
Non-Contact In-Plane Movement Estimation of Floating Covers Using Finite Element Formulation on Field-Scale DEM

 , , , ,
, , , , 
Abstract
:1. Introduction
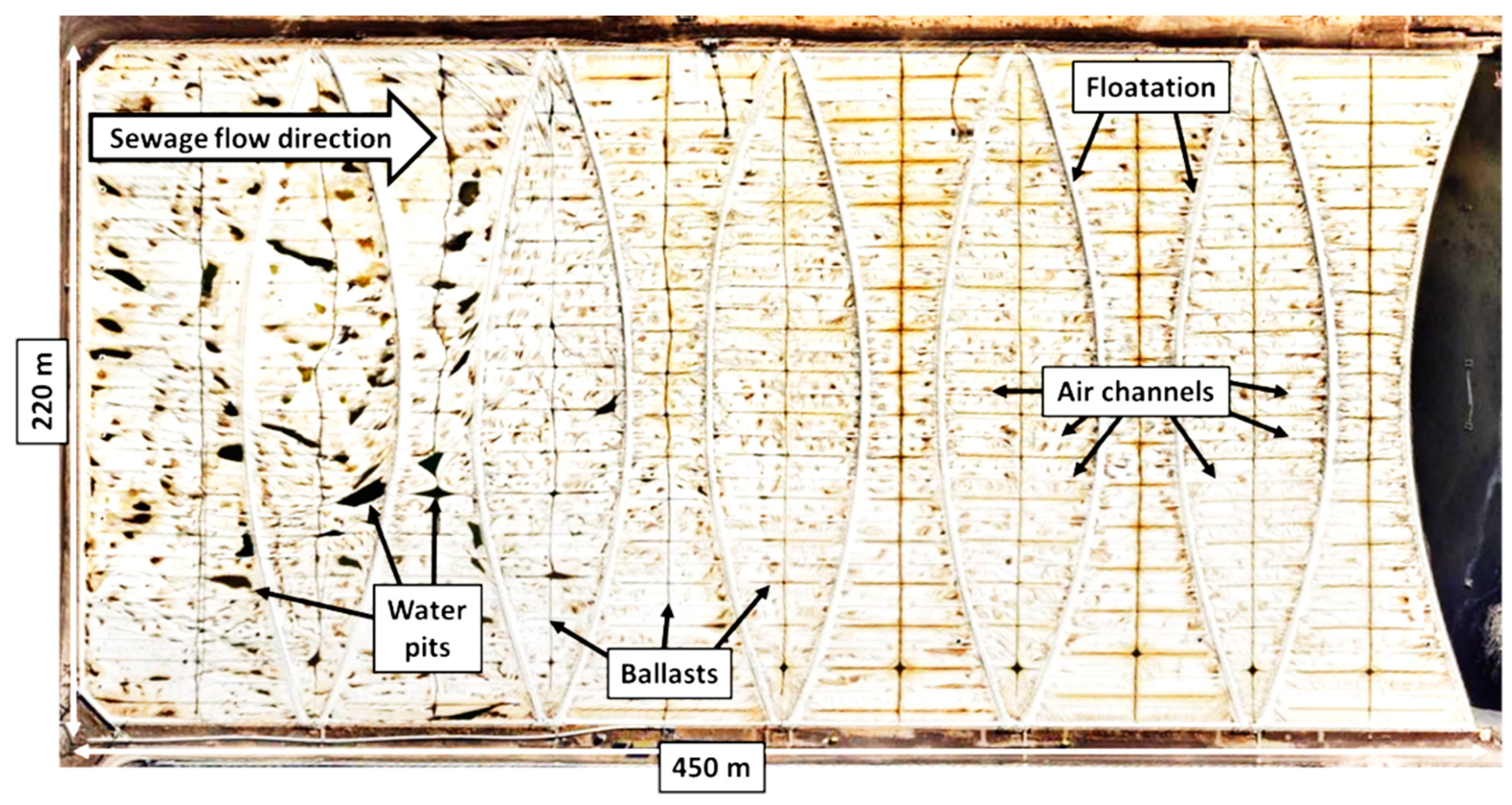
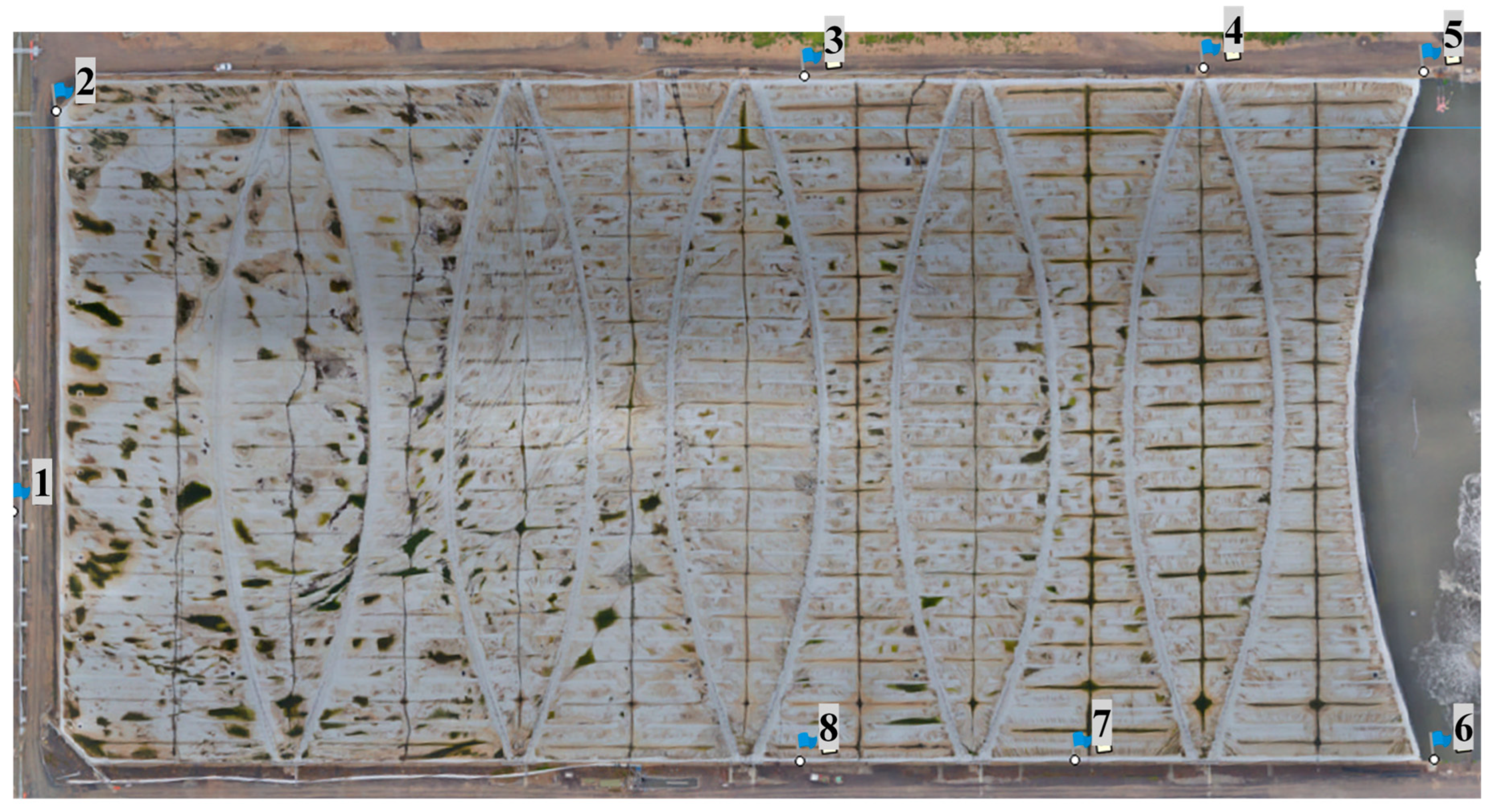
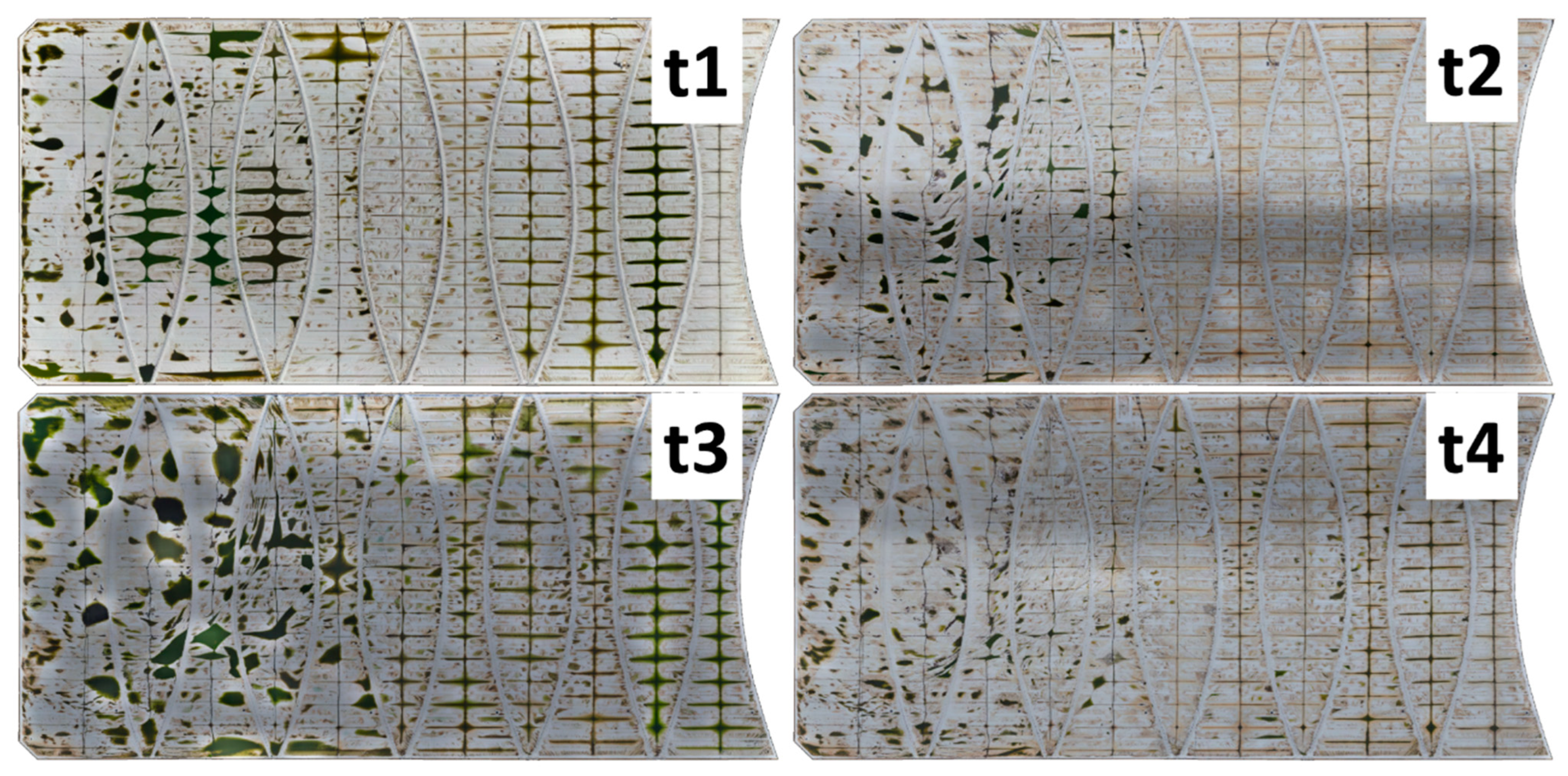
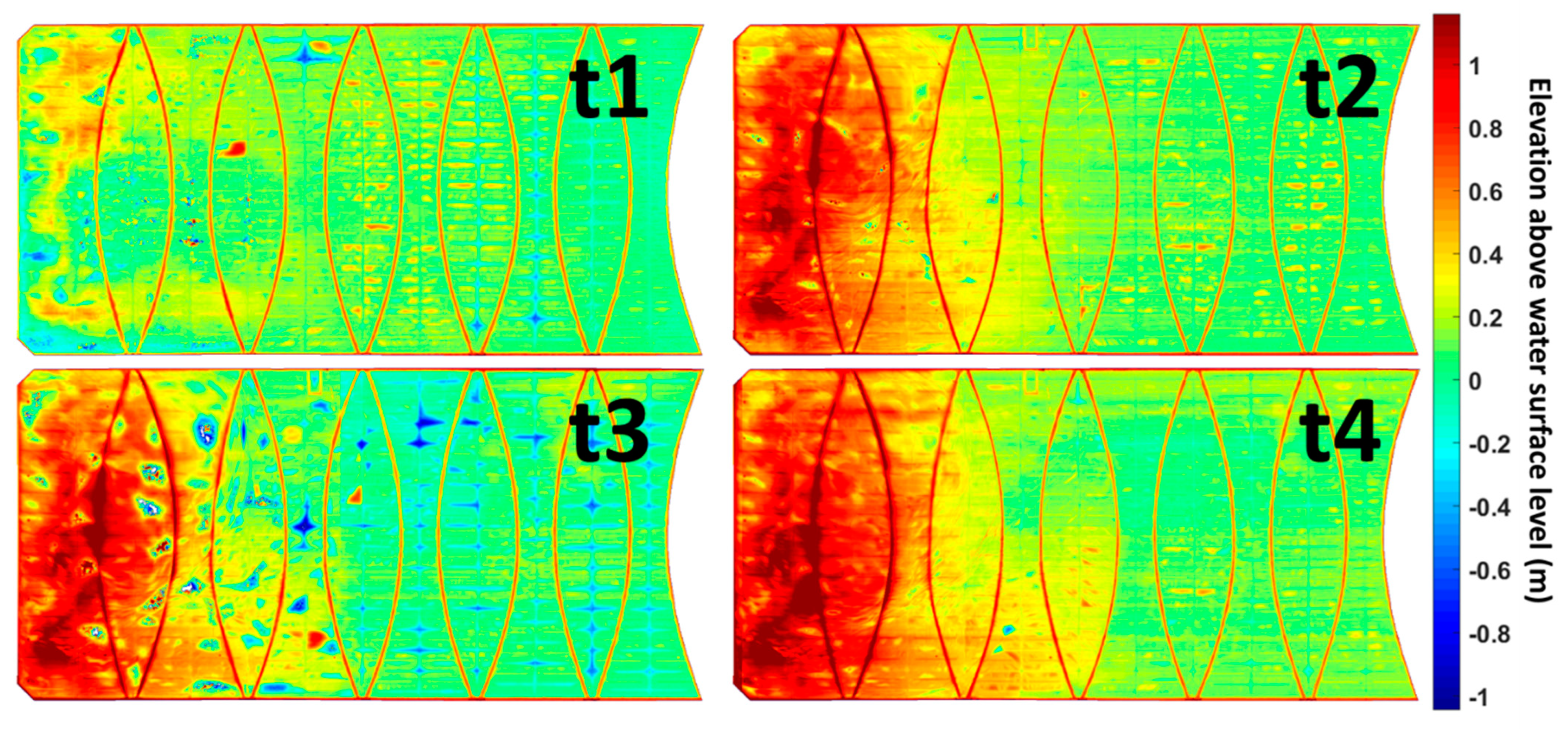
2. UAV Surveillance of the Floating Cover at the WTP
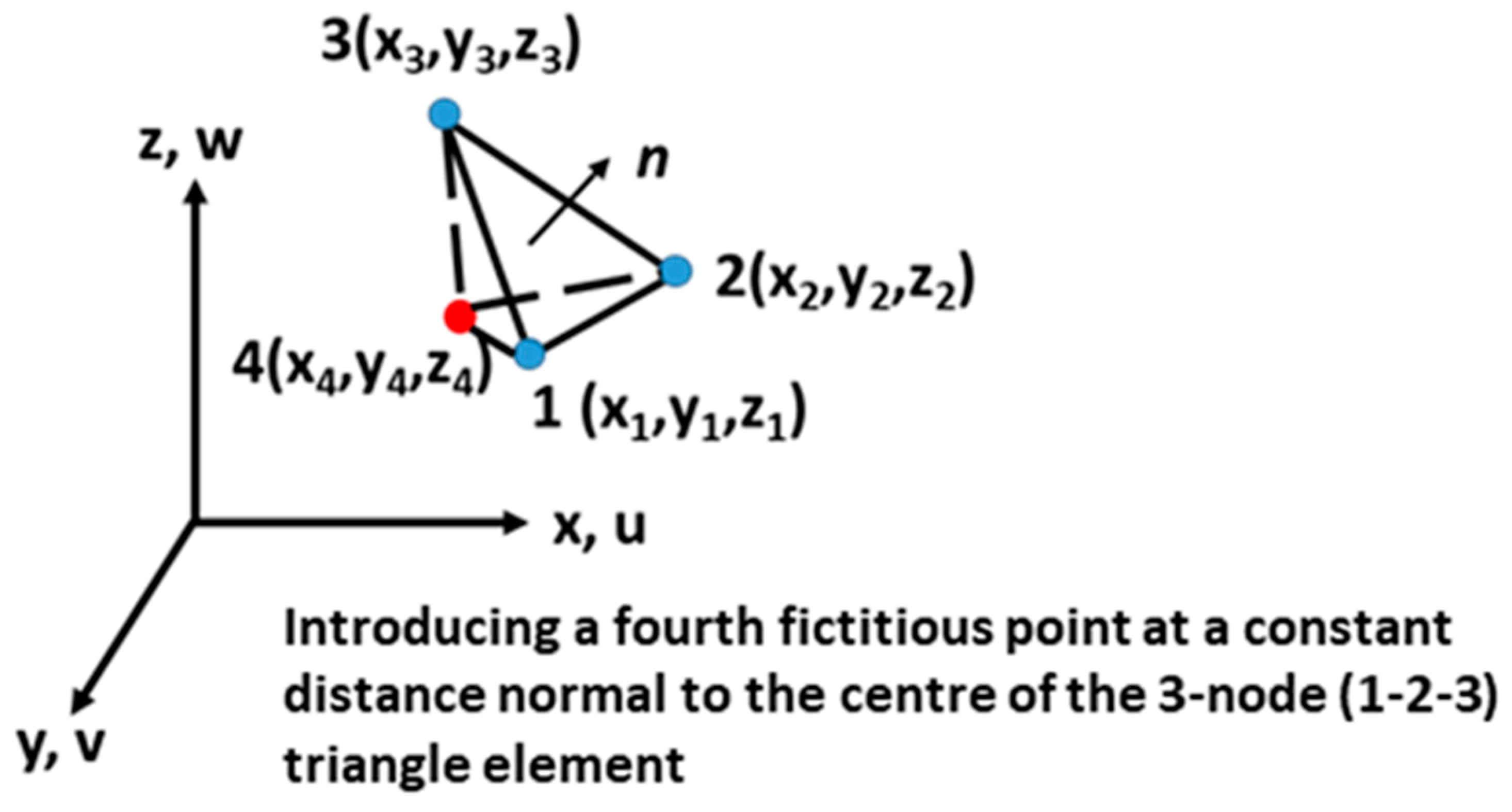
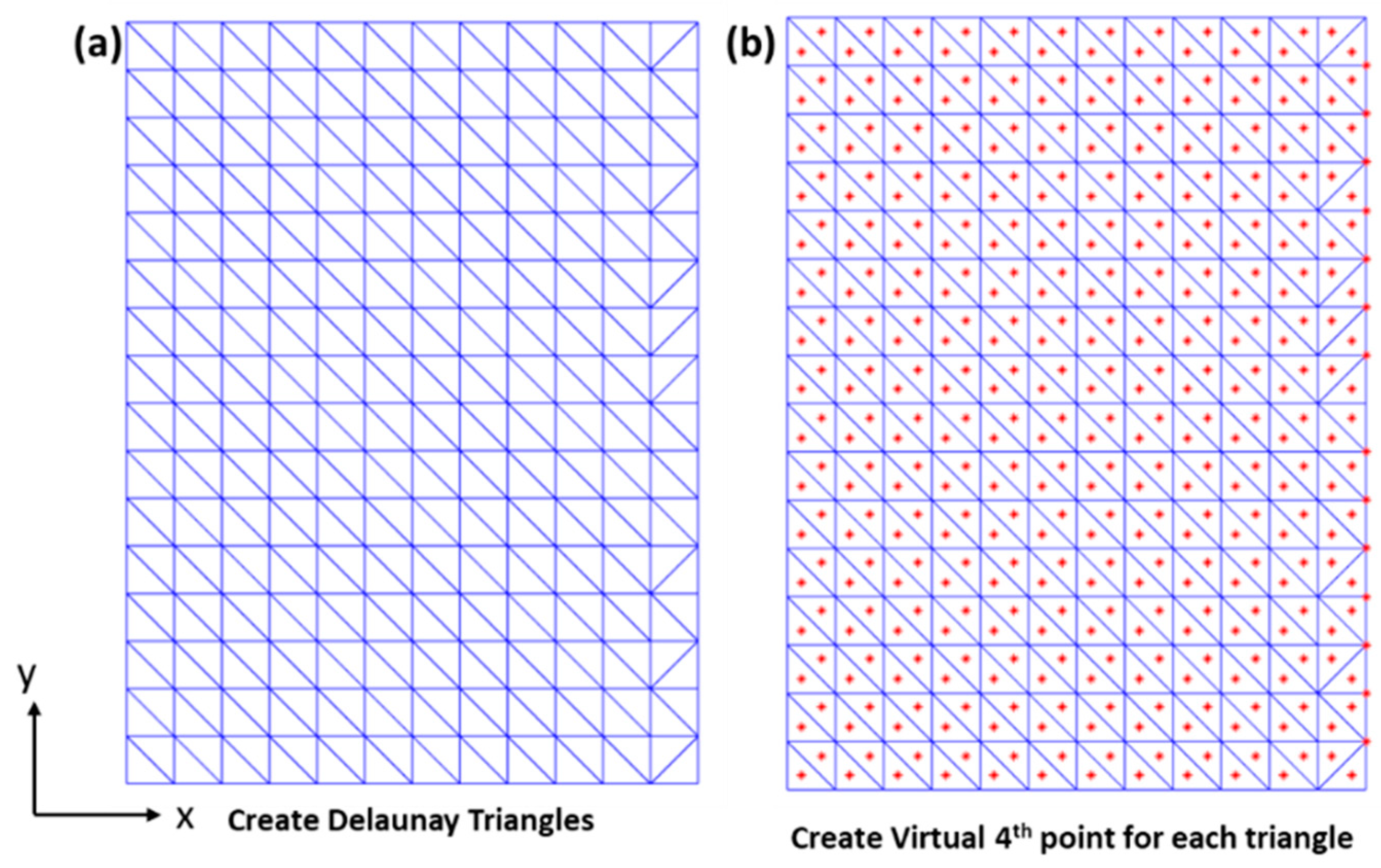
3. In-Plane Movement Estimation Technique
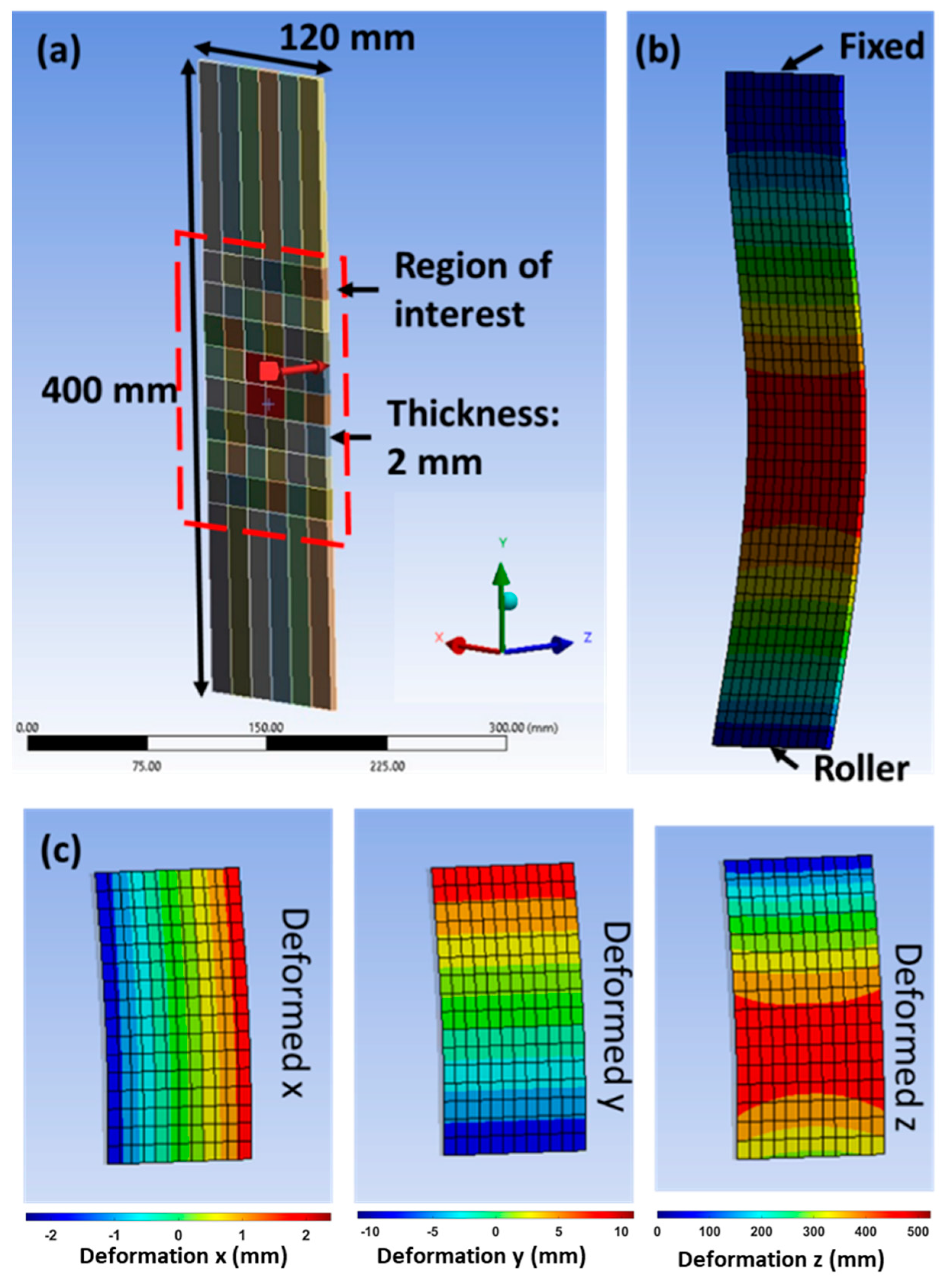
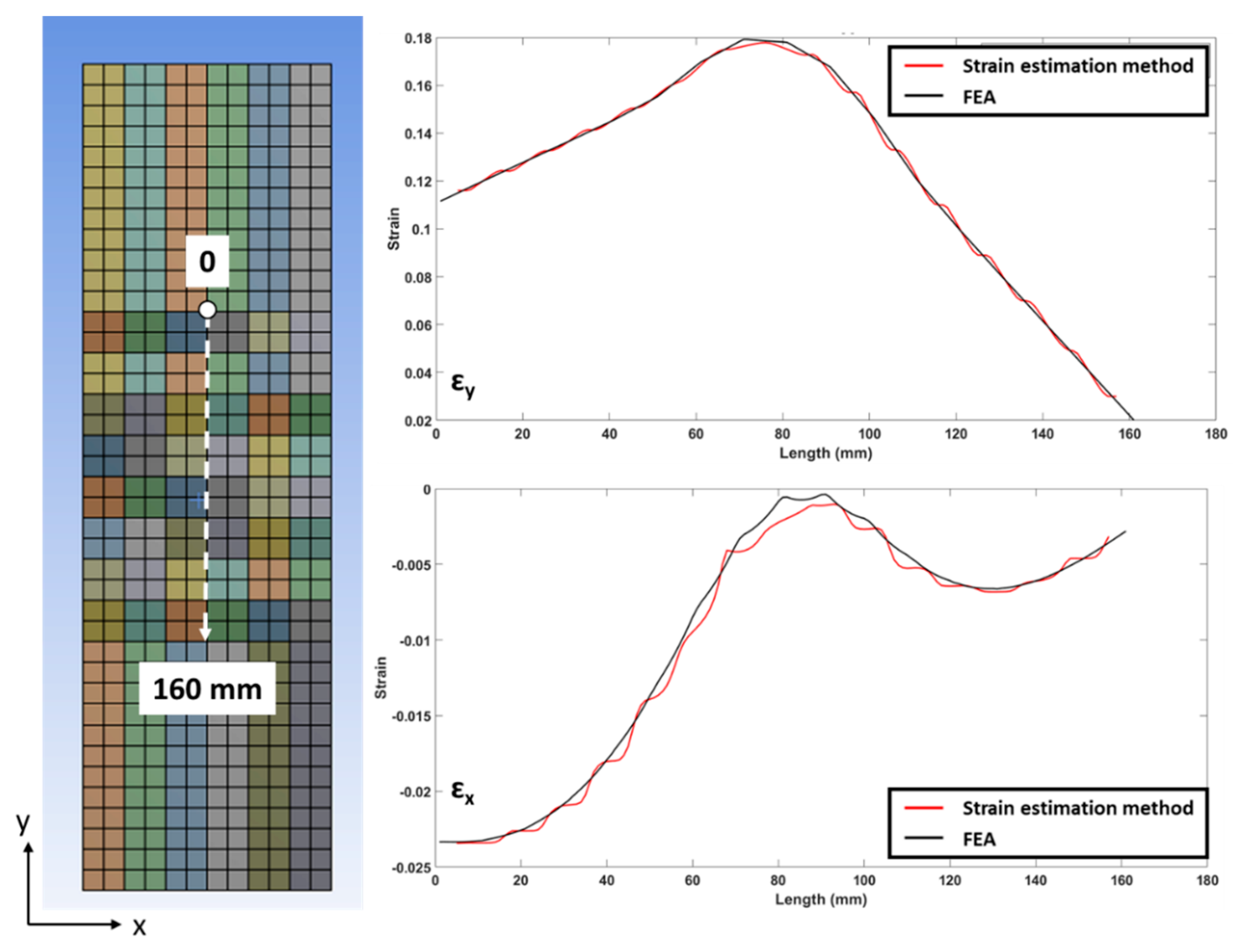
4. Conceptual Validation—Finite Element Analysis
5. Non-Contact In-Plane Movement Prediction Field Trial for WTP Floating Cover
6. Practical Implications of Work Reported
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Melbourne Water. Sewage Treatment Process at Western Treatment Plant; Melbourne Water: Victoria, Australia, 2019. [Google Scholar]
- Ma, Y.; Wong, L.; Vien, B.S.; Kuen, T.; Kodikara, J.; Chiu, W.K. Quasi-Active Thermal Imaging of Large Floating Covers Using Ambient Solar Energy. Remote Sens. 2020, 12, 3455. [Google Scholar] [CrossRef]
- Eisenbeiss, H.; Sauerbier, M. Investigation of UAV systems and flight modes for photogrammetric applications. Photogramm. Rec. 2011, 26, 400–421. [Google Scholar] [CrossRef]
- Lo Brutto, M.; Borruso, A.; Argenio, A. UAV systems for photogrammetric data acquisition of archaeological sites. Int. J. Herit. Digit. Era 2012, 1, 7–13. [Google Scholar] [CrossRef]
- Remondino, F.; Barazzetti, L.; Nex, F.; Scaioni, M.; Sarazzi, D. UAV Photogrammetry for Mapping and 3D Modelling-Current Status and Future Perspectives. In Proceedings of International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; ISPRSAR: Zurich, Switzerland, 2011; Volume 38. [Google Scholar]
- Gerke, M. Developments in UAV-photogrammetry. J. Digit. Landsc. Archit. 2018, 3, 262–272. [Google Scholar]
- Grytten, F.; Daiyan, H.; Polanco-Loria, M.; Dumoulin, S. Use of digital image correlation to measure large-strain tensile properties of ductile thermoplastics. Polym. Test. 2009, 28, 653–660. [Google Scholar] [CrossRef]
- Salvini, P.; Lux, V.; Marotta, E. Modal Pursuit to Detect Large Displacements and Strain Fields by Digital Image Correlation. Strain 2015, 51, 30–42. [Google Scholar] [CrossRef]
- Iadicola, M.A. Uncertainties of digital image correlation due to pattern degradation at large strain. In Advancement of Optical Methods in Experimental Mechanics, Proceedings of the 2015 Annual Conference on Experimental and Applied Mechanics, Costa Mesa, CA, USA, 8–11 June 2015; Jin, H., Yoshida, S., Lamberti, L., Lin, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; Volume 3, pp. 247–253. [Google Scholar]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. A Noncontacting Approach for Full-Field Strain Monitoring of Rotating Structures. J. Vib. Acoust. 2016, 138, 031008. [Google Scholar] [CrossRef]
- Baqersad, J. A Non-Contacting Approach for Full Field Dynamic Strain Monitoring of Rotating Structures Using the Photogrammetry, Finite Element and Modal Expansion Techniques. Ph.D. Thesis, University of Massachusetts Lowell, Lowell, MA, USA, 2015. [Google Scholar]
- Baqersad, J.; Niezrecki, C.; Avitabile, P. Full-field dynamic strain prediction on a wind turbine using displacements of optical targets measured by stereophotogrammetry. Mech. Syst. Signal Process. 2015, 62, 284–295. [Google Scholar] [CrossRef]
- Ong, W.H.; Chiu, W.K.; Kuen, T.; Kodikara, J. Determination of the State of Strain of Large Floating CoversUsing Unmanned Aerial Vehicle (UAV) Aided Photogrammetry. Sensors 2017, 17, 1731. [Google Scholar] [CrossRef] [PubMed]
- Vien, B.S.; Wong, L.; Kuen, T.; Courtney, F.; Kodikara, J.; Chiu, W.K. Strain Monitoring Strategy of Deformed Membrane Coverusing Unmanned Aerial Vehicle-Assisted 3D Photogrammetry. Remote Sens. 2020, 12, 2738. [Google Scholar] [CrossRef]
- Wong, L.; Vien, B.; Ma, Y.; Kuen, T.; Courtney, F.; Kodikara, J.; Rose, F.; Chiu, W. Development of Scum Geometrical Monitoring Beneath Floating Covers Aided by UAV Photogrammetry. Mater. Res. Proc. 2021, 18, 71–78. [Google Scholar]
- Wong, L.; Vien, B.S.; Ma, Y.; Kuen, T.; Courtney, F.; Kodikara, J.; Chiu, W.K. Remote Monitoring of Floating Covers Using UAV Photogrammetry. Remote Sens. 2020, 12, 1118. [Google Scholar] [CrossRef]
- Agisoft. Agisoft Metashape User Manual: Professional Edition, Version 1.5; Agisoft: St. Petersburg, Russia, 2019. [Google Scholar]
- Barazzetti, L.; Forlani, G.; Remondino, F.; Roncella, R.; Scaioni, M. Experiences and Achievements Inautomated Image Sequence Orientation for Close-Range Photogrammetric Projects. In Proceedings of the SPIE8085, Videometrics, Range Imaging and Applications XI, 80850F, Munich, Germany, 23–26 May 2011. [Google Scholar]
- Triggs, B.; Zisserman, A.; Szeliski, R. Bundle adjustment. A modern synthesis, Vision Algorithms: Theoryand Practice. In Proceedings of the International Workshop on Vision Algorithms, Corfu, Greece, 21–22 September 1999; Springer: Berlin, Germany, 2000. [Google Scholar]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. Structure-from-motion photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Guenfoud, H.; Himeur, M.; Ziou, H.; Guenfoud, M. A consistent triangular thin flat shell finite element with drilling rotation based on the strain approach. Int. J. Struct. Eng. 2018, 9, 191–223. [Google Scholar] [CrossRef]
- Batoz, J.; Bathe, K.; Ho, L. A Study of Three-Node Triangular Plate Bending Elements. Int. J. Numer. Methods Eng. 1980, 15, 1771–1821. [Google Scholar] [CrossRef]
- Kattan, P. The Linear Triangular Element. In MATLAB Guide to Finite Elements; Springer: Berlin/Heidelberg, Germany, 2008; pp. 217–247. [Google Scholar]
- MathWorks. Working with Delaunay Triangulations; MathWorks: Portola Valley, CA, USA, 2021. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Fixed Wing Sensefly eBee with Sony WX220 | M600 Pro with Zenmuse X5 Camera (15 mm Lens) | ||
|---|---|---|---|---|
| Site | WTP Lagoon Cover 1 | |||
| Mapped area | 450 m × 220 m | |||
| Trial Scan | t1 | t2 | t3 | t4 |
| Total images taken | 133 | 793 | 928 | 929 |
| Image resolution | 4896 × 3672 | 4608 × 3456 | ||
| Flight method | Manual | Single grid programmed flight path (Pix4D Capture) | ||
| Overlap (%) | ||||
| (I) Longer side | 30 (estimated) | 80 | 80 | 80 |
| (II) Shorter side | 40 (estimated) | 70 | 80 | 80 |
| Flight altitude | 60 m AGL | 50 m AGL | ||
| Metashape Photogrammetry setting | High Alignment & High Dense cloud configuration | |||
| Spatial resolution for DEM (photogrammetry) | 2.75 cm/pixel | 1.14 cm/pixel | 1.11 cm/pixel | 1.11 cm/pixel |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wong, L.; Vien, B.S.; Kuen, T.; Bui, D.N.; Kodikara, J.; Chiu, W.K. Non-Contact In-Plane Movement Estimation of Floating Covers Using Finite Element Formulation on Field-Scale DEM. Remote Sens. 2022, 14, 4761. https://doi.org/10.3390/rs14194761
Wong L, Vien BS, Kuen T, Bui DN, Kodikara J, Chiu WK. Non-Contact In-Plane Movement Estimation of Floating Covers Using Finite Element Formulation on Field-Scale DEM. Remote Sensing. 2022; 14(19):4761. https://doi.org/10.3390/rs14194761
Chicago/Turabian StyleWong, Leslie, Benjamin Steven Vien, Thomas Kuen, Dat Nha Bui, Jayantha Kodikara, and Wing Kong Chiu. 2022. "Non-Contact In-Plane Movement Estimation of Floating Covers Using Finite Element Formulation on Field-Scale DEM" Remote Sensing 14, no. 19: 4761. https://doi.org/10.3390/rs14194761
APA StyleWong, L., Vien, B. S., Kuen, T., Bui, D. N., Kodikara, J., & Chiu, W. K. (2022). Non-Contact In-Plane Movement Estimation of Floating Covers Using Finite Element Formulation on Field-Scale DEM. Remote Sensing, 14(19), 4761. https://doi.org/10.3390/rs14194761