




Rice and Greenhouse Identification in Plateau Areas Incorporating Sentinel-1/2 Optical and Radar Remote Sensing Data from Google Earth Engine




Abstract
:1. Introduction
- (1)
- In the highland region, the optical texture features have less impact on the classification accuracy of images under complex imaging conditions. Specifically, fusing optical and radar data classification as well as using only optical data classification showed that the addition of texture features did not dominate with increasing feature values in complex parcel classification accuracy;
- (2)
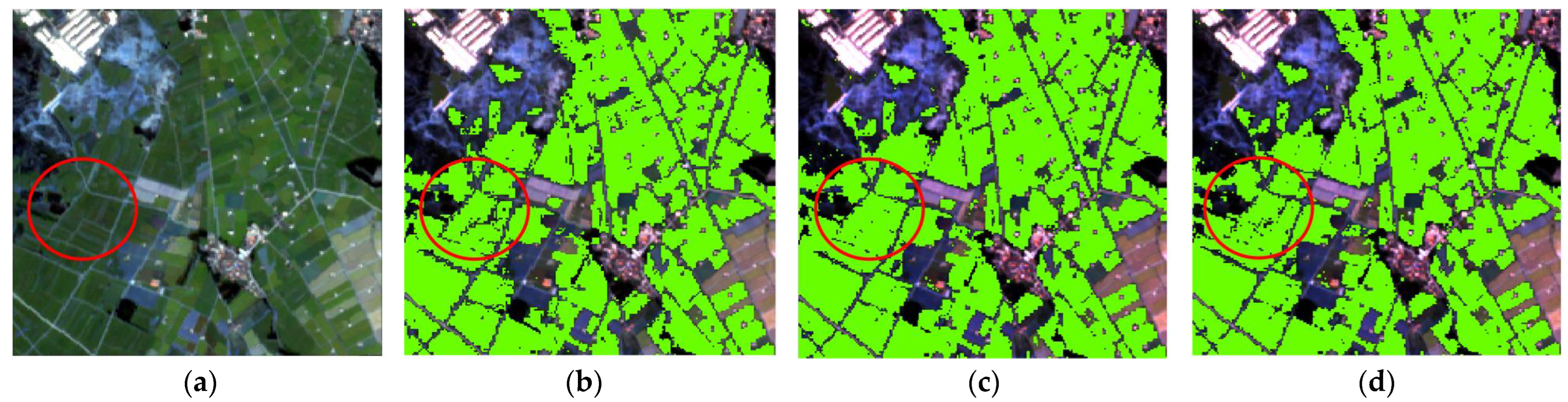
- The construction of the PCA-MR method can improve the problem of “different spectrum of the same object, foreign objects in the same spectrum” caused by plot fragmentation and the surrounding environment in the plateau area;
- (3)
- This recognition framework makes full use of GEE multi-source data to simplify the acquisition and processing of data. Theoretically, as long as the phenology information of ground objects is obtained, the mapping results with a resolution of 10 M can be obtained easily and quickly in any test area.
2. Materials and Methods
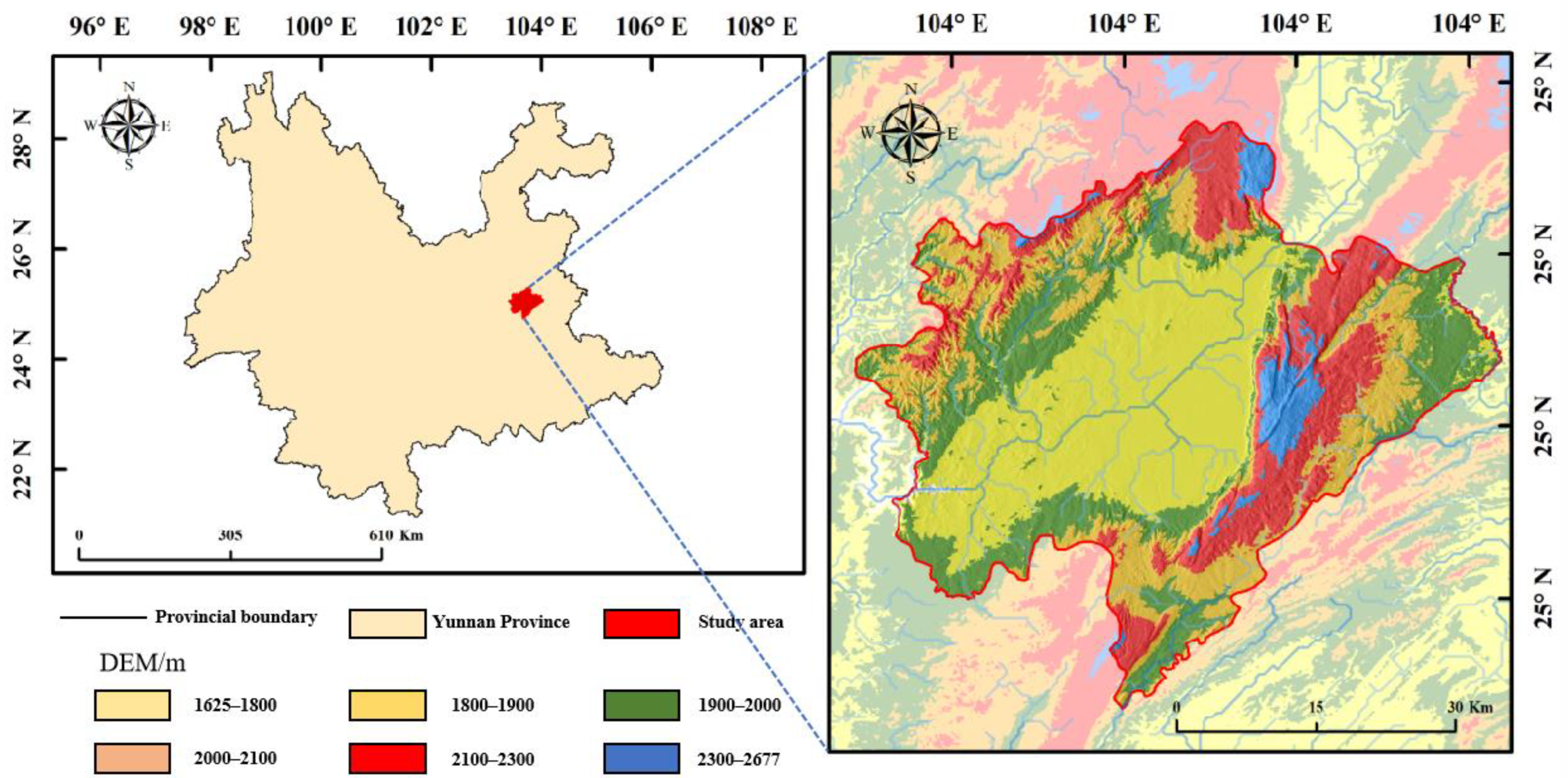
2.1. Study Area
2.2. Data
2.2.1. Sentinel Data
2.2.2. Reference Data
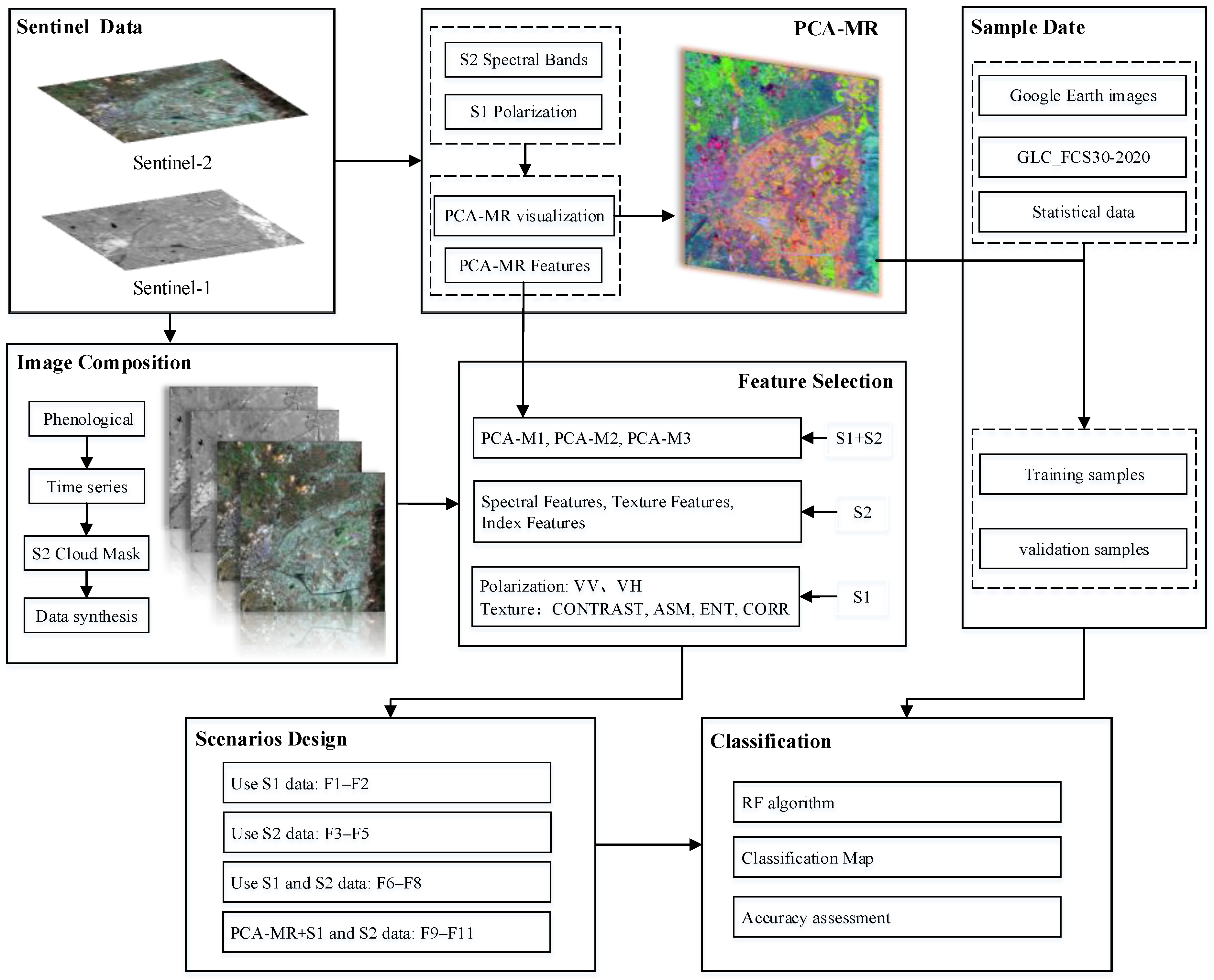
2.3. Methods
2.3.1. Random Forest Algorithm
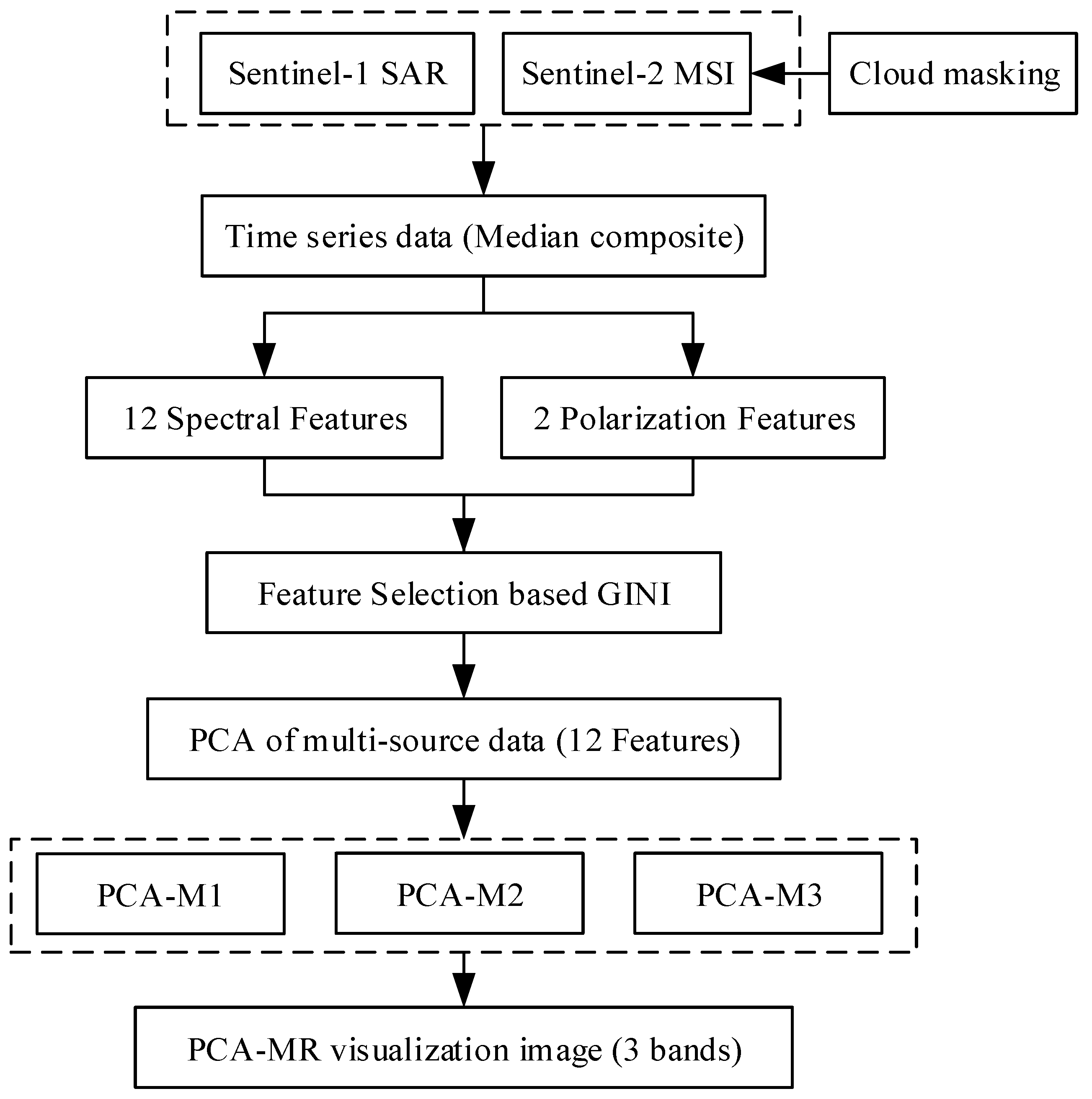
2.3.2. Principal Component Analysis of Multi-Source Remote Sensing Data (PCA-MR)
- (1)
- Feature establishment
- (2)
- Calculation of PCA-MR
2.3.3. Scenarios Design
2.3.4. Accuracy Assessment
3. Results
3.1. Classification with Active and Passive Remote Sensing Data
3.1.1. Classification with Single Sensor Data
3.1.2. Classification with Combined Optical and Radar Data
3.2. Classification with Combined PCA-MR and Active and Passive Remote Sensing Data
4. Discussion
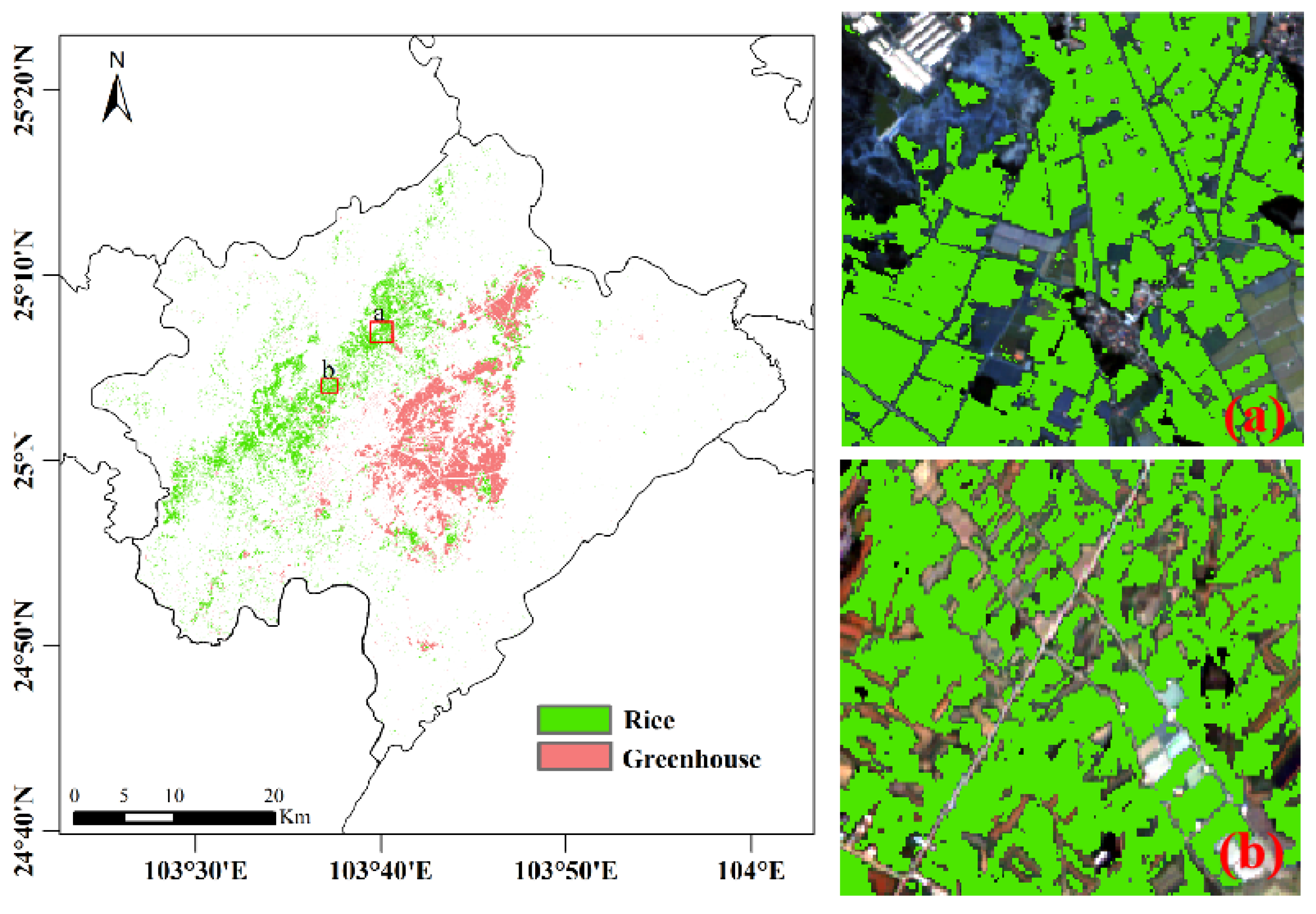
4.1. The Reliability of the Generated High-Resolution Planting Structure Map
4.2. Application of PCA-MR to Large-Area Mapping
4.3. Uncertainty
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, L.; Chang, J.; Wang, Y.; Guo, A.; Liu, Y.; Wang, Q.; Zhu, Y.; Zhang, Y.; Xie, Z. Disclosing the future food security risk of China based on crop production and water scarcity under diverse socioeconomic and climate scenarios. Sci. Total Environ. 2021, 790, 148110. [Google Scholar] [CrossRef] [PubMed]
- Tong, X.; Brandt, M.; Yue, Y.; Horion, S.; Wang, K.; De Keersmaecker, W.; Tian, F.; Schurgers, G.; Xiao, X.; Luo, Y.; et al. Increased vegetation growth and carbon stock in China karst via ecological engineering. Nat. Sustain. 2018, 1, 44–50. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, L.; Wu, W.; Jiang, Z.; Li, H. Monitoring plastic-mulched farmland by Landsat-8 OLI imagery using spectral and textural features. Remote Sens. 2016, 8, 353. [Google Scholar]
- Talukdar, S.; Singha, P.; Mahato, S.; Shahfahad Pal, S.; Liou, Y.A.; Rahman, A. Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review. Remote Sens. 2020, 12, 1135. [Google Scholar] [CrossRef] [Green Version]
- Hao, P.Y.; Zhan, Y.L.; Wang, L.; Niu, Z.; Shakir, M. Feature Selection of Time Series MODIS Data for Early Crop Classification Using Random Forest: A Case Study in Kansas, USA. Remote Sens. 2015, 7, 5347–5369. [Google Scholar] [CrossRef] [Green Version]
- Sheykhmousa, M.; Mahdianpari, M.; Ghanbari, H.; Mohammadimanesh, F.; Ghamisi, P.; Homayouni, S. Support Vector Machine versus Random Forest for Remote Sensing Image Classification: A Meta-Analysis and Systematic Review. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6308–6325. [Google Scholar] [CrossRef]
- Wang, L.M.; Dong, Q.H.; Yang, L.B.; Gao, J.M.; Liu, J. Crop Classification Based on a Novel Feature Filtering and Enhancement Method. Remote Sens. 2019, 11, 455. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Feng, Z.M.; Jiang, L.G.; Liu, Y.J.; Xiao, X.M. Changes in rice cropping systems in the Poyang Lake Region, China during 2004–2010. J. Geogr. Sci. 2012, 22, 653–668. [Google Scholar] [CrossRef]
- Lin, J.H.; Jin, X.B.; Ren, J.; Liu, J.P.; Laing, X.Y.; Zhou, Y.K. Rapid Mapping of Large-Scale Greenhouse Based on Integrated Learning Algorithm and Google Earth Engine. Remote Sens. 2021, 13, 1245. [Google Scholar] [CrossRef]
- Xiang, H. Land Cover Classification in Cloud and Hilly Regions Based on Optical and SAR Date. Ph.D. Dissertation, Department Mapping of ENG, Southwest University, , Chongqing, China, 2018. [Google Scholar]
- Ni, R.G.; Tian, J.Y.; Li, X.J.; Yin, D.M.; Li, J.W.; Gong, H.L.; Zhang, J.; Zhu, L.; Wu, D.L. An enhanced pixel-based phenological feature for accurate paddy rice mapping with Sentinel-2 imagery in Google Earth Engine. ISPRS J. Photogramm. 2021, 178, 282–296. [Google Scholar] [CrossRef]
- Zhang, M.N.; Huang, H.B.; Li, Z.C.; Hackman, K.O.; Liu, C.; Andriamiarisoa, R.L.; Raherivelo, T.N.A.N.; Li, Y.X.; Gong, P. Automatic high-resolution land cover production in madagascar using sentinel-2 time series, tile-based image classification and google earth engine. Remote Sens. 2020, 12, 3663. [Google Scholar] [CrossRef]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Persson, M.; Lindberg, E.; Reese, H. Tree Species Classification with Multi-Temporal Sentinel-2 Data. Remote Sens. 2018, 10, 1794. [Google Scholar] [CrossRef] [Green Version]
- Grabska, E.; Frantz, D.; Ostapowicz, K. Evaluation of machine learning algorithms for forest stand species mapping using Sentinel-2 imagery and environmental data in the Polish Carpathians. Remote Sens. Environ. 2020, 251, 112103. [Google Scholar] [CrossRef]
- Luo, C.; Qi, B.; Liu, H.; Guo, D.; Lu, P.; Fu, Q.; Shao, Y. Using Time Series Sentinel-1 Images for Object-Oriented Crop Classification in Google Earth Engine. Remote Sens. 2021, 13, 561. [Google Scholar] [CrossRef]
- Nandy, S.; Srinet, R.; Padalia, H. Mapping Forest Height and Aboveground Biomass by Integrating ICESat-2, Sentinel-1 and Sentinel-2 Data Using Random Forest Algorithm in Northwest Himalayan Foothills of India. Geophys. Res. Lett. 2021, 48, e2021GL093799. [Google Scholar] [CrossRef]
- Chen, Y.S.; Hou, J.L.; Huang, C.L.; Zhang, Y.; Li, X.H. Mapping Maize Area in Heterogeneous Agricultural Landscape with Multi-Temporal Sentinel-1 and Sentinel-2 Images Based on Random Forest. Remote Sens. 2021, 13, 2988. [Google Scholar] [CrossRef]
- Jin, Z.N.; Azzari, G.; You, C.; Di Tommaso, S.; Aston, S.; Burke, M.; Lobell, D.B. Smallholder maize area and yield mapping at national scales with Google Earth Engine. Remote Sens. Environ. 2019, 228, 115–128. [Google Scholar] [CrossRef]
- Li, C.C.; Chen, W.; Wang, Y.L.; Wang, Y.; Ma, C.Y.; Li, Y.C.; Li, J.P.; Zhai, W.G. Mapping Winter Wheat with Optical and SAR Images Based on Google Earth Engine in Henan Province, China. Remote Sens. 2022, 14, 284. [Google Scholar] [CrossRef]
- Gargiulo, M.; Dell’Aglio, D.A.G.; Iodice, A.; Riccio, D.; Ruello, G. Integration of Sentinel-1 and Sentinel-2 Data for Land Cover Mapping Using W-Net. Sensors 2020, 20, 2969. [Google Scholar] [CrossRef]
- Steinhausen, M.J.; Wagner, P.D.; Narasimhan, B.; Waske, B. Combining Sentinel-1 and Sentinel-2 data for improved land use and land cover mapping of monsoon regions. Int. J. Appl. Earth Obs. 2018, 73, 595–604. [Google Scholar] [CrossRef]
- Tavares, P.A.; Beltrao, N.E.S.; Guimaraes, U.S.; Teodoro, A.C. Integration of Sentinel-1 and Sentinel-2 for Classification and LULC Mapping in the Urban Area of Belém, Eastern Brazilian Amazon. Sensors 2019, 19, 1140. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhong, L.H.; Gong, P.; Biging, G.S. Efficient corn and soybean mapping with temporal extendability: A multi-year experiment using Landsat imagery. Remote Sens. Environ. 2014, 140, 1–13. [Google Scholar] [CrossRef]
- Massey, R.; Sankey, T.T.; Congalton, R.G.; Yadav, K.; Thenkabail, P.S.; Ozdogan, M.; Meador, A.J.S. MODIS phenology-derived, multi-year distribution of conterminous US crop types. Remote Sens. Environ. 2017, 198, 490–503. [Google Scholar] [CrossRef]
- Tsai, Y.H.; Stow, D.; Chen, H.L.; Lewison, R.; An, L.; Shi, L. Mapping Vegetation and Land Use Types in Fanjingshan National Nature Reserve Using Google Earth Engine. Remote Sens. 2018, 10, 927. [Google Scholar] [CrossRef] [Green Version]
- Herrero, H.V.; Southworth, J.; Bunting, E. Utilizing Multiple Lines of Evidence to Determine Landscape Degradation within Protected Area Landscapes: A Case Study of Chobe National Park, Botswana from 1982 to 2011. Remote Sens. 2016, 8, 623. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Homayouni, S.; Gill, E. The First Wetland Inventory Map of Newfoundland at a Spatial Resolution of 10 m Using Sentinel-1 and Sentinel-2 Data on the Google Earth Engine Cloud Computing Platform. Remote Sens. 2019, 11, 43. [Google Scholar] [CrossRef] [Green Version]
- Teluguntla, P.; Thenkabail, P.S.; Oliphant, A.; Xiong, J.; Gumma, M.K.; Congalton, R.G.; Yadav, K.; Huete, A. A 30-m landsat-derived cropland extent product of Australia and China using random forest machine learning algorithm on Google Earth Engine cloud computing platform. ISPRS J. Photogramm. 2018, 144, 325–340. [Google Scholar] [CrossRef]
- Mcfeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Xu, H.Q. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Xiao, X.M.; Hollinger, D.; Aber, J.; Goltz, M.; Davidson, E.A.; Zhang, Q.Y.; Moore, B. Satellite-based modeling of gross primary production in an evergreen needleleaf forest. Remote Sens. Environ. 2004, 89, 519–534. [Google Scholar] [CrossRef]
- Zha, Y.; Gao, J.; Ni, S. Use of normalized difference built-up index in automatically mapping urban areas from TM imagery. Int. J. Remote Sens. 2003, 24, 583–594. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Vina, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote estimation of canopy chlorophyll content in crops. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef] [Green Version]
- Nembrini, S.; Konig, I.R.; Wright, M.N. The revival of the Gini importance? Bioinformatics 2018, 34, 3711–3718. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Selvaraj, M.G.; Vergara, A.; Montenegro, F.; Ruiz, H.A.; Safari, N.; Raymaekers, D.; Ocimati, W.; Ntamwira, J.; Tits, L.; Omondi, A.B.; et al. Detection of banana plants and their major diseases through aerial images and machine learning methods: A case study in DR Congo and Republic of Benin. ISPRS J. Photogramm. 2020, 169, 110–124. [Google Scholar] [CrossRef]
- Gxokwe, S.; Sude, T.; Mazvimavi, D. Leveraging Google Earth Engine platform to characterize and map small seasonal wetlands in the semi-arid environments of South Africa. Sci. Total Environ. 2022, 803, 150139. [Google Scholar] [CrossRef]
- Luo, J.S.; Ma, X.W.; Chu, Q.F.; Xie, M.; Cao, Y.J. Characterizing the Up-To-Date Land-Use and Land-Cover Change in Xiong’an New Area from 2017 to 2020 Using the Multi-Temporal Sentinel-2 Images on Google Earth Engine. ISPRS Int. J. Geo-Inf. 2021, 10, 464. [Google Scholar] [CrossRef]
- Tassi, A.; Vizzari, M. Object-Oriented LULC Classification in Google Earth Engine Combining SNIC, GLCM, and Machine Learning Algorithms. Remote Sens. 2020, 12, 3776. [Google Scholar] [CrossRef]
- Lu, H.; Ma, L.; Fu, X.; Liu, C.; Wang, Z.; Tang, M.; Li, N.W. Landslides Information Extraction Using Object-Oriented Image Analysis Paradigm Based on Deep Learning and Transfer Learning. Remote Sens. 2020, 12, 752. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Sun, Y.L.; Shang, K.; Zhang, L.F.; Wang, S.D. Crop Classification Based on Feature Band Set Construction and Object-Oriented Approach Using Hyperspectral Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4117–4128. [Google Scholar] [CrossRef]
- Li, M.Y.; Zhang, R.; Luo, H.X.; Gu, S.W.; Qin, Z.L. Crop Mapping in the Sanjiang Plain Using an Improved Object-Oriented Method Based on Google Earth Engine and Combined Growth Period Attributes. Remote Sens. 2022, 14, 273. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Rice | Greenhouses | Impervious | Water | Forest | Others | Total |
|---|---|---|---|---|---|---|---|
| Train | 579 | 588 | 529 | 49 | 255 | 517 | 2517 |
| Test | 643 | 561 | 605 | 54 | 233 | 753 | 2849 |
| Total | 1222 | 1149 | 1134 | 103 | 488 | 1270 | 5366 |
| Sensor Used | Feature Space | Characteristic Variable | Total |
|---|---|---|---|
| S2 | Spectral | B1, B2, B3, B4, B5, B6, B7, B8, B8A, B9, B11, B12 | 12 |
| Index | NDVI, NDWI, EVI, LSWI, NDBI, GCVI, SAVI, MNDWI | 8 | |
| Texture | CONTRAST, ASM, ENT, CORR | 4 | |
| S1 | Polarization | VV, VH | 2 |
| Texture (VV, VH) | CONTRAST, ASM, ENT, CORR | 8 | |
| S1 + S2 | PCA-MR | PCA-M1, PCA-M2, PCA-M3 | 3 |
| Scenario | Category of the Features | Number of Variables |
|---|---|---|
| F1 | S1 Polarization | 2 |
| F2 | S1(Polarization + Texture) | 10 |
| F3 | S2 Spectral | 12 |
| F4 | S2 (Spectral + Index) | 20 |
| F5 | S2 (Spectral + Index + GLCM) | 24 |
| F6 | S1(Polarization + Texture) + S2 Spectral | 22 |
| F7 | S1(Polarization + Texture) + S2 (Spectral + Index) | 30 |
| F8 | S1(Polarization + Texture) + S2 (Spectral + Index + GLCM) | 34 |
| F9 | S1(Polarization + Texture) + S2 Spectral + PCA-MR | 25 |
| F10 | S1(Polarization + Texture) + S2 (Spectral + Index) + PCA-MR | 33 |
| F11 | S1(Polarization + Texture) + S2 (Spectral + Index + GLCM) + PCA-MR | 37 |
| Classes | F1 | F2 | F3 | F4 | ||||
|---|---|---|---|---|---|---|---|---|
| PA | UA | PA | UA | PA | UA | PA | UA | |
| Rice | 0.81 | 0.72 | 0.85 | 0.77 | 0.95 | 0.93 | 0.96 | 0.92 |
| Greenhouses | 0.73 | 0.72 | 0.74 | 0.76 | 0.92 | 0.95 | 0.92 | 0.96 |
| Impervious | 0.79 | 0.86 | 0.88 | 0.90 | 0.85 | 0.83 | 0.85 | 0.84 |
| Forest | 0.71 | 0.77 | 0.68 | 0.95 | 0.96 | 0.96 | 0.96 | 0.96 |
| Water | 0.90 | 0.95 | 0.90 | 0.98 | 0.94 | 1.00 | 0.94 | 1.00 |
| Others | 0.73 | 0.75 | 0.75 | 0.74 | 0.87 | 0.87 | 0.87 | 0.87 |
| OA (%) | 73.35 | 79.98 | 90.66 | 90.86 | ||||
| Kappa | 0.70 | 0.74 | 0.88 | 0.88 | ||||
| Classes | F5 | F6 | F7 | F8 | ||||
|---|---|---|---|---|---|---|---|---|
| PA | UA | PA | UA | PA | UA | PA | UA | |
| Rice | 0.96 | 0.91 | 0.97 | 0.94 | 0.97 | 0.94 | 0.97 | 0.93 |
| Greenhouses | 0.92 | 0.94 | 0.95 | 0.93 | 0.96 | 0.93 | 0.96 | 0.93 |
| Impervious | 0.85 | 0.87 | 0.87 | 0.88 | 0.87 | 0.92 | 0.85 | 0.93 |
| Forest | 0.96 | 0.95 | 0.96 | 0.96 | 0.96 | 0.97 | 0.95 | 0.96 |
| Water | 0.94 | 1.00 | 0.94 | 1.00 | 0.96 | 1.00 | 0.96 | 1.00 |
| Others | 0.88 | 0.89 | 0.88 | 0.90 | 0.88 | 0.89 | 0.89 | 0.89 |
| OA (%) | 91.18 | 91.90 | 92.31 | 92.45 | ||||
| Kappa | 0.88 | 0.89 | 0.90 | 0.90 | ||||
| F9 | F10 | F11 | ||||
|---|---|---|---|---|---|---|
| Rice | Greenhouses | Rice | Greenhouses | Rice | Greenhouses | |
| PA | 0.97 | 0.95 | 0.97 | 0.94 | 0.97 | 0.95 |
| UA | 0.94 | 0.96 | 0.96 | 0.96 | 0.93 | 0.96 |
| OA (%) | 92.91 | 93.47 | 93.40 | |||
| Kappa | 0.91 | 0.92 | 0.92 | |||
| Reference Class | Rice | GH | Water | Forest | Imp | Others | Total | PA (%) | OE (%) | PA for F7 (%) |
|---|---|---|---|---|---|---|---|---|---|---|
| Rice | 626 | 0 | 0 | 2 | 0 | 15 | 643 | 97.36 | 2.64 | 97.05 |
| Greenhouses | 0 | 541 | 0 | 0 | 12 | 8 | 561 | 96.43 | 3.57 | 96.08 |
| Water | 0 | 0 | 52 | 1 | 0 | 1 | 54 | 96.30 | 3.70 | 96.29 |
| Forest | 1 | 0 | 0 | 225 | 0 | 7 | 233 | 96.57 | 3.43 | 96.57 |
| Impervious | 10 | 11 | 0 | 0 | 538 | 46 | 605 | 88.93 | 11.07 | 86.94 |
| Others | 31 | 11 | 0 | 5 | 28 | 678 | 753 | 90.04 | 9.96 | 88.18 |
| Total | 668 | 565 | 52 | 232 | 578 | 754 | 2849 | OA (%): 93.47 Kappa: 0.92 | ||
| UA (%) | 93.71 | 96.09 | 100.00 | 96.57 | 93.08 | 89.80 | ||||
| CE (%) | 6.29 | 3.91 | 0.00 | 3.43 | 6.29 | 10.20 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Tang, B.-H.; Huang, L.; Chen, G. Rice and Greenhouse Identification in Plateau Areas Incorporating Sentinel-1/2 Optical and Radar Remote Sensing Data from Google Earth Engine. Remote Sens. 2022, 14, 5727. https://doi.org/10.3390/rs14225727
Zhang T, Tang B-H, Huang L, Chen G. Rice and Greenhouse Identification in Plateau Areas Incorporating Sentinel-1/2 Optical and Radar Remote Sensing Data from Google Earth Engine. Remote Sensing. 2022; 14(22):5727. https://doi.org/10.3390/rs14225727
Chicago/Turabian StyleZhang, Tao, Bo-Hui Tang, Liang Huang, and Guokun Chen. 2022. "Rice and Greenhouse Identification in Plateau Areas Incorporating Sentinel-1/2 Optical and Radar Remote Sensing Data from Google Earth Engine" Remote Sensing 14, no. 22: 5727. https://doi.org/10.3390/rs14225727
APA StyleZhang, T., Tang, B.-H., Huang, L., & Chen, G. (2022). Rice and Greenhouse Identification in Plateau Areas Incorporating Sentinel-1/2 Optical and Radar Remote Sensing Data from Google Earth Engine. Remote Sensing, 14(22), 5727. https://doi.org/10.3390/rs14225727