1. Introduction
The global navigation satellite system (GNSS) is an all-weather, real-time system with high-accuracy and high-automation; therefore, it has been widely used in the field of deformation monitoring in recent decades [
1,
2,
3]. A GNSS deformation monitoring system, in general, employs relative positioning that can achieve millimeter accuracy since errors such as clock error, orbital error, and atmospheric delay are eliminated or attenuated [
4,
5]. The relative positioning is commonly implemented in simple single-baseline solution (SBS) models. However, satellite signal occlusion and low-quality satellite observations frequently present in the complex environments of deformation monitoring, result in limited positioning accuracy and reliability [
6]. In recent years, the rapid development of multiple GNSSs has obviously increased the available satellite numbers and GNSS observations for deformation monitoring [
7,
8]. For example, in experiments with simulated signal oscillation, Roberts et al. [
9] found that combining GPS and BDS observations could improve the positioning accuracy especially for the height component. In experiments using real data from a large loess landslide and a simulated slow deformation test, Huang et al. [
10] verified that the GPS/BDS solution could significantly enhance positioning reliability and accuracy. Xi et al. [
11] found that, in bridge deformation monitoring, the accuracy of combined GPS/BDS positioning was higher than that of a single GNSS system by 20–30%.
Another issue of the traditional SBS model is the residual tropospheric delay. Tropospheric delays, especially in baselines with large height differences or long lengths, cannot be eliminated by operations such as differencing and simple parameter estimation, leading to serious degradation of the monitoring accuracy [
12,
13,
14,
15,
16,
17,
18,
19,
20]. Many data processing strategies have been proposed to reduce the influence of the residual troposphere delay in relative positioning. For example, Li et al. [
21] introduced the relative zenith tropospheric delay (RZTD) parameter into the ambiguity function method (AFM) equation to improve the accuracy and reliability of tropospheric parameter estimation for deformation monitoring of super high-rise buildings. Jacek [
22] proposed a multi-antenna atmospheric error constraint algorithm for multiple baselines to improve the ambiguity success rate of medium-long baselines in RTK. Although multiple antennas provide more observations, the geometric strength of the constraint is limited since the distance between antennas is short.
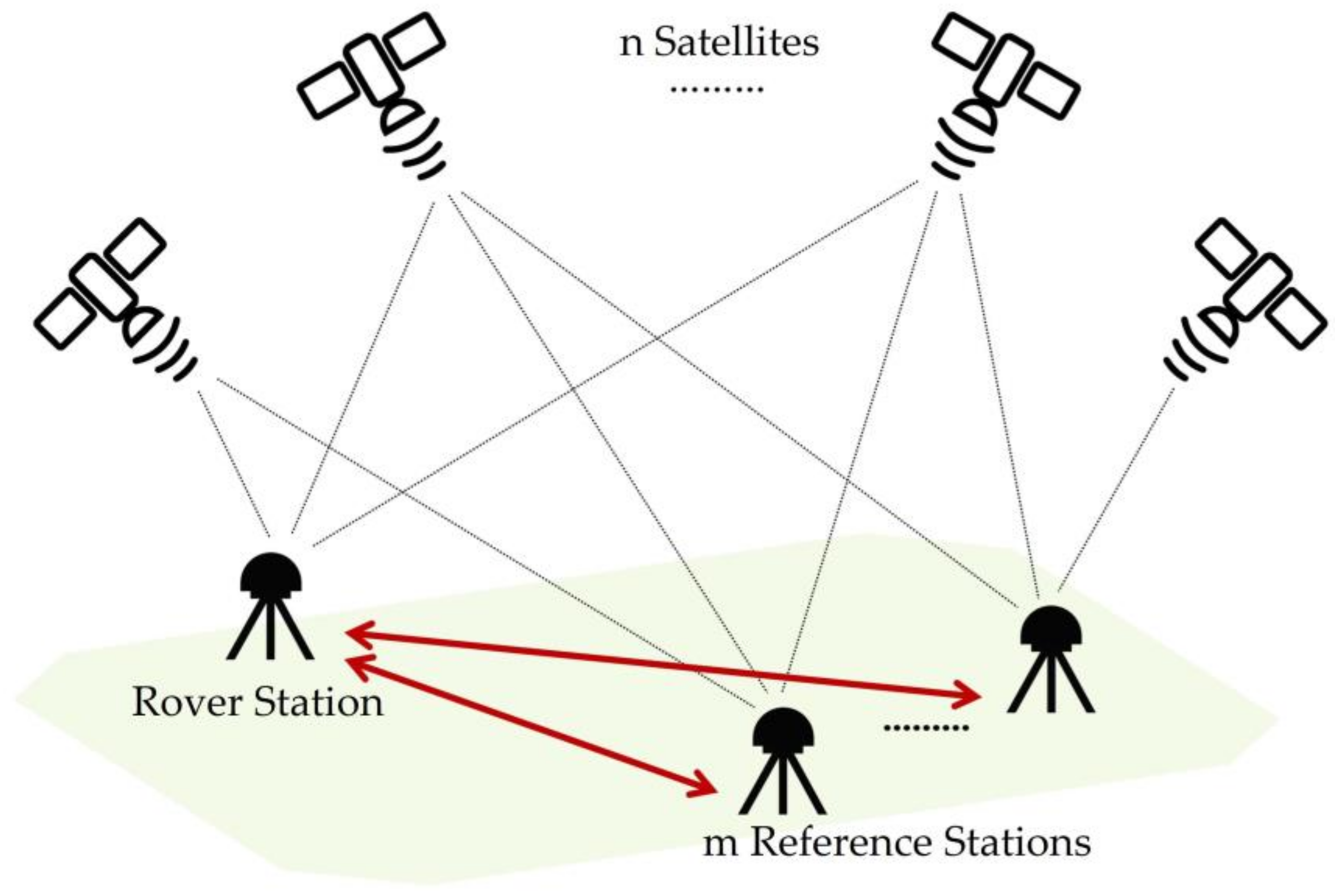
Multiple reference stations are widely used in GNSS deformation monitoring projects especially for those with a large monitoring area [
23]. As a result, the multi-baseline solution (MBS) model is sometimes more practical. The MBS model is theoretically more rigorous than the SBS model since it considers inter-baseline correlation. More importantly, MBS enhances the satellite geometry and increases observation redundancy [
24]. For example, Amin et al. [
25] employed the MBS model to increase the reliability of GPS monitoring networks by adopting a uniform datum and eliminating synchronous baseline closure errors in the optimal design of large GNSS control networks. Wang et al. [
26] enhanced the availability of RTK positioning by roughly 10% using a multi-reference station constraint algorithm based on the equivalence principle in autonomous vehicle navigation. Fan et al. [
27] proposed a dual-antenna RTK algorithm with baseline vector constraint to improve the system ambiguity resolution (AR) success rate from 48 to 85%. The MBS model has been less explored in deformation monitoring than the SBS model. One important reason is that in MBS the stochastic model for differential observations becomes more sophisticated [
28]. Most of the present commercial software is developed based on the SBS model [
29,
30,
31]. To solve this problem, some researchers have proposed the equivalent double-differenced (DD) observation equations [
32,
33,
34], in which a transformation matrix is generated to eliminate receiver clock errors and satellite clock errors. Although the equivalent DD equations can preserve the diagonality of the stochastic model, the solution is still inefficient due to the transformation matrix. Previous research of the MBS mainly focused on the solutions of large control networks, the improvement of the ambiguity fixing rate for dynamic positioning, and the complexity reduction of the solutions of traditional DD equations.
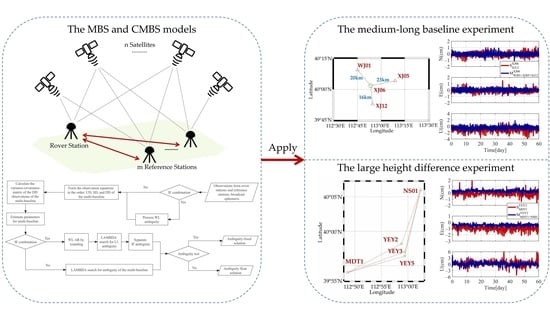
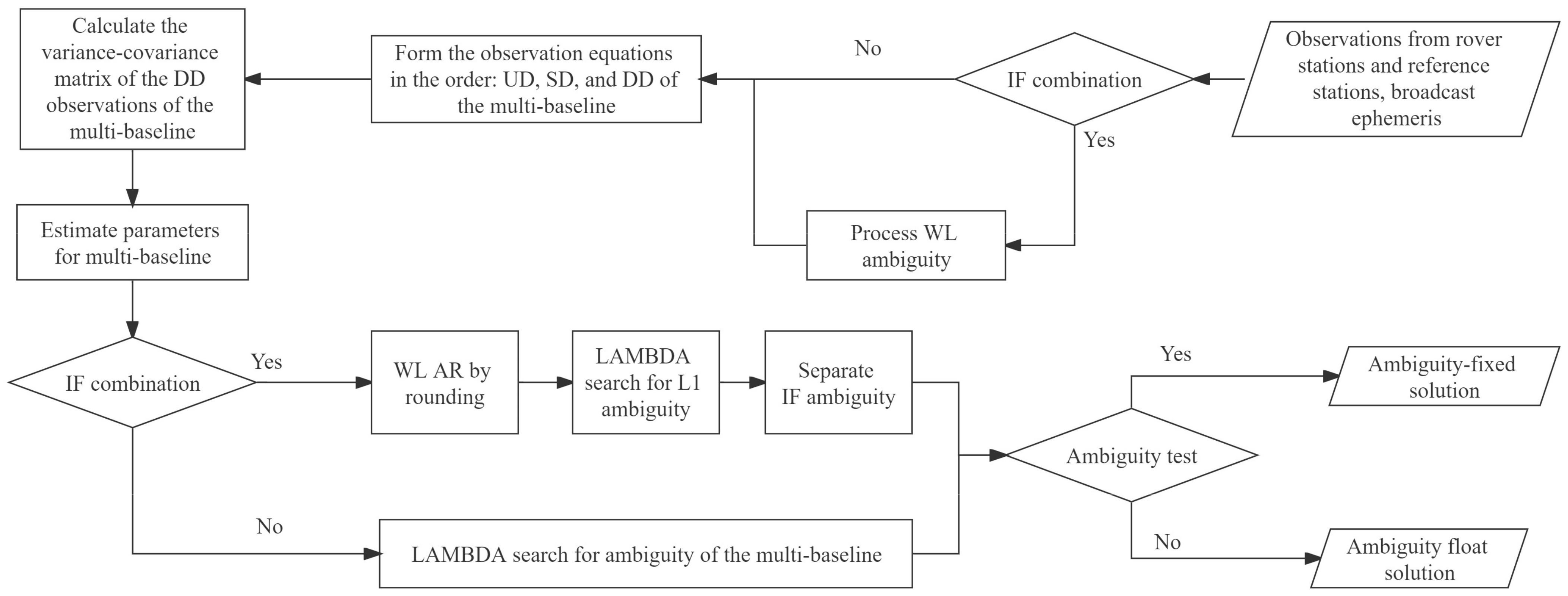
Section 2 gives the data processing strategy of the MBS model. We first derive a multi-baseline mathematical model based on the traditional DD observation equation, and then constrain the MBS model on the tropospheric parameters between multiple baselines based on their spatial correlation. In
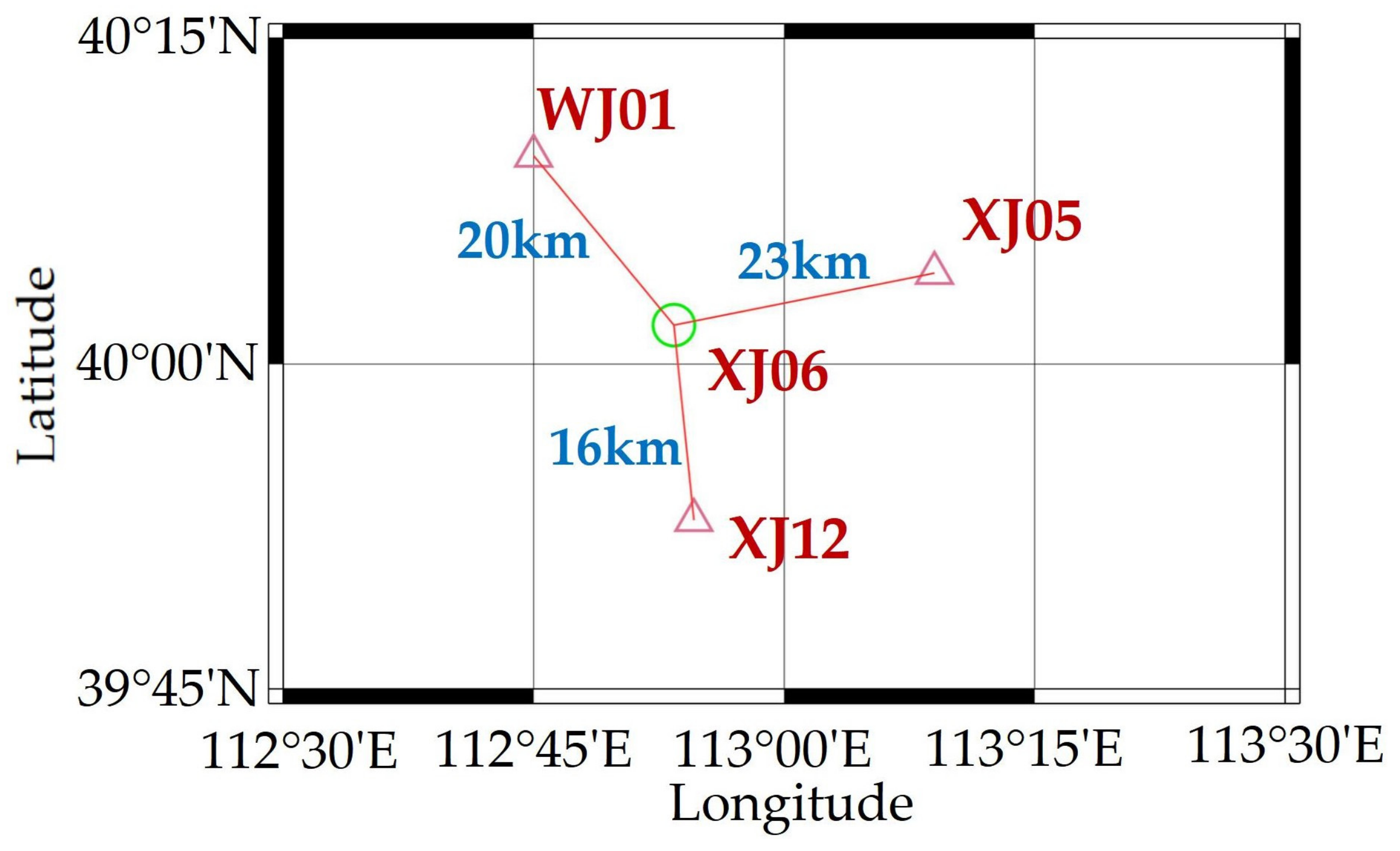
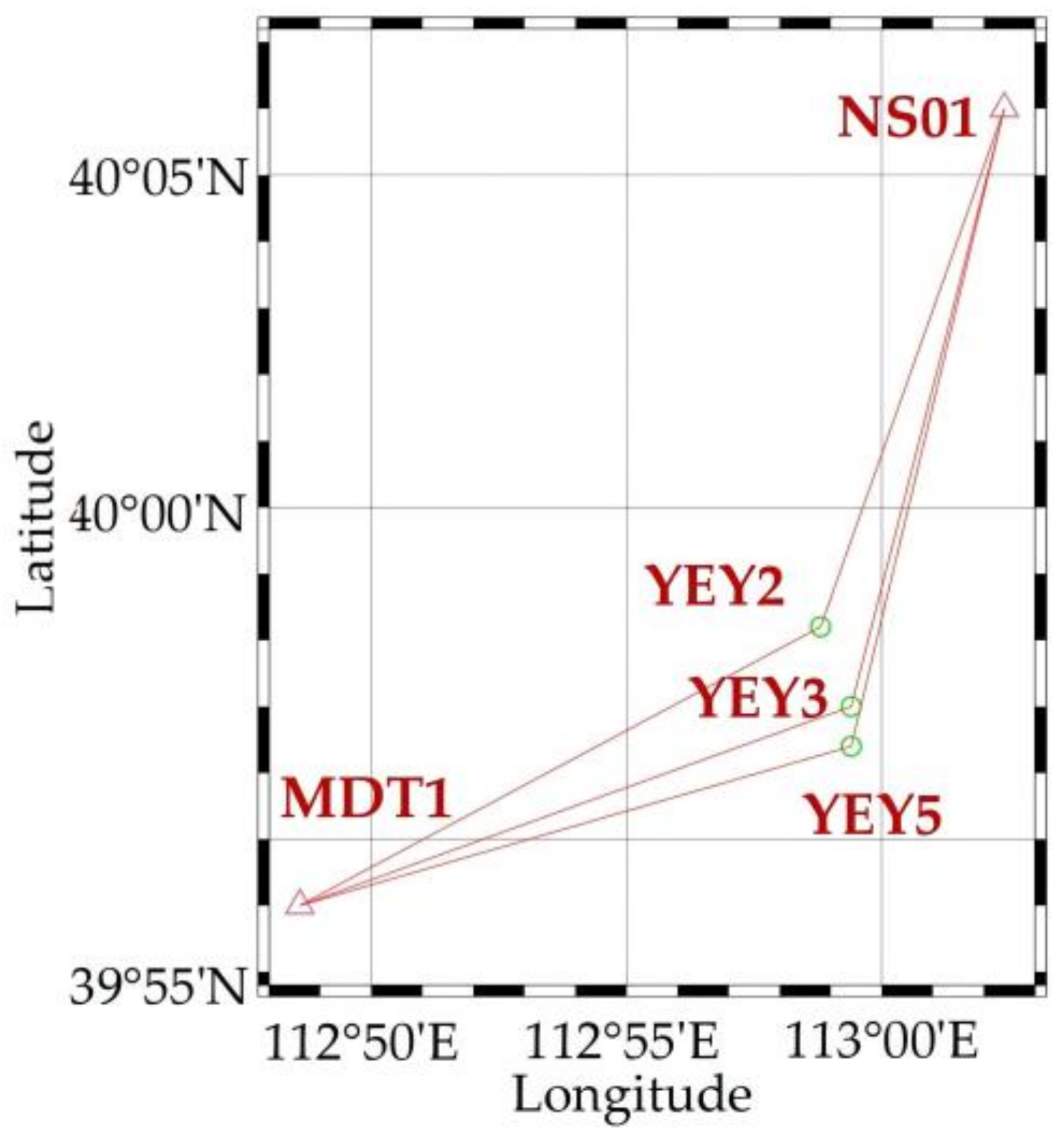
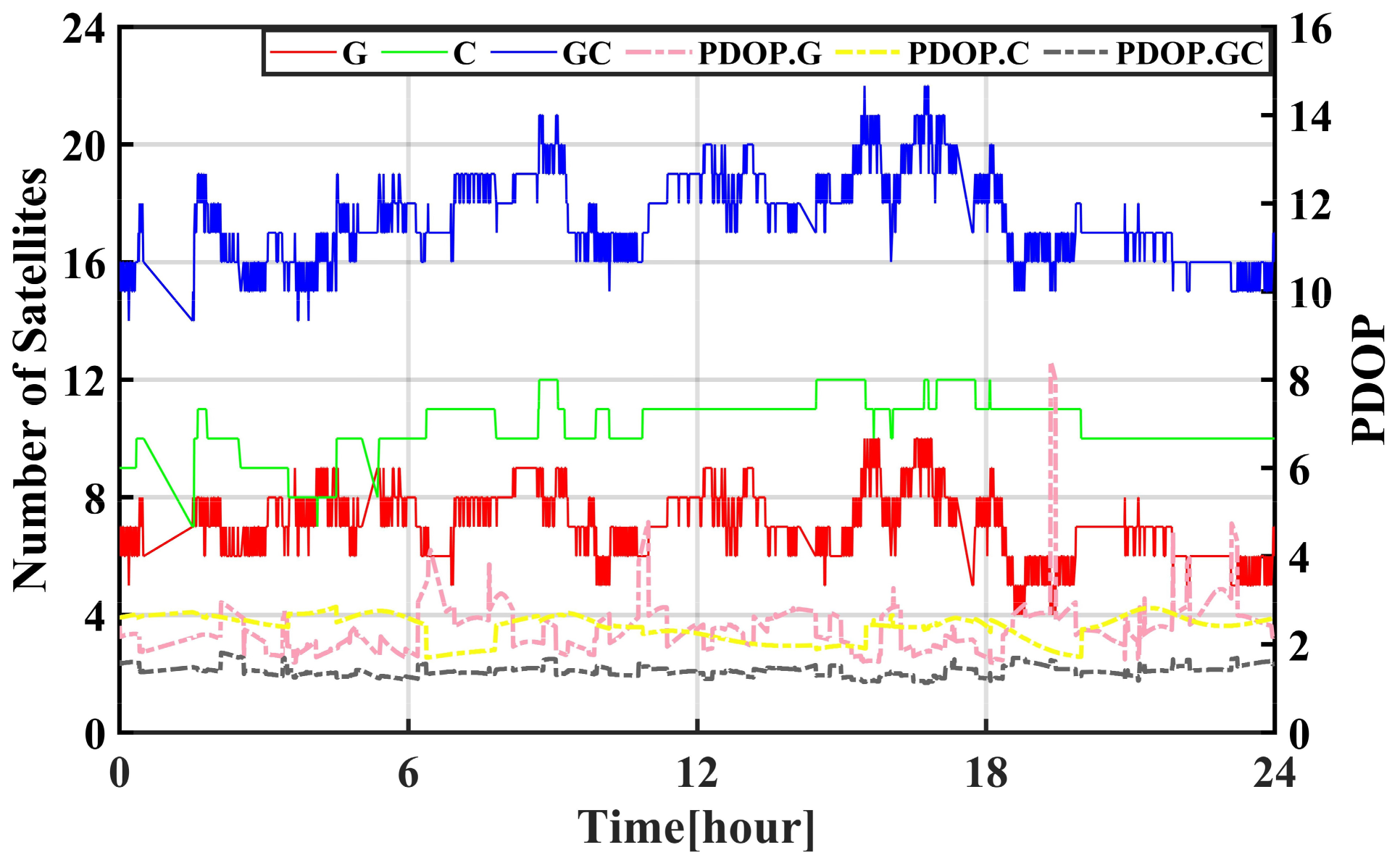
Section 3, a comparative analysis with the SBS model was performed using actual observation datasets to verify and evaluate the performance of the proposed method. The datasets contained baselines with medium-long lengths and large height differences. The experiments were conducted to analyze the performance of the MBS model under different combinations of reference stations, satellite systems, and height differences. Finally, the conclusions are given in
Section 4.
4. Conclusions
The existing GNSS deformation monitoring systems often use the SBS model, which ignores baseline correlation and has limited positioning accuracy when processing baselines with medium-long lengths or large height differences. In this study, we constructed a multi-baseline mathematical model based on DD observation equations and adopted a multi-baseline tropospheric delay estimation method based on a priori constraints on the tropospheric delay parameters.
Datasets from baselines with medium-long lengths and large height differences were used to verify the feasibility of the proposed MBS model, and the following conclusions were obtained from the results:
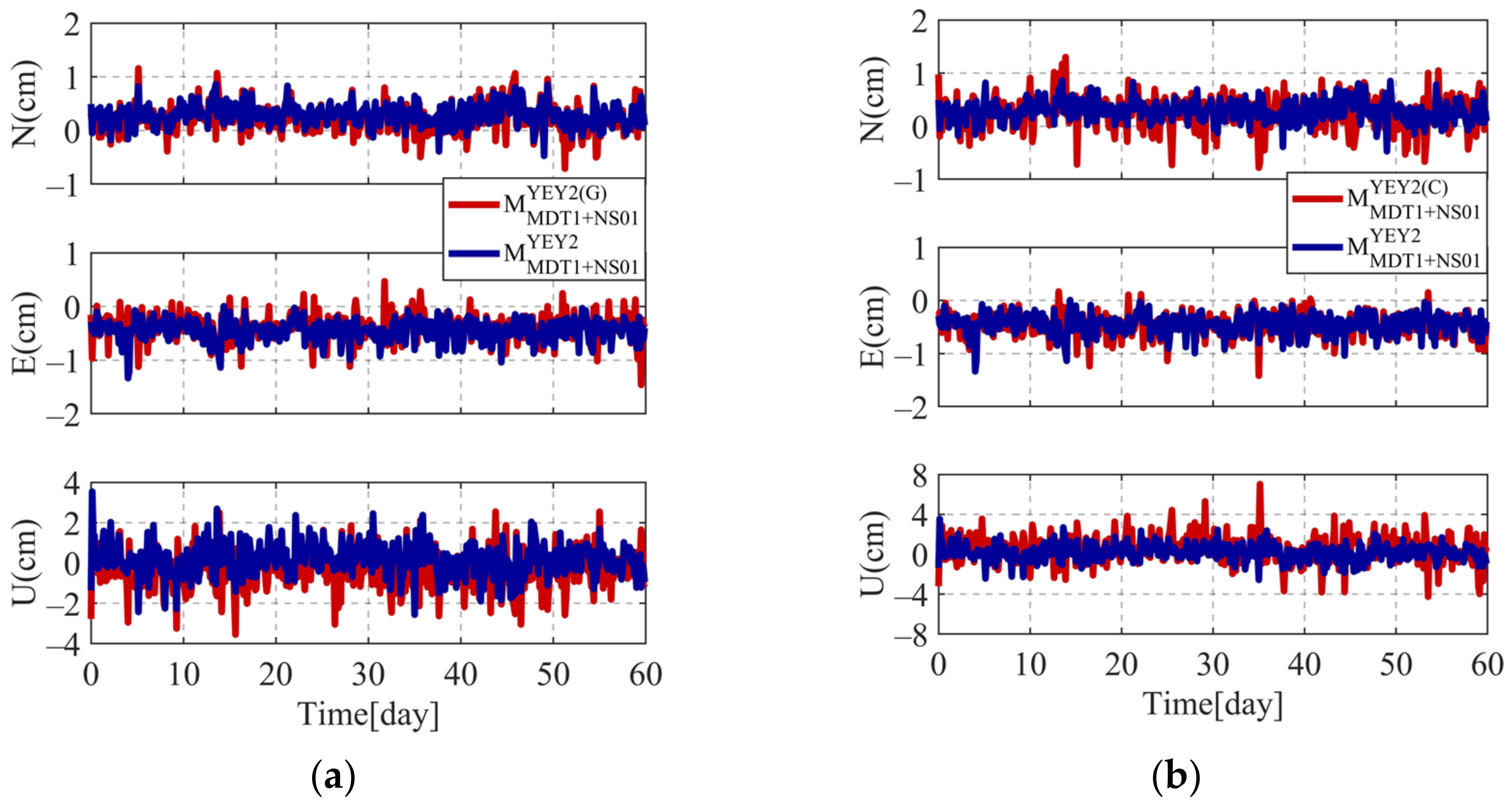
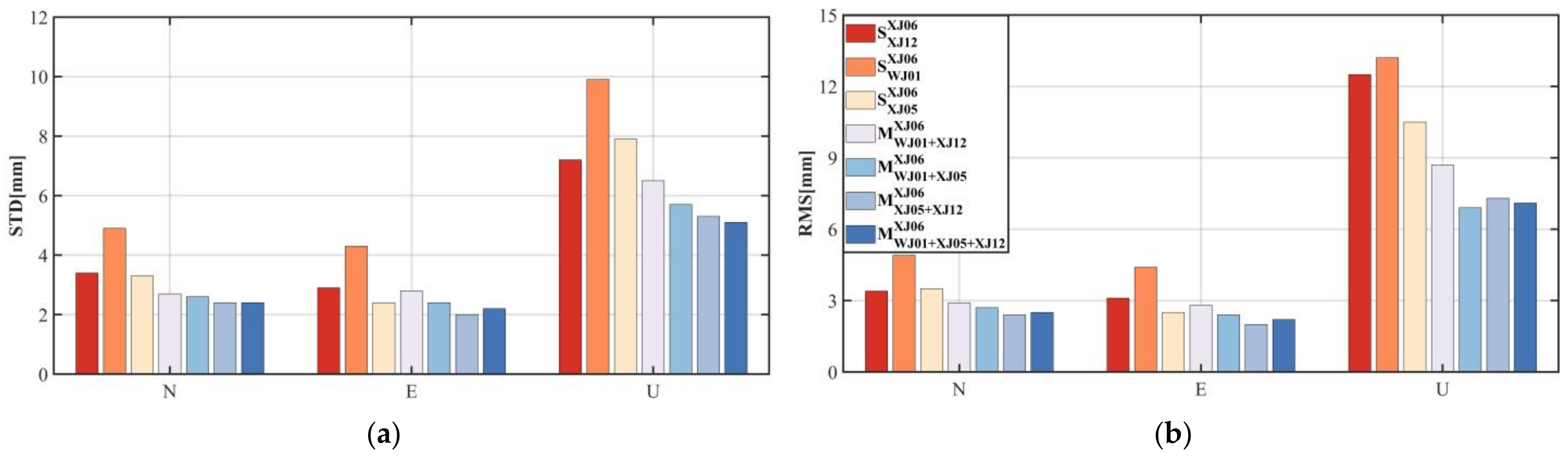
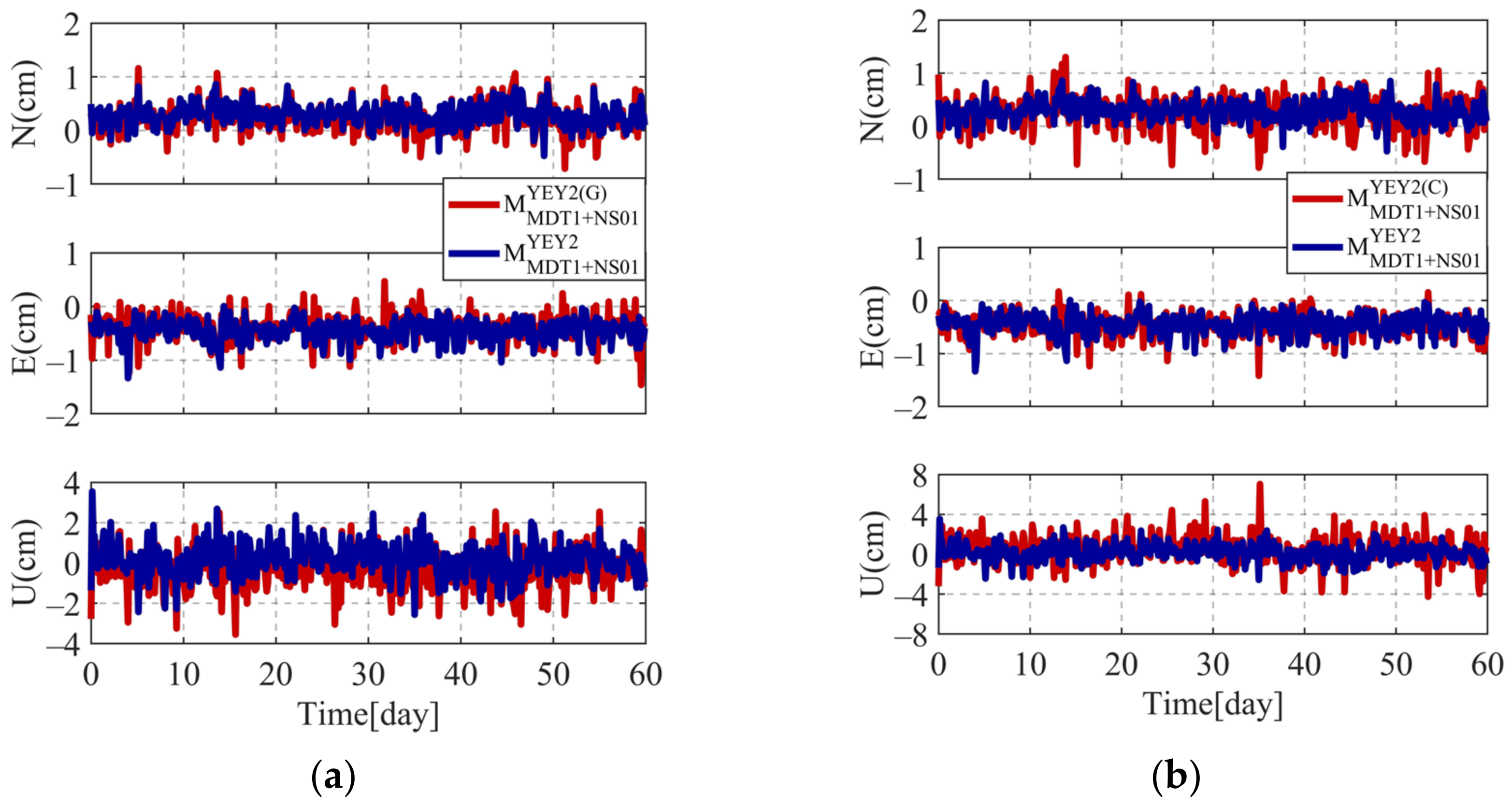
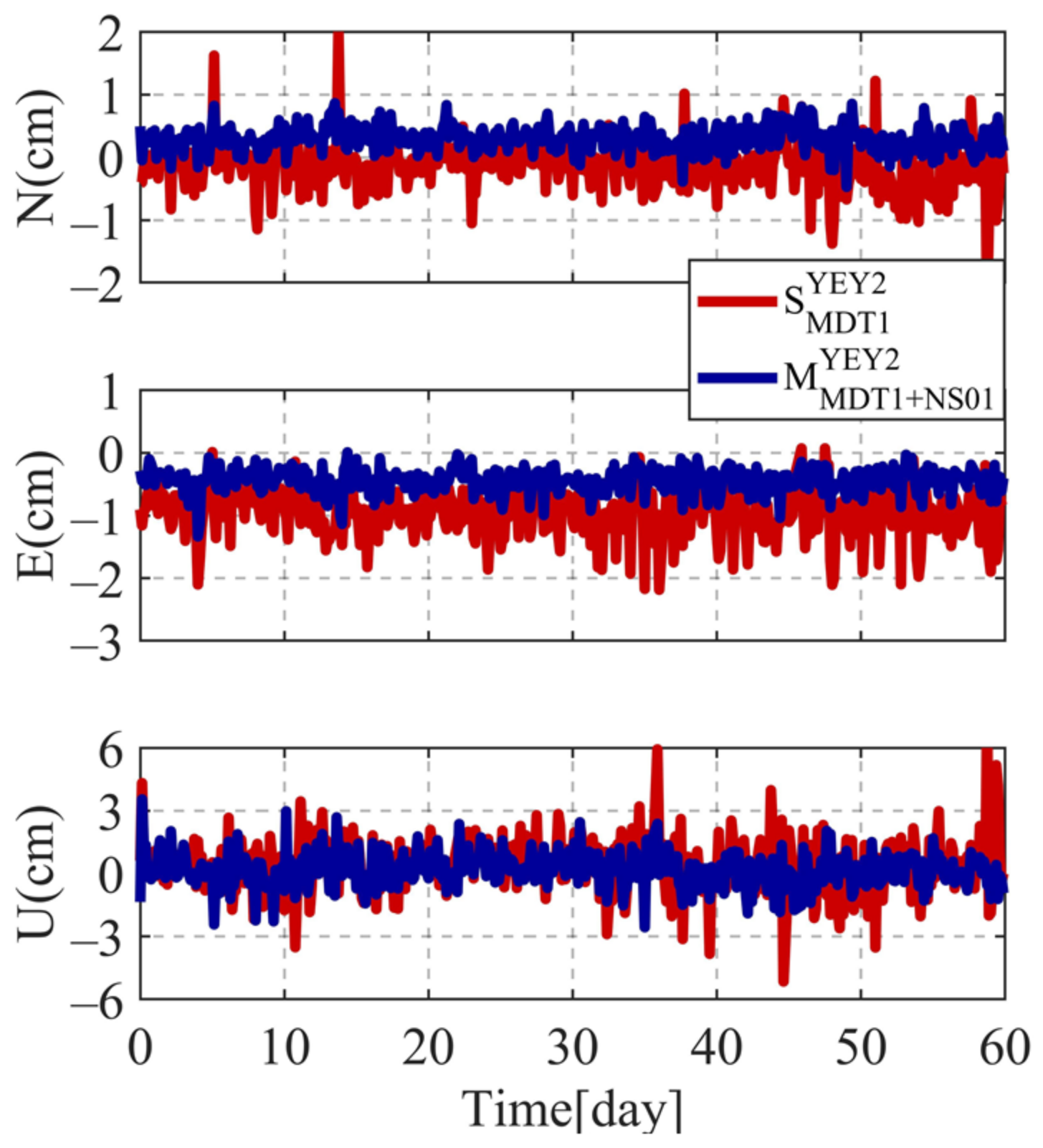
For baselines with medium-long lengths and large height differences, the proposed MBS model can provide better monitoring performance than the SBS model. Compared with the SBS model, the MBS model can improve the positioning accuracy of medium-long baselines with an average improvement of about (25.7/19.0/21.5%) and (22.8/24.2/40.0%) in the N/E/U components, with the highest improvement of about (29.4/31.0/29.2%) and (29.4/35.5/44.8%) in the N/E/U components, respectively. For baselines with large height differences, compared with the SBS model, the MBS model can improve the positioning accuracy with an average improvement of about (40.6/48.3/44.7%) and (36.8/53.7/33.7%) in the N/E/U components, with the highest improvement of about (47.4/51.3/66.2%) and (56.9/60.4/58.4%) in the N/E/U components, respectively. The MBS model uses multiple reference stations thus can improve the positioning model strength and observation redundancy. This is especially beneficial for applying GNSS in complex monitoring environments such as canyons, open pits, slopes, large-area ground settlement, and long-spanned bridges and railroads.
The accuracy of the MBS model is related to the number of reference stations and the quality of the baselines. With comparable baseline quality, the accuracy of the MBS model improves as the number of reference stations increases. Medium-long baseline experimental results show that compared with the SBS model, the MBS model using double reference stations can achieve an average improvement rate of about 24.0%, while the MBS model using triple reference stations can achieve an average improvement rate of about 30.2%.
Compared with GPS-only and BDS-only positioning, the combined GPS/BDS positioning has an accuracy improvement of an average of 13.8 and 25.8% in the baseline components. Meanwhile, the proposed CMBS model can improve accuracy in the U direction and reach up to 45.0%.
Future research will be focused on the application of the MBS approach to near-real-time dynamic monitoring. Baselines with larger tropospheric residual errors will be further investigated.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}