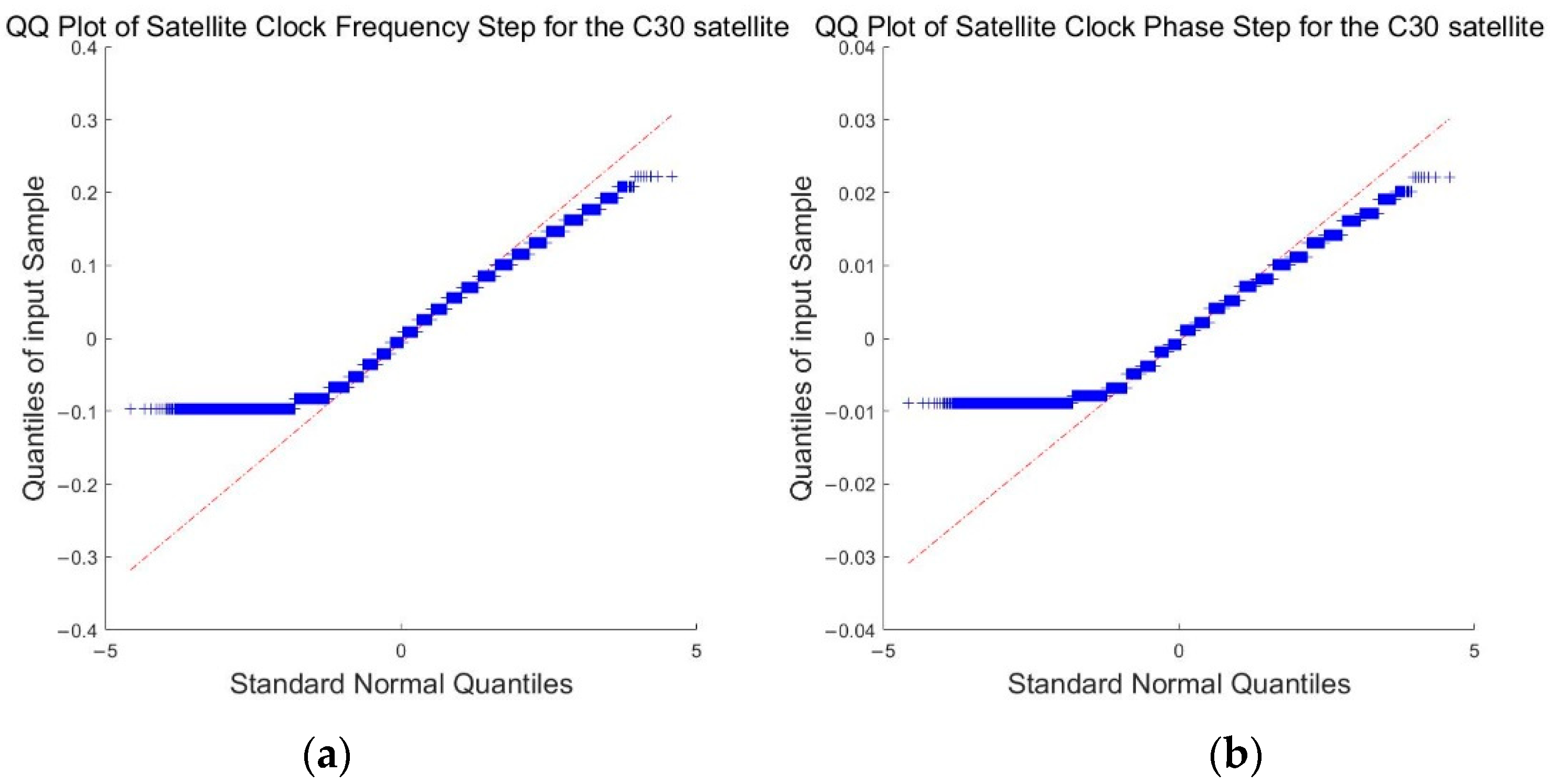
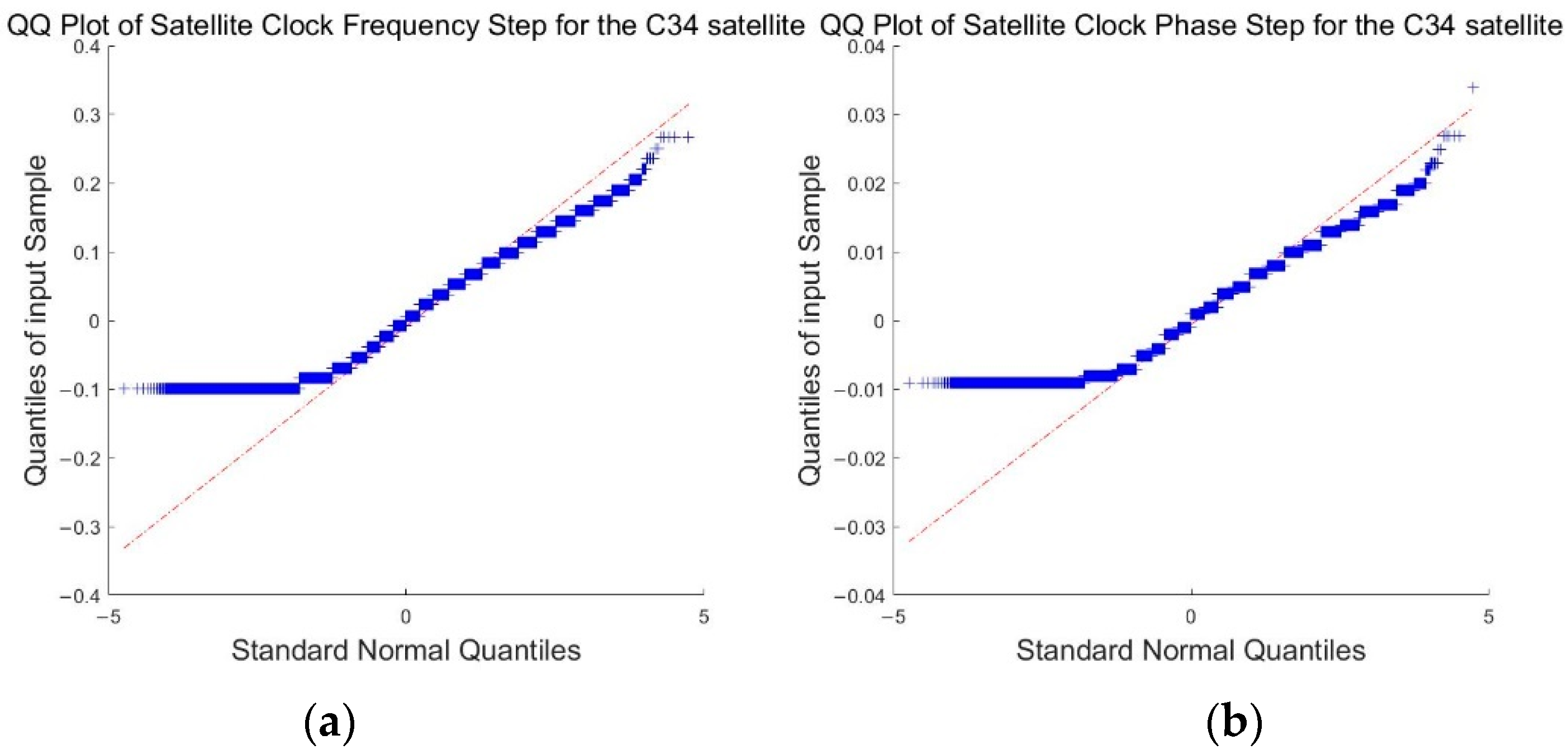
2.1.3. Satellite Clock Frequency and Phase Hopping Monitoring
2.2. Enhanced Ephemeris Monitoring Methods
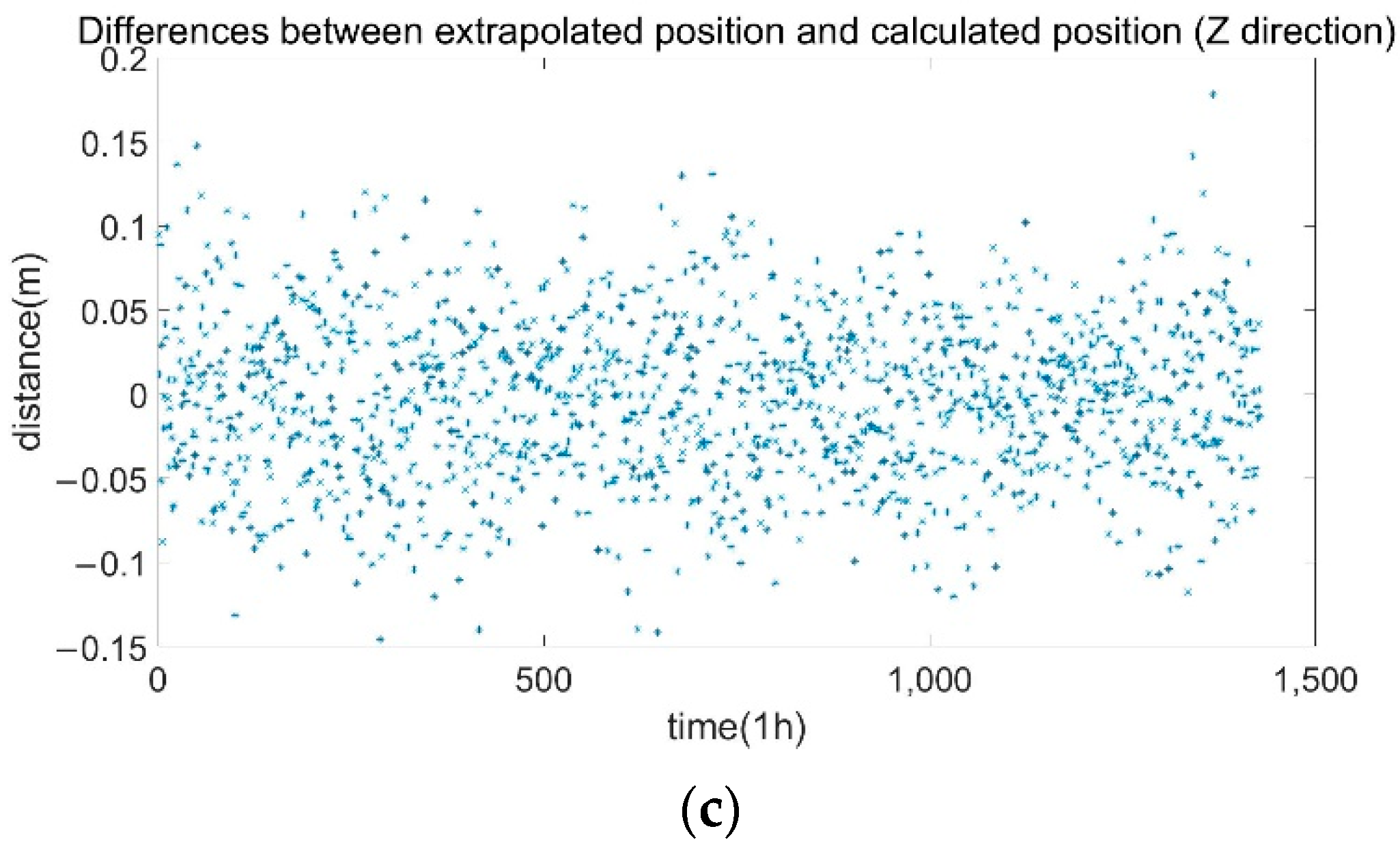
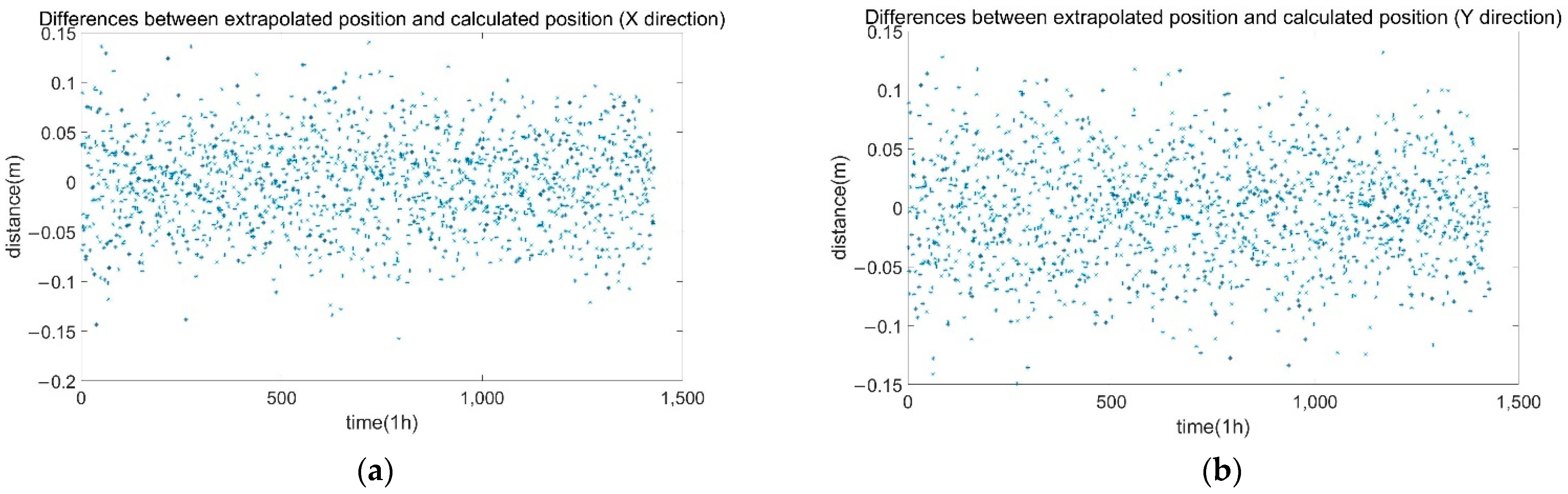
2.2.1. Extrapolated Ephemeris
2.2.2. Autonomous Orbit Determination Ephemeris
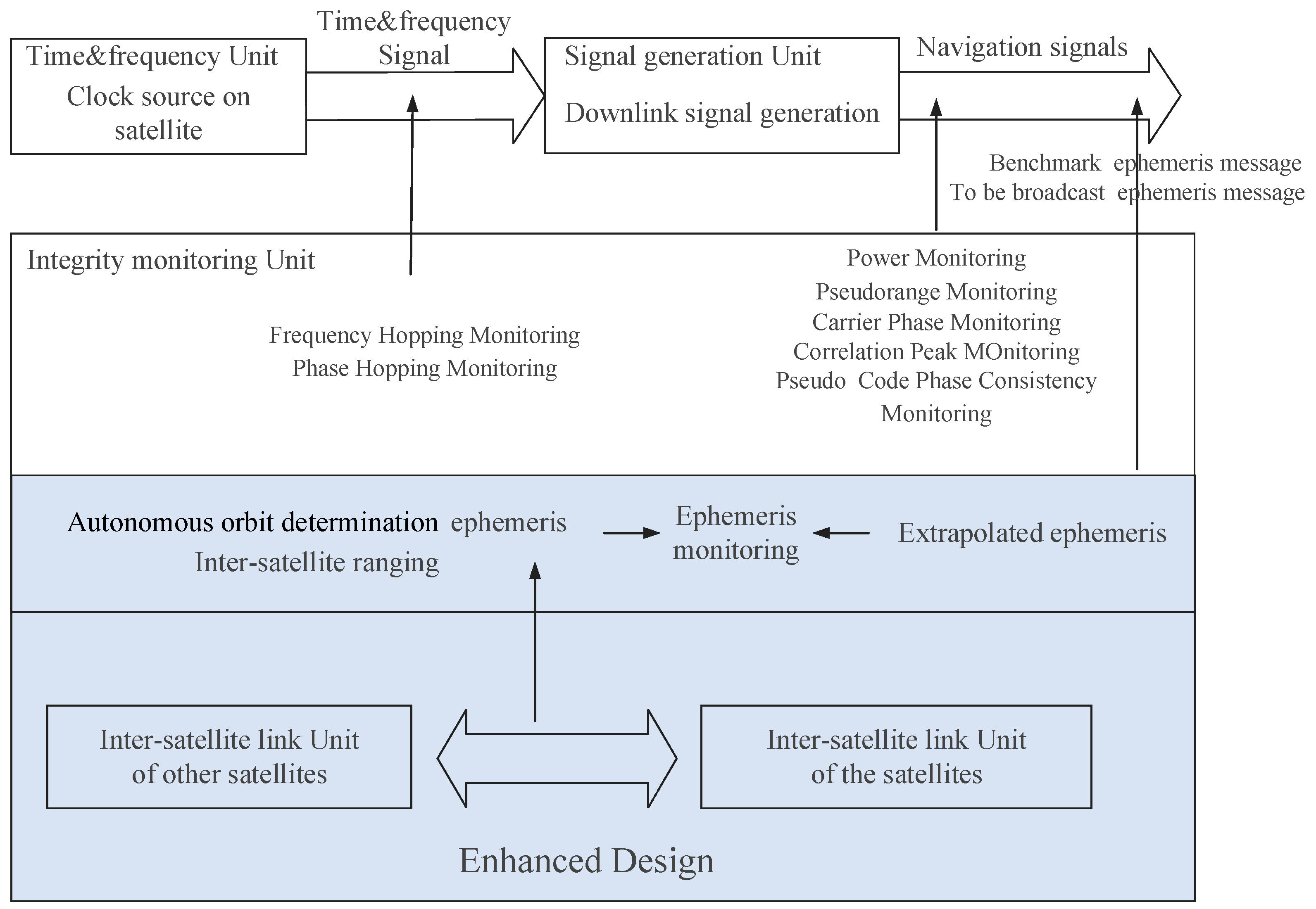
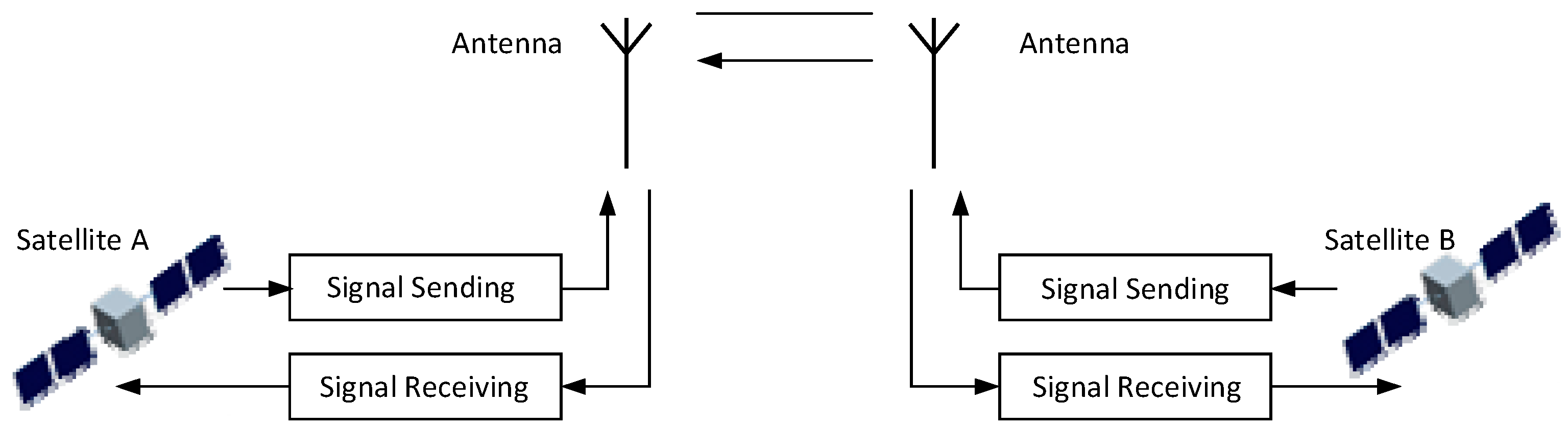
2.2.3. Inter-Satellite Ranging
3. Results and Discussion
3.1. Performance of BDS-3 SAIM Based on On-Orbit Data
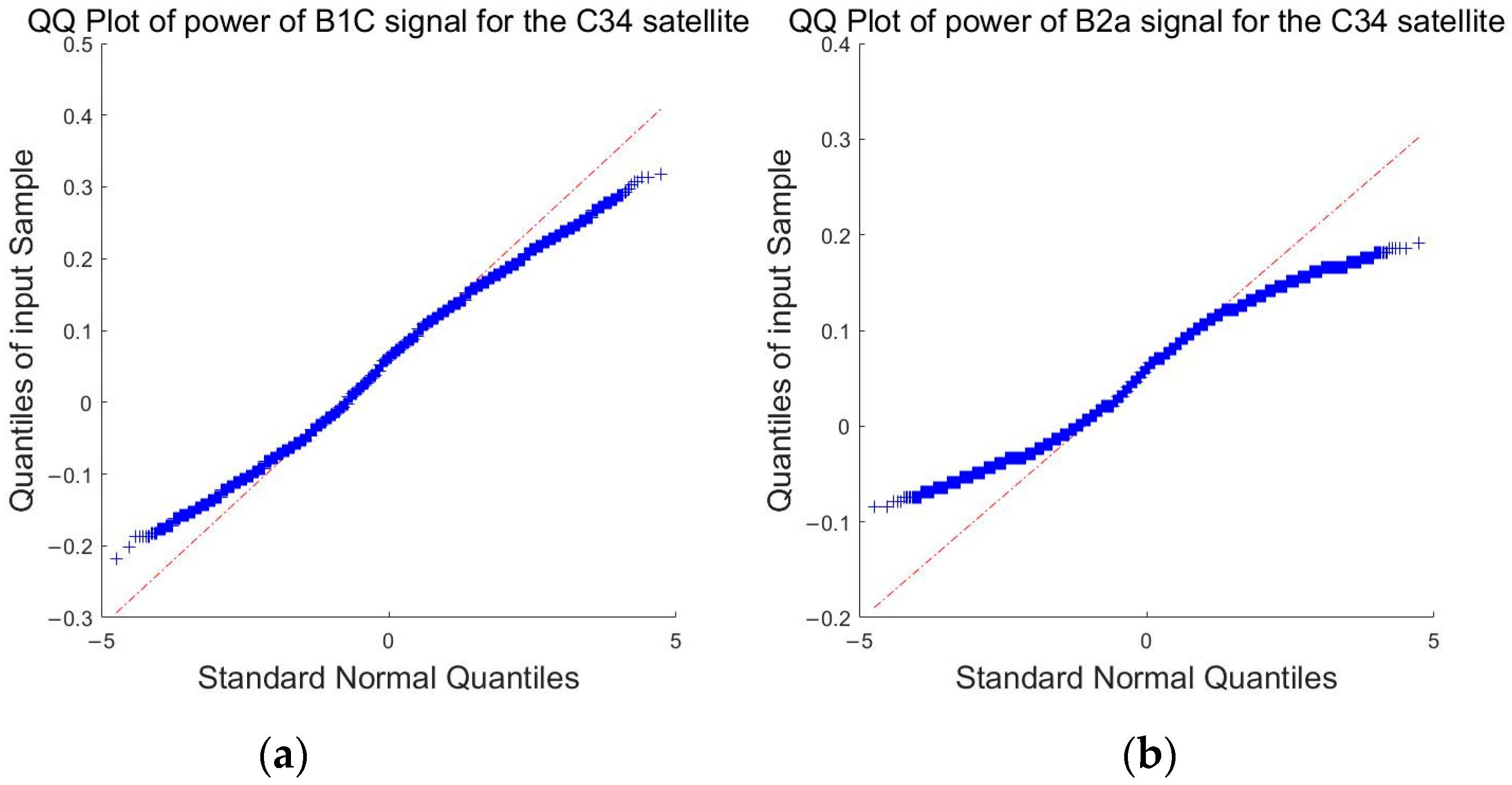
3.1.1. Signal Power Monitoring
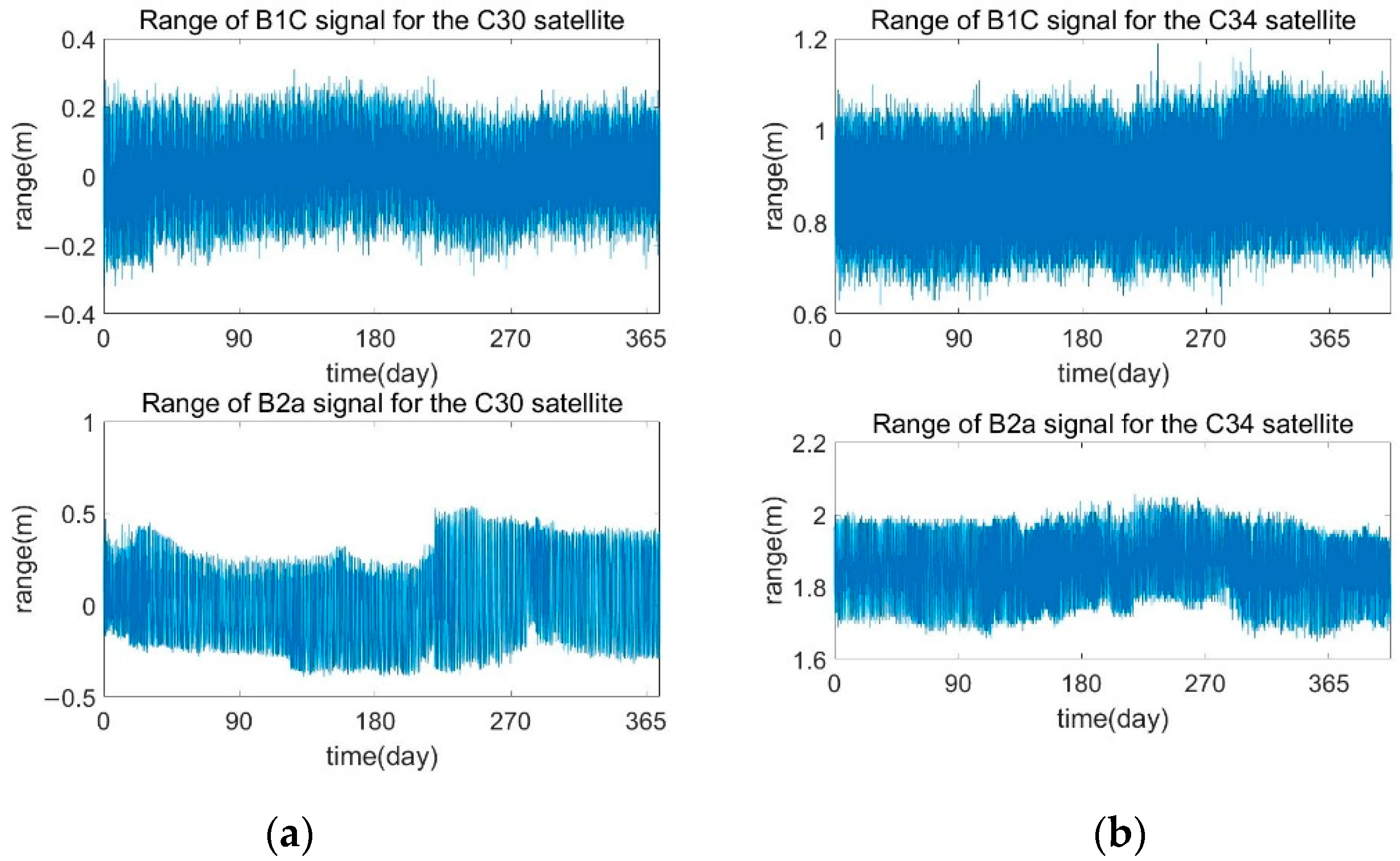
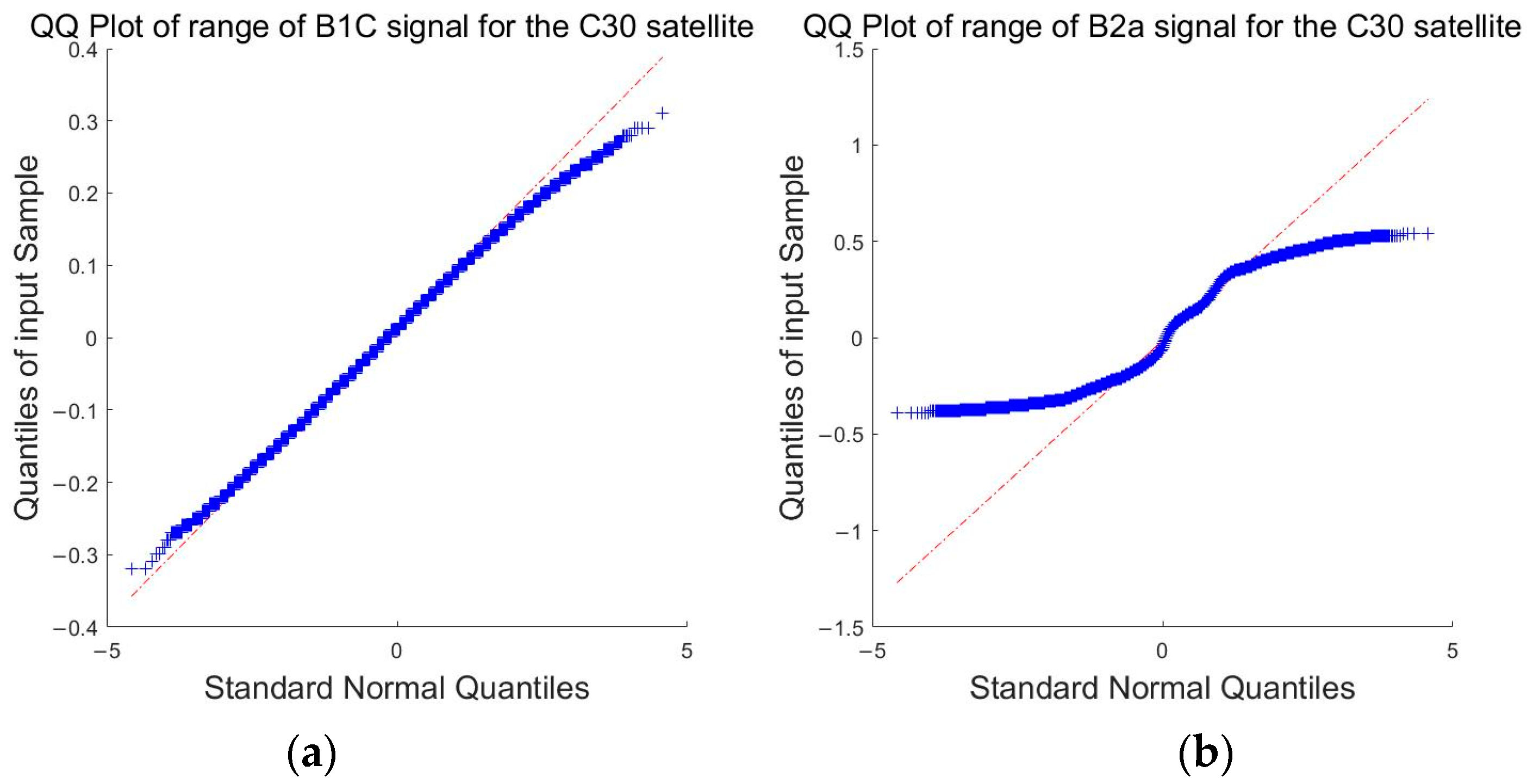
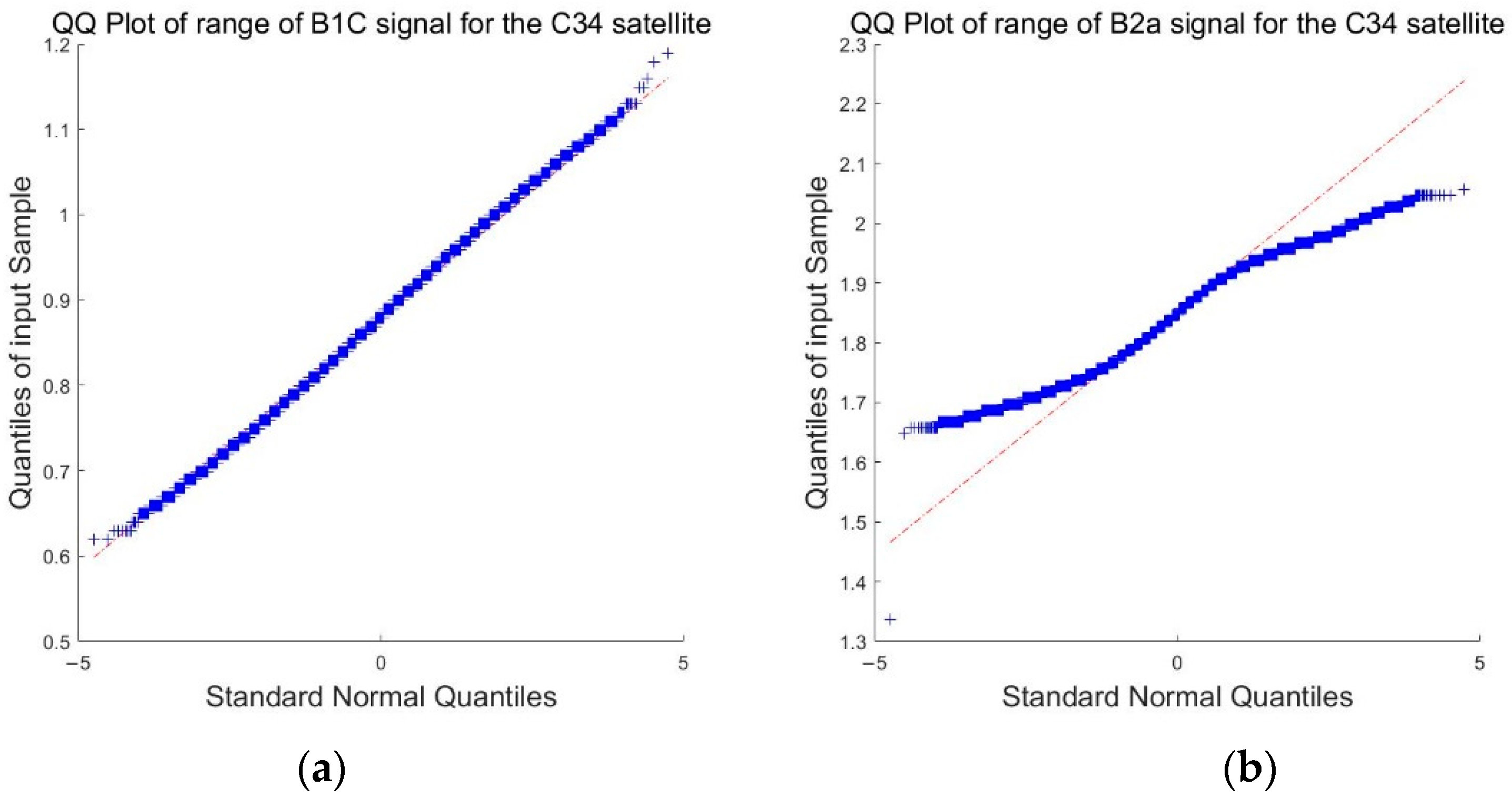
3.1.2. Pseudo-Range Monitoring
3.1.3. Satellite Clock Frequency and Phase Hopping Monitoring
3.2. Performance of Enhancement Ephemeris Monitoring
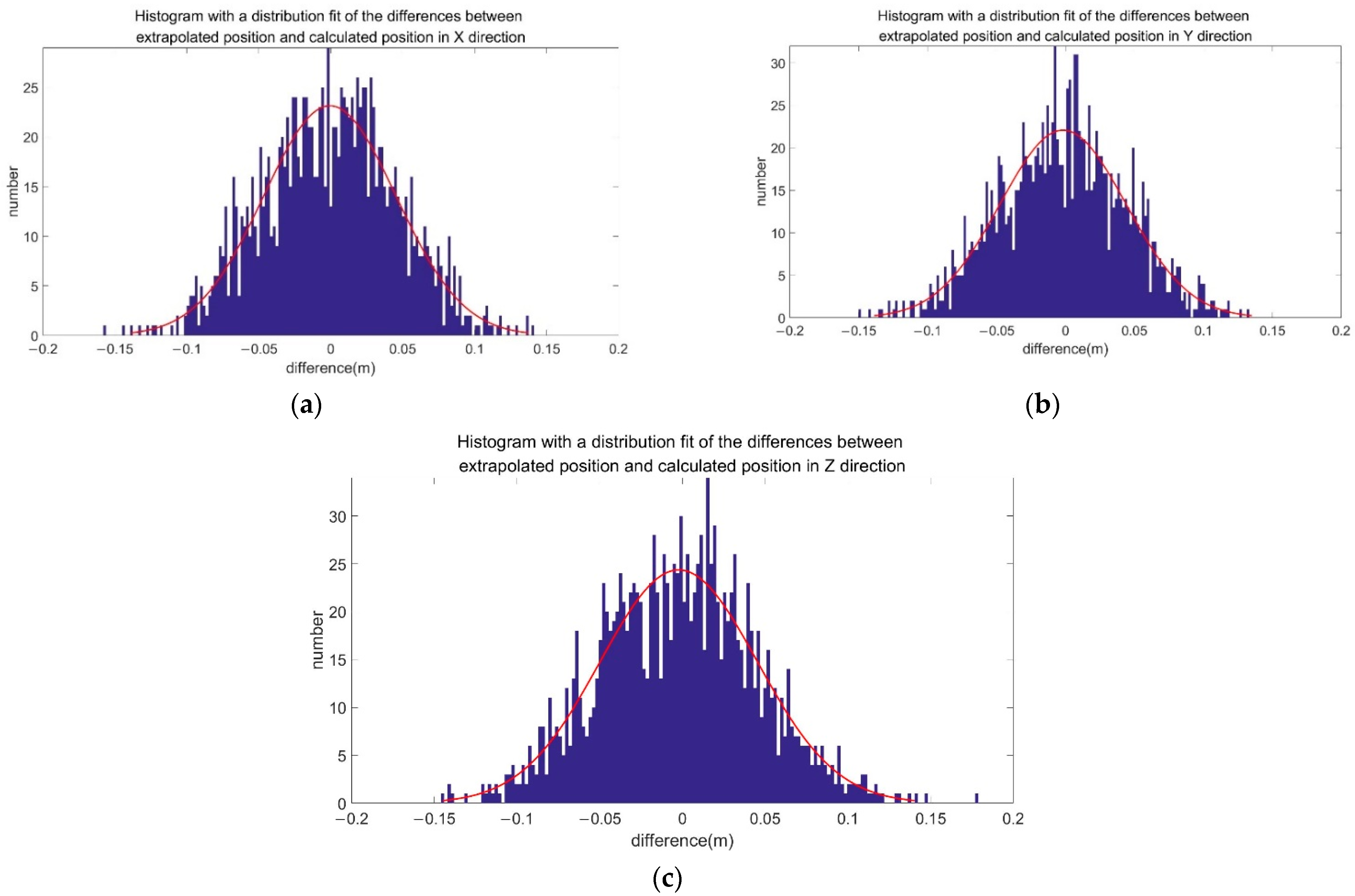
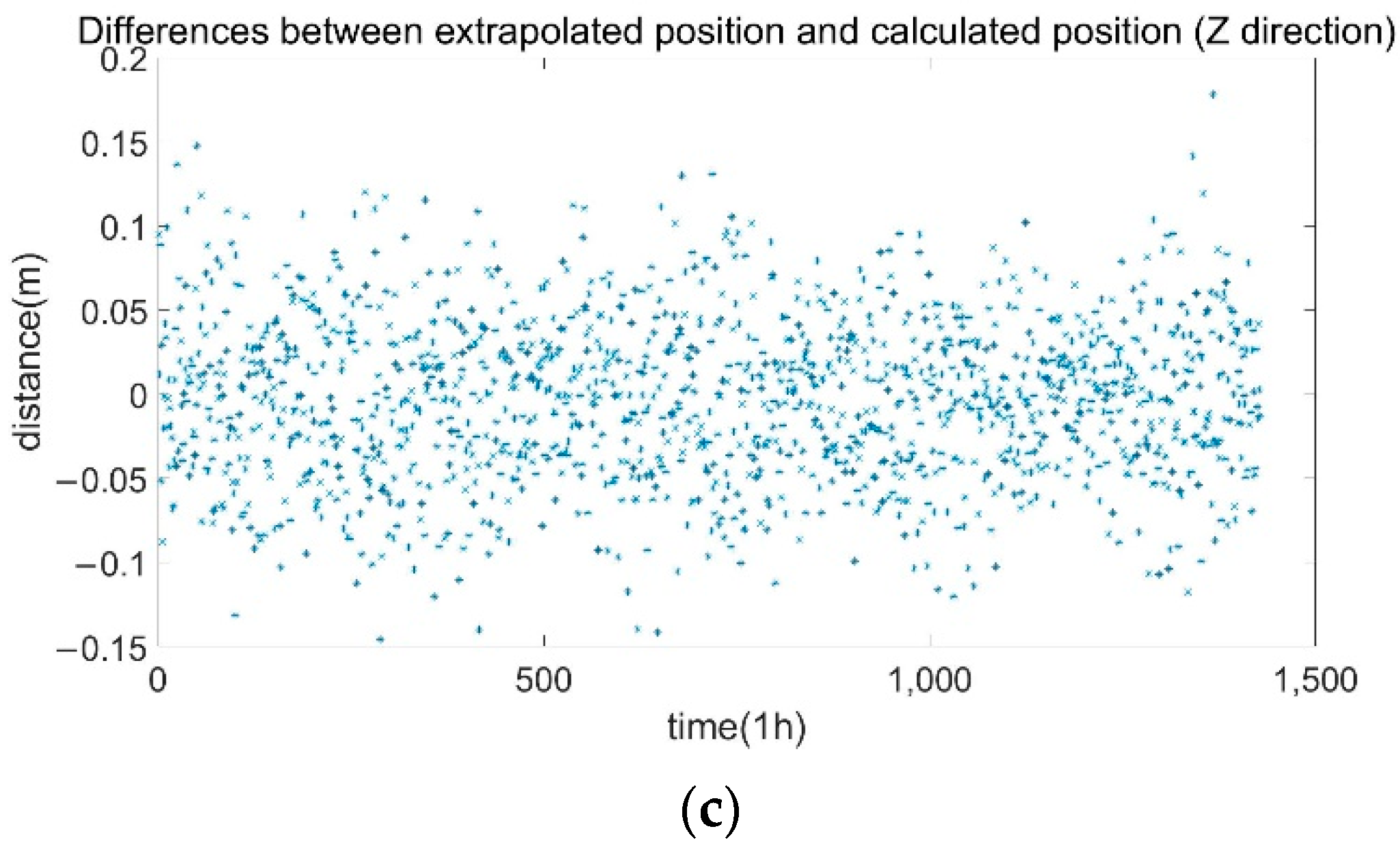
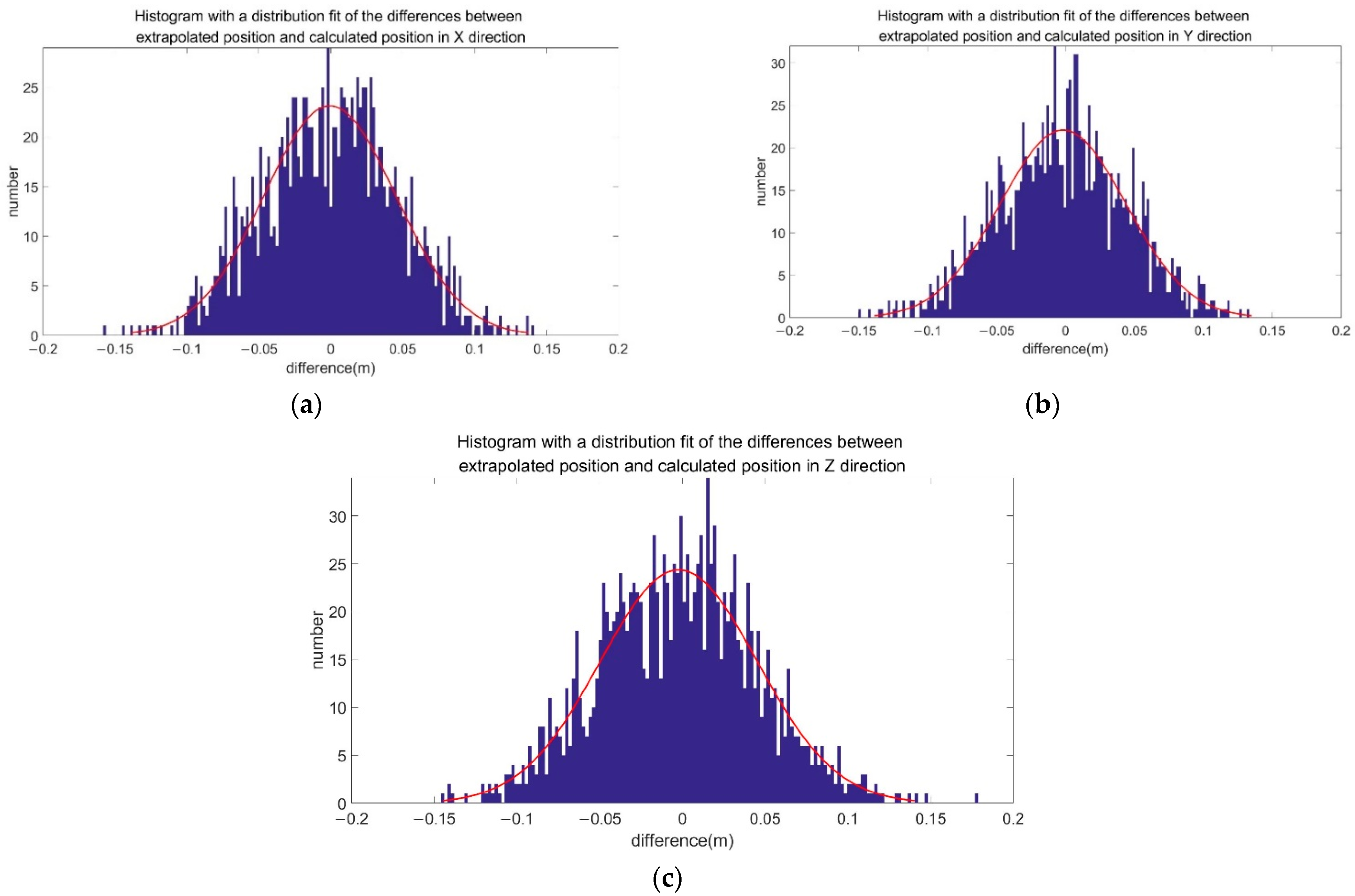
3.2.1. Ephemeris Extrapolation
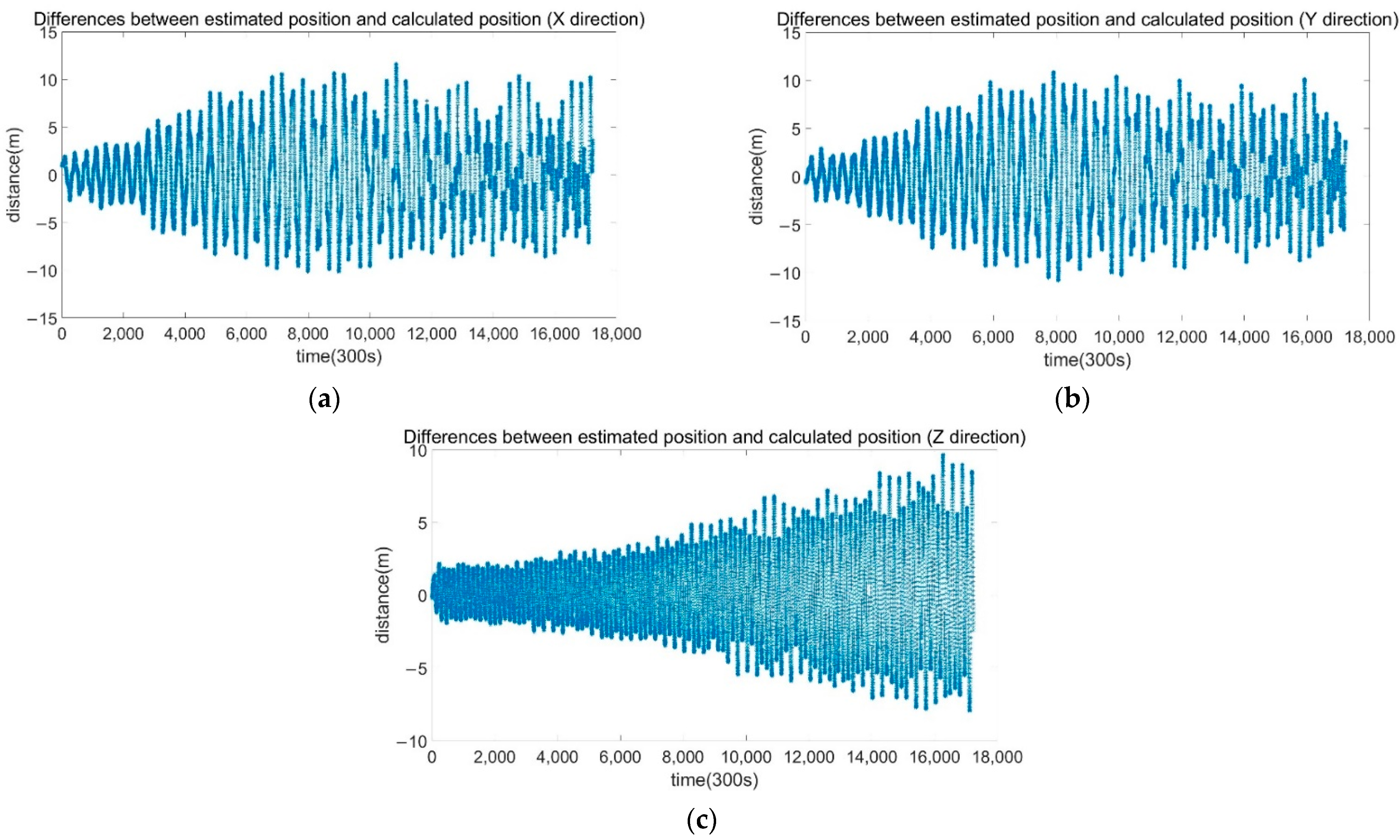
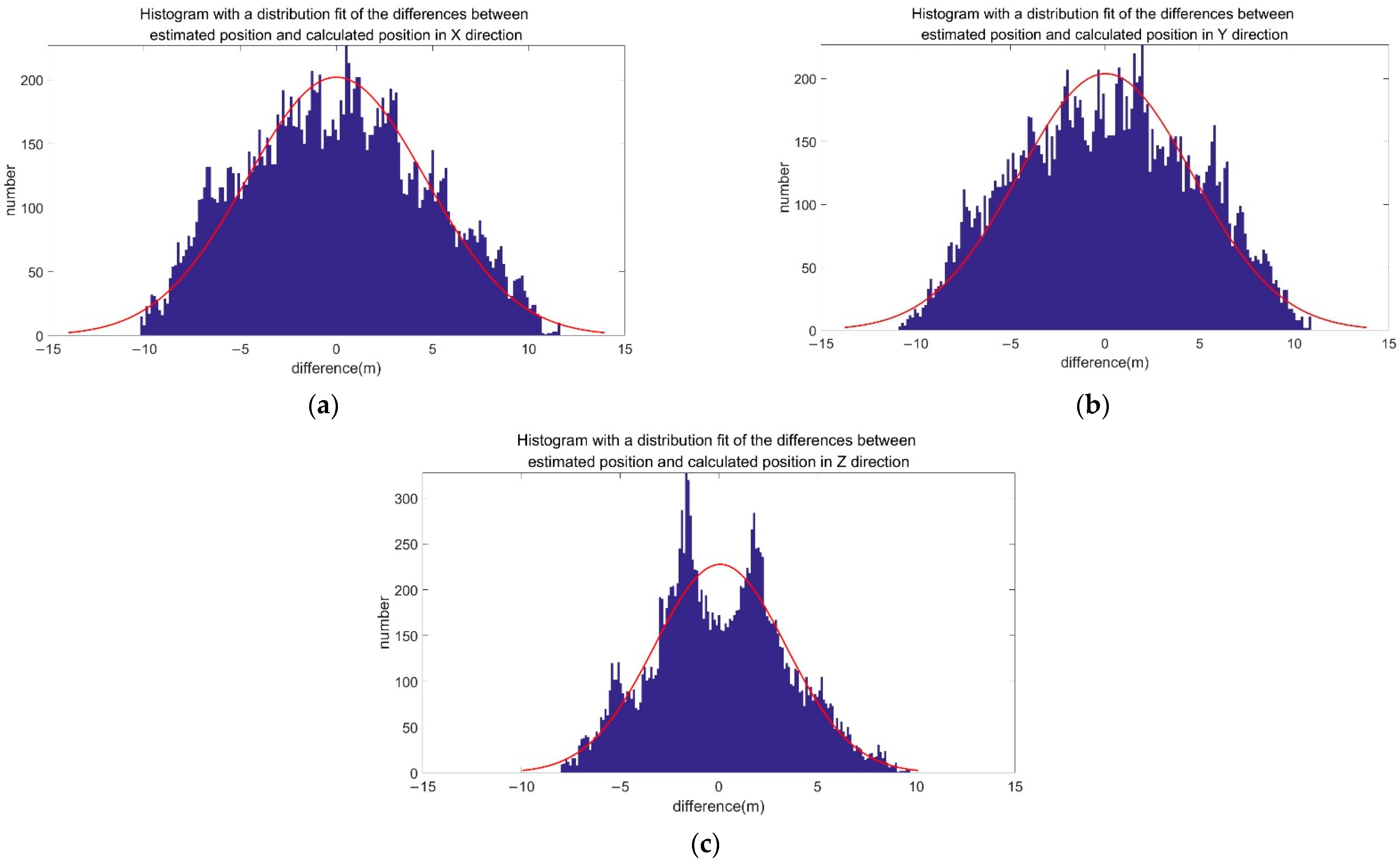
3.2.2. Autonomous Orbit Determination Ephemeris
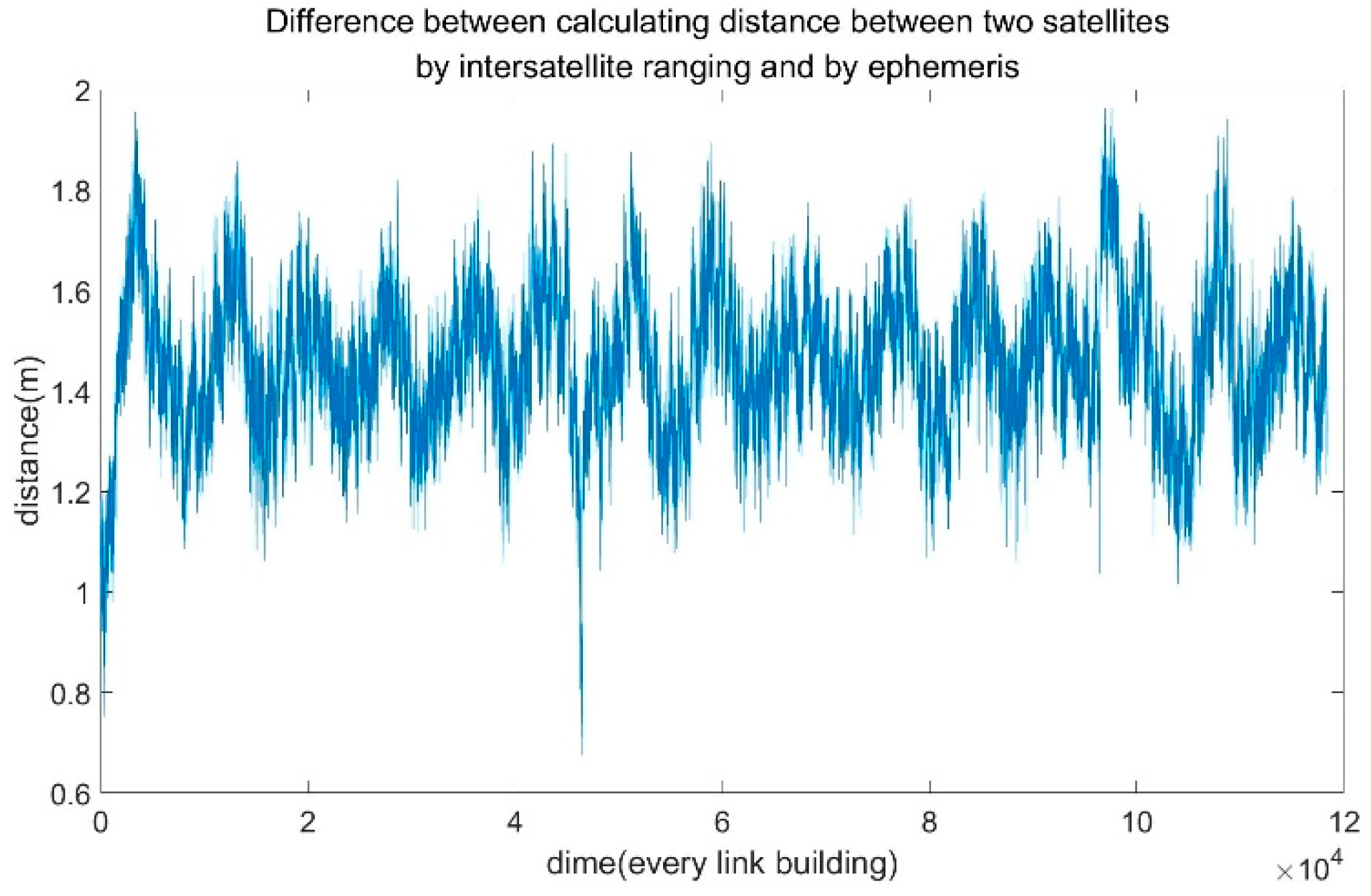
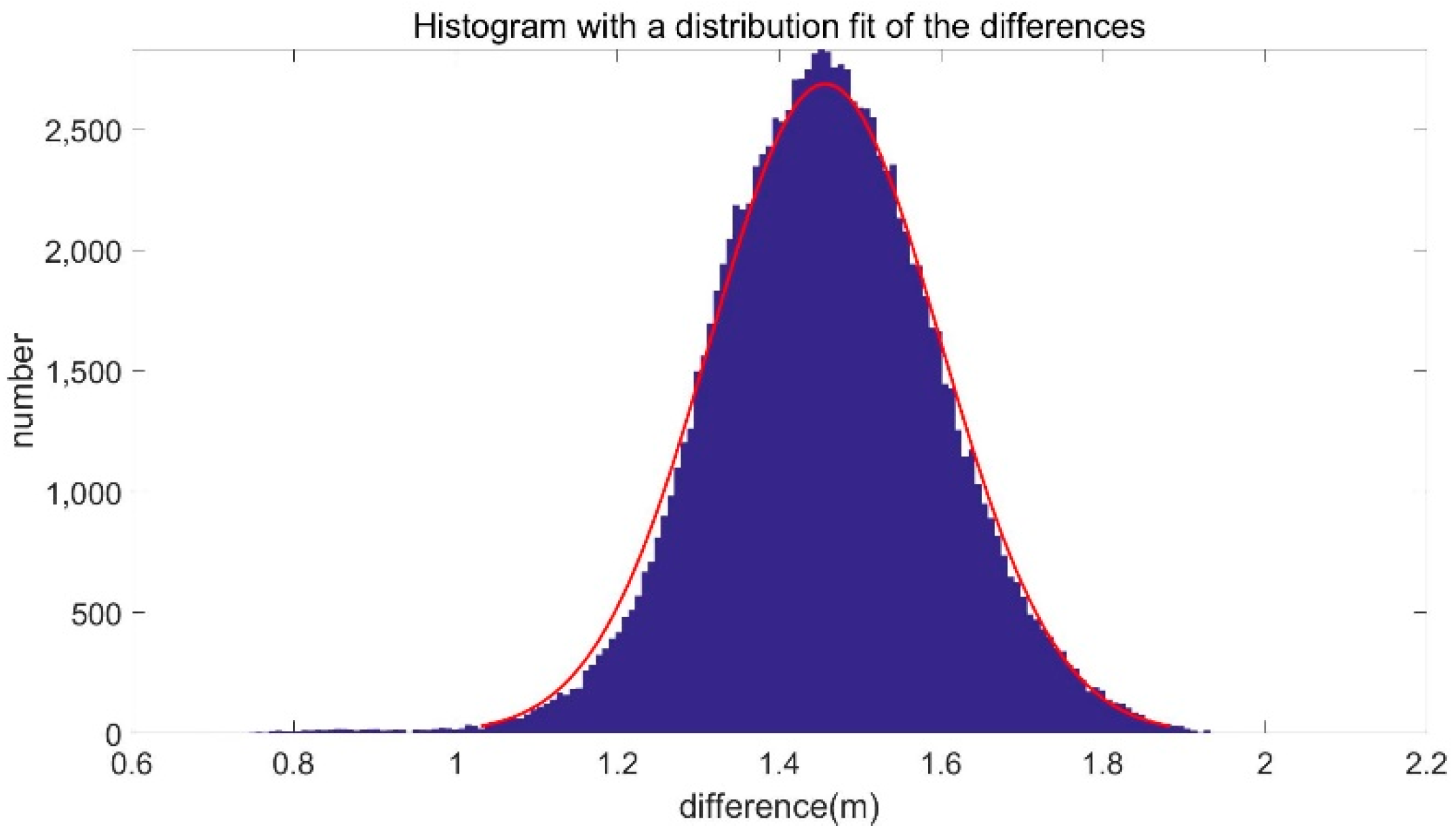
3.2.3. Inter-Satellite Ranging
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hein, G.W. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef] [PubMed]
- International Civil Aviation Organization (ICAO). Annex 10, Volume I (Radio Navigation Aids), “Aeronautical Telecommunications”, 5th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 1996. [Google Scholar]
- Ochieng, W.Y.; Sauer, K.; Walsh, D.; Brodin, G.; Griffin, S.; Denney, M. GPS Integrity and Potential Impact on Aviation Safety. J. Navig. 2003, 56, 51–65. [Google Scholar] [CrossRef]
- Kovach, K.; Dobyne, J.; Crews, M.; Miles, C. GPS III Integrity Concept. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Medel, C.H.; Catalan, C.C.; Vidou, M.A.F.; Perez, E.S. The Galileo Ground Segment Integrity Algorithms: Design and Performance. Int. J. Navig. Obs. 2008, 2008, 178927. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.X.; Mao, Y.; Sun, B.J. Basic performance and future developments of BeiDou global navigation satellite system. Satell. Navig. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Chen, J.; Hu, X.; He, F.; Bian, L.; Wang, W.; Wu, B.; Yu, Y.; Wang, J.; Tian, Q. Design of BDS-3 integrity monitoring and preliminary analysis of its performance. Adv. Space Res. 2020, 65, 1125–1138. [Google Scholar] [CrossRef]
- Hewitson, S.; Wang, J. GNSS Receiver Autonomous Integrity Monitoring (RAIM) Performance Analysis. GPS Solut. 2005, 10, 155–170. [Google Scholar] [CrossRef]
- Gratton, L.; Joerger, M.; Pervan, B. Carrier phase relative RAIM algorithms and protection level derivation. J. Navig. 2010, 63, 215–231. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez, I.; García, C.; Catalán, C.; Mozo, A.; Tavella, P.; Galleani, L.; Rochat, P.; Wang, Q.; Amarillo, F. Satellite Autonomous Integrity Monitoring (SAIM) for GNSS Systems. In Proceedings of the 22nd International Meeting of the Satellite Division of the Institute of Navigation, Savannah, GA, USA, 22–25 September 2009; pp. 1330–1342. [Google Scholar]
- Xu, H.; Wang, J.; Zhan, X. GNSS Satellite Autonomous Integrity Monitoring (SAIM) using inter-satellite measurements. Adv. Space Res. 2011, 47, 1116–1126. [Google Scholar] [CrossRef]
- Rodríguez-Pérez, I.; García-Serrano, C.; Catalán, C.C.; García, A.M.; Tavella, P.; Galleani, L.; Amarillo, F. Inter-satellite links for satellite autonomous integrity monitoring. Adv. Space Res. 2011, 47, 197–212. [Google Scholar] [CrossRef]
- Wolf, R. Onboard Autonomous Integrity Monitoring using Intersatellite Links. In Proceedings of the ION GPS 2000, Salt Lake City, UT, USA, 19–22 September 2000; pp. 1572–1581. [Google Scholar]
- Fernandez, F.A. Inter-satellite ranging and inter-satellite communication links for enhancing GNSS satellite broadcast navigation data. Adv. Space Res. 2011, 47, 786–801. [Google Scholar] [CrossRef]
- Vioarsson, L.; Pullen, S.; Green, G.; Enge, P. Satellite Autonomous Integrity Monitoring and its Role in Enhancing GPS User Performance. In Proceedings of the ION GPS 2001, Institute of Navigation, Salt Lake, UT, USA, 11–14 September 2001; pp. 690–702. [Google Scholar]
- Bian, L.; Liu, W.; Yan, T.; Cao, Y.; Li, R.; Wang, W.; Liu, X.; Lei, W.; Meng, Y.; Zhang, L. Satellite Integrity Autonomous Monitoring (SAIM) of BDS and Onboard Performance Evaluation. In China Satellite Navigation Conference (CSNC) 2018 Proceedings. CSNC 2018; Sun, J., Yang, C., Guo, S., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2018; Volume 497, pp. 819–832. [Google Scholar] [CrossRef]
- Liu, W.; Hao, J.; Lv, Z.; Xie, H.; Tian, Y. A Method of Integrity Monitoring and Assessment for BeiDou Navigation Satellite System. Lect. Notes Electr. Eng. 2013, 244, 211–219. [Google Scholar] [CrossRef]
- Cao, Y.; Hu, X.; Chen, J.; Bian, L.; Wang, W.; Li, R.; Wang, X.; Rao, Y.; Meng, X.; Wu, B. Initial analysis of the BDS satellite autonomous integrity monitoring capability. GPS Solut. 2019, 23, 35. [Google Scholar] [CrossRef]
- Chen, L.; Gao, W.; Hu, Z.; Cao, Y.; Pei, L.; Liu, C.; Zhou, W.; Liu, X.; Chen, L.; Yang, R. BDS-3 Integrity Risk Modeling and Probability Evaluation. Remote Sens. 2022, 14, 944. [Google Scholar] [CrossRef]
- BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal B1C (Version 1.0). 2021. Available online: https://en.beidou.gov.cn/xt/gfxz/201712/P020171226740641381817.pdf (accessed on 24 May 2022).
- Chang, J.; Shang, L.; Li, G. The Accuracy Analysis of Autonomous Orbit Determination Based on Onboard Observation Data of Inter-Satellite Link. In China Satellite Navigation Conference (CSNC) 2016 Proceedings: Volume III; Sun, J., Liu, J., Fan, S., Wang, F., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2016; Volume 390. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| X Direction (m) | Y Direction (m) | Z Direction (m) | ||
|---|---|---|---|---|
| C27 | Variance | 0.046 | 0.046 | 0.048 |
| Skewness | −0.03 | −0.04 | 0.06 | |
| Kurtosis | 2.80 | 2.84 | 2.98 | |
| X Direction (m) | Y Direction (m) | Z Direction (m) | ||
|---|---|---|---|---|
| C27 | Variance | 4.65 | 4.59 | 3.34 |
| Skewness | 0.09 | 0.002 | 0.11 | |
| Kurtosis | 2.27 | 2.21 | 2.56 | |
| Statistical Results (m) | ||
|---|---|---|
| The distance between the C25 satellite and the C26 satellite calculated by inter-satellite ranging and the ephemeris | Variance | 0.14 |
| Skewness | −0.14 | |
| Kurtosis | 3.76 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Dai, Y.; Gao, W.; Cao, Y.; Hu, Z.; Ren, Q.; Nie, X.; Zheng, J.; Shao, R.; Pei, L.; et al. Performance Analysis of BDS-3 SAIM and Enhancement Research on Autonomous Satellite Ephemeris Monitoring. Remote Sens. 2022, 14, 3543. https://doi.org/10.3390/rs14153543
Chen L, Dai Y, Gao W, Cao Y, Hu Z, Ren Q, Nie X, Zheng J, Shao R, Pei L, et al. Performance Analysis of BDS-3 SAIM and Enhancement Research on Autonomous Satellite Ephemeris Monitoring. Remote Sensing. 2022; 14(15):3543. https://doi.org/10.3390/rs14153543
Chicago/Turabian StyleChen, Lei, Yongshan Dai, Weiguang Gao, Yueling Cao, Zhigang Hu, Qianyi Ren, Xin Nie, Jiaju Zheng, Ruiqiang Shao, Ling Pei, and et al. 2022. "Performance Analysis of BDS-3 SAIM and Enhancement Research on Autonomous Satellite Ephemeris Monitoring" Remote Sensing 14, no. 15: 3543. https://doi.org/10.3390/rs14153543
APA StyleChen, L., Dai, Y., Gao, W., Cao, Y., Hu, Z., Ren, Q., Nie, X., Zheng, J., Shao, R., Pei, L., & Wang, L. (2022). Performance Analysis of BDS-3 SAIM and Enhancement Research on Autonomous Satellite Ephemeris Monitoring. Remote Sensing, 14(15), 3543. https://doi.org/10.3390/rs14153543