






Automated Health Estimation of Capsicum annuum L. Crops by Means of Deep Learning and RGB Aerial Images
 , , , and
, , , and
Abstract
:
1. Introduction
2. Materials and Methods
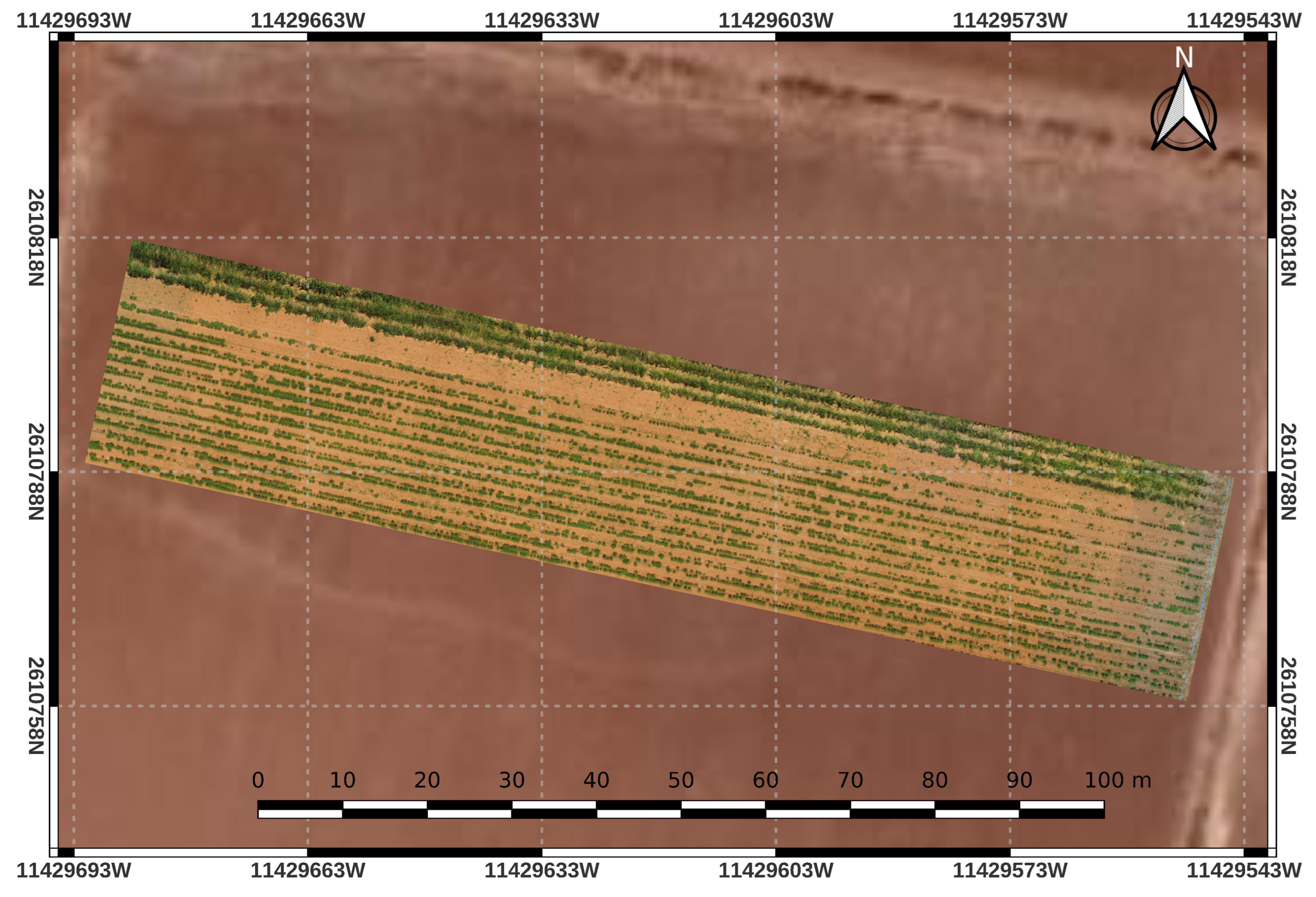
2.1. Study Area
2.2. Data Collection and Prepossessing
2.3. Hardware and Software
2.4. Data Augmentation and Class Balance
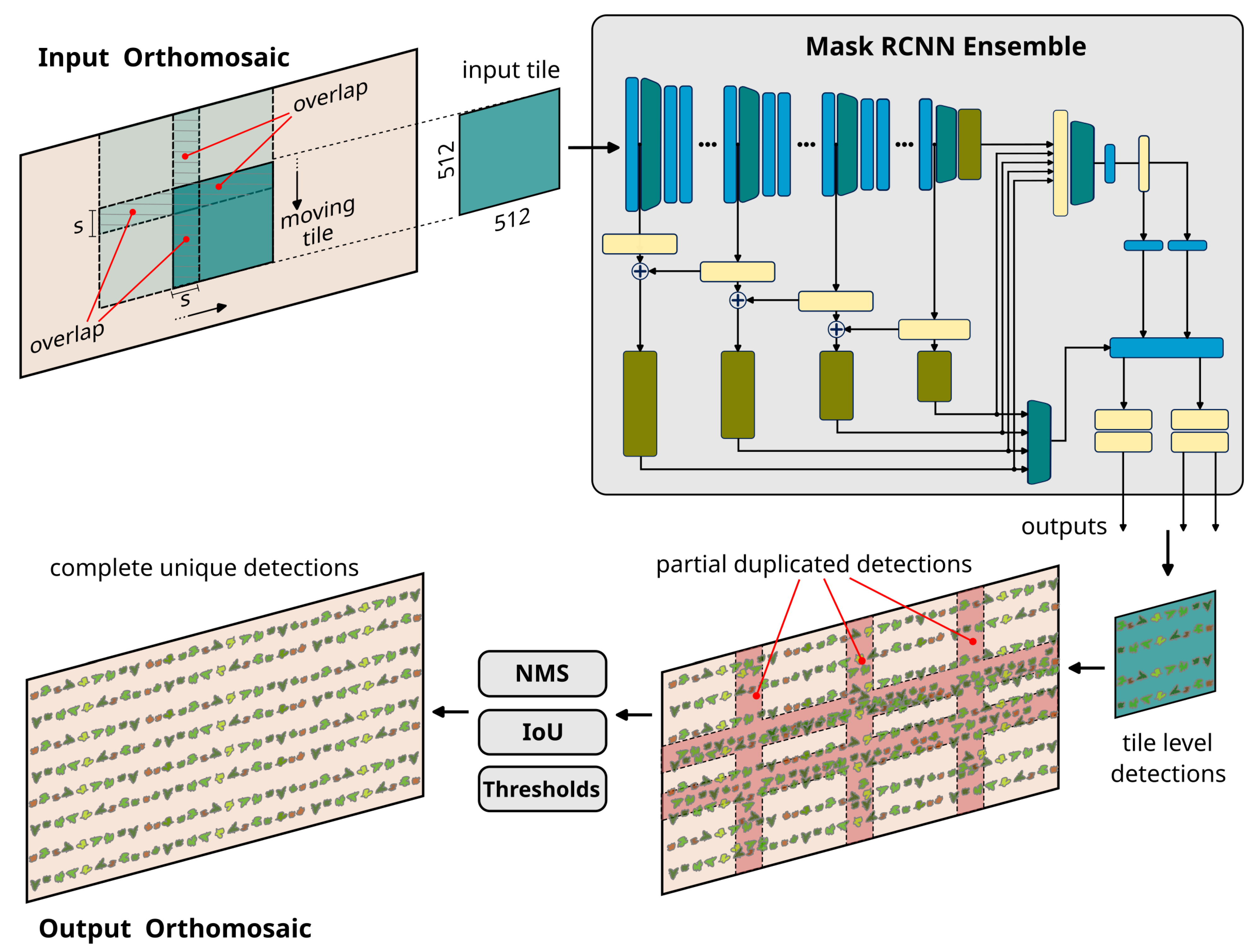
2.5. Deep Learning Ensemble Model
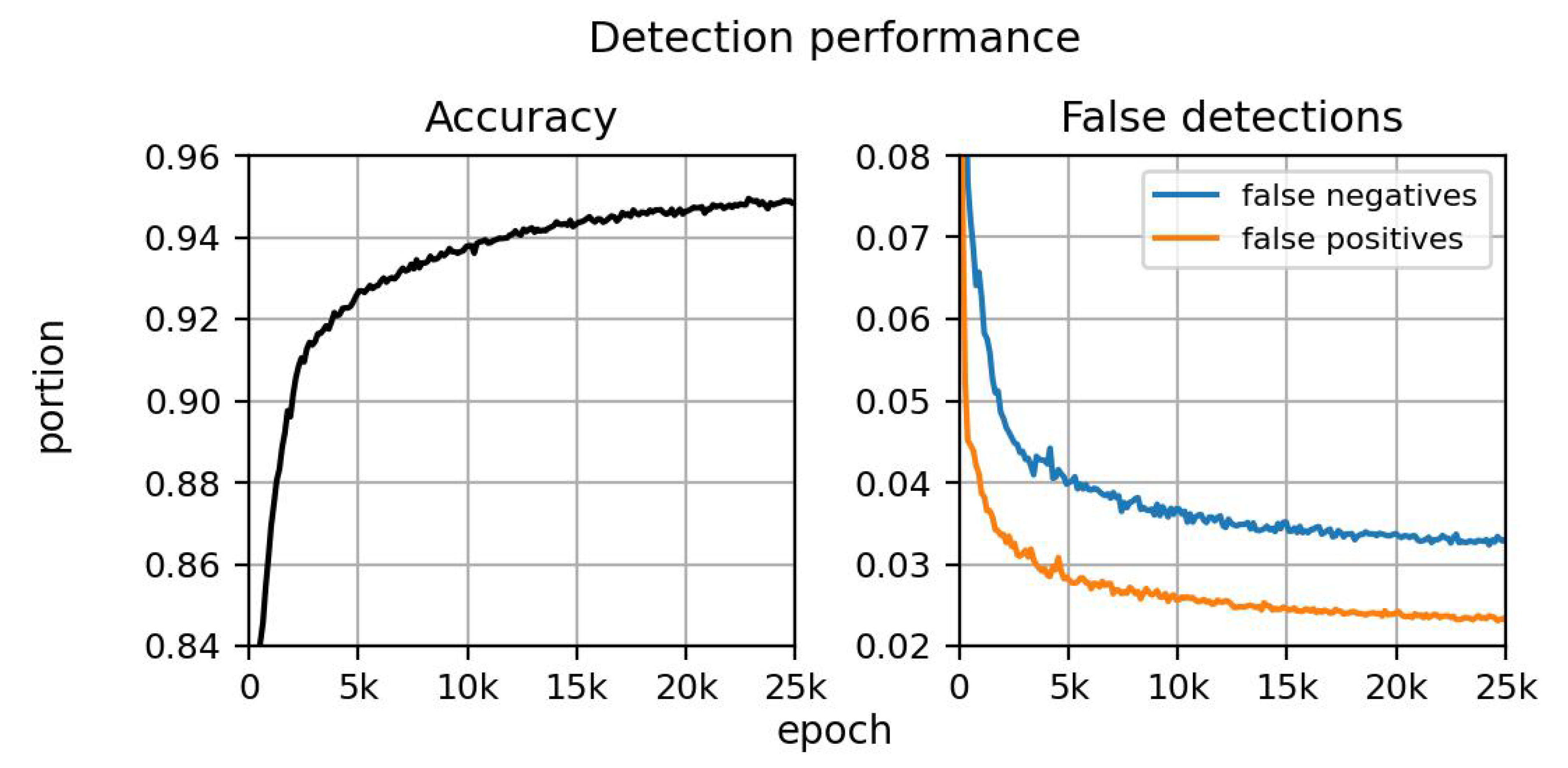
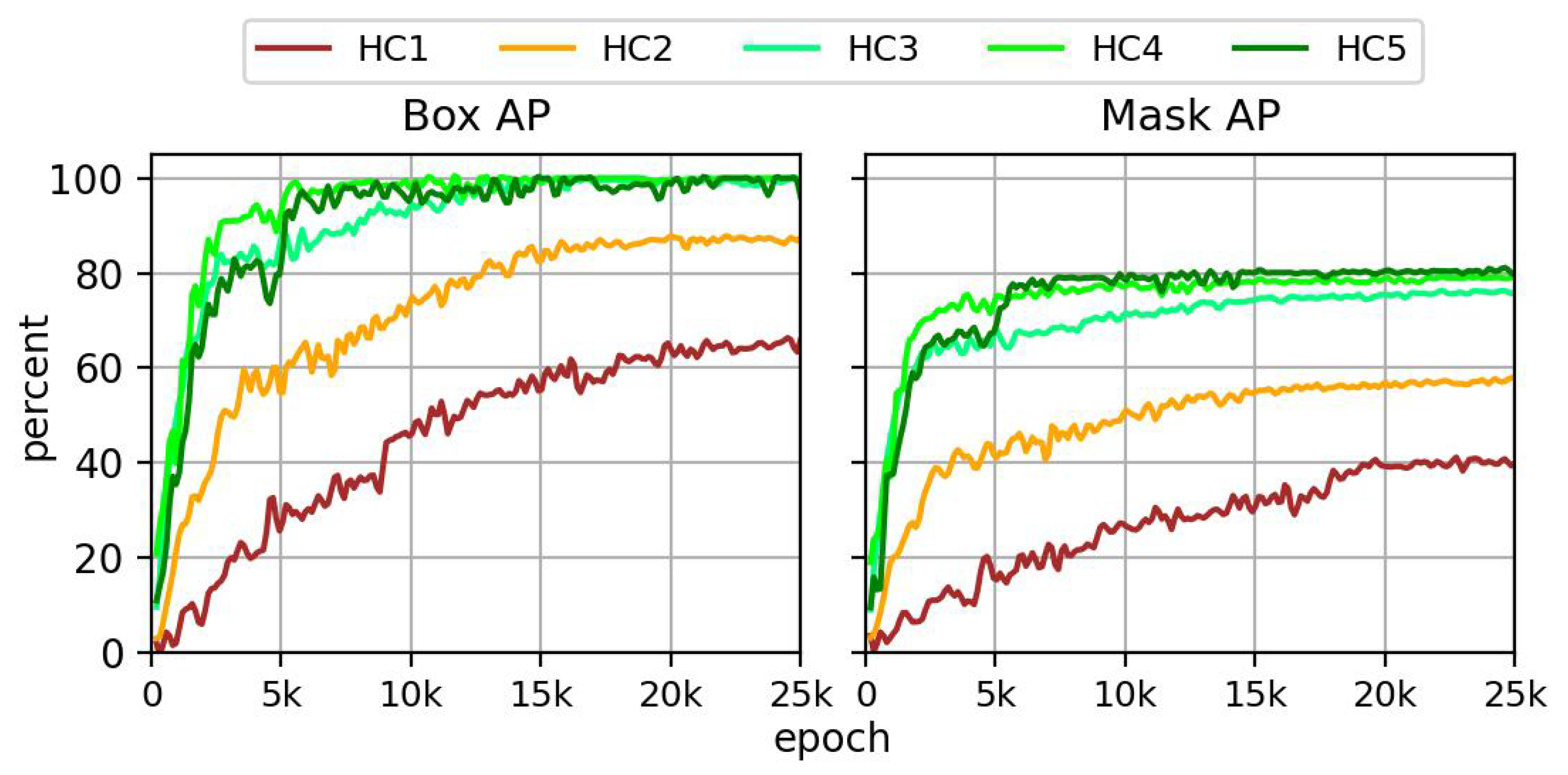
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AP | Average precision. |
| DL | Deep learning. |
| EXIF | Exchangeable image file format. |
| FPN | Feature pyramid network. |
| GIS | Geographic information system. |
| GRE | Green. |
| I2C | Inter integrated circuit. |
| IoU | Intersection over union. |
| LSMSS | Large scale mean shift segmentation. |
| NDVI | Normalized differential vegetation index. |
| NIR | Near infrared. |
| NMS | Non maximum suppression. |
| NN | Neural network. |
| OBIA | Object-based image analysis. |
| OTG | On the go. |
| RCNN | Region-based neural network. |
| RED | Red. |
| REG | Red edge. |
| ROI | Region of interest. |
| RPN | Region proposal network. |
| SAD | Standard area diagrams. |
| SGD | Stochastic gradient descent. |
| USB | Universal serial bus. |
References
- Moreno-Pérez, E.D.C.; Avendaño-Arrazate, C.H.; Mora-Aguilar, R.; Cadena-Iñiguez, J.; Aguilar-Rincón, V.H.; Aguirre-Medina, J.F. Diversidad morfológica en colectas de chile guajillo (Capsicum annuum L.) del centro-norte de México. Rev. Chapingo. Ser. Hortic. 2011, 17, 23–30. [Google Scholar] [CrossRef]
- Del Ponte, E.M.; Pethybridge, S.J.; Bock, C.H.; Michereff, S.J.; Machado, F.J.; Spolti, P. Standard area diagrams for aiding severity estimation: Scientometrics, pathosystems, and methodological trends in the last 25 years. Phytopathology 2017, 107, 1161–1174. [Google Scholar] [CrossRef] [Green Version]
- Bock, C.H.; Chiang, K.S.; Del Ponte, E.M. Plant disease severity estimated visually: A century of research, best practices, and opportunities for improving methods and practices to maximize accuracy. Trop. Plant Pathol. 2022, 47, 25–42. [Google Scholar] [CrossRef]
- Ahmadi, P.; Mansor, S.; Farjad, B.; Ghaderpour, E. Unmanned Aerial Vehicle (UAV)-based remote sensing for early-stage detection of Ganoderma. Remote Sens. 2022, 14, 1239. [Google Scholar] [CrossRef]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.L. Potential and constraints of Unmanned Aerial Vehicle technology for the characterization of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Ghulam, A.; Sidike, P.; Hartling, S.; Maimaitiyiming, M.; Peterson, K.; Shavers, E.; Fishman, J.; Peterson, J.; Kadam, S.; et al. Unmanned Aerial System (UAS)-based phenotyping of soybean using multi-sensor data fusion and extreme learning machine. ISPRS J. Photogramm. Remote Sens. 2017, 134, 43–58. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Ammad Uddin, M.; Mansour, A.; Le Jeune, D.; Ayaz, M.; Aggoune, E.H.M. UAV-assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 2018, 18, 555. [Google Scholar] [CrossRef] [Green Version]
- Singh, N.; Gupta, N. Decision-Making in Integrated Pest Management and Bayesian Network. Int. J. Comput. Sci. Inf. Technol. 2017, 9, 31–37. [Google Scholar] [CrossRef]
- Hamada, M.A.; Kanat, Y.; Abiche, A.E. Multi-spectral image segmentation based on the K-means clustering. Int. J. Innov. Technol. Explor. Eng. 2019, 9, 1016–1019. [Google Scholar] [CrossRef]
- Das, S.; Christopher, J.; Apan, A.; Choudhury, M.R.; Chapman, S.; Menzies, N.W.; Dang, Y.P. UAV-Thermal imaging and agglomerative hierarchical clustering techniques to evaluate and rank physiological performance of wheat genotypes on sodic soil. ISPRS J. Photogramm. Remote Sens. 2021, 173, 221–237. [Google Scholar] [CrossRef]
- Rajeswari, S.; Suthendran, K. C5.0: Advanced Decision Tree (ADT) classification model for agricultural data analysis on cloud. Comput. Electron. Agric. 2019, 156, 530–539. [Google Scholar] [CrossRef]
- Tariq, A.; Yan, J.; Gagnon, A.S.; Riaz Khan, M.; Mumtaz, F. Mapping of cropland, cropping patterns and crop types by combining optical remote sensing images with decision tree classifier and random forest. Geo-Spat. Inf. Sci. 2022, 1–19. [Google Scholar] [CrossRef]
- Muliady, M.; Lim, T.S.; Koo, V.C.; Patra, S. Classification of rice plant nitrogen nutrient status using k-nearest neighbors (k-NN) with light intensity data. Indones. J. Electr. Eng. Comput. Sci. 2021, 22, 179–186. [Google Scholar] [CrossRef]
- Dharmaraj, V.; Vijayanand, C. Artificial intelligence (AI) in agriculture. Int. J. Curr. Microbiol. Appl. Sci. 2018, 7, 2122–2128. [Google Scholar] [CrossRef]
- Kujawa, S.; Niedbała, G. Artificial neural networks in agriculture. Agriculture 2021, 11, 497. [Google Scholar] [CrossRef]
- Song, Y.; Teng, G.; Yuan, Y.; Liu, T.; Sun, Z. Assessment of wheat chlorophyll content by the multiple linear regression of leaf image features. Inf. Process. Agric. 2021, 8, 232–243. [Google Scholar] [CrossRef]
- Sahoo, R.N. Sensor-Based Monitoring of Soil and Crop Health for Enhancing Input Use Efficiency. In Food, Energy, and Water Nexus; Springer: Berlin/Heidelberg, Germany, 2022; pp. 129–147. [Google Scholar]
- Banerjee, I.; Madhumathy, P. IoT Based Agricultural Business Model for Estimating Crop Health Management to Reduce Farmer Distress Using SVM and Machine Learning. In Internet of Things and Analytics for Agriculture; Springer: Berlin/Heidelberg, Germany, 2022; Volume 3, pp. 165–183. [Google Scholar]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Türkoğlu, M.; Hanbay, D. Plant disease and pest detection using deep learning-based features. Turk. J. Electr. Eng. Comput. Sci. 2019, 27, 1636–1651. [Google Scholar] [CrossRef]
- Chen, C.J.; Huang, Y.Y.; Li, Y.S.; Chang, C.Y.; Huang, Y.M. An AIoT based smart agricultural system for pests detection. IEEE Access 2020, 8, 180750–180761. [Google Scholar] [CrossRef]
- Tetila, E.C.; Machado, B.B.; Astolfi, G.; de Souza Belete, N.A.; Amorim, W.P.; Roel, A.R.; Pistori, H. Detection and classification of soybean pests using deep learning with UAV images. Comput. Electron. Agric. 2020, 179, 105836. [Google Scholar] [CrossRef]
- Chen, C.J.; Huang, Y.Y.; Li, Y.S.; Chen, Y.C.; Chang, C.Y.; Huang, Y.M. Identification of fruit tree pests with deep learning on embedded drone to achieve accurate pesticide spraying. IEEE Access 2021, 9, 21986–21997. [Google Scholar] [CrossRef]
- Feng, J.; Sun, Y.; Zhang, K.; Zhao, Y.; Ren, Y.; Chen, Y.; Zhuang, H.; Chen, S. Autonomous Detection of Spodoptera frugiperda by Feeding Symptoms Directly from UAV RGB Imagery. Appl. Sci. 2022, 12, 2592. [Google Scholar] [CrossRef]
- Bah, M.D.; Hafiane, A.; Canals, R. Deep learning with unsupervised data labeling for weed detection in line crops in UAV images. Remote Sens. 2018, 10, 1690. [Google Scholar] [CrossRef] [Green Version]
- Etienne, A.; Saraswat, D. Machine learning approaches to automate weed detection by UAV based sensors. Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping IV. Int. Soc. Opt. Photonics 2019, 11008, 110080R. [Google Scholar]
- Veeranampalayam Sivakumar, A.N.; Li, J.; Scott, S.; Psota, E.; J Jhala, A.; Luck, J.D.; Shi, Y. Comparison of object detection and patch-based classification deep learning models on mid-to late-season weed detection in UAV imagery. Remote Sens. 2020, 12, 2136. [Google Scholar] [CrossRef]
- Khan, S.; Tufail, M.; Khan, M.T.; Khan, Z.A.; Anwar, S. Deep learning-based identification system of weeds and crops in strawberry and pea fields for a precision agriculture sprayer. Precis. Agric. 2021, 22, 1711–1727. [Google Scholar] [CrossRef]
- Beeharry, Y.; Bassoo, V. Drone-Based Weed Detection Architectures Using Deep Learning Algorithms and Real-Time Analytics. In Computer Vision and Machine Learning in Agriculture; Springer: Berlin/Heidelberg, Germany, 2022; Volume 2, pp. 15–33. [Google Scholar]
- Ge, X.; Wang, J.; Ding, J.; Cao, X.; Zhang, Z.; Liu, J.; Li, X. Combining UAV-based hyperspectral imagery and machine learning algorithms for soil moisture content monitoring. PeerJ 2019, 7, e6926. [Google Scholar] [CrossRef]
- Su, J.; Coombes, M.; Liu, C.; Zhu, Y.; Song, X.; Fang, S.; Guo, L.; Chen, W.H. Machine learning-based crop drought mapping system by UAV remote sensing RGB imagery. Unmanned Syst. 2020, 8, 71–83. [Google Scholar] [CrossRef]
- Zhou, Z.; Majeed, Y.; Naranjo, G.D.; Gambacorta, E.M. Assessment for crop water stress with infrared thermal imagery in precision agriculture: A review and future prospects for deep learning applications. Comput. Electron. Agric. 2021, 182, 106019. [Google Scholar] [CrossRef]
- Cheng, M.; Jiao, X.; Liu, Y.; Shao, M.; Yu, X.; Bai, Y.; Wang, Z.; Wang, S.; Tuohuti, N.; Liu, S.; et al. Estimation of soil moisture content under high maize canopy coverage from UAV multimodal data and machine learning. Agric. Water Manag. 2022, 264, 107530. [Google Scholar] [CrossRef]
- Mithra, S.; Nagamalleswari, T. An analysis of deep learning models for dry land farming applications. Appl. Geomat. 2022, 1–7. [Google Scholar] [CrossRef]
- Reedha, R.; Dericquebourg, E.; Canals, R.; Hafiane, A. Transformer Neural Network for Weed and Crop Classification of High Resolution UAV Images. Remote Sens. 2022, 14, 592. [Google Scholar] [CrossRef]
- Zhang, X.; Han, L.; Dong, Y.; Shi, Y.; Huang, W.; Han, L.; González-Moreno, P.; Ma, H.; Ye, H.; Sobeih, T. A deep learning-based approach for automated yellow rust disease detection from high-resolution hyperspectral UAV images. Remote Sens. 2019, 11, 1554. [Google Scholar] [CrossRef] [Green Version]
- Tetila, E.C.; Machado, B.B.; Menezes, G.K.; Oliveira, A.D.S.; Alvarez, M.; Amorim, W.P.; Belete, N.A.D.S.; Da Silva, G.G.; Pistori, H. Automatic recognition of soybean leaf diseases using UAV images and deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2019, 17, 903–907. [Google Scholar] [CrossRef]
- Hu, G.; Wang, T.; Wan, M.; Bao, W.; Zeng, W. UAV remote sensing monitoring of pine forest diseases based on improved Mask R-CNN. Int. J. Remote Sens. 2022, 43, 1274–1305. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Wang, H.; Mou, Q.; Yue, Y.; Zhao, H. Research on detection technology of various fruit disease spots based on mask R-CNN. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020; pp. 1083–1087. [Google Scholar]
- Afzaal, U.; Bhattarai, B.; Pandeya, Y.R.; Lee, J. An Instance Segmentation Model for Strawberry Diseases Based on Mask R-CNN. Sensors 2021, 21, 6565. [Google Scholar] [CrossRef] [PubMed]
- Storey, G.; Meng, Q.; Li, B. Leaf Disease Segmentation and Detection in Apple Orchards for Precise Smart Spraying in Sustainable Agriculture. Sustainability 2022, 14, 1458. [Google Scholar] [CrossRef]
- Farzadpour, F.; Church, P.; Chen, X. Modeling and optimizing the coverage performance of the lidar sensor network. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Auckland, New Zealand, 9–12 July 2018; pp. 504–509. [Google Scholar]
- Michel, J.; Youssefi, D.; Grizonnet, M. Stable mean-shift algorithm and its application to the segmentation of arbitrarily large remote sensing images. IEEE Trans. Geosci. Remote Sens. 2014, 53, 952–964. [Google Scholar] [CrossRef]
- Sosa-Herrera, J.A.; Vallejo-Pérez, M.R.; Álvarez-Jarquín, N.; Cid-García, N.M.; López-Araujo, D.J. Geographic object-based analysis of airborne multispectral images for health assessment of Capsicum annuum L. crops. Sensors 2019, 19, 4817. [Google Scholar] [CrossRef]
- Kwenda, C.; Gwetu, M.; Dombeu, J.V.F. Machine Learning Methods for Forest Image Analysis and Classification: A Survey of the State of the Art. IEEE Access 2022, 10, 45290–45316. [Google Scholar] [CrossRef]
- Bahrami, M.; Mobasheri, M.R. Plant species determination by coding leaf reflectance spectrum and its derivatives. Eur. J. Remote Sens. 2020, 53, 258–273. [Google Scholar] [CrossRef]
- Sishodia, R.P.; Ray, R.L.; Singh, S.K. Applications of remote sensing in precision agriculture: A review. Remote Sens. 2020, 12, 3136. [Google Scholar] [CrossRef]
- Huang, S.; Tang, L.; Hupy, J.P.; Wang, Y.; Shao, G. A commentary review on the use of normalized difference vegetation index (NDVI) in the era of popular remote sensing. J. For. Res. 2021, 32, 1–6. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef] [Green Version]
- Medina-García, G.; Ruiz Corral, J.A. Estadísticas Climatológicas Básicas del Estado de Zacatecas (Periodo 1961–2003); Instituto Nacional de Investigaciones Forestales, Agrícolas y Pecuarias: Mexico City, Mexico, 2004. [Google Scholar]
- USB.org. On-The-Go and Embedded Host Supplement to the USB Revision 3.0 Specification; Rev. 3.0.; 2012. Available online: https://www.usb.org/sites/default/files/documents/usb_otg_and_eh_3-0_release_1_1_10may2012.pdf (accessed on 1 July 2022).
- NXP Semiconductors. I2C Bus Specification and User Manual; Rev. 7.0.; 2021. Available online: https://www.nxp.com/docs/en/user-guide/UM10204.pdf (accessed on 1 July 2022).
- Hamamatsu Photonics. C12880MA Final Inspection Sheet; Hamamatsu Photonics: Shizuoka, Japan, 2018. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. PyTorch: An Imperative Style, High-Performance Deep Learning Library. In Advances in Neural Information Processing Systems 32; Wallach, H., Larochelle, H., Beygelzimer, A., d’Alché-Buc, F., Fox, E., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2019; pp. 8024–8035. [Google Scholar]
- Wu, Y.; Kirillov, A.; Massa, F.; Lo, W.Y.; Girshick, R. Detectron2. 2019. Available online: https://github.com/facebookresearch/detectron2 (accessed on 1 January 2022).
- Girshick, R.; Radosavovic, I.; Gkioxari, G.; Dollár, P.; He, K. Detectron. 2018. Available online: https://github.com/facebookresearch/detectron (accessed on 1 January 2022).
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Girshick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional Architecture for Fast Feature Embedding. arXiv 2014, arXiv:1408.5093. [Google Scholar]
- QGIS Development Team. QGIS Geographic Information System; Open Source Geospatial Foundation: Beaverton, OR, USA, 2009. [Google Scholar]
- Snyder, J.P. The space oblique Mercator projection. Photogramm. Eng. Remote Sens. 1978, 44, 140. [Google Scholar]
- Sekachev, B.; Manovich, N.; Zhiltsov, M.; Zhavoronkov, A.; Kalinin, D.; Hoff, B.; TOsmanov; Kruchinin, D.; Zankevich, A.; Sidnev, D. opencv/cvat: v1.1.0, 2020. Available online: https://zenodo.org/record/4009388#.YzJst3ZByUk (accessed on 1 January 2022).
- Sotak, G.E., Jr.; Boyer, K.L. The Laplacian-of-Gaussian kernel: A formal analysis and design procedure for fast, accurate convolution and full-frame output. Comput. Vis. Graph. Image Process. 1989, 48, 147–189. [Google Scholar] [CrossRef]
- Mikolajczyk, K.; Tuytelaars, T.; Schmid, C.; Zisserman, A.; Matas, J.; Schaffalitzky, F.; Kadir, T.; Gool, L.V. A comparison of affine region detectors. Int. J. Comput. Vis. 2005, 65, 43–72. [Google Scholar] [CrossRef] [Green Version]
- Gedraite, E.S.; Hadad, M. Investigation on the effect of a Gaussian Blur in image filtering and segmentation. In Proceedings of the ELMAR-2011, Zadar, Croatia, 14–16 September 2011; pp. 393–396. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T. scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- Grizonnet, M.; Michel, J.; Poughon, V.; Inglada, J.; Savinaud, M.; Cresson, R. Orfeo ToolBox: Open source processing of remote sensing images. Open Geospat. Data, Softw. Stand. 2017, 2, 15. [Google Scholar] [CrossRef] [Green Version]
- Gupta, A.; Dollar, P.; Girshick, R. LVIS: A dataset for large vocabulary instance segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5356–5364. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Minaee, S.; Boykov, Y.Y.; Porikli, F.; Plaza, A.J.; Kehtarnavaz, N.; Terzopoulos, D. Image segmentation using deep learning: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 3523–3542. [Google Scholar] [CrossRef] [PubMed]
- Fu, C.Y.; Liu, W.; Ranga, A.; Tyagi, A.; Berg, A.C. Dssd: Deconvolutional single shot detector. arXiv 2017, arXiv:1701.06659. [Google Scholar]
- Camera & Imaging Products Association. Exchangeable Image File Format for Digital still Cameras: Exif Version 2.3; Camera & Imaging Products Association: Tokyo, Japan, 2012. [Google Scholar]
- Carvalho, O.L.F.d.; de Carvalho Junior, O.A.; Albuquerque, A.O.d.; Bem, P.P.d.; Silva, C.R.; Ferreira, P.H.G.; Moura, R.d.S.d.; Gomes, R.A.T.; Guimaraes, R.F.; Borges, D.L. Instance segmentation for large, multi-channel remote sensing imagery using mask-RCNN and a mosaicking approach. Remote Sens. 2020, 13, 39. [Google Scholar] [CrossRef]
- Amari, S.I. Backpropagation and stochastic gradient descent method. Neurocomputing 1993, 5, 185–196. [Google Scholar] [CrossRef]
- Everingham, M.; Eslami, S.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes challenge: A retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Kornilov, A.S.; Safonov, I.V. An overview of watershed algorithm implementations in open source libraries. J. Imaging 2018, 4, 123. [Google Scholar] [CrossRef] [Green Version]
- Aurenhammer, F.; Klein, R. Voronoi Diagrams. Handb. Comput. Geom. 2000, 5, 201–290. [Google Scholar]
- Dumoulin, V.; Visin, F. A guide to convolution arithmetic for deep learning. arXiv 2016, arXiv:1603.07285. [Google Scholar]
- Kang, W.X.; Yang, Q.Q.; Liang, R.P. The comparative research on image segmentation algorithms. In Proceedings of the 2009 First International Workshop on Education Technology and Computer Science, Wuhan, China, 7–8 March 2009; Volume 2, pp. 703–707. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detected Objects | Publications |
|---|---|
| pests | [21,22,23,24,25] |
| weeds | [26,27,28,29,30] |
| irrigation/drought levels | [31,32,33,34,35,36] |
| diseases | [37,38,39] |
| Objective | Backbone | Accuracy | Publication |
|---|---|---|---|
| Fruit spot disease detection | ResNet-101 | +96 | [43] |
| Diverse strawberry disease detection | ResNet-50 | 81.37 | [44] |
| ResNet-101 | 82.43 | ||
| Apple rust disease detection | ResNet-50 | 80.5 | [45] |
| MobileNet V3 Large | 68.3 | ||
| Large Mobile | 53.7 |
| Class | HC1 | HC2 | HC3 | HC4 | HC5 | GCP |
|---|---|---|---|---|---|---|
| Instances | 550 | 454 | 653 | 258 | 165 | 60 |
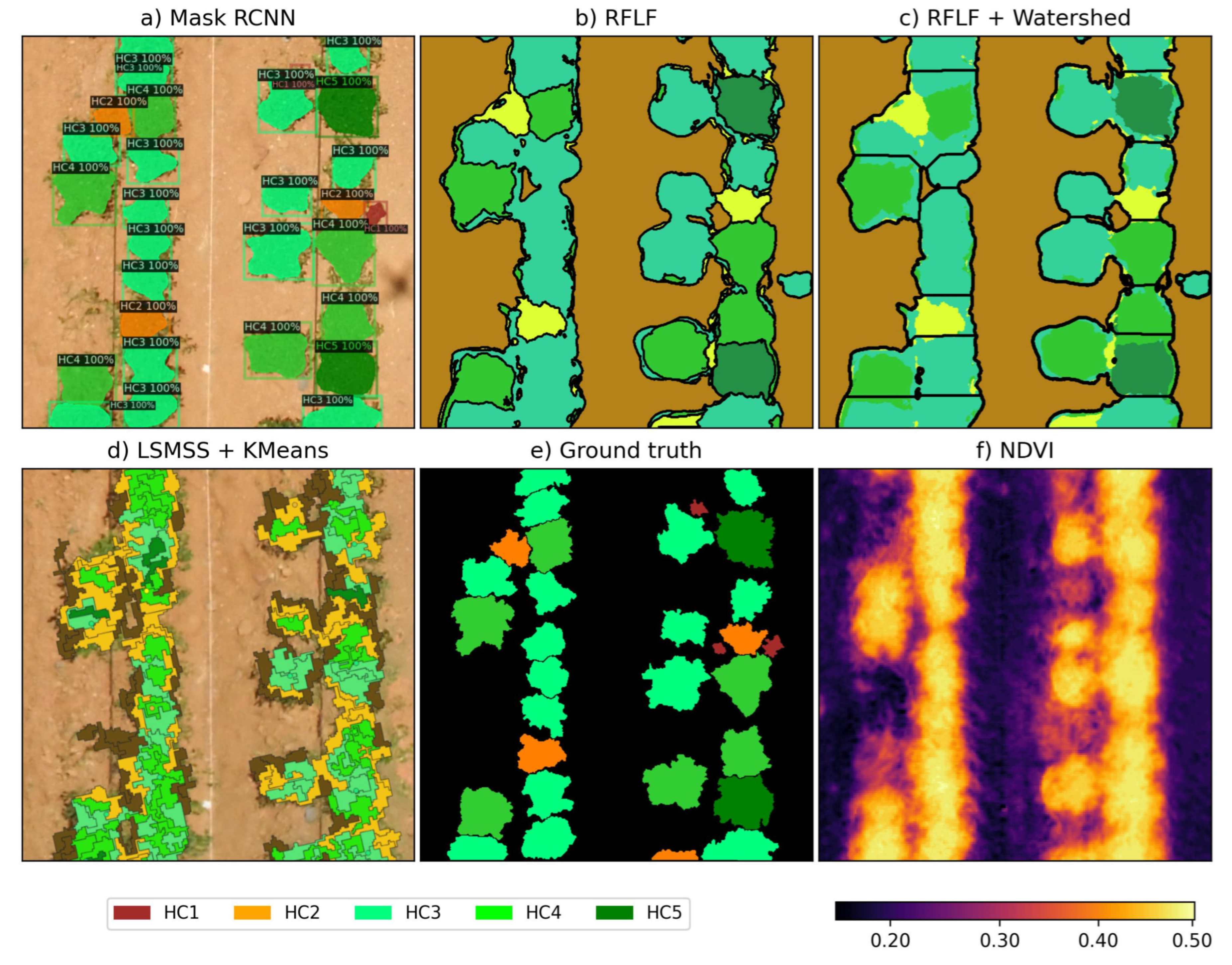
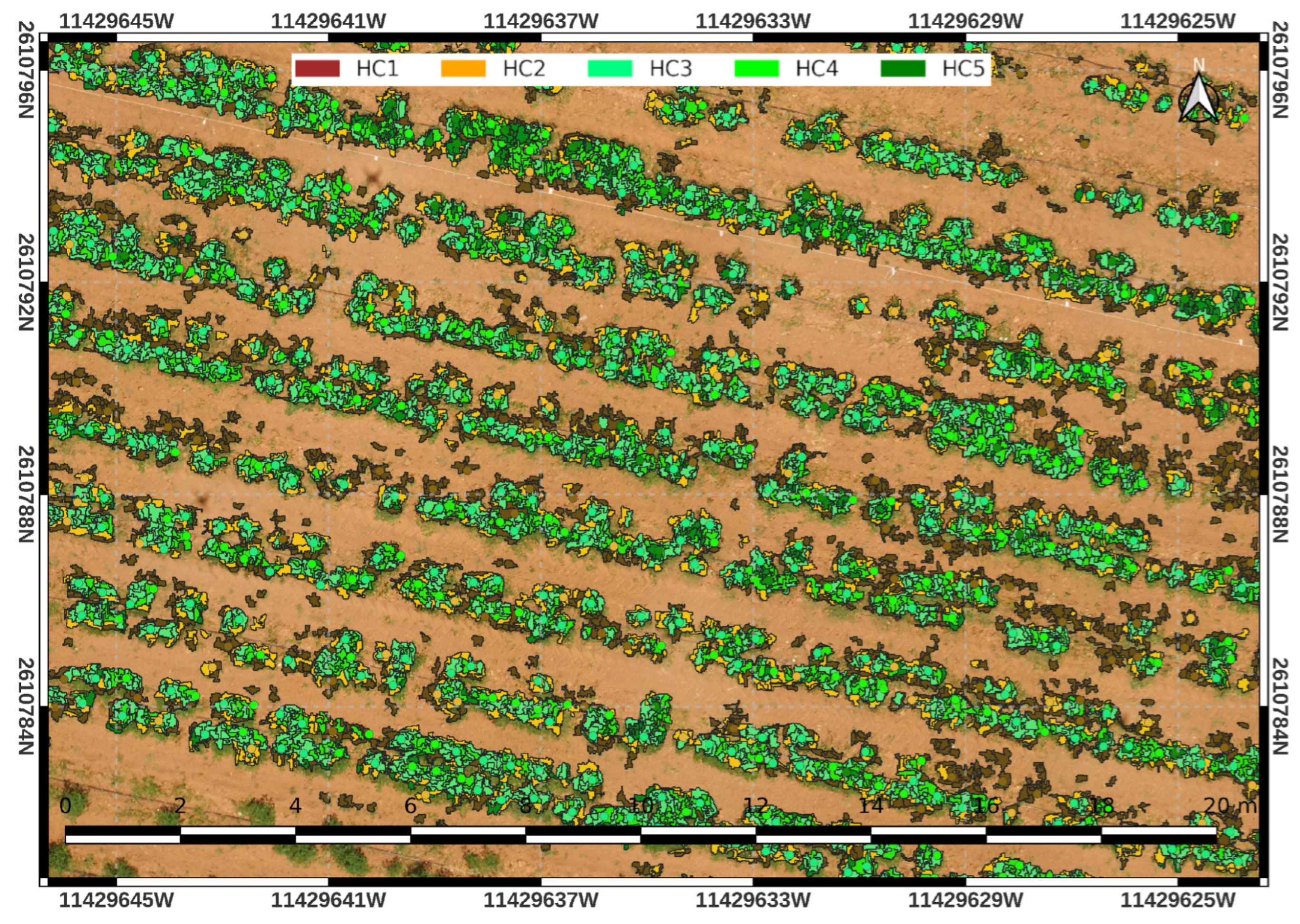
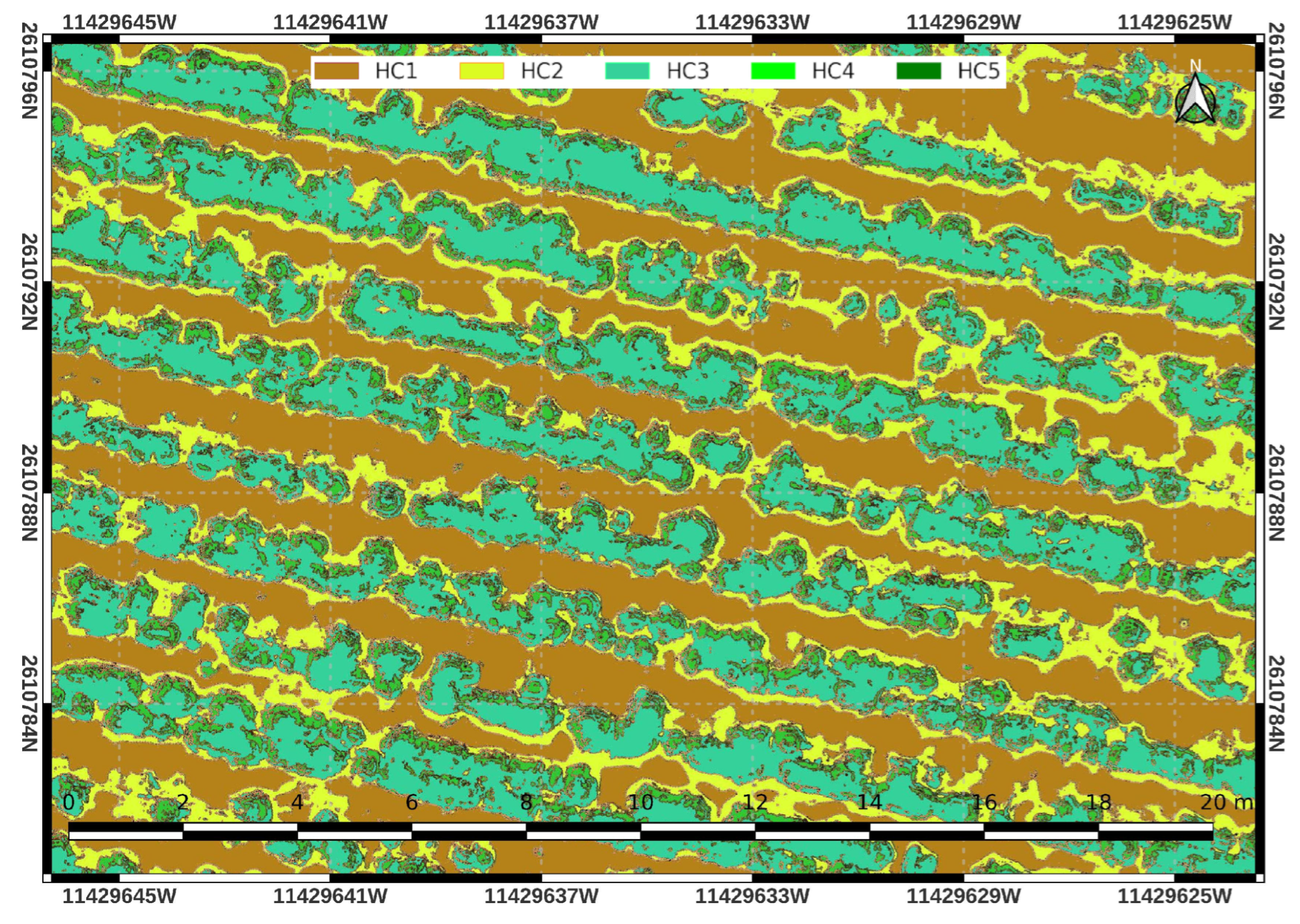
| Feature | Mask RCNN (Tiled) | RFLF | LSMSS (KMeans) | NDVI |
|---|---|---|---|---|
| Detected classes | 5 | 4 | 5 | 2 |
| Execution device | GPU + CPU | CPU | CPU | CPU |
| Image channels | RGB | RGB | RGB, REG, NIR | RED, NIR |
| Training time (s) | 27,756 | 2400 | − | − |
| Inference time (s) | 56 | 1184 | 4644 | 3.5 |
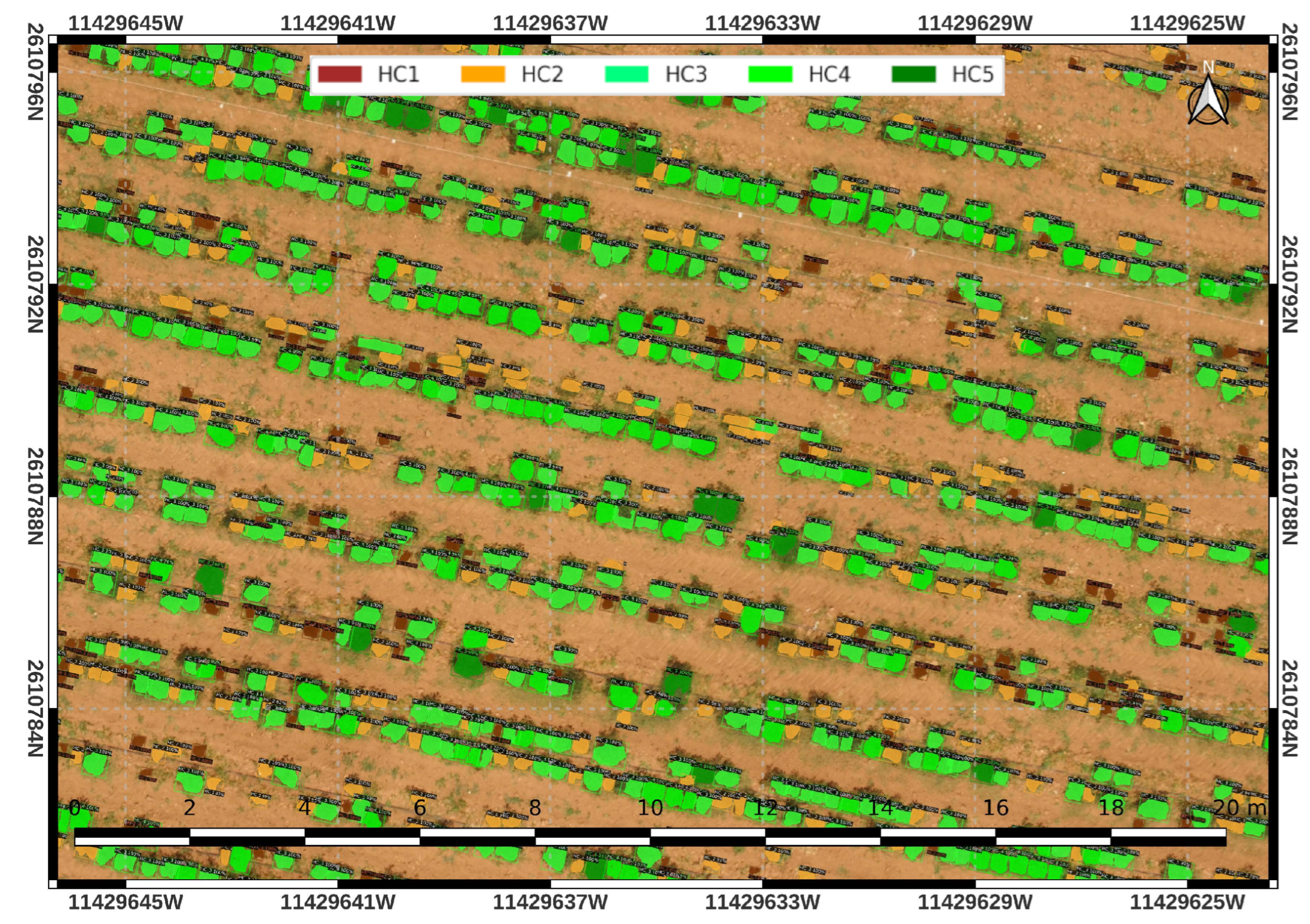
| Class | Instances | Avg. Score | Portion (%) | Foliar Area (m) |
|---|---|---|---|---|
| HC1 | 749 | 0.9594 | 14.87 | 359.12 |
| HC2 | 1396 | 0.9785 | 27.72 | 1110.76 |
| HC3 | 2115 | 0.9839 | 42.00 | 2733.30 |
| HC4 | 605 | 0.9714 | 12.07 | 1057.29 |
| HC5 | 167 | 0.9722 | 3.31 | 380.31 |
| All | 5035 | 0.9731 | 100.00 | 5640.81 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sosa-Herrera, J.A.; Alvarez-Jarquin, N.; Cid-Garcia, N.M.; López-Araujo, D.J.; Vallejo-Pérez, M.R. Automated Health Estimation of Capsicum annuum L. Crops by Means of Deep Learning and RGB Aerial Images. Remote Sens. 2022, 14, 4943. https://doi.org/10.3390/rs14194943
Sosa-Herrera JA, Alvarez-Jarquin N, Cid-Garcia NM, López-Araujo DJ, Vallejo-Pérez MR. Automated Health Estimation of Capsicum annuum L. Crops by Means of Deep Learning and RGB Aerial Images. Remote Sensing. 2022; 14(19):4943. https://doi.org/10.3390/rs14194943
Chicago/Turabian StyleSosa-Herrera, Jesús A., Nohemi Alvarez-Jarquin, Nestor M. Cid-Garcia, Daniela J. López-Araujo, and Moisés R. Vallejo-Pérez. 2022. "Automated Health Estimation of Capsicum annuum L. Crops by Means of Deep Learning and RGB Aerial Images" Remote Sensing 14, no. 19: 4943. https://doi.org/10.3390/rs14194943
APA StyleSosa-Herrera, J. A., Alvarez-Jarquin, N., Cid-Garcia, N. M., López-Araujo, D. J., & Vallejo-Pérez, M. R. (2022). Automated Health Estimation of Capsicum annuum L. Crops by Means of Deep Learning and RGB Aerial Images. Remote Sensing, 14(19), 4943. https://doi.org/10.3390/rs14194943