
Low-Cost GNSS and Real-Time PPP: Assessing the Precision of the u-blox ZED-F9P for Kinematic Monitoring Applications

 , , ,
, , ,
Abstract
:1. Introduction
2. Instrumentation and GNSS Processing
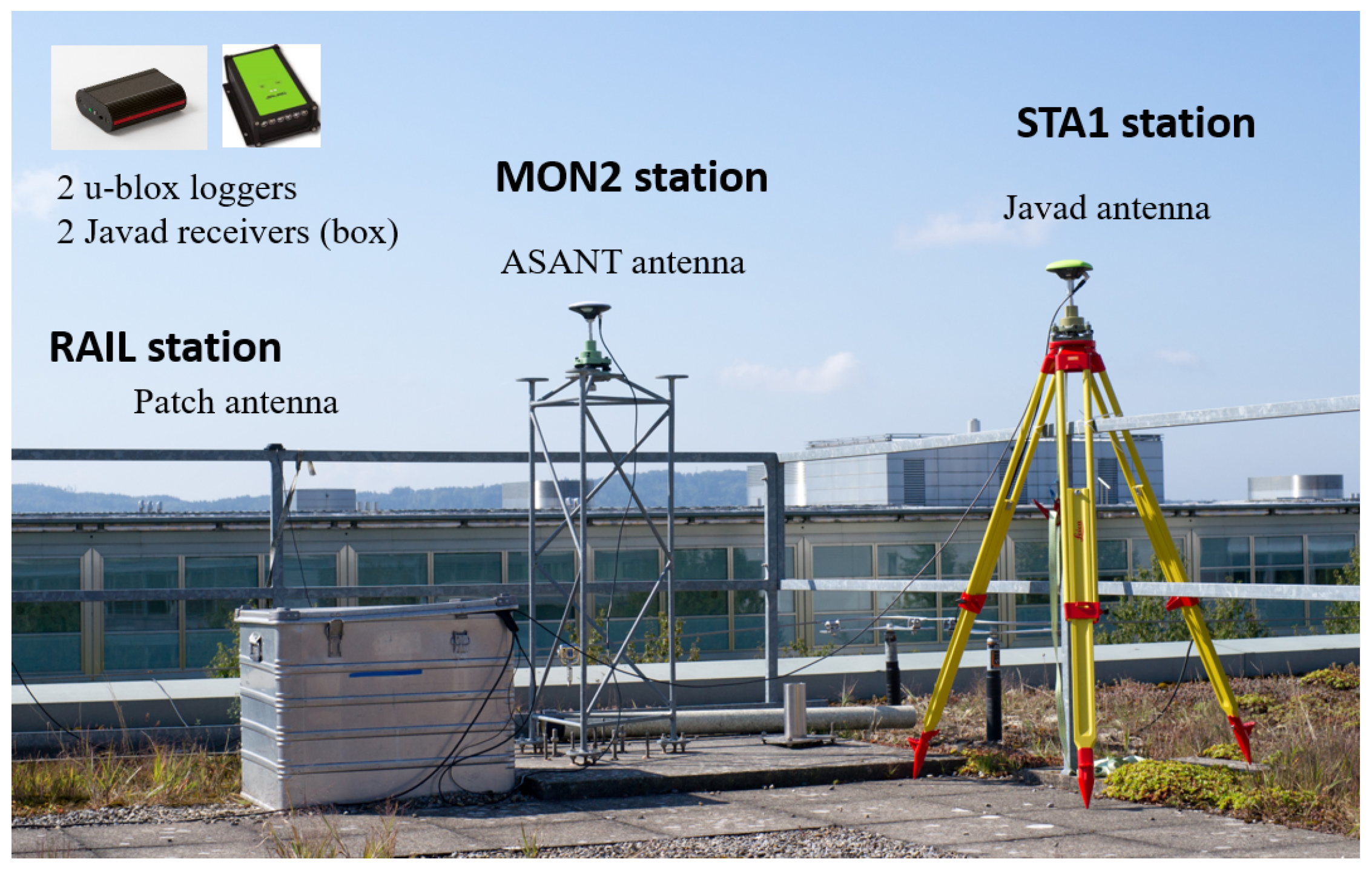
2.1. Instrumentation
2.2. Measurement Sessions
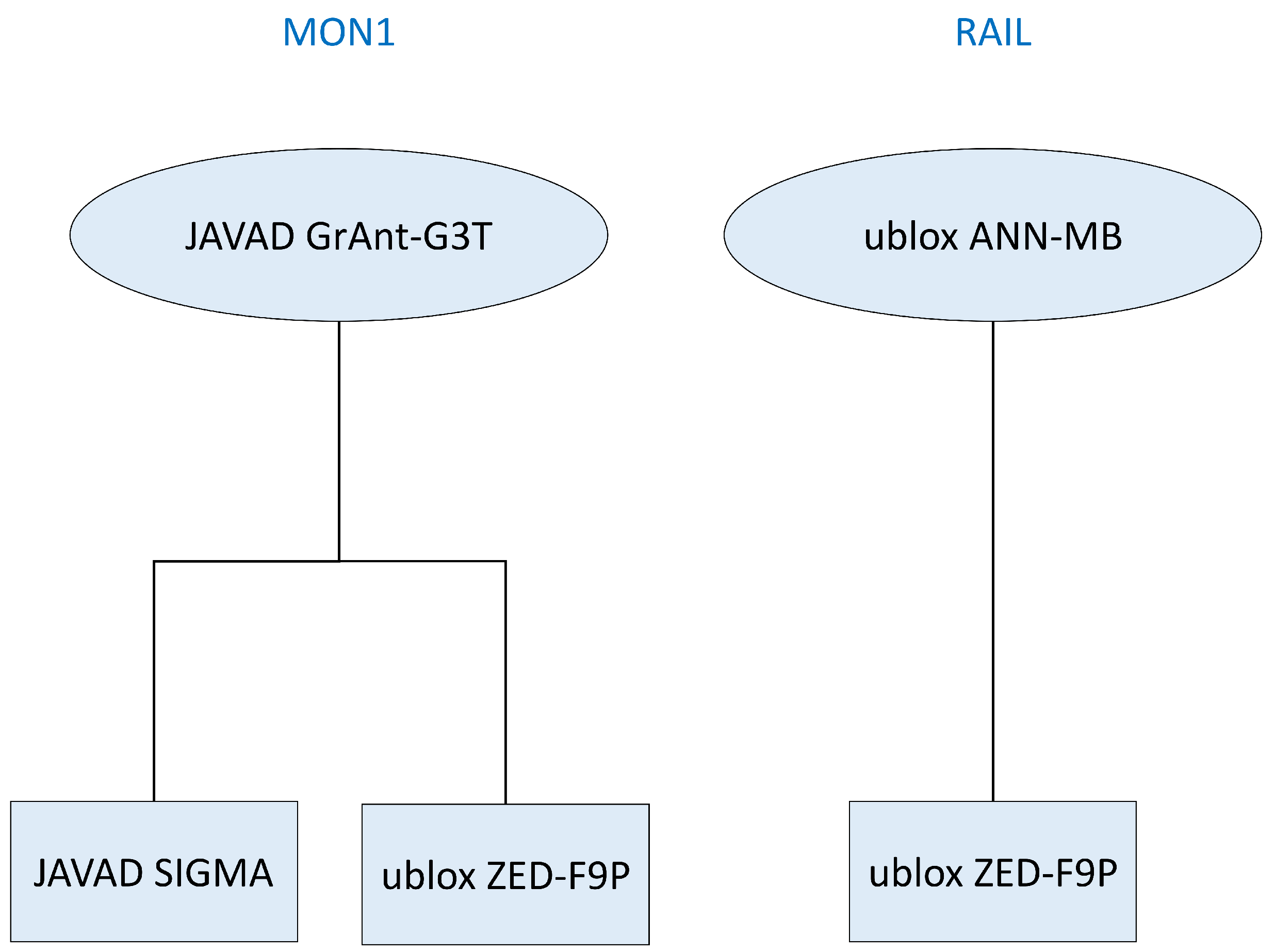
2.2.1. Session 1: u-blox and JAVAD Equipment, Static Kinematic and Dynamic Tests
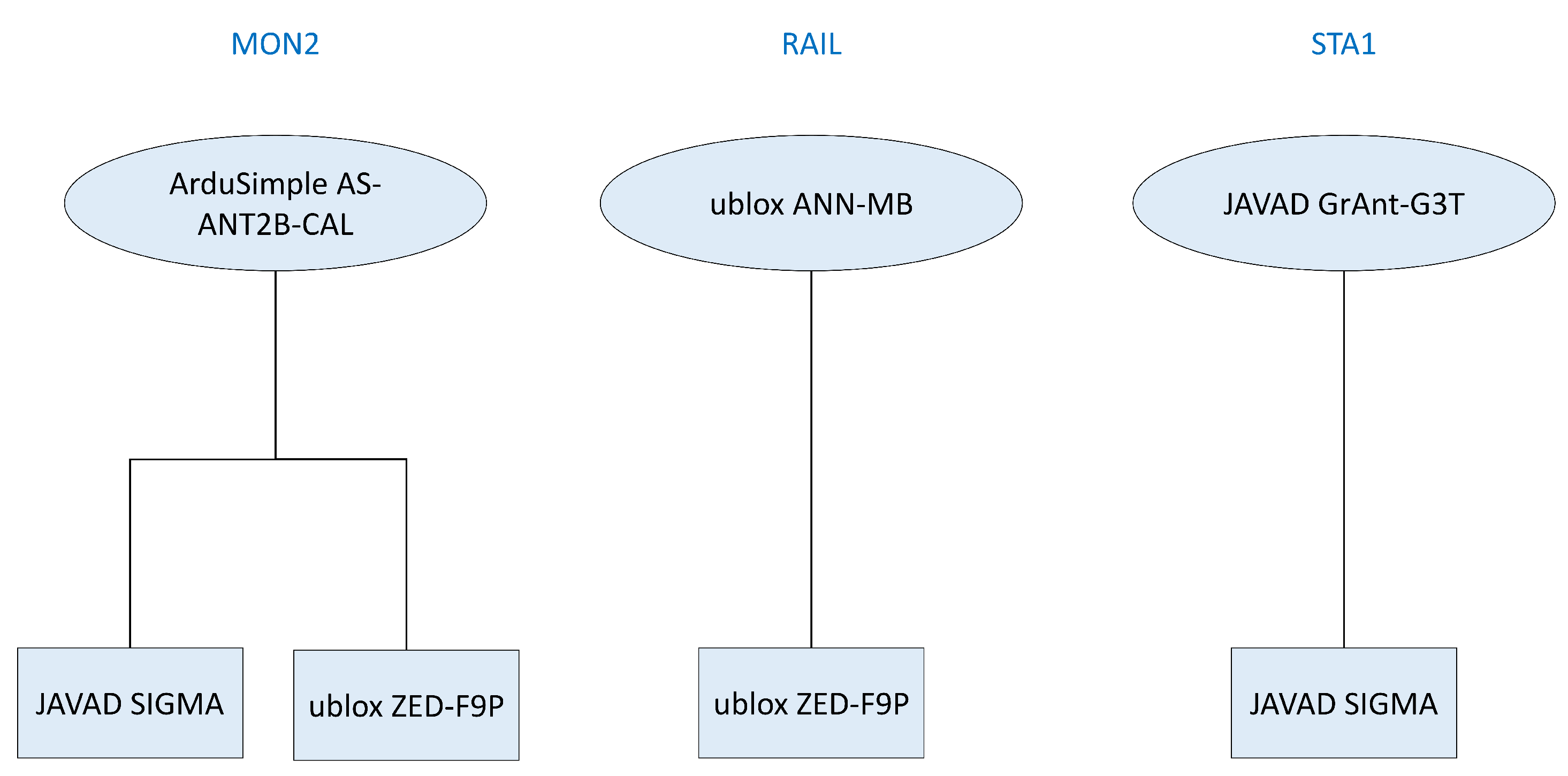
2.2.2. Session 2: u-blox and JAVAD Equipment, Helical Low-Cost Antenna, Static Kinematic Tests
2.2.3. Session 3: u-blox Equipment, Helical Low-Cost Antenna, Static Kinematic Tests
2.3. GNSS Processing
2.3.1. PPP-Wizard (Sessions 1 and 2)
2.3.2. raPPPid (Session 2)
2.3.3. u-blox PointPerfect (Session 3)
3. Results and Discussion
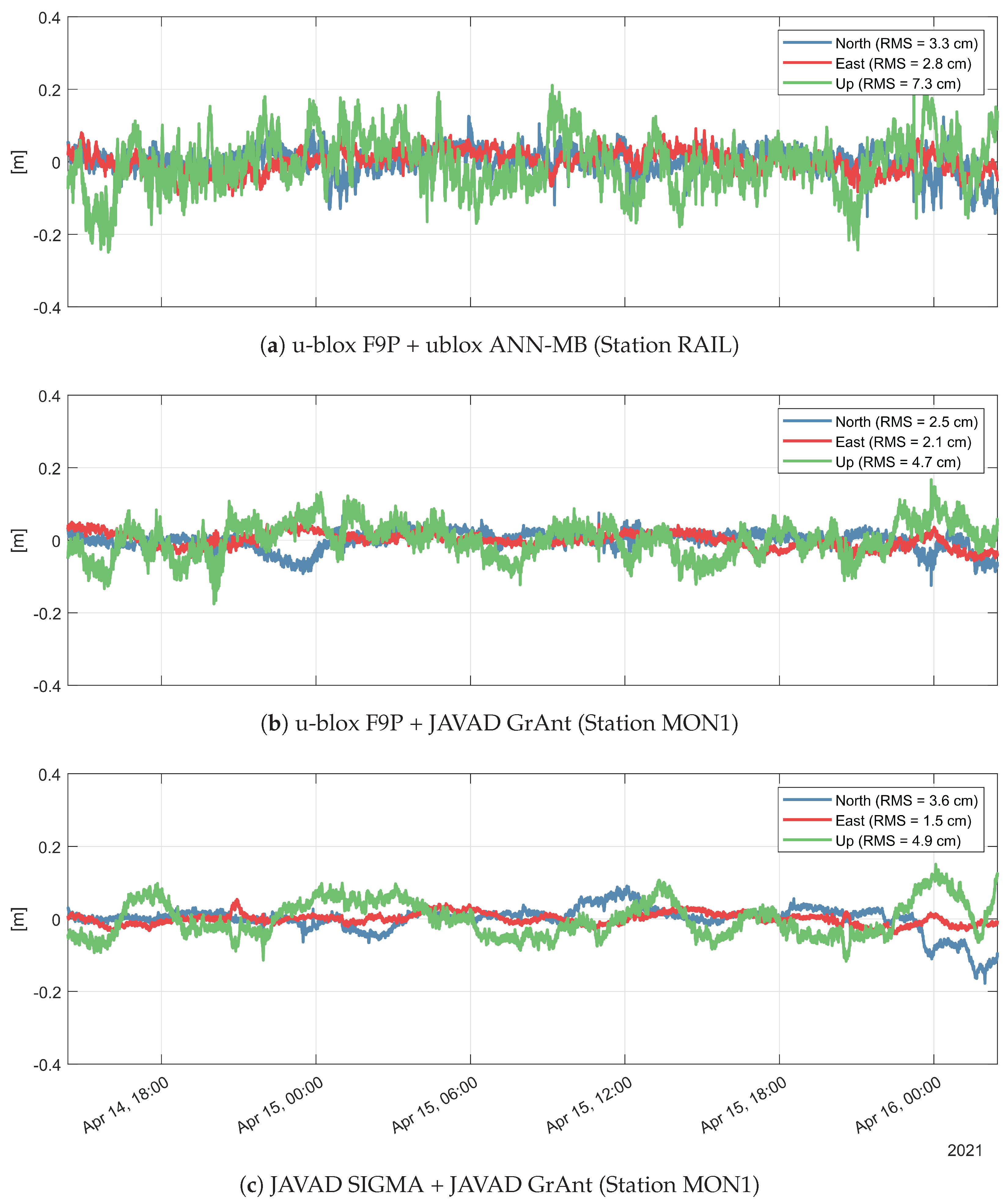
3.1. Session 1—PPP-Wizard Float Solutions
3.2. Session 2—PPP-Wizard Float Solutions, raPPPid Float and Fixed Solutions
3.3. Discussion—Sessions 1 and 2
3.4. Session 3—Point Perfect PPP-RTK Solutions
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Comparing the ‘Big 4’-A User’s View on GNSS Performance. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 407–418. [Google Scholar]
- Teunissen, P.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Alkan, R.M.; Erol, S.; İlçi, V.; Ozulu, İ.M. Comparative analysis of real-time kinematic and PPP techniques in dynamic environment. Measurement 2020, 163, 107995. [Google Scholar] [CrossRef]
- Chen, J.; Li, H.; Wu, B.; Zhang, Y.; Wang, J.; Hu, C. Performance of real-time precise point positioning. Mar. Geod. 2013, 36, 98–108. [Google Scholar] [CrossRef]
- Hadas, T. GNSS-Warp software for real-time precise point positioning. Artif. Satell. 2015, 50, 59. [Google Scholar]
- Wang, L.; Li, Z.; Ge, M.; Neitzel, F.; Wang, Z.; Yuan, H. Validation and assessment of multi-GNSS real-time precise point positioning in simulated kinematic mode using IGS real-time service. Remote Sens. 2018, 10, 337. [Google Scholar] [CrossRef] [Green Version]
- Elsobeiey, M.; Al-Harbi, S. Performance of real-time Precise Point Positioning using IGS real-time service. GPS Solut. 2016, 20, 565–571. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Zumberge, J.; Heflin, M.; Jefferson, D.; Watkins, M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Gao, J. Kinematic precise point positioning using multi-constellation global navigation satellite system (GNSS) observations. ISPRS Int. J. Geo-Inf. 2017, 6, 6. [Google Scholar] [CrossRef] [Green Version]
- Leandro, R.; Landau, H.; Nitschke, M.; Glocker, M.; Seeger, S.; Chen, X.; Deking, A.; BenTahar, M.; Zhang, F.; Ferguson, K.; et al. RTX positioning: The next generation of cm-accurate real-time GNSS positioning. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 19–23 September 2011; pp. 1460–1475. [Google Scholar]
- Wubbena, G.; Schmitz, M.; Bagge, A. PPP-RTK: Precise point positioning using state-space representation in RTK networks. In Proceedings of the 18th international technical meeting of the satellite division of the Institute of navigation (ION GNSS 2005), Fort Worth, TX, USA, 25–28 September 2005; pp. 2584–2594. [Google Scholar]
- Teunissen, P.; Khodabandeh, A. Review and principles of PPP-RTK methods. J. Geod. 2015, 89, 217–240. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geod. 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Glaner, M.; Weber, R. PPP with integer ambiguity resolution for GPS and Galileo using satellite products from different analysis centers. GPS Solut. 2021, 25, 1–13. [Google Scholar]
- Laurichesse, D.; Mercier, F.; Berthias, J.P.; Broca, P.; Cerri, L. Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination. Navigation 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.A.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Banville, S.; Geng, J.; Loyer, S.; Schaer, S.; Springer, T.; Strasser, S. On the interoperability of IGS products for precise point positioning with ambiguity resolution. J. Geod. 2020, 94, 1–15. [Google Scholar] [CrossRef]
- Tsakiri, M.; Sioulis, A.; Piniotis, G. The use of low-cost, single-frequency GNSS receivers in mapping surveys. Surv. Rev. 2018, 50, 46–56. [Google Scholar] [CrossRef]
- Lu, L.; Ma, L.; Wu, T.; Chen, X. Performance analysis of positioning solution using low-cost single-frequency u-blox receiver based on baseline length constraint. Sensors 2019, 19, 4352. [Google Scholar] [CrossRef] [Green Version]
- Kenner, R.; Pruessner, L.; Beutel, J.; Limpach, P.; Phillips, M. How rock glacier hydrology, deformation velocities and ground temperatures interact: Examples from the Swiss Alps. Permafr. Periglac. Process. 2020, 31, 3–14. [Google Scholar] [CrossRef]
- Cina, A.; Piras, M. Performance of low-cost GNSS receiver for landslides monitoring: Test and results. Geomat. Nat. Hazards Risk 2015, 6, 497–514. [Google Scholar] [CrossRef]
- Tsakiri, M.; Sioulis, A.; Piniotis, G. Compliance of low-cost, single-frequency GNSS receivers to standards consistent with ISO for control surveying. Int. J. Metrol. Qual. Eng. 2017, 8, 11. [Google Scholar] [CrossRef] [Green Version]
- Garrido-Carretero, M.S.; Borque-Arancón, M.J.; Ruiz-Armenteros, A.M.; Moreno-Guerrero, R.; Gil-Cruz, A.J. Low-cost GNSS receiver in RTK positioning under the standard ISO-17123-8: A feasible option in geomatics. Measurement 2019, 137, 168–178. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J. Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: A low-cost and high-grade receivers GPS-BDS RTK analysis. J. Geod. 2016, 90, 1255–1278. [Google Scholar] [CrossRef]
- Hamza, V.; Stopar, B.; Sterle, O. Testing the performance of multi-frequency low-cost gnss receivers and antennas. Sensors 2021, 21, 2029. [Google Scholar] [CrossRef]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS. International Convention Center, Jeju, Korea, 12–17 July 2009; Volume 1. [Google Scholar]
- Hamza, V.; Stopar, B.; Ambrožič, T.; Sterle, O. Performance Evaluation of Low-Cost Multi-Frequency GNSS Receivers and Antennas for Displacement Detection. Appl. Sci. 2021, 11, 6666. [Google Scholar] [CrossRef]
- Tunini, L.; Zuliani, D.; Magrin, A. Applicability of Cost-Effective GNSS Sensors for Crustal Deformation Studies. Sensors 2022, 22, 350. [Google Scholar] [CrossRef]
- Janos, D.; Kuras, P.; Ortyl, Ł. Evaluation of Low-Cost RTK GNSS Receiver in Motion under Demanding Conditions. Measurement 2022, 201, 111647. [Google Scholar] [CrossRef]
- Wielgocka, N.; Hadas, T.; Kaczmarek, A.; Marut, G. Feasibility of using low-cost dual-frequency gnss receivers for land surveying. Sensors 2021, 21, 1956. [Google Scholar] [CrossRef]
- Paziewski, J. Multi-constellation single-frequency ionospheric-free precise point positioning with low-cost receivers. GPS Solut. 2022, 26, 1–11. [Google Scholar] [CrossRef]
- Krietemeyer, A.; van der Marel, H.; van de Giesen, N.; ten Veldhuis, M.C. High quality zenith tropospheric delay estimation using a low-cost dual-frequency receiver and relative antenna calibration. Remote Sens. 2020, 12, 1393. [Google Scholar] [CrossRef]
- Nie, Z.; Liu, F.; Gao, Y. Real-time precise point positioning with a low-cost dual-frequency GNSS device. GPS Solut. 2020, 24, 1–11. [Google Scholar] [CrossRef]
- Bock, Y.; Wdowinski, S. GNSS Geodesy in Geophysics, Natural Hazards, Climate, and the Environment. In Position, Navigation, and Timing Technologies in the 21st Century: Integrated Satellite Navigation, Sensor Systems, and Civil Applications; John Wiley & Sons: Hoboken, NJ, USA, 2020; Volume 1, pp. 741–820. [Google Scholar]
- Shen, N.; Chen, L.; Liu, J.; Wang, L.; Tao, T.; Wu, D.; Chen, R. A Review of Global Navigation Satellite System (GNSS)-based Dynamic Monitoring Technologies for Structural Health Monitoring. Remote Sens. 2019, 11, 1001. [Google Scholar] [CrossRef] [Green Version]
- Bock, Y.; Melgar, D.; Crowell, B.W. Real-time strong-motion broadband displacements from collocated GPS and accelerometers. Bull. Seismol. Soc. Am. 2011, 101, 2904–2925. [Google Scholar] [CrossRef]
- Murray, J.R.; Crowell, B.W.; Grapenthin, R.; Hodgkinson, K.; Langbein, J.O.; Melbourne, T.; Melgar, D.; Minson, S.E.; Schmidt, D.A. Development of a geodetic component for the US West Coast earthquake early warning system. Seismol. Res. Lett. 2018, 89, 2322–2336. [Google Scholar] [CrossRef]
- Dahmen, N.; Hohensinn, R.; Clinton, J. Comparison and Combination of GNSS and Strong-Motion Observations: A Case Study of the 2016 Mw 7.0 Kumamoto Earthquake. Bull. Seismol. Soc. Am. 2020, 110, 2647–2660. [Google Scholar] [CrossRef]
- Ohta, Y.; Kobayashi, T.; Tsushima, H.; Miura, S.; Hino, R.; Takasu, T.; Fujimoto, H.; Iinuma, T.; Tachibana, K.; Demachi, T.; et al. Quasi real-time fault model estimation for near-field tsunami forecasting based on RTK-GPS analysis: Application to the 2011 Tohoku-Oki earthquake (Mw 9.0). J. Geophys. Res. Solid Earth 2012, 117, B02311. [Google Scholar] [CrossRef]
- Limpach, P.; Geiger, A.; Raetzo, H. GNSS for deformation and geohazard monitoring in the Swiss Alps. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring (JISDM 2016), Vienna, Austria, 30 March–1 April 2016; Volume 30. [Google Scholar]
- Melgar, D.; Melbourne, T.I.; Crowell, B.W.; Geng, J.; Szeliga, W.; Scrivner, C.; Santillan, M.; Goldberg, D.E. Real-time high-rate GNSS displacements: Performance demonstration during the 2019 Ridgecrest, California, earthquakes. Seismol. Res. Lett. 2020, 91, 1943–1951. [Google Scholar] [CrossRef]
- Ruhl, C.; Melgar, D.; Grapenthin, R.; Allen, R. The value of real-time GNSS to earthquake early warning. Geophys. Res. Lett. 2017, 44, 8311–8319. [Google Scholar] [CrossRef]
- Clinton, J.; Geiger, A.; Häberling, S.; Haslinger, F.; Rothacher, M.; Wiget, A.; Wild, U. The future of national GNSS geomonitoring infrastructures in Switzerland. In Geodätisch-geophysikalische Arbeiten in der Schweiz; Schweizerische Geodätische Kommision: Zurich, Switzerland, 2017. [Google Scholar]
- Laurichesse, D. The CNES Real-time PPP with undifferenced integer ambiguity resolution demonstrator. In Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 19–23 September 2011; pp. 654–662. [Google Scholar]
- u-blox. PointPerfect Product Summary. 2011. Available online: https://content.u-blox.com/sites/default/files/PointPerfect_ProductSummary_UBX-21024758.pdf (accessed on 30 June 2022).
- Rossi, Y.; Tatsis, K.; Awadaljeed, M.; Arbogast, K.; Chatzi, E.; Rothacher, M.; Clinton, J. Kalman filter-based fusion of collocated acceleration, GNSS and rotation data for 6C motion tracking. Sensors 2021, 21, 1543. [Google Scholar] [CrossRef]
- u-blox. u-blox Point Perfect GNSS Augmentation Service. 2022. Available online: https://www.u-blox.com/en/product/pointperfect (accessed on 11 June 2022).
- Laurichesse, D.; Privat, A. An open-source PPP client implementation for the CNES PPP-WIZARD demonstrator. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Dana Point, CA, USA, 26–28 January 2015; pp. 2780–2789. [Google Scholar]
- Ahmed, F.; Vaclavovic, P.; Teferle, F.N.; Douša, J.; Bingley, R.; Laurichesse, D. Comparative analysis of real-time precise point positioning zenith total delay estimates. GPS Solut. 2016, 20, 187–199. [Google Scholar] [CrossRef] [Green Version]
- Kazmierski, K.; Sośnica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2018, 22, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Boisits, J.; Glaner, M.; Weber, R. Regiomontan: A regional high precision ionosphere delay model and its application in precise point positioning. Sensors 2020, 20, 2845. [Google Scholar] [CrossRef]
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined discrete and empirical troposphere mapping functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef]
- Landskron, D.; Böhm, J. Refined discrete and empirical horizontal gradients in VLBI analysis. J. Geod. 2018, 92, 1387–1399. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Mervart, L.; Lukes, Z.; Rocken, C.; Iwabuchi, T. Precise point positioning with ambiguity resolution in real-time. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 397–405. [Google Scholar]
- Zhang, B.; Chen, Y.; Yuan, Y. PPP-RTK based on undifferenced and uncombined observations: Theoretical and practical aspects. J. Geod. 2019, 93, 1011–1024. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P.J.; Zhang, B. Single-frequency integer ambiguity resolution enabled GPS precise point positioning. J. Surv. Eng. 2012, 138, 193–202. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S. Real-time PPP-RTK performance analysis using ionospheric corrections from multi-scale network configurations. Sensors 2020, 20, 3012. [Google Scholar] [CrossRef]
- Banville, S.; Tang, H. Antenna rotation and its effects on kinematic precise point positioning. In Proceedings of the 23rd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2010), Portland, OR, USA, 21–24 September 2010; pp. 2545–2552. [Google Scholar]
- Ruhl, C.J.; Melgar, D.; Geng, J.; Goldberg, D.E.; Crowell, B.W.; Allen, R.M.; Bock, Y.; Barrientos, S.; Riquelme, S.; Baez, J.C.; et al. A global database of strong-motion displacement GNSS recordings and an example application to PGD scaling. Seismol. Res. Lett. 2019, 90, 271–279. [Google Scholar] [CrossRef] [Green Version]
- Melgar, D.; Crowell, B.W.; Melbourne, T.I.; Szeliga, W.; Santillan, M.; Scrivner, C. Noise characteristics of operational real-time high-rate GNSS positions in a large aperture network. J. Geophys. Res. Solid Earth 2020, 125, e2019JB019197. [Google Scholar] [CrossRef]
- Häberling, S. Theoretical and Practical Aspects of High-Rate GNSS Geodetic Observations. Ph.D. Thesis, ETH-Zürich, Zürich, Swiss, 2015. [Google Scholar]
- Michel, C.; Kelevitz, K.; Houlié, N.; Edwards, B.; Psimoulis, P.; Su, Z.; Clinton, J.; Giardini, D. The potential of high-rate GPS for strong ground motion assessment. Bull. Seismol. Soc. Am. 2017, 107, 1849–1859. [Google Scholar] [CrossRef] [Green Version]
- Häberling, S.; Rothacher, M.; Zhang, Y.; Clinton, J.; Geiger, A. Assessment of high-rate GPS using a single-axis shake table. J. Geod. 2015, 89, 697–709. [Google Scholar] [CrossRef]
- Montillet, J.P.; Bos, M.S. Geodetic Time Series Analysis in Earth Sciences; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Williams, S.D.; Bock, Y.; Fang, P.; Jamason, P.; Nikolaidis, R.M.; Prawirodirdjo, L.; Miller, M.; Johnson, D.J. Error analysis of continuous GPS position time series. J. Geophys. Res. Solid Earth 2004, 109, B03412. [Google Scholar] [CrossRef] [Green Version]
- Bos, M.; Fernandes, R.; Williams, S.; Bastos, L. Fast error analysis of continuous GPS observations. J. Geod. 2008, 82, 157–166. [Google Scholar] [CrossRef]
- Kuhlmann, H. Kalman-filtering with coloured measurement noise for deformation analysis. In Proceedings of the 11th FIG Symposium on Deformation Measurements, Santorini, Greece, 25–28 May 2003. [Google Scholar]
- Schmid, R.; Rothacher, M.; Thaller, D.; Steigenberger, P. Absolute phase center corrections of satellite and receiver antennas. GPS Solut. 2005, 9, 283–293. [Google Scholar] [CrossRef]
- Teunissen, P.J. Batch and Recursive Model Validation. In Springer Handbook of Global Navigation Satellite Systems; Teunissen, P.J., Montenbruck, O., Eds.; Springer Handbooks; Springer: Cham, Switzerland, 2017; pp. 687–720. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver | u-blox ZED-F9P Logger | JAVAD SIGMA-G3T |
|---|---|---|
| Frequencies | ||
| - GPS | L1, L2 | L1, L2, L5 |
| - GLONASS | L1, L2 | L1, L2, L3 |
| - Galileo | E1, E5b | E1, E5ab |
| - Beidou | B1, B2 | B1, B2 |
| Max. sampling rate | 20 Hz | 100 Hz |
| Dimensions | 30 mm × 50 mm × 70 mm | 61 mm × 190 mm × 332 mm |
| Power supply | 2.7–3.6 V | 10–30 V |
| Approx. price | 350 USD | 10,000 USD |
| Antenna | u-blox ANN-MB | ArduSimple AS-ANT2B-CAL | JAVAD GrAnt-G3T |
|---|---|---|---|
| Frequencies | |||
| - GPS | L1, L2 | L1, L2 | L1, L2, L5 |
| - GLONASS | L1, L2 | L1, L2 | L1, L2, L3 |
| - Galileo | E1, E5b | E1, E5b, E6 | E1, E5ab |
| - Beidou | B1, B2 | B1, B2, B3 | B1, B2 |
| Weight | 173 g | n/a | 515 g |
| Dimensions | 82 mm × 60 mm × 23 mm | 152 mm × 152 mm × 62 mm | 140 mm × 140 mm × 62 mm |
| Power supply | 2.7–3.6 V | 3–12 V | 10–30 V |
| Approx. price | 60 USD | 90 USD | 1500 USD |
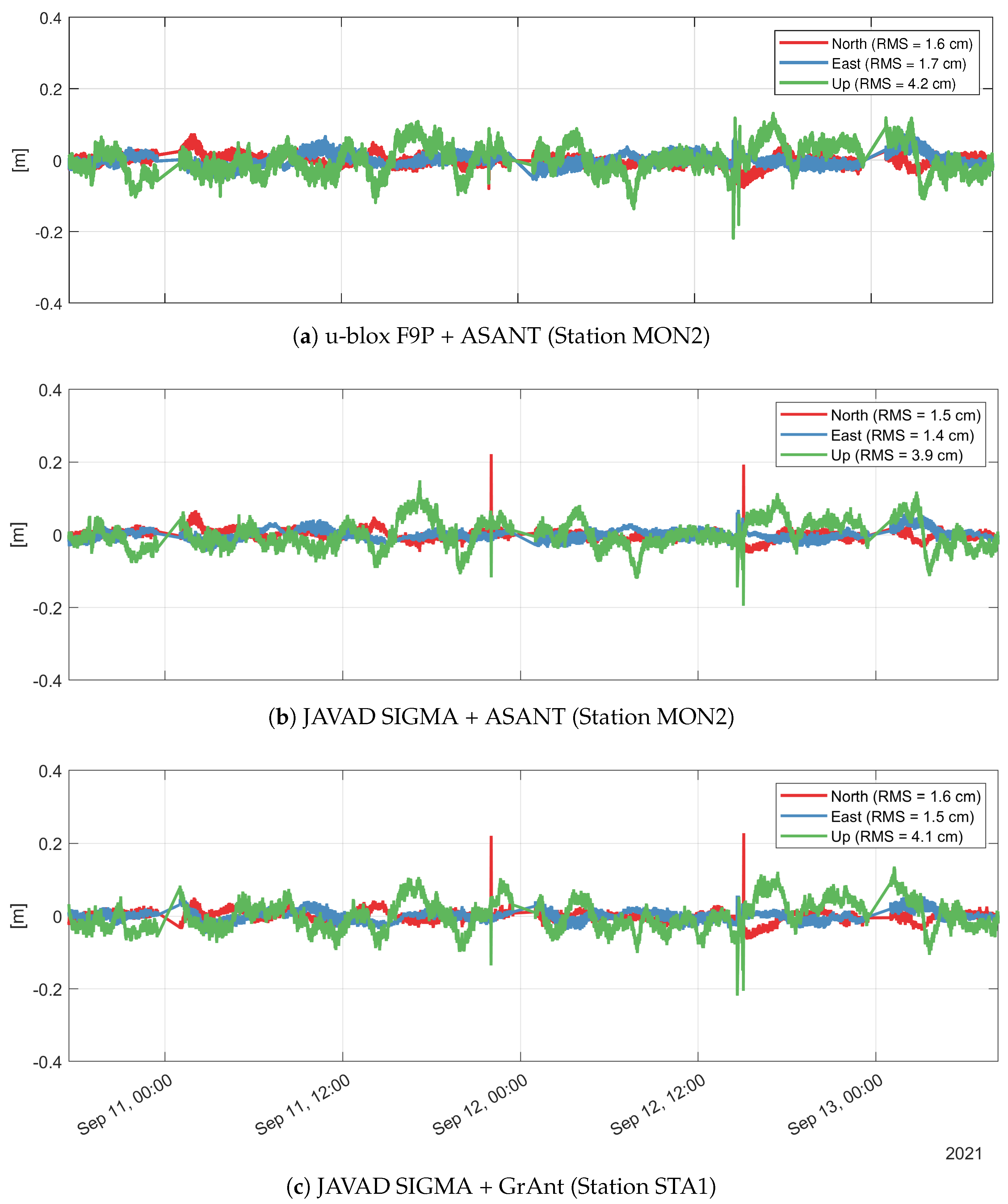
| Receiver + Antenna | Session | Software | North (N) | East (E) | Up (U) |
|---|---|---|---|---|---|
| u-blox + GrAnt | 1 | PPP-Wizard | 2.5 | 2.1 | 4.7 |
| JAVAD + GrAnt | 1 | PPP-Wizard | 3.6 | 1.5 | 4.9 |
| u-blox + ASANT | 2 | PPP-Wizard | 2.1 | 2.0 | 4.6 |
| JAVAD + ASANT | 2 | PPP-Wizard | 2.0 | 1.5 | 3.5 |
| JAVAD + GrAnt | 2 | PPP-Wizard | 2.1 | 1.7 | 3.8 |
| u-blox + ASANT | 2 | raPPPid | 1.6 | 1.7 | 4.2 |
| JAVAD + ASANT | 2 | raPPPid | 1.5 | 1.4 | 3.9 |
| JAVAD + ASANT | 2 | raPPPid | 1.6 | 1.5 | 4.1 |
| Average | 2.1 | 1.7 | 4.2 | ||
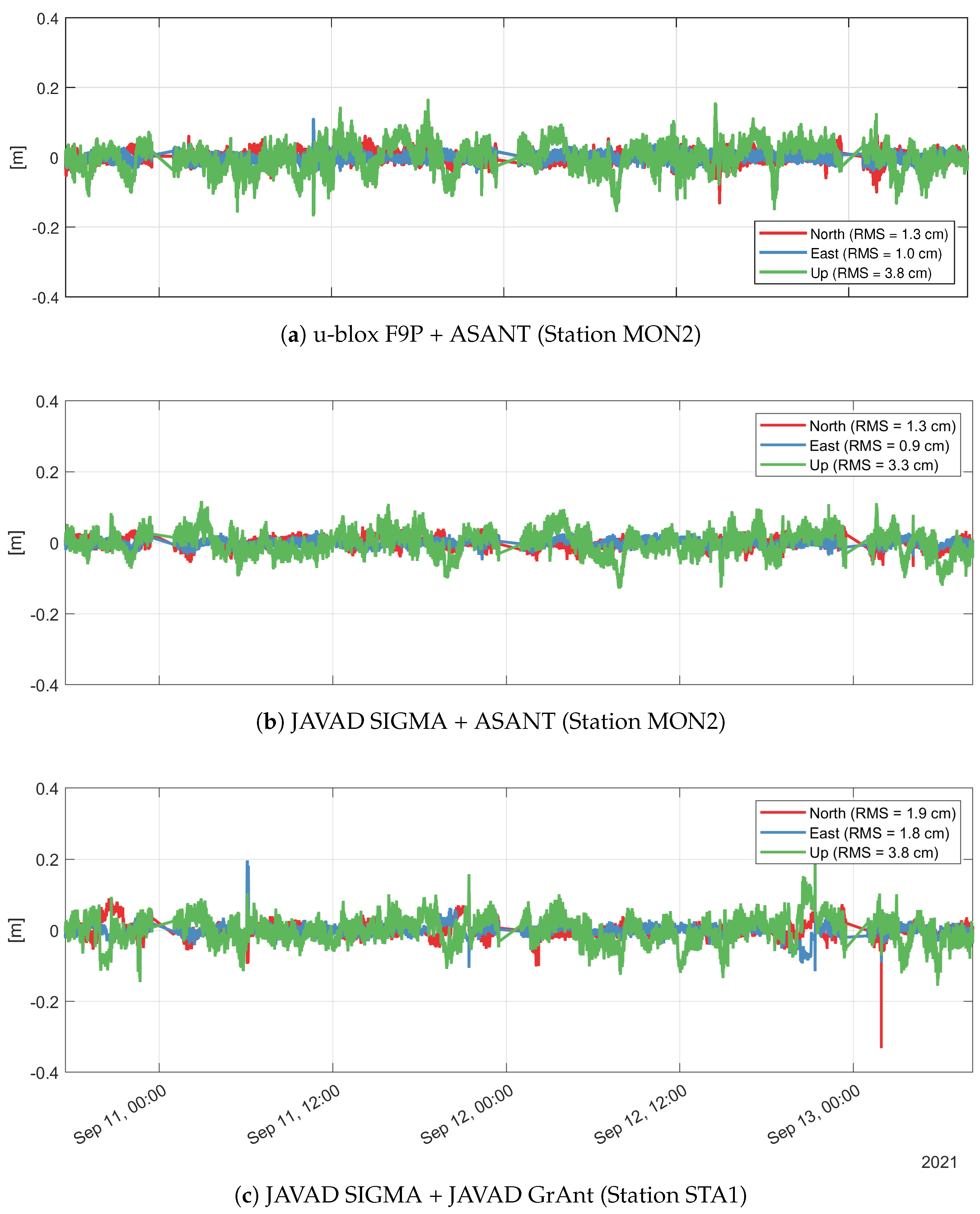
| Receiver + Antenna | Session | Software | North (N) | East (E) | Up (U) |
|---|---|---|---|---|---|
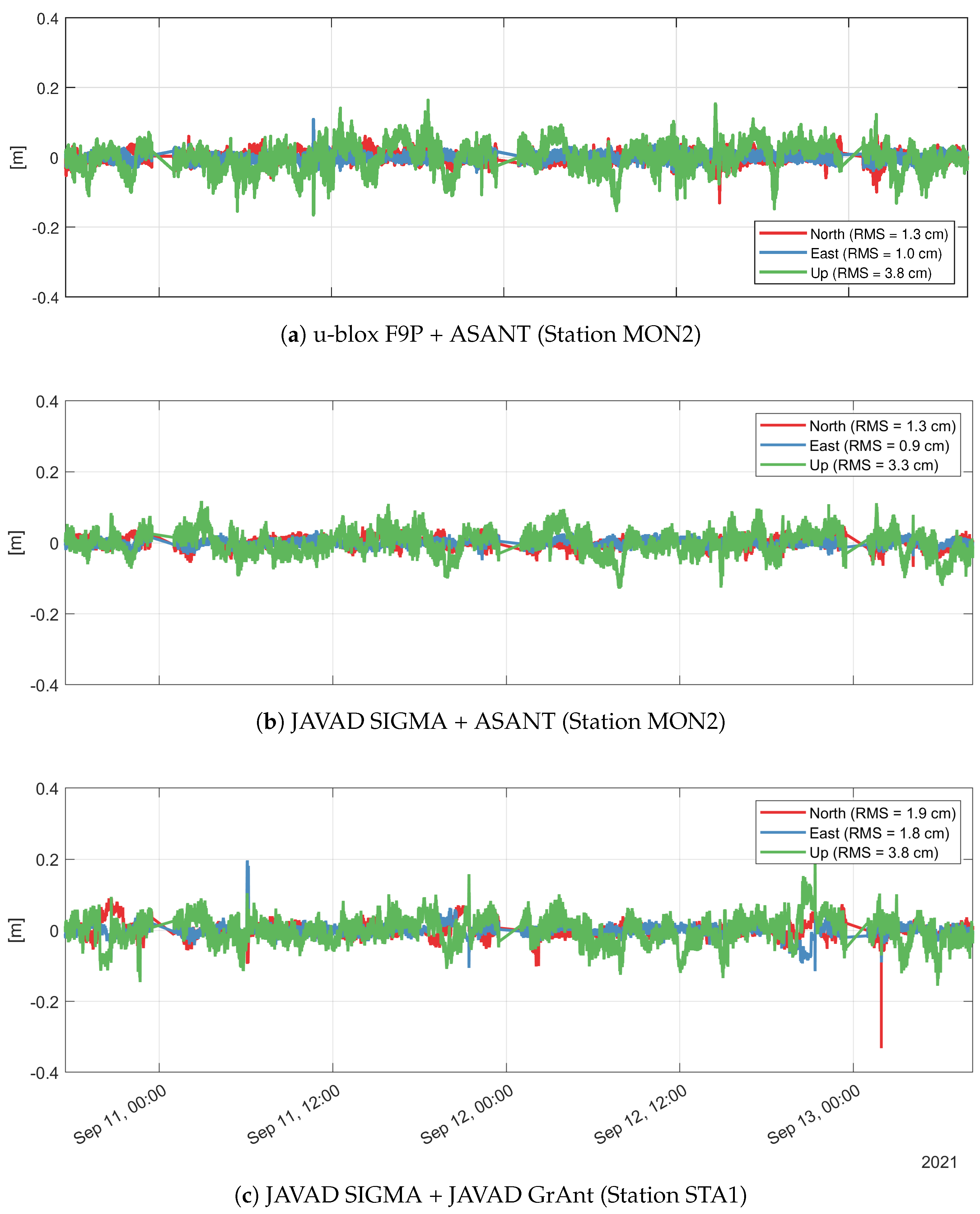
| u-blox + ASANT | 2 | raPPPid | 1.3 | 1.0 | 3.8 |
| JAVAD + ASANT | 2 | raPPPid | 1.3 | 0.9 | 3.3 |
| JAVAD + GrAnt | 2 | raPPPid | 1.9 | 1.8 | 3.8 |
| Average | 1.5 | 1.2 | 3.6 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hohensinn, R.; Stauffer, R.; Glaner, M.F.; Herrera Pinzón, I.D.; Vuadens, E.; Rossi, Y.; Clinton, J.; Rothacher, M. Low-Cost GNSS and Real-Time PPP: Assessing the Precision of the u-blox ZED-F9P for Kinematic Monitoring Applications. Remote Sens. 2022, 14, 5100. https://doi.org/10.3390/rs14205100
Hohensinn R, Stauffer R, Glaner MF, Herrera Pinzón ID, Vuadens E, Rossi Y, Clinton J, Rothacher M. Low-Cost GNSS and Real-Time PPP: Assessing the Precision of the u-blox ZED-F9P for Kinematic Monitoring Applications. Remote Sensing. 2022; 14(20):5100. https://doi.org/10.3390/rs14205100
Chicago/Turabian StyleHohensinn, Roland, Raphael Stauffer, Marcus Franz Glaner, Iván Darío Herrera Pinzón, Elie Vuadens, Yara Rossi, John Clinton, and Markus Rothacher. 2022. "Low-Cost GNSS and Real-Time PPP: Assessing the Precision of the u-blox ZED-F9P for Kinematic Monitoring Applications" Remote Sensing 14, no. 20: 5100. https://doi.org/10.3390/rs14205100
APA StyleHohensinn, R., Stauffer, R., Glaner, M. F., Herrera Pinzón, I. D., Vuadens, E., Rossi, Y., Clinton, J., & Rothacher, M. (2022). Low-Cost GNSS and Real-Time PPP: Assessing the Precision of the u-blox ZED-F9P for Kinematic Monitoring Applications. Remote Sensing, 14(20), 5100. https://doi.org/10.3390/rs14205100