
RGB-ICP Method to Calculate Ground Three-Dimensional Deformation Based on Point Cloud from Airborne LiDAR


Abstract
:1. Introduction
2. Methodology
2.1. Methods
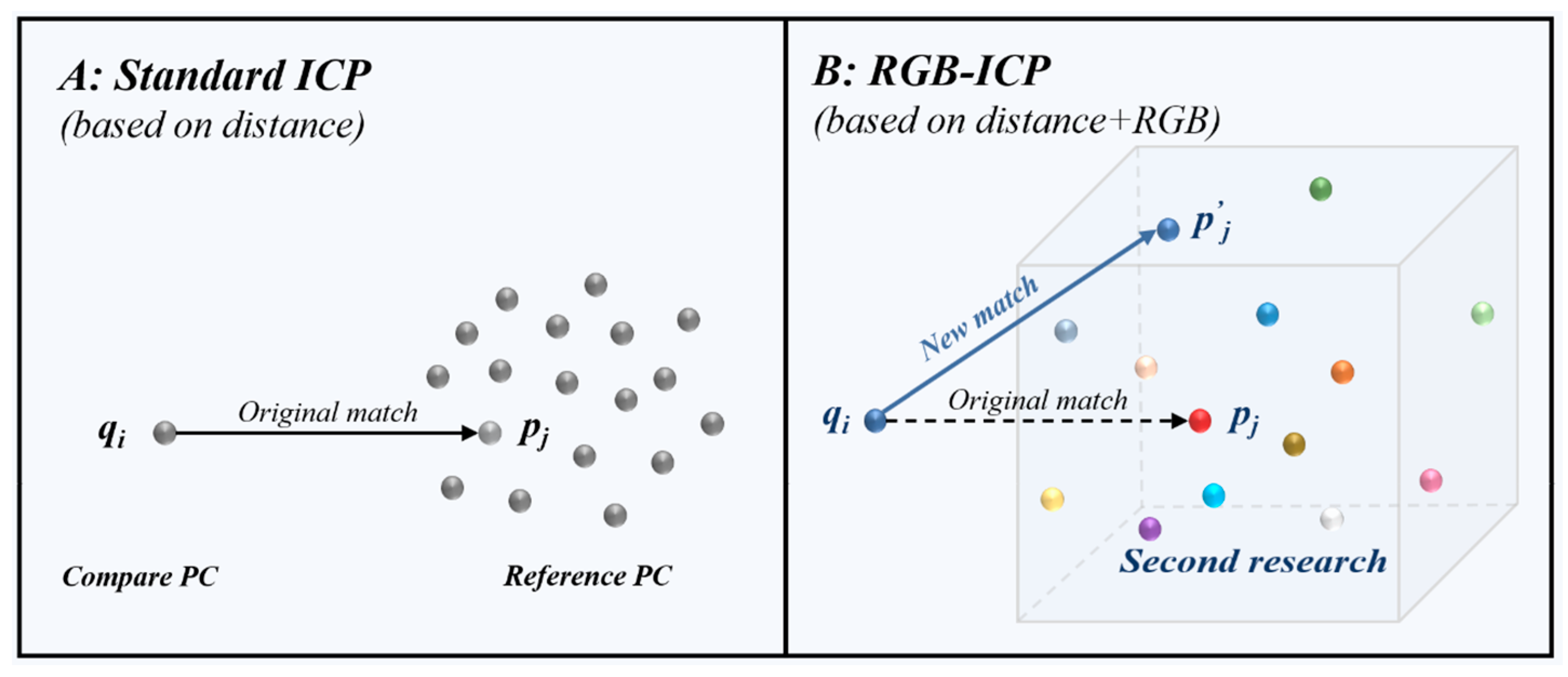
2.1.1. Standard ICP Method
- 1.
- Match: Usingor transformation matrix M0 or transformation matrix Mk−1 after the last iteration, the set of moving points, Q, is transformed, and the nearest point pi corresponding to each point qi is found by calculating the spatial three-dimensional Euclidean distance, where the distance between point qi and point sets P is defined as follows:
- 2.
- Transform: Moving the set of points, Q, under a given spatial transformation including rotation R and translation T minimizes the distance error metric between matched pairs of points, at which point the solved is the optimal transformation. The literature [34,35] gives two different ways of error metrics.
- 3.
- Iterative calculation and threshold judgment: After applying the optimal transformation to the set of moving points, Q, the above steps are repeated to complete the next iterative transformation. The ICP algorithm can define the absolute increment of rotation Rd and translation Td during successive iterations as the basis for judgment:
2.1.2. Improved RGB-ICP Method
- For a set of associated point pairs, the nearest point pj is used as the core to expand the range to search the neighboring points, and all neighboring points under this search domain, Ω, are defined as candidate points. The search methods include: the KNN neighboring algorithm, sphere division, and cubic dissection;
- The RGB distance between moving point qi and candidate points is calculated (Equation (5)), and the most similar color point is selected:
- After color filtering, the acquired new matching point pairs continue to participate in subsequent calculations.
2.2. Data
3. Results
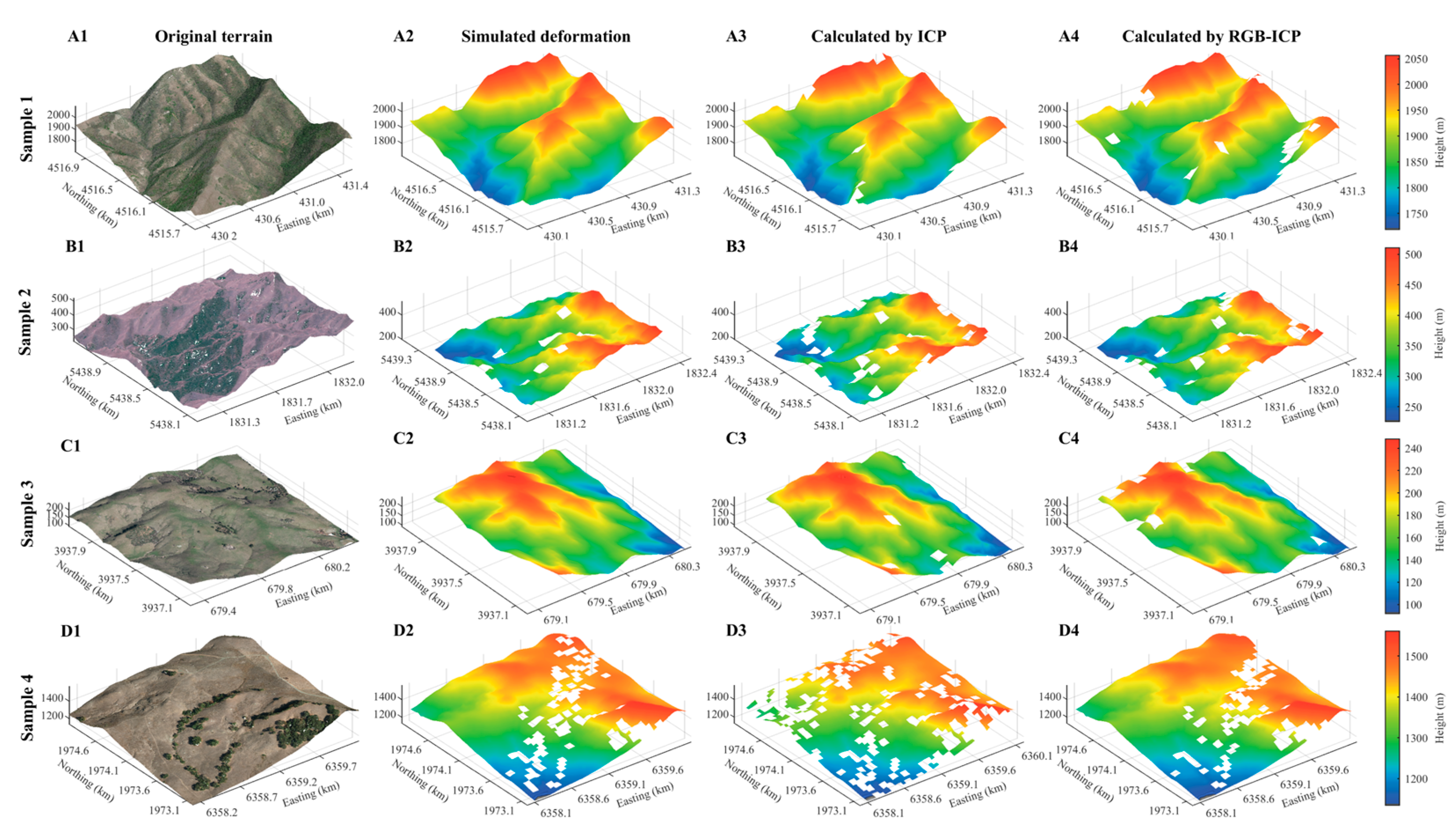
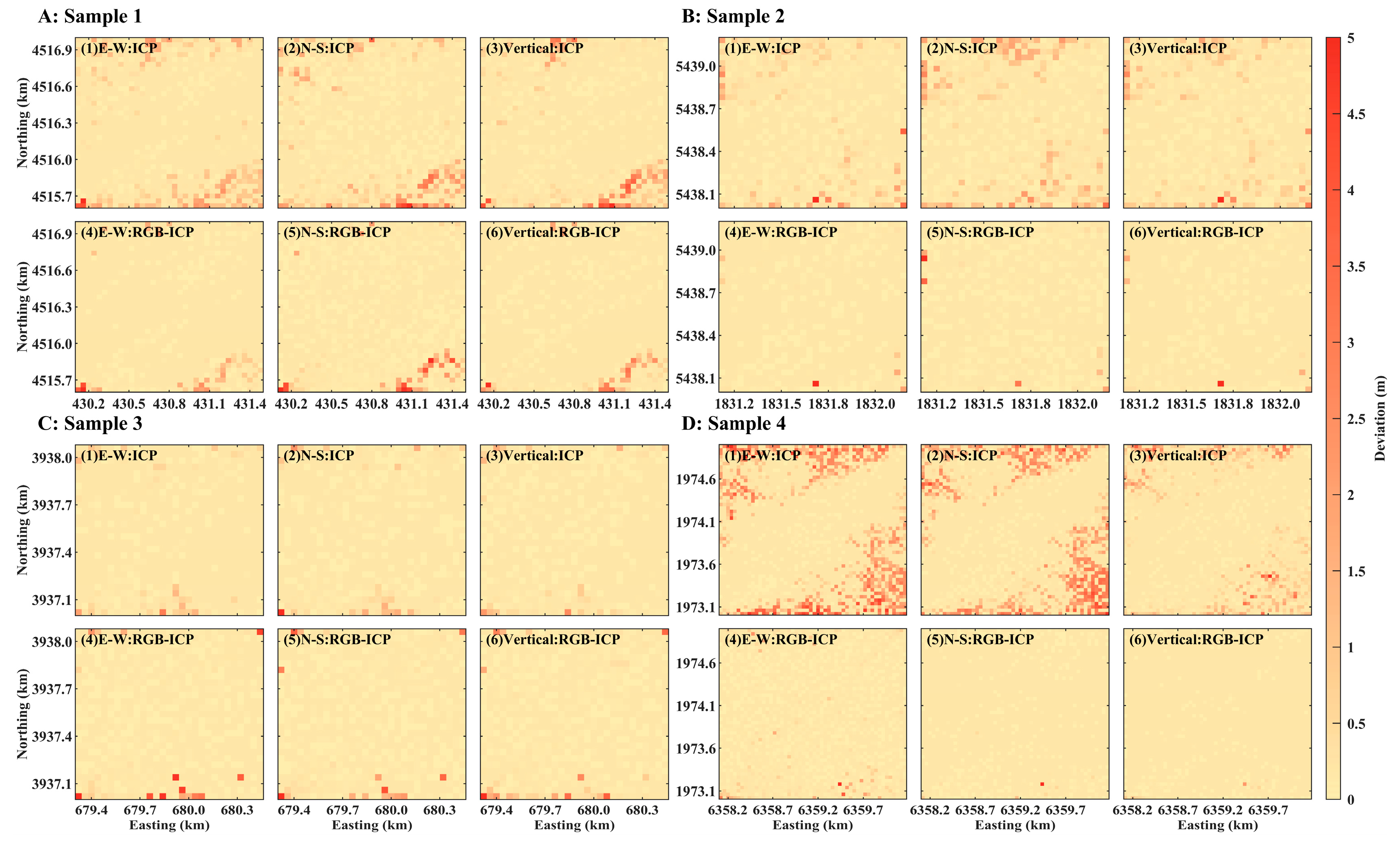
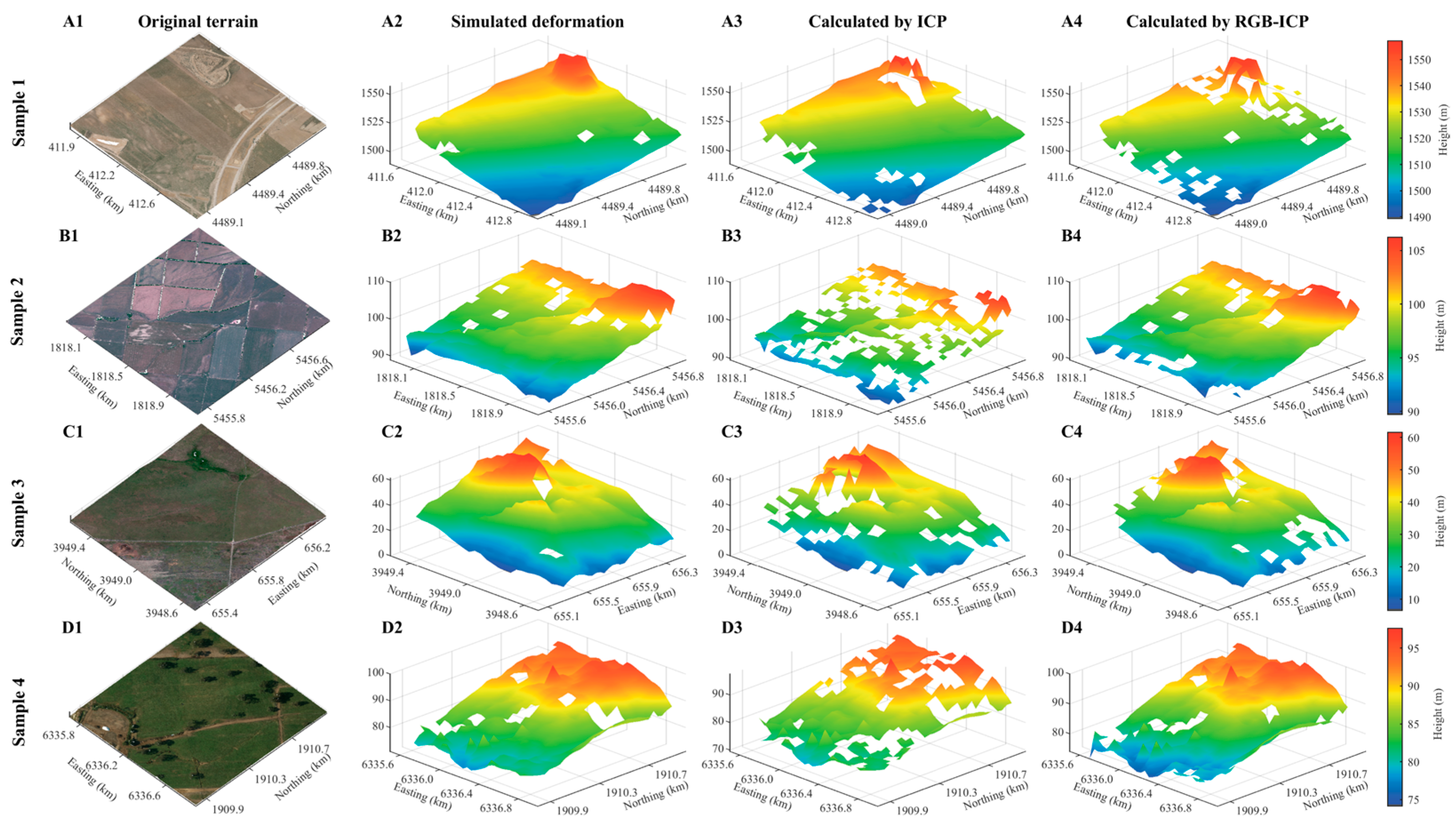
3.1. Simulated Deformation
3.2. Experimental Results
3.2.1. Rough Terrain
3.2.2. Smooth Terrain
3.3. Overall Evaluation
3.4. Window Size Effect
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Besoya, M.; Govil, H.; Bhaumik, P. A review on surface deformation evaluation using multitemporal SAR interferometry techniques. Spat. Inf. Res. 2021, 29, 267–280. [Google Scholar] [CrossRef]
- Zhang, F.; Pei, H.; Zhu, H.; Wang, L. Research review of large deformation monitoring of rock and soil. IOP Conf. Ser. Earth Environ. Sci. 2021, 861, 042030. [Google Scholar] [CrossRef]
- Dong, P.; Chen, Q. LiDAR Remote Sensing and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Liu, B.; Ma, X.; Ma, Y.; Li, H.; Jin, S.; Fan, R.; Gong, W. The relationship between atmospheric boundary layer and temperature inversion layer and their aerosol capture capabilities. Atmos. Res. 2022, 271, 106121. [Google Scholar] [CrossRef]
- Pei, Z.; Han, G.; Ma, X.; Shi, T.; Gong, W. A method for estimating the background column concentration of CO2 using the lagrangian approach. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4108112. [Google Scholar] [CrossRef]
- Luo, B.; Yang, J.; Song, S.; Shi, S.; Gong, W.; Wang, A.; Du, L. Target classification of similar spatial characteristics in complex urban areas by using multispectral LiDAR. Remote Sens. 2022, 14, 238. [Google Scholar] [CrossRef]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Glennie, C.L.; Carter, W.E.; Shrestha, R.L.; Dietrich, W.E. Geodetic imaging with airborne LiDAR: The Earth’s surface revealed. Rep. Prog. Phys. 2013, 76, 86801. [Google Scholar] [CrossRef]
- Geist, T.; Lutz, E.; Stötter, J. Airborne Laser Scanning Technology and Its Potential for Applications in Glaciology. Ph.D. Thesis, University of Innsbruck, Innsbruck, Austria, 2003. [Google Scholar]
- Joerg, P.C.; Morsdorf, F.; Zemp, M. Uncertainty assessment of multi-temporal airborne laser scanning data: A case study on an Alpine glacier. Remote Sens. Environ. 2012, 127, 118–129. [Google Scholar] [CrossRef]
- Albino, F.; Smets, B.; d’Oreye, N.; Kervyn, F. High-resolution TanDEM-X DEM: An accurate method to estimate lava flow volumes at Nyamulagira Volcano (DR Congo). J. Geophys. Res. Solid Earth 2015, 120, 4189–4207. [Google Scholar] [CrossRef]
- Behncke, B.; Fornaciai, A.; Neri, M.; Favalli, M.; Ganci, G.; Mazzarini, F. Lidar surveys reveal eruptive volumes and rates at Etna, 2007–2010. Geophys. Res. Lett. 2016, 43, 4270–4278. [Google Scholar] [CrossRef] [Green Version]
- Croke, J.; Todd, P.; Thompson, C.; Watson, F.; Denham, R.; Khanal, G. The use of multi temporal LiDAR to assess basin-scale erosion and deposition following the catastrophic January 2011 Lockyer flood, SE Queensland, Australia. Geomorphology 2013, 184, 111–126. [Google Scholar] [CrossRef]
- Bull, J.; Miller, H.; Gravley, D.; Costello, D.; Hikuroa, D.; Dix, J. Assessing debris flows using LiDAR differencing: 18 May 2005 Matata event, New Zealand. Geomorphology 2010, 124, 75–84. [Google Scholar] [CrossRef]
- Pye, K.; Blott, S.J. Assessment of beach and dune erosion and accretion using LiDAR: Impact of the stormy 2013–14 winter and longer term trends on the Sefton Coast, UK. Geomorphology 2016, 266, 146–167. [Google Scholar] [CrossRef]
- Burns, W.J.; Coe, J.A.; Kaya, B.S.; Ma, L. Analysis of elevation changes detected from multi-temporal LiDAR surveys in forested landslide terrain in western Oregon. Environ. Eng. Geosci. 2010, 16, 315–341. [Google Scholar] [CrossRef]
- DeLong, S.B.; Prentice, C.S.; Hilley, G.E.; Ebert, Y. Multitemporal ALSM change detection, sediment delivery, and process mapping at an active earthflow. Earth Surf. Processes Landf. 2012, 37, 262–272. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.d.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Oskin, M.E.; Arrowsmith, J.R.; Corona, A.H.; Elliott, A.J.; Fletcher, J.M.; Fielding, E.J.; Gold, P.O.; Garcia, J.J.G.; Hudnut, K.W.; Liu-Zeng, J. Near-field deformation from the El Mayor–Cucapah earthquake revealed by differential LiDAR. Science 2012, 335, 702–705. [Google Scholar] [CrossRef]
- Nissen, E.; Maruyama, T.; Arrowsmith, J.R.; Elliott, J.R.; Krishnan, A.K.; Oskin, M.E.; Saripalli, S. Coseismic fault zone deformation revealed with differential lidar: Examples from Japanese Mw∼ 7 intraplate earthquakes. Earth Planet. Sci. Lett. 2014, 405, 244–256. [Google Scholar] [CrossRef]
- Clark, K.; Nissen, E.; Howarth, J.; Hamling, I.; Mountjoy, J.; Ries, W.; Jones, K.; Goldstien, S.; Cochran, U.; Villamor, P. Highly variable coastal deformation in the 2016 Mw7. 8 Kaikōura earthquake reflects rupture complexity along a transpressional plate boundary. Earth Planet. Sci. Lett. 2017, 474, 334–344. [Google Scholar] [CrossRef]
- Ekhtari, N.; Glennie, C. High-resolution mapping of near-field deformation with airborne Earth observation data, a comparison study. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1598–1614. [Google Scholar] [CrossRef]
- Lajoie, L.J.; Nissen, E.; Johnson, K.L.; Arrowsmith, J.R.; Glennie, C.L.; Hinojosa-Corona, A.; Oskin, M.E. Extent of low-angle normal slip in the 2010 El Mayor-Cucapah (Mexico) earthquake from differential lidar. J. Geophys. Res. Solid Earth 2019, 124, 943–956. [Google Scholar] [CrossRef]
- Scott, C.; Bunds, M.; Shirzaei, M.; Toke, N. Creep along the Central San Andreas Fault from surface fractures, topographic differencing, and InSAR. J. Geophys. Res. Solid Earth 2020, 125, e2020JB019762. [Google Scholar] [CrossRef]
- Yin, T.; Cook, B.D.; Morton, D.C. Three-dimensional estimation of deciduous forest canopy structure and leaf area using multi-directional, leaf-on and leaf-off airborne lidar data. Agric. For. Meteorol. 2022, 314, 108781. [Google Scholar] [CrossRef]
- Xu, W.; Wang, W.; Wang, N.; Chen, B. A New Algorithm for Himawari-8 Aerosol Optical Depth Retrieval by Integrating Regional PM2.5 Concentrations. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar]
- Wheaton, J.M. Uncertainity in Morphological Sediment Budgeting of Rivers. Original typescript. Ph.D. Thesis, University of Southampton, Southampton, UK, 2008. [Google Scholar]
- Duffy, B.; Quigley, M.; Barrell, D.J.; Van Dissen, R.; Stahl, T.; Leprince, S.; McInnes, C.; Bilderback, E. Fault kinematics and surface deformation across a releasing bend during the 2010 MW 7.1 Darfield, New Zealand, earthquake revealed by differential LiDAR and cadastral surveying. Bulletin 2013, 125, 420–431. [Google Scholar] [CrossRef]
- Keane, R.D.; Adrian, R.J. Theory of cross-correlation analysis of PIV images. Appl. Sci. Res. 1992, 49, 191–215. [Google Scholar] [CrossRef]
- Leprince, S.; Ayoub, F.; Klinger, Y.; Avouac, J.-P. Co-registration of optically sensed images and correlation (COSI-Corr): An operational methodology for ground deformation measurements. In Proceedings of the 2007 IEEE international geoscience and remote sensing symposium, Barcelona, Spain, 23–28 July 2017; pp. 1943–1946. [Google Scholar]
- Lydaa, A.; Zhang, X.; Glennie, C.; Hudnut, K.; Brooks, B. Airborne light detection and ranging (lidar) derived deformation from the MW 6.0 24 August, 2014 South Napa earthquake estimated by two and three dimensional point cloud change detection techniques. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 35–42. [Google Scholar] [CrossRef]
- Okyay, U.; Telling, J.; Glennie, C.L.; Dietrich, W.E. Airborne lidar change detection: An overview of Earth sciences applications. Earth-Sci. Rev. 2019, 198, 102929. [Google Scholar] [CrossRef]
- Mukoyama, S. Estimation of ground deformation caused by the earthquake (M7. 2) in Japan, 2008, from the geomorphic image analysis of high resolution LiDAR DEMs. J. Mt. Sci. 2011, 8, 239–245. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Sensor fusion IV: Control paradigms and data structures, Boston, MA, USA, 12–15 November 1991; pp. 586–606. [Google Scholar]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Nissen, E.; Krishnan, A.K.; Arrowsmith, J.R.; Saripalli, S. Three-dimensional surface displacements and rotations from differencing pre-and post-earthquake LiDAR point clouds. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Glennie, C.L.; Hinojosa-Corona, A.; Nissen, E.; Kusari, A.; Oskin, M.E.; Arrowsmith, J.R.; Borsa, A. Optimization of legacy lidar data sets for measuring near-field earthquake displacements. Geophys. Res. Lett. 2014, 41, 3494–3501. [Google Scholar] [CrossRef]
- Scott, C.P.; Arrowsmith, J.R.; Nissen, E.; Lajoie, L.; Maruyama, T.; Chiba, T. The M7 2016 Kumamoto, Japan, earthquake: 3-D deformation along the fault and within the damage zone constrained from differential lidar topography. J. Geophys. Res. Solid Earth 2018, 123, 6138–6155. [Google Scholar] [CrossRef]
- Scott, C.; Champenois, J.; Klinger, Y.; Nissen, E.; Maruyama, T.; Chiba, T.; Arrowsmith, R. The 2016 M7 Kumamoto, Japan, earthquake slip field derived from a joint inversion of differential lidar topography, optical correlation, and InSAR surface displacements. Geophys. Res. Lett. 2019, 46, 6341–6351. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, W.; Wang, M.; Zhong, D.; Du, S. Color point cloud registration based on supervoxel correspondence. Ieee Access 2020, 8, 7362–7372. [Google Scholar] [CrossRef]
- Johnson, A.E.; Kang, S.B. Registration and integration of textured 3D data. Image Vis. Comput. 1999, 17, 135–147. [Google Scholar] [CrossRef]
- Korn, M.; Holzkothen, M.; Pauli, J. Color supported generalized-ICP. In Proceedings of the 2014 International Conference on Computer Vision Theory and Applications (VISAPP); pp. 592–599.
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- de Berg, M.; Streppel, M. Approximate range searching using binary space partitions. Comput. Geom. 2006, 33, 139–151. [Google Scholar] [CrossRef]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-squares fitting of two 3-D point sets. IEEE Trans. Pattern Anal. Mach. Intell. 1987, PAMI-9, 698–700. [Google Scholar] [CrossRef]
- Horn, B.K.; Hilden, H.M.; Negahdaripour, S. Closed-form solution of absolute orientation using orthonormal matrices. JOSA A 1988, 5, 1127–1135. [Google Scholar] [CrossRef]
- Walker, M.W.; Shao, L.; Volz, R.A. Estimating 3-D location parameters using dual number quaternions. CVGIP Image Underst. 1991, 54, 358–367. [Google Scholar] [CrossRef] [Green Version]
- Chengxiang, L.; Shuangchen, R.; Fuming, L. Analysis on the reliability of terrain matching algorithm based on ICP. J. Shenzhen Univ. (Sci. Technol.) 2005, 22, 22–26. [Google Scholar]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Proceedings third international conference on 3-D digital imaging and modeling; pp. 145–152.
- Tian, Y.; Liu, X.; Li, L.; Wang, W. Intensity-assisted ICP for fast registration of 2D-LiDAR. Sensors 2019, 19, 2124. [Google Scholar] [CrossRef]
- Pulli, K.; Shapiro, L.G. Surface reconstruction and display from range and color data. Graph. Models 2000, 62, 165–201. [Google Scholar] [CrossRef]
- Liu, P.; Wang, Y.; Huang, D.; Zhang, Z. Recognizing occluded 3D faces using an efficient ICP variant. In Proceedings of the 2012 IEEE International Conference on Multimedia and Expo, Melbourne, Australia, 9–13 July 2012; pp. 350–355. [Google Scholar]
- Guo, Y.; Zhao, L.; Shi, Y.; Zhang, X.; Du, S.; Wang, F. Adaptive weighted robust iterative closest point. Neurocomputing 2022, 508, 225–241. [Google Scholar] [CrossRef]
- Mavridis, P.; Andreadis, A.; Papaioannou, G. Efficient sparse icp. Comput. Aided Geom. Des. 2015, 35, 16–26. [Google Scholar] [CrossRef]
- Wang, F.; Zhao, Z. A survey of iterative closest point algorithm. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 4395–4399. [Google Scholar]
- Zhang, X.; Glennie, C.; Kusari, A. Change detection from differential airborne LiDAR using a weighted anisotropic iterative closest point algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3338–3346. [Google Scholar] [CrossRef]
- Łępicka, M.; Kornuta, T.; Stefańczyk, M. Utilization of colour in ICP-based point cloud registration. In Proceedings of the 9th International Conference on Computer Recognition Systems CORES 2015, Wroclaw, Poland, 25–27 May 2015; pp. 821–830. [Google Scholar]
- Men, H.; Gebre, B.; Pochiraju, K. Color point cloud registration with 4D ICP algorithm. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1511–1516. [Google Scholar]
- Takimoto, R.Y.; Tsuzuki, M.S.; Vogelaar, R.; Martins, T.C.; Iwao, Y.; Gotoh, T.; Kagei, S.; Gallo, G.B.; Garcia, M.A.; Tiba, H. Shape reconstruction from multiple RGB-D point cloud registration. In Proceedings of the 2014 12th IEEE International Conference on Industrial Informatics (INDIN), Porto Alegre, Brazil, 27–30 July 2014; pp. 349–352. [Google Scholar]
- Rhee, S.-M.; Lee, Y.B.; Lee, H.-E. Two-pass icp with color constraint for noisy rgb-d point cloud registration. In Proceedings of the 2014 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 10–13 January 2014; pp. 89–90. [Google Scholar]
- Scott, C.; Phan, M.; Nandigam, V.; Crosby, C.; Arrowsmith, J.R. Measuring change at Earth’s surface: On-demand vertical and three-dimensional topographic differencing implemented in OpenTopography. Geosphere 2021, 17, 1318–1332. [Google Scholar] [CrossRef]
- Pomerleau, F.; Magnenat, S.; Colas, F.; Liu, M.; Siegwart, R. Tracking a depth camera: Parameter exploration for fast ICP. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3824–3829. [Google Scholar]
- Attia, M.; Slama, Y. Efficient initial guess determination based on 3D point cloud projection for ICP algorithms. In Proceedings of the 2017 International Conference on High Performance Computing & Simulation (HPCS), Genoa, Italy, 17–21 July 2017; pp. 807–814. [Google Scholar]
- Park, J.; Zhou, Q.-Y.; Koltun, V. Colored point cloud registration revisited. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 143–152. [Google Scholar]
- Ye, Q.; Yao, Y.; Gui, P.; Lin, Y. An improved ICP algorithm for kinect point cloud registration. In Proceedings of the 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 13–15 August 2016; pp. 2109–2114. [Google Scholar]
- Lee, B.; Lee, D.D. Learning anisotropic ICP (LA-ICP) for robust and efficient 3D registration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5040–5045. [Google Scholar]
- Qin, R.; Tian, J.; Reinartz, P. 3D change detection–approaches and applications. ISPRS J. Photogramm. Remote Sens. 2016, 122, 41–56. [Google Scholar] [CrossRef]
- Shi, X.; Liu, T.; Han, X. Improved Iterative Closest Point (ICP) 3D point cloud registration algorithm based on point cloud filtering and adaptive fireworks for coarse registration. Int. J. Remote Sens. 2020, 41, 3197–3220. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Name | Survey Date | Class | Terrain | Average Slope (°) | Point Density (pts∙m−2) |
|---|---|---|---|---|---|
| Wasatch Front, State of Utah | 2013–2014 | Ground | Rough | 29.0 | 5.6 |
| Smooth | 2.8 | 7.2 | |||
| Wellington, New Zealand | 2013 | Ground | Rough | 32.3 | 1.2 |
| Smooth | 0.9 | 4.5 | |||
| San Simeon, PG&E DCPP | Feb 2013 | Ground | Rough | 17.1 | 5.6 |
| Smooth | 4.5 | 3.2 | |||
| Sonoma County, UMD-NASA | Oct 2013 | All | Rough | 15.5 | 0.9 |
| Smooth | 2.2 | 0.7 |
| Dataset Name | Algorithm Type | Rough Terrain | Smooth Terrain | ||||
|---|---|---|---|---|---|---|---|
| MAEx | MAEy | MAEz | MAEx | MAEy | MAEz | ||
| Wasatch Front, State of Utah | ICP | 0.488 | 0.298 | 0.243 | 1.789 | 1.680 | 0.087 |
| RGB-ICP | 0.179 | 0.128 | 0.116 | 0.752 | 0.619 | 0.045 | |
| Wellington, New Zealand | ICP | 0.285 | 0.384 | 0.215 | 2.339 | 2.356 | 0.046 |
| RGB-ICP | 0.096 | 0.094 | 0.072 | 0.231 | 0.241 | 0.028 | |
| San Simeon, PG&E DCPP | ICP | 0.212 | 0.205 | 0.064 | 1.321 | 1.261 | 0.064 |
| RGB-ICP | 0.128 | 0.125 | 0.045 | 0.270 | 0.239 | 0.031 | |
| Sonoma County, UMD-NASA | ICP | 0.835 | 0.849 | 0.161 | 1.345 | 1.353 | 0.048 |
| RGB-ICP | 0.034 | 0.038 | 0.016 | 0.038 | 0.049 | 0.021 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sang, M.; Wang, W.; Pan, Y. RGB-ICP Method to Calculate Ground Three-Dimensional Deformation Based on Point Cloud from Airborne LiDAR. Remote Sens. 2022, 14, 4851. https://doi.org/10.3390/rs14194851
Sang M, Wang W, Pan Y. RGB-ICP Method to Calculate Ground Three-Dimensional Deformation Based on Point Cloud from Airborne LiDAR. Remote Sensing. 2022; 14(19):4851. https://doi.org/10.3390/rs14194851
Chicago/Turabian StyleSang, Mengting, Wei Wang, and Yani Pan. 2022. "RGB-ICP Method to Calculate Ground Three-Dimensional Deformation Based on Point Cloud from Airborne LiDAR" Remote Sensing 14, no. 19: 4851. https://doi.org/10.3390/rs14194851