
Beach Profile, Water Level, and Wave Runup Measurements Using a Standalone Line-Scanning, Low-Cost (LLC) LiDAR System


Abstract
:1. Introduction
2. Materials and Methods
2.1. Design and Operation
2.2. Coordinate Transformations
3. Results
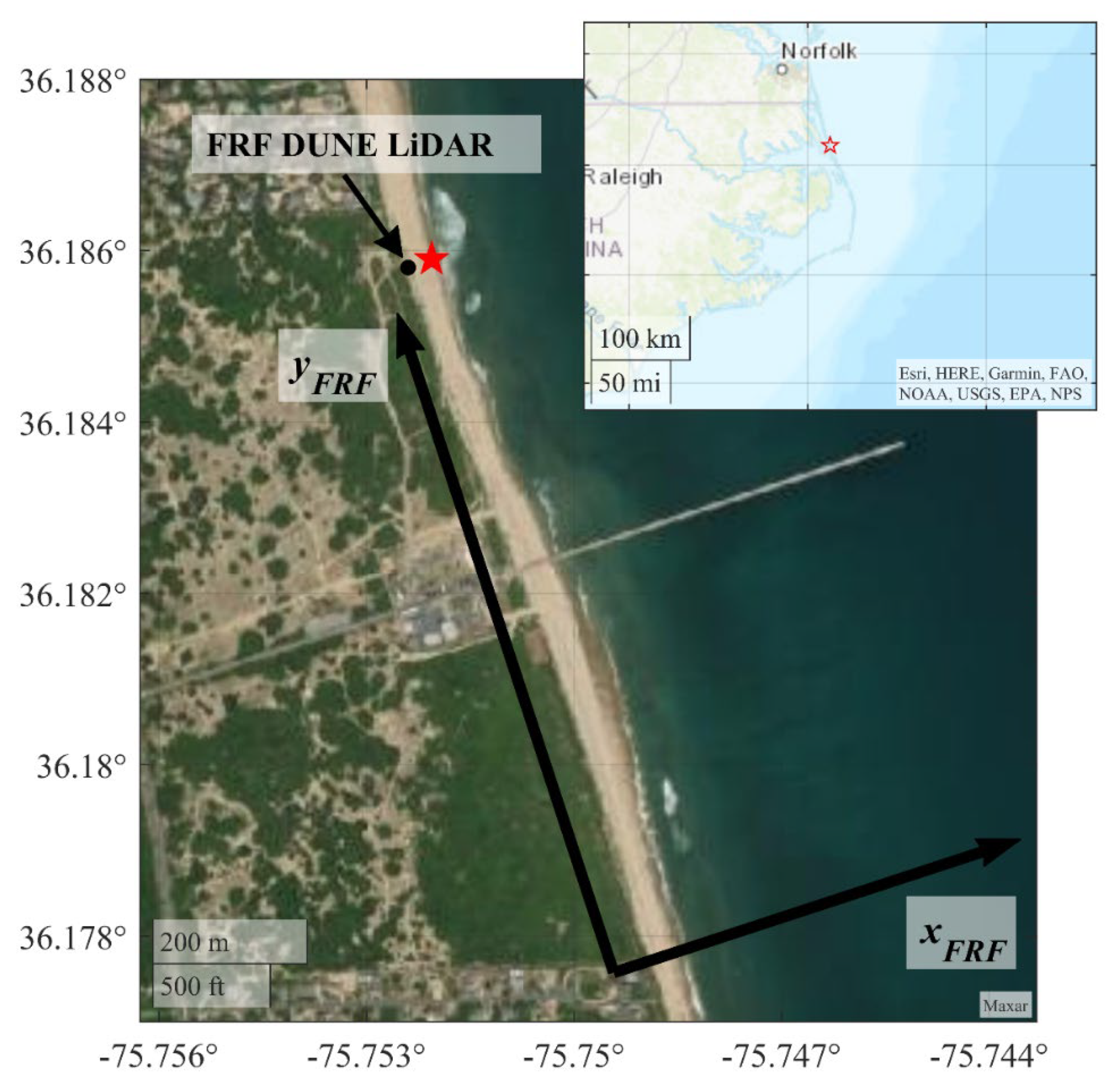
3.1. Background and Study Site
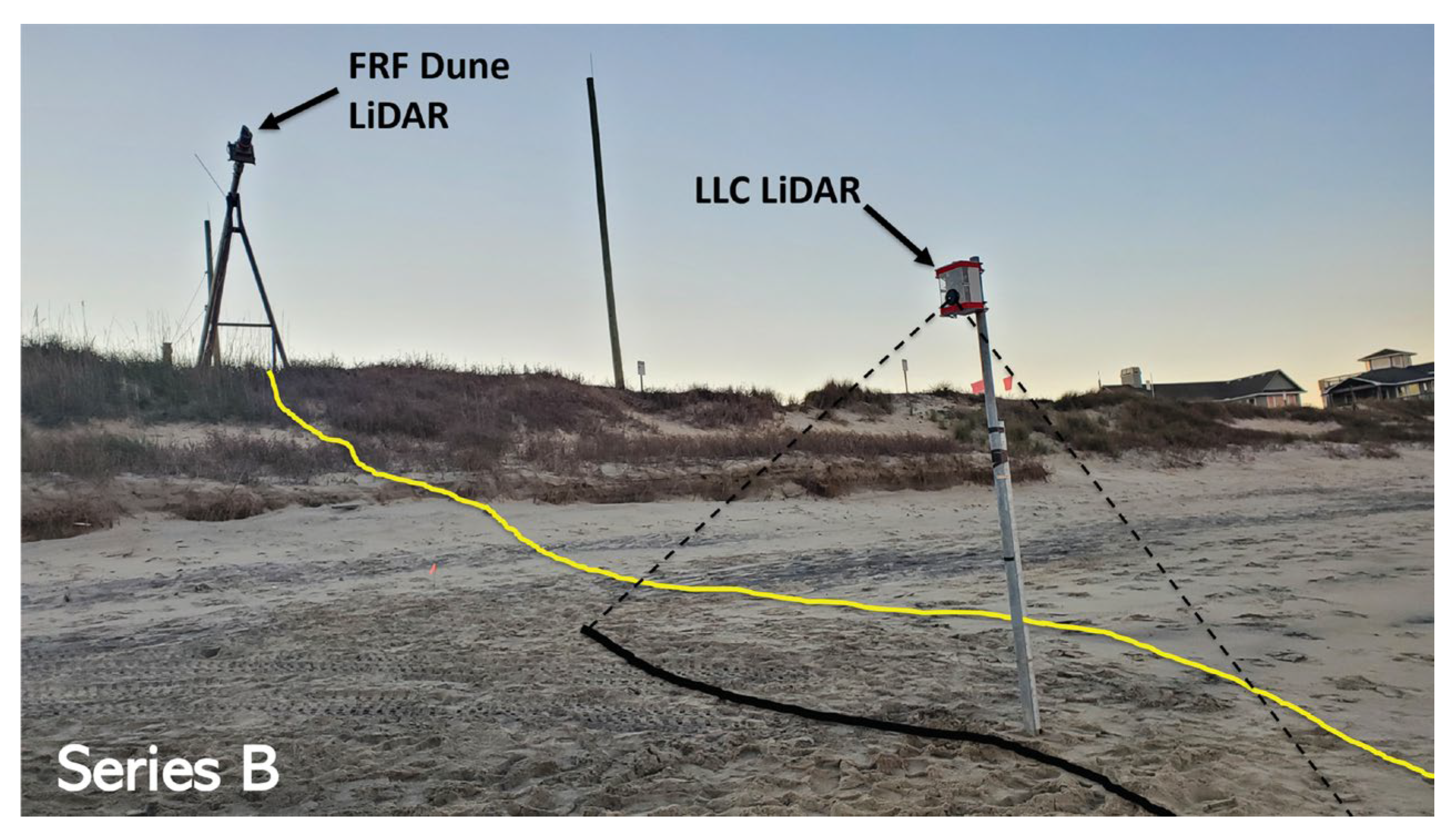
3.2. Setup and Experiment Description
3.3. LLC LiDAR Configuration
3.4. LLC LiDAR Data Treatment
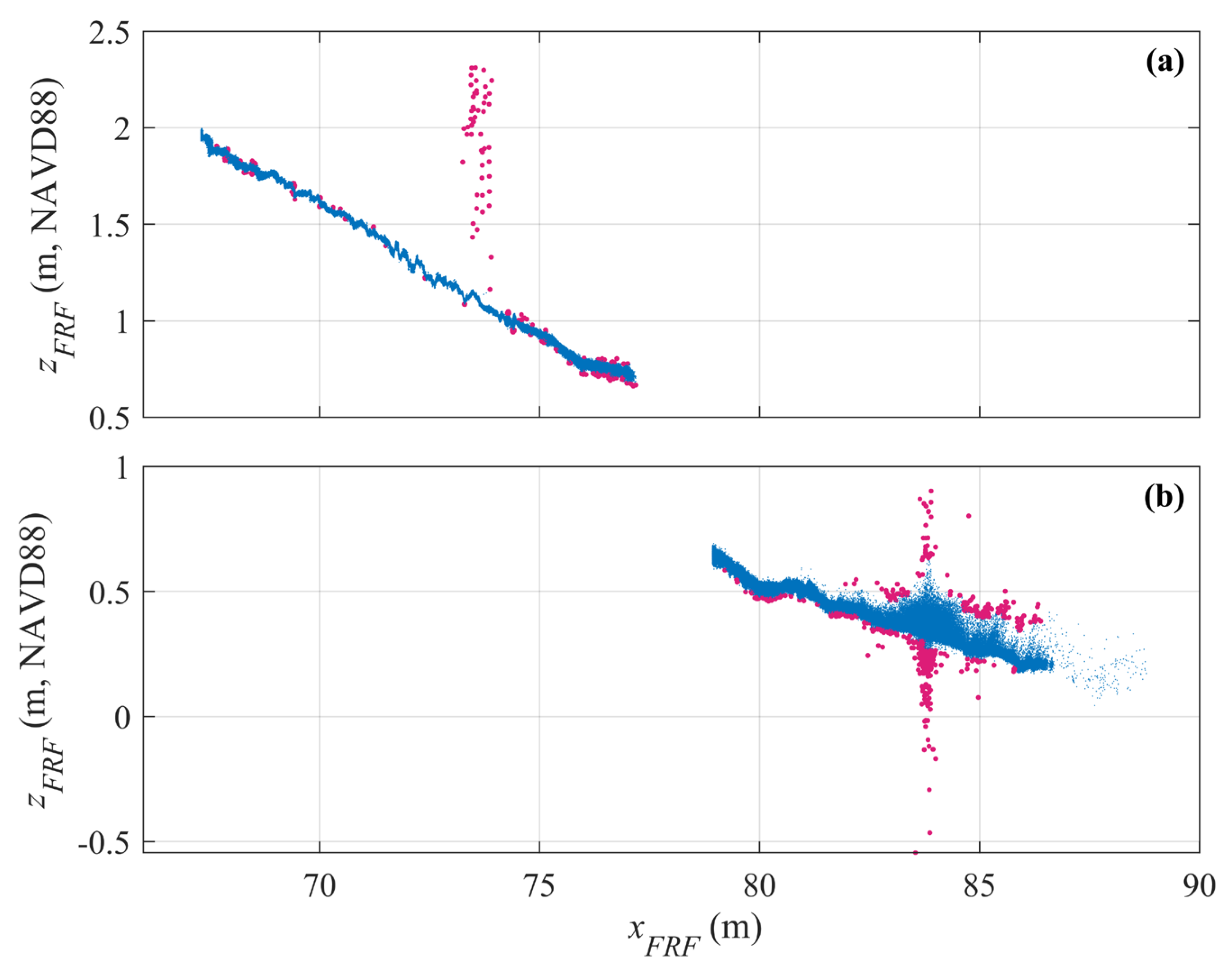
3.4.1. Point Cloud Georectification
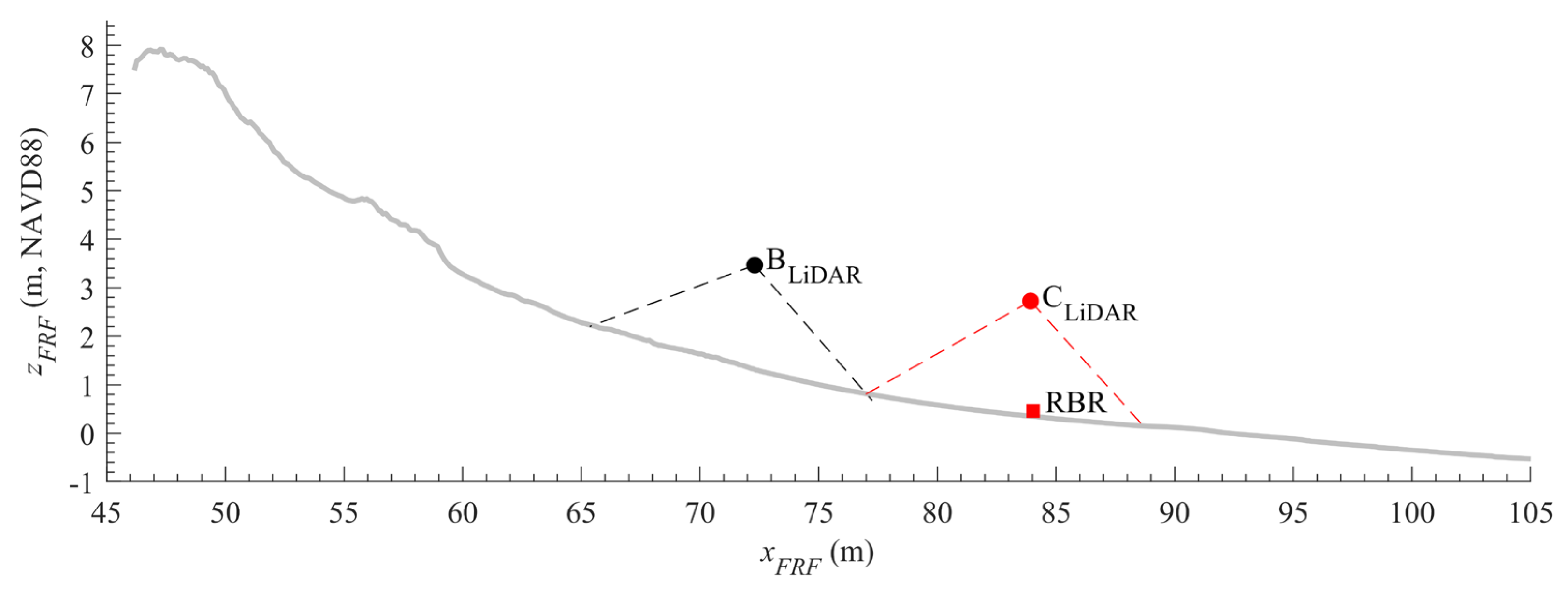
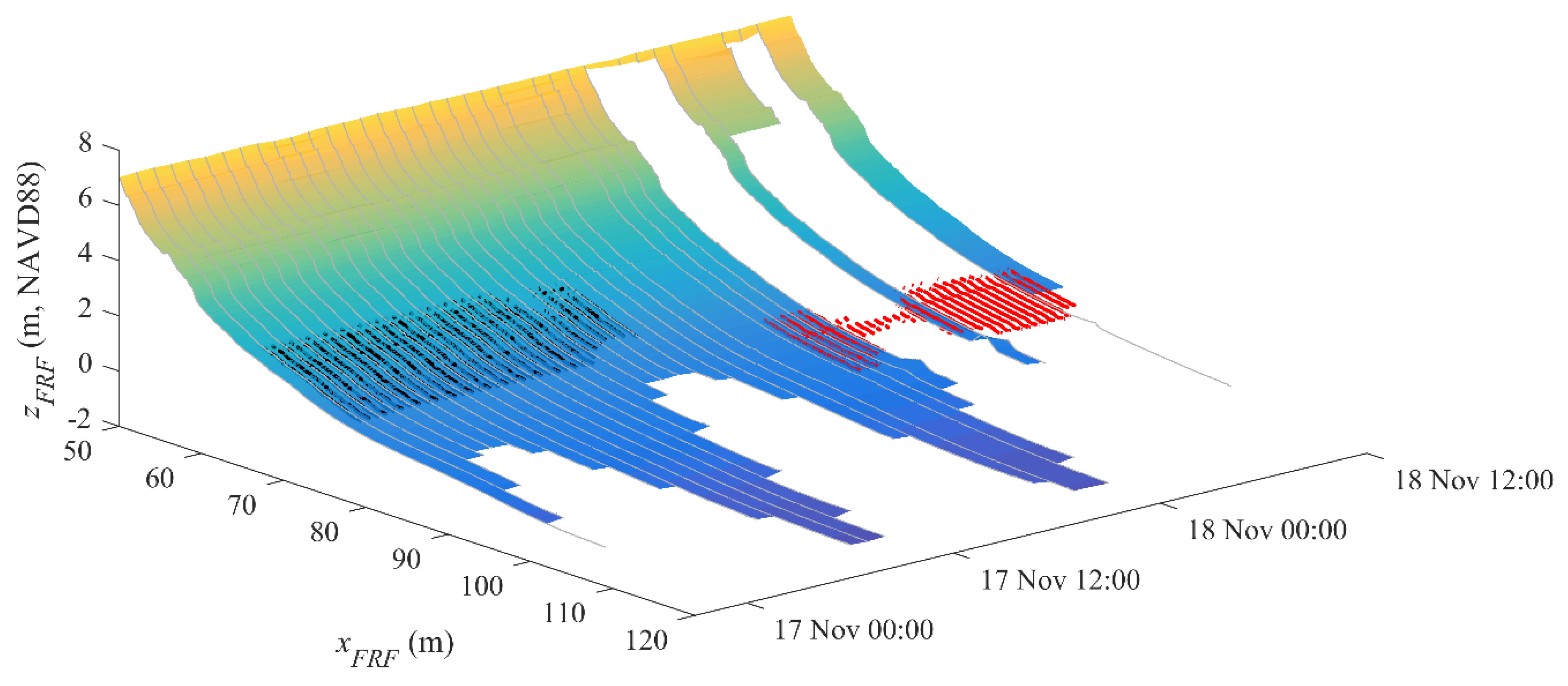
3.4.2. Beach Profiles
3.4.3. Gridded Surface
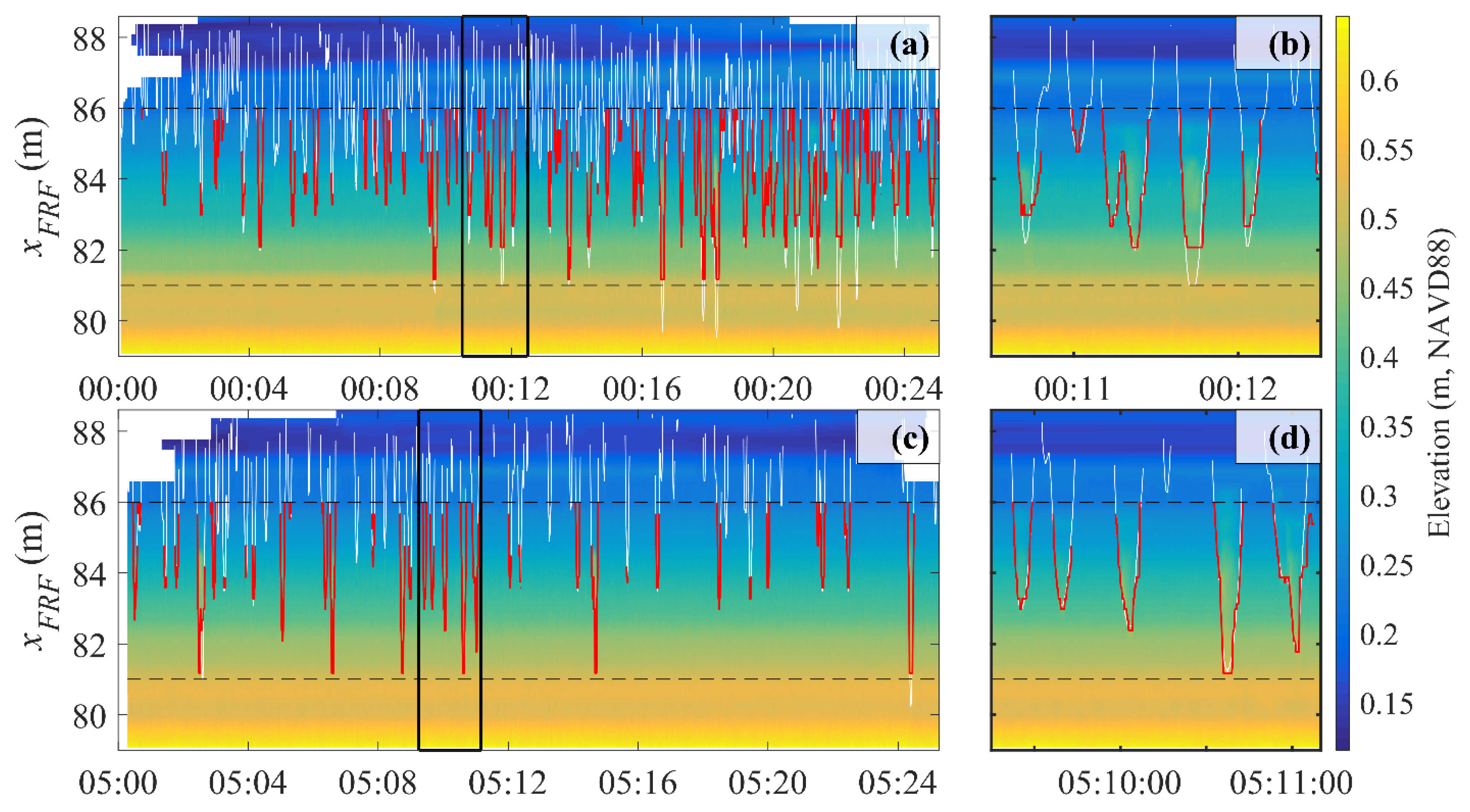
3.4.4. Wave Runup
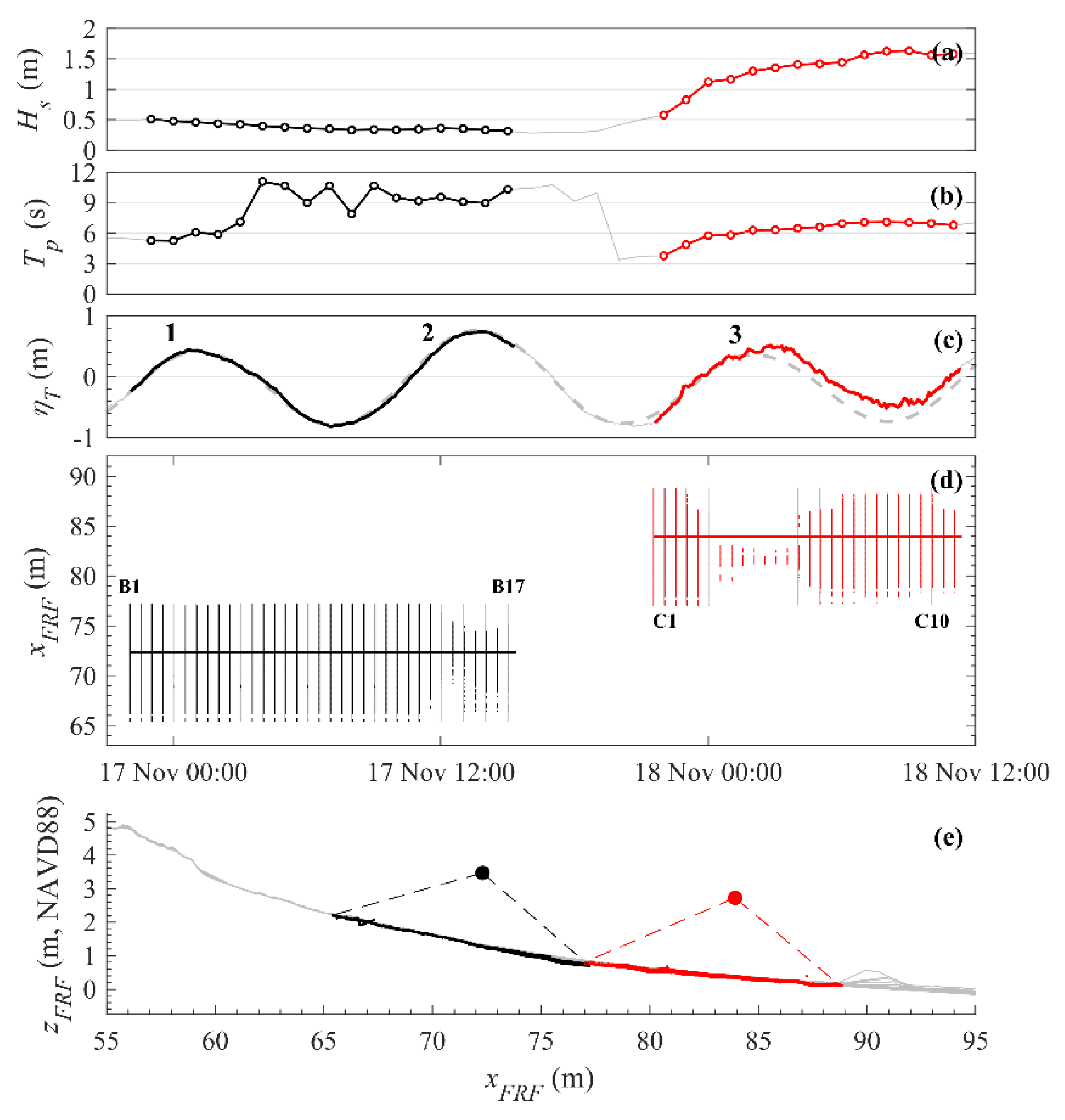
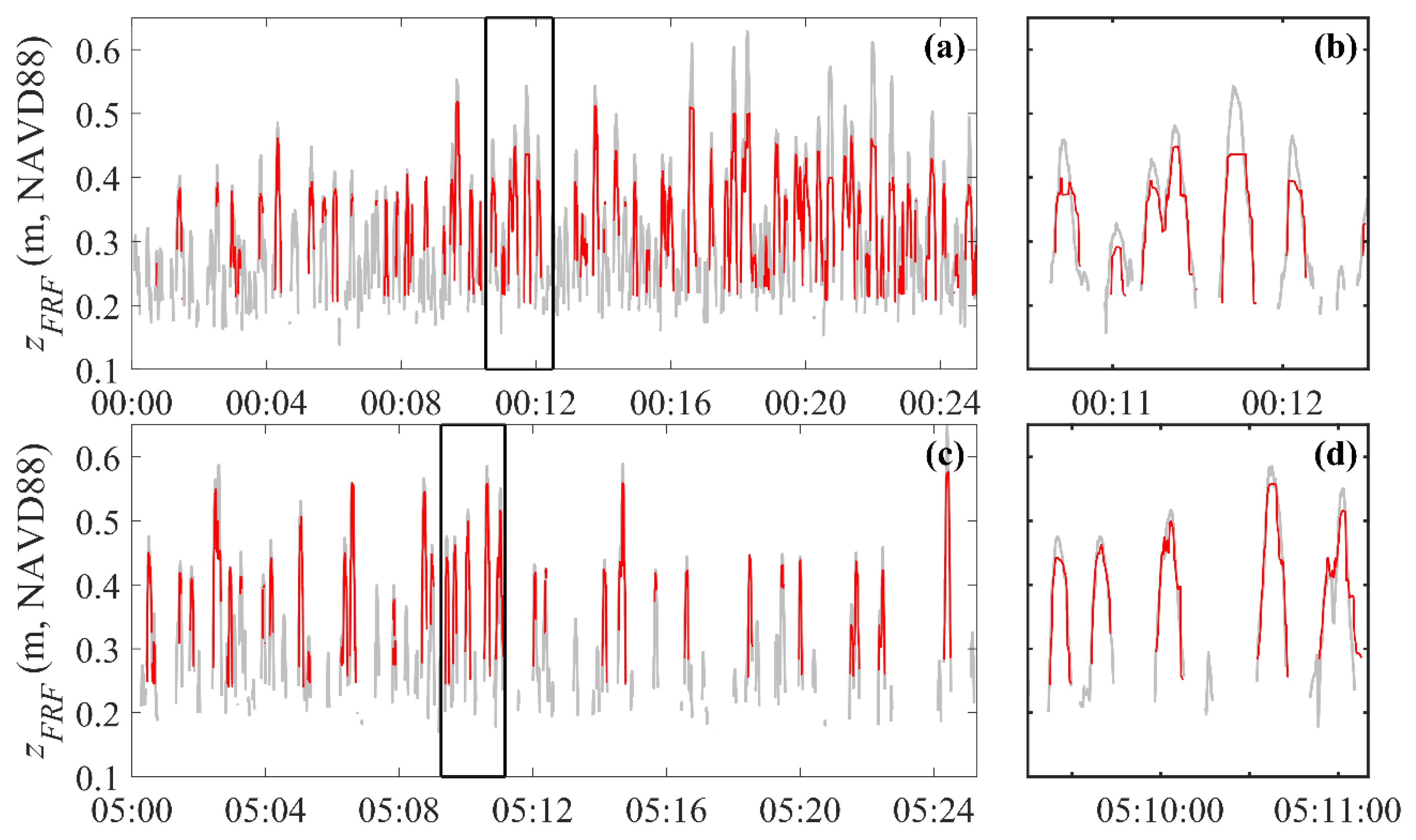
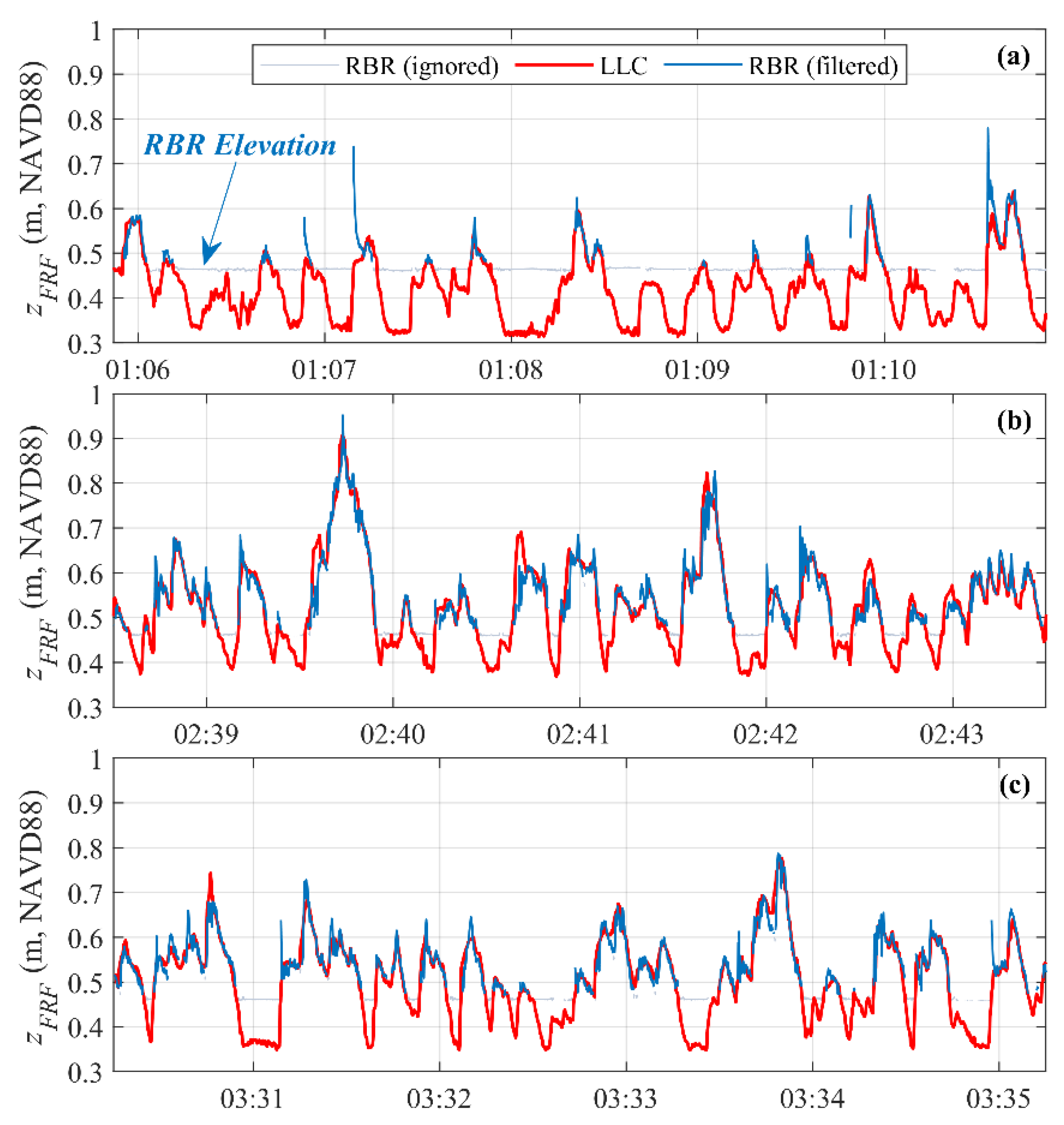
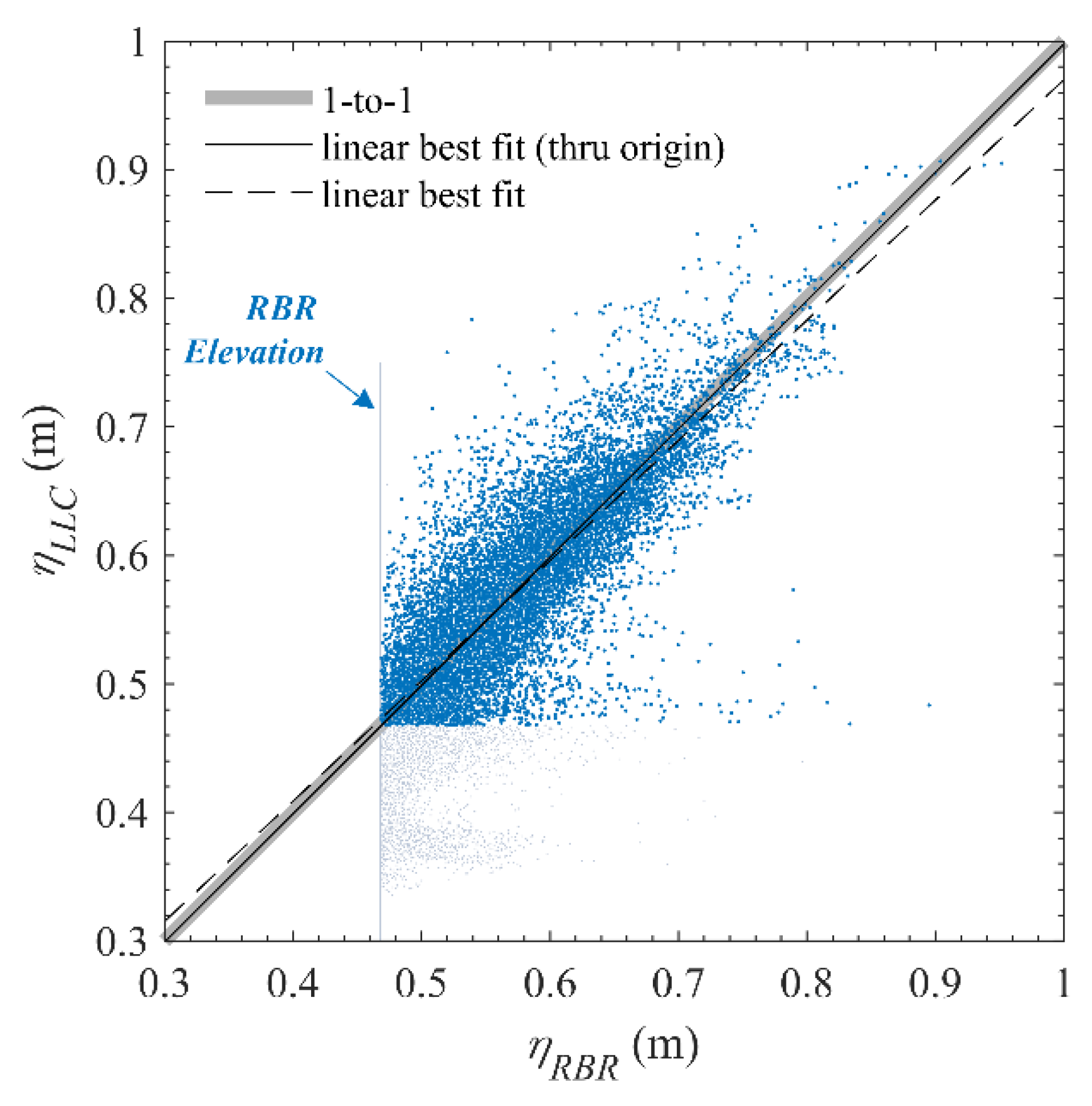
3.4.5. Free-Surface Elevation
4. Discussion
4.1. Beach Profiles and Morphology

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Profile | Series B RMSD (m) | Series C RMSD (m) |
|---|---|---|
| 1 | 0.039 | 0.027 |
| 2 | 0.043 | 0.029 |
| 3 | 0.045 | 0.031 |
| 4 | 0.041 | - |
| 5 | 0.043 | - |
| 6 | 0.040 | 0.032 |
| 7 | 0.041 | 0.031 |
| 8 | 0.043 | - |
| 9 | 0.043 | - |
| 10 | 0.043 | 0.033 |
| 11 | 0.046 | |
| 12 | 0.046 | |
| 13 | 0.045 | |
| 14 | 0.055 | |
| 15 | 0.046 | |
| 16 | 0.043 | |
| 17 | 0.053 | |
| 0.045 | 0.031 | |
| 0.004 | 0.002 |
4.2. Wave Runup
4.3. Free-Surface Elevation
4.4. Future Design Recommendations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Emanuel, K. Increasing Destructiveness of Tropical Cyclones over the Past 30 Years. Nature 2005, 436, 686–688. [Google Scholar] [CrossRef] [PubMed]
- Balaguru, K.; Foltz, G.R.; Leung, L.R. Increasing Magnitude of Hurricane Rapid Intensification in the Central and Eastern Tropical Atlantic. Geophys. Res. Lett. 2018, 45, 4238–4247. [Google Scholar] [CrossRef]
- Cadigan, J.A.; Bekkaye, J.H.; Jafari, N.H.; Zhu, L.; Booth, A.R.; Chen, Q.; Raubenheimer, B.; Harris, B.D.; O’Connor, C.; Lane, R.; et al. Impacts of Coastal Infrastructure on Shoreline Response to Major Hurricanes in Southwest Louisiana. Front. Built Environ. 2022, 8. [Google Scholar] [CrossRef]
- Neumann, B.; Vafeidis, A.T.; Zimmermann, J.; Nicholls, R.J. Future Coastal Population Growth and Exposure to Sea-Level Rise and Coastal Flooding—A Global Assessment. PLoS ONE 2015, 10, 1–34. [Google Scholar] [CrossRef] [Green Version]
- Anarde, K.A.; Kameshwar, S.; Irza, J.N.; Nittrouer, J.A.; Lorenzo-Trueba, J.; Padgett, J.E.; Sebastian, A.; Bedient, P.B. Impacts of Hurricane Storm Surge on Infrastructure Vulnerability for an Evolving Coastal Landscape. Nat. Hazards Rev. 2018, 19, 04017020. [Google Scholar] [CrossRef] [Green Version]
- NOAA National Centers for Environmental Information (NCEI). U.S. Billion-Dollar Weather and Climate Disasters. Available online: https://www.ncei.noaa.gov/access/billions/ (accessed on 28 August 2022).
- Elko, N.; Dietrich, C.; Cialone, M.; Stockdon, H.; Bilskie, M.W.; Boyd, B.; Charbonneau, B.; Cox, D.; Dresback, K.; Elgar, S.; et al. Advancing the Understanding of Storm Processes and Impacts. Shore Beach 2019, 87, 15. [Google Scholar]
- Sullivan, B.K. The Most Expensive U.S. Hurricane Season Ever: By the Numbers. Bloomberg. 27 November 2017. Available online: https://www.bloomberg.com/news/articles/2017-11-26/the-most-expensive-u-s-hurricane-season-ever-by-the-numbers (accessed on 28 August 2022).
- Elko, N.; Feddersen, F.; Foster, D.; Hapke, C.; McNinch, J.; Mulligan, R.; Özkan-Haller, H.; Plant, N.G.; Raubenheimer, B. The Future of Nearshore Processes Research. Shore Beach 2015, 83, 13–38. [Google Scholar]
- Stockdon, H.F.; Holman, R.A.; Howd, P.A.; Sallenger, A.H. Empirical Parameterization of Setup, Swash, and Runup. Coast. Eng. 2006, 53, 573–588. [Google Scholar] [CrossRef]
- Bunya, S.; Dietrich, J.C.; Westerink, J.J.; Ebersole, B.A.; Smith, J.M.; Atkinson, J.H.; Jensen, R.; Resio, D.T.; Luettich, R.A.; Dawson, C.; et al. A High-Resolution Coupled Riverine Flow, Tide, Wind, Wind Wave, and Storm Surge Model for Southern Louisiana and Mississippi. Part I: Model Development and Validation. Mon. Weather Rev. 2010, 138, 345–377. [Google Scholar] [CrossRef] [Green Version]
- Dietrich, J.C.; Westerink, J.J.; Kennedy, A.B.; Smith, J.M.; Jensen, R.E.; Zijlema, M.; Holthuijsen, L.H.; Dawson, C.; Luettich, R.A.; Powell, M.D.; et al. Hurricane Gustav (2008) Waves and Storm Surge: Hindcast, Synoptic Analysis, and Validation in Southern Louisiana. Mon. Weather Rev. 2011, 139, 2488–2522. [Google Scholar] [CrossRef]
- Hope, M.E.; Westerink, J.J.; Kennedy, A.B.; Kerr, P.C.; Dietrich, J.C.; Dawson, C.; Bender, C.J.; Smith, J.M.; Jensen, R.E.; Zijlema, M.; et al. Hindcast and Validation of Hurricane Ike (2008) Waves, Forerunner, and Storm Surge. J. Geophys. Res. Ocean. 2013, 118, 4424–4460. [Google Scholar] [CrossRef]
- Puleo, J.A.; Chardon-Maldonado, P. Bundlecuss: Cable Entanglement Lessons Learned From a Nor’easter Field Deployment. J. Coast. Res. 2020, 101, 359–362. [Google Scholar] [CrossRef]
- O’Dea, A.; Brodie, K.L.; Hartzell, P. Continuous Coastal Monitoring with an Automated Terrestrial Lidar Scanner. JMSE 2019, 7, 37. [Google Scholar] [CrossRef] [Green Version]
- Doran, K.S.; Long, J.W.; Overbeck, J.R. A Method for Determing Average Beach Slope and Beach Slope Variability for U.S. Sandy Coastlines; Open-File Report; U.S. Geological Survey: St. Petersburg, FL, USA, 2015.
- Turner, I.L.; Harley, M.D.; Short, A.D.; Simmons, J.A.; Bracs, M.A.; Phillips, M.S.; Splinter, K.D. A Multi-Decade Dataset of Monthly Beach Profile Surveys and Inshore Wave Forcing at Narrabeen, Australia. Sci. Data 2016, 3, 160024. [Google Scholar] [CrossRef] [Green Version]
- Mieras, R.S.; O’Connor, C.S.; Long, J.W. Rapid-Response Observations on Barrier Islands along Cape Fear, North Carolina, during Hurricane Isaias. Shore Beach 2021, 89, 86–96. [Google Scholar] [CrossRef]
- Reeves, I.R.B.; Goldstein, E.B.; Anarde, K.A.; Moore, L.J. Remote Bed-Level Change and Overwash Observation with Low-Cost Ultrasonic Distance Sensors. Shore Beach 2021, 89, 23–30. [Google Scholar] [CrossRef]
- Anarde, K.; Cheng, W.; Tissier, M.; Figlus, J.; Horrillo, J. Meteotsunamis Accompanying Tropical Cyclone Rainbands During Hurricane Harvey. J. Geophys. Res. Ocean. 2021, 126, e2020JC016347. [Google Scholar] [CrossRef]
- Martins, K.; Blenkinsopp, C.E.; Deigaard, R.; Power, H.E. Energy Dissipation in the Inner Surf Zone: New Insights From Li DAR-Based Roller Geometry Measurements. J. Geophys. Res. Ocean. 2018, 123, 3386–3407. [Google Scholar] [CrossRef]
- O’Dea, A.; Brodie, K.; Elgar, S. Field Observations of the Evolution of Plunging-Wave Shapes. Geophys. Res. Lett. 2021, 48, e2021GL093664. [Google Scholar] [CrossRef]
- Martins, K.; Blenkinsopp, C.E.; Power, H.E.; Bruder, B.; Puleo, J.A.; Bergsma, E.W.J. High-Resolution Monitoring of Wave Transformation in the Surf Zone Using a LiDAR Scanner Array. Coast. Eng. 2017, 128, 37–43. [Google Scholar] [CrossRef]
- Brodie, K.L.; Raubenheimer, B.; Elgar, S.; Slocum, R.K.; McNinch, J.E. Lidar and Pressure Measurements of Inner-Surfzone Waves and Setup. J. Atmos. Ocean. Technol. 2015, 32, 1945–1959. [Google Scholar] [CrossRef]
- Conery, I.; Brodie, K.; Spore, N.; Walsh, J. Terrestrial LiDAR Monitoring of Coastal Foredune Evolution in Managed and Unmanaged Systems. Earth Surf. Process. Landf. 2020, 45, 877–892. [Google Scholar] [CrossRef]
- Mieras, R.; Holsclaw, A.; Jernigan, T.; Miller, A.; Boot, K.; Raubenheimer, B. NEER: Winter Storm January 2022 Reconnaissance. Data Report. 2022. Available online: https://www.designsafe-ci.org/data/browser/public/designsafe.storage.published/PRJ-3423/#details-6681630317088140820-242ac118-0001-012 (accessed on 20 August 2022).
- Vos, S.; Spaans, L.; Reniers, A.; Holman, R.; Mccall, R.; de Vries, S. Cross-Shore Intertidal Bar Behavior along the Dutch Coast: Laser Measurements and Conceptual Model. J. Mar. Sci. Eng. 2020, 8, 864. [Google Scholar] [CrossRef]
- Borrell, S.J.; Puleo, J.A. In Situ Hydrodynamic and Morphodynamic Measurements during Extreme Storm Events. Shore Beach 2019, 87, 23–30. [Google Scholar]
- Chardón-Maldonado, P.; Pintado-Patiño, J.C.; Puleo, J.A. Advances in Swash-Zone Research: Small-Scale Hydrodynamic and Sediment Transport Processes. Coast. Eng. 2016, 115, 8–25. [Google Scholar] [CrossRef] [Green Version]
- Ruggiero, P.; Komar, P.D.; McDougal, W.G.; Marra, J.J.; Beach, R.A. Wave Runup, Extreme Water Levels and the Erosion of Properties Backing Beaches. J. Coast. Res. 2001, 17, 407–419. [Google Scholar]
- Sallenger, A.H., Jr. Storm Impact Scale for Barrier Islands. J. Coast. Res. 2000, 16, 890–895. [Google Scholar]
- Yazdani, E.; Montoya, B.; Wengrove, M.; Evans, T.M. Bio-Cementation for Protection of Coastal Dunes: Physical Models and Element Tests. In Geo-Congress 2022; American Society of Civil Engineers: Reston, VA, USA, 2022; pp. 406–416. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
O’Connor, C.S.; Mieras, R.S. Beach Profile, Water Level, and Wave Runup Measurements Using a Standalone Line-Scanning, Low-Cost (LLC) LiDAR System. Remote Sens. 2022, 14, 4968. https://doi.org/10.3390/rs14194968
O’Connor CS, Mieras RS. Beach Profile, Water Level, and Wave Runup Measurements Using a Standalone Line-Scanning, Low-Cost (LLC) LiDAR System. Remote Sensing. 2022; 14(19):4968. https://doi.org/10.3390/rs14194968
Chicago/Turabian StyleO’Connor, Christopher S., and Ryan S. Mieras. 2022. "Beach Profile, Water Level, and Wave Runup Measurements Using a Standalone Line-Scanning, Low-Cost (LLC) LiDAR System" Remote Sensing 14, no. 19: 4968. https://doi.org/10.3390/rs14194968