


Ground Penetrating Radar in Coastal Hazard Mitigation Studies Using Deep Convolutional Neural Networks




Abstract
:1. Introduction
2. Methodology
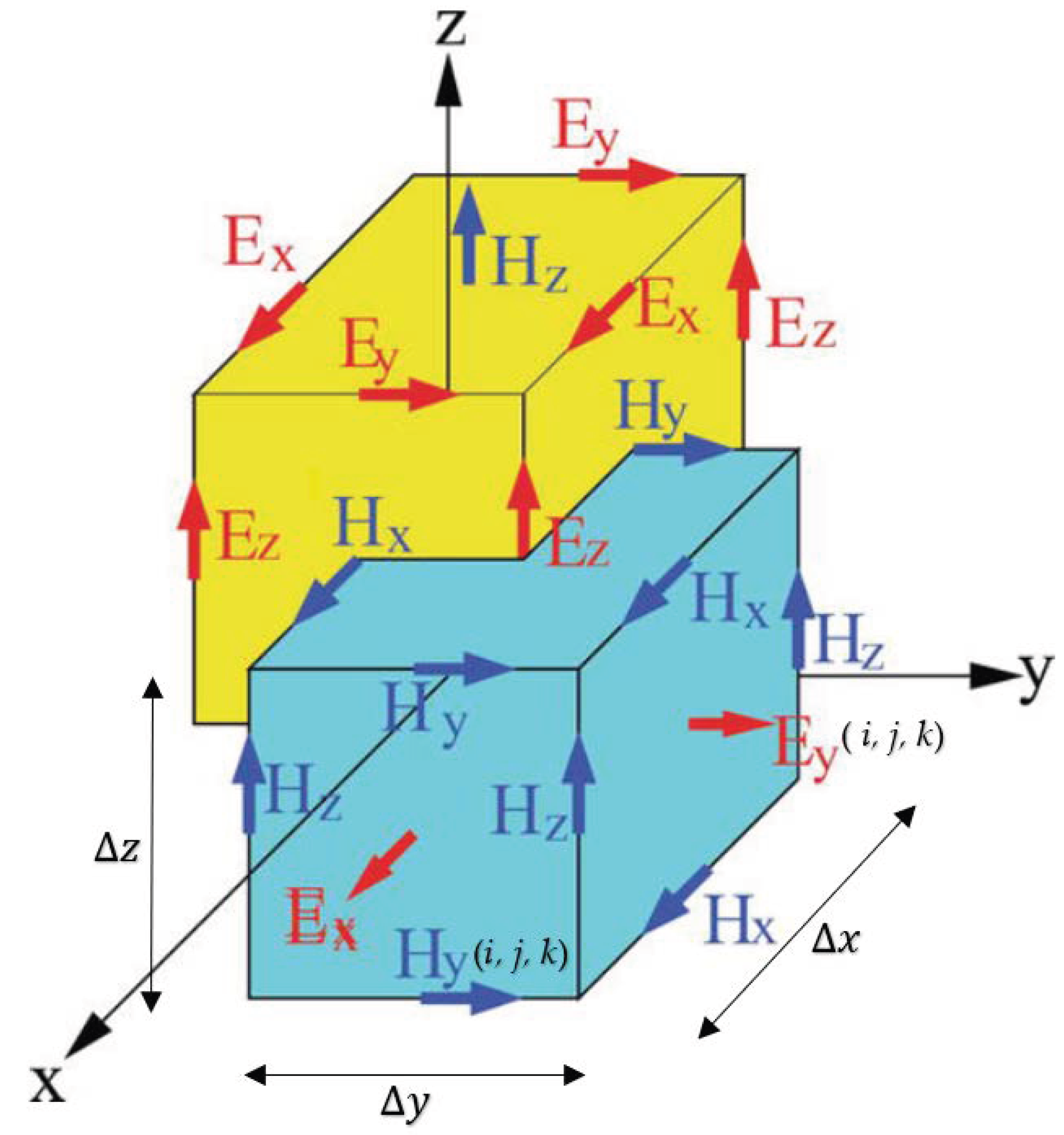
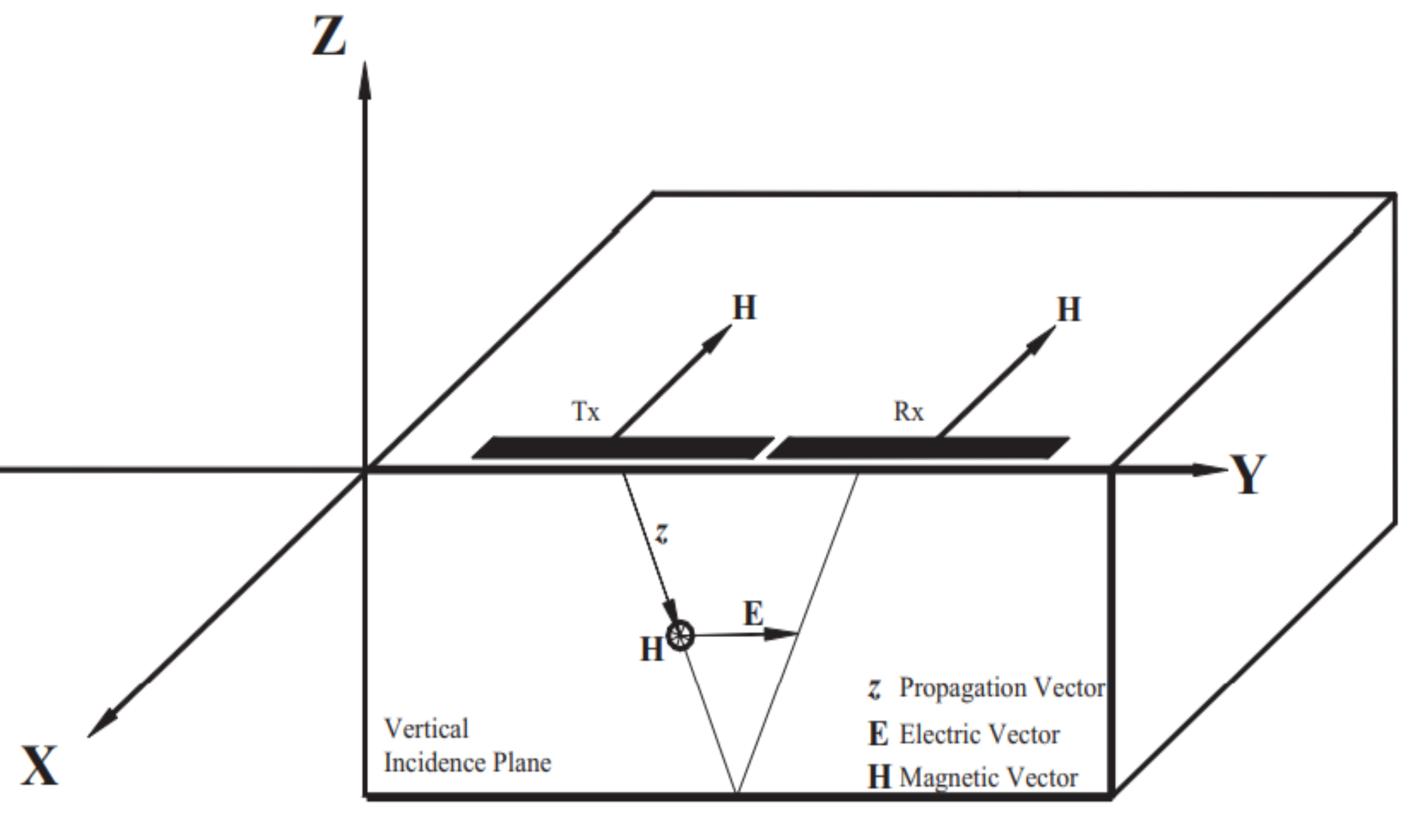
2.1. Forward Modeling
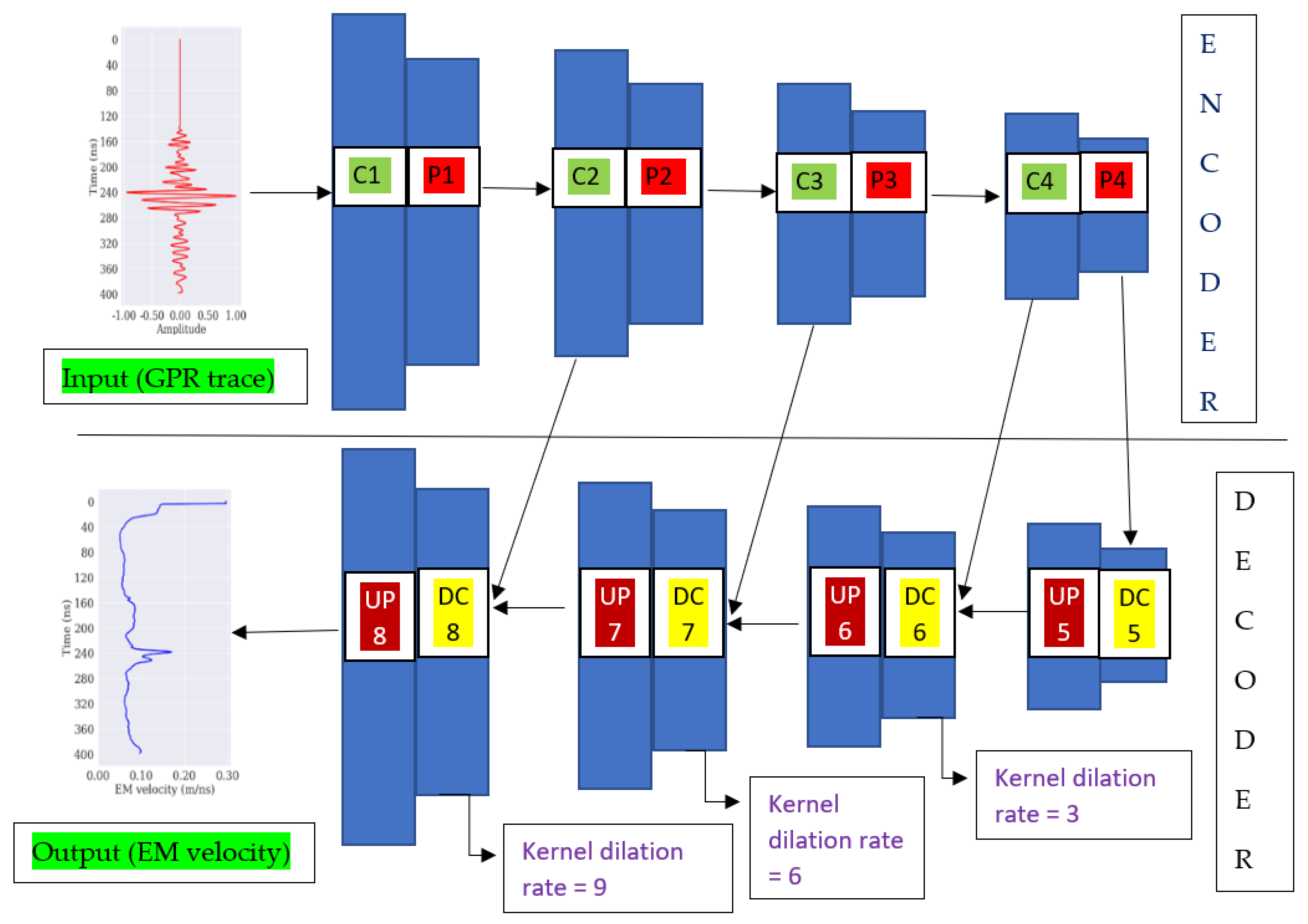
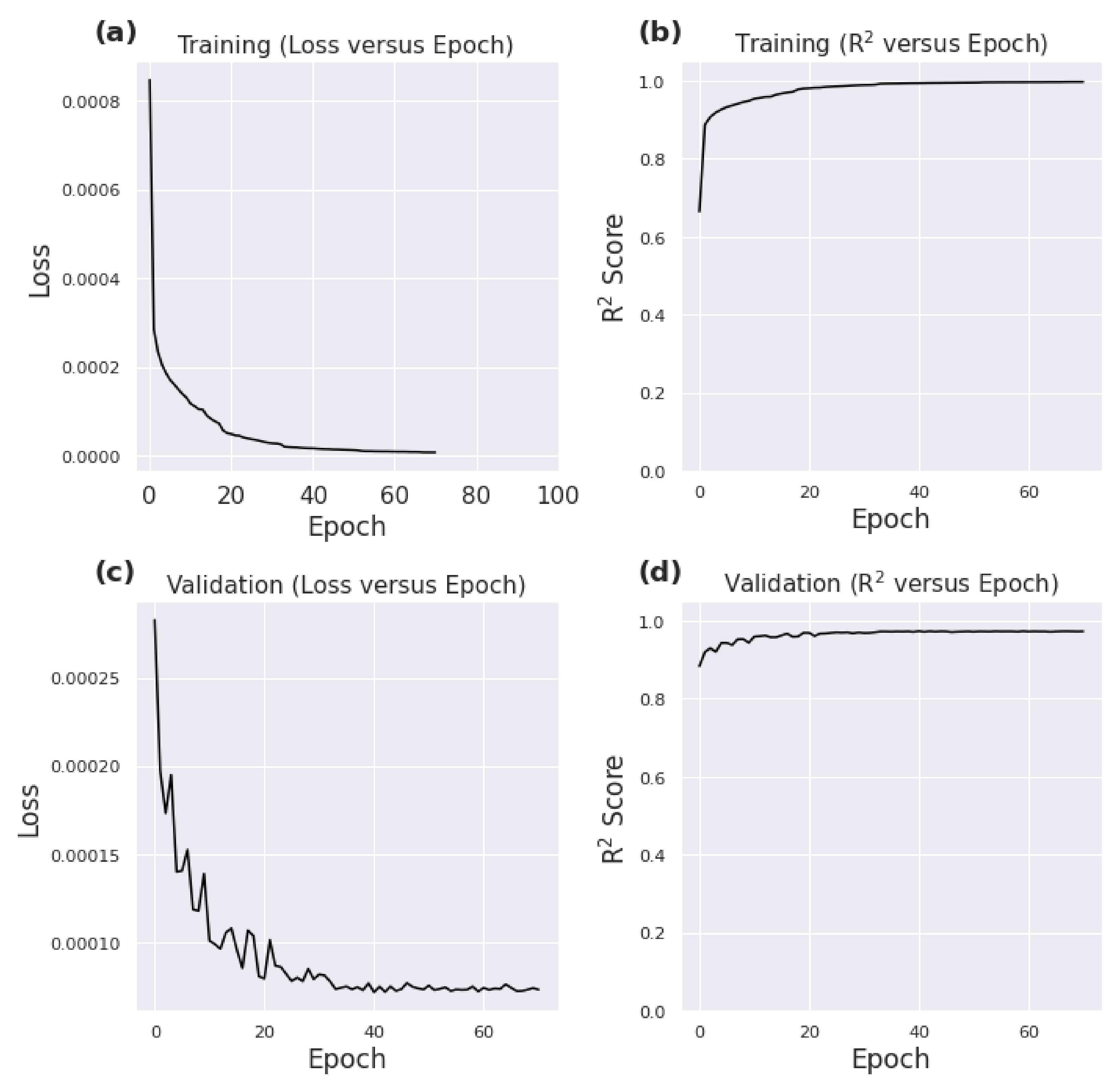
2.2. Inverse Modeling: Deep Convolutional Neural Networks (DCNNs)
2.3. Workflow for Inversion Using DCNNs
3. Simulated Examples
3.1. Generating the Synthetic GPR Data
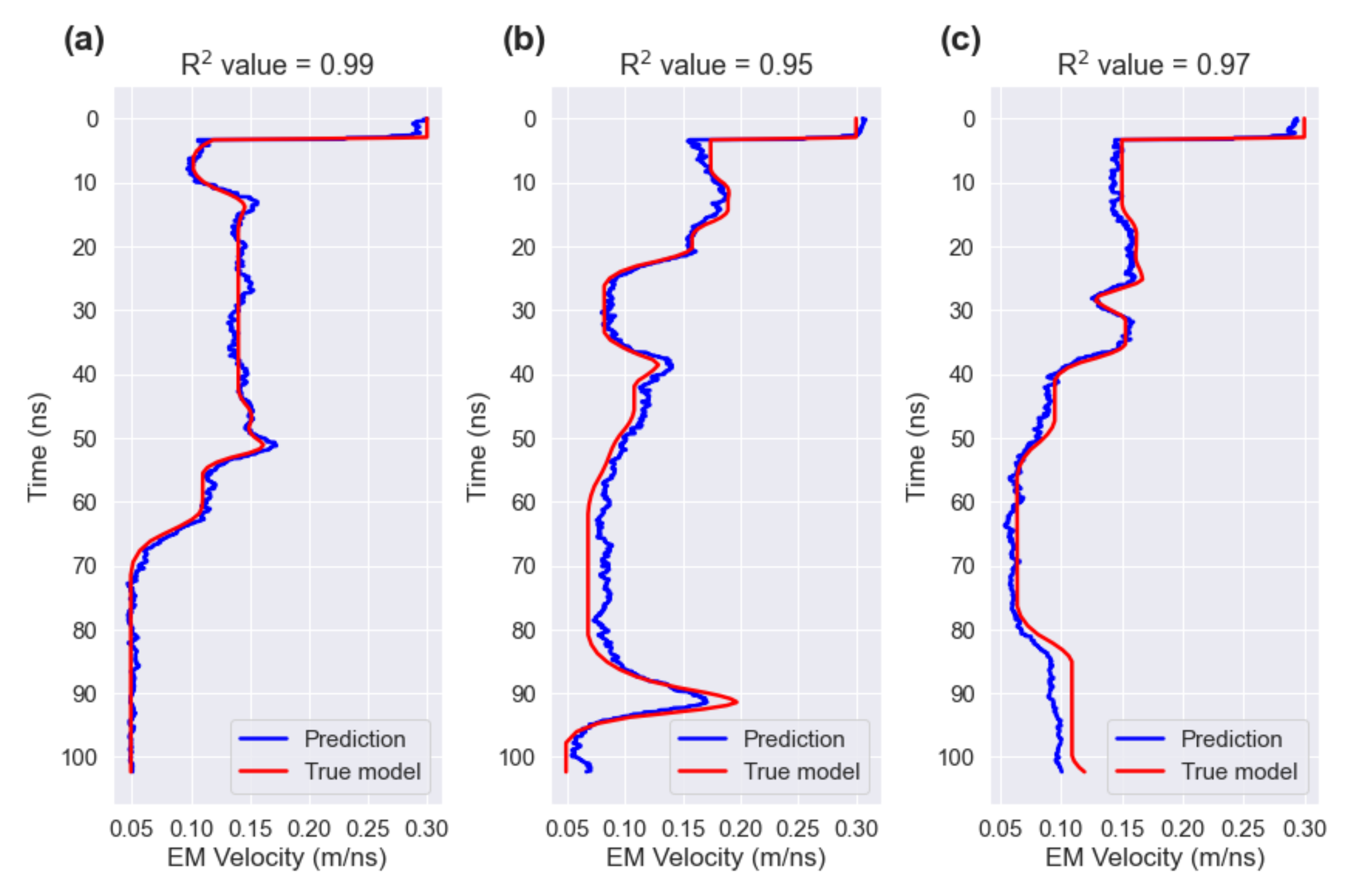
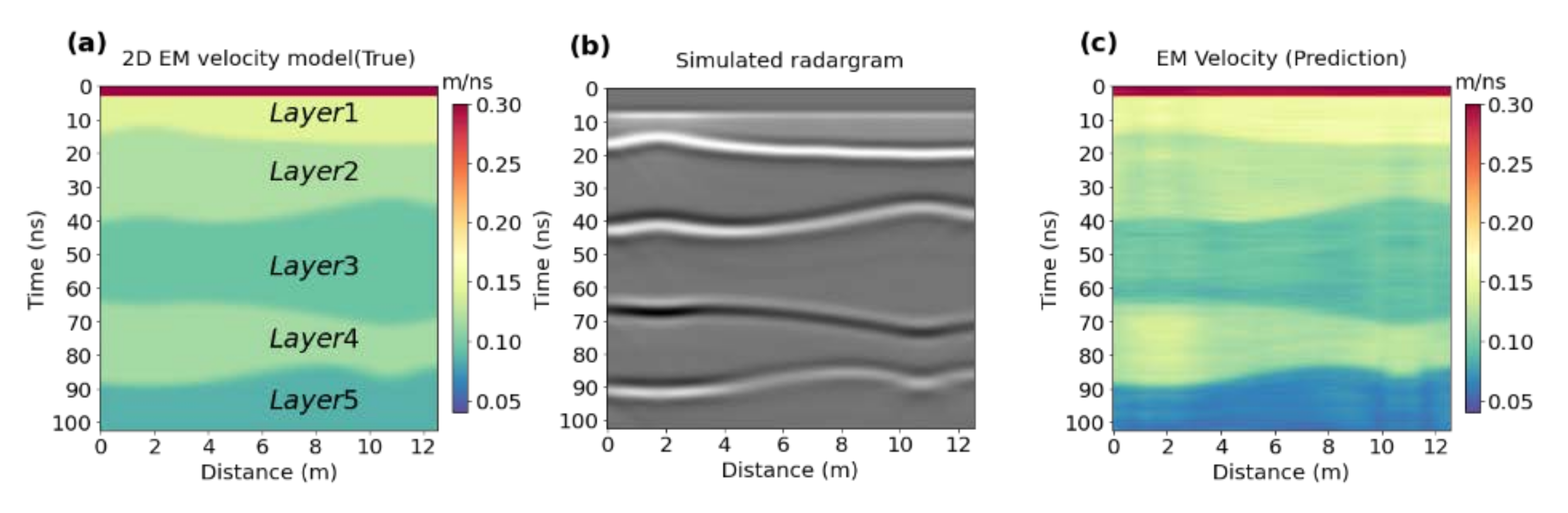
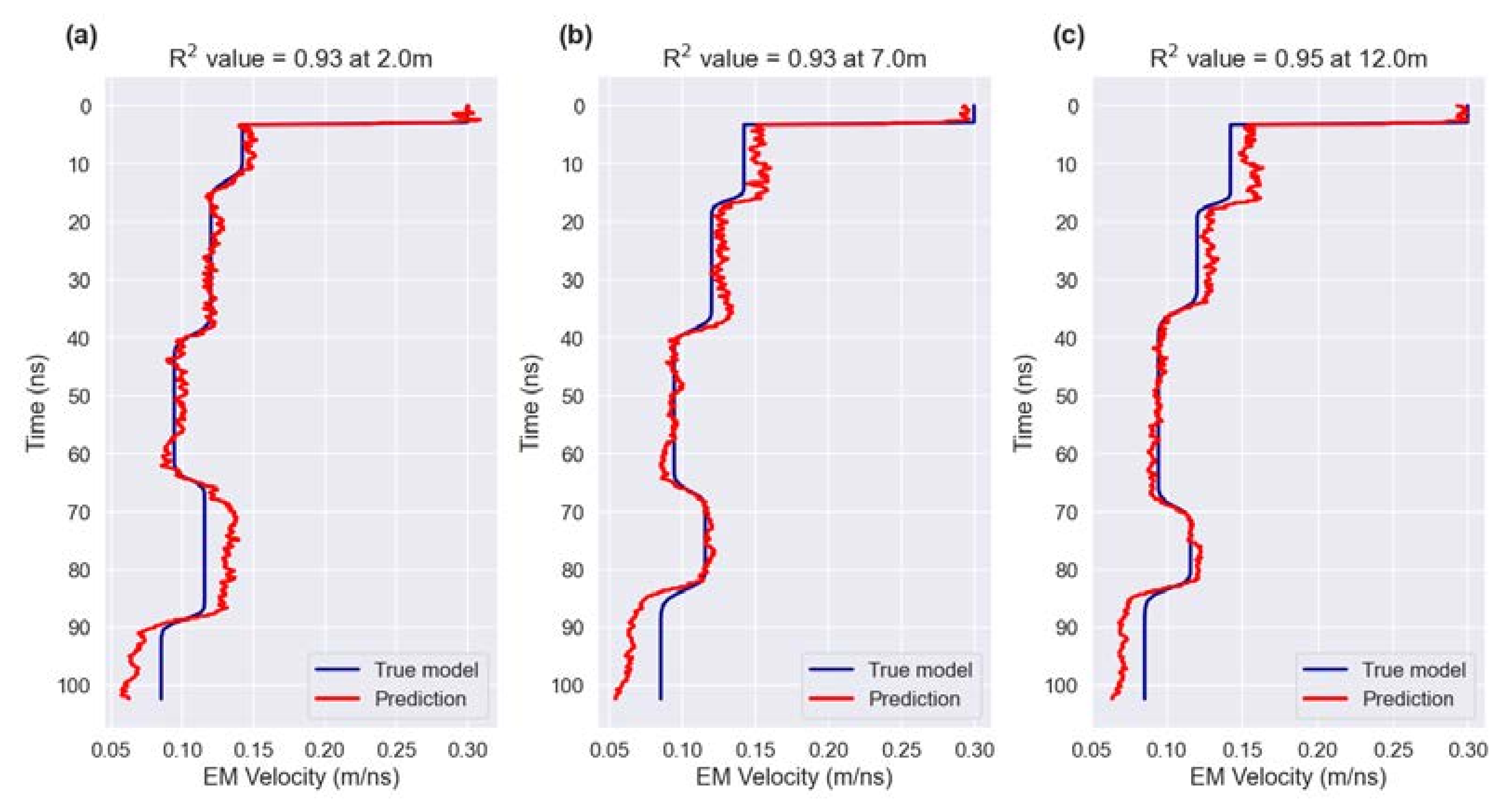
3.2. Application of DCNNs to 1D/2D Synthetic GPR Data
4. Field Examples
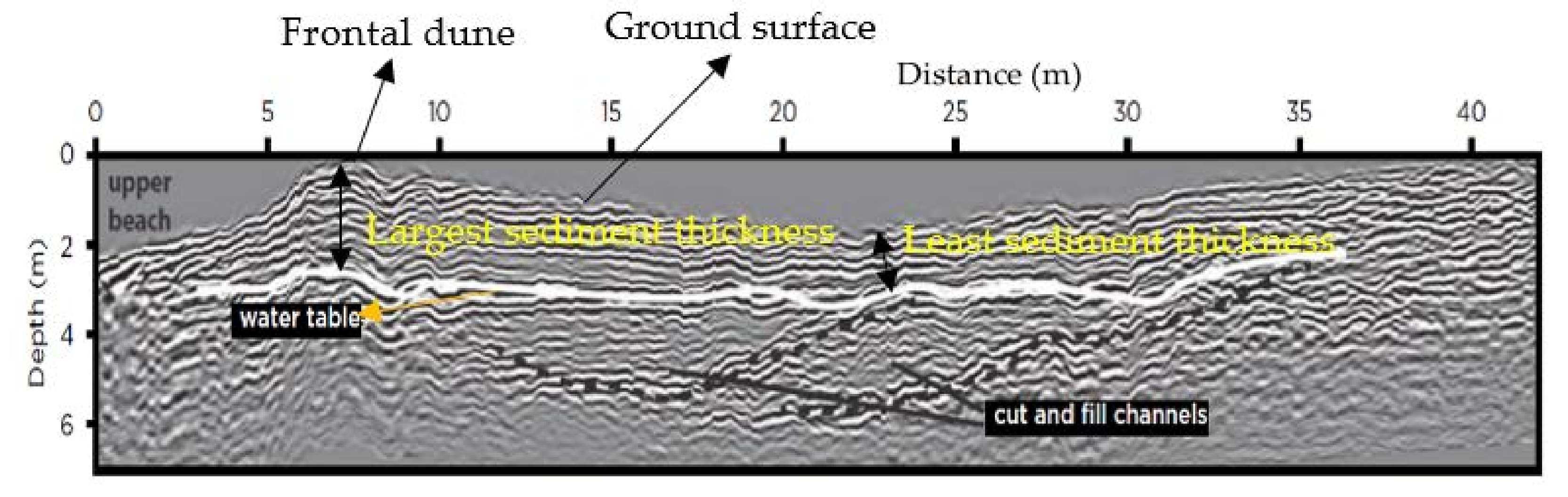
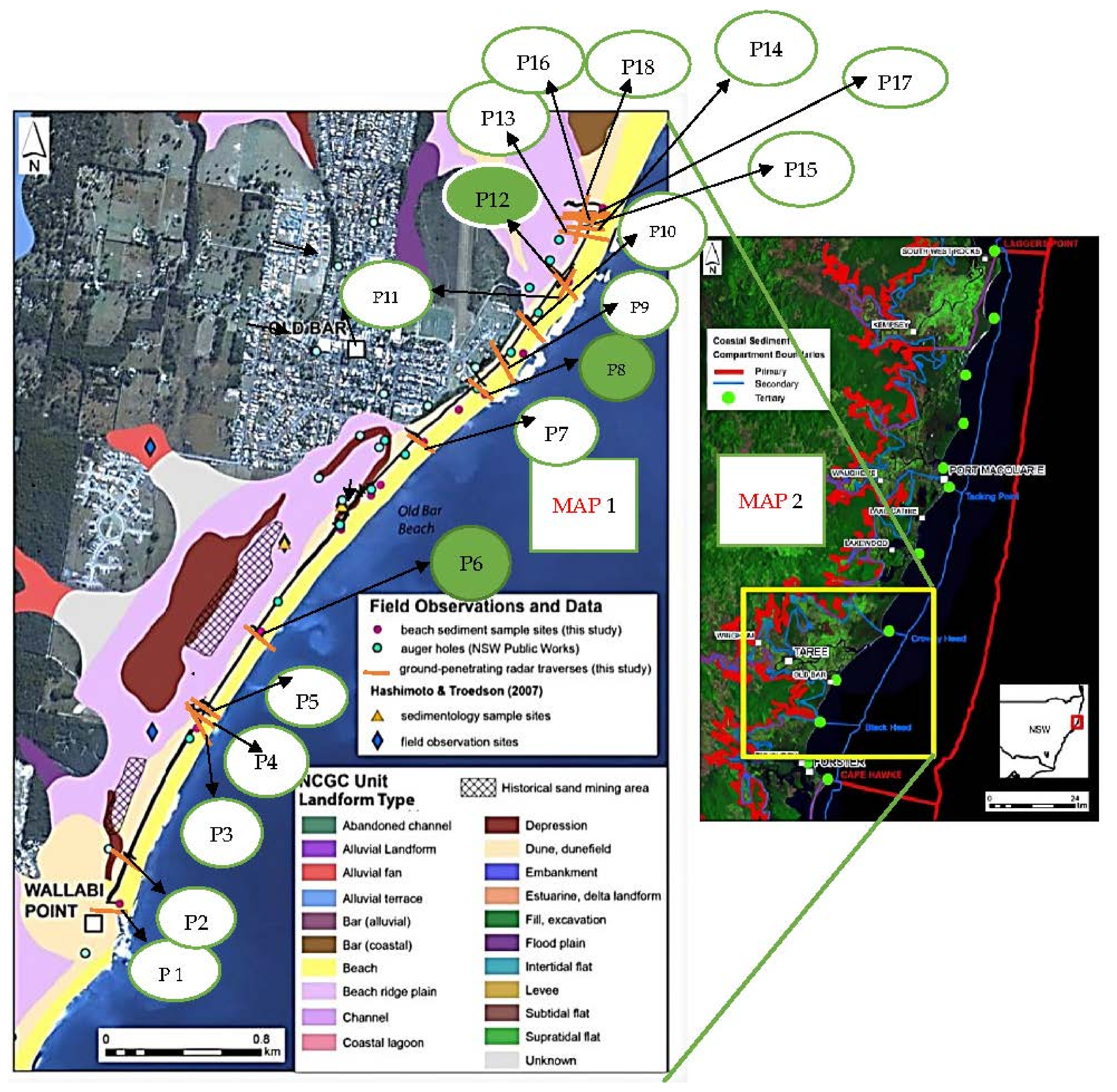
4.1. Description of the Field Data
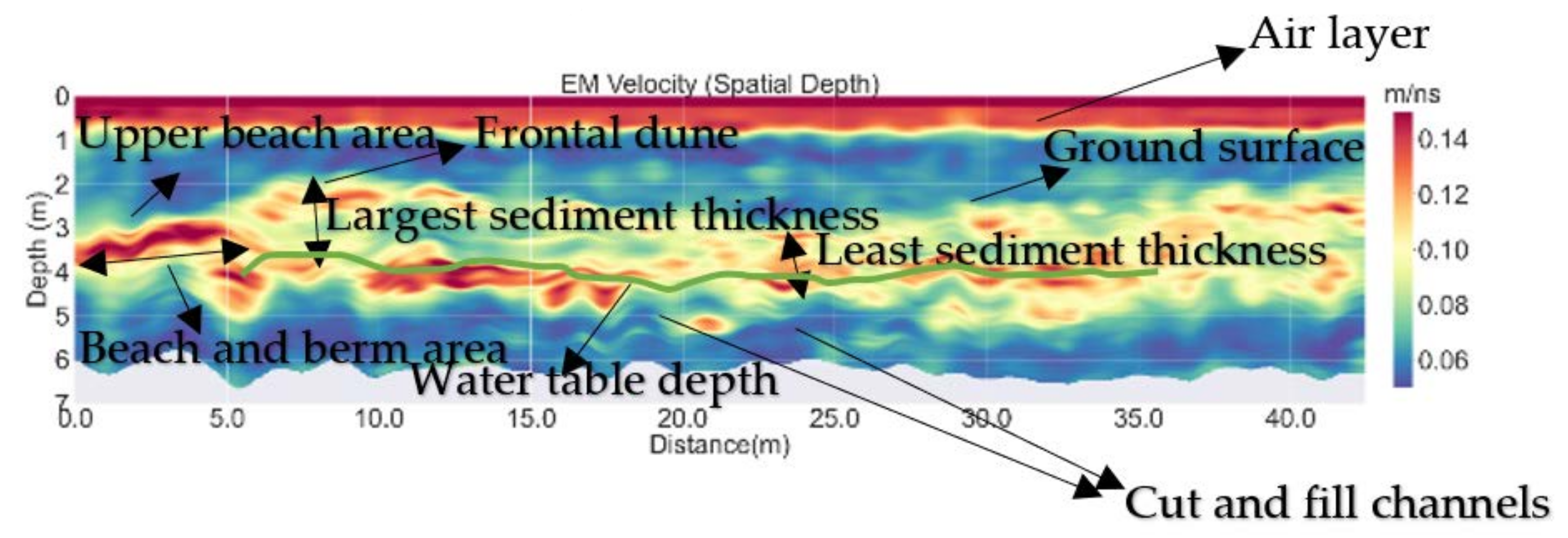
4.2. Coastal Sediment Compartment Boundaries and Landform Types
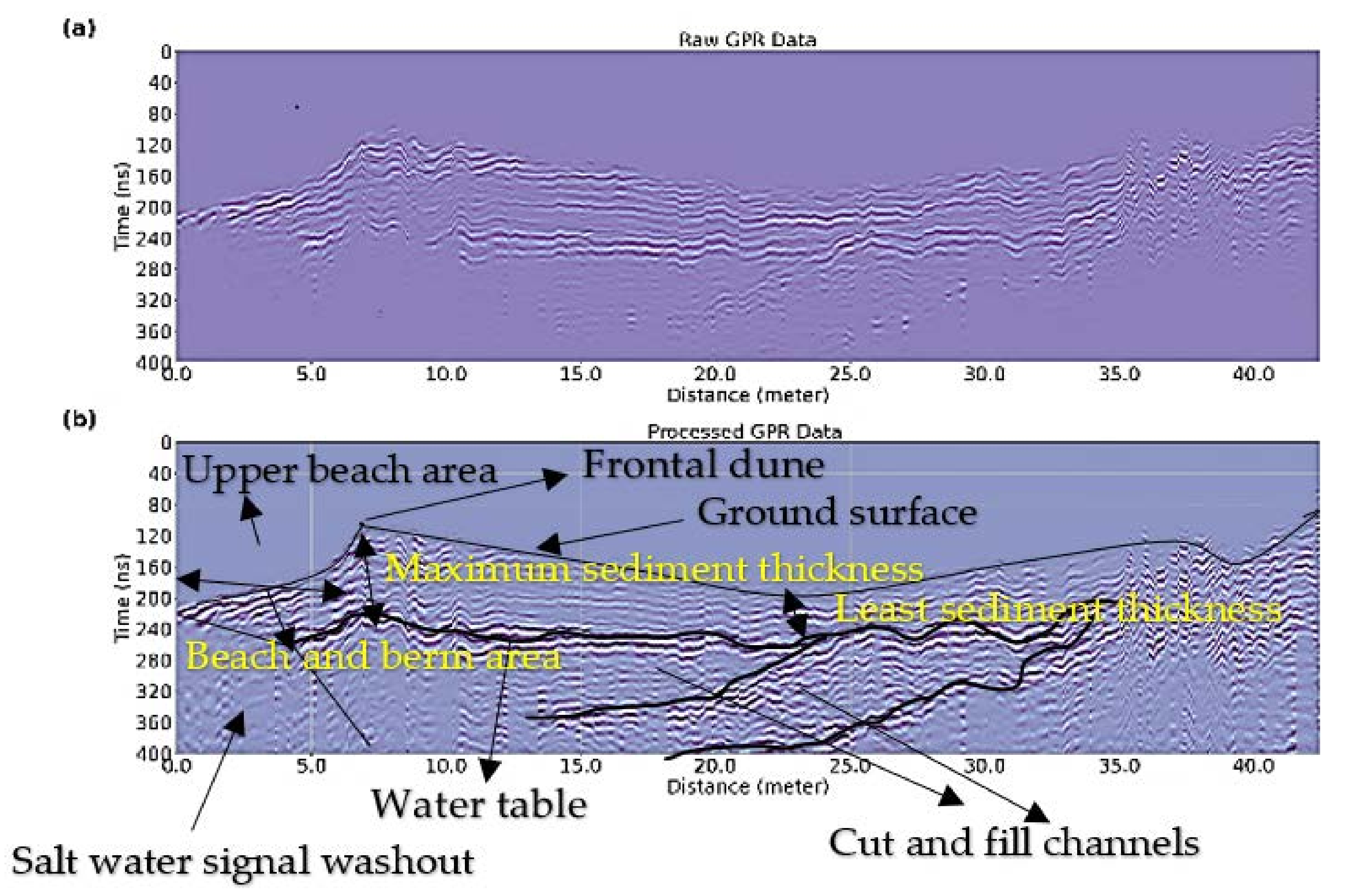
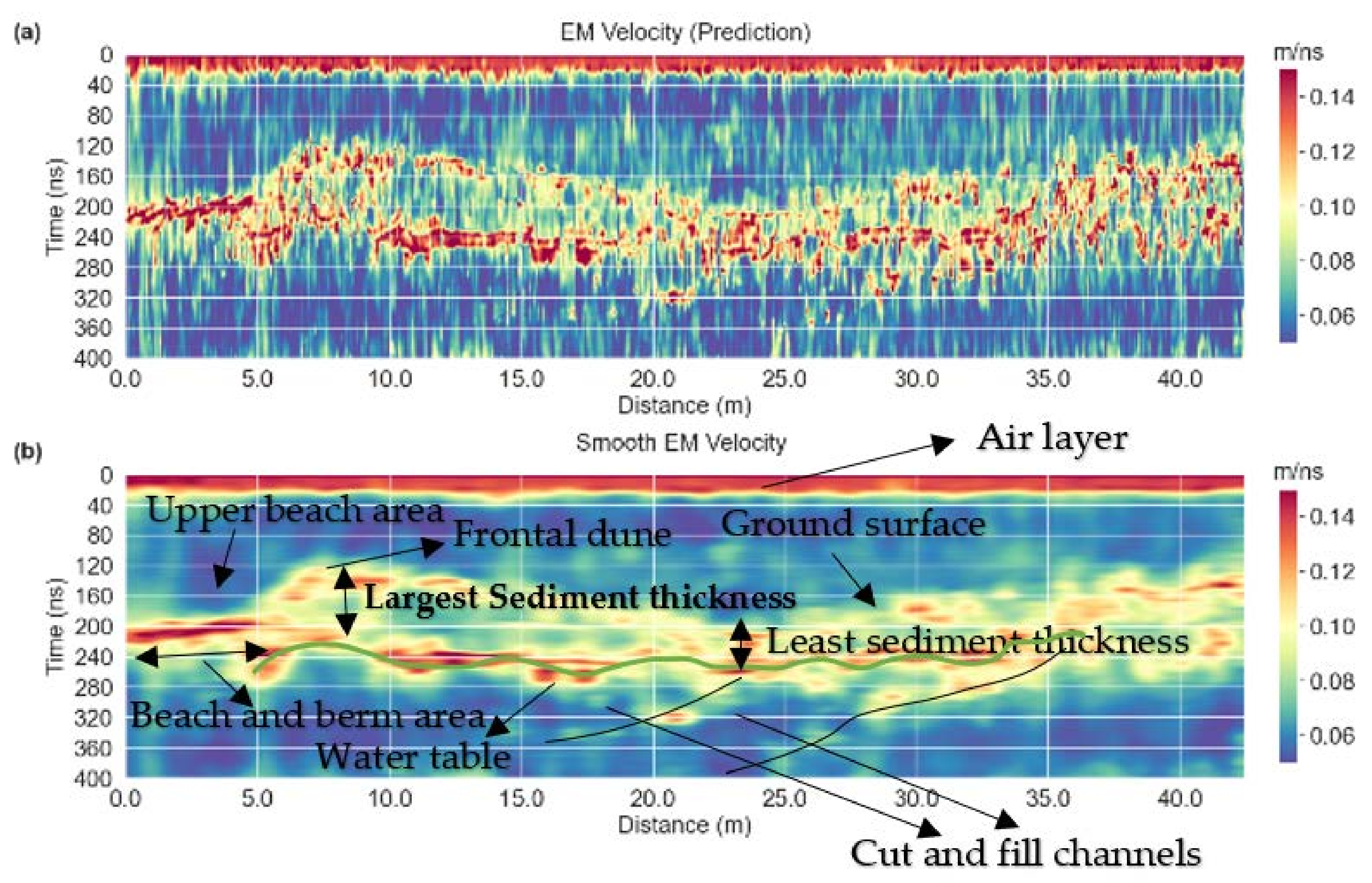
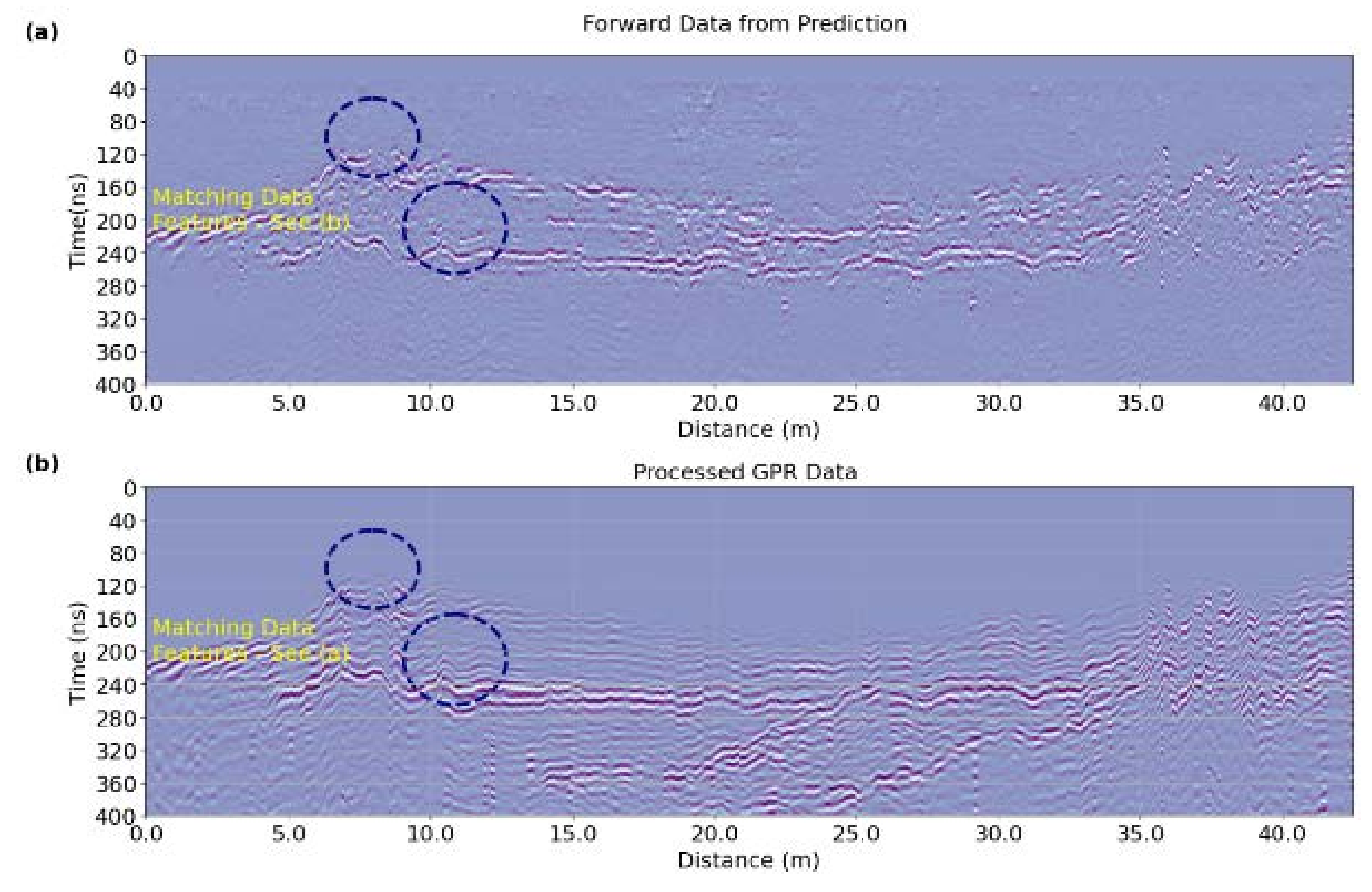
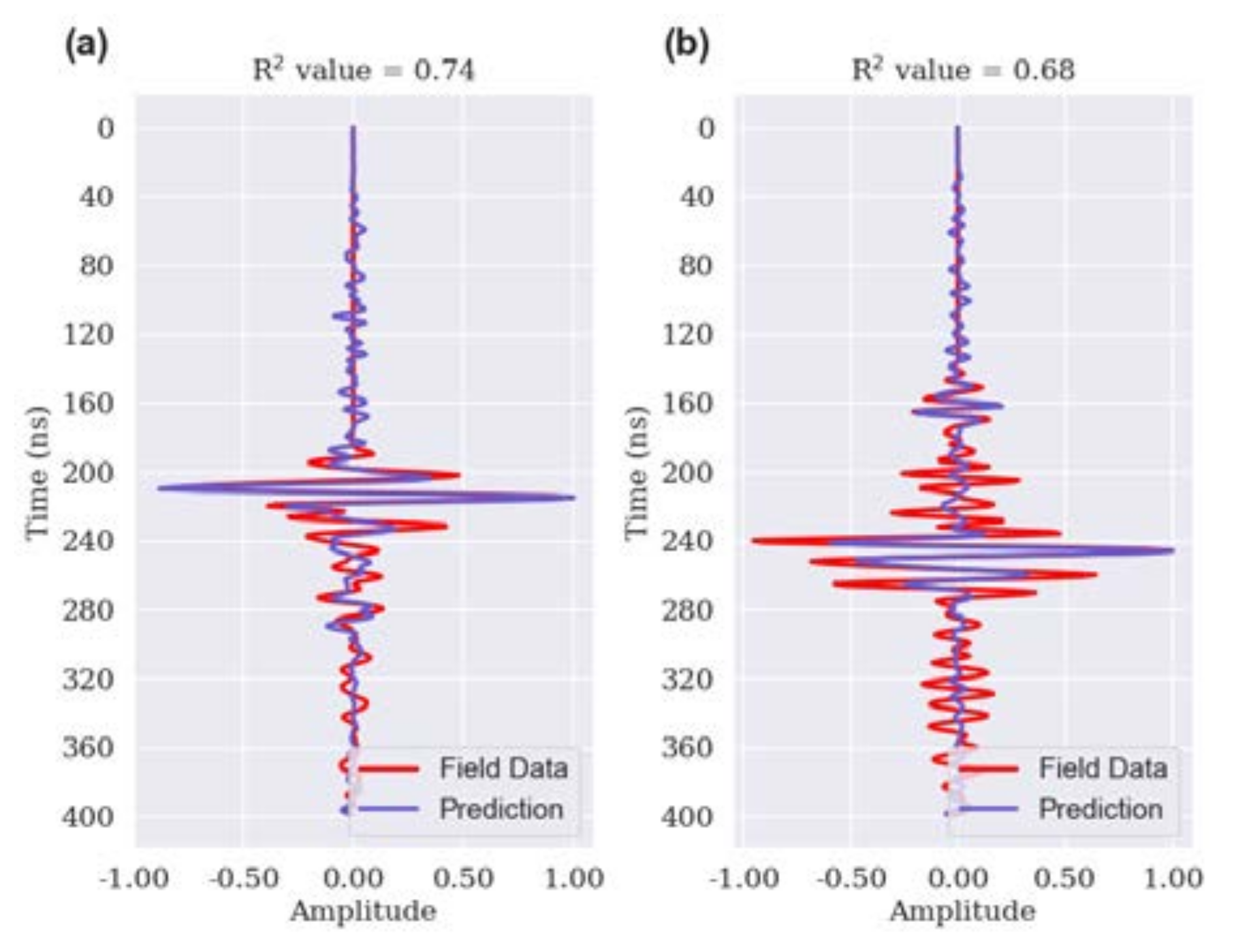
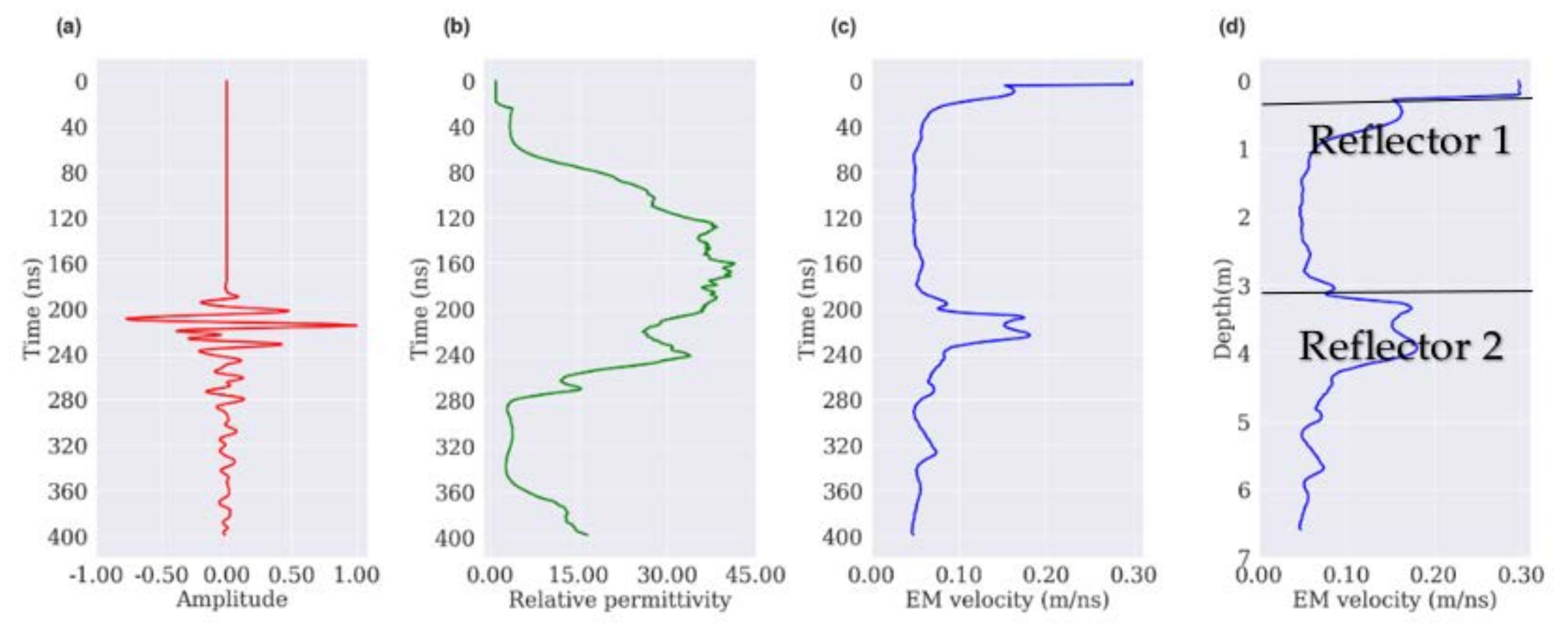
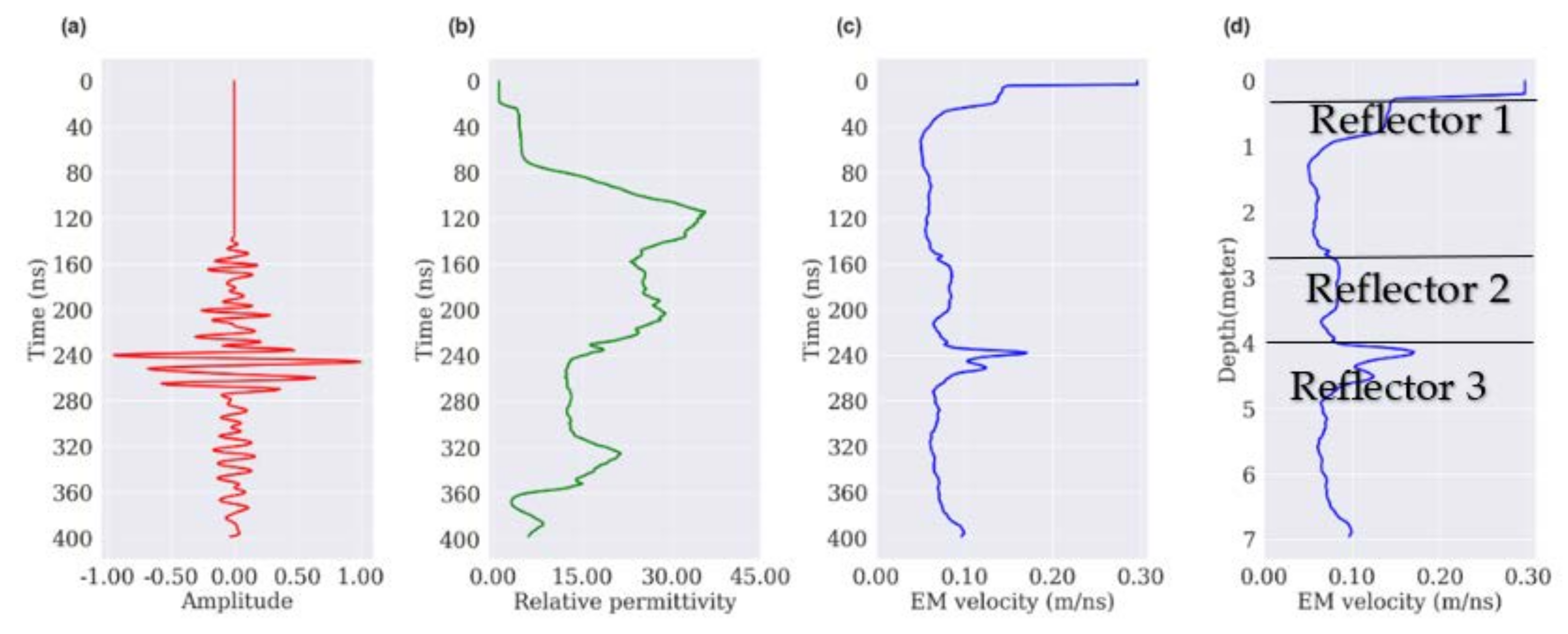
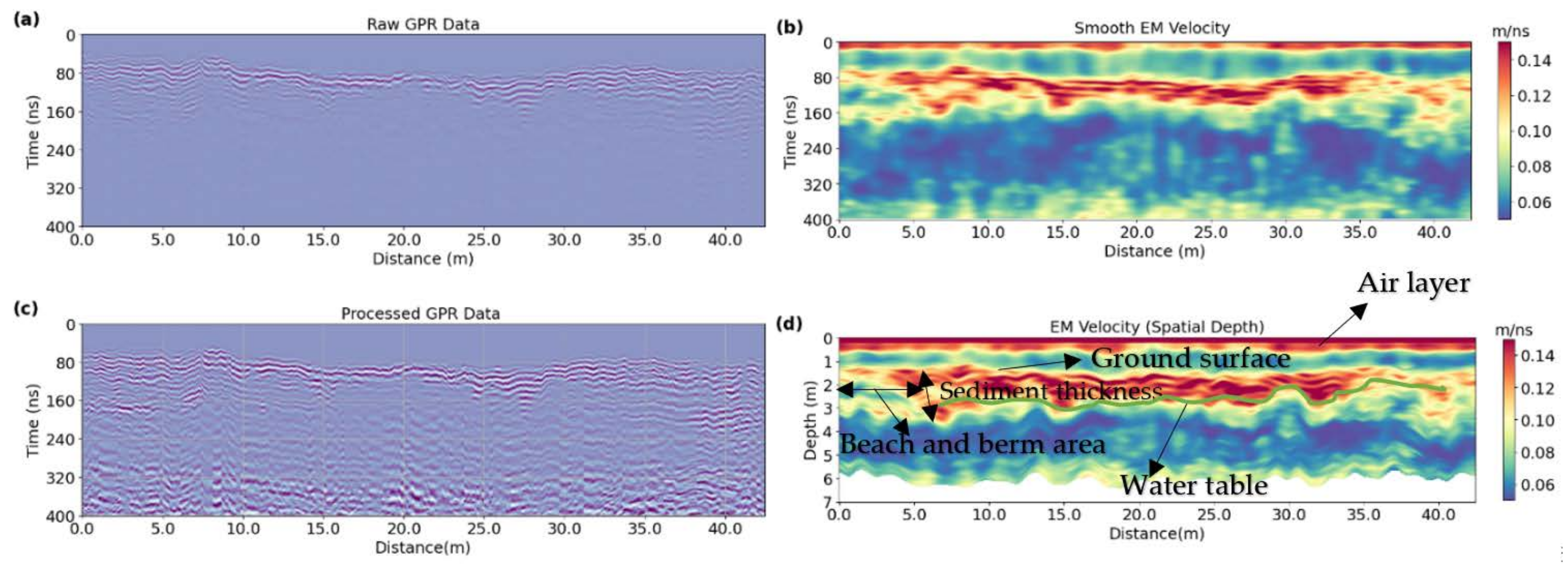
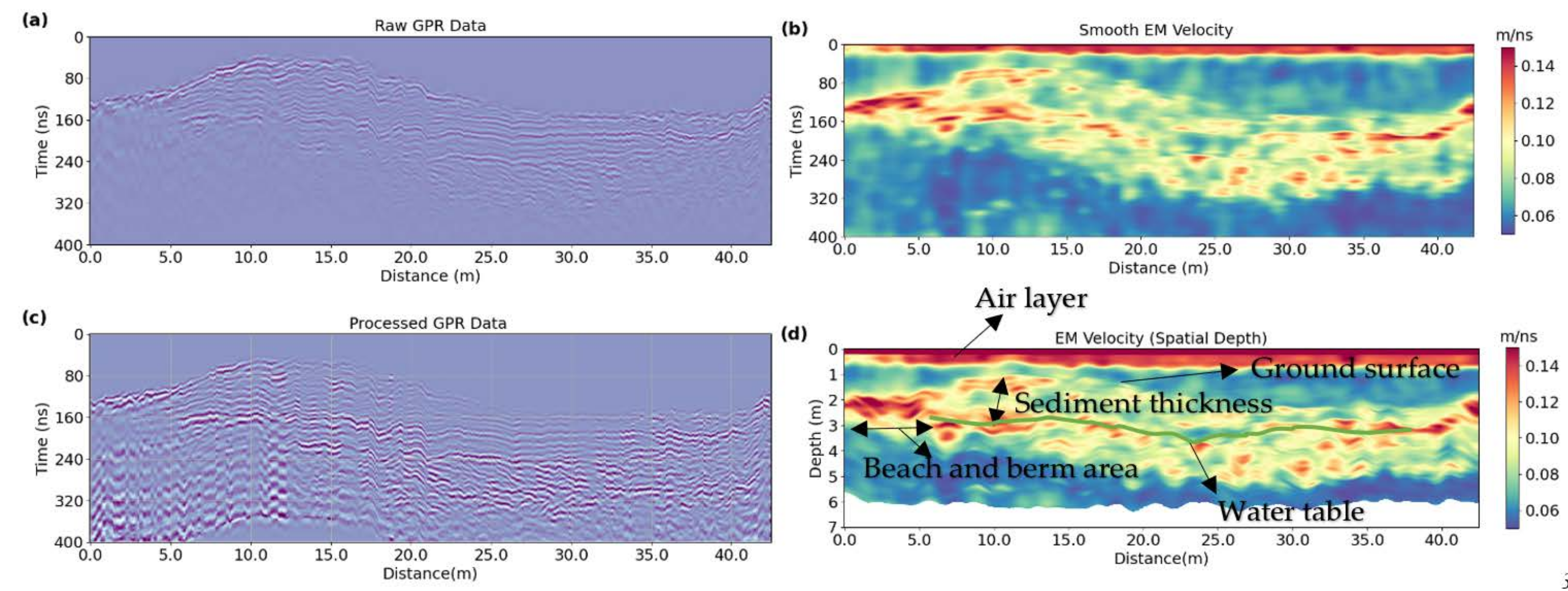
4.3. Application of DCNNs to Field GPR Data
- (i)
- firstly, 50,000 unique datasets were created;
- (ii)
- secondly, random Gaussian noise was added (approximately 15–85% of the standard deviation of traces amplitude) to unique GPR traces;
- (iii)
- thirdly, random time gain addition was performed with a range from e3ds to e20ds (where ds is the rate of sampling) to the unique GPR traces;
- (iv)
- fourthly, random time gain was added to GPR traces having Gaussian noise.
- (i)
- firstly, the direct waves were removed;
- (ii)
- secondly, the band-pass filter of frequency range 40–200 MHz was applied;
- (iii)
- thirdly, time gain addition was carried out;
- (iv)
- fourthly, max normalization was performed on GPR traces with respect to the maximum amplitude of each GPR trace.
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kinsela, M.A.; Hanslow, D.J. Coastal erosion risk assessment in New South Wales: Limitations and potential future directions. In Proceedings of the 22nd NSW Coastal Conference 2013, Port Macquarie, NSW, Australia, 12–15 November 2013. [Google Scholar] [CrossRef]
- Liew, M.; Xiao, M.; Jones, B.M.; Farquharson, L.M.; Romanovsky, V.E. Prevention and control measures for coastal erosion in northern high-latitude communities: A systematic review based on Alaskan case studies. Environ. Res. Lett. 2020, 15, 093002. [Google Scholar] [CrossRef]
- Staudt, F.; Gijsman, R.; Ganal, C.; Mielck, F.; Wolbring, J.; Hass, H.C.; Goseberg, N.; Schüttrumpf, H.; Schlurmann, T.; Schimmels, S. The sustainability of beach nourishments: A review of nourishment and environmental monitoring practice. J. Coast. Conserv. 2021, 25, 34. [Google Scholar] [CrossRef]
- Switzer, A.D.; Gouramanis, C.; Bristow, C.S.; Simms, A.R. Ground-penetrating radar (GPR) in coastal hazard studies. In Geological Records of Tsunamis and other Extreme Waves; Elsevier: Amsterdam, The Netherlands, 2020; pp. 143–168. [Google Scholar] [CrossRef]
- Singh, K.K.; Kulkarni, A.V.; Mishra, V.D. Estimation of glacier depth and moraine cover study using ground penetrating radar (GPR) in the Himalayan region. J. Indian Soc. Remote Sens. 2010, 38, 1–9. [Google Scholar] [CrossRef]
- Piro, S.; Campana, S. GPR investigation in different archaeological sites in Tuscany (Italy). Analysis and comparison of the obtained results. Near Surf. Geophys. 2012, 10, 47–56. [Google Scholar] [CrossRef]
- Liu, L.; Xie, X. GPR for geotechnical engineering. J. Geophys. Eng. 2013, 10, 030201. [Google Scholar] [CrossRef]
- Baker, G.S.; Jordan, T.E.; Pardy, J. An introduction to ground penetrating radar (GPR). Spec. Pap. Geol. Soc. Am. 2007, 432, 1. [Google Scholar] [CrossRef]
- Virieux, J.; Operto, S. An overview of full-waveform inversion in exploration geophysics. Geophysics 2009, 74, WCC1–WCC26. [Google Scholar] [CrossRef]
- Kim, Y.; Nakata, N. Geophysical inversion versus machine learning in inverse problems. Lead. Edge 2018, 37, 894–901. [Google Scholar] [CrossRef]
- Smirnov, E.A.; Timoshenko, D.M.; Andrianov, S.N. Comparison of regularization methods for imagenet classification with deep convolutional neural networks. Aasri Procedia 2014, 6, 89–94. [Google Scholar] [CrossRef]
- Xiong, Y.; Zuo, R.; Carranza, E.J.M. Mapping mineral prospectivity through big data analytics and a deep learning algorithm. Ore Geol. Rev. 2018, 102, 811–817. [Google Scholar] [CrossRef]
- Waldeland, A.U.; Jensen, A.C.; Gelius, L.J.; Solberg, A.H.S. Convolutional neural networks for automated seismic interpretation. Lead. Edge 2018, 37, 529–537. [Google Scholar] [CrossRef]
- Araya-Polo, M.; Dahlke, T.; Frogner, C.; Zhang, C.; Poggio, T.; Hohl, D. Automated fault detection without seismic processing. Lead. Edge 2017, 36, 208–214. [Google Scholar] [CrossRef]
- Li, S.; Liu, B.; Ren, Y.; Chen, Y.; Yang, S.; Wang, Y.; Jiang, P. Deep-learning inversion of seismic data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2135–2149. [Google Scholar] [CrossRef]
- Wu, Y.; Lin, Y. InversionNet: An efficient and accurate data-driven full waveform inversion. IEEE Trans. Comput. Imaging 2019, 6, 419–433. [Google Scholar] [CrossRef]
- Yang, F.; Ma, J. Deep−learning inversion: A next-generation seismic velocity model building method. Geophysics 2019, 84, R583–R599. [Google Scholar] [CrossRef]
- Bralich, J.; Reichman, D.; Collins, L.M.; Malof, J.M. Improving convolutional neural networks for buried target detection in ground penetrating radar using transfer learning via pretraining. In Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XXII; SPIE: Bellingham, WA, USA, 2017; Volume 10182, pp. 198–208. [Google Scholar] [CrossRef]
- Yue, Y.; Liu, H.; Meng, X.; Li, Y.; Du, Y. Generation of High-Precision Ground Penetrating Radar Images Using Improved Least Square Generative Adversarial Networks. Remote Sens. 2021, 13, 4590. [Google Scholar] [CrossRef]
- Chen, W.; Pourghasemi, H.R.; Kornejady, A.; Zhang, N. Landslide spatial modeling: Introducing new ensembles of ANN, MaxEnt, and SVM machine learning techniques. Geoderma 2017, 305, 314–327. [Google Scholar] [CrossRef]
- Elmahdy, S.; Ali, T.; Mohamed, M. Flash Flood Susceptibility modeling and magnitude index using machine learning and geohydrological models: A modified hybrid approach. Remote Sens. 2020, 12, 2695. [Google Scholar] [CrossRef]
- Mohajane, M.; Costache, R.; Karimi, F.; Pham, Q.B.; Essahlaoui, A.; Nguyen, H.; Laneve, G.; Oudija, F. Application of remote sensing and machine learning algorithms for forest fire mapping in a Mediterranean area. Ecol. Indic. 2021, 129, 107869. [Google Scholar] [CrossRef]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar] [CrossRef]
- Chen, L.-C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Howard, F.J.F. Ground Penetrating Radar (GPR) Data—Old Bar Beach Survey; Geoscience: Canberra, Australia, 2016. [Google Scholar]
- Irving, J.; Knight, R. Numerical modeling of ground-penetrating radar in 2-D using MATLAB. Comput. Geosci. 2006, 32, 1247–1258. [Google Scholar] [CrossRef]
- Kuzuoglu, M.; Mittra, R. Frequency dependence of the constitutive parameters of causal perfectly matched anisotropic absorbers. IEEE Microw. Guided Wave Lett. 1996, 6, 447–449. [Google Scholar] [CrossRef]
- Chen, Y.H.; Chew, W.C.; Oristaglio, M.L. Application of perfectly matched layers to the transient modeling of subsurface EM problems. Geophysics 1997, 62, 1730–1736. [Google Scholar] [CrossRef]
- Kitsunezaki, N. Electro-magnetic Simulation Based on the Integral Form of Maxwell’s Equations. In Recent Advances in Integral Equations; Intech Open: London, UK, 2018; p. 63. [Google Scholar] [CrossRef]
- Leong, Z.X.; Zhu, T. Direct velocity inversion of ground penetrating radar data using GPRNet. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021047. [Google Scholar] [CrossRef]
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted Boltzmann machines. In Proceedings of the 27th International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Sara, U.; Akter, M.; Uddin, M.S. Image quality assessment through FSIM, SSIM, MSE and PSNR—A comparative study. J. Comput. Commun. 2019, 7, 8–18. [Google Scholar] [CrossRef] [Green Version]
- Neal, A. Ground-penetrating radar and its use in sedimentology: Principles, problems and progress. Earth-Sci. Rev. 2004, 66, 261–330. [Google Scholar] [CrossRef]
- Gholamy, A.; Kreinovich, V. Why Ricker wavelets are successful in processing seismic data: Towards a theoretical explanation. In Proceedings of the 2014 IEEE Symposium on Computational Intelligence for Engineering Solutions (CIES), Orlando, FL, USA, 9–12 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 11–16. [Google Scholar] [CrossRef]
- Bradford, J.H.; Wu, Y. Instantaneous spectral analysis: Time-frequency mapping via wavelet matching with application to contaminated-site characterization by 3D GPR. Lead. Edge 2007, 26, 1018–1023. [Google Scholar] [CrossRef]
- Kumar, V.; Maiti, S. A nobel characterization of shape of pulse in GPR signal transmission. In Proceedings of the 2014 International Conference on Communication and Signal Processing, Melmaruvathur, India, 3–5 April 2014; pp. 944–947. [Google Scholar] [CrossRef]
- Rosen, P.S. Water table. In Beaches and Coastal Geology. Encyclopedia of Earth Sciences Series; Springer: New York, NY, USA, 1982. [Google Scholar] [CrossRef]
- McPherson, A.; Hazelwood, M.; Moore, D.; Owen, K.; Nichol, S.; Howard, F. The Australian Coastal Sediment Compartments Project: Methodology and Product Development. Record 2015/25; Geoscience: Canberra, Australia, 2015. [Google Scholar] [CrossRef]
- Harčarik, T.; Bocko, J.; Masláková, K. Frequency analysis of acoustic signal using the Fast Fourier Transformation in MATLAB. Procedia Eng. 2012, 48, 199–204. [Google Scholar] [CrossRef]
- Timms, W.; Acworth, R.I.; Berhane, D. Shallow groundwater dynamics in smectite dominated clay on the Liverpool Plains of New South Wales. Soil Res. 2001, 39, 203–218. [Google Scholar] [CrossRef]
- Merzlikin, D.; Fomel, S.; Sen, M.K. Least-squares path summation diffraction imaging using sparsity constraints. Geophysics 2019, 84, S187–S200. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | DeepLabv3+ Based GPRNet | DeepLabv3+ Based DCNNs (Having Same Values for Hyperparameters as GPRNet Has) | DeepLabv3+ Based Tuned DCNNs(Hyperparameters Tuned to Reduce Number of Trainable Parameters and Increase Convergence Rate) | |||
|---|---|---|---|---|---|---|
| Number of layers | 23 layers | 16 layers | 16 layers | |||
| Encoder (14 layers) | Decoder (9 layers) | Encoder (8 layers) | Decoder (8 layers | Encoder (8 layers) | Decoder (8 layers) | |
| 4 Convolutions + 4 Pooling + 4 Dilated Convolutions + 1 Merged Convolution + 1 Merged Up-sampling | 5 Deconvolutions + 4 Up-sampling | 4 Convolutions + 4 Pooling | 1 Deconvolutions + 3 Dilated Deconvolutions + 4 Up-sampling | 4 Convolutions + 4 Pooling | 1 Deconvolutions + 3 Dilated Deconvolutions + 4 Up-sampling | |
| Hyperparameters and optimizer | Filter size = 20, Initial number of filters = 16, Learning rate = 0.0001, Filter size dilation rate = 6, 12, 18, Optimizer = Adam | Filter size = 20, Initial number of filters = 16, Learning rate = 0.0001, Filter size dilation rate = 6, 12, 18, Optimizer = Adam | Filter size = 12, Initial number of filters = 12, Learning rate = 0.0001, Filter size dilation rate = 3, 6, 9, Optimizer = Adam | |||
| Number of trainable parameters | 1,392,585 | 4,765,961 | 1,287,769 | |||
| Convergence epochs (Iterations) | 100 | 151 | 71 | |||
| Loss reduction (MSE) | 0.0000875 | 0.000075 | 0.000095 | |||
| Accuracy (R2) | 1D Case | 2D Case | 1D Case | 2D Case | 1D Case | 2D Case |
| 99% | 98% | 99% | 99% | 99% | 95% | |
| Training duration | 3 h | 4.5 h | 1.5 h | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, A.; Singh, U.K.; Pradhan, B. Ground Penetrating Radar in Coastal Hazard Mitigation Studies Using Deep Convolutional Neural Networks. Remote Sens. 2022, 14, 4899. https://doi.org/10.3390/rs14194899
Kumar A, Singh UK, Pradhan B. Ground Penetrating Radar in Coastal Hazard Mitigation Studies Using Deep Convolutional Neural Networks. Remote Sensing. 2022; 14(19):4899. https://doi.org/10.3390/rs14194899
Chicago/Turabian StyleKumar, Abhishek, Upendra Kumar Singh, and Biswajeet Pradhan. 2022. "Ground Penetrating Radar in Coastal Hazard Mitigation Studies Using Deep Convolutional Neural Networks" Remote Sensing 14, no. 19: 4899. https://doi.org/10.3390/rs14194899
APA StyleKumar, A., Singh, U. K., & Pradhan, B. (2022). Ground Penetrating Radar in Coastal Hazard Mitigation Studies Using Deep Convolutional Neural Networks. Remote Sensing, 14(19), 4899. https://doi.org/10.3390/rs14194899