
A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies

 ,
,  ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
- In addition to an extensive study of the existing academic research, this paper presents a comprehensive UAV classification taxonomy covering gaps not considered in previous surveys.
- A comprehensive effort specifically discusses FANET characteristics and applications, connecting them to the most commonly used routing protocols, UAV mobility models, and Cloud-based UAV Managing Systems (CBUMS).
- A prospective discussion is presented on current investigations of emerging technologies integrated with FANETs and the possibilities they can open for future applications.
2. UAV Classification
- Military (Figure 2, box A): With continuing advancements in UAVs technology, defence forces around the world increasingly use UAVs for a variety of applications, including logistics, surveillance, communications, attack, and combat. Figure 2, box A shows military applications of UAVs. Famous drone types used in military applications include the RQ-4 Global Hawk, RQ-2A PioneerRQ-2A Pioneer, QF-4 Aerial TargetQF-4 Aerial Target, R-MQ-8 Fire ScoutR/MQ-8 Fire Scout, RQ-7B ShadowRQ-7B Shadow, RQ-11B RavenRQ-11B Raven, MQ-9 ReaperMQ-9 Reaper, and MQ-1B Predator (https://www.military.com/equipment/drones accessed on 21 July 2022).
- Medical Applications (Figure 2, box B): Recently, UAVs have begun to be employed in medical startups. According to Figure 2, box B, they have been used for search and rescue when a natural disaster suddenly happens, for transport and delivery of medications, first aid kits, and laboratory samples, and for remote telemedicine and teleradiology services [29,30,31,32,33]. The most promising UAVs for near-future applications in healthcare are Seattle’s VillageReach (https://www.villagereach.org/ accessed on 21 July 2022), used for transportation of blood samples from one hospital to another; Flirtey (https://getskydrop.com/ accessed on 21 July 2022), used for delivery of first aid kits; EHang (https://www.ehang.com/index.html accessed on 21 July 2022), used to transport donated organs to people for use in emergency situations; ZipLine (https://flyzipline.com/ accessed on 21 July 2022), used for blood transportation; TU Delft (https://www.tudelft.nl/io/onderzoek/research-labs/applied-labs/ambulance-drone accessed on 21 July 2022), which is an ambulance UAV sent to bystanders near a patient to teach them how to perform CPR and use its in-built automatic defibrillator until emergency services arrive to take over; and Google Drones, which can provide people in distress with medical aid before an ambulance can arrive there; other autonomous UAVs for use in healthcare applications include Project Wing (https://x.company/projects/wing/ accessed on 21 July 2022), Healthcare Integrated Rescue Operations (HiRO) (https://ieee-aess.org/hiro-healthcare-integrated-rescue-operations accessed on 21 July 2022), and Vayu Drones (https://www.engineeringforchange.org/solutions/product/vayu-drones-for-medical-delivery/ accessed on 21 July 2022).
- Agriculture (Figure 2, box C): Recently, UAVs integrated with the IoT paradigm have found wide use in intelligent agriculture. As shown in to Figure 2, box C, UAVs are employed in many agriculture applications. UAVs equipped with flight planning software automatically take pictures using onboard sensors and the built-in camera to allow users to perform mapping analyses of an area. UAVs are capable of planting seeds and seedlings, harvesting crops, and detecting infestations and weed. In addition, they can spray crops more accurately than a traditional tractor [34,35,36]. By applying ML techniques to real-time data gathered by UAVs, parameters such as plant disease detection and soil moisture [37], minimum and maximum temperatures at field level [38], and the level of phosphorus in the soil [39] can be predicted. Using UAVs in agriculture can reduce costs as well as potential pesticide exposure to workers. Of the numerous types of agricultural drones on the market, among the most widely used are the PrecisionHawk DJI Matrice 200 v2 (https://www.dji.com/br/matrice-200-series-v2 accessed on 21 July 2022), the senseFly eBee SQ (https://www.sensefly.com/blog/talking-ebee-sq-agriculture-drone/ accessed on 21 July 2022), and the Sentera PHX Complete System (https://sentera.com/data-capture/phx/ accessed on 21 July 2022).
- Wireless Coverage (Figure 2, box D): UAVs that are equipped with directional antennae are used to provide wireless coverage for both indoor and outdoor users in dense environments or when terrestrial BSs are out of service due to bad weather conditions [40]. However, there are outstanding issues, such as finding the minimum number and optimal deployment of aerial wireless BSs or cellular-connected UAVs to maximize the total coverage area. Moreover, providing an optimal A2G path loss model is required for aerial wireless BSs [41,42,43].
- Environment and Climate (Figure 2, box E): UAVs can be used to help the environment in a wide variety of way; Figure 2, box E shows applications of UAVs in the mining industry [44,45], aerial mapping, nature monitoring [46,47,48], wildlife protection [49,50], forest fire detection [51], prediction of rising sea levels [52,53], renewable energy maintenance, disaster relief [54], climate change forecasting [55], the potential of space drones for exploring other planets [56], marine drones that can study marine organisms and identify the location of oil spills [57], tree-planting, clean energy, and solar power generation [58,59].
- Delivery and transportation (Figure 2, box F): As shown in Figure 2, box F, delivery UAVs can be used to transport food, medical supplies, household items, and packages, as well as for ship resupply [40,60]. The Federal Aviation Administration (FAA) has proposed airworthiness criteria for type certification of delivery drones for commercial operations, which in 2020 covered ten drone manufacturers, Amazon Prime Air, Zipline, and Wingcopter among them (https://www.faa.gov/newsroom/faa-moving-forward-enable-safe-integration-drones?newsId=96138 accessed on 21 July 2022).
- Construction (Figure 2, box G): In construction applications, UAVs can be utilized for technical inspection, painting, safety, and delivery. Inspector UAVs equipped with high-resolution digital cameras are employed for progress monitoring, technical inspection of construction sites and buildings, and quality control [60,61]. Delivery UAVs with high-performance rotors and robust frames are used to carry material, tools, and payloads to workers at heights. Builder UAVs can be connected to paint reservoirs and onboard compression pumps for painting applications, and Safety UAVs with infrared and visual sensors are used to monitor and detect safety issues in construction [62,63,64].
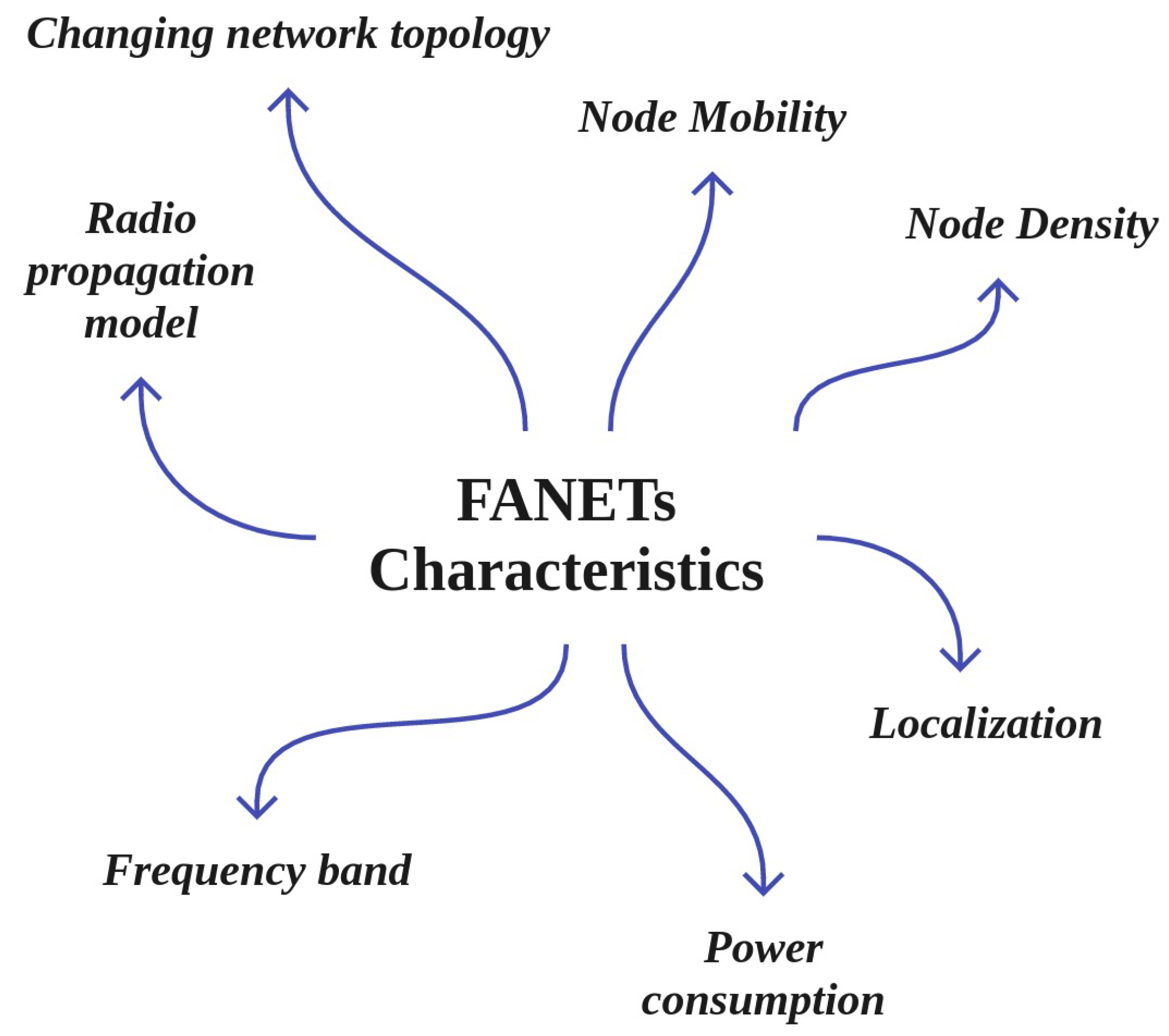
3. Main Characteristics of FANETs
- Node Density: The average number of UAVs per unit volume is the node density. The node density of UAVs in FANETs is less than in other ad hoc networks such as MANET and VANET. The node density can be varied according to the objective of the UAVs mission.
- Node Mobility: Node mobility is one of the main features of FANETs; it is very high compared to VANET and MANET. UAV speed varies from 30 to 460 km/h depending on the type of UAV. This can causes issues, including disruptions, link failure, and more [69].
- Changing network topology: The network topology in FANETs undergoes frequent changes due to the rapid movements of UAVs. Possible FANET topologies under conditions of frequent topological fluctuation include star topology, in which all UAVs directly communicat with the ground control station (GCS), and mesh topology, in which dynamic routing is necessary. Both the star and mesh network topologies have advantages and disadvantages; for example, with star network topologies, the dedicated link between each UAV and GCS fluctuates due to the high speed of UAVs, which can affects data exchange [66,70,71].
- Radio propagation model: A crucial element when designing and simulating any communications system is the radio propagation model employed in the network. The simplest and most popular propagation model used in simulation tests is the Friis free space model. This model only uses the distance and frequency of the signal, which has corresponding limitations [72]. A UAV-to-Ground (U2G) communication channel is a widely used channel model in the literature. The different types of propagation models can be categorized [73] as follows:
- –
- Theoretical models: These models provide a detailed propagation model of U2G or U2U channels for UAV network scenarios.
- –
- Empirical models: These models are obtained from a series of measurements made in various rural or urban scenarios.
- –
- Semi-empirical models: These models are initiated as theoretical models and then varied according to a set of measures to match reality.
- –
- Well-known models: These models attempt to verify the sufficiency of already-known propagation models in UAV network scenarios.
- Localization: FANETs take advantage of low-latency global positing (GPS) to locate UAVs to compensate for their high speed and mobility and the resulting network topology changes. Localization in FANETs can be based on network positioning, height, assisted GPS (AGPS), or differential GPS (DGPS) [66,74].
- Power consumption and network lifetime: Energy constraints represent a critical issue in ad hoc networks. Power consumption in FANETs depends on the size of the UAVs, the distances involved, the communication hardware of the FANET and the link, and other hindrances. Sensor and actuator nodes play a vital role in the power consumption of FANETs; lowering the requirements of power-sensitive devices in FANETs can directly improve network lifetime and reduce network breakdowns [66,74].
- Frequency band: Unlicensed bands such as 0.9 GHz and 2.4 GHz are widely used in UAV communication systems. However, using these bands can cause congestion. The frequency of 5 GHz integrated with IEEE 802.11a provides the best result for UAV-to-Ground links. Avoiding interference with other bands is best at 5.9 GHz with IEEE 802.11p [66].
4. Main Applications of FANETs
- Multi-UAV cooperation: Figure 4, box A shows the following applications, which can be categorized as multi-UAV cooperation:
- –
- –
- Tracking and monitoring in disaster situations: UAVs can help to assess the direction in which a flood is moving, then predict what buildings are exposed to damage. Similarly, they can be used for rescue operations in the aftermath of earthquakes, identifying collapsed population-dense buildings such as hospitals and schools so that these areas are given a higher priority in rescue operations [76,77].
- –
- Emergency situations: UAVs are used in the construction industry to check safety and to monitor the progress of construction and buildings. UAVs can be used to provide temporary wireless coverage in cellular networks during emergencies when the ground base stations are out of service, as well as in many other emergency scenarios [33,54].
- UAV-to-Ground tasks: Figure 4, box B shows the following applications for UAV-to-ground cooperation:
- –
- Public and civilian applications: UAVs have been widely used for public and civilian domain applications, especially in the form of small quadcopters, as their cost effectiveness and flexibility provide advantages over ground-based infrastructure [78].
- –
- Search and rescue missions: UAVs play a vital role in search and rescue missions (SAR). FANETs are considered an immense advantage in guaranteeing public safety, performing SAR missions, and managing man-made or natural disasters such as floods, earthquakes, forest fires, tsunamis, terrorist attacks, and checking the safety of critical infrastructure such as power and water utilities. It is important to provide communications coverage in such situations. In situations when public communications networks are disrupted, UAVs can provide timely disaster warnings and help to speed up rescue and recovery operations. UAVs can carry medical equipment to inaccessible regions. They can make SAR operation much faster in situations such as avalanches, wildfires, searching for missing persons, and more.
- UAV-to-VANET collaborations between UAVs and vehicles: As shown in Figure 4, box C, the following applications involve cooperation between UAVs and vehicles:
- –
- Roadway traffic monitoring: FANETs can be employed instead of intensive labour and complex observational infrastructure to carry out road traffic monitoring. In roadway traffic monitoring, UAVs are able to detect traffic crashes and then report these incidents easily. Using UAVs is much faster than using the incident commander’s vehicle. In addition, UAVs can be used to provide road safety by capturing real-time videos from various security scenarios and situations in road networks [79].
- –
- Data packet delivery: Data delivery to mobile ad hoc nodes is a challenging task, as it is difficult to find a reliable forwarding path to ensure that data is delivered from one user to another. In this respect, UAVs are widely used as airborne communication relays to deliver data collected by ground devices to distant control centres. In other words, UAVs deliver packet data based on the load-carry-and-delivery (LCAD) paradigm, in which data is loaded from the source node and forwarded to the destination node utilizing multiple UAVs [80,81].
- –
5. FANET Routing Protocols
- Position-based (Figure 5, box A): In these protocols, the geographic information of the nodes is known from GPS, and the positions of the sender and receiver are determined in advance using reactive, predictive, greedy [84], and hierarchical [85,86,87] methods, as shown in Figure 5, box A. The position-based hop by hop protocols usually dynamically select relay nodes. The packets are broadcast blindly by the node, and the selection of the relay is postponed until the neighbours of the node receive the packets. After the neighbours receive the packets, they calculate the dynamic forwarding delay (DFD) values according to their local position information in a distributed manner and then forward the packets to the destination greedily.The nodes closest to the destination then acquire the minimum DFD value and become the next forwarder [88].
- Topology-based (Figure 5, box B): In topology-based hop by hop routing protocols, the senders forward packets through an optimal path using the network’s topology information along with link- state information such as IP address [89]. As shown in to Figure 5, box B, these can be classified as static [90], proactive [91], reactive [92], and Hybrid.
- Delay-tolerant networks (DTNs) (Figure 5, box C): In DTNs, the mobile nodes are intermittently and unstably connected. As the mobile nodes experience high latency and low data rates, new routing protocols are needed to address the DTN characteristics [66]. The three main DTN-based routing protocols studied for FANETs are deterministic, social network, and stochastic [66], which are depicted in Figure 5, box C.
- Heterogeneous (Figure 5, box D): FANETs interact with various ground networks, such as VANETs, MANETs, or fixed nodes, in which heterogeneous routing protocols are required for exchanging data between moving users. Routing protocols with heterogeneous techniques can support both mobile and fixed nodes in FANETs [93]. This technique can provide sub-network assistance coverage for both nodes on the ground and UAVs, network extension, and more [94]. The classification of heterogeneous routing protocols is shown in Figure 5, box D.
- Cluster-based (Figure 5, box E): In the clustering technique, nodes with similar characteristics and features are combined to form clusters. There is a cluster head in each cluster that carries out communication processing [95]. As shown in Figure 5, box E, cluster-based routing protocols in FANETs can be classified into two main categories, namely, probabilistic and deterministic. A full classification of cluster-based routing protocols in FANETs is shown in Figure 5, box E.
6. UAV Mobility Models
7. Integration of Technologies with the UAV-Networked Systems
- Augmented reality (AR) and Virtual Reality (VR) technologies (Figure 6, box A): VR, which is shown in Figure 6, box A, has been integrated with UAV-networked systems for greater integration of the virtual and real worlds. Such integration can create a virtual environments for multiple purposes, including marketing, agriculture, entertainment, education, and more, by taking over people’s vision and making them feel as if they are somewhere else. AR is considered a variation of VR; VR technology, there is an essential need for 3D data on a large scale. In this regard, UAVs that can freely fly in the sky are excellent tools for collecting 3D data. Several studies have investigated the use of VR technology and UAV networks [5,6,7,8,9]. The main challenges of UAV-enabled VR include the low battery lifetime and computing capacity of VR users, which in turn cause issues with content caching and transmission. VR applications need a high data rate and low latency. In this regard, AI and ML techniques bring together novel NN ideas from echo state networks (ESNs) and the liquid state machine (LSM), which can enable user reliability prediction in order to find the optimal content level for transmission and caching [7,101,102].
- IoT-enabled UAV communication system (Figure 6, box B): The integration of UAVs with IoT is called the Internet of Flying Things (IoFT) [10,11] or Internet of Drone Things (IoDT) [12]. IoFT or IoDT represents a new research topic related to IoT, cellular networks, cloud, fog, and edge computing, big data, intelligent computer vision, and security techniques. IoFT or IoDT can efficiently support different applications in various fields ranging from disaster management to smart industry, providing high connectivity, scalability, flexibility, and availability. Although integrating UAVs with IoT improves the scalability, connectivity, stability, reliability, and security of real-time IoT applications, there are several open challenges, including interference and collision, UAV selection and placement, UAV control and management, security issues, the power limitations of IoT devices, path planning, and more [66,103,104,105,106,107,108].
- Integration with Cloud Computing (Figure 6, box C): As shown in Figure 6, box C, cloud computing has been integrated with FANETs; known as cloud-based UAV or flying cloud computing, this can improve and increase storage, network bandwidth, and processing. Such an integrated system includes three main layers: a UAV layer, a cloud server layer, and a ground control system (GCS)/client layer. The UAV layer collects sensor data such as pressure, temperature, etc., while flying and transmits the collected data to the cloud for storage and processing using 3G/4G/5G cellular communication devices or other technologies such as WiMAX, WiFi, etc. The communication layer is responsible for providing wireless connectivity for the UAVs and GCS any time and anywhere without any limitations on communication range. The last layer contains the cloud servers that store and process different types of data, such as geographical location parameters, environment variables, sensor data, images, etc., received from the UAVs to detect various events [10,109,110,111]. Although flying cloud computing provides many advantages in addition to the existing challenges in traditional FANETs, new issues arise as well. The major challenges that appear in cloud-based applications include large bottlenecks, latency due to centralized processing, lack of offline processing, and security issues. These challenges can be mitigated by edge and fog computing in a distributed manner, with storage and processing of the data carried out near the places where the data are generated. Therefore, integrating edge and fog computing with UAVs can provides better results in certain cases [14].
- Flying Edge Computing (Figure 6, box D): Edge computing allows data storage and computing closer to the sources of data. Edge computing has been integrated with FANET (flying edge computing) to mitigate the hardware limitations of UAVs and improve the performance of UAV networks [13]. Flying edge computing is employed to support real-time IoT applications such as video streaming surveillance, VR and AR, and smart transportation [112]. In flying edge computing, UAVs are associated with edge IoT devices such as GBSs to offload and migrate part of the data computation to the edge layer; the other parts of computation tasks are locally managed by the UAVs [113] without the intervention of the cloud [114]. Integrating UAVs with edge computing provides low latency and response time for different IoT real-time applications. However, certain applications require storage and computing of voluminous data such as video streams. The local resources of edge IoT devices cannot efficiently support such cases. Therefore, flying fog computing can be expanded to the core network to provide low latency for storage and processing of huge amounts of UAV data [10].
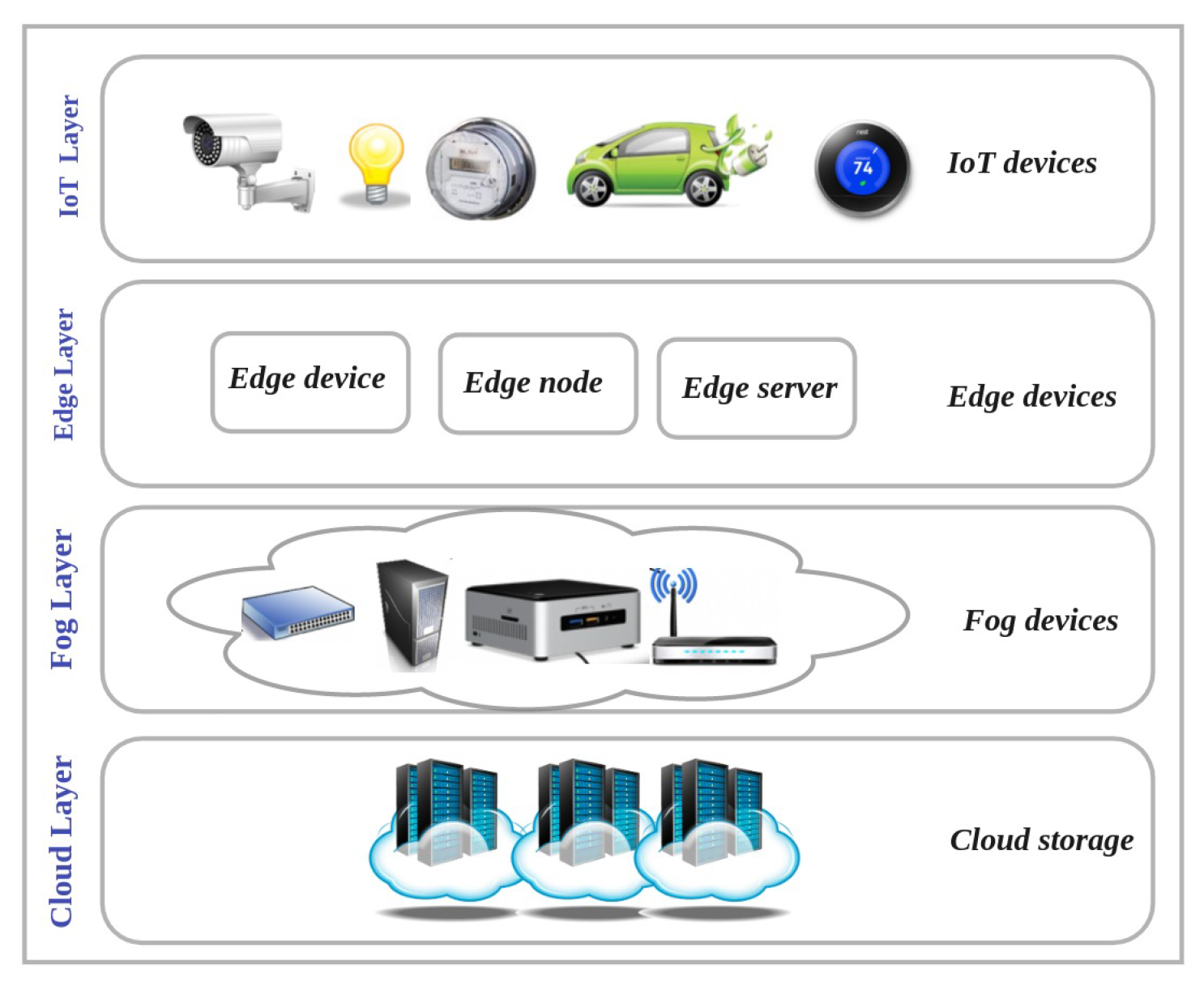
- Flying Fog Computing (Figure 6, box E): Flying fog computing, which is located at the edge of the network, provides an intermediate level between the cloud and UAV layers. The fog layer communicates with the UAV layer through wireless connection and the cloud layer using the internet. The integration of fog computing and UAVs provides low latency for real-time UAV-assisted IoT applications along with high capacity in terms of computing and storage. Although the flying fog computing paradigm provides enough computing power for IoT nodes, a major issue involves the integration of the UAVs in the edge computing layer with the cloud computing layer [10,14,15]. Figure 7 shows the cloud, fog, edge, and IoT layers.
- Integrating UAVs into cellular networks (Figure 6, box F): Agile UAVs are a special class of lightweight fixed-wing UAVs with small control surfaces [115]; they can be used as flying base stations, mobile relays, users, sensors, network controllers, and even as a scheduler in a cellular network [16], providing high reliability and low latency in communications. In UAV-based cellular networks, UAVs are mostly equipped with small BSs to provide temporary required communication links and cover the hard-to-reach regions. These flying BSs are more adaptive, flexible, and cost-effective than conventional towers or pole-mounted or rooftop BSs [17]. However, cellular networks have limitations in terms of supporting UAV communications. For example, optimally deploying UAVs is one of the most challenging issues in this context [18,19]. Therefore, new communication technologies such as 5G and 6G that support aerial and satellite communication are needed to manage UAV traffic in very dense air traffic scenarios [77,103,116,117]. There are challenges with integrating 5G and 6G with FANETs, which can suffer from issues and is a very complex task with many technical issues which need to be addressed [66].
8. Main Components of Cloud-Based UAV Managing Systems (CBUMS)
- UAV Layer: As shown in Figure 8, in the UAV layer (i.e., the physical layer), UAVs that are connected with the IoT cloud using short- and long-range wireless technologies can perform different tasks, ranging from traffic monitoring to delivery. The cloud layer sends control information and signals about the traffic situation to the UAV layer to guide responses based on the desired GBS in the control layer. In the UAV layer, multiple network components such as drone-to-target (D2T) and drone-to-drone (D2D) are attached [20,118].
- Cloud Layer: The cloud layer, which is the heart of CBUMS, transfers the data between the UAV and control layers. As can be seen in Figure 8, the storage, computation, ML techniques, and interface are the main components of the cloud layer [20,118].Storage: The cloud layer captures streams of data about the location, environment, and UAV mission information, storing the captured data in a regular SQL database or NoSQL database based on the application’s requirements.Calculations and ML techniques: Several computation algorithms, such as map/reduce, data analytics, image processing, ML techniques (including supervised and unsupervised learning algorithms), RL and DRL-based algorithms, and FL-based techniques are executed in the cloud to improve the system performance and fix existing open issues.Interface: The interface contains web and network services that make connections between control and UAV layers. Interfaces in the cloud layer take advantage of various communication protocols, including wireless personal area networks (WPAN), wireless local area networks (WLAN), low-power wide-area networks (LPWAN), and cellular networks. In applications that require UAVs to directly communicate with the central station, a WiFi transmission system is used. However, long-term evolution (LTE) and long-range area networks (LPWAN) provide lower-latency communication systems than WIFi.
- Control Layer: As Figure 8 shows, the control layer includes GCSs that remotely register, control, manage, and monitor UAVs from a location close to or inside the flying field. The GCS contains application software that receives collected data from UAVs and sends control signals to them. The users can monitor UAVs, set task parameters, and modify them through the data analysis implemented by the cloud based on the application software [20,118].
9. Simulation Tools
10. Future Prospects
11. Conclusions
- UAV classification: UAVs can be classified based on size, weight, altitude, range and endurance, application, flying mechanisms, air class, degree of autonomy, ownership, and type of engine.
- Main Characteristics of FANETs: Node density, node mobility, changing network topology, communication range, radio propagation model, localization, power consumption, frequency band, cost-efficiency, versatility, agility, and network lifetime are the main characteristics of FANETs.
- Main Applications of FANETs: The applications of FANETs can be classified into three main categories: Multi-UAV cooperation (e.g., target detection/tracking, area monitoring, and surveillance), UAV-to-ground tasks (e.g., relay networking, provision of on-demand base stations for mobile communication, intermittent networking), and UAV-to-VANET collaborations (e.g., roadway traffic monitoring, data packet delivery, route guidance).
- FANET routing protocols: FANET routing protocols can be classified into six main categories: position-based, topology-based, delay-tolerant networks (DTNs), heterogeneous, cluster-based, and swarm-based.
- UAV Mobility models: The mobility models used by FANETs consist of pure randomized mobility models, time-dependent mobility models, path-based mobility models, group mobility model, and topology control mobility models.
- Integration of other technologies with UAV-networked systems: UAVs have been integrated with various technologies, including augmented and virtual reality, IoT, cloud computing, fog and edge computing, cellular networks, and intelligent reflective surfaces.
- Main components of CBUMS: Cloud-based UAV managing systems includes three main layers: the UAV layer, cloud layer, control layer.
- Simulation Tools: The available FANET performances analysis tools include AVENS, CUSCUS, Simbeeotic, UAVSim, UTSim, FANETSim, Netsim, OMNeT++, NS2,NS3, OPNET, ROS-NetSim, MATLAB, TOSSIM, QualNet, GloMoSim, YANS, ONE, SSFNet, FlynetSim, J-Sim, BonnMotion, GAZEBO, AirSim, RoboNetSim, Mininet-Wifi, and SUMO, each of which support different mobility models, operating systems, and programming languages
- Future Directions: When integrating new technologies with UAV-based communications, there remain several significant open challenges that need to be addressed, including the energy limitations of UAVs, the need for dynamic management of various resources (bandwidth, transmitting power, number of UAVs, UAV flight time), and the FANET security.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Unmanned Aerial Vehicle | UAV |
| Flying Ad Hoc Network | FANETs |
| Virtual Reality | VR |
| Internet of Things | IoT |
| Drone-mounted base station | DBS |
| Machine learning | ML |
| Artificial intelligence | AI |
| Deep learning | DL |
| Software Defined Network | SDN |
| Network function Virtualization | NFV |
| Quantum Annealing | QA |
| Intelligent reflective surfaces | IRS |
References
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Chriki, A.; Touati, H.; Snoussi, H.; Kamoun, F. FANET: Communication, mobility models and security issues. Comput. Netw. 2019, 163, 106877. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking Models in Flying Ad-Hoc Networks (FANETs): Concepts and Challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Sultan, L.; Anjum, M.; Rehman, M.; Murawwat, S.; Kosar, H. Communication Among Heterogeneous Unmanned Aerial Vehicles (UAVs): Classification, Trends, and Analysis. IEEE Access 2021, 9, 118815–118836. [Google Scholar] [CrossRef]
- Lahmeri, M.A.; Kishk, M.A.; Alouini, M.S. Artificial Intelligence for UAV-Enabled Wireless Networks: A Survey. IEEE Open J. Commun. Soc. 2021, 2, 1015–1040. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, F.; Pun, C.M.; Yang, Y.; Lan, R.; Wang, L.; Li, Y.; Gao, H. Virtual Reality Aided High-Quality 3D Reconstruction by Remote Drones. ACM Trans. Internet Technol. 2021, 22, 1–20. [Google Scholar] [CrossRef]
- Zhou, Y.; Pan, C.; Yeoh, P.L.; Wang, K.; Elkashlan, M.; Vucetic, B.; Li, Y. Communication-and-Computing Latency Minimization for UAV-Enabled Virtual Reality Delivery Systems. IEEE Trans. Commun. 2021, 69, 1723–1735. [Google Scholar] [CrossRef]
- Le, N.T.T.; Zhu, H.Y.; Chen, H.T. Remote Visual Line-of-Sight: A Remote Platform for the Visualisation and Control of an Indoor Drone Using Virtual Reality. In Proceedings of the VRST’21, 27th ACM Symposium on Virtual Reality Software and Technology, Osaka Japan, 8–10 December 2021; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- AL-BAHRI, M.; Al Kishri, W.; Dharamshi, R.R. Implementation of Augmented Reality and Drones to Serve Smart Cities. Artif. Intell. Robot. Dev. J. 2021, 1, 147–157. [Google Scholar] [CrossRef]
- Zaidi, S.; Atiquzzaman, M.; Calafate, C.T. Internet of Flying Things (IoFT): A Survey. Comput. Commun. 2021, 165, 53–74. [Google Scholar] [CrossRef]
- Singh, B.; Singh, N.; Kaushish, A.; Gupta, N. Optimizing IOT Drones using Cellular Networks. In Proceedings of the 2020 12th International Conference on Computational Intelligence and Communication Networks (CICN), Bhimtal, India, 25–26 September 2020; pp. 192–197. [Google Scholar] [CrossRef]
- Nayyar, A.; Nguyen, B.L.; Nguyen, N.G. The Internet of Drone Things (IoDT): Future Envision of Smart Drones. In Proceedings of the First International Conference on Sustainable Technologies for Computational Intelligence; Luhach, A.K., Kosa, J.A., Poonia, R.C., Gao, X.Z., Singh, D., Eds.; Springer: Singapore, 2020; pp. 563–580. [Google Scholar]
- Callegaro, D.; Baidya, S.; Levorato, M. A Measurement Study on Edge Computing for Autonomous UAVs. In Proceedings of the ACM SIGCOMM 2019 Workshop on Mobile AirGround Edge Computing, Systems, Networks, and Applications, Beijing, China, 19 August 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 29–35. [Google Scholar] [CrossRef]
- Uddin, M.A.; Ayaz, M.; Mansour, A.; Aggoune, e.H.M.; Sharif, Z.; Razzak, I. Cloud-connected flying edge computing for smart agriculture. Peer-Peer Netw. Appl. 2021, 14, 3405–3415. [Google Scholar] [CrossRef]
- Faraci, G.; Grasso, C.; Schembra, G. Fog in the Clouds: UAVs to Provide Edge Computing to IoT Devices. ACM Trans. Internet Technol. 2020, 20, 1–26. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutorials 2019, 21, 3417–3442. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, L.; Zhu, L.; Zhang, T.; Xiao, Z.; Xia, X.G. 3D Deployment of Multiple UAV-Mounted Base Stations for UAV Communications. IEEE Trans. Commun. 2021, 69, 2473–2488. [Google Scholar] [CrossRef]
- Wang, H.; Zhao, H.; Wu, W.; Xiong, J.; Ma, D.; Wei, J. Deployment Algorithms of Flying Base Stations: 5G and Beyond With UAVs. IEEE Internet Things J. 2019, 6, 10009–10027. [Google Scholar] [CrossRef]
- Nguyen, D.D. Cloud-Based Drone Management System in Smart Cities. In Development and Future of Internet of Drones (IoD): Insights, Trends and Road Ahead; Krishnamurthi, R., Nayyar, A., Hassanien, A.E., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 211–230. [Google Scholar] [CrossRef]
- Sami Oubbati, O.; Atiquzzaman, M.; Ahanger, T.A.; Ibrahim, A. Softwarization of UAV Networks: A Survey of Applications and Future Trends. IEEE Access 2020, 8, 98073–98125. [Google Scholar] [CrossRef]
- Amici, C.; Ceresoli, F.; Pasetti, M.; Saponi, M.; Tiboni, M.; Zanoni, S. Review of Propulsion System Design Strategies for Unmanned Aerial Vehicles. Appl. Sci. 2021, 11, 5209. [Google Scholar] [CrossRef]
- Katikala, S. Google project loon. InSight Rivier Acad. J. 2014, 10, 1–6. [Google Scholar]
- Brandt, T. Zeppelin NT-The Utility Airship Zeppelin NT as a Platform for Remote Sensing for Environmental and Industrial Applications. In Proceedings of the 7th AIAA ATIO Conf, 2nd CEIAT Int’l Conf on Innov and Integr in Aero Sciences, 17th LTA Systems Tech Conf, Followed by 2nd TEOS Forum, Belfast, UK, 18–20 September 2007; p. 7879. [Google Scholar]
- Smith, I.; Lee, M.; Fortneberry, M.; Judy, R. HiSentinel80: Flight of a high altitude airship. In Proceedings of the 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference, including the AIAA Balloon Systems Conference and 19th AIAA Lighter-Than, Virginia Beach, VA, USA, 20–22 September 2011; p. 6973. [Google Scholar]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Intwala, A.; Parikh, Y. A review on vertical take off and landing (vtol) vehicles. Int. J. Innov. Res. Adv. Eng. (IJIRAE) 2015, 2, 187–191. [Google Scholar]
- Heath-Smith, J. Turbulence Encountered by Viking Aircraft over Europe. 1957. Available online: https://reports.aerade.cranfield.ac.uk/bitstream/handle/1826.2/324/arc-cp-0311.pdf?sequence=1 (accessed on 21 July 2022).
- van Veelen, M.J.; Kaufmann, M.; Brugger, H.; Strapazzon, G. Drone delivery of AED’s and personal protective equipment in the era of SARS-CoV-2. Resuscitation 2020, 152, 1–2. [Google Scholar] [CrossRef]
- EUCHI, J. Do drones have a realistic place in a pandemic fight for delivering medical supplies in healthcare systems problems? Chin. J. Aeronaut. 2021, 34, 182–190. [Google Scholar] [CrossRef]
- Nyaaba, A.A.; Ayamga, M. Intricacies of medical drones in healthcare delivery: Implications for Africa. Technol. Soc. 2021, 66, 101624. [Google Scholar] [CrossRef]
- Rosser, J.C.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and Medical Applications of Drones: A Comprehensive Review. JSLS J. Soc. Laparoendosc. Surg. 2018, 22, e2018.00018. [Google Scholar] [CrossRef]
- Pulsiri, N.; Vatananan-Thesenvitz, R. Drones in emergency medical services: A Systematic literature review with bibliometric analysis. Int. J. Innov. Technol. Manag. 2021, 18, 2097001. [Google Scholar] [CrossRef]
- Chen, H.; Lan, Y.; Fritz, B.K.; Hoffmann, W.C.; Liu, S. Review of agricultural spraying technologies for plant protection using unmanned aerial vehicle (UAV). Int. J. Agric. Biol. Eng. 2021, 14, 38–49. [Google Scholar] [CrossRef]
- Maddikunta, P.K.R.; Hakak, S.; Alazab, M.; Bhattacharya, S.; Gadekallu, T.R.; Khan, W.Z.; Pham, Q.V. Unmanned aerial vehicles in smart agriculture: Applications, requirements, and challenges. IEEE Sens. J. 2021, 21, 17608–17619. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Pasandideh, F.; Ray, B.; Moore, S.; Kadel, R. A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming. Sustainability 2021, 13, 1821. [Google Scholar] [CrossRef]
- Gao, J.; Nuyttens, D.; Lootens, P.; He, Y.; Pieters, J.G. Recognising weeds in a maize crop using a random forest machine-learning algorithm and near-infrared snapshot mosaic hyperspectral imagery. Biosyst. Eng. 2018, 170, 39–50. [Google Scholar] [CrossRef]
- Aliev, K.; Pasero, E.; Jawaid, M.M.; Narejo, S.; Pulatov, A. Internet of plants application for smart agriculture. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 421–429. [Google Scholar] [CrossRef]
- Estrada-López, J.J.; Castillo-Atoche, A.A.; Vázquez-Castillo, J.; Sánchez-Sinencio, E. Smart Soil Parameters Estimation System Using an Autonomous Wireless Sensor Network With Dynamic Power Management Strategy. IEEE Sens. J. 2018, 18, 8913–8923. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Sawalmeh, A.; Othman, N.S.; Liu, G.; Khreishah, A.; Alenezi, A.; Alanazi, A. Power-Efficient Wireless Coverage Using Minimum Number of UAVs. Sensors 2022, 22, 223. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Shakhatreh, H.; Khreishah, A.; Guo, X.; Ansari, N. Efficient Deployment of UAVs for Maximum Wireless Coverage Using Genetic Algorithm. In Proceedings of the 2018 IEEE 39th Sarnoff Symposium, Newark, NJ, USA, 24–25 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Khreishah, A.; Othman, N.S.; Sawalmeh, A. Maximizing indoor wireless coverage using UAVs equipped with directional antennas. In Proceedings of the 2017 IEEE 13th Malaysia International Conference on Communications (MICC), Johor Bahru, Malaysia, 28–30 November 2017; pp. 175–180. [Google Scholar] [CrossRef]
- Carabassa, V.; Montero, P.; Alcañiz, J.M.; Padró, J.C. Soil Erosion Monitoring in Quarry Restoration Using Drones. Minerals 2021, 11, 949. [Google Scholar] [CrossRef]
- Said, K.O.; Onifade, M.; Githiria, J.M.; Abdulsalam, J.; Bodunrin, M.O.; Genc, B.; Johnson, O.; Akande, J.M. On the application of drones: A progress report in mining operations. Int. J. Min. Reclam. Environ. 2021, 35, 235–267. [Google Scholar] [CrossRef]
- Pucino, N.; Kennedy, D.M.; Carvalho, R.C.; Allan, B.; Ierodiaconou, D. Citizen science for monitoring seasonal-scale beach erosion and behaviour with aerial drones. Sci. Rep. 2021, 11, 3935. [Google Scholar] [CrossRef]
- Monteiro, J.G.; Jiménez, J.L.; Gizzi, F.; Přikryl, P.; Lefcheck, J.S.; Santos, R.S.; Canning-Clode, J. Novel approach to enhance coastal habitat and biotope mapping with drone aerial imagery analysis. Sci. Rep. 2021, 11, 574. [Google Scholar] [CrossRef]
- Green, D.R.; Hagon, J.J.; Gómez, C.; Gregory, B.J. Chapter 21 - Using Low-Cost UAVs for Environmental Monitoring, Mapping, and Modelling: Examples From the Coastal Zone. In Coastal Management; Krishnamurthy, R., Jonathan, M., Srinivasalu, S., Glaeser, B., Eds.; Academic Press: Cambridge, MA, USA, 2019; pp. 465–501. [Google Scholar] [CrossRef]
- Chakrabarty, A.; Ippolito, C.A. Wildfire monitoring using Unmanned Aerial Vehicles operating under UTM (STEReO). In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15, 19–21 January 2021; p. 1472. [Google Scholar]
- Corcoran, E.; Winsen, M.; Sudholz, A.; Hamilton, G. Automated detection of wildlife using drones: Synthesis, opportunities and constraints. Methods Ecol. Evol. 2021, 12, 1103–1114. [Google Scholar] [CrossRef]
- Munawar, H.S.; Ullah, F.; Khan, S.I.; Qadir, Z.; Qayyum, S. UAV Assisted Spatiotemporal Analysis and Management of Bushfires: A Case Study of the 2020 Victorian Bushfires. Fire 2021, 4, 40. [Google Scholar] [CrossRef]
- Sadat-Noori, M.; Rankin, C.; Rayner, D.; Heimhuber, V.; Gaston, T.; Drummond, C.; Chalmers, A.; Khojasteh, D.; Glamore, W. Coastal wetlands can be saved from sea level rise by recreating past tidal regimes. Sci. Rep. 2021, 11, 1196. [Google Scholar] [CrossRef]
- Pecina, M.V.; Bergamo, T.F.; Ward, R.; Joyce, C.; Sepp, K. A novel UAV-based approach for biomass prediction and grassland structure assessment in coastal meadows. Ecol. Indic. 2021, 122, 107227. [Google Scholar] [CrossRef]
- Lekkas, E.; Andreadakis, E.; Diakakis, M.; Mavroulis, S.; Antoniou, V. Natural Disasters: Mapping and Evaluating Incidents. In Emergency Medicine, Trauma and Disaster Management; Springer: Berlin/Heidelberg, Germany, 2021; pp. 451–462. [Google Scholar]
- Hernández, D.; Cano, J.C.; Silla, F.; Calafate, C.T.; Cecilia, J.M. AI-enabled autonomous drones for fast climate change crisis assessment. IEEE Internet Things J. 2021, 9, 7286–7297. [Google Scholar] [CrossRef]
- Hassanalian, M.; Rice, D.; Abdelkefi, A. Evolution of space drones for planetary exploration: A review. Prog. Aerosp. Sci. 2018, 97, 61–105. [Google Scholar] [CrossRef]
- Schofield, G.; Esteban, N.; Katselidis, K.A.; Hays, G.C. Drones for research on sea turtles and other marine vertebrates–A review. Biol. Conserv. 2019, 238, 108214. [Google Scholar] [CrossRef]
- Sherman, M.; Gammill, M.; Raissi, A.; Hassanalian, M. Solar UAV for the Inspection and Monitoring of Photovoltaic (PV) Systems in Solar Power Plants. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–15, 19–21 January 2021; p. 1683. [Google Scholar]
- Matani, A.G. Internet of Things and Internet of Drones in the Renewable Energy Infrastructure Towards Energy Optimization. In AI and IOT in Renewable Energy; Springer: Berlin/Heidelberg, Germany, 2021; pp. 15–26. [Google Scholar]
- Jeelani, I.; Gheisari, M. Safety challenges of UAV integration in construction: Conceptual analysis and future research roadmap. Saf. Sci. 2021, 144, 105473. [Google Scholar] [CrossRef]
- Banaszek, A.; Banaszek, S.; Cellmer, A. Possibilities of use of uavs for technical inspection of buildings and constructions. IOP Conf. Ser. 2017, 95, 032001. [Google Scholar] [CrossRef]
- Anwar, N.; Izhar, M.A.; Najam, F.A. Construction monitoring and reporting using drones and unmanned aerial vehicles (UAVs). In Proceedings of the The Tenth International Conference on Construction in the 21st Century (CITC-10), Colombo, Sri Lanka, 2–4 July 2018; pp. 2–4. [Google Scholar]
- Namian, M.; Khalid, M.; Wang, G.; Turkan, Y. Revealing safety risks of unmanned aerial vehicles in construction. Transp. Res. Rec. 2021, 2675, 03611981211017134. [Google Scholar] [CrossRef]
- Trubia, S.; Curto, S.; Severino, A.; Arena, F.; Puleo, L. The use of UAVs for civil engineering infrastructures. AIP Conf. Proc. 2021, 2343, 110012. [Google Scholar]
- Khan, M.A.; Safi, A.; Qureshi, I.M.; Khan, I.U. Flying ad-hoc networks (FANETs): A review of communication architectures, and routing protocols. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017; pp. 1–9. [Google Scholar] [CrossRef]
- Srivastava, A.; Prakash, J. Future FANET with application and enabling techniques: Anatomization and sustainability issues. Comput. Sci. Rev. 2021, 39, 100359. [Google Scholar] [CrossRef]
- Xie, T.; Zhao, H.; Xiong, J.; Sarkar, N.I. A Multi-Channel MAC Protocol With Retrodirective Array Antennas in Flying Ad Hoc Networks. IEEE Trans. Veh. Technol. 2021, 70, 1606–1617. [Google Scholar] [CrossRef]
- Ibrahim, M.M.S.; Shanmugaraja, P. Optimized link state routing protocol performance in flying ad-hoc networks for various data rates of Un manned aerial network. Mater. Today Proc. 2021, 37, 3561–3568. [Google Scholar] [CrossRef]
- Khan, M.F.; Yau, K.L.A.; Noor, R.M.; Imran, M.A. Routing Schemes in FANETs: A Survey. Sensors 2020, 20, 38. [Google Scholar] [CrossRef]
- Pang, X.; Liu, M.; Li, Z.; Gao, B.; Guo, X. Geographic Position based Hopless Opportunistic Routing for UAV networks. Ad Hoc Netw. 2021, 120, 102560. [Google Scholar] [CrossRef]
- Marconato, E.A.; Maxa, J.A.; Pigatto, D.F.; Pinto, A.S.R.; Larrieu, N.; Branco, K.R.L.J.C. IEEE 802.11n vs. IEEE 802.15.4: A Study on Communication QoS to Provide Safe FANETs. In Proceedings of the 2016 46th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshop (DSN-W), Toulouse, France, 28 June–1 July 2016; pp. 184–191. [Google Scholar] [CrossRef]
- Friis, H. A Note on a Simple Transmission Formula. Proc. IRE 1946, 34, 254–256. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M.D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [PubMed]
- Rezwan, S.; Choi, W. A Survey on Applications of Reinforcement Learning in Flying Ad-Hoc Networks. Electronics 2021, 10, 449. [Google Scholar] [CrossRef]
- Sun, J.; Li, B.; Jiang, Y.; Wen, C.y. A Camera-Based Target Detection and Positioning UAV System for Search and Rescue (SAR) Purposes. Sensors 2016, 16, 1778. [Google Scholar] [CrossRef] [PubMed]
- Masroor, R.; Naeem, M.; Ejaz, W. Efficient deployment of UAVs for disaster management: A multi-criterion optimization approach. Comput. Commun. 2021, 177, 185–194. [Google Scholar] [CrossRef]
- Qadir, Z.; Ullah, F.; Munawar, H.S.; Al-Turjman, F. Addressing disasters in smart cities through UAVs path planning and 5G communications: A systematic review. Comput. Commun. 2021, 168, 114–135. [Google Scholar] [CrossRef]
- Arpaio, M.J.; Fuschini, F.; Masotti, D. A Dual Frequency Blade Antenna Enabling UAV-Based Operations in ADS-B and 5G Environments. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1618–1623. [Google Scholar] [CrossRef]
- Bujari, A.; Calafate, C.T.; Cano, J.C.; Manzoni, P.; Palazzi, C.E.; Ronzani, D. Flying ad-hoc network application scenarios and mobility models. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717738192. [Google Scholar] [CrossRef]
- Yoon, J.; Lee, A.H.; Lee, H. Rendezvous: Opportunistic Data Delivery to Mobile Users by UAVs Through Target Trajectory Prediction. IEEE Trans. Veh. Technol. 2020, 69, 2230–2245. [Google Scholar] [CrossRef]
- Lu, H.; Wei, X.; Qian, H.; Chen, M. A cost-efficient elastic UAV relay network construction method with guaranteed QoS. Ad Hoc Netw. 2020, 107, 102219. [Google Scholar] [CrossRef]
- Zhang, K.; Li, K.; He, J.; Shi, H.; Wang, Y.; Niu, C. A UAV Autonomous Maneuver Decision-Making Algorithm for Route Guidance. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 17–25. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Chaib, N.; Lakas, A.; Lorenz, P.; Rachedi, A. UAV-Assisted Supporting Services Connectivity in Urban VANETs. IEEE Trans. Veh. Technol. 2019, 68, 3944–3951. [Google Scholar] [CrossRef]
- Li, J.; Jannotti, J.; De Couto, D.S.J.; Karger, D.R.; Morris, R. A Scalable Location Service for Geographic Ad Hoc Routing. In Proceedings of the MobiCom ’00, 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; Association for Computing Machinery: New York, NY, USA, 2000; pp. 120–130. [Google Scholar] [CrossRef]
- Singh, K.; Verma, A.K. Experimental analysis of AODV, DSDV and OLSR routing protocol for flying adhoc networks (FANETs). In Proceedings of the 2015 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 5–7 March 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Singh, K.; Kumar, A.V.A. Applying OLSR routing in FANETs. In Proceedings of the 2014 IEEE International Conference on Advanced Communications, Control and Computing Technologies, Ramanathapuram, India, 8–10 May 2014; pp. 1212–1215. [Google Scholar] [CrossRef]
- Vasiliev, D.S.; Meitis, D.S.; Abilov, A. Simulation-Based Comparison of AODV, OLSR and HWMP Protocols for Flying Ad Hoc Networks. In Internet of Things, Smart Spaces, and Next Generation Networks and Systems, Proceedings of the 18th International Conference, NEW2AN 2018, and 11th Conference, ruSMART 2018, St. Petersburg, Russia, 27–29 August 2018; Balandin, S., Andreev, S., Koucheryavy, Y., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 245–252. [Google Scholar]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for Flying Ad hoc Networks (FANETs). Veh. Commun. 2017, 10, 29–56. [Google Scholar] [CrossRef]
- Khan, M.A.; Khan, I.U.; Safi, A.; Quershi, I.M. Dynamic Routing in Flying Ad-Hoc Networks Using Topology-Based Routing Protocols. Drones 2018, 2, 27. [Google Scholar] [CrossRef]
- Cheng, C.M.; Hsiao, P.H.; Kung, H.T.; Vlah, D. Maximizing Throughput of UAV-Relaying Networks with the Load-Carry-and-Deliver Paradigm. In Proceedings of the 2007 IEEE Wireless Communications and Networking Conference, Hong Kong, China, 11–15 March 2007; pp. 4417–4424. [Google Scholar] [CrossRef]
- Clausen, T.H.; Jacquet, P. Optimized Link State Routing Protocol (OLSR). RFC 2003, 3626. [Google Scholar] [CrossRef]
- Royer, E.M.; Perkins, C.E. Multicast Ad hoc On-Demand Distance Vector (MAODV) Routing. In Internet-Draft Draft-IETF-Manet-Maodv-00; Work in Progress; Internet Engineering Task Force: Wilmington, DE, USA, 2000. [Google Scholar]
- Oubbati, O.S.; Atiquzzaman, M.; Lorenz, P.; Tareque, M.H.; Hossain, M.S. Routing in flying ad hoc networks: Survey, constraints, and future challenge perspectives. IEEE Access 2019, 7, 81057–81105. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. CRUV: Connectivity-based traffic density aware routing using UAVs for VANets. In Proceedings of the 2015 International Conference on Connected Vehicles and Expo (ICCVE), Shenzhen, China, 19–23 October 2015; pp. 68–73. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. A survey on cluster-based routing protocols for unmanned aerial vehicle networks. IEEE Access 2018, 7, 498–516. [Google Scholar] [CrossRef]
- Leonov, A.V. Application of bee colony algorithm for FANET routing. In Proceedings of the 2016 17th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices (EDM), Erlagol, Russia, 30 June–4 July 2016; pp. 124–132. [Google Scholar] [CrossRef]
- e Silva, T.D.; de Melo, C.F.E.; Cumino, P.; Rosário, D.; Cerqueira, E.; de Freitas, E.P. STFANET: SDN-Based Topology Management for Flying Ad Hoc Network. IEEE Access 2019, 7, 173499–173514. [Google Scholar] [CrossRef]
- Fabra, F.; Zamora, W.; Reyes, P.; Sanguesa, J.A.; Calafate, C.T.; Cano, J.C.; Manzoni, P. MUSCOP: Mission-Based UAV Swarm Coordination Protocol. IEEE Access 2020, 8, 72498–72511. [Google Scholar] [CrossRef]
- Pasandideh, F.; Silva, T.D.e.; Silva, A.A.S.d.; de Freitas, E.P. Topology management for flying ad hoc networks based on particle swarm optimization and software-defined networking. Wirel. Netw. 2021, 28, 257–272. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2022, 6, 9. [Google Scholar] [CrossRef]
- Chen, M.; Saad, W.; Yin, C. Deep Learning for 360° Content Transmission in UAV-Enabled Virtual Reality. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, M.; Saad, W.; Yin, C. Echo State Learning for Wireless Virtual Reality Resource Allocation in UAV-Enabled LTE-U Networks. In Proceedings of the 2018 IEEE International Conference on Communications (ICC), Kansas City, MO, USA, 20–24 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.; Jayakody, D.N.K.; Wang, H.C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Bushnaq, O.M.; Chaaban, A.; Al-Naffouri, T.Y. The Role of UAV-IoT Networks in Future Wildfire Detection. IEEE Internet Things J. 2021, 8, 16984–16999. [Google Scholar] [CrossRef]
- Abdelmaboud, A. The Internet of Drones: Requirements, Taxonomy, Recent Advances, and Challenges of Research Trends. Sensors 2021, 21, 5718. [Google Scholar] [CrossRef]
- Pirayesh, H.; Sangdeh, P.K.; Zeng, H. EE-IoT: An Energy-Efficient IoT Communication Scheme for WLANs. In Proceedings of the IEEE INFOCOM 2019–IEEE Conference on Computer Communications, Paris, France, 29 April–2 May 2019; pp. 361–369. [Google Scholar] [CrossRef]
- Haus, M.; Krol, J.; Ding, A.Y.; Ott, J. Feasibility Study of Autonomous Drone-Based IoT Device Management in Indoor Environments. In Proceedings of the MAGESys’19, ACM SIGCOMM 2019 Workshop on Mobile AirGround Edge Computing, Systems, Networks, and Applications, Beijing, China, 19 August 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Li, P.; Xu, J. UAV-Enabled Cellular Networks with Multi-Hop Backhauls: Placement optimization and Wireless Resource Allocation. In Proceedings of the 2018 IEEE International Conference on Communication Systems (ICCS), Chengdu, China, 19–21 December 2018; pp. 110–114. [Google Scholar] [CrossRef]
- Al-Janabi, S.; Al-Shourbaji, I.; Shojafar, M.; Abdelhag, M. Mobile Cloud Computing: Challenges and Future Research Directions. In Proceedings of the 2017 10th International Conference on Developments in eSystems Engineering (DeSE), Paris, France, 14–19 June 2017; pp. 62–67. [Google Scholar] [CrossRef]
- de Freitas, E.P.; Bermejo-Alonso, J.; Khamis, A.; Li, H.; Olszewska, J.I. Ontologies for cloud robotics. Knowl. Eng. Rev. 2020, 35, e25. [Google Scholar] [CrossRef]
- de Freitas, E.P.; Olszewska, J.I.; Carbonera, J.L.; Fiorini, S.R.; Khamis, A.; Ragavan, S.V.; Barreto, M.E.; Prestes, E.; Habib, M.K.; Redfield, S.; et al. Ontological concepts for information sharing in cloud robotics. J. Ambient. Intell. Humaniz. Comput. 2020. [Google Scholar] [CrossRef]
- Bekkouche, O.; Taleb, T.; Bagaa, M. UAVs Traffic Control Based on Multi-Access Edge Computing. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Hua, M.; Huang, Y.; Wang, Y.; Wu, Q.; Dai, H.; Yang, L. Energy Optimization for Cellular-Connected Multi-UAV Mobile Edge Computing Systems with Multi-Access Schemes. J. Commun. Inf. Netw. 2018, 3, 33–44. [Google Scholar] [CrossRef]
- Yue, L.; Wanguo, W.; Ronghao, X.; Zengwei, L.; Yuan, T. An Intelligent Identification and Acquisition System for UAVs Based on Edge Computing Using in the Transmission Line Inspection. In Proceedings of the ICRCA 2019, 2019 4th International Conference on Robotics, Control and Automation, Guangzhou, China, 26–28 July 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 205–209. [Google Scholar] [CrossRef]
- Khan, W.; Nahon, M. Modeling dynamics of agile fixed-wing UAVs for real-time applications. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1303–1312. [Google Scholar] [CrossRef]
- Shrestha, R.; Bajracharya, R.; Kim, S. 6G Enabled Unmanned Aerial Vehicle Traffic Management: A Perspective. IEEE Access 2021, 9, 91119–91136. [Google Scholar] [CrossRef]
- Fotouhi, A.; Ding, M.; Hassan, M. DroneCells: Improving spectral efficiency using drone-mounted flying base stations. J. Netw. Comput. Appl. 2021, 174, 102895. [Google Scholar] [CrossRef]
- Luo, F.; Jiang, C.; Yu, S.; Wang, J.; Li, Y.; Ren, Y. Stability of Cloud-Based UAV Systems Supporting Big Data Acquisition and Processing. IEEE Trans. Cloud Comput. 2019, 7, 866–877. [Google Scholar] [CrossRef]
- Chowdhury, M.M.U.; Anjinappa, C.K.; Guvenc, I.; Sichitiu, M.; Ozdemir, O.; Bhattacherjee, U.; Dutta, R.; Marojevic, V.; Floyd, B. A Taxonomy and Survey on Experimentation Scenarios for Aerial Advanced Wireless Testbed Platforms. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; pp. 1–20. [Google Scholar] [CrossRef]
- Gill, J.S.; Velashani, M.S.; Wolf, J.; Kenney, J.; Manesh, M.R.; Kaabouch, N. Simulation Testbeds and Frameworks for UAV Performance Evaluation. In Proceedings of the 2021 IEEE International Conference on Electro Information Technology (EIT), Mt. Pleasant, MI, USA, 14–15 May 2021; pp. 335–341. [Google Scholar] [CrossRef]
- Kang, S.; Aldwairi, M.; Kim, K.I. A survey on network simulators in three-dimensional wireless ad hoc and sensor networks. Int. J. Distrib. Sens. Netw. 2016, 12, 1550147716664740. [Google Scholar] [CrossRef]
- Hentati, A.I.; Krichen, L.; Fourati, M.; Fourati, L.C. Simulation Tools, Environments and Frameworks for UAV Systems Performance Analysis. In Proceedings of the 2018 14th International Wireless Communications Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; pp. 1495–1500. [Google Scholar] [CrossRef]
- Zema, N.R.; Trotta, A.; Sanahuja, G.; Natalizio, E.; Di Felice, M.; Bononi, L. CUSCUS: CommUnicationS-control distributed simulator. In Proceedings of the 2017 14th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 601–602. [Google Scholar]
- Kate, B.; Waterman, J.; Dantu, K.; Welsh, M. Simbeeotic: A simulator and testbed for micro-aerial vehicle swarm experiments. In Proceedings of the 2012 ACM/IEEE 11th International Conference on Information Processing in Sensor Networks (IPSN), Beijing, China, 16–20 April 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 49–60. [Google Scholar]
- Javaid, A.Y.; Sun, W.; Alam, M. UAVSim: A simulation testbed for unmanned aerial vehicle network cyber security analysis. In Proceedings of the 2013 IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1432–1436. [Google Scholar]
- Al-Mousa, A.; Sababha, B.H.; Al-Madi, N.; Barghouthi, A.; Younisse, R. UTSim: A framework and simulator for UAV air traffic integration, control, and communication. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419870937. [Google Scholar] [CrossRef]
- Tropea, M.; Fazio, P.; De Rango, F.; Cordeschi, N. A new fanet simulator for managing drone networks and providing dynamic connectivity. Electronics 2020, 9, 543. [Google Scholar] [CrossRef] [Green Version]
- Veith, T.L.; Kobza, J.E.; Koelling, C.P. Netsim: Java™-based simulation for the world wide web. Comput. Oper. Res. 1999, 26, 607–621. [Google Scholar] [CrossRef]
- Varga, A. OMNeT++. In Modeling and Tools for Network Simulation; Springer: Berlin/Heidelberg, Germany, 2010; pp. 35–59. [Google Scholar]
- Issariyakul, T.; Hossain, E. Introduction to network simulator 2 (NS2). In Introduction to Network Simulator NS2; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1–18. [Google Scholar]
- Durham, C.M.; Andel, T.R.; Hopkinson, K.M.; Kurkowski, S.H. Evaluation of an OPNET model for unmanned aerial vehicle (UAV) networks. In Proceedings of the 2009 Spring Simulation Multiconference, San Diego, CA, USA, 22–27 March 2009; pp. 1–8. [Google Scholar]
- Calvo-Fullana, M.; Mox, D.; Pyattaev, A.; Fink, J.; Kumar, V.; Ribeiro, A. Ros-netsim: A framework for the integration of robotic and network simulators. IEEE Robot. Autom. Lett. 2021, 6, 1120–1127. [Google Scholar] [CrossRef]
- Ribeiro, L.R.; Oliveira, N.M.F. UAV autopilot controllers test platform using Matlab/Simulink and X-Plane. In Proceedings of the 2010 IEEE Frontiers in Education Conference (FIE), Arlington, VA, USA, 27–30 October 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Levis, P.; Lee, N. Tossim: A simulator for tinyos networks. UC Berkeley Sept. 2003, 24. Available online: http://cs.uccs.edu/~cs526/mote/doc/nido.pdf (accessed on 21 July 2022).
- Zheng, Y.; Wang, Y.; Li, Z.; Dong, L.; Jiang, Y.; Zhang, H. A mobility and load aware OLSR routing protocol for UAV mobile ad-hoc networks. In Proceedings of the 2014 International Conference on Information and Communications Technologies (ICT 2014), Nanjing, China, 15–17 May 2014. [Google Scholar]
- Gu, D.L.; Pei, G.; Ly, H.; Gerla, M.; Hong, X. Hierarchical routing for multi-layer ad-hoc wireless networks with UAVs. In Proceedings of the MILCOM 2000 Proceedings. 21st Century Military Communications. Architectures and Technologies for Information Superiority (Cat. No. 00CH37155), Los Angeles, CA, USA, 22–25 October 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 1, pp. 310–314. [Google Scholar]
- Lacage, M.; Henderson, T.R. Yet another network simulator. In Proceedings of the 2006 Workshop on ns-2: The IP Network Simulator, Pisa, Italy, 10 October 2006; p. 12-es. [Google Scholar]
- Li, X.; Ci, L.; Cheng, B.; Tian, C.; Yang, M. Ant colony based routing strategy in UAV delay tolerant networks. In Advances in Wireless Sensor Networks, Proceedings of the China Conference on Wireless Sensor Networks, Huangshan, China, 25–27 October 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 191–203. [Google Scholar]
- Baidya, S.; Shaikh, Z.; Levorato, M. FlyNetSim: An open source synchronized UAV network simulator based on ns-3 and ardupilot. In Proceedings of the 21st ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Montreal, QC, Canada, 28 October–2 November 2018; pp. 37–45. [Google Scholar]
- BonnMotion. A Mobility Scenario Generation and Analysis Tool; University of Bonn: Bonn, Germany, 2011; pp. 4–14. [Google Scholar]
- Bernardeschi, C.; Fagiolini, A.; Palmieri, M.; Scrima, G.; Sofia, F. Ros/gazebo based simulation of co-operative uavs. In Modelling and Simulation for Autonomous Systems, Proceedings of the 5th International Conference, MESAS 2018, Prague, Czech Republic, 17–19 October 2018; Springer: Cham, Switzerland, 2018; pp. 321–334. [Google Scholar]
- Madaan, R.; Gyde, N.; Vemprala, S.; Brown, M.; Nagami, K.; Taubner, T.; Cristofalo, E.; Scaramuzza, D.; Schwager, M.; Kapoor, A. Airsim drone racing lab. In Proceedings of the NeurIPS 2019 Competition and Demonstration Track. PMLR, Vancouver, BC, Canada, 8–14 December 2019; pp. 177–191. [Google Scholar]
- Kudelski, M.; Gambardella, L.M.; Di Caro, G.A. RoboNetSim: An integrated framework for multi-robot and network simulation. Robot. Auton. Syst. 2013, 61, 483–496. [Google Scholar] [CrossRef]
- Sugiura, K. SuMo-SS: Submodular Optimization Sensor Scattering for Deploying Sensor Networks by Drones. IEEE Robot. Autom. Lett. 2018, 3, 2963–2970. [Google Scholar] [CrossRef]
- Mahmoud, S.; Mohamed, N. Collaborative UAVs Cloud. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 365–373. [Google Scholar] [CrossRef]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT Framework Views and Challenges: Towards Protecting Drones as “Things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef]
- Jim, L.E.; Islam, N.; Gregory, M.A. Enhanced MANET security using artificial immune system based danger theory to detect selfish nodes. Comput. Secur. 2022, 113, 102538. [Google Scholar] [CrossRef]
- Hu, J.; Chen, C.; Cai, L.; Khosravi, M.R.; Pei, Q.; Wan, S. UAV-Assisted Vehicular Edge Computing for the 6G Internet of Vehicles: Architecture, Intelligence, and Challenges. IEEE Commun. Stand. Mag. 2021, 5, 12–18. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Noura, H.; Mahmoud, S. UAVFog: A UAV-based fog computing for Internet of Things. In Proceedings of the 2017 IEEE SmartWorld, Ubiquitous Intelligence & Computing, Advanced & Trusted Computed, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), San Francisco, CA, USA, 4–8 August 2017; pp. 1–8. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Size (inch) | Weight (gram) | Max Altitude | Coverage Range (kilometer) | Endurance (hour) |
|---|---|---|---|---|---|
| Nano | around 3 | W ≤ 0.2 | h ≤ 15 | 0.05 < r < 0.1 | E < 0.6 |
| Micro | s ≤ 4 | 0.2 < W ≤ 2 | h ≤ 15 | 0.1 < r < 0.5 | E < 1 |
| Mini | 4 ≤ s ≤ 12 | 2 < W ≤ 20 | h ≤ 30 | 0.5 < r < 1 | E < 1 |
| Very Small | 12 ≤ s ≤ 20 | around 20 | h ≤ 300 | 1 < r < 5 | 1 < E < 3 |
| Small | 20 ≤ s ≤ 80 | 20 ≤ W ≤ 150 | 300 ≤ h ≤ 1500 | 10 < r < 100 | 0.5 < E < 2 |
| Medium | 200 ≤ s ≤ 400 | 50 ≤ W ≤ 200 | 3000 ≤ h ≤ 4500 | 500 < r < 2000 | 3 < E < 10 |
| Large | 900 ≤ s ≤ 2500 | 4500 ≤ W ≤ 13,000 | 6000 ≤ h ≤ 12,000 | 1000 < r < 5000 | 10 < E < 200 |
| Tactical | 4000 ≤ s ≤ 11,000 | 150 ≤ W ≤ 600 | 3000 ≤ h ≤ 1000 | 500 < r < 2000 | 5 < E < 12 |
| MALE | 600 ≤ s ≤ 1500 | W > 2000 | 4500 ≤ h ≤ 9000 | 20,000 < r < 40,000 | 10 < E < 200 |
| HALE | 800 ≤ s ≤ 2000 | 450 ≤ W ≤ 4500 | 15,000 ≤ h ≤ 21,000 | 2000 < r < 4000 | 30 < E < 50 |
| Name | Type | Mobility Model | Operating System | Programming Language | More Description |
|---|---|---|---|---|---|
| AVENS (http://hdl.handle.net/10125/41924 accessed on 21 July 2022) | Simulator | Linear Mobility | Linux, Windows, MacOS | N/A | A flight control simulator that implements co-simulation between the XPlane Flight Simulator and an OMNeT++/INET simulation for modeling UAV communication. |
| CUSCUS [123] | Simulator | micro-mobility | > Ubuntu 14.04 | N/A | A simulation architecture for networked control systems which is based on two well-known solutions in the fields of networking simulation (the NS-3 tool) and UAV control simulation (the FL-AIR tool). |
| Simbeeotic [124] | Simulator and Testbed | N/A | Linux | Java | Used to evaluate Micro-aerial vehicle (MAV) swarms. |
| UAVSim [125] | Testbed | well-defined mobility framework | Windows, Linux and MacOs | C++ | An OMNeT++ based UAV simulator; useful for cyber security analysis in UAV-based networks. |
| UTSim [126] | Simulator and a framework | N/A Linux | Windows | C#, JavaScript, Unity Script, or BOO coding languages. | Useful for air traffic sumulation and capable of simulating UAV physical specification, control, navigation, sensing, communication, and avoidance in environments with stationary and mobile objects. |
| FANETSim [127] | Simulator | Grid | Linux Distribution | Java | Java software able to consider a set of flying UAVs in the sky, providing connectivity to the users inside the considered map. |
| Netsim [128] | Simulator | RW, RWP | Windows, MacOS or | C | Provides three different versions: |
| Debian-based Linux. | NetSim Pro, Standard, and Academic, | ||||
| with a very intuitive GUI interface | |||||
| OMNeT++ [129] | Simulator | FP, RWP, RW | Linux, MacOS. | C++, high-level | A modular and extensible |
| and Windows | language (NED) | component-based network | |||
| simulator used for research and commercial purposes. | |||||
| NS2 [130] | Simulator | RW, RWP, GM, MG, RPGM | Linux, Windows, MacOs | C++, with an OTcl interpreter as a front-end | A discrete event simulator used for networking research which simulates TCP, routing, and multicast protocols over wired and wireless (local and satellite) networks. |
| NS3 [87] | Simulator | RW, RWP, RD, GM, MG, RPGM | Linux, Windows, and MacOS | C++, Python | Allows simulation of both IP and non-IP-based networks. It is suitable for performance evaluation of mobile ad hoc and TCP networks |
| OPNET [131] | Simulator | RW, Group mobility, RWP, RD | Windows, Red Hat and CentOS | C, C++ | Provides a powerful GUI and animation that involves significant costs. |
| ROS-NetSim [132] | Simulator | N/A | Linux | C++, Python | An ROS package that acts as an interface between robotic and network simulators. |
| MATLAB [133] | Simulator | SRCM, PSMM | Windows, Linux, and MacOs | C, C++ | Provides different example applications involving both fixed-wing and multirotor UAVs, along with a UAV Toolbox and the ability to integrate AI/ML through its Statistics and ML Toolbox. |
| TOSSIM [134] | Testbed | RWP | Linux, and it is compatible with Windows | C++, Python | A BSD-licensed OS designed for low-power wireless devices, it is widely used in both academia and industry. |
| QualNet [135] | Simulator | RWP, Group mobility | MacOs, Linux UNIX, Windows, | C++ | A powerful simulation tool for UAV research focusing on network security. |
| GloMoSim [136] | Simulator | RWP, Group mobility | Linux, Windows | C, Parsec | Widely used for research purposes and very scalable; does not offer good documentation, however, which makes it less user-friendly. |
| YANS [137] | Simulator | N.A | MacOS, Ubuntu | Python, C, C++ | A lightning-fast Docker-based network simulator. |
| ONE [138] | Simulator | RWP | Linux, Windows and MacOS | Java | Generates node movement using different movement models and visualizes both mobility and message passing in real-time in its graphical user interface. ONE can import mobility data from real-world traces or other mobility generators. |
| SSFNet (http://www.ssfnet.org/ accessed on 21 July 2022) | Simulator | MG, RPGM, RW, RWP, GM | Linux, Solaris, and Windows NT using JDK1.2 and higher | java, C++ | A scalable simulation framework network model designed for expansion of networks, including topology, protocols, traffic, etc. |
| FlynetSim [139] | Simulator | GM, MG, RPGM, RW, RWP, RD | Ubuntu Distributions | Python | An open-source synchronized UAV network simulator based on NS3 and Ardupilot. |
| J-Sim (https://sites.google.com/site/jsimofficial/downloads accessed on 21 July 2022) | Simulator | RWP | Linux, Windows, and MacOS | Tcl, Python, and Perl | A powerful tool, although it is relatively complicated to use and has a longer execution time than NS3. |
| BonnMotion [140] | Mobility generator | RW, RWP, GM, MG, RPGM and more | Linux, OSX | Java, Windows | Java software that creates and analyzes mobile ad hoc network characteristics. |
| GAZEBO [141] | Simulator | High-speed Mobility | Linux, Linux virtual machines | C++ | A robotics simulation platform for testing algorithms and building AI/ML platforms for UAV applications. It can connect to a robot control framework (ROS). |
| AirSim [142] | Simulator | N/A | Windows, Linux | C++, C#, Python, Java | An open-source platform for AI research experimentation, with computer vision, deep learning, and reinforcement learning algorithms for UAVs |
| RoboNetSim [143] | Framework C++, | It provides good mobility patterns. | MacOs, Linux, Windows, | Python | Integrates multi-robot simulators with network simulators for realistic communications simulation of networked multi-robot systems. It has been applied to interface the NS-2, NS-3, and ARGoS Player/STAGE simulators. |
| Mininet-Wifi (https://mininet-wifi.github.io/ accessed on 21 July 2022) | Emulator | RW, RWP, TruncatedLevyWalk, GM, RandomDirection, Reference Point, TimeVariantCommunity | any Ubuntu Distribution from 14.04 | C++, Python | An extension of the Mininet SDN network emulator that adds or modifies classes and scripts. |
| SUMO [144] | Simulator | N/A | Windows, Linux or MacOs | C++, Python | While it cannot be used directly in FANETs as it is tailored for 2D vehicles, it can be integrated with OMNeT++ and NS3. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pasandideh, F.; da Costa, J.P.J.; Kunst, R.; Islam, N.; Hardjawana, W.; Pignaton de Freitas, E. A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies. Remote Sens. 2022, 14, 4459. https://doi.org/10.3390/rs14184459
Pasandideh F, da Costa JPJ, Kunst R, Islam N, Hardjawana W, Pignaton de Freitas E. A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies. Remote Sensing. 2022; 14(18):4459. https://doi.org/10.3390/rs14184459
Chicago/Turabian StylePasandideh, Faezeh, João Paulo J. da Costa, Rafael Kunst, Nahina Islam, Wibowo Hardjawana, and Edison Pignaton de Freitas. 2022. "A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies" Remote Sensing 14, no. 18: 4459. https://doi.org/10.3390/rs14184459
APA StylePasandideh, F., da Costa, J. P. J., Kunst, R., Islam, N., Hardjawana, W., & Pignaton de Freitas, E. (2022). A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies. Remote Sensing, 14(18), 4459. https://doi.org/10.3390/rs14184459