
BDS-3/GPS/Galileo OSB Estimation and PPP-AR Positioning Analysis of Different Positioning Models
 ,
,
Abstract
:1. Introduction
2. Methods
2.1. Undifferenced and Uncombined Observation Equations
2.2. Combined IF Observation Equations
2.3. FCB Estimation and FCB-OSB Conversion
3. Results
3.1. Station Distribution and Processing Strategy
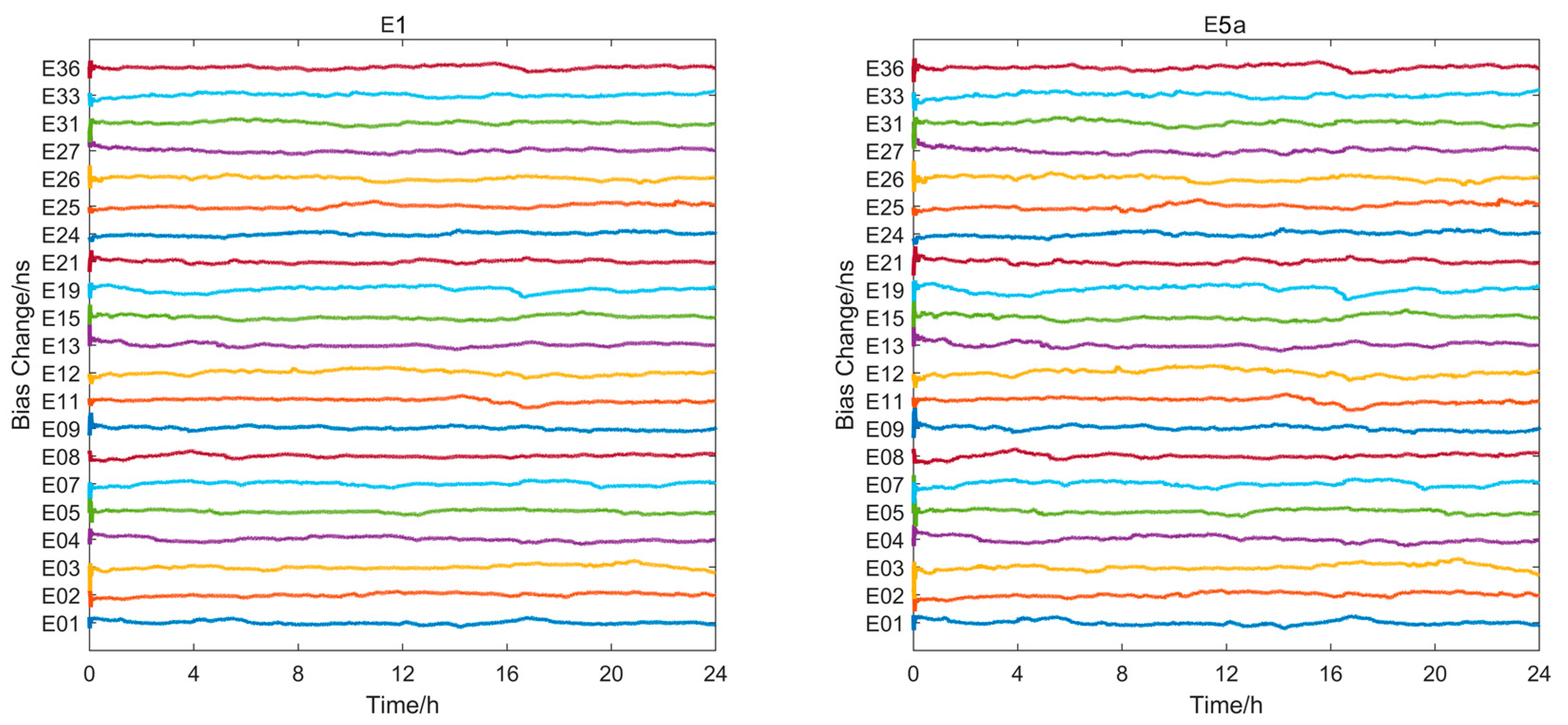
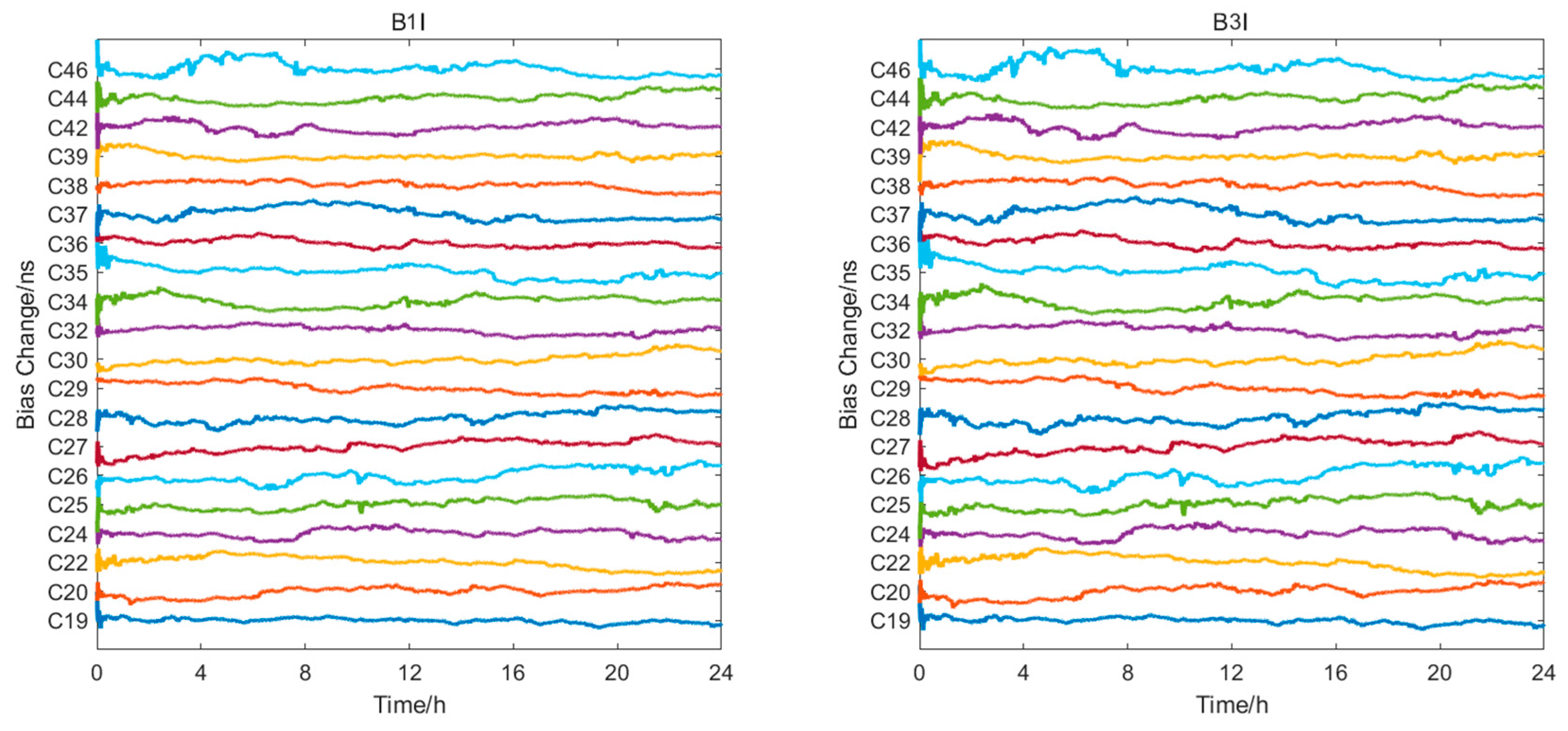
3.2. Analysis of Experimental Results for OSB Products
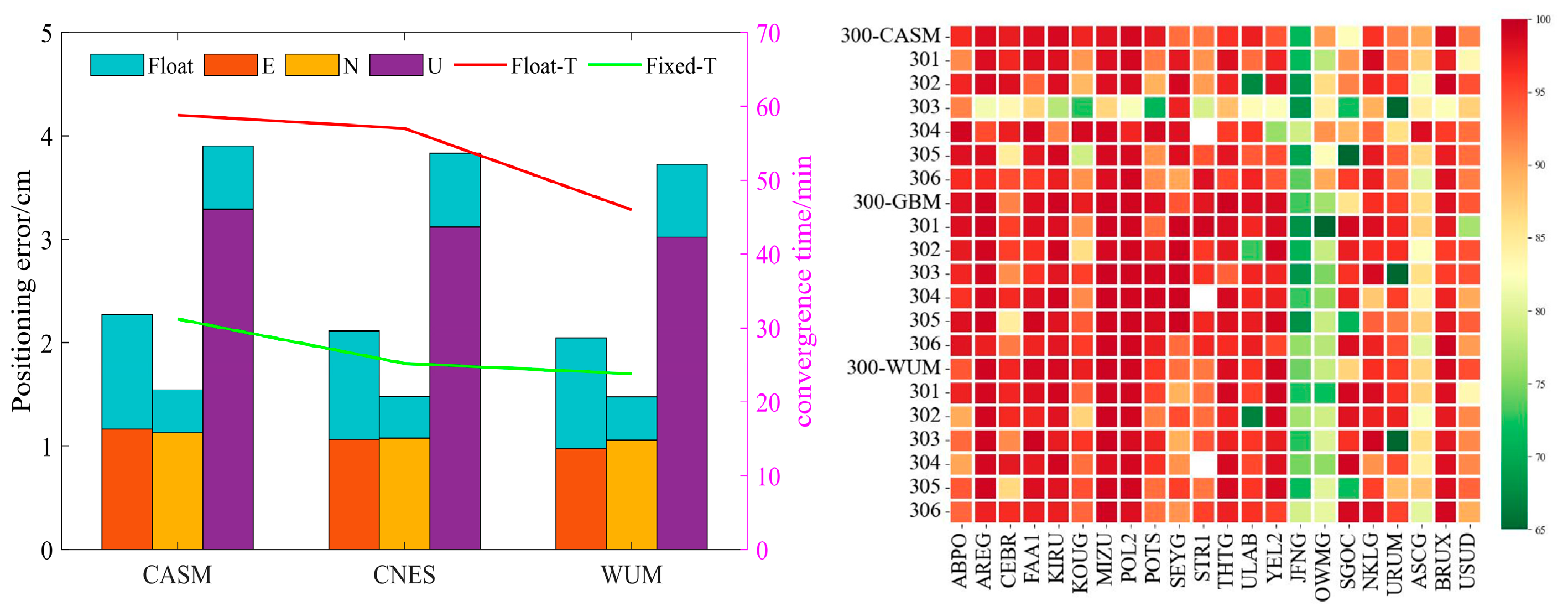
3.3. Analysis of Positioning Accuracy and Convergence Performance of Different Institutional Products
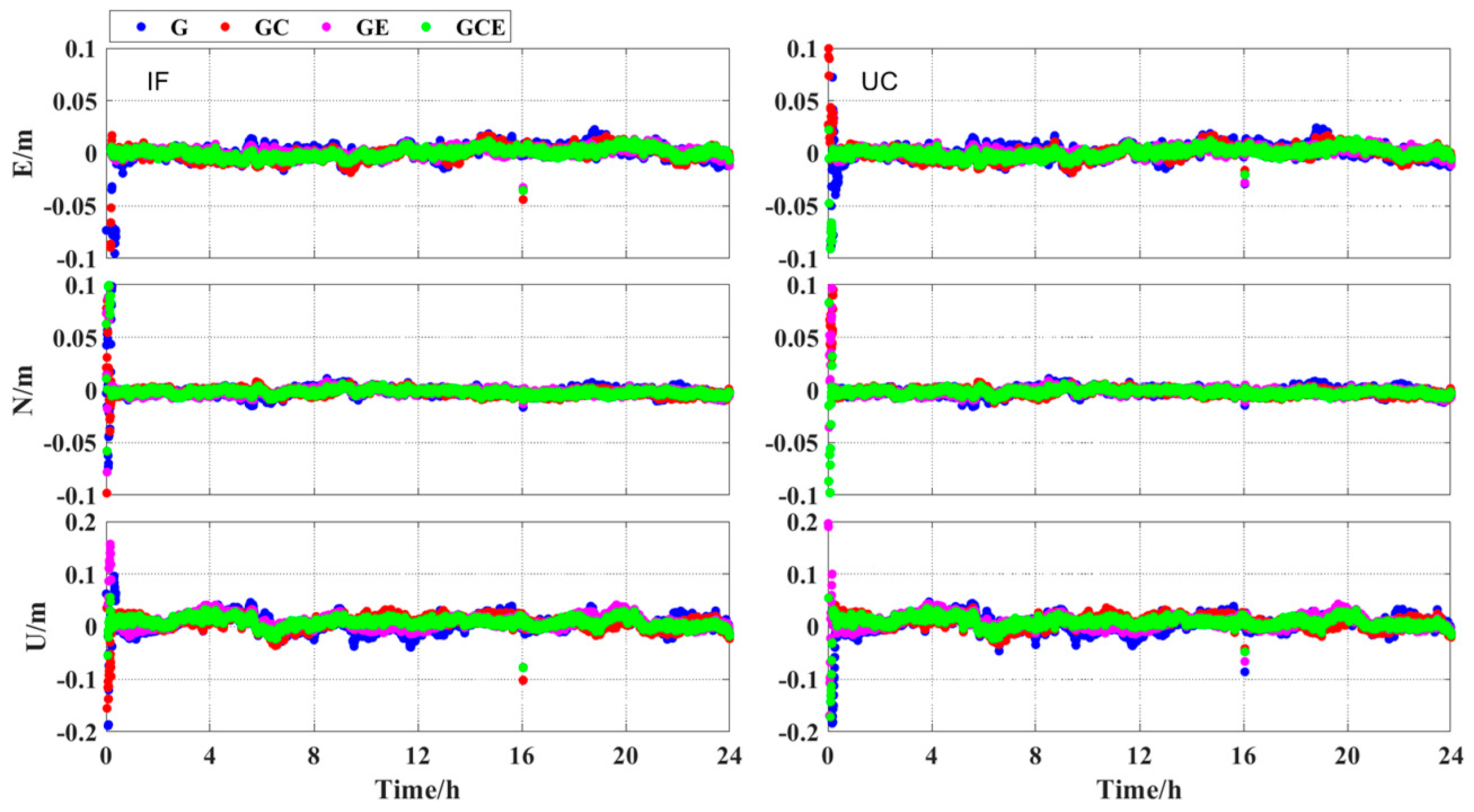
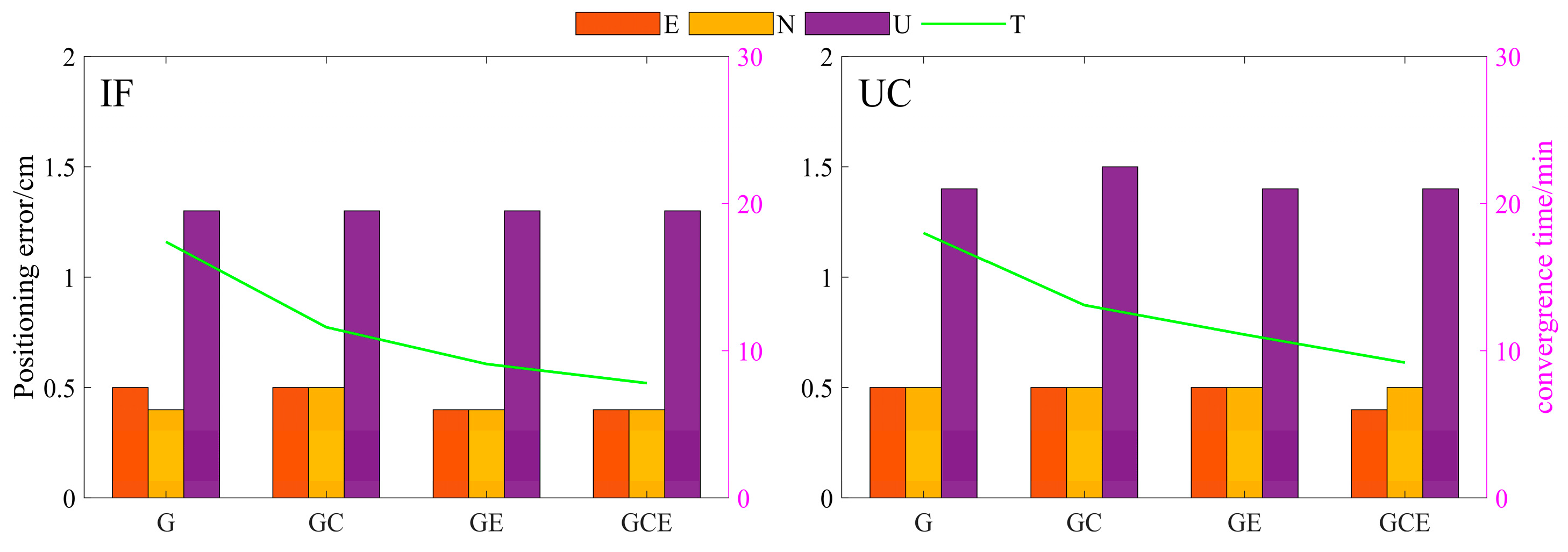
3.4. Comparative Analysis of Positioning Accuracy and Convergence Time Based on CASM’s Product under IF and UDUC Models
- (1)
- For the PPP solution, the IF model provided slightly better positioning accuracy and convergence time than the UDUC model. This could be because the UDUC model needed to estimate ionospheric delay and had more parameters to be estimated than the IF model;
- (2)
- For the PPP fixed solution, the CASM OSB products could effectively improve the positioning accuracy and convergence time of the PPP when used in the PPP-AR. The most significant improvement in the positioning accuracy was observed in the E direction, with an average improvement of 46% for the IF model and 50% for the UDUC model in the static mode. The improvements under both models were above 45%. Further, for the IF model, the convergence time improved by an average of 48%, and for the UDUC model, an average improvement was 60%. In the kinematic mode, the localization accuracy under the IF model in the E direction improved by 43% on average, and that of the UDUC model improved by 44% on average; thus, they were both above 40%. The average improvements in the convergence time under the IF and UDUC models were 40% and 55%, respectively. Furthermore, an interesting conclusion was drawn: the IF model and the UDUC model PPP-AR had comparable positioning accuracy and convergence time.
- (3)
- The single-system fixed-ambiguity PPP solution showed more significant improvement compared to the PPP float solution. In the static mode, the average positioning accuracy improvements of the GPS system in the E, N, and U directions were 56%, 15%, and 8%, respectively. In the kinematic mode, the average positioning accuracy improvements of the GPS system in the E, N, and U directions were 52%, 28%, and 19%, respectively. Comparing the positioning accuracy and convergence time results of different system combinations showed that the GCE multi-system combination outperformed the other system combinations. Specifically, the average positioning accuracy in the E, N, and U directions for the static PPP fixed solution was 0.4 cm, 0.4 cm, and 1.4 cm, respectively, with an average convergence time of 8.5 min. The average positioning accuracy in the E, N, and U directions for the kinematic PPP fixed solution was 0.9 cm, 0.9 cm, and 2.8 cm, respectively, with an average convergence time of 16.4 min.
4. Discussion
5. Conclusions
- (1)
- The stability of the CASM-generated OSB products is better than 0.05 ns and can be used for the PPP ambiguity resolution. For both static and kinematic modes, the GPS PPP-AR has comparable positioning accuracy and convergence time with the WUM and CNES, and the average fixed-ambiguity success rate is above 90% for all three institutions.
- (2)
- The IF model of the PPP solution has slightly better positioning accuracy and convergence time than the UDUC model. This could be because the UDUC model needs to estimate the ionospheric delay and has more parameters to estimate. However, the IF and UDUC models’ PPP-AR values have comparable positioning accuracy and convergence time. The CASM OSB products for the PPP-AR can effectively improve the positioning accuracy and convergence time of the PPP. The most significant improvement in positioning accuracy is achieved in the E direction, with an average improvement of more than 45% and 40% for both models in the static and kinematic modes, respectively. The convergence times of the IF and UDUC models are improved by an average of 48% and 60% in the static mode and by 40% and 55% in the kinematic mode, respectively.
- (3)
- The single system fixed-ambiguity PPP solution shows more significant improvement compared to the PPP float solution. The possible reason for this could be that the single system PPP float solution is less accurate than the dual- and multi-systems, resulting in a more significant fixed-ambiguity PPP solution. In the static mode, the average improvement in the GPS positioning accuracy in the E, N, and U directions is 56%, 15%, and 8%, respectively. Similarly, in the kinematic mode, the average improvement in the GPS positioning accuracy in the E, N, and U directions is 52%, 28%, and 19%, respectively.
- (4)
- Comparing the positioning accuracy and convergence time of different system combinations for PPP-AR shows that the GCE multi-system combination is superior to the other system combinations. Specifically, the average positioning accuracy in the E, N, and U directions for the static PPP fixed solution is 0.4 cm, 0.4 cm, and 1.4 cm, respectively, with an average convergence time of 8.5 min. The average positioning accuracy in the E, N, and U directions for the kinematic PPP fixed solution is 0.9 cm, 0.9 cm, and 2.8 cm, respectively, with an average convergence time of 16.4 min.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Geng, J.; Pan, Y.; Li, X.; Guo, J.; Liu, J.; Chen, X.; Zhang, Y. Noise Characteristics of High-Rate Multi-GNSS for Subdaily Crustal Deformation Monitoring. J. Geophys. Res. Solid Earth 2018, 123, 1987–2002. [Google Scholar] [CrossRef]
- Su, K.; Jin, S.; Ge, Y. Rapid displacement determination with a stand-alone multi-GNSS receiver: GPS, Beidou, GLONASS, and Galileo. GPS Solut. 2019, 23, 54. [Google Scholar] [CrossRef]
- Gao, Y.; Shen, X. A New Method for Carrier-Phase-Based Precise Point Positioning. Navigation 2002, 49, 109–116. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, H.; Ge, M.; Niu, X.; Shen, W.; Wickert, J.; Schuh, H. Tightly coupled integration of multi-GNSS PPP and MEMS inertial measurement unit data. GPS Solut. 2017, 21, 377–391. [Google Scholar]
- Chen, W.; Hu, C.; Li, Z.; Chen, Y.; Ding, X.; Gao, S.; Ji, S. Kinematic GPS precise point positioning for sea level monitoring with GPS. J. Glob. Position. Syst. 2004, 3, 302–307. [Google Scholar] [CrossRef]
- Colombo, O.L.; Sutter, A.W.; Evans, A.G. Evaluation of precise, kinematic GPS point positioning. In Proceedings of the 17th International Technical Meeting of the Satellite Division (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004; pp. 1423–1430. [Google Scholar]
- Bisnath, S.; Gao, Y. Current state of precise point positioning and future prospects and limitations. In Proceedings of the IUGG 24th General Assembly, Perugia, Italy, 2–13 July 2007. [Google Scholar]
- Rocken, C.; Johnson, J.; Hove, T.V.; Iwabuchi, T. Atmospheric water vapor and geoid measurements in the open ocean with GPS. Geophys. Res. Lett. 2005, 32, L12813. [Google Scholar] [CrossRef]
- Satirapod, C. Stochastic Models used in Static GPS Relative Positioning. Surv. Rev. 2006, 38, 379–386. [Google Scholar] [CrossRef]
- Teferle, F.N.; Orliac, E.J.; Bingley, R.M. An assessment of Bernese GPS software precise point positioning using IGS final products for global site velocities. GPS Solut. 2007, 11, 205–213. [Google Scholar] [CrossRef]
- Zhang, X.; Andersen, O.B. Surface ice flow velocity and tide retrieval of the Amery ice shelf using precise point positioning. J. Geod. 2007, 80, 171–176. [Google Scholar]
- Geng, T.; Su, X.; Fang, R.; Xie, X.; Zhao, Q.; Liu, J. BDS Precise Point Positioning for Seismic Displacements Monitoring: Benefit from the High-Rate Satellite Clock Corrections. Sensors 2016, 16, 2192. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Teferle, F.N.; Dodson, A.H. Performance of precise point positioning with ambiguity resolution for 1-to 4-hour observation periods. Surv. Rev. 2010, 42, 155–165. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Zhang, X.; Li, P. Assessment of correct fixing rate for precise point positioning ambiguity resolution on a global scale. J. Geod. 2013, 87, 579–589. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F.; Berthias, J.P.; Broca, P.; Cerri, L. Integer ambiguity resolution on undifferenced GPS phase measure-ments and its application to PPP and satellite precise orbit determination. Navigation 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Collins, P.; Bisnath, S.; Lahaye, F.; Héroux, P. Undifferenced GPS ambiguity resolution using the decoupled clock model and ambiguity datum fixing. Navigation 2010, 57, 123–135. [Google Scholar] [CrossRef]
- Geng, J.; Meng, X.; Dodson, A.H.; Teferle, F.N. Integer ambiguity resolution in precise point positioning: Method comparison. J. Geod. 2010, 84, 569–581. [Google Scholar] [CrossRef]
- Shi, J.; Gao, Y. A comparison of three PPP integer ambiguity resolution methods. GPS Solut. 2014, 18, 519–528. [Google Scholar] [CrossRef]
- Geng, J.; Guo, J.; Chang, H.; Li, X. Towards global instantaneous decimeter-level positioning using tightly-coupled multi-constellation and multi-frequency GNSS. J. Geod. 2019, 93, 977–991. [Google Scholar] [CrossRef]
- Qi, K.; Dang, Y.; Xu, C.; Gu, S. An Improved Fast Estimation of Satellite Phase Fractional Cycle Biases. Remote Sens. 2022, 14, 334. [Google Scholar] [CrossRef]
- Xiao, G.; Sui, L.; Heck, B.; Zeng, T.; Tian, Y. Estimating satellite phase fractional cycle biases based on Kalman filter. GPS Solut. 2018, 22, 1–2. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut. 2013, 17, 223–236. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Zhang, H.; Nischan, T.; Wickert, J. The GFZ real-time GNSS precise positioning service system and its adaption for COMPASS. Adv. Space Res. 2013, 51, 1008–1018. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Shi, C.; Yi, W.; Song, W.; Lou, Y.; Yao, Y.; Zhang, R. GLONASS pseudorange inter-channel biases and their effects on combined GPS/GLONASS precise point positioning. GPS Solut. 2013, 17, 439–451. [Google Scholar]
- Geng, J.; Shi, C. Rapid initialization of real-time PPP by resolving undifferenced GPS and GLONASS ambiguities simultaneously. J. Geod. 2016, 91, 361–374. [Google Scholar] [CrossRef]
- Yi, W.; Song, W.; Lou, Y.; Shi, C.; Yao, Y.; Guo, H.; Chen, M.; Wu, J. Improved method to estimate undifferenced satellite fractional cycle biases using network observations to support PPP ambiguity resolution. GPS Solut. 2017, 21, 1369–1378. [Google Scholar] [CrossRef]
- Liu, Y.; Ye, S.; Song, W.; Lou, Y.; Gu, S. Rapid PPP ambiguity resolution using GPS+ GLONASS observations. J. Geod. 2017, 91, 441–455. [Google Scholar] [CrossRef]
- Li, P.; Zhang, X.; Guo, F. Ambiguity resolved precise point positioning with GPS and BeiDou. J. Geod. 2017, 91, 25–40. [Google Scholar]
- Liu, Y.; Ye, S.; Song, W.; Lou, Y.; Chen, D. Integrating GPS and BDS to shorten the initialization time for ambiguity-fixed PPP. GPS Solut. 2017, 21, 333–343. [Google Scholar] [CrossRef]
- Tegedor, J.; Liu, X.; Jong, K.; Goode, M.; Øvstedal, O.; Vigen, E. Estimation of Galileo Uncalibrated Hardware Delays for Ambiguity-Fixed Precise Point Positioning. Navigation 2016, 63, 173–179. [Google Scholar] [CrossRef]
- Xiao, G.; Li, P.; Sui, L.; Heck, B.; Schuh, H. Estimating and assessing Galileo satellite fractional cycle bias for PPP ambiguity resolution. GPS Solut. 2018, 23, 3. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Yuan, Y.; Zhang, K.; Zhang, X.; Wickert, J. Multi-GNSS phase delay estimation and PPP ambiguity resolution: GPS, BDS, GLONASS, Galileo. J. Geod. 2017, 92, 579–608. [Google Scholar] [CrossRef]
- Schaer, S. SINEX_BIAS-Solution (Software/technique) Independent Exchange Format for GNSS Biases Version 1.00. In Proceedings of the IGS Workshop on GNSS Biases, Bern, Switzerland, 5–6 November 2015. [Google Scholar]
- Villiger, A.; Schaer, S.; Dach, R.; Prange, L.; Sušnik, A.; Jäggi, A. Determination of GNSS pseudo-absolute code biases and their long-term combination. J. Geod. 2019, 93, 1487–1500. [Google Scholar] [CrossRef]
- Laurichesse, D.; Banville, S. Instantaneous Centimeter-Level Multi-Frequency Precise Point Positioning. GPS World, Innovation Column, 4 July 2018. Available online: www.gpsworld.com/innovation-instantaneous-centimeter-level-multi-frequency-precise-point-positioning/ (accessed on 12 August 2021).
- Banville, S.; Geng, J.; Loyer, S.; Schaer, S.; Springer, T.; Strasser, S. On the interoperability of IGS products for precise point positioning with ambiguity resolution. J. Geodesy. 2020, 94, 1–5. [Google Scholar] [CrossRef]
- Liu, G.; Guo, F.; Wang, J.; Du, M.; Qu, L. Triple-frequency GPS un-differenced and uncombined PPP ambiguity resolution using observable-specific satellite signal biases. Remote Sens. 2020, 12, 2310. [Google Scholar] [CrossRef]
- Liu, T.; Jiang, W.; Laurichesse, D.; Chen, H.; Liu, X.; Wang, J. Assessing GPS/Galileo real-time precise point positioning with ambiguity resolution based on phase biases from CNES. Adv. Space Res. 2020, 66, 810–825. [Google Scholar] [CrossRef]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products. Available online: https://kb.igs.org/hc/en-us/articles/201271873-A-Guide-to-Using-the-IGS-Products (accessed on 12 August 2021).
- Zhou, F. Theory and Methodology of Multi-GNSS Undifferenced and Uncombined Precise Point Positioning. Ph.D. thesis, East China Normal University, Shanghai, China, 2018. Ph.D. Thesis, East China Normal University, Shanghai, China, 2018. [Google Scholar]
- Yang, Y. The Principle of Equivalent Weight: The Robust Least Squares Solution of Uniformity Model of the Parameter Adjustment. Bull. Surv. Mapp. 1994, 49, 33–35. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Setting |
|---|---|
| Observation | GPS (G): L1&L2; Galileo (E): E1&E5a; BDS-3 (C): B1I&B3I |
| Orbit, clock, and ERP | CODE final products |
| DCB | Corrected for using Chinese Academy of Sciences (CAS) products |
| PCO/PCV | IGS14 atx(G/C), M20.atx(E) |
| Phase wind-up | Model correction |
| Tropospheric delay | Saastamoinen + GPT2w + Estimate |
| Ionospheric delay | IF model; Estimated as a random walk process |
| Receiver clock error | Estimated as a white noise process; one receiver clock per constellation |
| Elevation mask angle | 10° |
| Stochastic model | Elevation model |
| Solid tide, extreme tide, and ocean tide | Model correction |
| Phase ambiguity | Partial ambiguity fixing |
| Parameter estimation method | Extended Kalman Filter from SINEX (Solution INdependent EXchange Format) file)) |
| System | BDS-3 | GPS | Galileo | |||
|---|---|---|---|---|---|---|
| Frequency | B1I | B3I | L1 | L2 | E1 | E5a |
| STD (ns) | 0.035 | 0.043 | 0.014 | 0.018 | 0.014 | 0.019 |
| Institution | Orbit | Clock | Website for OSB Products |
|---|---|---|---|
| CASM (CASM_OSB) | CODE’s precise orbit | CODE’s precise clock | Not released yet |
| CNES (GBM_OSB) | GFZ’s rapid orbit | GFZ’s rapid clock | ftp://ftp.ppp-wizard.net/PRODUCTS/POST_PROCESSED/ (accessed on 20 April 2022) |
| WUM (WUM_OSB) | WUM’s precise orbit | WUM_PRIDE’s precise clock | ftp://igs.gnsswhu.cn/pub/whu/phasebias/xxxx/bias/ (accessed on 20 April 2022) |
| Static | Kinematic | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| E (cm) | N (cm) | U (cm) | T (min) | E (cm) | N (cm) | U (cm) | T (min) | |||
| G | CASM | Float | 1.0 | 0.5 | 1.4 | 33.0 | 2.3 | 1.5 | 3.9 | 58.8 |
| Fixed | 0.5 | 0.4 | 1.3 | 17.4 | 1.2 | 1.1 | 3.3 | 31.2 | ||
| CNES | Float | 0.9 | 0.4 | 1.4 | 32.5 | 2.1 | 1.5 | 3.8 | 57.0 | |
| Fixed | 0.5 | 0.4 | 1.3 | 15.5 | 1.1 | 1.1 | 3.1 | 25.2 | ||
| WUM | Float | 0.9 | 0.5 | 1.3 | 24.2 | 2.0 | 1.5 | 3.7 | 46.0 | |
| Fixed | 0.5 | 0.5 | 1.3 | 15.2 | 1.0 | 1.1 | 3.0 | 23.8 | ||
| GCE | CASM | Float | 0.7 | 0.5 | 1.4 | 15.5 | 1.4 | 0.9 | 2.9 | 22.9 |
| Fixed | 0.4 | 0.4 | 1.3 | 7.8 | 0.8 | 0.8 | 2.7 | 16.4 | ||
| CNES | Float | 0.7 | 0.4 | 1.4 | 14.0 | 1.5 | 1.0 | 3.1 | 21.5 | |
| Fixed | 0.5 | 0.4 | 1.3 | 9.0 | 0.8 | 0.8 | 2.7 | 16.0 | ||
| WUM | Float | 0.7 | 0.5 | 1.3 | 13.5 | 1.3 | 0.9 | 2.7 | 18.3 | |
| Fixed | 0.4 | 0.4 | 1.3 | 6.0 | 0.7 | 0.7 | 2.3 | 15.5 | ||
| IF | UDUC | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| E (cm) | N (cm) | U (cm) | T (min) | E (cm) | N (cm) | U (cm) | T (min) | ||
| G | Float | 1.0 | 0.5 | 1.4 | 33.0 | 1.3 | 0.6 | 1.5 | 46.9 |
| Fixed | 0.5 | 0.4 | 1.3 | 17.4 | 0.5 | 0.5 | 1.4 | 18.0 | |
| Improvement (%) | 51 | 13 | 6 | 47 | 61 | 17 | 10 | 62 | |
| GC | Float | 0.8 | 0.5 | 1.5 | 19.8 | 0.9 | 0.6 | 1.6 | 29.9 |
| Fixed | 0.5 | 0.5 | 1.3 | 11.6 | 0.5 | 0.5 | 1.5 | 13.1 | |
| Improvement (%) | 36 | 5 | 8 | 40 | 44 | 13 | 5 | 56 | |
| GE | Float | 0.8 | 0.5 | 1.4 | 19.9 | 0.9 | 0.6 | 1.4 | 29.6 |
| Fixed | 0.4 | 0.4 | 1.3 | 9.1 | 0.5 | 0.5 | 1.4 | 11.1 | |
| Improvement (%) | 52 | 14 | 4 | 54 | 50 | 16 | 5 | 62 | |
| GCE | Float | 0.7 | 0.5 | 1.4 | 15.5 | 0.8 | 0.6 | 1.4 | 22.8 |
| Fixed | 0.4 | 0.4 | 1.3 | 7.8 | 0.4 | 0.5 | 1.4 | 9.2 | |
| Improvement (%) | 45 | 14 | 5 | 50 | 45 | 17 | 4 | 60 | |
| IF | UDUC | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| E (cm) | N (cm) | U (cm) | T (min) | E (cm) | N (cm) | U (cm) | T (min) | ||
| G | Float | 2.3 | 1.5 | 3.9 | 58.8 | 2.6 | 1.7 | 4.2 | 78.5 |
| Fixed | 1.2 | 1.1 | 3.3 | 31.2 | 1.2 | 1.2 | 3.3 | 34.9 | |
| Improvement (%) | 49 | 27 | 16 | 47 | 54 | 30 | 22 | 56 | |
| GC | Float | 1.5 | 1.1 | 3.2 | 31.3 | 1.7 | 1.3 | 3.4 | 49.1 |
| Fixed | 1.0 | 1.0 | 3.0 | 17.7 | 1.1 | 1.1 | 3.2 | 20.3 | |
| Improvement (%) | 33 | 10 | 7 | 44 | 37 | 18 | 6 | 59 | |
| GE | Float | 1.7 | 1.1 | 3.3 | 31.5 | 1.9 | 1.2 | 3.4 | 49.3 |
| Fixed | 0.9 | 0.9 | 2.8 | 19.0 | 1.0 | 1.0 | 2.9 | 21.4 | |
| Improvement (%) | 49 | 18 | 14 | 40 | 47 | 20 | 15 | 57 | |
| GCE | Float | 1.4 | 0.9 | 2.9 | 22.9 | 1.5 | 1.0 | 3.0 | 31.5 |
| Fixed | 0.8 | 0.8 | 2.7 | 16.4 | 0.9 | 0.9 | 2.8 | 16.4 | |
| Improvement (%) | 40 | 16 | 9 | 28 | 38 | 11 | 8 | 48 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Mi, J.; Zhu, H.; Gu, S.; Xu, Y.; Wang, H.; Yang, L.; Chen, Y.; Pang, Y. BDS-3/GPS/Galileo OSB Estimation and PPP-AR Positioning Analysis of Different Positioning Models. Remote Sens. 2022, 14, 4207. https://doi.org/10.3390/rs14174207
Li B, Mi J, Zhu H, Gu S, Xu Y, Wang H, Yang L, Chen Y, Pang Y. BDS-3/GPS/Galileo OSB Estimation and PPP-AR Positioning Analysis of Different Positioning Models. Remote Sensing. 2022; 14(17):4207. https://doi.org/10.3390/rs14174207
Chicago/Turabian StyleLi, Bo, Jinzhong Mi, Huizhong Zhu, Shouzhou Gu, Yantian Xu, Hu Wang, Lijun Yang, Yibiao Chen, and Yuqi Pang. 2022. "BDS-3/GPS/Galileo OSB Estimation and PPP-AR Positioning Analysis of Different Positioning Models" Remote Sensing 14, no. 17: 4207. https://doi.org/10.3390/rs14174207