
Laboratory Calibration of an Ultraviolet–Visible Imaging Spectropolarimeter

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Instrument Configuration and Radiometric Model
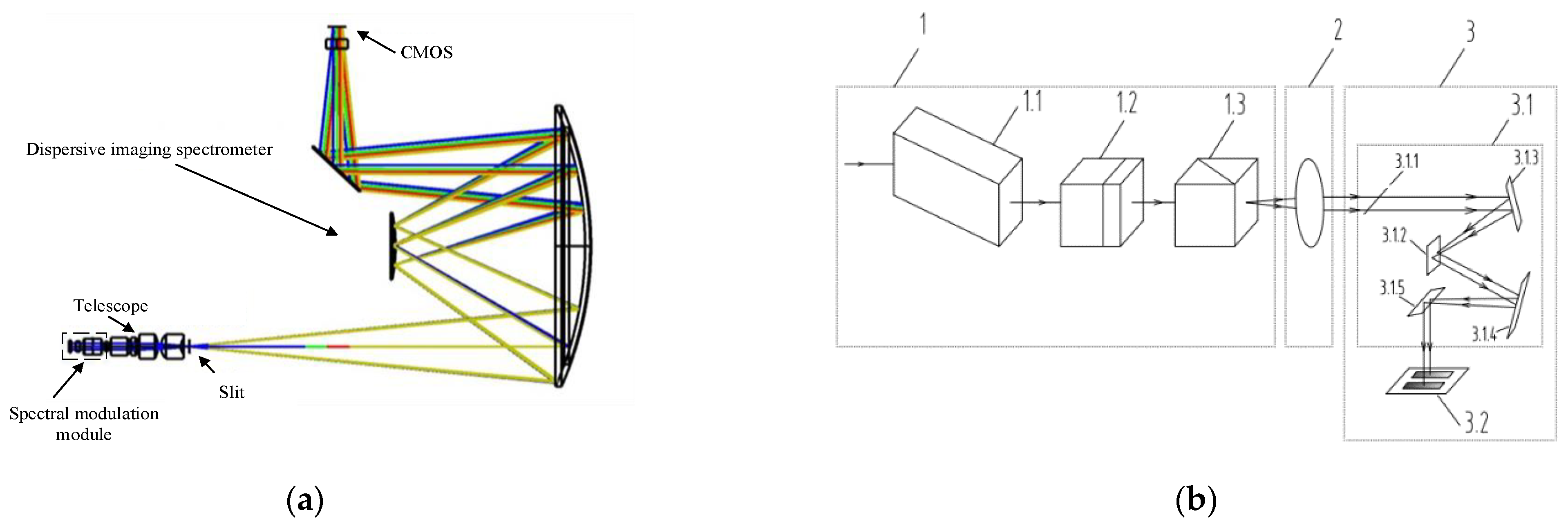
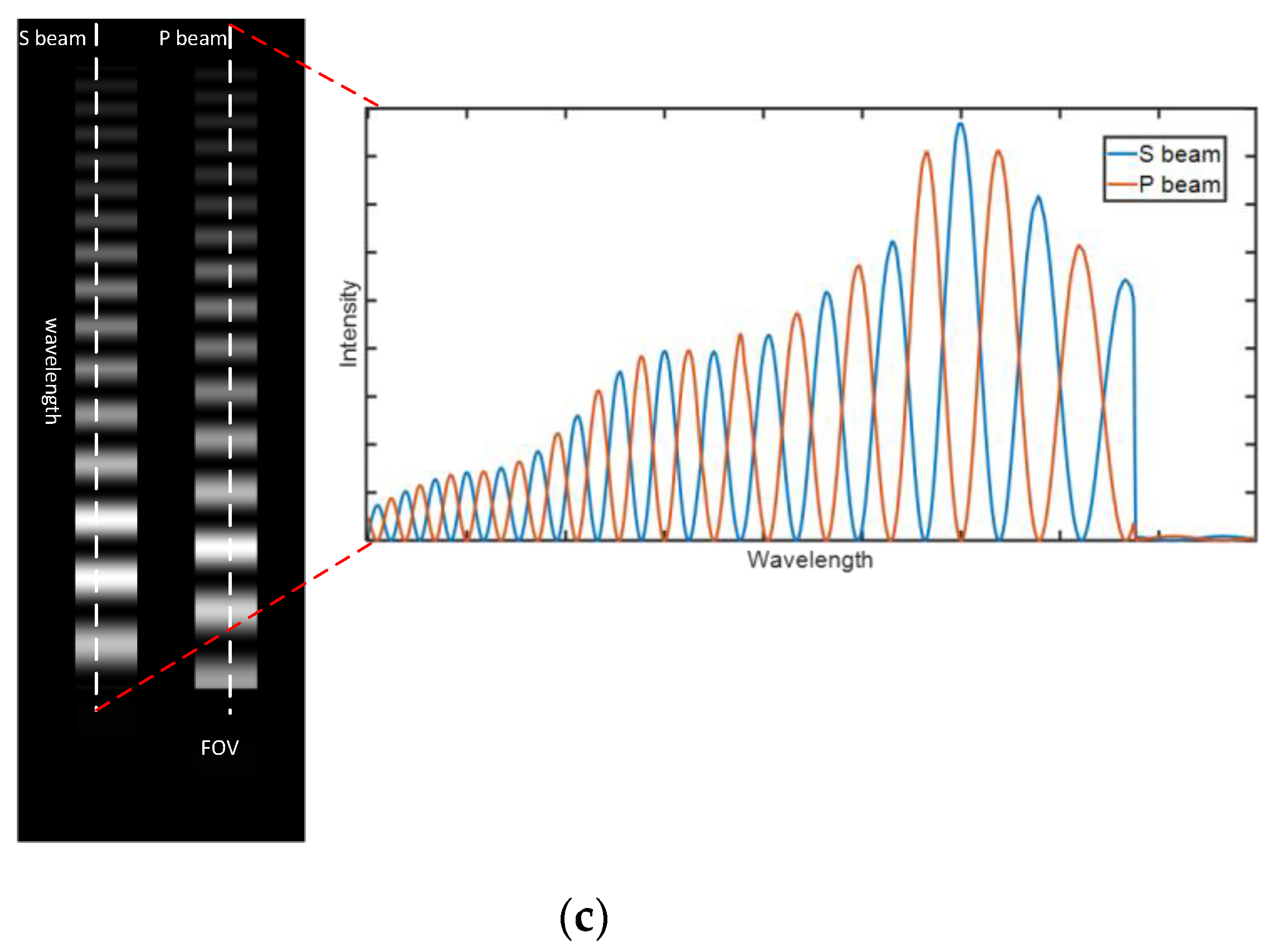
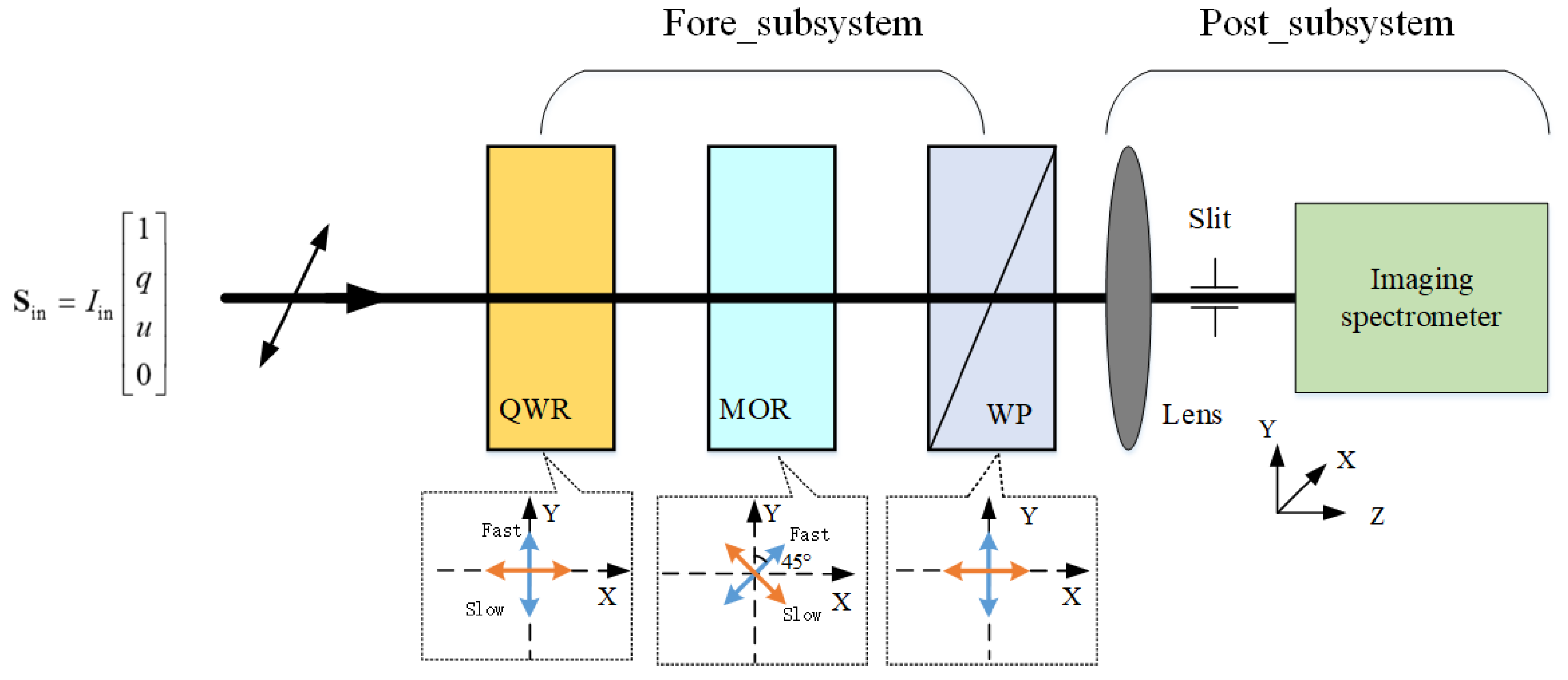
2.1.1. Instrument Configuration
2.1.2. Radiometric Model
2.2. Calibration Methods of UVISP
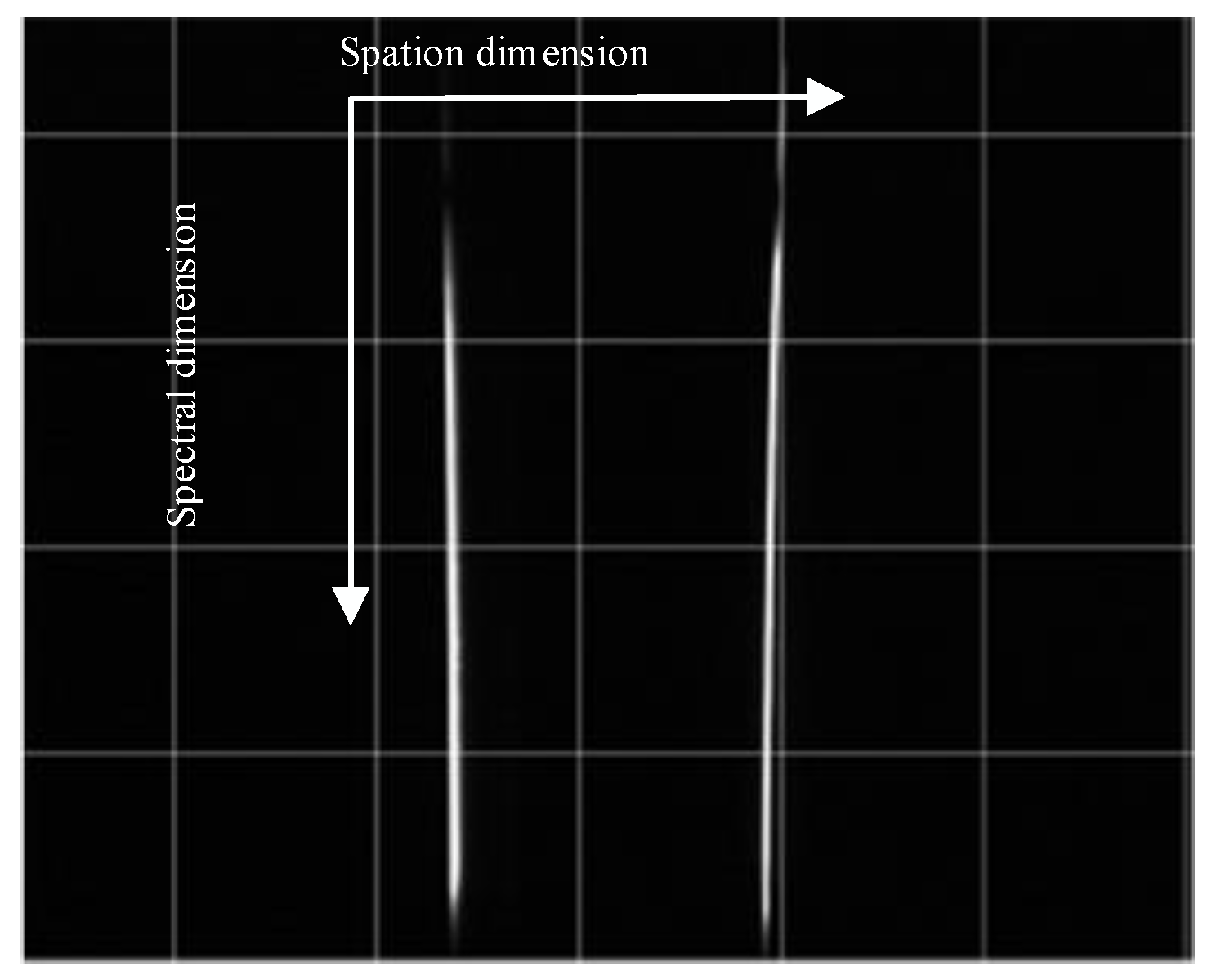
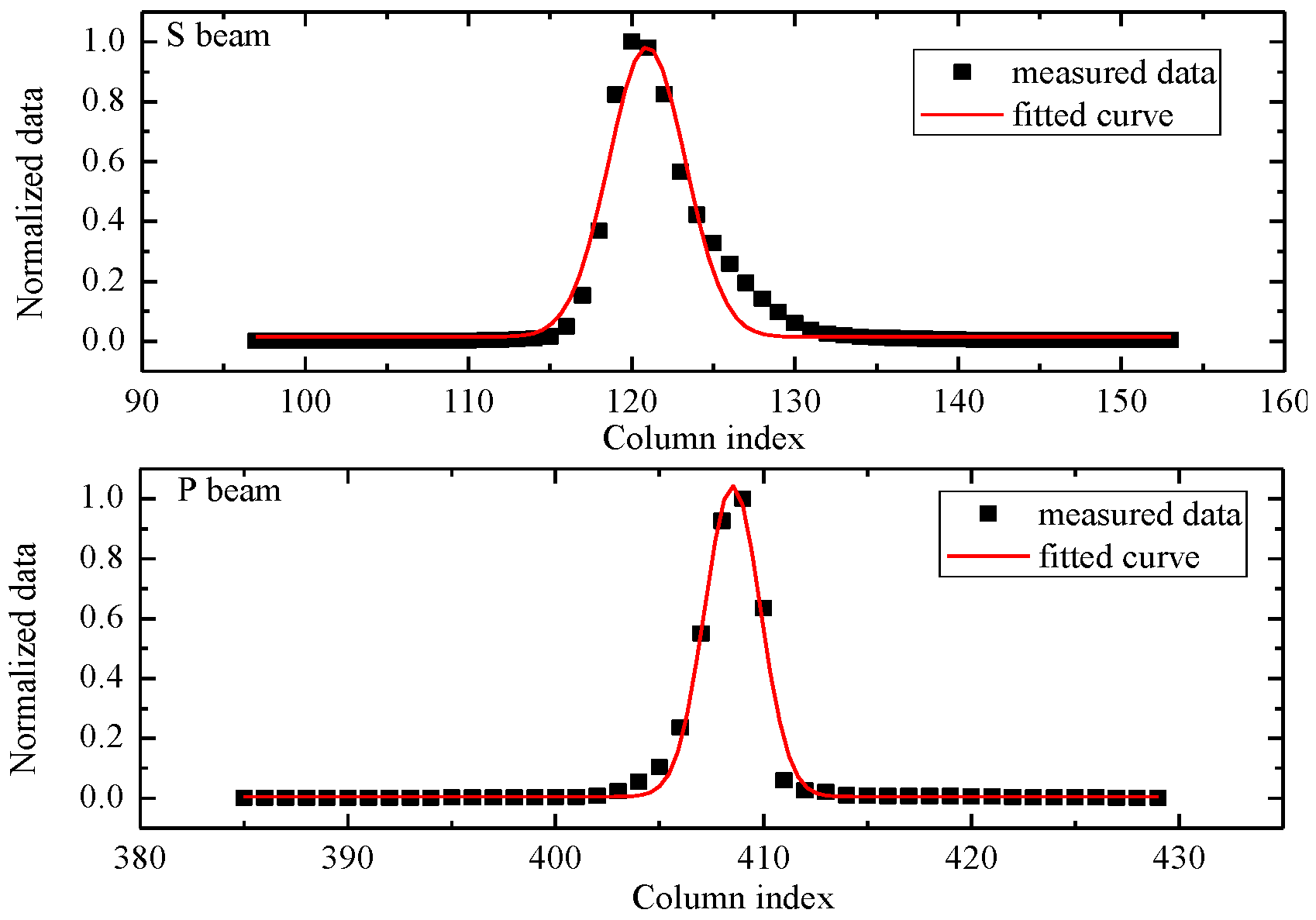
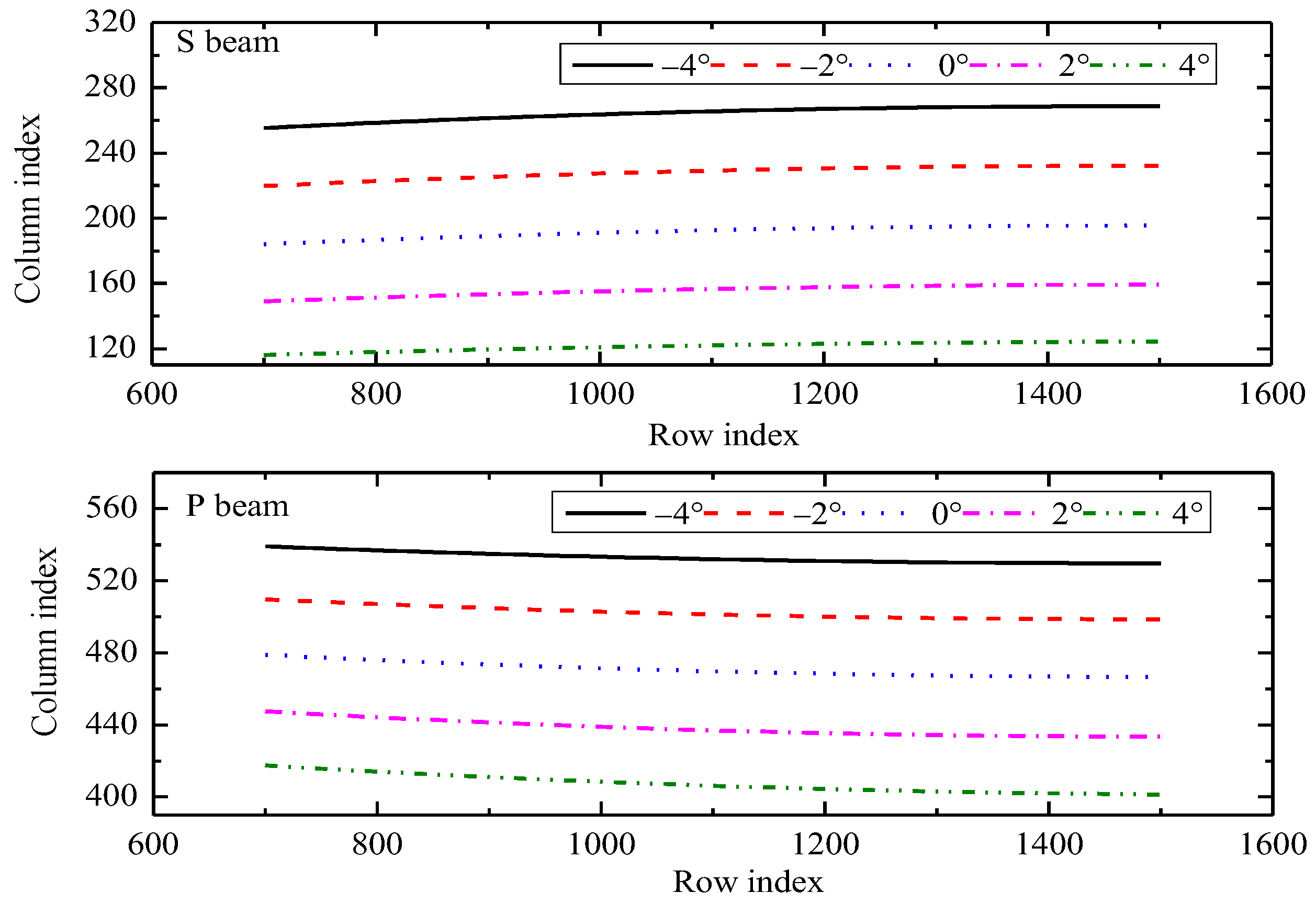
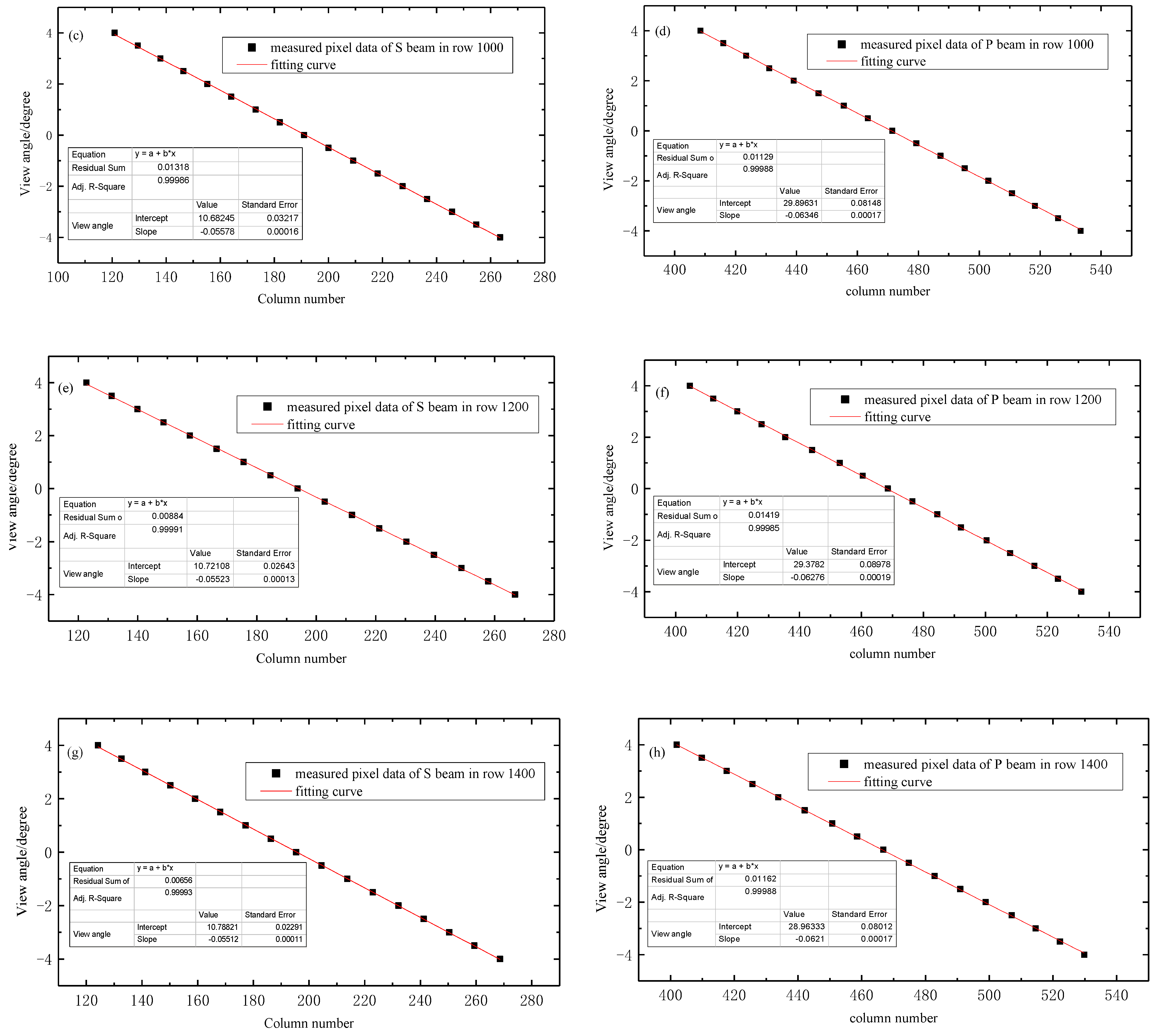
2.2.1. Geometric Calibration Principle
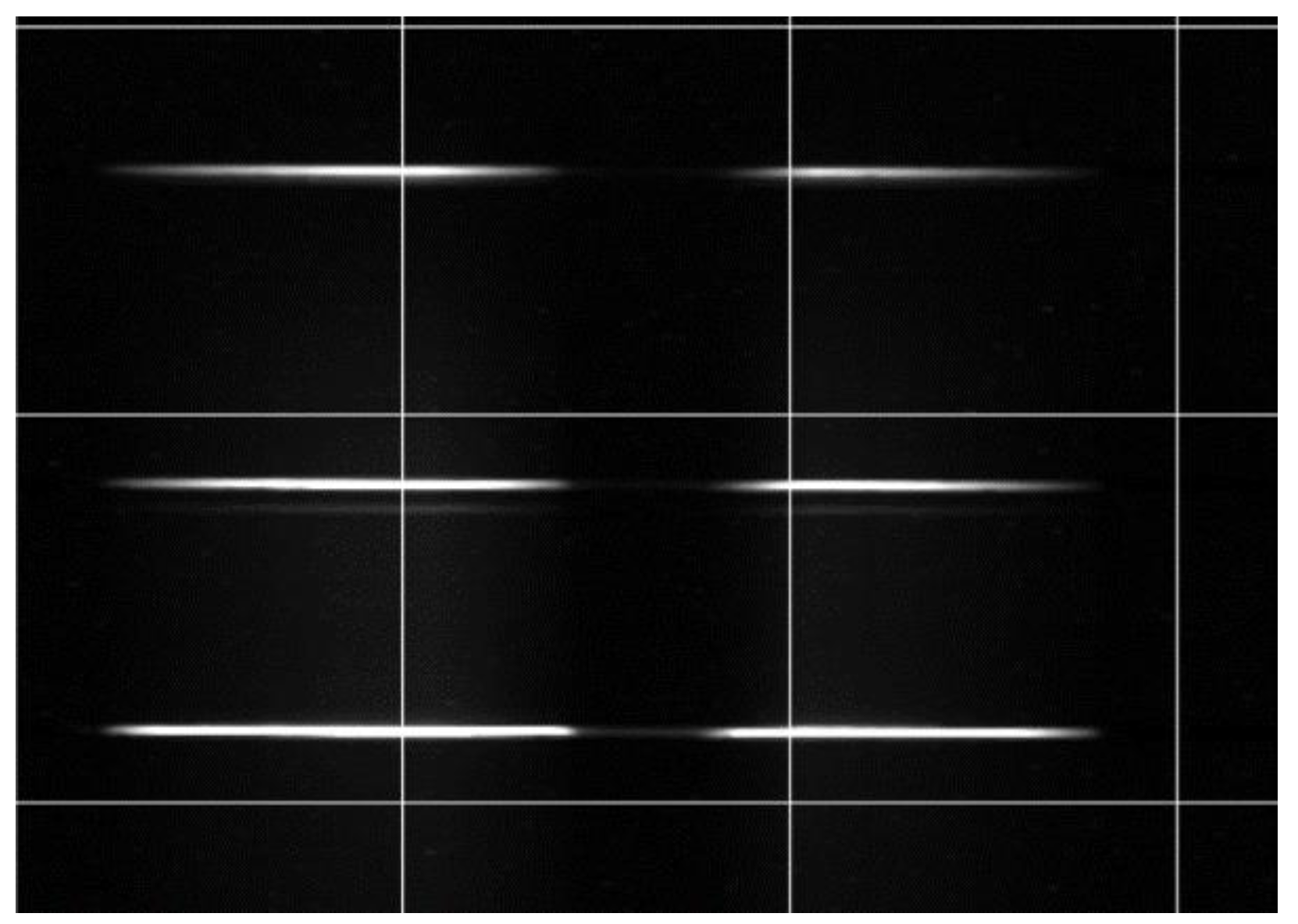
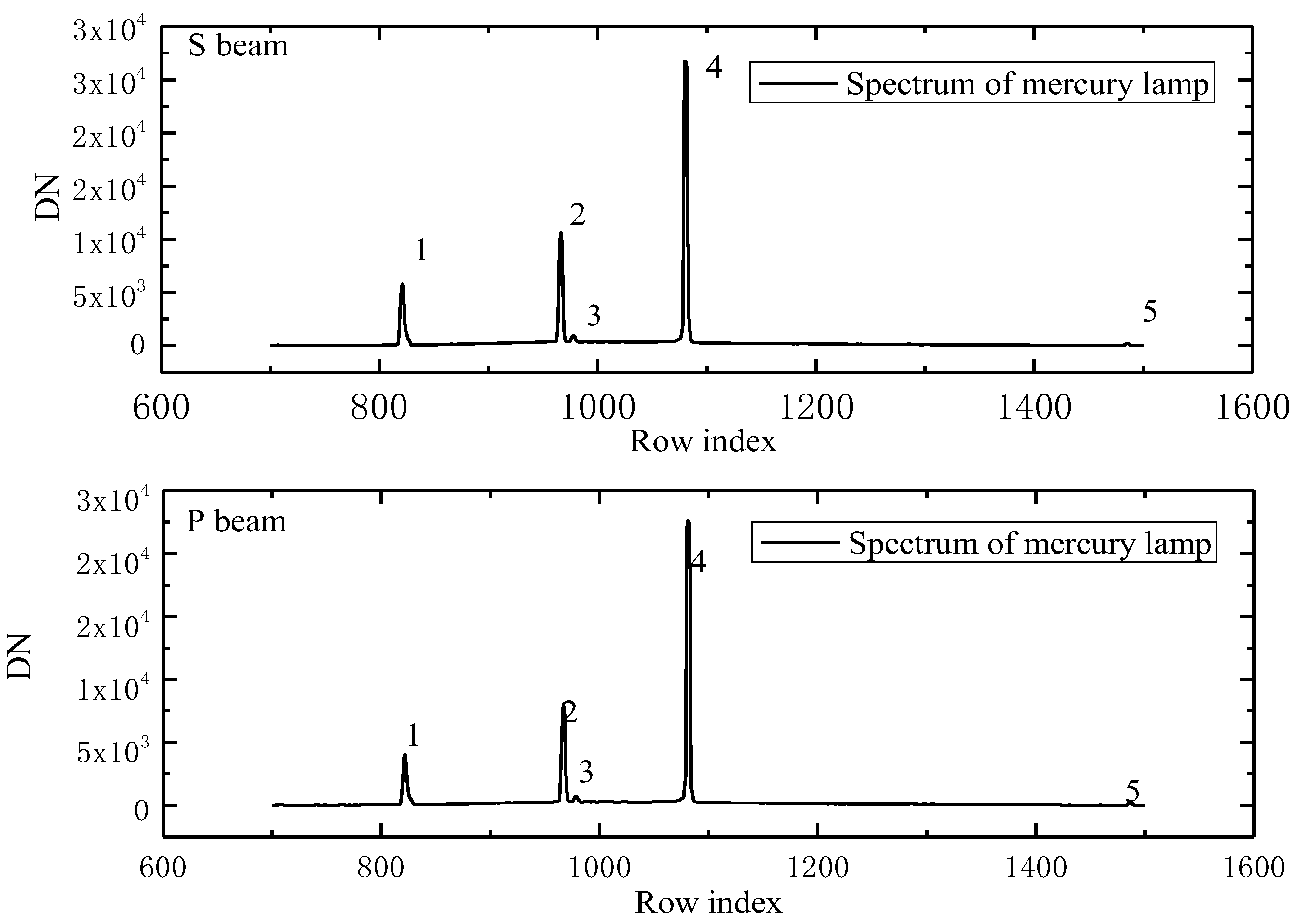
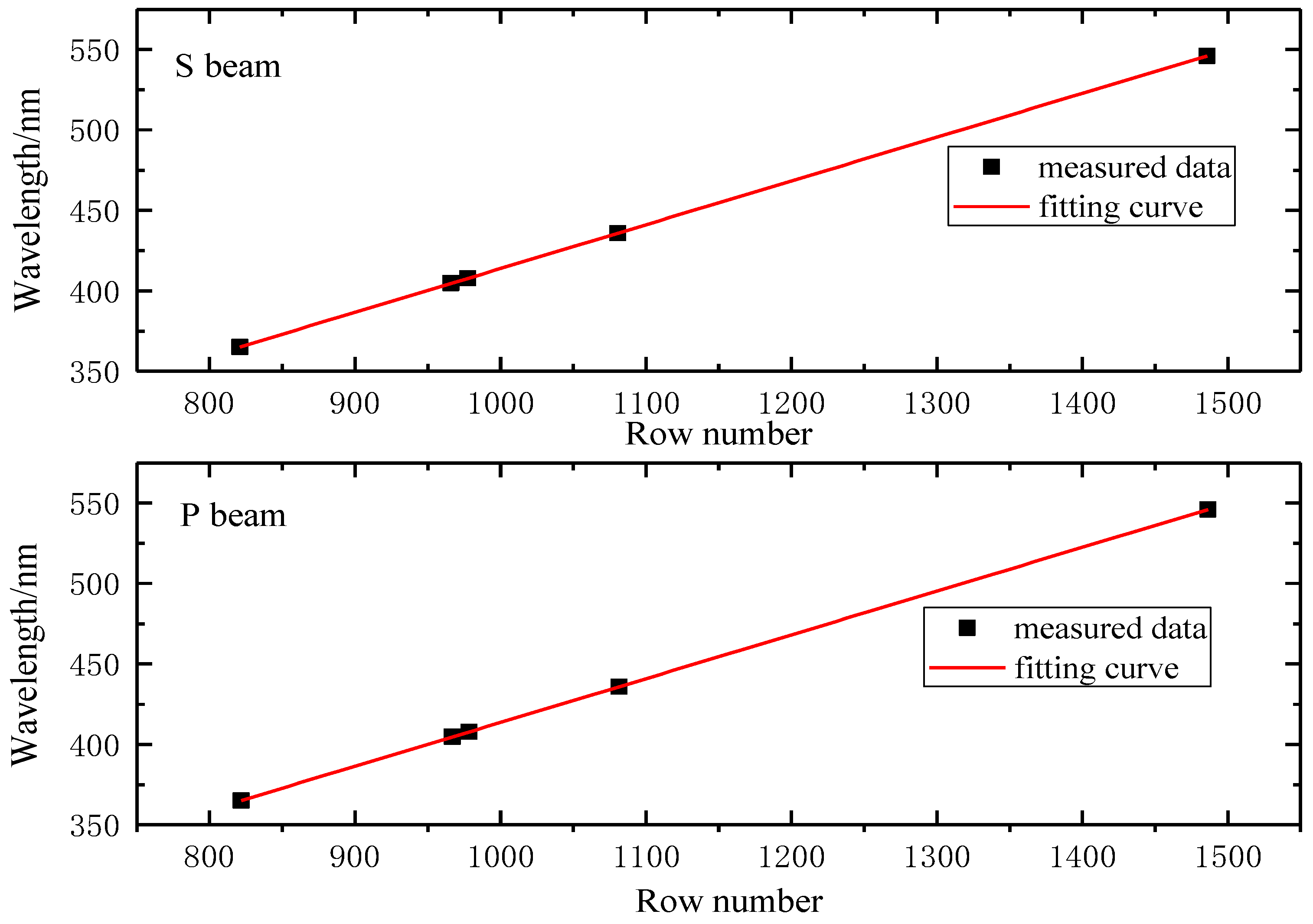
2.2.2. Spectral Calibration Principle and Spectral Matching
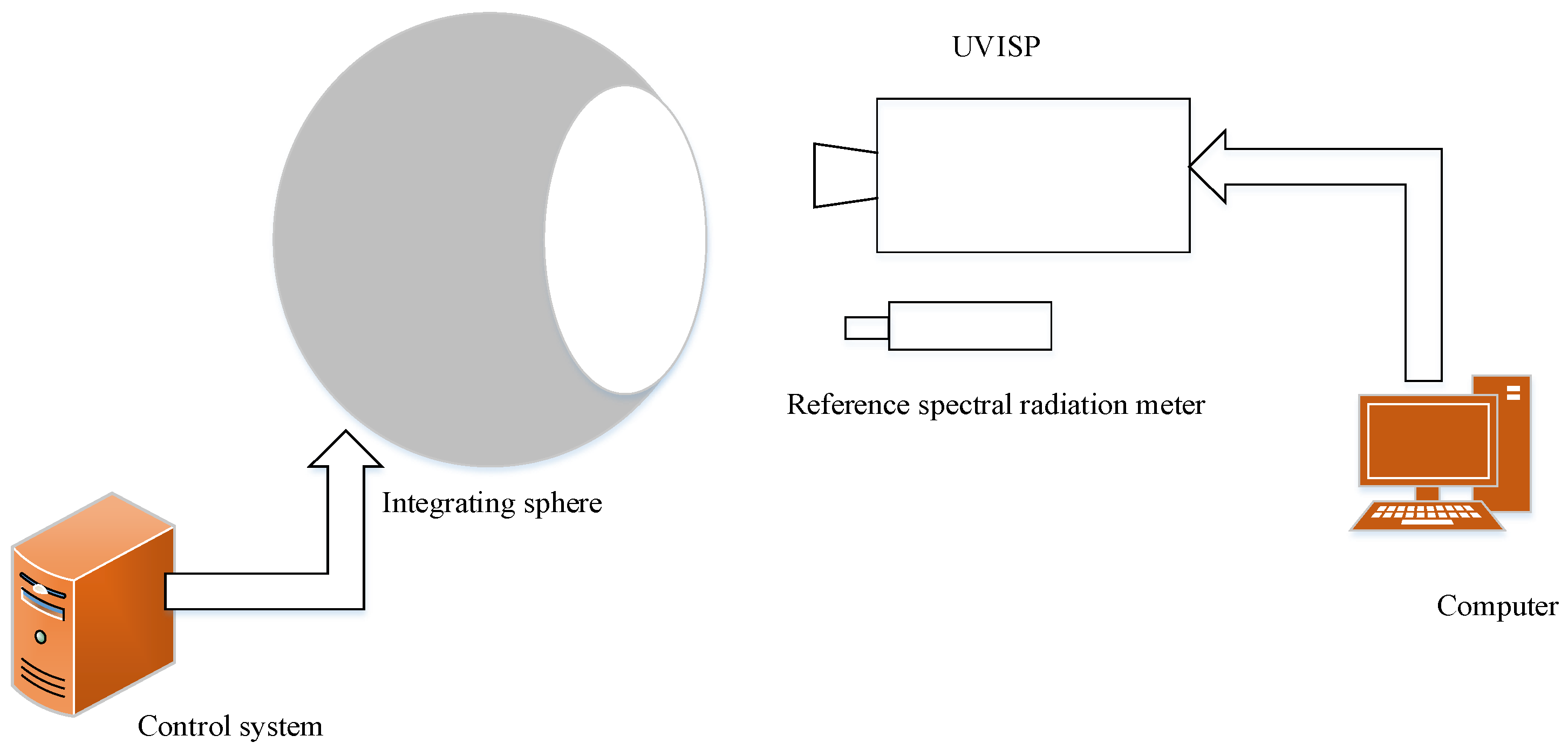
2.2.3. Radiometric Calibration Principle
2.2.4. Polarimetric Calibration Principle
2.3. Demodulation Method
3. Results and Analysis
3.1. Geometric Calibration
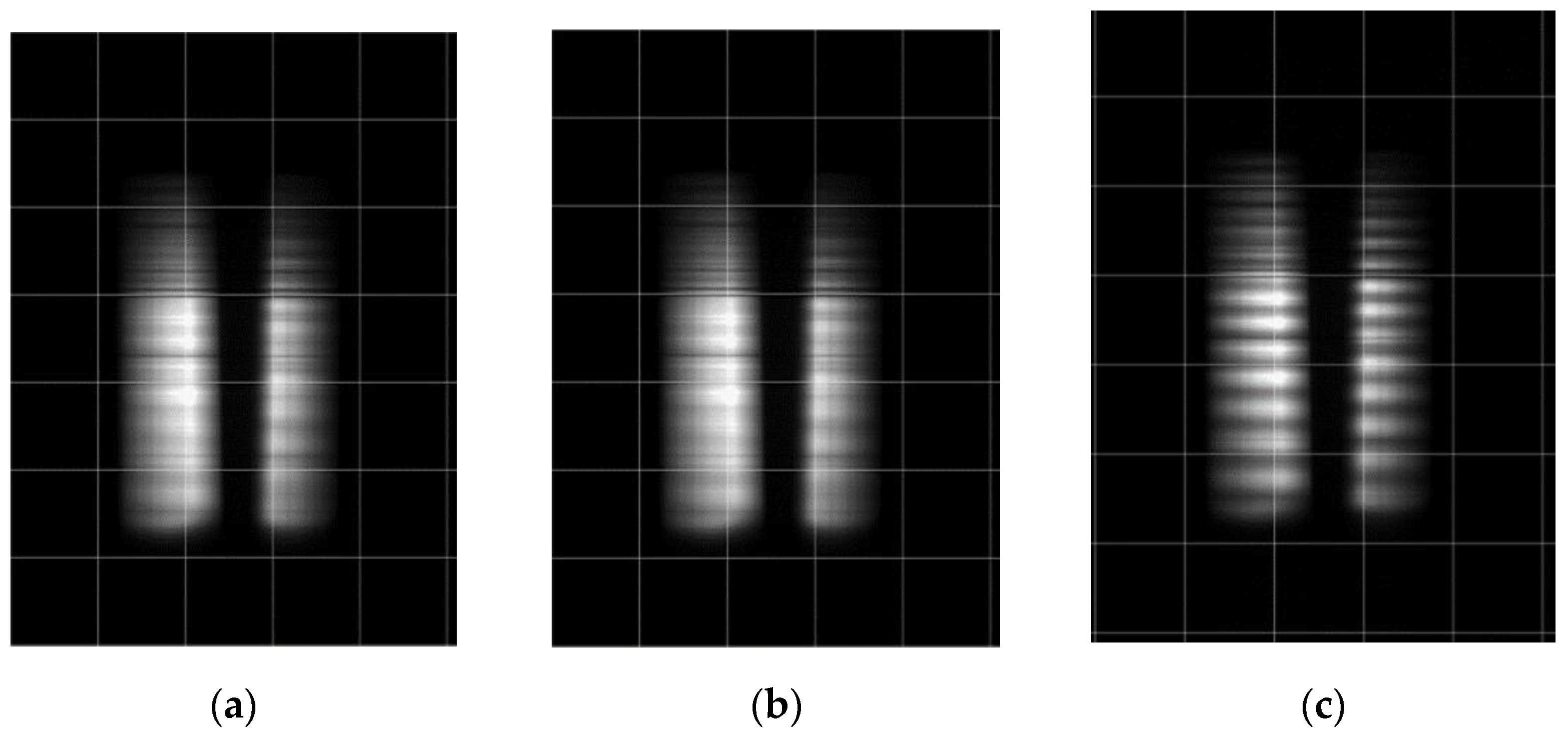
3.2. Spectral Calibration
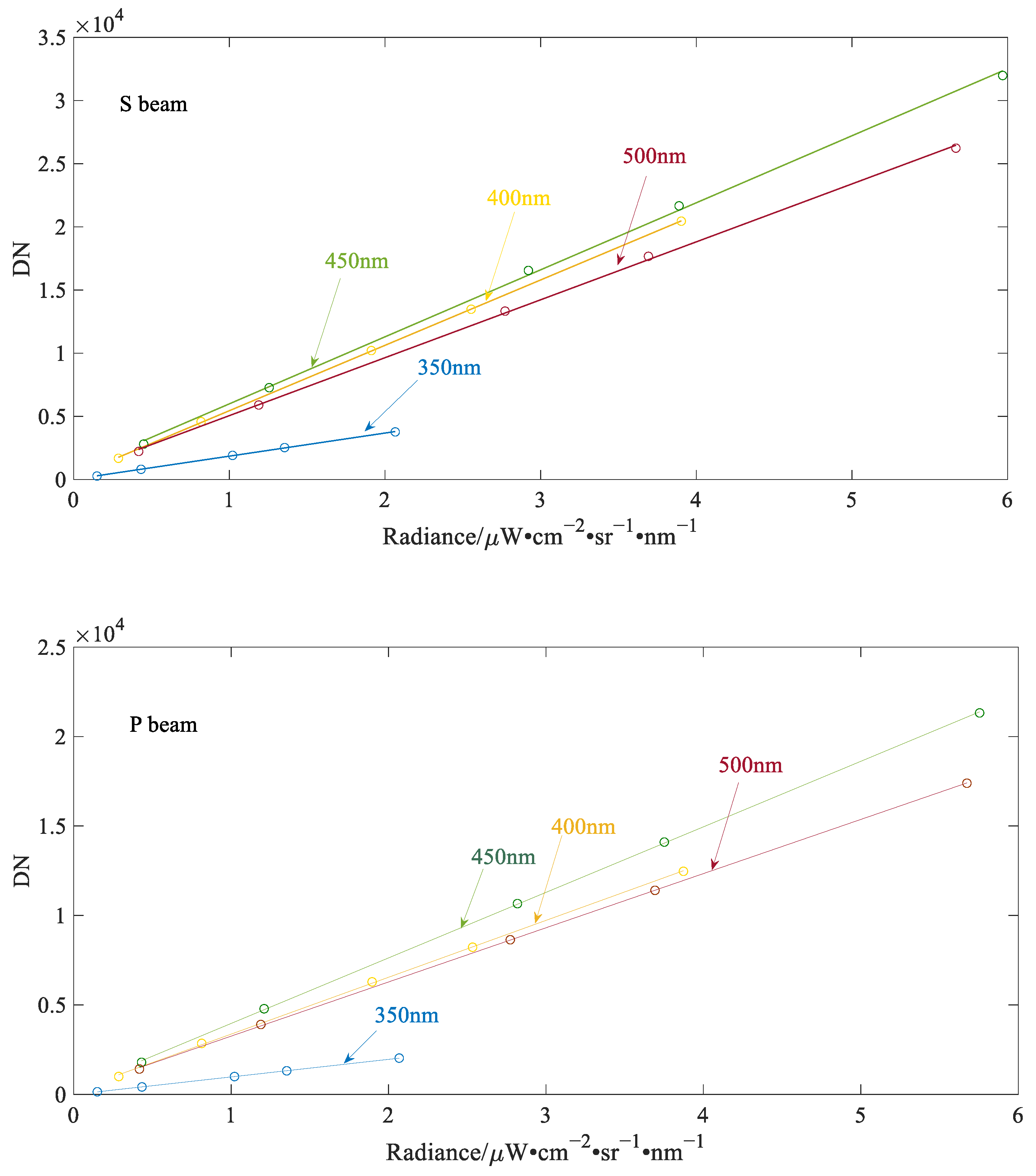
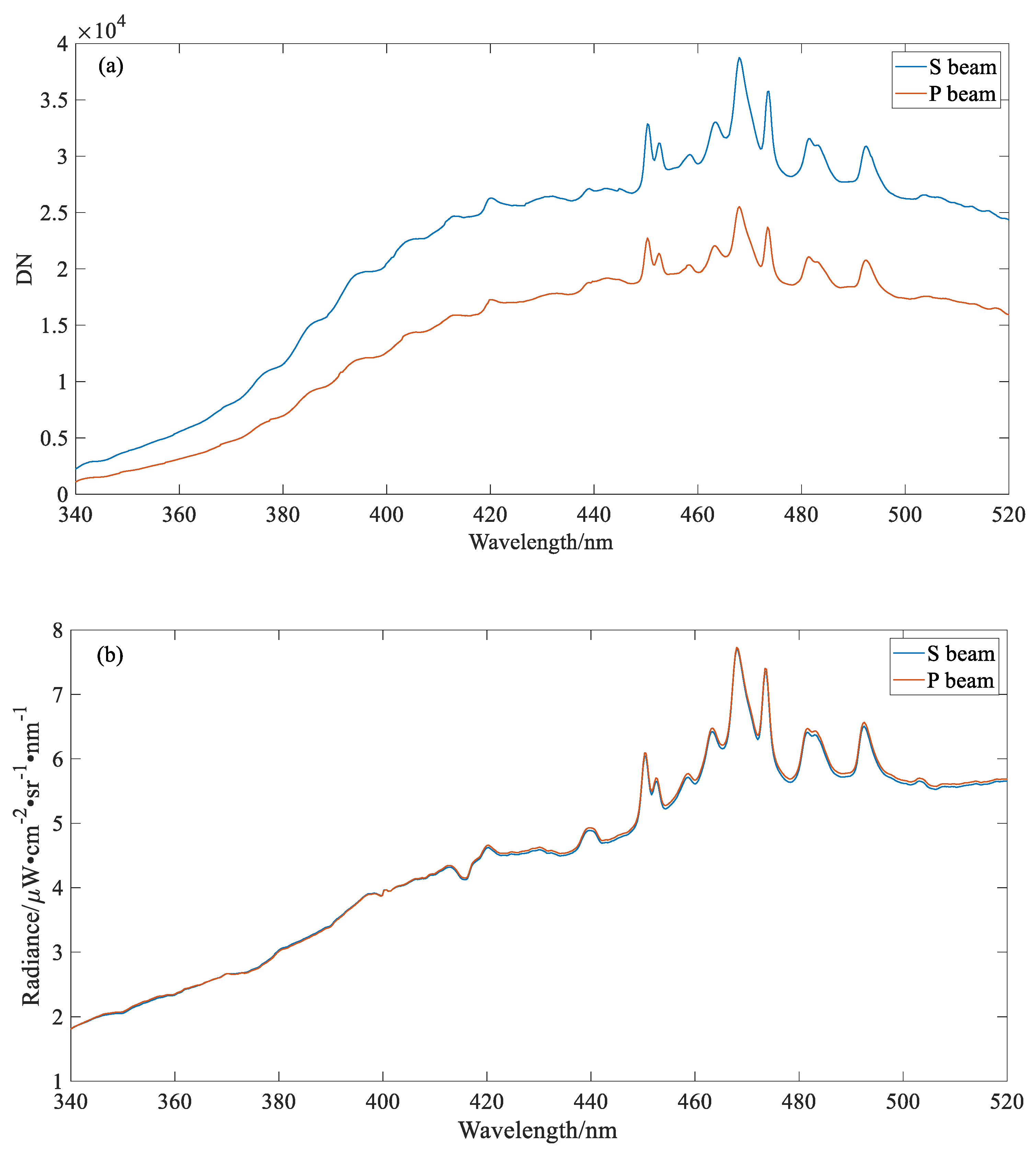
3.3. Radiometric Calibration
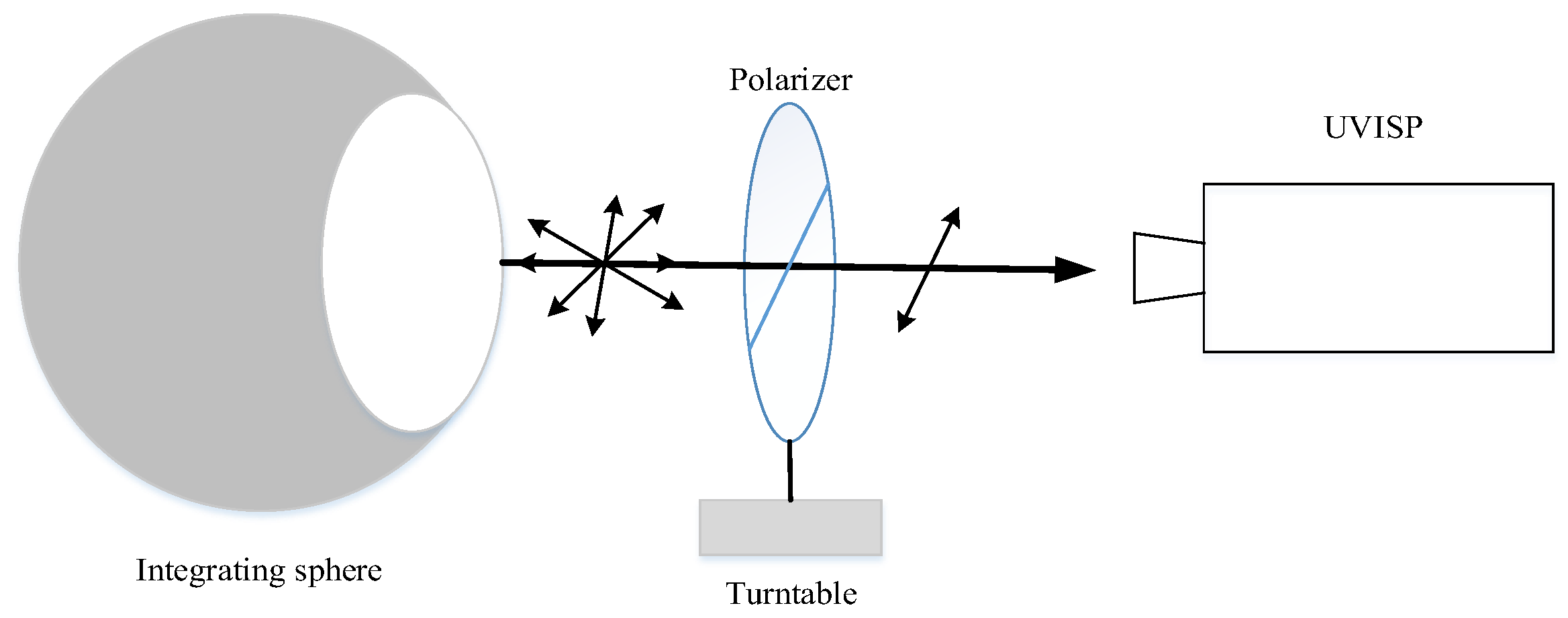
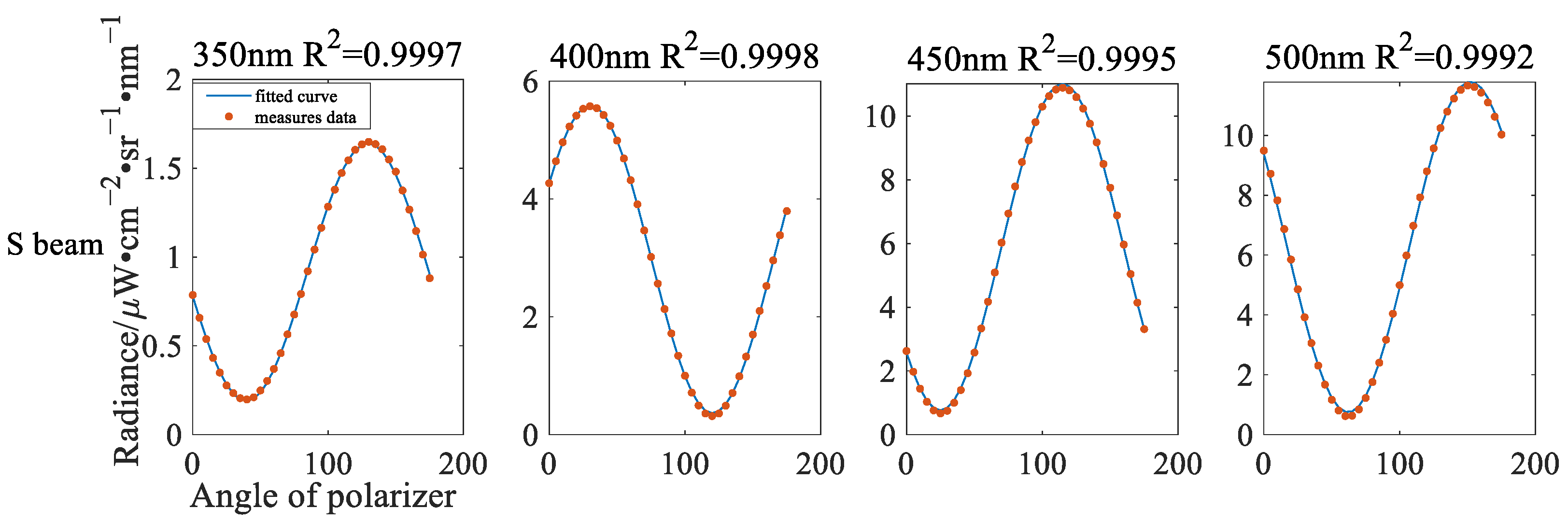
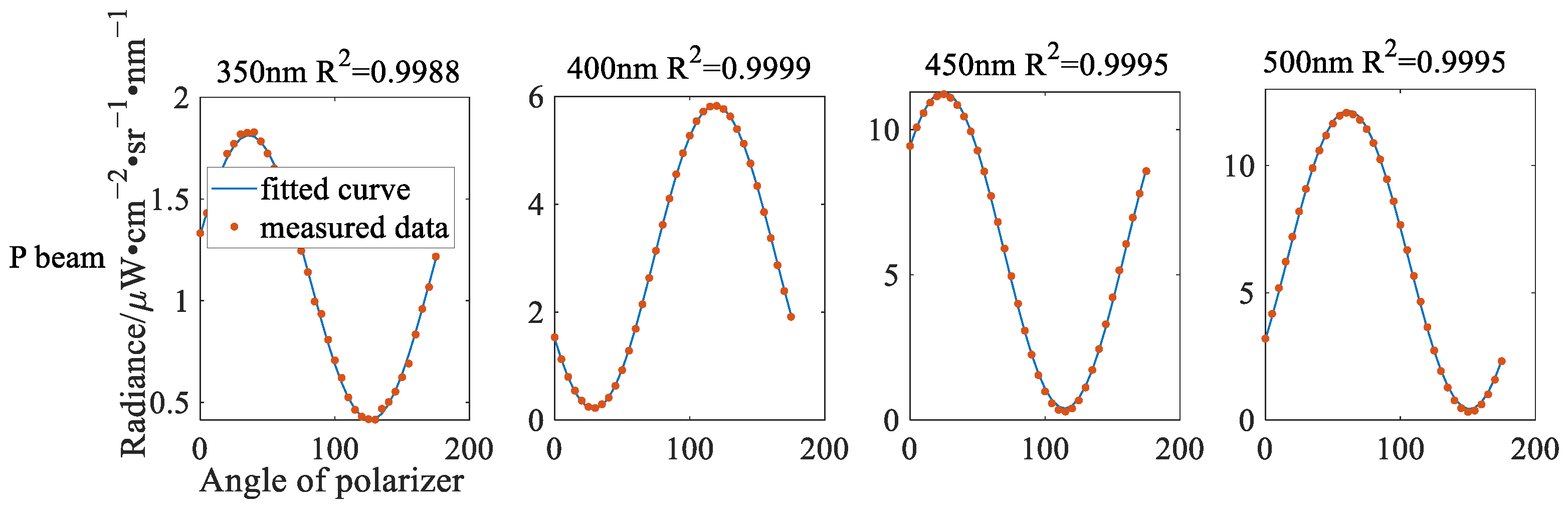
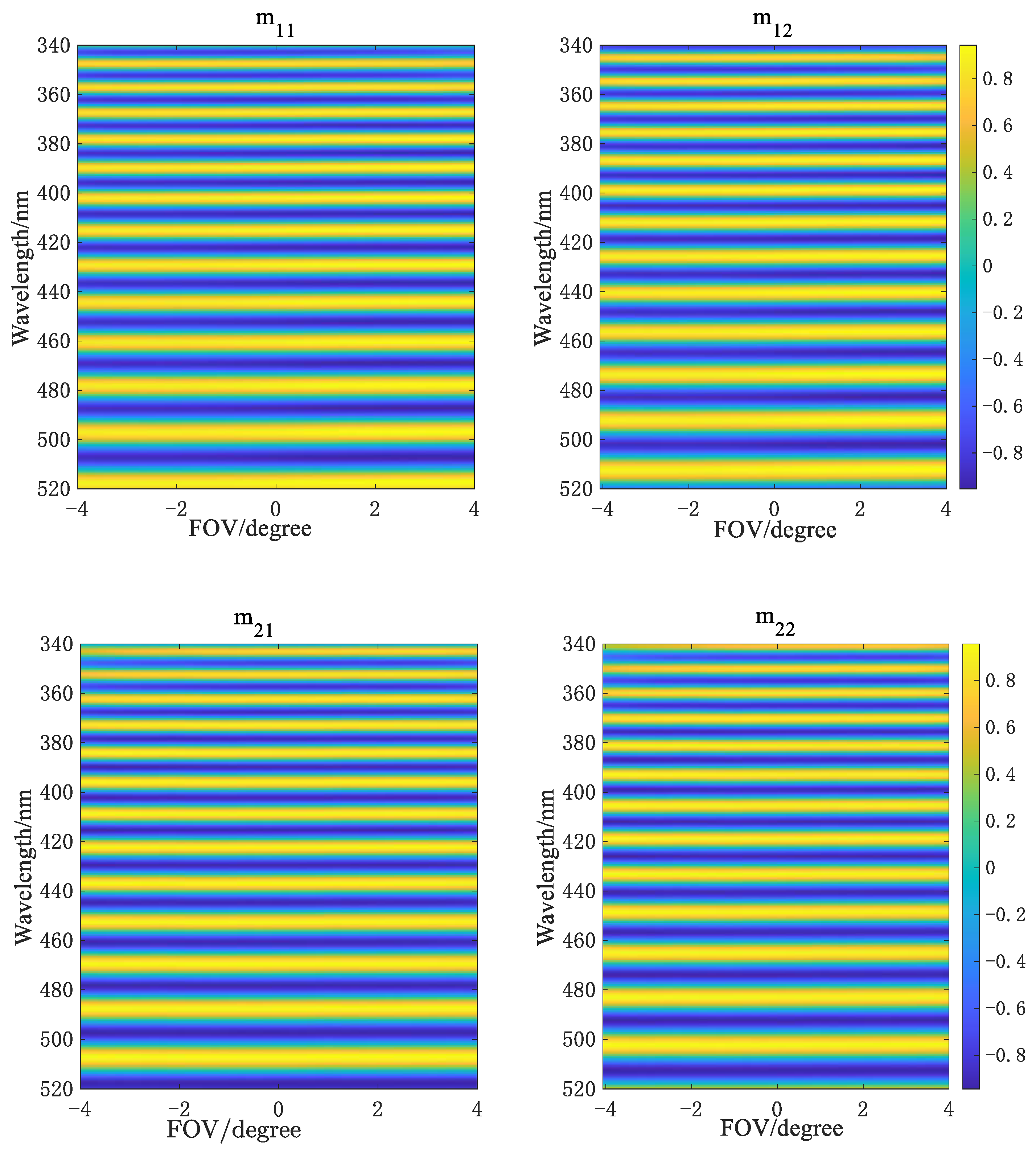
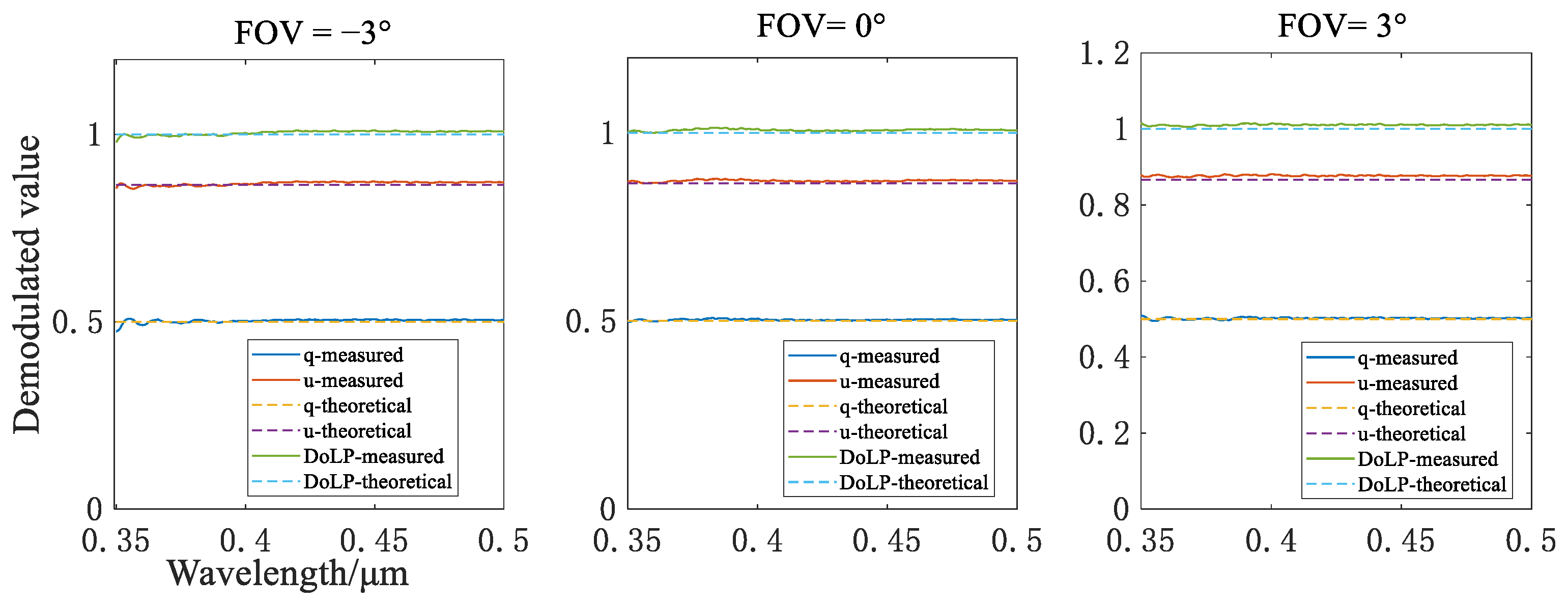
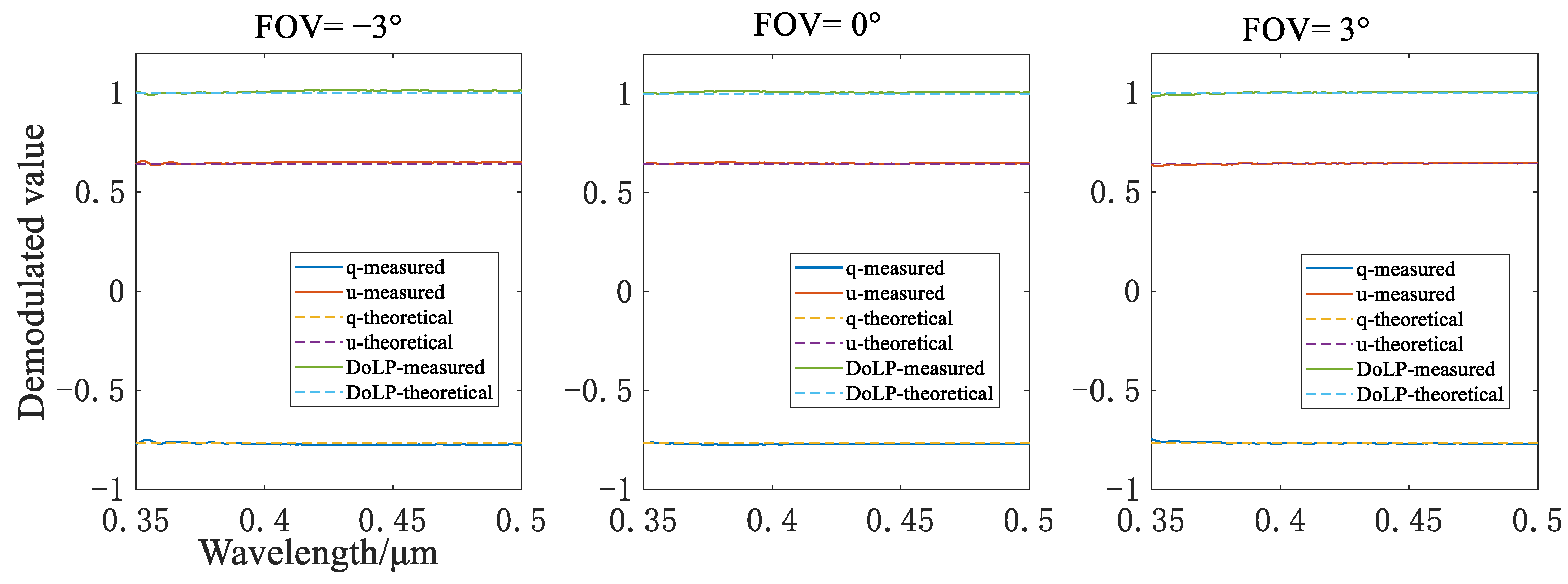
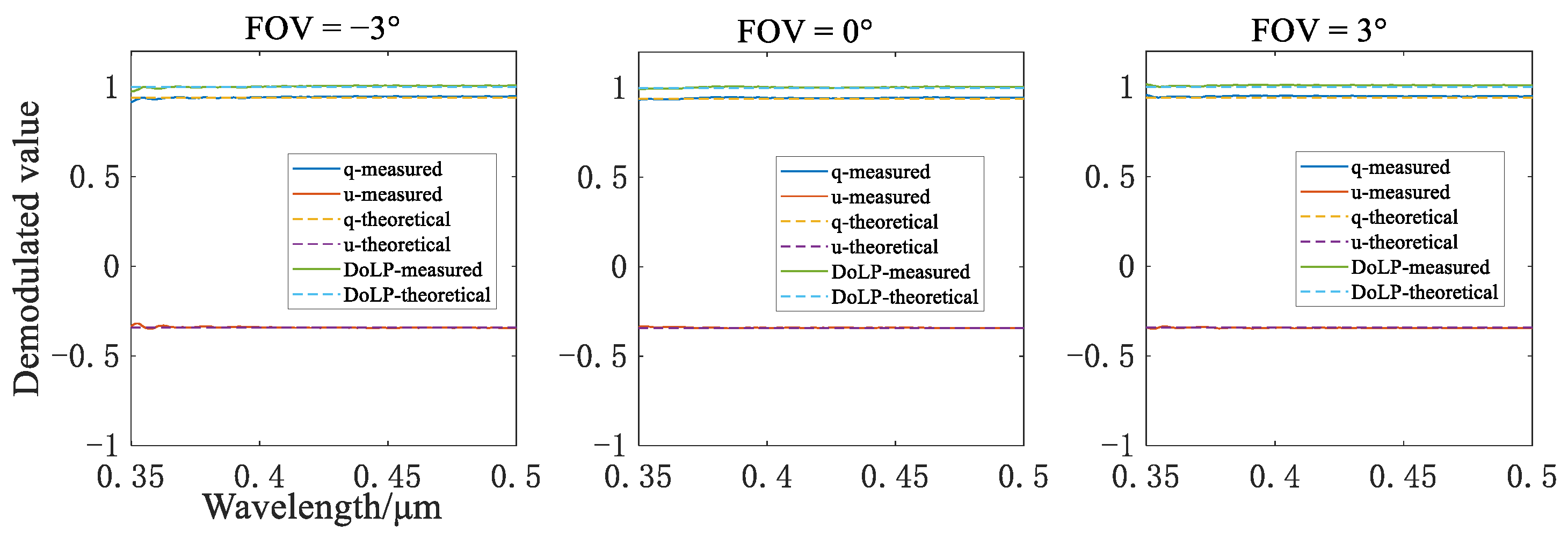
3.4. Polarimetric Calibration
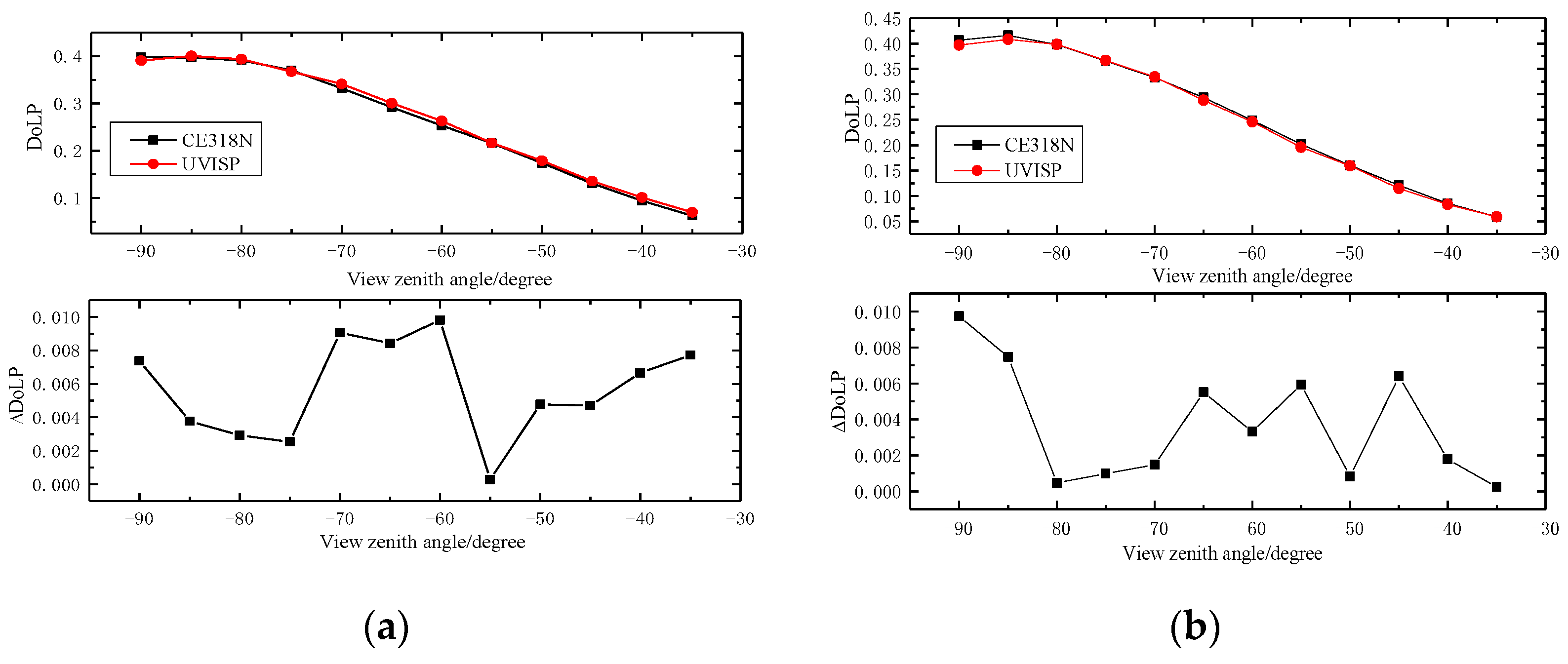
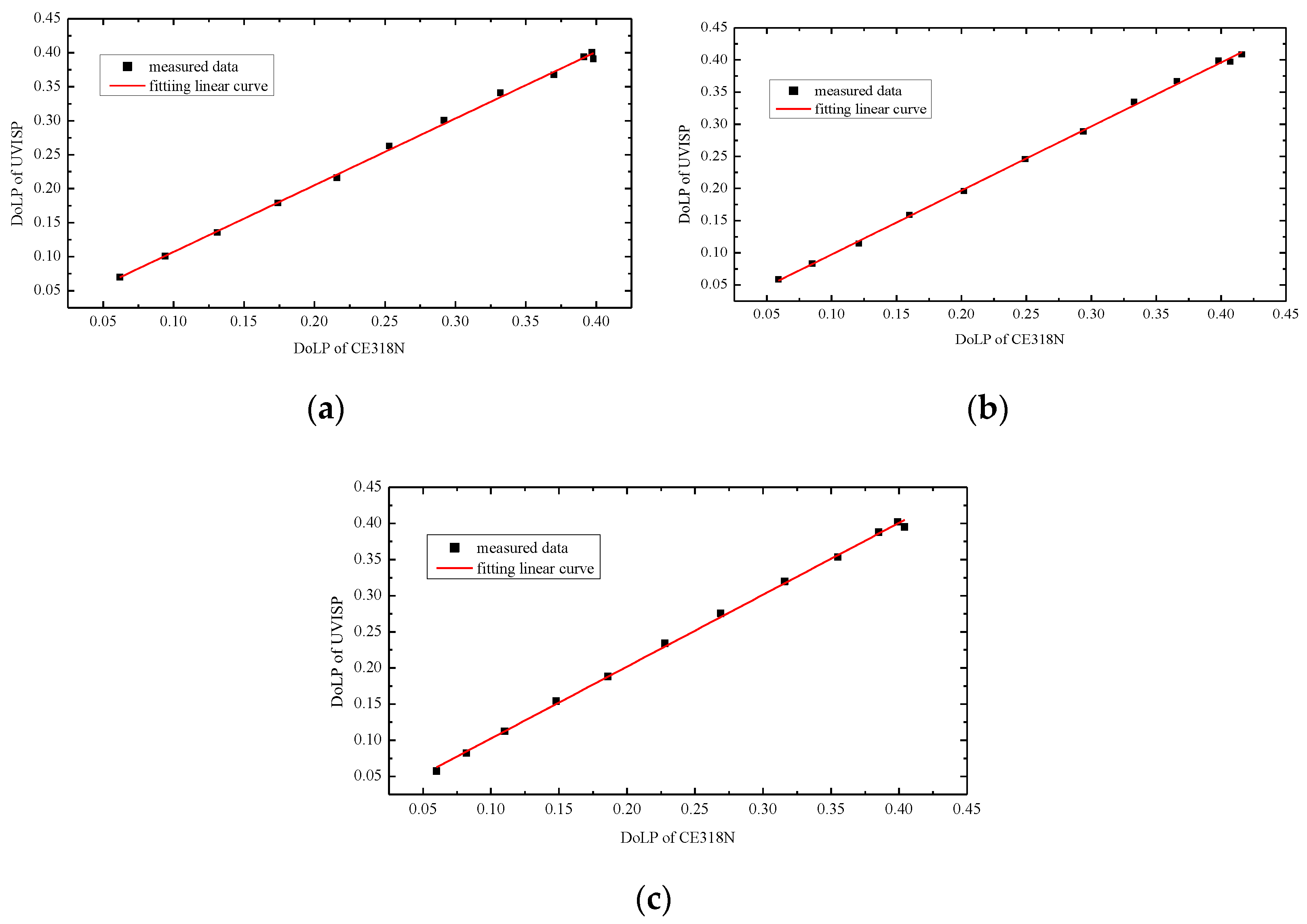
3.5. Field Measurements
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tyo, J.S.; Goldstein, D.L.; Chenault, D.B.; Shaw, J.A. Review of passive imaging polarimetry for remote sensing applications. Appl. Opt. 2006, 45, 5453–5469. [Google Scholar] [CrossRef] [PubMed]
- Van Harten, G.; de Boer, J.; Rietjens, J.H.H.; Di Noia, A.; Snik, F.; Volten, H.; Smit, J.M.; Hasekamp, O.P.; Henzing, J.S.; Keller, C.U. Atmospheric aerosol characterization with a ground-based SPEX spectropolarimetric instrument. Atmos. Meas. Tech. 2014, 7, 4341–4351. [Google Scholar] [CrossRef]
- Meng, X.; Li, J.; Liu, D.; Zhu, R. Fourier transform imaging spectropolarimeter using simultaneous polarization modulation. Opt. Lett. 2013, 38, 778–780. [Google Scholar] [CrossRef]
- Mu, T.; Pacheco, S.; Chen, Z.; Zhang, C.; Liang, R. Snapshot linear-Stokes imaging spectropolarimeter using division-of-focal-plane polarimetry and integral field spectroscopy. Sci. Rep. 2017, 7, 42115. [Google Scholar] [CrossRef]
- Diner, D.; Chipman, R.; Beaudry, N.; Cairns, B.; Foo, L.; Macenka, S.; Cunningham, T.; Seshadri, S.; Keller, C. An Integrated Multiangle, Multispectral, and Polarimetric Imaging Concept for Aerosol Remote Sensing from Space; SPIE: Bellingham, WA, USA, 2005; Volume 5659. [Google Scholar]
- Pust, N.J.; Shaw, J.A. Wavelength dependence of the degree of polarization in cloud-free skies: Simulations of real environments. Opt. Express 2012, 20, 15559–15568. [Google Scholar] [CrossRef] [PubMed]
- Okabe, H.; Hayakawa, M.; Naito, H.; Taniguchi, A.; Oka, K. Spectroscopic polarimetry using channeled spectroscopic polarization state generator (CSPSG). Opt. Express 2007, 15, 3093–3109. [Google Scholar] [CrossRef]
- Okabe, H.; Matoba, K.; Hayakawa, M.; Taniguchi, A.; Oka, K.; Naito, H.; Nakatsuka, N. New Configuration of Channeled Spectropolarimeter for Snapshot Polarimetric Measurement of Materials; SPIE: Bellingham, WA, USA, 2005; Volume 5878. [Google Scholar]
- Zhao, Y.; Zhang, L.; Pan, Q. Spectropolarimetric imaging for pathological analysis of skin. Appl. Opt. 2009, 48, D236–D246. [Google Scholar] [CrossRef]
- Rivet, S.; Dubreuil, M.; Bradu, A.; Le Grand, Y. Fast spectrally encoded Mueller optical scanning microscopy. Sci. Rep. 2019, 9, 3972. [Google Scholar] [CrossRef]
- Nordsieck, K.H. A Simple Polarimetric System for the Lick Observatory Image-Tube Scanner. Publ. Astron. Soc. Pac. 1974, 86, 324. [Google Scholar] [CrossRef]
- Oka, K.; Kato, T. Spectroscopic polarimetry with a channeled spectrum. Opt. Lett. 1999, 24, 1475–1477. [Google Scholar] [CrossRef]
- Iannarilli, F.; Jones, S.; Scott, H.; Kebabian, P. Polarimetric-Spectral Intensity Modulation (P-SIM): Enabling Simultaneous Hyperspectral and Polarimetric Imaging; SPIE: Bellingham, WA, USA, 1999; Volume 3698. [Google Scholar]
- Li, J.; Gao, B.; Qi, C.; Zhu, J.; Hou, X. Tests of a compact static Fourier-transform imaging spectropolarimeter. Opt. Express 2014, 22, 13014–13021. [Google Scholar] [CrossRef] [PubMed]
- Quan, N.; Zhang, C.; Mu, T. Static Fourier transform imaging spectropolarimeter based on quarter-wave plate array. Optik 2016, 127, 9763–9774. [Google Scholar] [CrossRef]
- LaCasse, C.F.; Craven, J.M.; Lowenstern, M.E.; Kudenov, M.W. Field deployable pushbroom hyperspectral imaging polarimeter. Opt. Eng. 2017, 56, 1. [Google Scholar] [CrossRef]
- Jones, S.; Iannarilli, F.; Kebabian, P. Realization of quantitative-grade fieldable snapshot imaging spectropolarimeter. Opt. Express 2004, 12, 6559–6573. [Google Scholar] [CrossRef]
- Shaw, J.A.; Hagen, N.; Tyo, J.S.; Dereniak, E.L.; Sass, D.T. Visible snapshot imaging spectro-polarimeter. In Polarization Science and Remote Sensing II; SPIE: Bellingham, WA, USA, 2005; Volume 5888. [Google Scholar]
- LaCasse, C.F.; Chipman, R.A.; Tyo, J.S. Band limited data reconstruction in modulated polarimeters. Opt. Express 2011, 19, 14976–14989. [Google Scholar] [CrossRef]
- Lee, D.J.; LaCasse, C.F.; Craven, J.M. Compressed channeled spectropolarimetry. Opt. Express 2017, 25, 32041–32063. [Google Scholar] [CrossRef]
- Kudenov, C.M.W. False signature reduction in channeled spectropolarimetry. Opt. Eng. 2010, 49, 053602. [Google Scholar]
- Kadowaki, N.; Moon, S.G.; ter Horst, R.; Keller, C.U.; Voors, R.; Wielinga, K.; Navarro, R.; Laan, E.C.; Verlaan, A.L.; van Harten, G.; et al. SPEX: The Spectropolarimeter for Planetary Exploration. In International Conference on Space Optics—ICSO 2010; SPIE: Bellingham, WA, USA, 2010; Volume 105651C. [Google Scholar] [CrossRef]
- Meynart, R.; Voors, R.; Neeck, S.P.; Moon, S.G.; Hannemann, S.; Shimoda, H.; Rietjens, J.H.H.; van Harten, G.; Snik, F.; Smit, M.; et al. Spectropolarimeter for planetary exploration (SPEX): Performance measurements with a prototype. In Sensors, Systems, and Next-Generation Satellites XV; SPIE: Bellingham, WA, USA, 2011; Volume 8176. [Google Scholar] [CrossRef]
- Smit, J.M.; Rietjens, J.H.H.; di Noia, A.; Hasekamp, O.P.; Laauwen, W.; Cairns, B.; van Diedenhoven, B.; Wasilewski, A.; Karafolas, N.; Sodnik, Z.; et al. In-flight validation of SPEX airborne spectro-polarimeter onboard NASA’s research aircraft ER-2. In International Conference on Space Optics—ICSO 2018; SPIE: Bellingham, WA, USA, 2019; Volume 11180. [Google Scholar] [CrossRef]
- Rietjens, J.H.H.; Campo, J.; Chanumolu, A.; Smit, M.; Nalla, R.; Fernandez, C.V.; Dingjan, J.; van Amerongen, A.; Hasekamp, O.P.; Snik, F.; et al. Expected performance and error analysis for SPEXone, a multi-angle channeled spectropolarimeter for the NASA PACE mission. In Polarization Science and Remote Sensing IX; SPIE: Bellingham, WA, USA, 2019. [Google Scholar] [CrossRef]
- Goldstein, D.H.; Chenault, D.B.; Wu, D.L.; Chipman, R.A.; Hart, K. Compact LWIR polarimeter for cirrus ice properties. In Polarization: Measurement, Analysis, and Remote Sensing XIII; SPIE: Bellingham, WA, USA, 2018. [Google Scholar] [CrossRef]
- Hart, K. Linear Stokes measurement of thermal targets using compact LWIR spectropolarimeter. In Polarization: Measurement, Analysis, and Remote Sensing XIV; SPIE: Bellingham, WA, USA, 2020. [Google Scholar] [CrossRef]
- DeLeon, C.M.; Heath, J.; Espinosa, W.R.; Wu, D.; Kupinski, M.; Snik, F.; Kupinski, M.K.; Shaw, J.A. UV linear stokes imaging of optically thin clouds. In Polarization Science and Remote Sensing X; SPIE: Bellingham, WA, USA, 2021. [Google Scholar] [CrossRef]
- Olson, M.R.; Yuqin, W.; de Foy, B.; Li, Z.; Bergin, M.H.; Zhang, Y.; Schauer, J.J. Source attribution of black and Brown carbon near-UV light absorption in Beijing, China and the impact of regional air-mass transport. Sci. Total Environ. 2022, 807, 150871. [Google Scholar] [CrossRef]
- Sabatke, D.S.; Locke, A.M.; Dereniak, E.L.; McMillan, R.W. Linear operator theory of channeled spectropolarimetry. J. Opt. Soc. Am. A 2005, 22, 1567–1576. [Google Scholar] [CrossRef]
- Sabatke, D.S.; Locke, A.M.; Dereniak, E.L.; McMillan, R.W. Linear calibration and reconstruction techniques for channeled spectropolarimetry. Opt. Express 2003, 11, 2940–2952. [Google Scholar] [CrossRef]
- Ju, X.; Yang, B.; Yan, C.; Zhang, J.; Xing, W. Easily implemented approach for the calibration of alignment and retardation errors in a channeled spectropolarimeter. Appl. Opt. 2018, 57, 8600–8613. [Google Scholar] [CrossRef] [PubMed]
- Mu, T.; Zhang, C.; Jia, C.; Ren, W.; Zhang, L.; Li, Q. Alignment and retardance errors, and compensation of a channeled spectropolarimeter. Opt. Commun. 2013, 294, 88–95. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, J.; Yan, C.; Ju, X. Methods of polarimetric calibration and reconstruction for a fieldable channeled dispersive imaging spectropolarimeter. Appl. Opt. 2017, 56, 8477. [Google Scholar] [CrossRef] [PubMed]
- Xing, W.; Ju, X.; Yan, C.; Yang, B.; Zhang, J. Self-correction of alignment errors and retardations for a channeled spectropolarimeter. Appl. Opt. 2018, 57, 7857–7864. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, C.; Yan, T.; Wei, Y. Polarization state demodulation of channeled imaging spectropolarimeter by phase rearrangement calibration method. Opt. Commun. 2016, 379, 54–63. [Google Scholar] [CrossRef]
- Van Harten, G.; Snik, F.; Rietjens, J.H.H.; Smit, J.M.; de Boer, J.; Diamantopoulou, R.; Hasekamp, O.P.; Stam, D.M.; Keller, C.U.; Laan, E.C.; et al. Prototyping for the Spectropolarimeter for Planetary EXploration (SPEX): Calibration and sky measurements. In Polarization Science and Remote Sensing V; SPIE: Bellingham, WA, USA, 2011; Volume 8160. [Google Scholar] [CrossRef]
- Smit, J.M.; Rietjens, J.H.H.; van Harten, G.; Di Noia, A.; Laauwen, W.; Rheingans, B.E.; Diner, D.J.; Cairns, B.; Wasilewski, A.; Knobelspiesse, K.D.; et al. SPEX airborne spectropolarimeter calibration and performance. Appl. Opt. 2019, 58, 5695–5719. [Google Scholar] [CrossRef]
- Hart, K.; Kupinski, M.; Wu, D.; Chipman, R. First results from an uncooled LWIR polarimeter for cubesat deployment. Opt. Eng. 2020, 59, 075103. [Google Scholar] [CrossRef]
- Xing, W.; Ju, X.; Bo, J.; Yan, C.; Yang, B.; Xu, S.; Zhang, J. Polarization Radiometric Calibration in Laboratory for a Channeled Spectropolarimeter. Appl. Sci. 2020, 10, 8295. [Google Scholar] [CrossRef]
- Snik, F.; Karalidi, T.; Keller, C.U. Spectral modulation for full linear polarimetry. Appl. Opt. 2009, 48, 1337–1346. [Google Scholar] [CrossRef]
- Dubovik, O.; Smirnov, A.; Holben, B.N.; King, M.D.; Kaufman, Y.J.; Eck, T.F.; Slutsker, I. Accuracy assessments of aerosol optical properties retrieved from Aerosol Robotic Network (AERONET) Sun and sky radiance measurements. J. Geophys. Res. Atmos. 2000, 105, 9791–9806. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wavelength (nm) | Number of Peak Pixels | |
|---|---|---|
| S Beam | P Beam | |
| 365.02 | 820.79 | 821.72 |
| 404.66 | 966.11 | 966.93 |
| 407.78 | 977.57 | 978.42 |
| 435.83 | 1080.59 | 1081.42 |
| 546.07 | 1485.68 | 1486.46 |
| FOV (Deg.) | Polarizer Angle (Deg.) | q RMS Error (%) | u RMS Error (%) | DoLP RMS Error (%) |
|---|---|---|---|---|
| −3 | 30 | 0.53 | 0.61 | 0.7 |
| 70 | 0.81 | 0.68 | 1 | |
| 170 | 0.66 | 0.41 | 0.67 | |
| 0 | 30 | 0.38 | 0.73 | 0.81 |
| 70 | 0.62 | 0.61 | 0.85 | |
| 170 | 0.49 | 0.22 | 0.47 | |
| 3 | 30 | 0.3 | 1.1 | 1.1 |
| 70 | 0.42 | 0.51 | 0.51 | |
| 170 | 0.96 | 0.96 | 0.96 |
| Band (nm) | Slope | Intercept | RMS | |
|---|---|---|---|---|
| 380 | 0.981 | 0.0089 | 0.0063 | 0.998 |
| 440 | 0.995 | −0.002 | 0.0048 | 0.999 |
| 500 | 0.994 | 0.003 | 0.0046 | 0.998 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Li, M.; Hu, Y.; Wang, X.; Xu, H.; Chi, G.; Hong, J. Laboratory Calibration of an Ultraviolet–Visible Imaging Spectropolarimeter. Remote Sens. 2022, 14, 3898. https://doi.org/10.3390/rs14163898
Shi J, Li M, Hu Y, Wang X, Xu H, Chi G, Hong J. Laboratory Calibration of an Ultraviolet–Visible Imaging Spectropolarimeter. Remote Sensing. 2022; 14(16):3898. https://doi.org/10.3390/rs14163898
Chicago/Turabian StyleShi, Jingjing, Mengfan Li, Yadong Hu, Xiangjing Wang, Hua Xu, Gaojun Chi, and Jin Hong. 2022. "Laboratory Calibration of an Ultraviolet–Visible Imaging Spectropolarimeter" Remote Sensing 14, no. 16: 3898. https://doi.org/10.3390/rs14163898
APA StyleShi, J., Li, M., Hu, Y., Wang, X., Xu, H., Chi, G., & Hong, J. (2022). Laboratory Calibration of an Ultraviolet–Visible Imaging Spectropolarimeter. Remote Sensing, 14(16), 3898. https://doi.org/10.3390/rs14163898