

Quality Control of CyGNSS Reflectivity for Robust Spatiotemporal Detection of Tropical Wetlands
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Sites along with the Collection of Field Data
2.2. CyGNSS GNSS-R Datasets and Their Preprocessing Methods
2.3. PALSAR-2 Datasets, Corresponding Preprocessing Methods and Cross-Validation Scheme with CyGNSS Data
3. Results
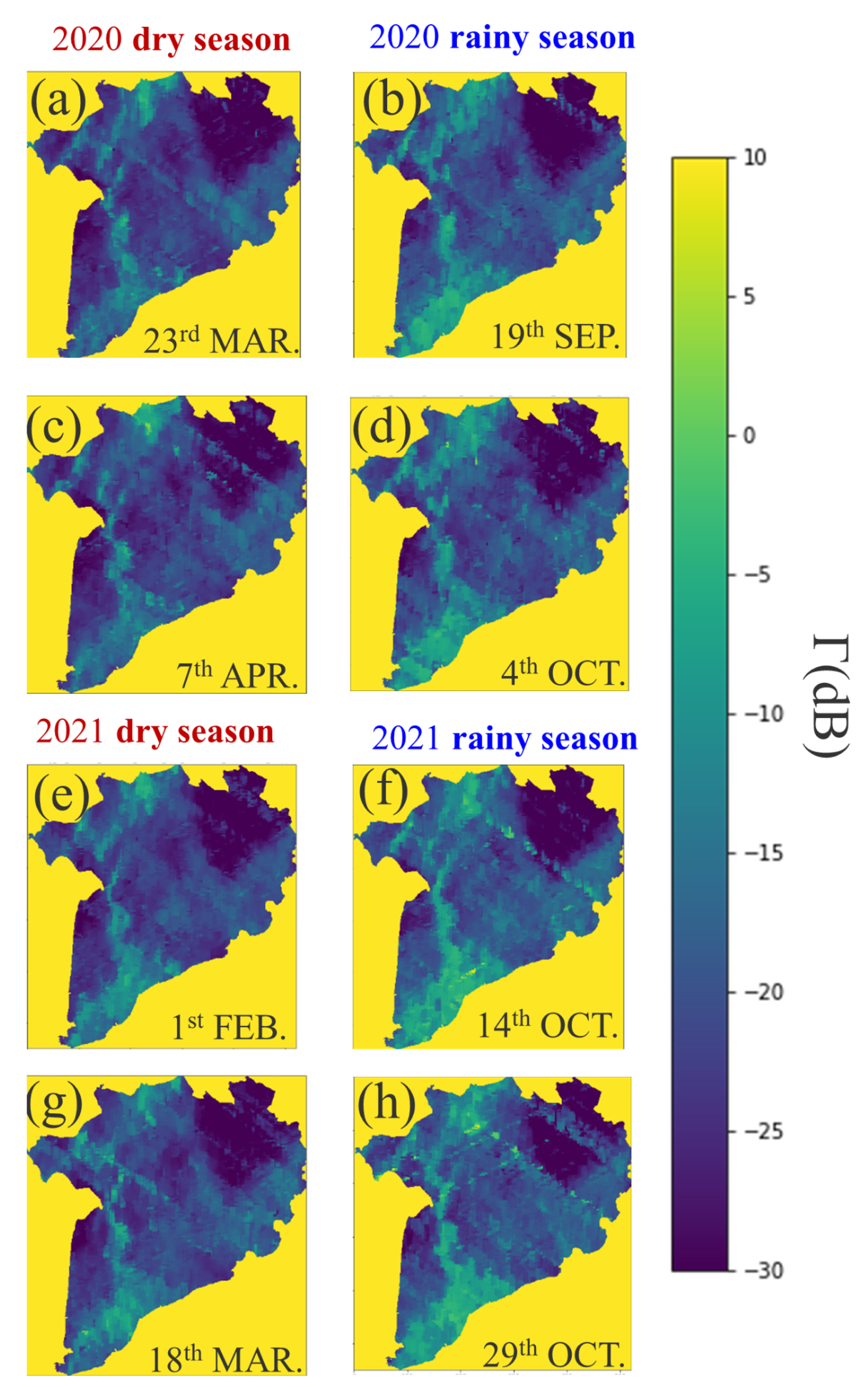
3.1. Spatiotemporal Dynamics Evaluation over the Mekong Delta by CyGNSS GNSS-R Measurements
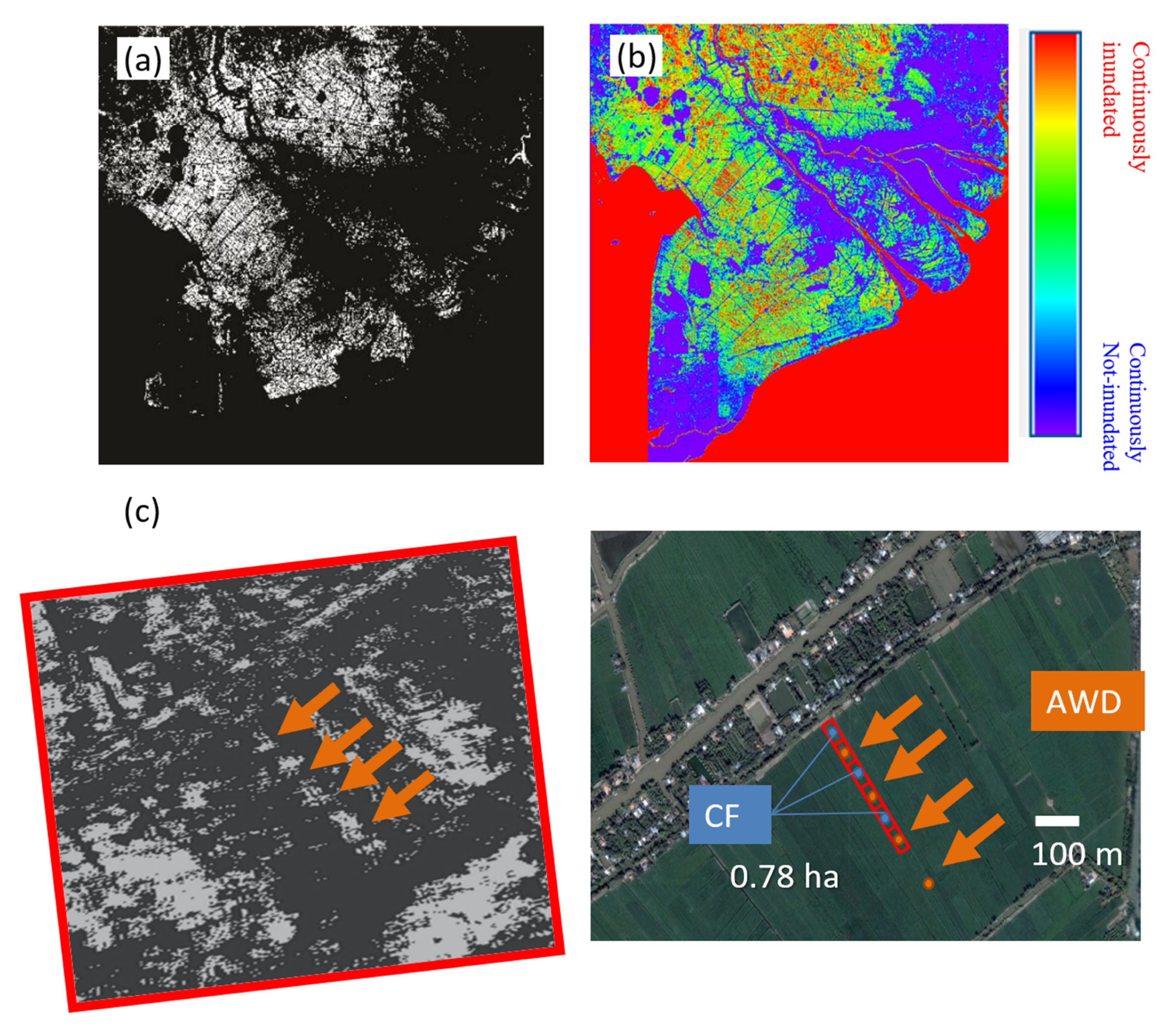
3.2. Cross-Validation with PALSAR-2 Quadruple Observation Products
4. Discussion
4.1. Performance of the Precision Index in the Rasterization Process without Sacrificing Spatial Resolution
4.2. Spatiotemporal Dynamics or Inundation Detection by CyGNSS
4.3. Comparison with Quadruple Polarimetric L-Band SAR Backscattering Signals
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Masson-Delmotte, V.; Zhai, P.; Pirani, A.; Connors, S.L.; Péan, C.; Berger, S.; Huang, M.; Yelekci, O.; Yu, R.; Zhou, B.; et al. Climate change 2021: The physical science basis. In Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2021. [Google Scholar]
- Schaefer, H.; Fletcher, S.E.M.; Veidt, C.; Lassey, K.R.; Brailsford, G.W.; Bromley, T.M.; Dlugokencky, E.J.; Michel, S.E.; Miller, J.B.; Levin, I.; et al. A 21st-century shift from fossil-fuel to biogenic methane emissions indicated by 13 CH4. Science 2016, 352, 80–84. [Google Scholar] [CrossRef] [PubMed]
- Nisbet, E.G.; Manning, M.R.; Dlugokencky, E.J.; Fisher, R.E.; Lowry, D.; Michel, S.E.; Lund Myhre, C.; Platt, S.M.; Allen, G.; Bousquet, P.; et al. Very strong atmospheric methane growth in the 4 years 2014–2017: Implications for the Paris Agreement. Glob. Biogeochem. Cycles 2019, 33, 318–342. [Google Scholar] [CrossRef] [Green Version]
- Rigby, M.; Montzka, S.A.; Prinn, R.G.; White, J.W.C.; Young, D.; O’Doherty, S.; Lunt, M.F.; Ganesan, A.L.; Manning, A.J.; Simmonds, P.G.; et al. Role of atmospheric oxidation in recent methane growth. Proc. Natl. Acad. Sci. USA 2017, 114, 5373–5377. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jackson, R.B.; Saunois, M.; Bousquet, P.; Canadelle, J.G.; Poulter, B.; Stavert, A.R.; Bergamaschi, P.; Niwa, Y.; Segers, A.; Tsuruta, A. Increasing anthropogenic methane emissions arise equally from agricultural and fossil fuel sources. Environ. Res. Lett. 2020, 15, 071002. [Google Scholar] [CrossRef]
- Saunois, M.; Stavert, A.R.; Poulter, B.; Bousquet, P.; Canadell, J.G.; Jackson, R.B.; Raymond, P.A.; Dlugokencky, E.J.; Houweling, S.; Patra, P.K.; et al. The global methane budget 2000–2017. Earth Syst. Sci. Data 2020, 12, 1561–1623. [Google Scholar] [CrossRef]
- Arai, H.; Takeuchi, W.; Oyoshi, K.; Nguyen, L.D.; Fumoto, T.; Inubushi, K.; Le Toan, T. Pixel-Based Evaluation of and Related Greenhouse Gas in the Integrating SAR Data and ground observation. In Remote Sensing of Agriculture and Land Cover/Land Use Changes in South and Southeast Asian Countries; Springer: Cham, Switzerland, 2021; pp. 251–266. [Google Scholar]
- Arai, H.; Takeuchi, W.; Oyoshi, K.; Nguyen, L.D.; Tachibana, T.; Uozumi, R.; Terasaki, K.; Miyoshi, T.; Yashiro, H.; Inubushi, K. Low cost and transparent MRV system of GHG emissions based on satellite remote sensing data: Case study on CH4 emission from the Mekong delta. In Monitoring of Global Environment and Disaster Risk Assessment from Space: The IIS Forum Proceedings; Volume 27 (National Diet Library, Japan) pp. 3–10. Available online: https://cir.nii.ac.jp/crid/1520853833371853952 (accessed on 10 February 2022).
- France, J.L.; Fisher, R.E.; Lowry, D.; Allen, G.; Andrade, M.F.; Bauguitte, S.J.B.; Bower, K.; Broderick, T.J.; Daly, M.C.; Forster, G.; et al. δ13C methane source signatures from tropical wetland and rice field emissions. Phil. Trans. R. Soc. A 2021, 380, 20200449. [Google Scholar]
- Arai, H.; Le Toan, T.; Takeuchi, W.; Oyoshi, K.; Fumoto, T.; Inubushi, K. Evaluating irrigation status in Mekong Delta through polarimetric L-band SAR data assimilation. Remote Sens. Environ. 2022, 279, 113139. [Google Scholar] [CrossRef]
- Ruf, C.S.; Atlas, R.; Chang, P.S.; Clarizia, M.P.; Garrison, J.L.; Gleason, S.; Katzberg, S.J.; Jelenak, Z.; Johnson, J.T.; Majumdar, S.J.; et al. New Ocean Winds Satellite Mission to Probe Hurricanes and Tropical Convection. Bull. Am. Meteorol. Soc. 2016, 97, 385–395. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Impact of the Elevation Angle on CYGNSS-R Bistatic Reflectivity as a function of the Effective Surface Roughness Over Land Surfaces. Remote Sens. 2018, 10, 1749. [Google Scholar] [CrossRef] [Green Version]
- Stilla, D.; Zribi, M.; Pierdicca, N.; Baghdadi, N.; Huc, M. Desert Roughness Retrieval Using CYGNSS GNSS-R Data. Remote Sens. 2020, 12, 743. [Google Scholar] [CrossRef] [Green Version]
- Gerlein-Safdi, C.; Bloom, A.A.; Plant, G.; Kort, E.A.; Ruf, C.S. Improving representation of tropical wetland methane emissions with CYGNSS inundation maps. Glob. Biogeochem. Cycles 2021, 35, e2020GB006890. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Podest, E.; Jensen, K.; McDonald, K.C. Classifying inundation in a tropical wetlands complex with GNSS-R. Remote Sens. 2019, 11, 1053. [Google Scholar] [CrossRef] [Green Version]
- Zuffada, C.; Chew, C.; Nghiem, S.V. Global navigation satellite system reflectometry (GNSS-R) algorithms for wetland observations. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1126–1129. [Google Scholar]
- Chew, C.; Small, E. Estimating inundation extent using CYGNSS data: A conceptual modeling study. Remote Sens. Environ. 2020, 246, 111869. [Google Scholar] [CrossRef]
- Setti, P.D.T.; Tabibi, S.; Van Dam, T. CYGNSS GNSS-R Data for Inundation Monitoring in the Brazilian Pantanal Wetland. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 5531–5534. [Google Scholar]
- Yang, W.; Gao, F.; Xu, T.; Wang, N.; Tu, J.; Jing, L.; Kong, Y. Daily Flood Monitoring Based on Spaceborne GNSS-R Data: A Case Study on Henan, China. Remote Sens. 2021, 13, 4561. [Google Scholar] [CrossRef]
- Zhang, G.; Xiao, X.; Dong, J.; Zhang, Y.; Xin, F.; Qin, Y.; Doughty, R.B.; Moor, B., III. Reply to: “Correlation between paddy rice growth and satellite-observed methane column abundance does not imply causation”. Nat. Commun. 2021, 12, 1189. [Google Scholar] [CrossRef]
- Arai, H.; Takeuchi, W.; Oyoshi, K.; Nguyen, L.D.; Inubushi, K. Estimation of Methane Emissions from Rice Paddies in the Mekong Delta Based on Land Surface Dynamics Characterization with Remote Sensing. Remote Sens. 2018, 10, 1438. [Google Scholar] [CrossRef] [Green Version]
- Arai, H. The Anthropogenic Greenhouse Gas Emission from Tropical High Carbon Reservoirs. Chiba University Library Online Public Library Catalog. 2015. Available online: http://opac.ll.chiba-u.jp/da/curator/900119174/HMA_0068.pdf (accessed on 11 April 2018). (In Japanese).
- Arai, H.; Takeuchi, W.; Oyoshi, K.; Nguyen, L.D.; Tachiba, T.; Inubushi, K. Regional evaluation on greenhouse gas-mitigation & yield-increase performance of a water-saving irrigation practice’s dissemination in rice paddies in the Mekong Delta. Monit. Glob. Environ. Disaster Risk Assess. Space IIS Forum Proc. 2018, 26, 43–50. [Google Scholar]
- Van Hong, N.P.; Nga, T.T.; Arai, H.; Hosen, Y.; Chiem, N.H.; Inubushi, K. Rice straw management by farmers in a triple rice production system in the Mekong Delta, Viet Nam. Trop. Agr. Develop. 2014, 58, 155–162. [Google Scholar]
- Arai, H.; Hosen, Y.; Van Hong, N.P.; Chiem, N.H.; Inubushi, K. Greenhouse gas emissions derived from rice straw burning and straw-mushroom cultivation in a triple rice cropping system in the Mekong Delta. Soil Sci. Plant Nutr. 2015, 61, 719–735. [Google Scholar] [CrossRef] [Green Version]
- Arai, H.; Hosen, Y.; Chiem, N.H.; Inubushi, K. Alternate wetting and drying enhanced the yield of a triple-cropping rice paddy of the Mekong Delta. Soil Sci. Plant Nutr. 2021, 67, 493–506. [Google Scholar] [CrossRef]
- Arai, H. Increased rice yield and reduced greenhouse gas emissions through alternate wetting and drying in a triple-cropped rice field in the Mekong Delta. Sci. Total Environ. 2022, 842, 156958. [Google Scholar] [CrossRef] [PubMed]
- Motte, E.; Zribi, M.; Fanise, P.; Egido, A.; Darrozes, J.; Al-Yaari, A.; Baghdadi, N.; Baup, F.; Dayau, S.; Fieuzal, R.; et al. GLORI: A GNSS-R Dual Polarization Airborne Instrument for Land Surface Monitoring. Sensors 2016, 16, 732. [Google Scholar] [CrossRef] [PubMed]
- Pierdicca, N.; Comite, D.; Camps, A.; Carreno-Luengo, H.; Cenci, L.; Clarizia, M.P.; Costantini, F.; Dente, L.; Guerriero, L.; Mollfulleda, A.; et al. Potential of spaceborne GNSS reflectometry for soil moisture, biomass and freeze-thaw monitoring: Summary of an ESA-funded study. IEEE Geosci. Remote Sens. Mag. 2021, 10, 8–38. [Google Scholar] [CrossRef]
- Shimada, M.; Japan Aerospace Exploration Agency-Earth Observation Research Center. ALOS-2 characteristics, CAL/VAL results and operational status. In Proceedings of the ALOS Kyoto & Carbon Initiative 21th Science Team Meeting, Kyoto, Japan, 3–5 December 2014; Available online: http://www.eorc.jaxa.jp/ALOS/kyoto/dec2014_kc21/pdf/3-02_KC21_ALOS-2_Shimada-JAXA.pdf (accessed on 11 April 2018). (In Japanese).
- Singh, G.; Malik, R.; Mohanty, S.; Rathore, V.S.; Yamada, K.; Umemura, M.; Yamaguchi, Y. Seven-component scattering power decomposition of POLSAR coherency matrix. IEEE Trans. Geosci. Remote Sens. 2019, 57, 8371–8382. [Google Scholar] [CrossRef]
- Collett, I.W. Applying GNSS Reflectometry-Based Stare Processing to Modeling and Remote Sensing of Wind-Driven Ocean Surface Roughness. Ph.D. Thesis, University of Colorado at Boulder, Boulder, CO, USA, 2021. [Google Scholar]
- Son, N.T.; Chen, C.F.; Chen, C.R.; Duc, H.N.; Chang, L.Y. A phenology-based classification of time-series MODIS data for rice crop monitorin in Mekong Delta, Vietnam. Remote Sens. 2013, 6, 135–156. [Google Scholar] [CrossRef] [Green Version]
- Loc, H.H.; Lixian, M.L.; Park, E.; Dung, T.D.; Shrestha, S.; Yoon, Y.J. How the saline water intrusion has reshaped the agricultural landscape of the Vietnamese Mekong Delta, a review. Sci. Total Environ. 2021, 794, 148651. [Google Scholar] [CrossRef]
- Le Toan, T.; Huu, N.; Simioni, M.; Phan, H.; Arai, H.; Mermoz, S.; Bouvet, A.; Eccher, I.d.; Diallo, Y.; Duong, T.H.; et al. Agriculture in Viet Nam under the impact of climate change. In Climate Change in Viet Nam. Impacts and Adaptation. A COP26 Assessment Report of the GEMMES Viet Nam Project; 2021, HAL, France. Available online: https://hal.inrae.fr/hal-03456472/file/2021_Simioni_Rapport_AFD_Climate%20change_GEMMES-pages-191-228.pdf (accessed on 1 November 2022).
- Kondolf, G.M.; Schmitt, R.J.P.; Carling, P.A.; Goichot, M.; Keskinen, M.; Arias, M.E.; Bizzi, S.; Castelletti, A.; Cocharane, A.; Darby, S.E.; et al. Save the Mekong Delta from drowning. Science 2022, 376, 583–585. [Google Scholar] [CrossRef]
- Minderhoud, P.S.J.; Erkens, G.; Pham, V.H.; Bui, V.T.; Erban, L.; Kooi, H.; Stouthamer, E. Impacts of 25 years of groundwater extraction on subsidence in the Mekong delta, Vietnam. Environ. Res. Lett. 2017, 12, 064006. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Warnock, A.; Ruf, C.S. The CYGNSS coherent End-to-end simulator: Development and results. IEEE Trans. Geosci. Remote Sens. 2022, 60, 7441–7444. [Google Scholar]
- Bosch-Lluis, X.; Munoz-Martin, J.F.; Rodriguez-Alvarez, N.; Oudrhiri, K. Towards GNSS-R hybrid compact polarimetry: Introducing the stokes parameters for SMAP-R dataset. IEEE Trans. Geosci. Remote Sens. 2022, 60, 7425–7428. [Google Scholar]
- Camps, A. Spatial resolution in GNSS-R under coherent scattering. IEEE Trans. Geosci. Remote Sens. 2019, 17, 32–36. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arai, H.; Zribi, M.; Oyoshi, K.; Dassas, K.; Huc, M.; Sobue, S.; Toan, T.L. Quality Control of CyGNSS Reflectivity for Robust Spatiotemporal Detection of Tropical Wetlands. Remote Sens. 2022, 14, 5903. https://doi.org/10.3390/rs14225903
Arai H, Zribi M, Oyoshi K, Dassas K, Huc M, Sobue S, Toan TL. Quality Control of CyGNSS Reflectivity for Robust Spatiotemporal Detection of Tropical Wetlands. Remote Sensing. 2022; 14(22):5903. https://doi.org/10.3390/rs14225903
Chicago/Turabian StyleArai, Hironori, Mehrez Zribi, Kei Oyoshi, Karin Dassas, Mireille Huc, Shinichi Sobue, and Thuy Le Toan. 2022. "Quality Control of CyGNSS Reflectivity for Robust Spatiotemporal Detection of Tropical Wetlands" Remote Sensing 14, no. 22: 5903. https://doi.org/10.3390/rs14225903