
Validation of an Empirical Subwaveform Retracking Strategy for SAR Altimetry

 , , , , , , and
, , , , , , and 
Abstract
:1. Introduction
2. Data and Methods
2.1. Data
2.2. Methods: Retracking
2.2.1. Functional Form
2.2.2. Leading Edge Detection
2.2.3. Choice of Trailing Edge Slope
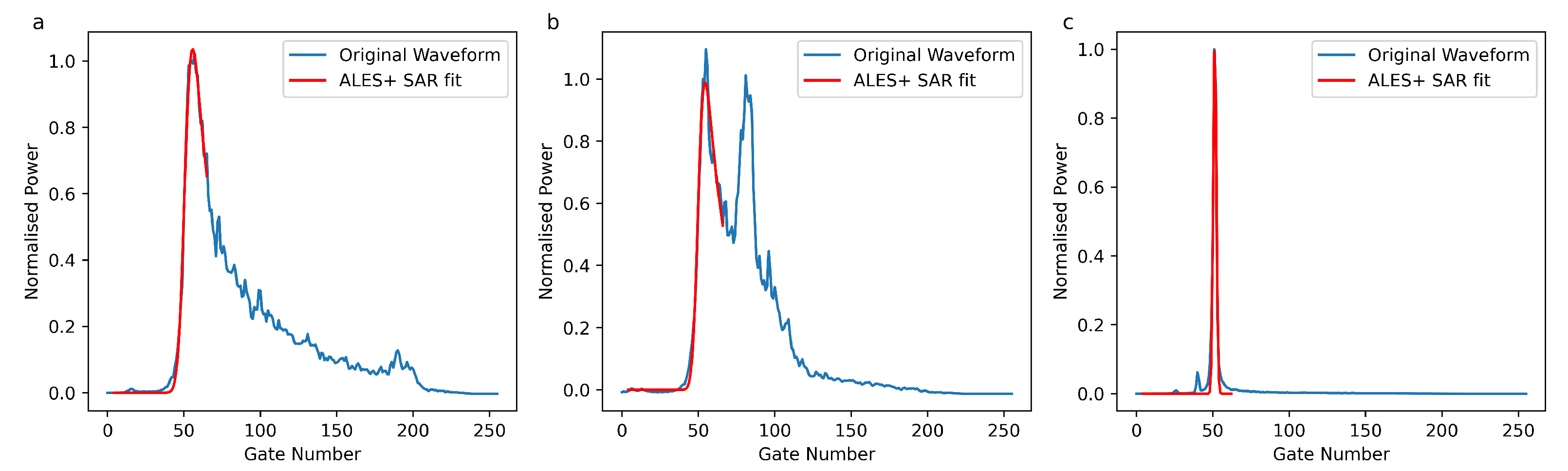
2.2.4. Subwaveform Retracking
2.3. Methods: Sea State Bias
2.4. Methods: Comparison with Tide Gauges
2.5. Methods: Crossover Analysis
2.6. Methods: Gridded Sea-Level Variance Analysis
2.7. Methods: Spectral Analysis
3. Results
3.1. Sea State Bias
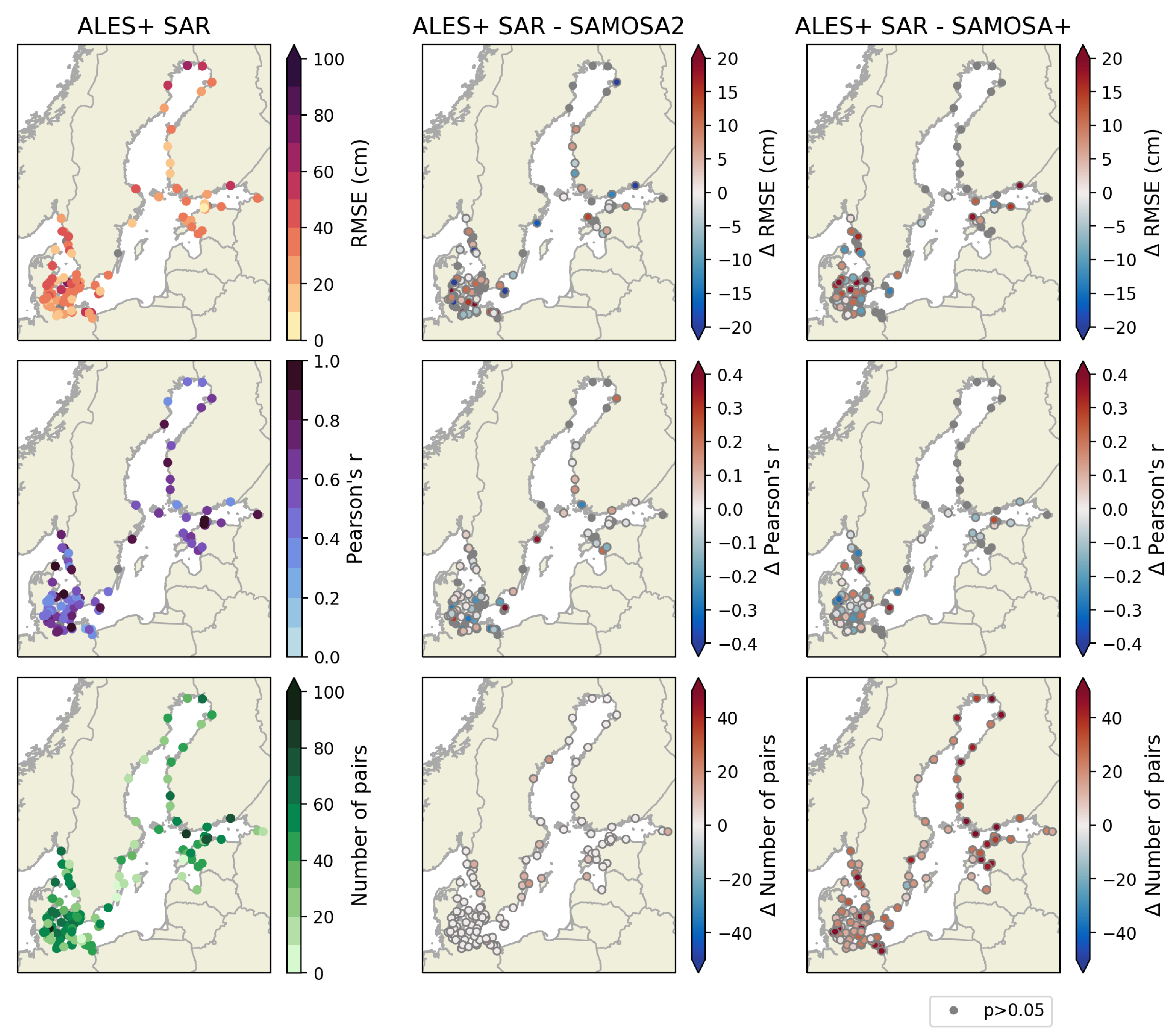
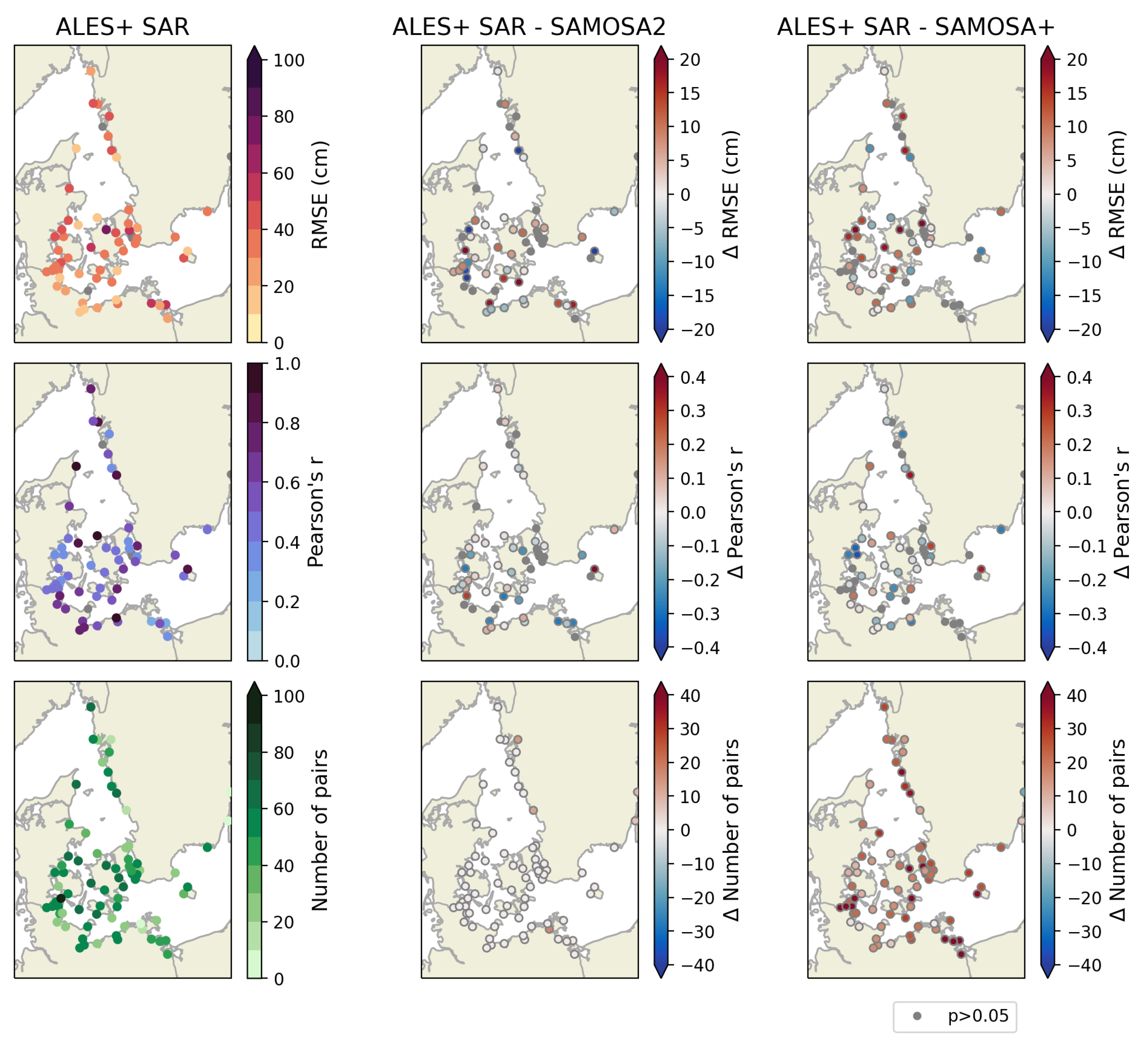
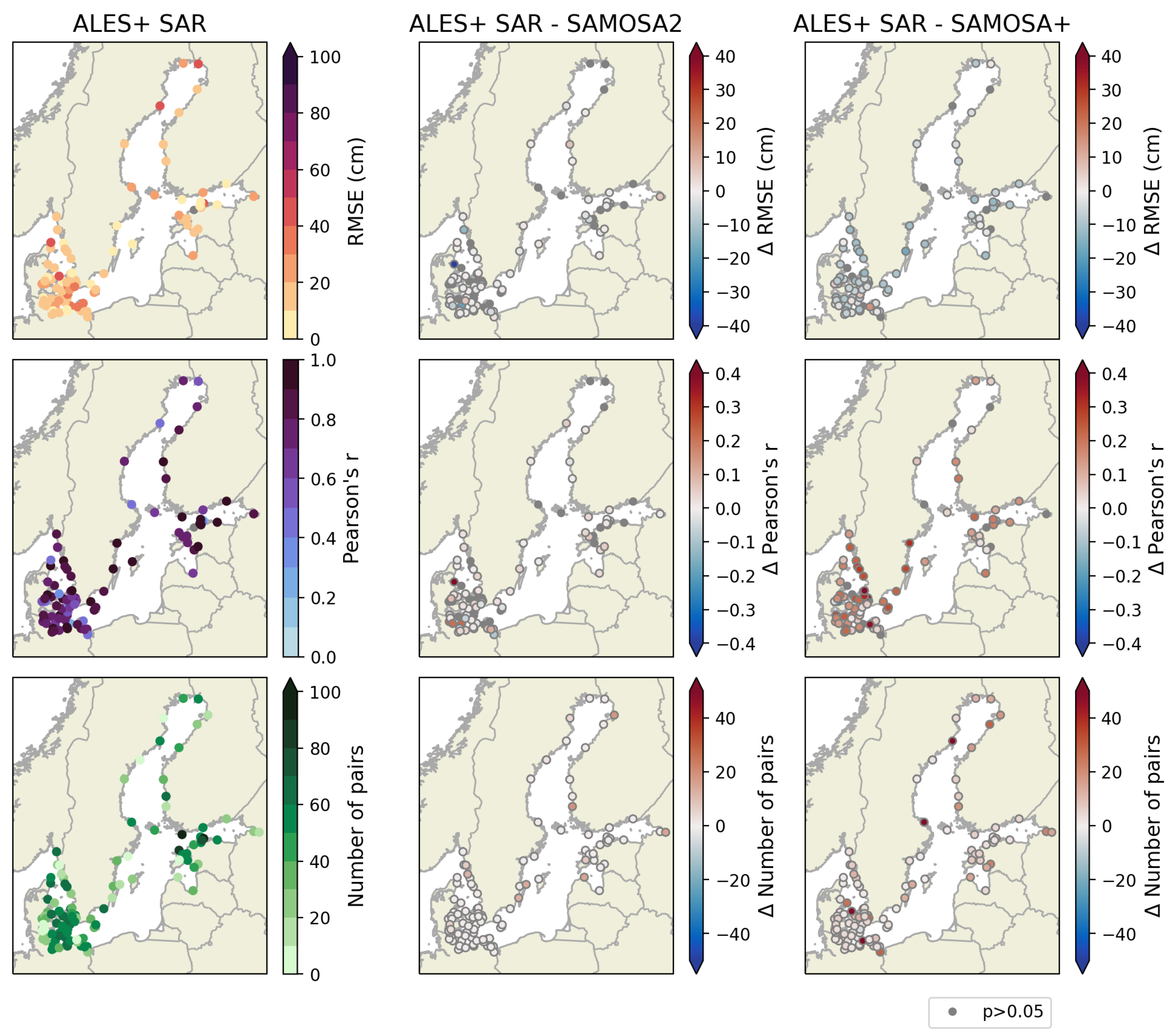
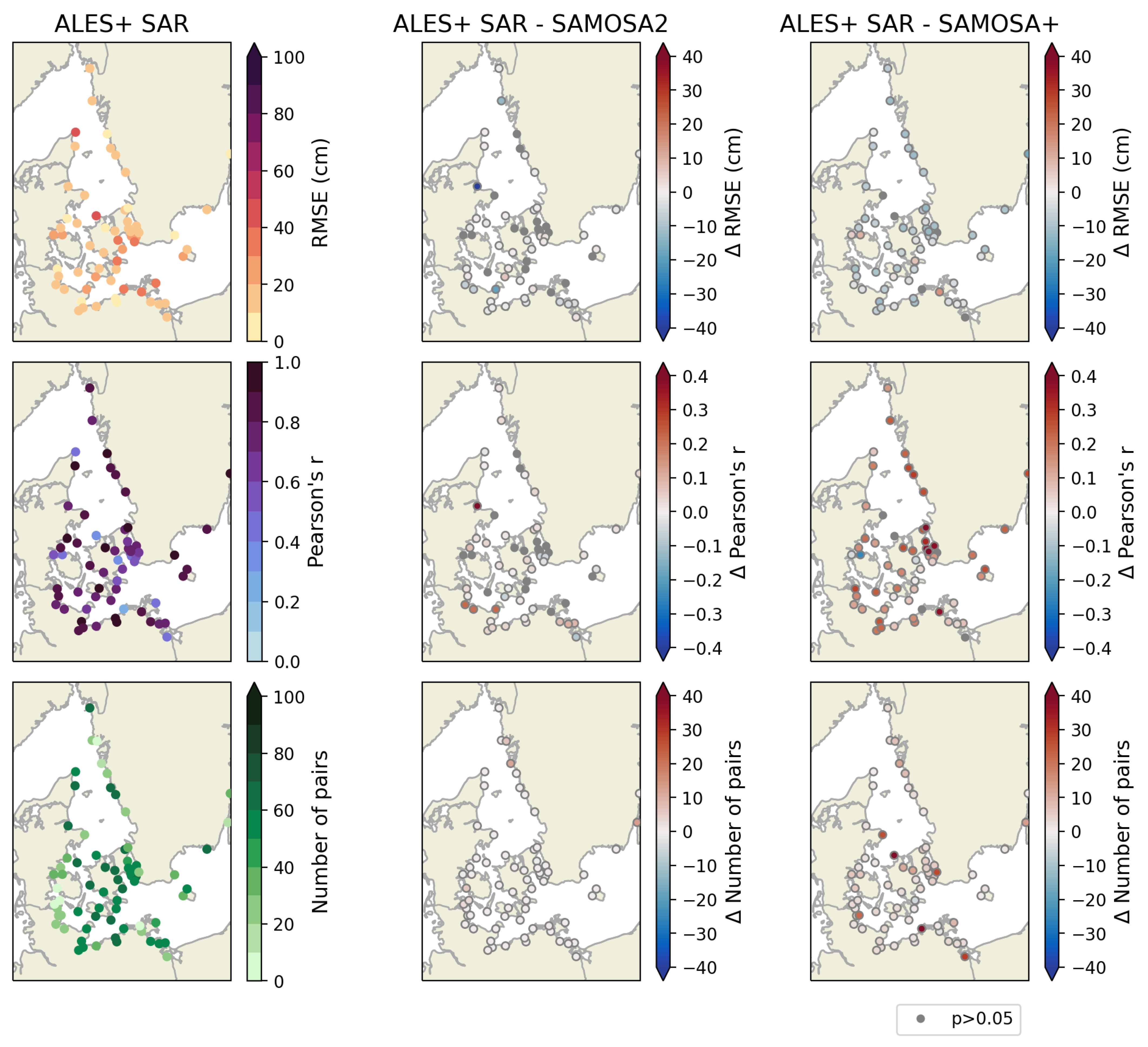
3.2. Comparison with Tide Gauges
3.3. Crossover Analysis
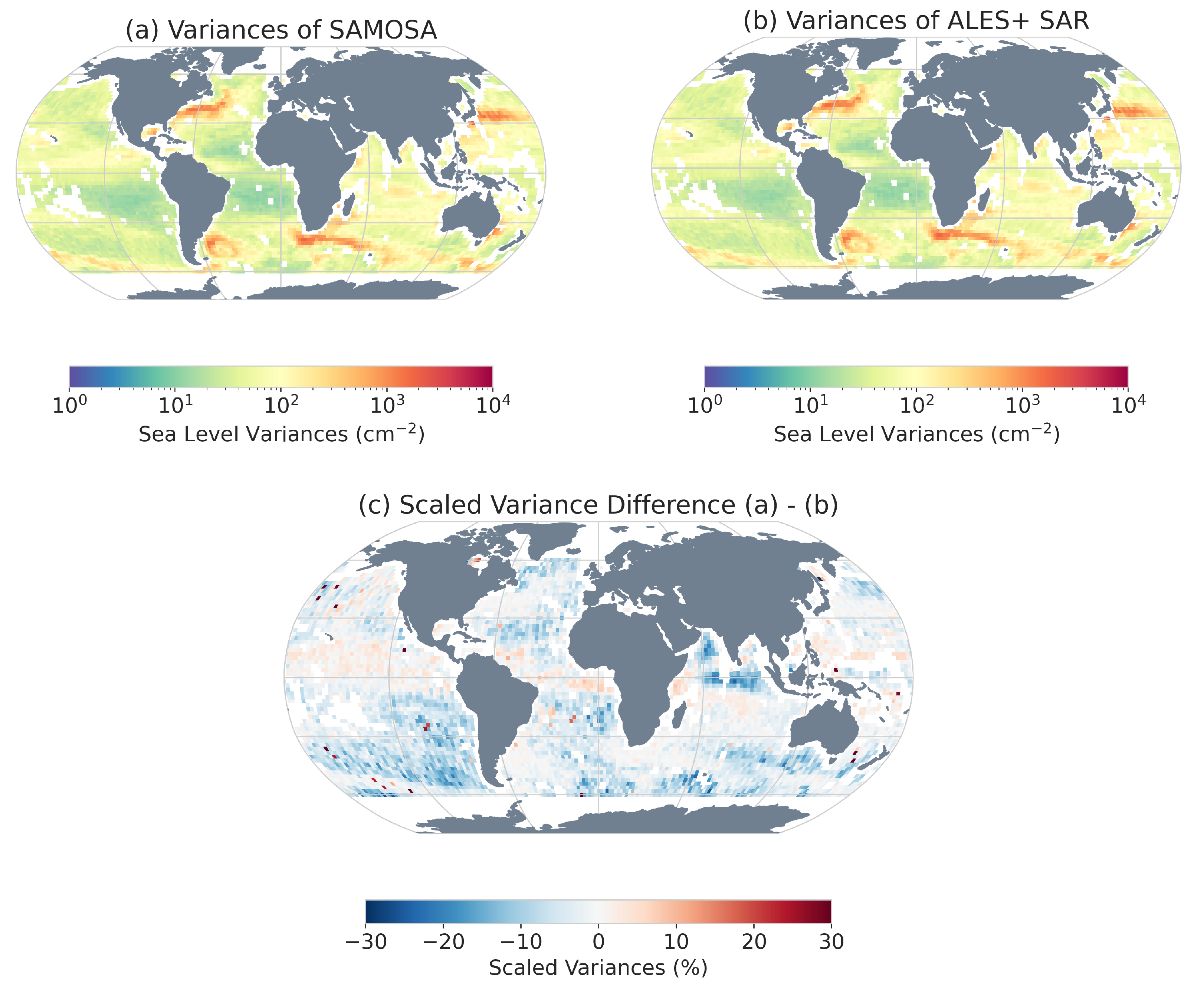
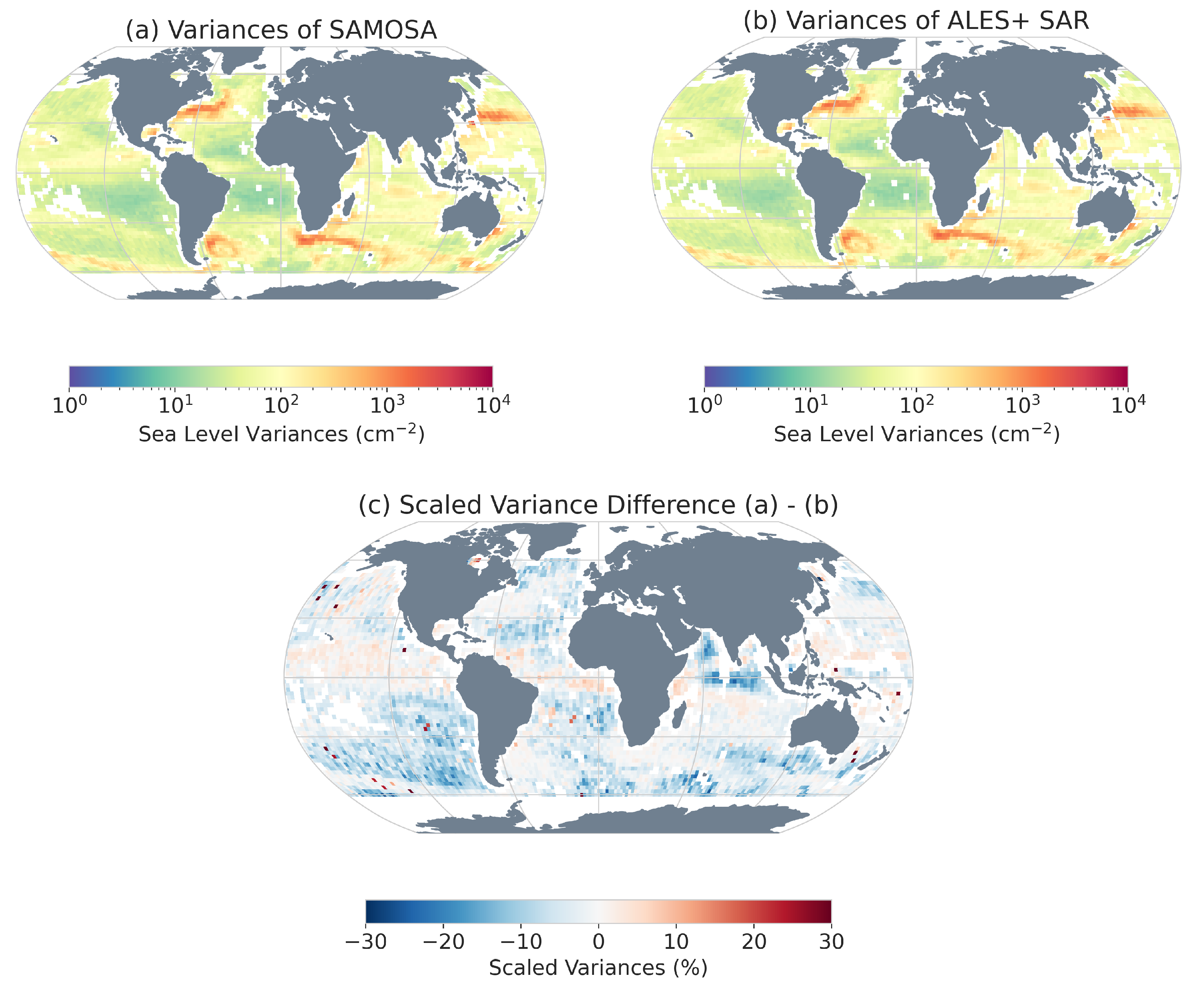
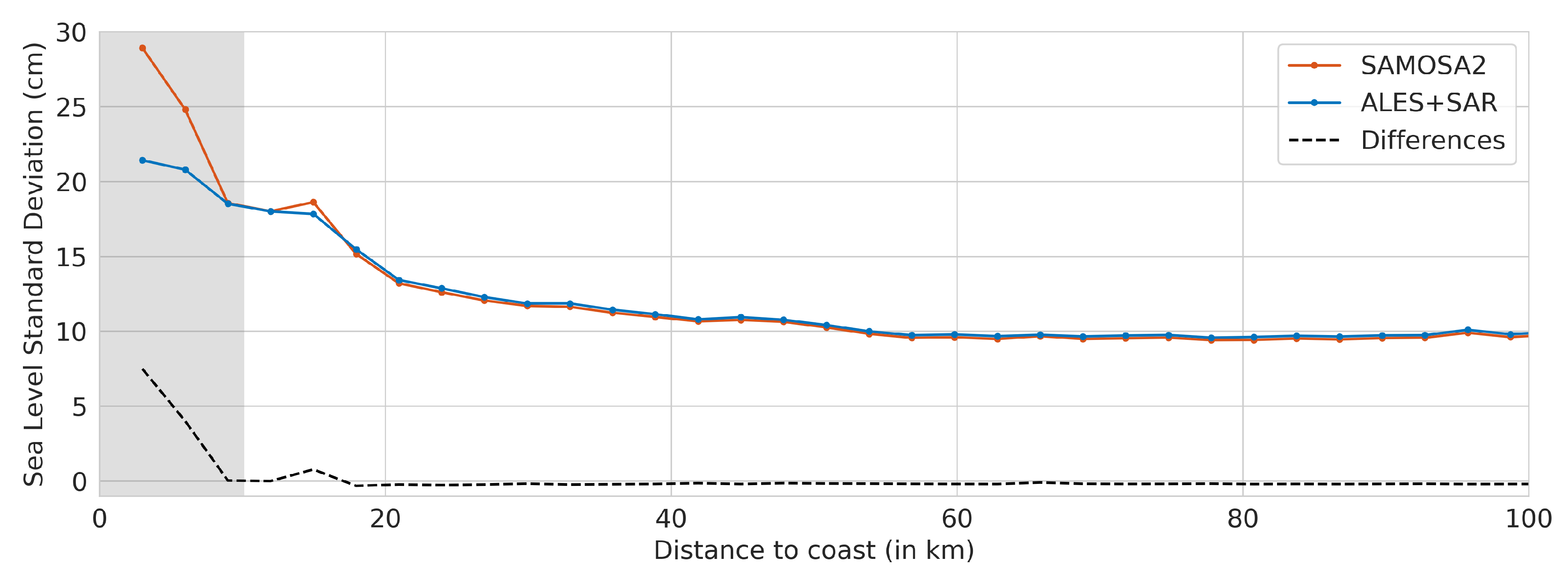
3.4. Gridded Sea Level Variance
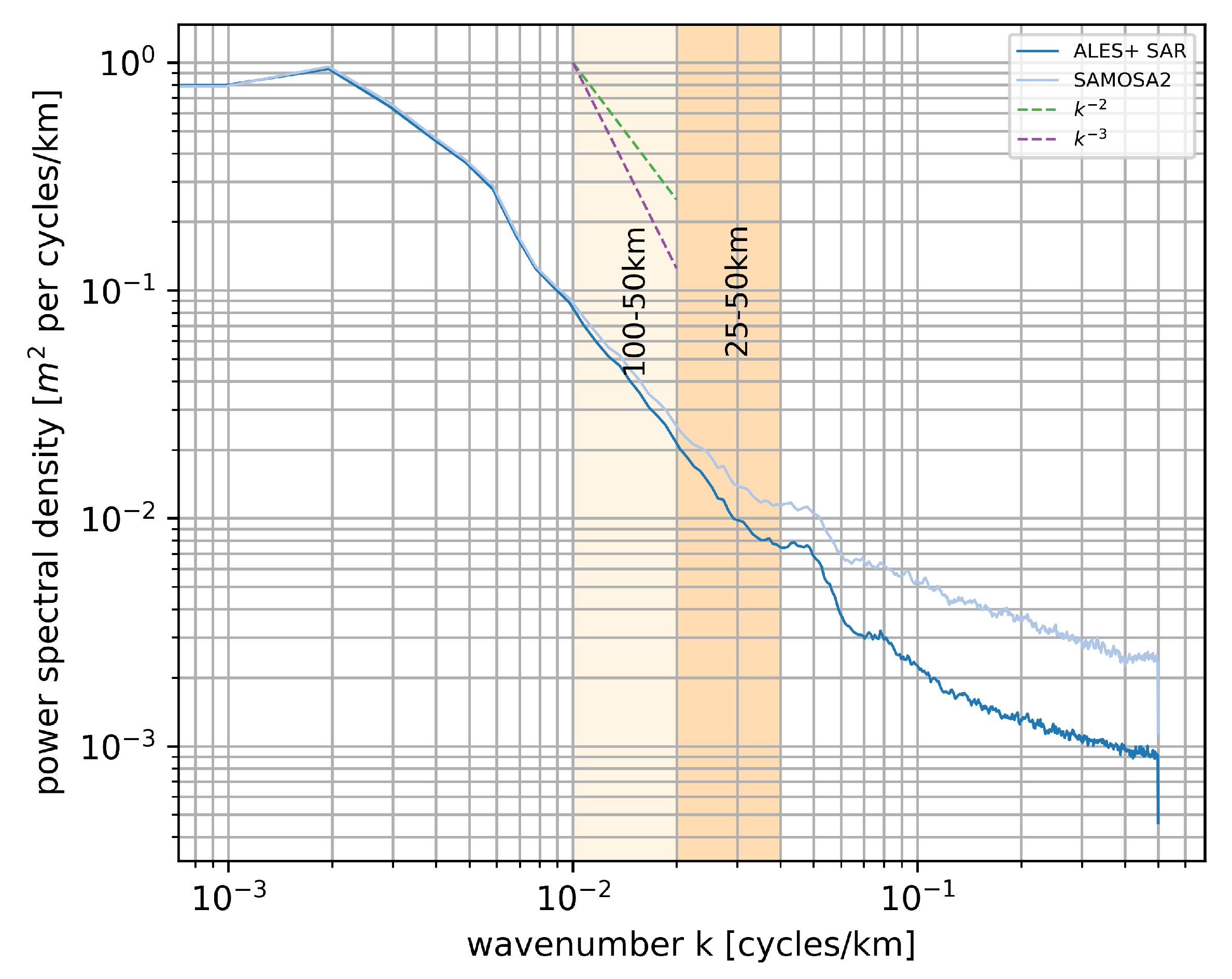
3.5. Spectral Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chelton, D.B.; Ries, J.C.; Haines, B.J.; Fu, L.L.; Callahan, P.S. Satellite Altimetry. In Satellite Altimetry and Earth Sciences: A Handbook of Techniques and Applications; Fu, L.L., Cazenave, A., Eds.; Academic Press: Cambridge, MA, USA, 2001; Volume 69, pp. 1–131. [Google Scholar]
- Cipollini, P.; Benveniste, J.; Birol, F.; Fernandes, M.; Obligis, E.; Passaro, M.; Strub, P.; Valladeau, G.; Vignudelli, S.; Wlikin, J. Satellite altimetry in coastal regions. In Satellite Altimetry over Oceans and Land Surfaces; Stammer, D., Cazenave, A., Eds.; CRC Press: New York, NY, USA, 2017; pp. 343–380. [Google Scholar]
- Raney, R.; Phalippou, L. The future of coastal altimetry. In Coastal Altimetry; Vignudelli, S., Kostianoy, A., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin/Heidelberg, Germny, 2011; pp. 535–560. [Google Scholar]
- Schlembach, F.; Passaro, M.; Quartly, G.D.; Kurekin, A.; Nencioli, F.; Dodet, G.; Piollé, J.F.; Ardhuin, F.; Bidlot, J.; Schwatke, C.; et al. Round Robin Assessment of Radar Altimeter Low Resolution Mode and Delay-Doppler Retracking Algorithms for Significant Wave Height. Remote Sens. 2020, 12, 1254. [Google Scholar] [CrossRef] [Green Version]
- Dinardo, S.; Fenoglio-Marc, L.; Buchhaupt, C.; Becker, M.; Scharroo, R.; Fernandes, M.J.; Benveniste, J. Coastal SAR and PLRM altimetry in german bight and west baltic sea. Adv. Space Res. 2018, 62, 1371–1404. [Google Scholar] [CrossRef]
- Roohi, S.; Sneeuw, N.; Benveniste, J.; Dinardo, S.; Issawy, E.; Zhang, G. Evaluation of CryoSat-2 water level derived from different retracking scenarios over selected inland water bodies. Adv. Space Res. 2021, 68, 947–962. [Google Scholar] [CrossRef]
- Shen, X.; Similä, M.; Dierking, W.; Zhang, X.; Ke, C.; Liu, M.; Wang, M. A new retracking algorithm for retrieving sea ice freeboard from CryoSat-2 radar altimeter data during winter–spring transition. Remote Sens. 2019, 11, 1194. [Google Scholar] [CrossRef] [Green Version]
- Passaro, M.; Müller, F.; Oelsmann, J.; Rautiainen, L.; Dettmering, D.; Hart-Davis, M.; Abulaitijiang, A.; Andersen, O.; Hoyer, J.; Madsen, K.; et al. Absolute Baltic Sea Level Trends in the Satellite Altimetry Era: A Revisit. Front. Mar. Sci. 2021, 8, 647607. [Google Scholar] [CrossRef]
- Ray, C.; Martin-Puig, C.; Clarizia, M.P.; Ruffini, G.; Dinardo, S.; Gommenginger, C.; Benveniste, J. SAR Altimeter Backscattered Waveform Model. IEEE Trans. Geosci. Remote Sens. 2015, 53, 911–919. [Google Scholar] [CrossRef]
- Ringgaard, I.; Madsen, K.; Müller, F.; Tuomi, L.; Rautiainen, L.; Passaro, M. Dataset Description, Version 1.1; Technical report delivered under the Baltic+ SEAL project, ESA Contract 4000126590/19/I/BG - BALTIC+ SEAL (Sea Level). 2020. Available online: http://balticseal.eu/wp-content/uploads/2020/04/Baltic_SEAL_D2.1_DatasetDescription_v1.1-signed.pdf (accessed on 6 July 2022). [CrossRef]
- Merrifield, M.; Holgate, S.; Mitchum, G.; Pérez, B.; Rickards, L.; Schöne, T.; Woodworth, P.; Wöppelmann, G. Global Sea-Level Observing System (GLOSS) Implementation Plan–2012. IOC Technical Series No.100. GOOS Report No.194, JCOMM Technical Report No.66. 2012. Available online: https://unesdoc.unesco.org/ark:/48223/pf0000217832 (accessed on 6 July 2022).
- Passaro, M.; Cipollini, P.; Vignudelli, S.; Quartly, G.; Snaith, H. ALES: A multi-mission subwaveform retracker for coastal and open ocean altimetry. Remote Sens. Environ. 2014, 145, 173–189. [Google Scholar] [CrossRef] [Green Version]
- Passaro, M.; Rose, S.; Andersen, O.; Boergens, E.; Calafat, F.; Dettmering, D.; Benveniste, J. ALES+: Adapting a homogenous ocean retracker for satellite altimetry to sea ice leads, coastal and inland waters. Remote Sens. Environ. 2018, 211, 456–471. [Google Scholar] [CrossRef] [Green Version]
- Brown, G.S. The average impulse response of a rough surface and its applications. IEEE Trans. Antennas Propag. 1977, 25, 67–74. [Google Scholar] [CrossRef]
- Hayne, G.S. Radar altimeter mean return waveforms from near-normal-incidence ocean surface scattering. IEEE Trans. Antennas Propag. 1980, 28, 687–692. [Google Scholar] [CrossRef] [Green Version]
- Dinardo, S. Techniques and Applications for Satellite SAR Altimetry over Water, Land and Ice; Technische Universität Darmstadt: Darmstadt, Germany, 2020; Volume 56. [Google Scholar] [CrossRef]
- Passaro, M.; Mueller, F.; Dettmering, D. Baltic+ SEAL: Algorithm Theoretical Baseline Document (ATBD). In Technical Report Delivered under the Baltic+ SEAL Project; 2020; Available online: http://balticseal.eu/wp-content/uploads/2021/01/Baltic_SEAL_D3.2_ATBD_v2.1-signedCompressed.pdf (accessed on 6 July 2022). [CrossRef]
- Ardhuin, F.; Stopa, J.E.; Chapron, B.; Collard, F.; Husson, R.; Jensen, R.E.; Johannessen, J.; Mouche, A.; Passaro, M.; Quartly, G.D.; et al. Observing Sea States. Front. Mar. Sci. 2019, 6, 124. [Google Scholar] [CrossRef] [Green Version]
- Medvedev, I.P.; Rabinovich, A.B.; Kulikov, E.A. Tides in three enclosed basins: The Baltic, Black, and Caspian seas. Front. Mar. Sci. 2016, 3, 46. [Google Scholar] [CrossRef] [Green Version]
- Bosch, W.; Dettmering, D.; Schwatke, C. Multi-mission cross-calibration of satellite altimeters: Constructing a long-term data record for global and regional sea level change studies. Remote Sens. 2014, 6, 2255–2281. [Google Scholar] [CrossRef] [Green Version]
- Dettmering, D.; Schwatke, C. Multi-Mission Cross-Calibration of Satellite Altimeters. In Fiducial Reference Measurements for Altimetry; Mertikas, S.P., Pail, R., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 49–54. [Google Scholar]
- Hart-Davis, M.G.; Piccioni, G.; Dettmering, D.; Schwatke, C.; Passaro, M.; Seitz, F. EOT20: A global ocean tide model from multi-mission satellite altimetry. Earth Syst. Sci. Data 2021, 13, 3869–3884. [Google Scholar] [CrossRef]
- Lyard, F.H.; Allain, D.J.; Cancet, M.; Carrère, L.; Picot, N. FES2014 global ocean tide atlas: Design and performance. Ocean Sci. 2021, 17, 615–649. [Google Scholar] [CrossRef]
- Morrow, R.; Carret, A.; Birol, F.; Nino, F.; Valladeau, G.; Boy, F.; Bachelier, C.; Zakardjian, B. Observability of fine-scale ocean dynamics in the northwestern Mediterranean Sea. Ocean Sci. 2017, 13, 13–29. [Google Scholar] [CrossRef] [Green Version]
- Gómez-Enri, J.; Cipollini, P.; Passaro, M.; Vignudelli, S.; Tejedor, B.; Coca, J. Coastal Altimetry Products in the Strait of Gibraltar. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5455–5466. [Google Scholar] [CrossRef]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Gaspar, P.; Ogor, F.; Le Traon, P.Y.; Zanife, O.Z. Estimating the sea state bias of the TOPEX and POSEIDON altimeters from crossover differences. J. Geophys. Res. Ocean. 1994, 99, 24981–24994. [Google Scholar] [CrossRef]
- Passaro, M.; Nadzir, Z.; Quartly, G.D. Improving the precision of sea level data from satellite altimetry with high-frequency and regional sea state bias corrections. Remote Sens. Environ. 2018, 218, 245–254. [Google Scholar] [CrossRef] [Green Version]
- Sandwell, D.T.; Smith, W.H. Retracking ERS-1 altimeter waveforms for optimal gravity field recovery. Geophys. J. Int. 2005, 163, 79–89. [Google Scholar] [CrossRef] [Green Version]
- Quartly, G.D.; Smith, W.H.; Passaro, M. Removing Intra-1-Hz Covariant Error to Improve Altimetric Profiles of σ0 and Sea Surface Height. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3741–3752. [Google Scholar] [CrossRef]
- Leppäranta, M.; Myrberg, K. Physical Oceanography of the Baltic Sea; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Taburet, G.; Sanchez-Roman, A.; Ballarotta, M.; Pujol, M.I.; Legeais, J.F.; Fournier, F.; Faugere, Y.; Dibarboure, G. DUACS DT2018: 25 years of reprocessed sea level altimetry products. Ocean Sci. 2019, 15, 1207–1224. [Google Scholar] [CrossRef] [Green Version]
- Hart-Davis, M.G.; Backeberg, B.C.; Halo, I.; van Sebille, E.; Johannessen, J.A. Assessing the accuracy of satellite derived ocean currents by comparing observed and virtual buoys in the Greater Agulhas Region. Remote Sens. Environ. 2018, 216, 735–746. [Google Scholar] [CrossRef]
- Cancet, M.; Griffin, D.; Cahill, M.; Chapron, B.; Johannessen, J.; Donlon, C. Evaluation of GlobCurrent surface ocean current products: A case study in Australia. Remote Sens. Environ. 2019, 220, 71–93. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Fu, L.L. The effects of altimeter instrument noise on the estimation of the wavenumber spectrum of sea surface height. J. Phys. Oceanogr. 2012, 42, 2229–2233. [Google Scholar] [CrossRef] [Green Version]
- Dibarboure, G.; Boy, F.; Desjonqueres, J.; Labroue, S.; Lasne, Y.; Picot, N.; Poisson, J.; Thibaut, P. Investigating short wavelength correlated errors on low-resolution mode altimetry. J. Atmos. Ocean. Technol. 2014, 31, 1337–1362. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | XO var before SSB [cm2] | XO var after SSB [cm2] | Variance Explained |
|---|---|---|---|
| Gaspar et al. (1994) [27] | 127.7 | 120.4 | 6% |
| SGDR Jason-1 Mediterranean Sea | 135.6 | 108.4 | 20% |
| ALES + SAR Sentinel-3A | 106.0 | 84.9 | 20% |
| Dataset | Correlation [r] | RMSE [m] | Number of Points |
|---|---|---|---|
| ALES + SAR (0–3 km) | 0.50 | 0.35 | 4826 |
| SAMOSA+ (0–3 km) | 0.59 | 0.27 | 2177 |
| SAMOSA2 (0–3 km) | 0.44 | 0.43 | 4735 |
| ALES + SAR (3–10 km) | 0.70 | 0.22 | 4502 |
| SAMOSA+ (3–10 km) | 0.58 | 0.26 | 3978 |
| SAMOSA2 (3–10 km) | 0.38 | 0.49 | 4415 |
| Dataset | mxo | maxo | stdxo | msxo | Number of SXO |
|---|---|---|---|---|---|
| ALES + SAR (all) | −0.18 | 5.27 | 7.77 | 1.55 | 657,731 |
| SAMOSA2 (all) | −0.08 | 5.07 | 7.58 | 1.66 | 663,743 |
| ALES + SAR (<10 km) | −1.62 | 9.60 | 16.79 | 1.30 | 432 |
| SAMOSA2 (<10 km) | −1.51 | 9.65 | 16.87 | 1.47 | 429 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Passaro, M.; Rautiainen, L.; Dettmering, D.; Restano, M.; Hart-Davis, M.G.; Schlembach, F.; Särkkä, J.; Müller, F.L.; Schwatke, C.; Benveniste, J. Validation of an Empirical Subwaveform Retracking Strategy for SAR Altimetry. Remote Sens. 2022, 14, 4122. https://doi.org/10.3390/rs14164122
Passaro M, Rautiainen L, Dettmering D, Restano M, Hart-Davis MG, Schlembach F, Särkkä J, Müller FL, Schwatke C, Benveniste J. Validation of an Empirical Subwaveform Retracking Strategy for SAR Altimetry. Remote Sensing. 2022; 14(16):4122. https://doi.org/10.3390/rs14164122
Chicago/Turabian StylePassaro, Marcello, Laura Rautiainen, Denise Dettmering, Marco Restano, Michael G. Hart-Davis, Florian Schlembach, Jani Särkkä, Felix L. Müller, Christian Schwatke, and Jérôme Benveniste. 2022. "Validation of an Empirical Subwaveform Retracking Strategy for SAR Altimetry" Remote Sensing 14, no. 16: 4122. https://doi.org/10.3390/rs14164122
APA StylePassaro, M., Rautiainen, L., Dettmering, D., Restano, M., Hart-Davis, M. G., Schlembach, F., Särkkä, J., Müller, F. L., Schwatke, C., & Benveniste, J. (2022). Validation of an Empirical Subwaveform Retracking Strategy for SAR Altimetry. Remote Sensing, 14(16), 4122. https://doi.org/10.3390/rs14164122