


Reweighted Robust Particle Filtering Approach for Target Tracking in Automotive Radar Application


Abstract
:1. Introduction
2. Proposed Model
2.1. Problem Formulation
2.2. Generative Model
2.3. Reweighted Robust Particle Filter
| Algorithm 1 Reweighted Robust Particle Filter |
Input: Output:,
|
2.4. Algorithm Analysis
2.5. Cramer–Rao Bound for the Model
3. Simulations and Experiments
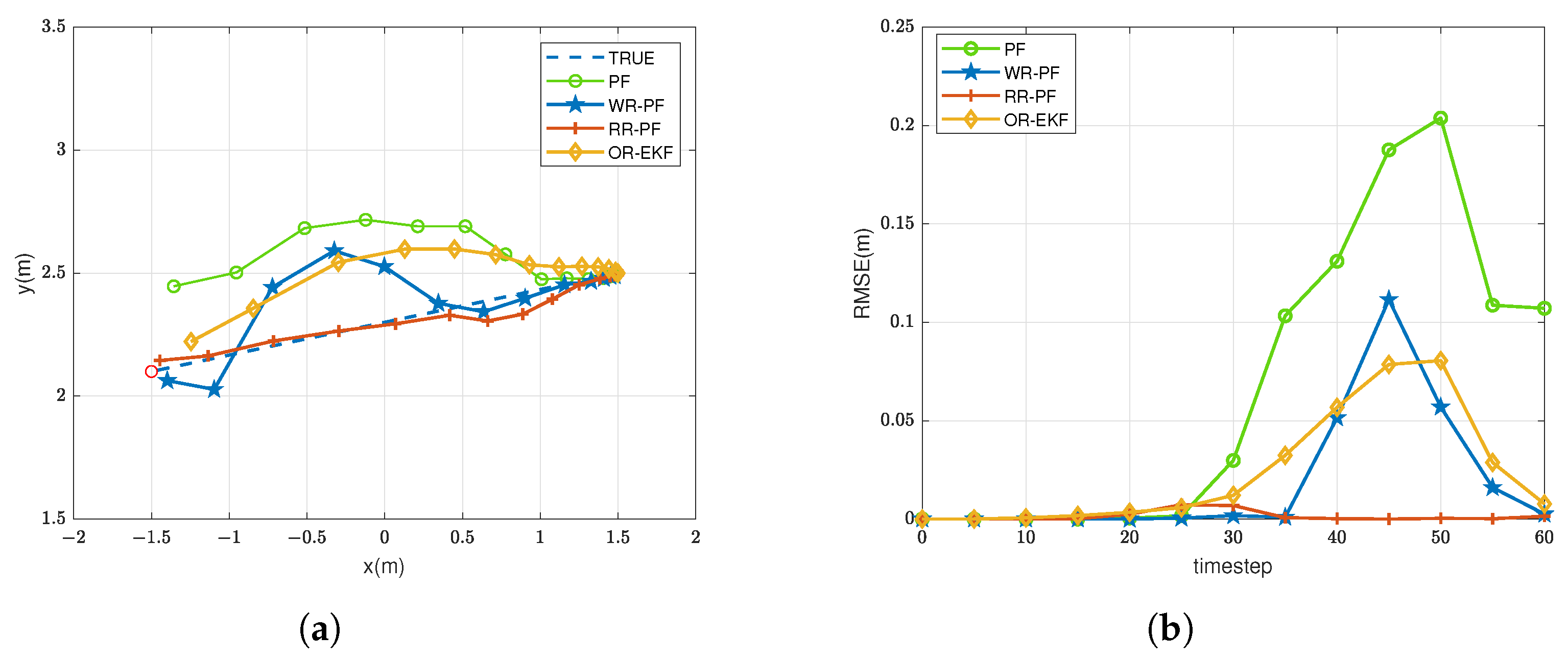
3.1. Performance Testing on Simulated Data
3.2. Cramer–Rao Bound Analysis of the Proposed Algorithm
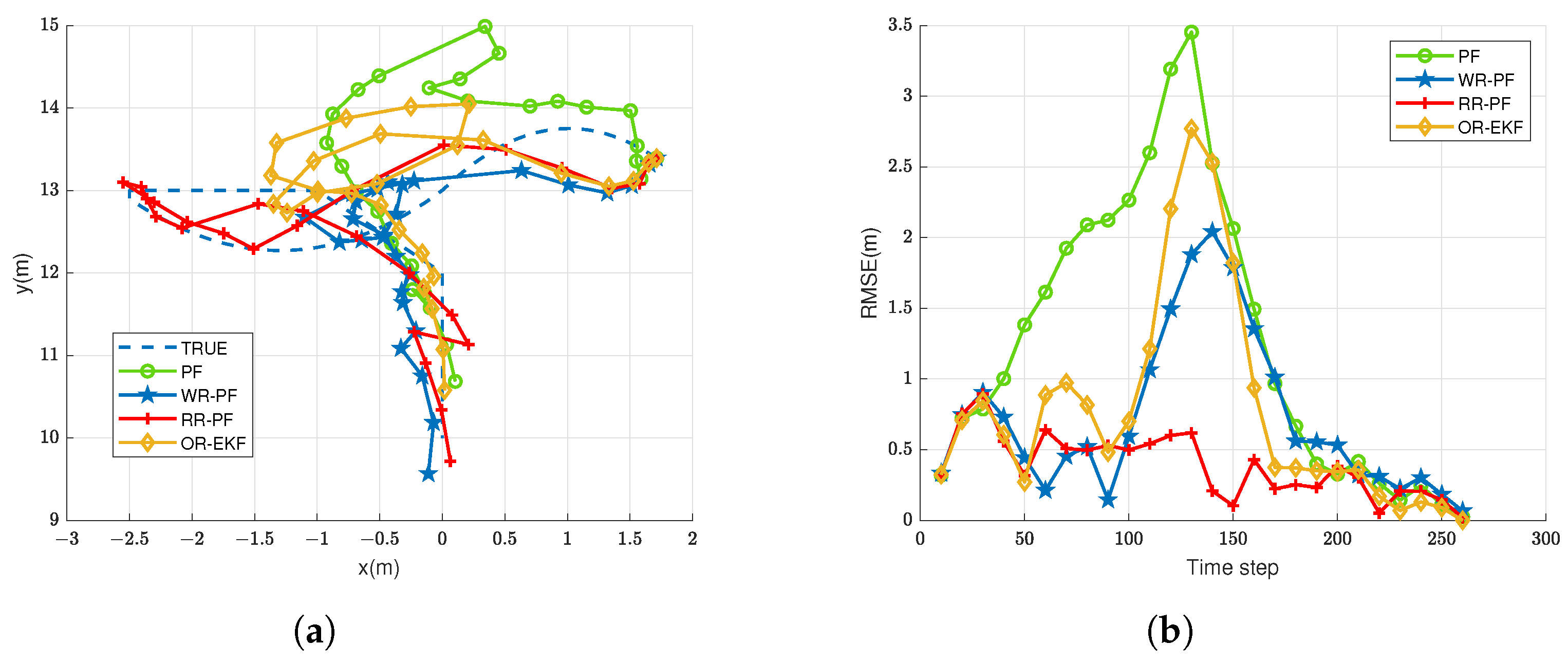
3.3. Experimental Results Based on Real Data
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lewis, T. Outliers in Statistical Data, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 1994; p. 608. [Google Scholar]
- Du, H.; Wang, W.; Bai, L. Observation noise modeling based particle filter: An efficient algorithm for target tracking in glint noise environment. Neurocomputing 2015, 158, 155–166. [Google Scholar] [CrossRef]
- Nigam, N.; Saxena, T.; Richhariya, V. Global high dimension outlier algorithm for efficient clustering outlier detection. In Proceedings of the 2016 Symposium on Colossal Data Analysis and Networking (CDAN), Indore, India, 18–19 March 2016. [Google Scholar]
- Zhu, J.; Kia, S. Bias compensation for UWB ranging for pedestrian geolocation applications. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Bai, J.; Li, S.; Huang, L.; Chen, H. Robust detection and tracking method for moving object based on radar and camera data fusion. IEEE Sens. J. 2021, 21, 10761–10774. [Google Scholar] [CrossRef]
- Zhou, T.; Yang, M.; Jiang, K.; Wong, H.; Yang, D. MMW radar-based technologies in autonomous driving: A review. Sensors 2020, 20, 7283. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Lai, Z.; Amin, M.G. Through-the-wall radar imaging based on Bayesian compressive sensing exploiting multipath and target structure. IEEE Trans. Comput. Imag. 2021, 7, 422–435. [Google Scholar] [CrossRef]
- Kalman, R.E. A new appraoch to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Zhai, G.; Wu, C.; Wang, Y. Millimeter wave radar target tracking based on adaptive kalman filter. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 453–458. [Google Scholar]
- Fang, H.; Haile, M.A.; Wang, Y. Robust extended kalman filtering for systems with measurement outliers. IEEE Trans. Control Syst. Technol. 2022, 30, 795–802. [Google Scholar] [CrossRef]
- Mili, L.; Cheniae, M.G.; Vichare, N.S.; Rousseeuw, P.J. Robust state estimation based on projection statistics of power systems. IEEE Trans. Power Syst. 1996, 11, 1118–1127. [Google Scholar] [CrossRef]
- Thomas, L.; Mili, L. A robust GM-estimator for the automated detection of external defects on barked hardwood logs and stems. IEEE Trans. Signal Proc. 2007, 55, 3568–3576. [Google Scholar] [CrossRef]
- Gandhi, M.A.; Mili, L. Robust kalman filter based on a generalized maximum-likelihood-type estimator. IEEE Trans. Signal Proc. 2010, 58, 2509–2520. [Google Scholar] [CrossRef]
- Zhao, J.; Netto, M.; Mili, L. A robust iterated extended kalman filter for power system dynamic state estimation. IEEE Trans. Power Syst. 2017, 32, 3205–3216. [Google Scholar] [CrossRef]
- De Palma, D.; Indiveri, G. Output outlier robust state estimation. Int. J. Adapt. Control Signal Proc. 2017, 31, 581–607. [Google Scholar] [CrossRef]
- Pich, R.; Sárkká, S.; Hartikainen, J. Recursive weighted robust filtering and smoothing for nonlinear systems using the multivariate student-t distribution. In Proceedings of the IEEE International Workshop on Machine Learning for Signal Processing, Santander, Spain, 23–26 September 2012; pp. 1–6. [Google Scholar]
- Tapia, E. Gaussian and student-t filtering using implicit measurements via variational bayes. In Proceedings of the IEEE International Workshop on Machine Learning for Signal Processing (MLSP), Reims, France, 21–24 September 2014; pp. 1–6. [Google Scholar]
- Wang, H.; Li, H.; Zhang, W.; Wang, H. Laplace l1 robust Kalman filter based on majorization minimization. In Proceedings of the 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–5. [Google Scholar]
- Wang, G.; Yang, C.; Ma, X. A novel robust nonlinear Kalman filter based on multivariate laplace distribution. IEEE Trans. Circ. Syst. Exp. Brief. 2021, 68, 2705–2709. [Google Scholar] [CrossRef]
- Ting, J.-A.; Theodorou, E.; Schaal, S. Learning a weighted robust Kalman filter. In Proceedings of the Machine Learning: ECML 2007, Warsaw, Poland, 17–21 September 2007; pp. 748–756. [Google Scholar]
- Ting, J.-A.; Theodorou, E.; Schaal, S. A Kalman filter for robust outlier detection. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1514–1519. [Google Scholar]
- Agamennoni, G.; Nieto, J.I.; Nebot, E.M. An outlier-robust Kalman filter. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1551–1558. [Google Scholar]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A novel adaptive kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Autom. Control 2018, 63, 594–601. [Google Scholar] [CrossRef] [Green Version]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H. A new approach for filtering nonlinear systems. In Proceedings of the 1995 American Control Conference—ACC’95, Seattle, WA, USA, 21–23 June 1995; pp. 1628–1632. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Proc. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Zhang, Y.; Li, N.; Chambers, J. A robust gaussian approximate filter for nonlinear systems with heavy tailed measurement noises. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 4209–4213. [Google Scholar]
- Xu, D.; Shen, C.; Shen, F. A robust particle filtering algorithm with non-gaussian measurement noise using student-t distribution. IEEE Signal Proc. Lett. 2014, 21, 30–34. [Google Scholar] [CrossRef]
- Tichavsky, P.; Muravchik, C.H.; Nehorai, A. Posterior Cramer-Rao bounds for discrete-time nonlinear filtering. IEEE Trans. Signal Proc. 1998, 46, 1386–1396. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | PF | OR-EKF | WR-PF | RR-PF |
|---|---|---|---|---|
| Average executive time | 0.0269 s | 0.0096 s | 0.0317 s | 0.0367 s |
| Parameters | Definition | Values |
|---|---|---|
| Carrier frequency | 77 GHz | |
| B | Bandwidth | 4 GHz |
| Sampling rate | 6.25 MHz | |
| T | Pulse duration | 50 s |
| Range FFT points | 128 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Chen, L.; Li, Y.; Wang, Z.; Yao, S.; Li, H. Reweighted Robust Particle Filtering Approach for Target Tracking in Automotive Radar Application. Remote Sens. 2022, 14, 5477. https://doi.org/10.3390/rs14215477
Wu Q, Chen L, Li Y, Wang Z, Yao S, Li H. Reweighted Robust Particle Filtering Approach for Target Tracking in Automotive Radar Application. Remote Sensing. 2022; 14(21):5477. https://doi.org/10.3390/rs14215477
Chicago/Turabian StyleWu, Qisong, Lingjie Chen, Yanping Li, Zijun Wang, Shuai Yao, and Hao Li. 2022. "Reweighted Robust Particle Filtering Approach for Target Tracking in Automotive Radar Application" Remote Sensing 14, no. 21: 5477. https://doi.org/10.3390/rs14215477