
Characterizing Forest Cover and Landscape Pattern Using Multi-Source Remote Sensing Data with Ensemble Learning

Abstract
:1. Introduction
2. Materials and Methods
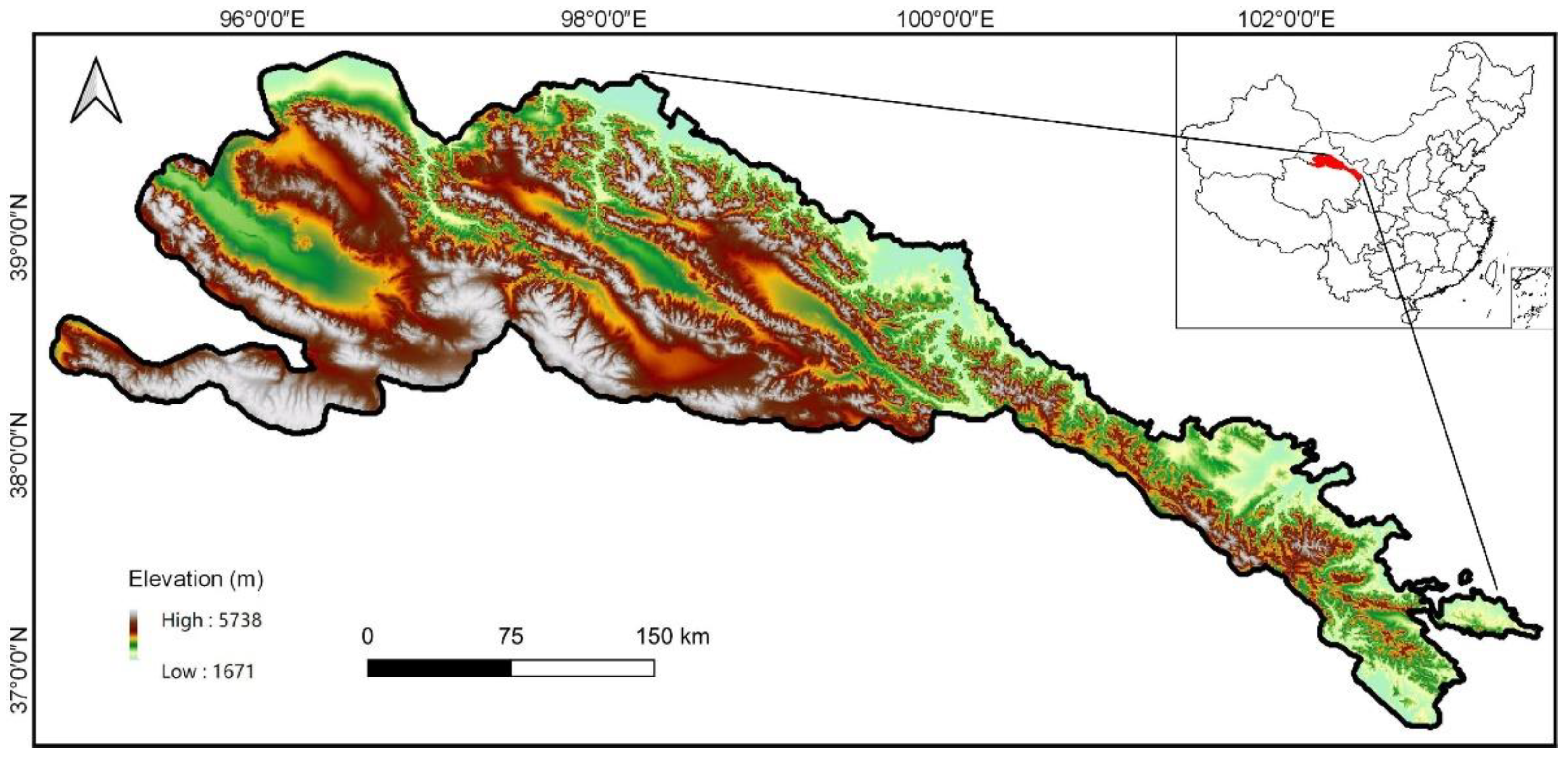
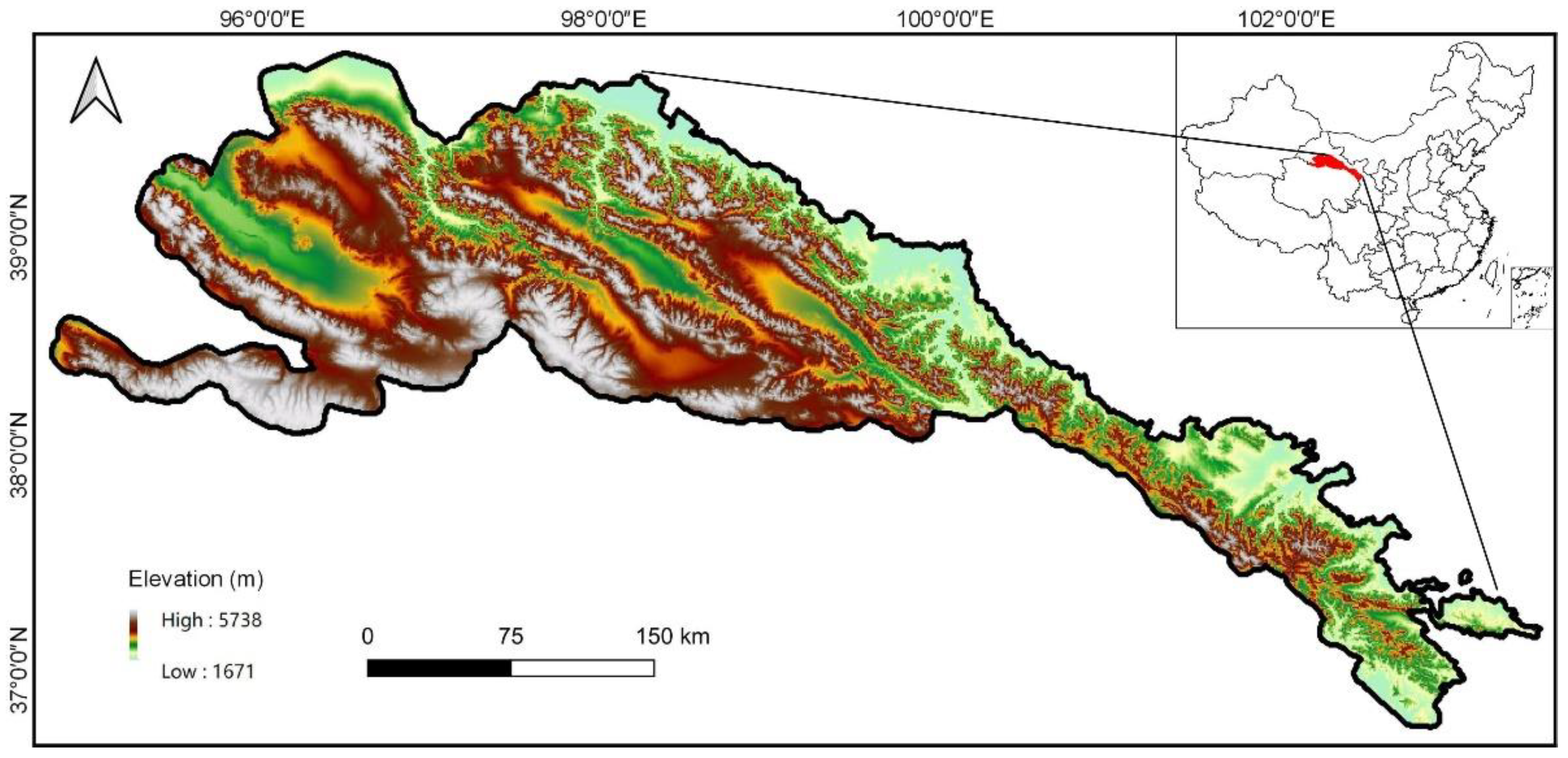
2.1. Study Area
2.2. Data Sources
2.2.1. Sentinel Imagery
2.2.2. Google Earth Images
2.2.3. Elevation Data
2.2.4. Land-Cover Products
2.2.5. Climate and Human Disturbance Data
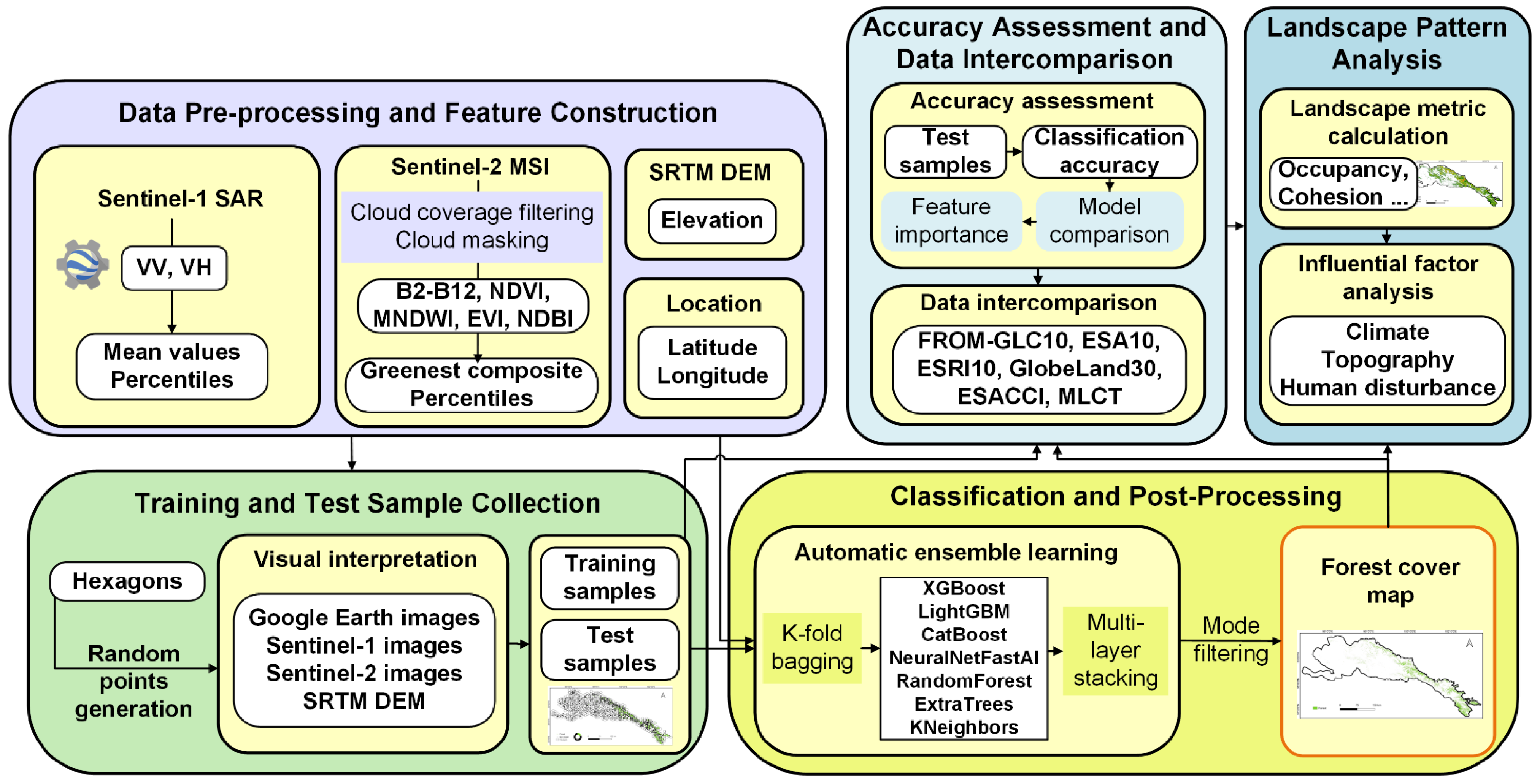
2.3. Forest-Cover Mapping
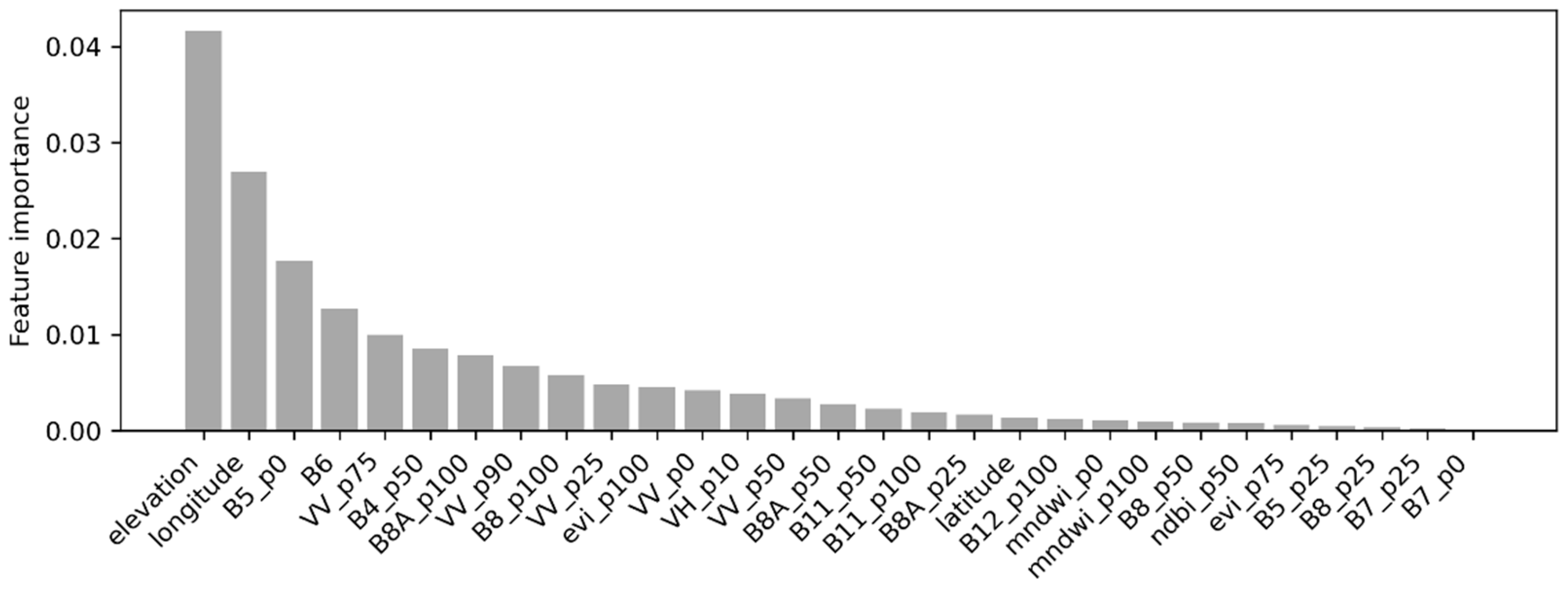
2.3.1. Feature Construction
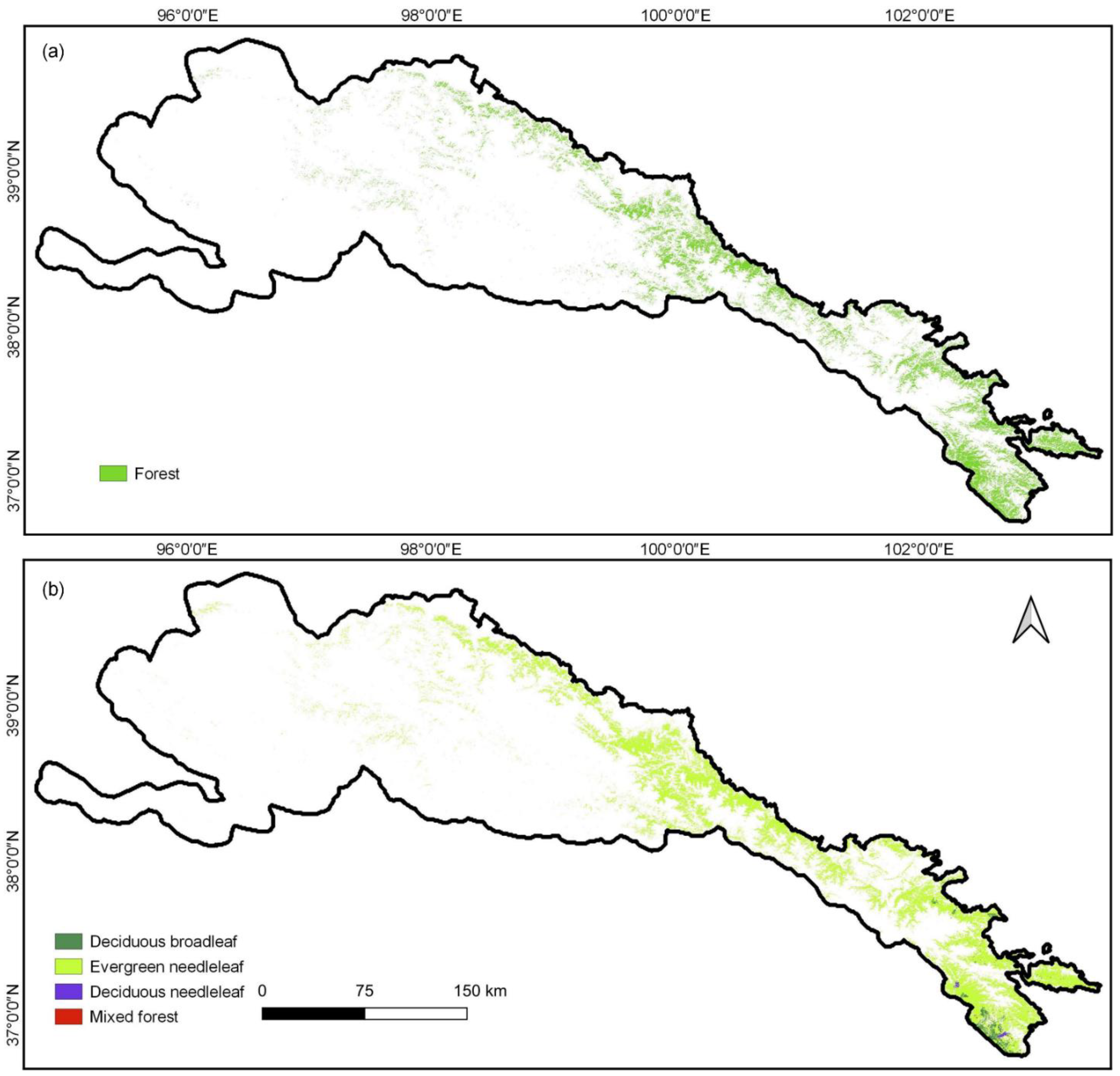
2.3.2. Classification System
2.3.3. Sample Collection
2.3.4. Classification and Post-Processing
2.3.5. Accuracy Assessment and Data Intercomparison
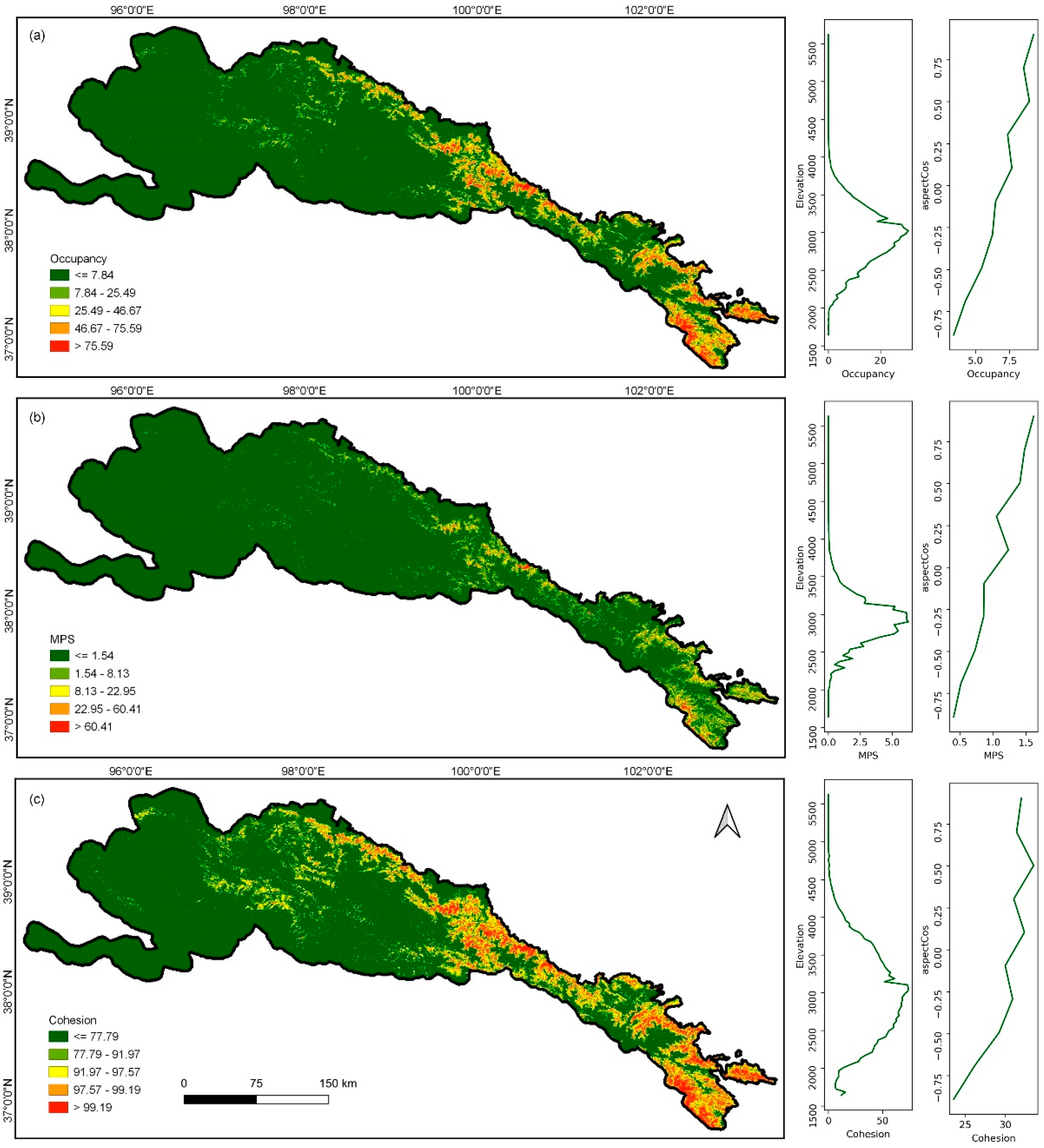
2.4. Landscape Pattern Analysis
3. Results
3.1. Optimal Classifier and Feature for Forest Classification
3.2. Reliability of Forest Mapping Result
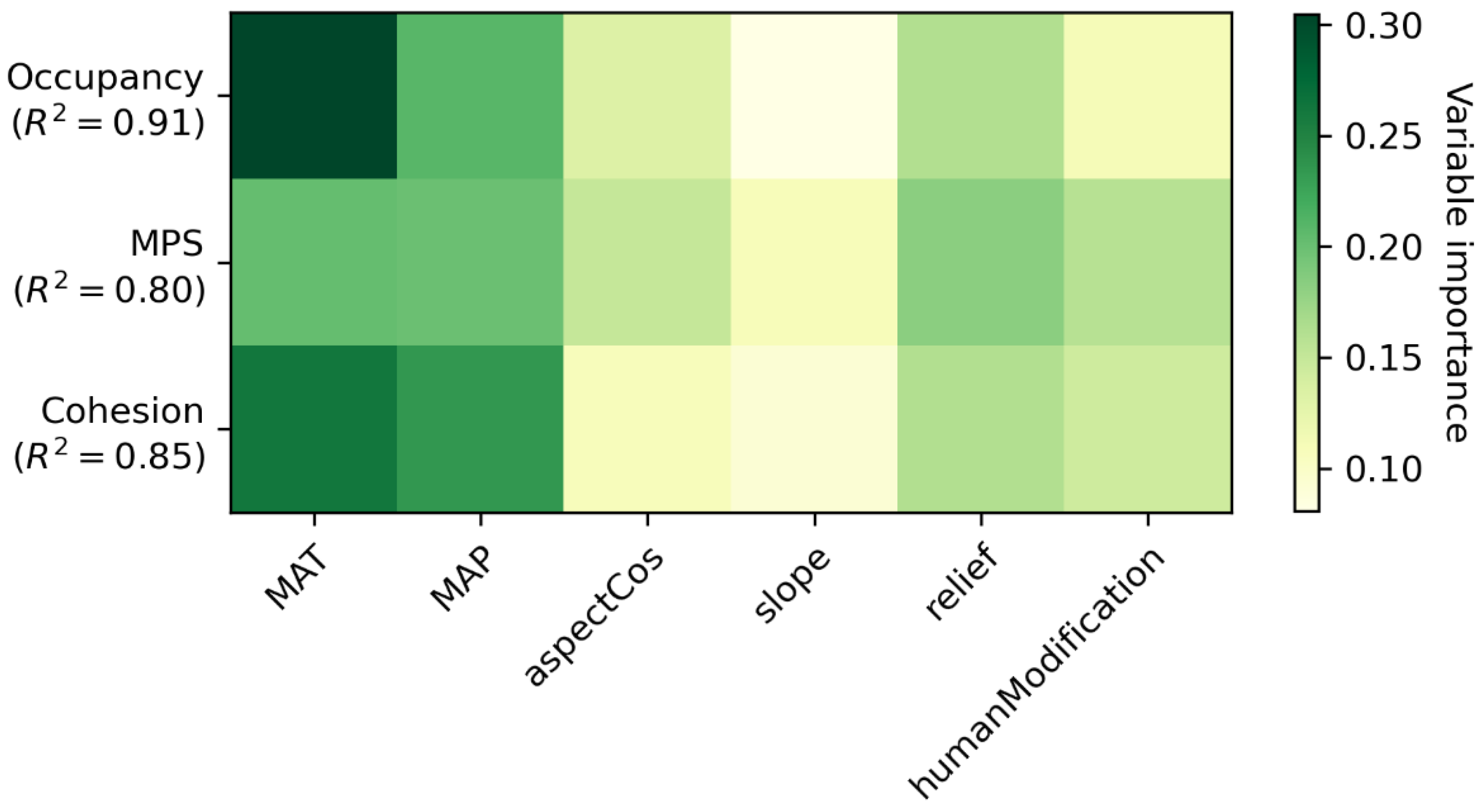
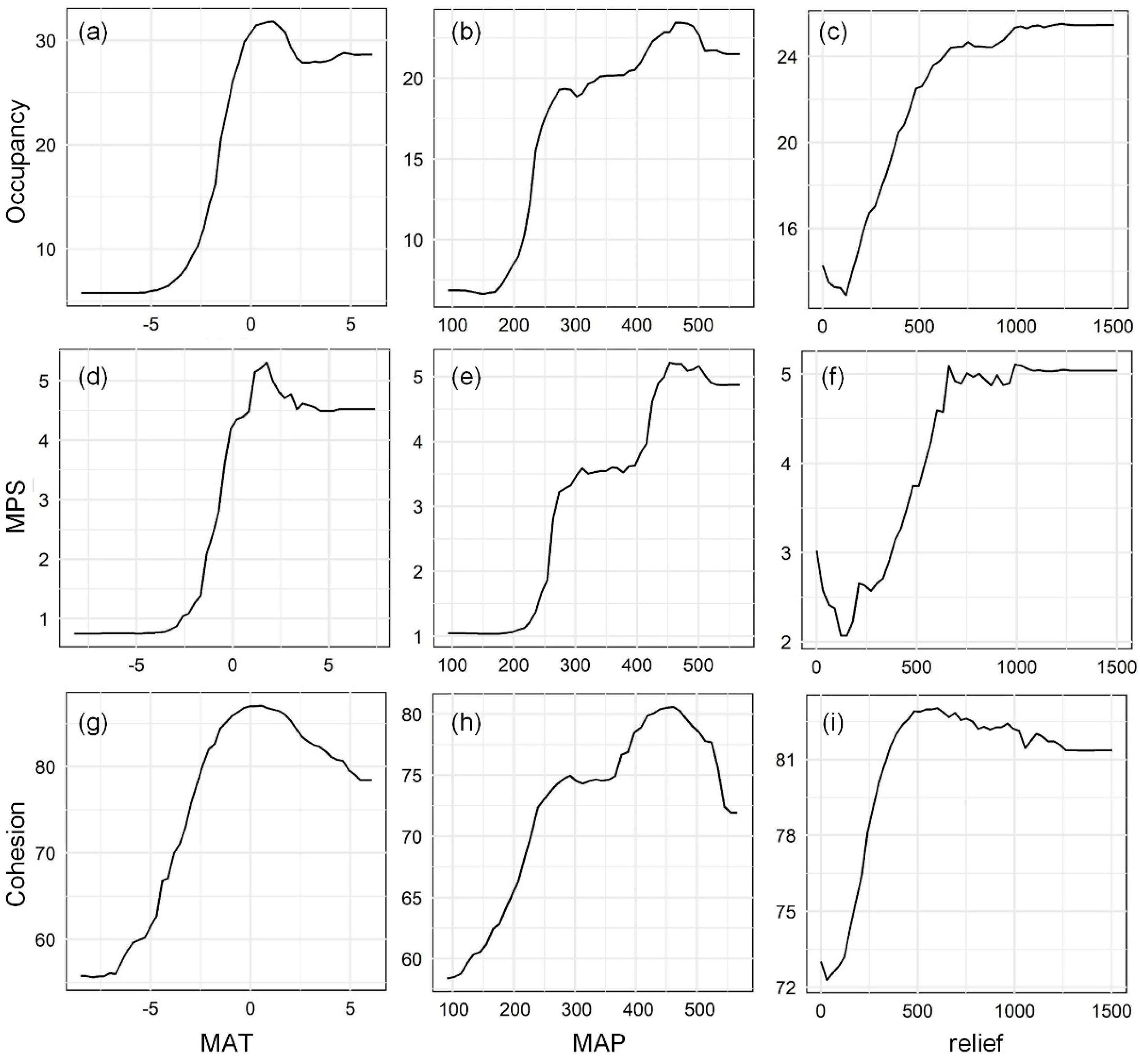
3.3. Environmental Determents of Forest Landscape Pattern
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-century Forest Cover Change. Science 2013, 342, 850. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Harris, N.L.; Gibbs, D.A.; Baccini, A.; Birdsey, R.A.; de Bruin, S.; Farina, M.; Fatoyinbo, L.; Hansen, M.C.; Herold, M.; Houghton, R.A.; et al. Global Maps of Twenty-First Century Forest Carbon Fluxes. Nat. Clim. Chang. 2021, 11, 234–240. [Google Scholar] [CrossRef]
- FAO; UNEP. The State of the World’s Forests 2020. Forests, Biodiversity and People; Reports; FAO: Rome, Italy, 2020; pp. 10–15. [Google Scholar] [CrossRef]
- Bonan, G.B. Forests and Climate Change: Forcings, Feedbacks, and the Climate Benefits of Forests. Science 2008, 320, 1444–1449. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chazdon Robin, L. Beyond Deforestation: Restoring Forests and Ecosystem Services on Degraded Lands. Science 2008, 320, 1458–1460. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scheffer, M.; Carpenter, S.; Foley, J.A.; Folke, C.; Walker, B. Catastrophic Shifts in Ecosystems. Nature 2001, 413, 591–596. [Google Scholar] [CrossRef]
- Qin, Y.; Xiao, X.; Wigneron, J.-P.; Ciais, P.; Brandt, M.; Fan, L.; Li, X.; Crowell, S.; Wu, X.; Doughty, R.; et al. Carbon Loss from Forest Degradation Exceeds that from Deforestation in the Brazilian Amazon. Nat. Clim. Chang. 2021, 11, 442–448. [Google Scholar] [CrossRef]
- EEA. High Resolution Layer: Forest Type (FTY). 2015. Available online: https://land.copernicus.eu/pan-european/high-resolution-layers/forests/forest-type-1/status-maps/2015?tab=metadata (accessed on 27 August 2022).
- EEA. High Resolution Layer Forest, Dominant Leaf Type. 2018. Available online: https://land.copernicus.eu/pan-european/high-resolution-layers/forests/dominant-leaf-type/status-maps/dominant-leaf-type-2018 (accessed on 27 August 2022).
- Ma, M.; Liu, J.; Liu, M.; Zeng, J.; Li, Y. Tree Species Classification Based on Sentinel-2 Imagery and Random Forest Classifier in the Eastern Regions of the Qilian Mountains. Forests 2021, 12, 1736. [Google Scholar] [CrossRef]
- Hemmerling, J.; Pflugmacher, D.; Hostert, P. Mapping Temperate Forest Tree Species Using Dense Sentinel-2 Time Series. Remote Sens. Environ. 2021, 267, 112743. [Google Scholar] [CrossRef]
- Hamrouni, Y.; Paillassa, E.; Chéret, V.; Monteil, C.; Sheeren, D. Sentinel-2 Poplar Index for Operational Mapping of Poplar Plantations over Large Areas. Remote Sens. 2022, 14, 3975. [Google Scholar] [CrossRef]
- Yu, H.; Ni, W.; Zhang, Z.; Sun, G.; Zhang, Z. Regional Forest Mapping over Mountainous Areas in Northeast China Using Newly Identified Critical Temporal Features of Sentinel-1 Backscattering. Remote Sens. 2020, 12, 1485. [Google Scholar] [CrossRef]
- Dostálová, A.; Lang, M.; Ivanovs, J.; Waser, L.T.; Wagner, W. European Wide Forest Classification Based on Sentinel-1 Data. Remote Sens. 2021, 13, 337. [Google Scholar] [CrossRef]
- De Luca, G.; MN Silva, J.; Di Fazio, S.; Modica, G. Integrated Use of Sentinel-1 and Sentinel-2 Data and Open-Source Machine Learning Algorithms for Land Cover Mapping in a Mediterranean Region. Eur. J. Remote Sens. 2022, 55, 52–70. [Google Scholar] [CrossRef]
- Mngadi, M.; Odindi, J.; Peerbhay, K.; Mutanga, O. Examining the Effectiveness of Sentinel-1 and 2 Imagery for Commercial Forest Species Mapping. Geocarto Int. 2021, 36, 1–12. [Google Scholar] [CrossRef]
- Ghorbanian, A.; Zaghian, S.; Asiyabi, R.M.; Amani, M.; Mohammadzadeh, A.; Jamali, S. Mangrove Ecosystem Mapping Using Sentinel-1 and Sentinel-2 Satellite Images and Random Forest Algorithm in Google Earth Engine. Remote Sens. 2021, 13, 2565. [Google Scholar] [CrossRef]
- Waser, L.T.; Rüetschi, M.; Psomas, A.; Small, D.; Rehush, N. Mapping Dominant Leaf Type based on Combined Sentinel-1/-2 Data—Challenges for Mountainous Countries. ISPRS J. Photogramm. Remote Sens. 2021, 180, 209–226. [Google Scholar] [CrossRef]
- Zhang, W.; Brandt, M.; Wang, Q.; Prishchepov, A.V.; Tucker, C.J.; Li, Y.; Lyu, H.; Fensholt, R. From Woody Cover to Woody Canopies: How Sentinel-1 and Sentinel-2 Data Advance the Mapping of Woody Plants in Savannas. Remote Sens. Environ. 2019, 234, 111465. [Google Scholar] [CrossRef]
- Pulella, A.; Aragão Santos, R.; Sica, F.; Posovszky, P.; Rizzoli, P. Multi-Temporal Sentinel-1 Backscatter and Coherence for Rainforest Mapping. Remote Sens. 2020, 12, 847. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Tian, X.; Chai, G.; Zhang, X.; Chen, E. A New CBAM-P-Net Model for Few-Shot Forest Species Classification Using Airborne Hyperspectral Images. Remote Sens. 2021, 13, 1269. [Google Scholar] [CrossRef]
- D’Amico, G.; Francini, S.; Giannetti, F.; Vangi, E.; Travaglini, D.; Chianucci, F.; Mattioli, W.; Grotti, M.; Puletti, N.; Corona, P.; et al. A deep learning approach for automatic mapping of poplar plantations using Sentinel-2 imagery. GIScience Remote Sens. 2021, 58, 1352–1368. [Google Scholar] [CrossRef]
- Liu, H.; Li, J.; He, L.; Wang, Y. Superpixel-Guided Layer-Wise Embedding CNN for Remote Sensing Image Classification. Remote Sens. 2019, 11, 174. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Gong, P.; Wang, J.; Wang, X.; Ning, G.; Xu, B. Production of Global Daily Seamless Data Cubes and Quantification of Global Land Cover Change from 1985 to 2020-iMap World 1.0. Remote Sens. Environ. 2021, 258, 112364. [Google Scholar] [CrossRef]
- Grabska, E.; Frantz, D.; Ostapowicz, K. Evaluation of Machine Learning Algorithms for Forest Stand Species Mapping Using Sentinel-2 Imagery and Environmental Data in the Polish Carpathians. Remote Sens. Environ. 2020, 251, 112103. [Google Scholar] [CrossRef]
- Fahrig, L. Habitat Fragmentation: A Long and Tangled Tale. Glob. Ecol. Biogeogr. 2019, 28, 33–41. [Google Scholar] [CrossRef]
- Brinck, K.; Fischer, R.; Groeneveld, J.; Lehmann, S.; Dantas De Paula, M.; Pütz, S.; Sexton, J.O.; Song, D.; Huth, A. High Resolution Analysis of Tropical Forest Fragmentation and Its Impact on the Global Carbon Cycle. Nat. Commun. 2017, 8, 14855. [Google Scholar] [CrossRef] [Green Version]
- Haddad Nick, M.; Brudvig Lars, A.; Clobert, J.; Davies Kendi, F.; Gonzalez, A.; Holt Robert, D.; Lovejoy Thomas, E.; Sexton Joseph, O.; Austin Mike, P.; Collins Cathy, D.; et al. Habitat Fragmentation and Its Lasting Impact on Earth’s Ecosystems. Sci. Adv. 2015, 1, e1500052. [Google Scholar] [CrossRef] [Green Version]
- Potapov, P.; Hansen Matthew, C.; Laestadius, L.; Turubanova, S.; Yaroshenko, A.; Thies, C.; Smith, W.; Zhuravleva, I.; Komarova, A.; Minnemeyer, S.; et al. The Last Frontiers of Wilderness: Tracking Loss of Intact Forest Landscapes from 2000 to 2013. Sci. Adv. 2017, 3, e1600821. [Google Scholar] [CrossRef] [Green Version]
- Taubert, F.; Fischer, R.; Groeneveld, J.; Lehmann, S.; Müller, M.S.; Rödig, E.; Wiegand, T.; Huth, A. Global Patterns of Tropical Forest Fragmentation. Nature 2018, 554, 519–522. [Google Scholar] [CrossRef]
- Fischer, R.; Taubert, F.; Müller Michael, S.; Groeneveld, J.; Lehmann, S.; Wiegand, T.; Huth, A. Accelerated Forest Fragmentation Leads to Critical Increase in Tropical Forest Edge Area. Sci. Adv. 2021, 7, eabg7012. [Google Scholar] [CrossRef]
- Myers, N.; Mittermeier, R.A.; Mittermeier, C.G.; da Fonseca, G.A.B.; Kent, J. Biodiversity Hotspots for Conservation Priorities. Nature 2000, 403, 853–858. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Wang, Y.; Wang, S.; Webb, A.A.; Yu, P.; Liu, X.; Zhang, X. Spatial Distribution of Qinghai Spruce Forests and the Thresholds of Influencing Factors in a Small Catchment, Qilian Mountains, Northwest China. Sci. Rep. 2017, 7, 5561. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zongxing, L.; Qi, F.; Zongjie, L.; Xufeng, W.; Juan, G.; Baijuan, Z.; Yuchen, L.; Xiaohong, D.; Jian, X.; Wende, G.; et al. Reversing Conflict between Humans and the Environment—The Experience in the Qilian Mountains. Renew. Sustain. Energy Rev. 2021, 148, 111333. [Google Scholar] [CrossRef]
- Geng, L.; Che, T.; Wang, X.; Wang, H. Detecting Spatiotemporal Changes in Vegetation with the BFAST Model in the Qilian Mountain Region during 2000–2017. Remote Sens. 2019, 11, 103. [Google Scholar] [CrossRef] [Green Version]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef] [Green Version]
- Gong, P.; Liu, H.; Zhang, M.; Li, C.; Wang, J.; Huang, H.; Clinton, N.; Ji, L.; Li, W.; Bai, Y.; et al. Stable Classification with Limited Sample: Transferring a 30-m resolution Sample Set Collected in 2015 to Mapping 10-m Resolution Global Land Cover in 2017. Sci. Bull. 2019, 64, 370–373. [Google Scholar] [CrossRef] [Green Version]
- Zanaga, D.; Van De Kerchove, R.; De Keersmaecker, W.; Souverijns, N.; Brockmann, C.; Quast, R.; Wevers, J.; Grosu, A.; Paccini, A.; Vergnaud, S.; et al. ESA WorldCover 10 m 2020 v100. 2021. Available online: https://zenodo.org/record/5571936 (accessed on 1 May 2022).
- Karra, K.; Kontgis, C.; Statman-Weil, Z.; Mazzariello, J.C.; Mathis, M.; Brumby, S.P. Global Land Use/Land Cover with Sentinel 2 and Deep Learning. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 4704–4707. [Google Scholar]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M. Global Land Cover Mapping at 30 m Resolution: A POK-Based Operational Approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef] [Green Version]
- ESA. Land Cover CCI Product User Guide Version 2. Technical Reports. 2017. Available online: Maps.elie.ucl.ac.be/CCI/viewer/download/ESACCI-LC-Ph2-PUGv2_2.0.pdf (accessed on 1 May 2022).
- Sulla-Menashe, D.; Gray, J.M.; Abercrombie, S.P.; Friedl, M.A. Hierarchical Mapping of Annual Global Land Cover 2001 to Present: The MODIS Collection 6 Land Cover product. Remote Sens. Environ. 2019, 222, 183–194. [Google Scholar] [CrossRef]
- Fick, S.E.; Hijmans, R.J. WorldClim 2: New 1-km Spatial Resolution Climate Surfaces for Global Land Areas. Int. J. Climatol. 2017, 37, 4302–4315. [Google Scholar] [CrossRef]
- Kennedy, C.M.; Oakleaf, J.R.; Theobald, D.M.; Baruch-Mordo, S.; Kiesecker, J. Managing the Middle: A Shift in Conservation Priorities based on the Global Human Modification Gradient. Glob. Chang. Biol. 2019, 25, 811–826. [Google Scholar] [CrossRef]
- Rouse, J.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Liu, H.Q.; Huete, A. A Feedback based Modification of the NDVI to Minimize Canopy Background and Atmospheric Noise. IEEE Trans. Geosci. Remote Sens. 1995, 33, 457–465. [Google Scholar] [CrossRef]
- Xu, H. Modification of Normalised Difference Water Index (NDWI) to Enhance Open Water Features in Remotely Sensed Imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of Normalized Difference Built-up Index in Automatically Mapping Urban Areas from TM Imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Liu, H.; Gong, P.; Wang, J.; Clinton, N.; Bai, Y.; Liang, S. Annual Dynamics of Global Land Cover and its Long-Term Changes from 1982 to 2015. Earth Syst. Sci. Data 2020, 12, 1217–1243. [Google Scholar] [CrossRef]
- Loveland, T.R.; Reed, B.C.; Brown, J.F.; Ohlen, D.O.; Zhu, Z.; Yang, L.; Merchant, J.W. Development of a Global Land Cover Characteristics Database and IGBP DISCover from 1 km AVHRR Data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, P.; Yu, L.; Hu, L.; Li, X.; Li, C.; Zhang, H.; Zheng, Y.; Wang, J.; Zhao, Y.; et al. Towards a Common Validation Sample Set for Global Land-Cover Mapping. Int. J. Remote Sens. 2014, 35, 4795–4814. [Google Scholar] [CrossRef]
- Erickson, N.; Mueller, J.; Shirkov, A.; Zhang, H.; Larroy, P.; Li, M.; Smola, A. AutoGluon-Tabular: Robust and Accurate AutoML for Structured Data. arXiv 2020, arXiv:2003.06505. [Google Scholar] [CrossRef]
- Cohen, J. A Coefficient of Agreement for Nominal Scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- McGarigal, K. FRAGSTATS: Spatial Pattern Analysis Program for Quantifying Landscape Structure; US Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, ON, USA, 1995; Volume 351. [Google Scholar]
- Evans, J.S.; Murphy, M.A.; Holden, Z.A.; Cushman, S.A. Modeling Species Distribution and Change Using Random Forest. In Predictive Species and Habitat Modeling in Landscape Ecology: Concepts and Applications; Drew, C.A., Wiersma, Y.F., Huettmann, F., Eds.; Springer: New York, NY, USA, 2011; pp. 139–159. [Google Scholar]
- Verhegghen, A.; Kuzelova, K.; Syrris, V.; Eva, H.; Achard, F. Mapping Canopy Cover in African Dry Forests from the Combined Use of Sentinel-1 and Sentinel-2 Data: Application to Tanzania for the Year 2018. Remote Sens. 2022, 14, 1522. [Google Scholar] [CrossRef]
- McGarigal, K. Landscape Pattern Metrics. In Wiley StatsRef: Statistics Reference Online; Balakrishnan, N., Colton, T., Everitt, B., Piegorsch, W., Ruggeri, F., Teugels, J.L., Eds.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2014. [Google Scholar]
- Wang, X.; Blanchet, F.G.; Koper, N. Measuring Habitat Fragmentation: An Evaluation of Landscape Pattern Metrics. Methods Ecol. Evol. 2014, 5, 634–646. [Google Scholar] [CrossRef]
- Chambers, C.L.; Cushman, S.A.; Medina-Fitoria, A.; Martínez-Fonseca, J.; Chávez-Velásquez, M. Influences of Scale on Bat Habitat Relationships in a Forested Landscape in Nicaragua. Landsc. Ecol. 2016, 31, 1299–1318. [Google Scholar] [CrossRef]
- Martins, V.S.; Kaleita, A.L.; Gelder, B.K.; da Silveira, H.L.F.; Abe, C.A. Exploring Multiscale Object-Based Convolutional Neural Network (Multi-OCNN) for Remote Sensing Image Classification at High Spatial Resolution. ISPRS J. Photogramm. Remote Sens. 2020, 168, 56–73. [Google Scholar] [CrossRef]
- Giannetti, F.; Barbati, A.; Mancini, L.D.; Travaglini, D.; Bastrup-Birk, A.; Canullo, R.; Nocentini, S.; Chirici, G. European Forest Types: Toward an Automated Classification. Ann. For. Sci. 2018, 75, 6. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Liu, H.; Xu, C.; Shi, L.; Zhu, X.; Qi, Y.; He, W. Old-Growth Forests Show Low Canopy Resilience to Droughts at the Southern Edge of the Taiga. Glob. Chang. Biol. 2021, 27, 2392–2402. [Google Scholar] [CrossRef] [PubMed]
- Gudex-Cross, D.; Pontius, J.; Adams, A. Enhanced Forest Cover Mapping Using Spectral Unmixing and Object-Based Classification of Multi-Temporal Landsat Imagery. Remote Sens. Environ. 2017, 196, 193–204. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Data Source | Spatial Resolution | Time |
|---|---|---|---|
| SAR | Sentinel-1 GRD | 10 m | 2021 |
| MSI | Sentinel-2 Level-2 SR | 10-20 m | 2021 |
| Google Earth images | Google Earth images | <1 m (highest) | 2020–2021 (most) |
| Topography | SRTM DEM | 30 m | 2000 |
| Land cover | FROM-GLC10 | 10 m | 2017 |
| ESA10 | 10 m | 2020 | |
| ESRI10 | 10 m | 2020 | |
| Globeland30 | 30 m | 2020 | |
| ESACCI | 300 m | 2020 | |
| MLCT | 500 m | 2016 | |
| Climate | WorldClim | ~1 km | 1970–2000 |
| Human disturbance | gHM | ~1 km | 2016 |
| Data source | Band | Description | Feature |
|---|---|---|---|
| Sentinel-1 SAR | VV | Single co-polarization, vertical transmit/vertical receive | Mean values and percentiles (0, 10, 25, 50, 75, 90, and 100) |
| VH | Dual-band cross-polarization, vertical transmit/horizontal receive | ||
| Sentinel-2 MSI | B2 | Blue | Greenest composite values and percentiles (0, 10, 25, 50, 75, 90, and 100) |
| B3 | Green | ||
| B4 | Red | ||
| B5 | Red Edge 1 | ||
| B6 | Red Edge 2 | ||
| B7 | Red Edge 3 | ||
| B8 | NIR | ||
| B8A | Red Edge 4 | ||
| B11 | SWIR 1 | ||
| B12 | SWIR 2 | ||
| NDVI | (B8 − B4)/(B8 + B4) | ||
| EVI | 2.5 × (B8 − B4)/(B8 + B4 × 6 − B2 × 7.5 + 1) | ||
| MNDWI | (B3 − B11)/(B3 + B11) | ||
| NDBI | (B11 − B8)/(B11 + B8) | ||
| SRTM DEM | Elevation | ||
| Location | Longitude | ||
| Latitude | |||
| Landscape Metric | Description | Note |
|---|---|---|
| Percentage of landscape (Occupancy) | Occupancy = (100) | = number of forest patches = area of forest patch () A = total landscape area () = perimeter of forest patch (km) |
| Mean patch size (MPS) | MPS = (100) () | |
| Patch cohesion index (Cohesion) | Cohesion = (100) |
| Factor | Variable | Description | Data Source |
|---|---|---|---|
| Climate | MAT | Mean annual temperature (°C) | WorldClim |
| MAP | Mean annual precipitation () | ||
| Topography | slope | (°) | SRTM DEM |
| aspectCos | aspectCos = cosine(aspect) | ||
| relief | relief = (m), where and are maximum, minimum values of elevation within a 3 × 3 range, respectively. | ||
| Human disturbance | humanModification | The indicator of human modification | gHM |
| Classifier | Overall Accuracy | Kappa | Weighted F1 | Training Time (s) | Prediction Time (s) | Stack Level |
|---|---|---|---|---|---|---|
| WeightedEnsemble_L3 | 95.44% | 0.8366 | 95.35% | 3.1285 | 0.0023 | 3 |
| LightGBM_BAG_L2 | 95.35% | 0.8342 | 95.23% | 97.7112 | 1.5135 | 2 |
| ExtraTreesGini_BAG_L2 | 95.20% | 0.8327 | 95.19% | 1.0046 | 0.1096 | 2 |
| XGBoost_BAG_L2 | 95.15% | 0.8321 | 95.07% | 271.8431 | 6.8048 | 2 |
| RandomForestGini_BAG_L2 | 95.11% | 0.8315 | 95.07% | 6.1541 | 0.1130 | 2 |
| NeuralNetFastAI_BAG_L2 | 95.08% | 0.8302 | 95.11% | 2584.8642 | 31.8396 | 2 |
| XGBoost_BAG_L1 | 95.08% | 0.8300 | 95.06% | 568.8886 | 8.6990 | 1 |
| CatBoost_BAG_L2 | 95.03% | 0.8295 | 95.01% | 178.3345 | 0.4817 | 2 |
| WeightedEnsemble_L2 | 94.97% | 0.8288 | 94.66% | 3.8371 | 0.0058 | 2 |
| LightGBM_BAG_L1 | 94.87% | 0.8271 | 94.57% | 205.4603 | 3.7624 | 1 |
| CatBoost_BAG_L1 | 94.66% | 0.8240 | 94.41% | 456.5169 | 0.5143 | 1 |
| NeuralNetFastAI_BAG_L1 | 93.94% | 0.8184 | 93.75% | 2731.8908 | 29.8472 | 1 |
| RandomForestGini_BAG_L1 | 92.46% | 0.7906 | 92.42% | 6.5490 | 0.2591 | 1 |
| ExtraTreesGini_BAG_L1 | 91.73% | 0.7807 | 91.26% | 1.0625 | 0.1114 | 1 |
| KNeighborsDist_BAG_L1 | 89.82% | 0.7445 | 89.36% | 0.0992 | 5.3558 | 1 |
| Class | Non-Forest | Forest | Producer’s Accuracy | User’s Accuracy | F1 |
|---|---|---|---|---|---|
| Non-forest | 915 | 14 | 98.49% | 96.11% | 97.29% |
| Forest | 37 | 164 | 81.59% | 92.13% | 86.54% |
| Overall accuracy = 95.49% | Kappa = 0.8384 | Weighted F1 = 95.38% | |||
| Class | Deciduous Broadleaf | Evergreen Needleleaf | Deciduous Needleleaf | Mixed Forest | Producer’s Accuracy | User’s Accuracy | F1 |
|---|---|---|---|---|---|---|---|
| Deciduous broadleaf | 47 | 6 | 4 | 5 | 75.81% | 68.12% | 71.76% |
| Evergreen needleleaf | 13 | 148 | 11 | 17 | 78.31% | 93.67% | 85.30% |
| Deciduous needleleaf | 3 | 2 | 22 | 2 | 75.86% | 57.89% | 65.67% |
| Mixed forest | 6 | 2 | 1 | 39 | 81.25% | 61.90% | 70.27% |
| Overall accuracy = 78.05% | Kappa = 0.6593 | Weighted F1 = 78.81% | |||||
| Data | Overall Accuracy | Kappa | Weighted F1 |
|---|---|---|---|
| Ours | 95.49% | 0.8384 | 95.38% |
| FROM-GLC10 | 93.37% | 0.7892 | 93.33% |
| ESA10 | 91.86% | 0.7671 | 91.96% |
| ESRI10 | 92.58% | 0.7649 | 92.51% |
| Globeland30 | 88.32% | 0.5990 | 88.30% |
| ESACCI | 87.88% | 0.4519 | 85.52% |
| MLCT | 83.45% | 0.1150 | 77.15% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Liu, H.; Sang, L.; Wang, J. Characterizing Forest Cover and Landscape Pattern Using Multi-Source Remote Sensing Data with Ensemble Learning. Remote Sens. 2022, 14, 5470. https://doi.org/10.3390/rs14215470
Wang Y, Liu H, Sang L, Wang J. Characterizing Forest Cover and Landscape Pattern Using Multi-Source Remote Sensing Data with Ensemble Learning. Remote Sensing. 2022; 14(21):5470. https://doi.org/10.3390/rs14215470
Chicago/Turabian StyleWang, Yu, Han Liu, Lingling Sang, and Jun Wang. 2022. "Characterizing Forest Cover and Landscape Pattern Using Multi-Source Remote Sensing Data with Ensemble Learning" Remote Sensing 14, no. 21: 5470. https://doi.org/10.3390/rs14215470
APA StyleWang, Y., Liu, H., Sang, L., & Wang, J. (2022). Characterizing Forest Cover and Landscape Pattern Using Multi-Source Remote Sensing Data with Ensemble Learning. Remote Sensing, 14(21), 5470. https://doi.org/10.3390/rs14215470