
IOAM: A Novel Sensor Fusion-Based Wearable for Localization and Mapping


 ,
,  ,
, 
Abstract
:1. Introduction
- A novel dual trajectory fusion (DTF) via CBoM projection by replacing the two-foot trajectory with a CBoM-level trajectory using a sine curve weighting method. The fused result demonstrated a stable and smooth trajectory, thereby improving the description of the tracking information.
- An improved dual-foot INS method with minimum centroid distance (MCD) constraining stride length estimation via inner ultrasound ranging and gait analysis. The tracking estimation exhibited a lower RMSE and deviation among all subjects compared with typical approaches.
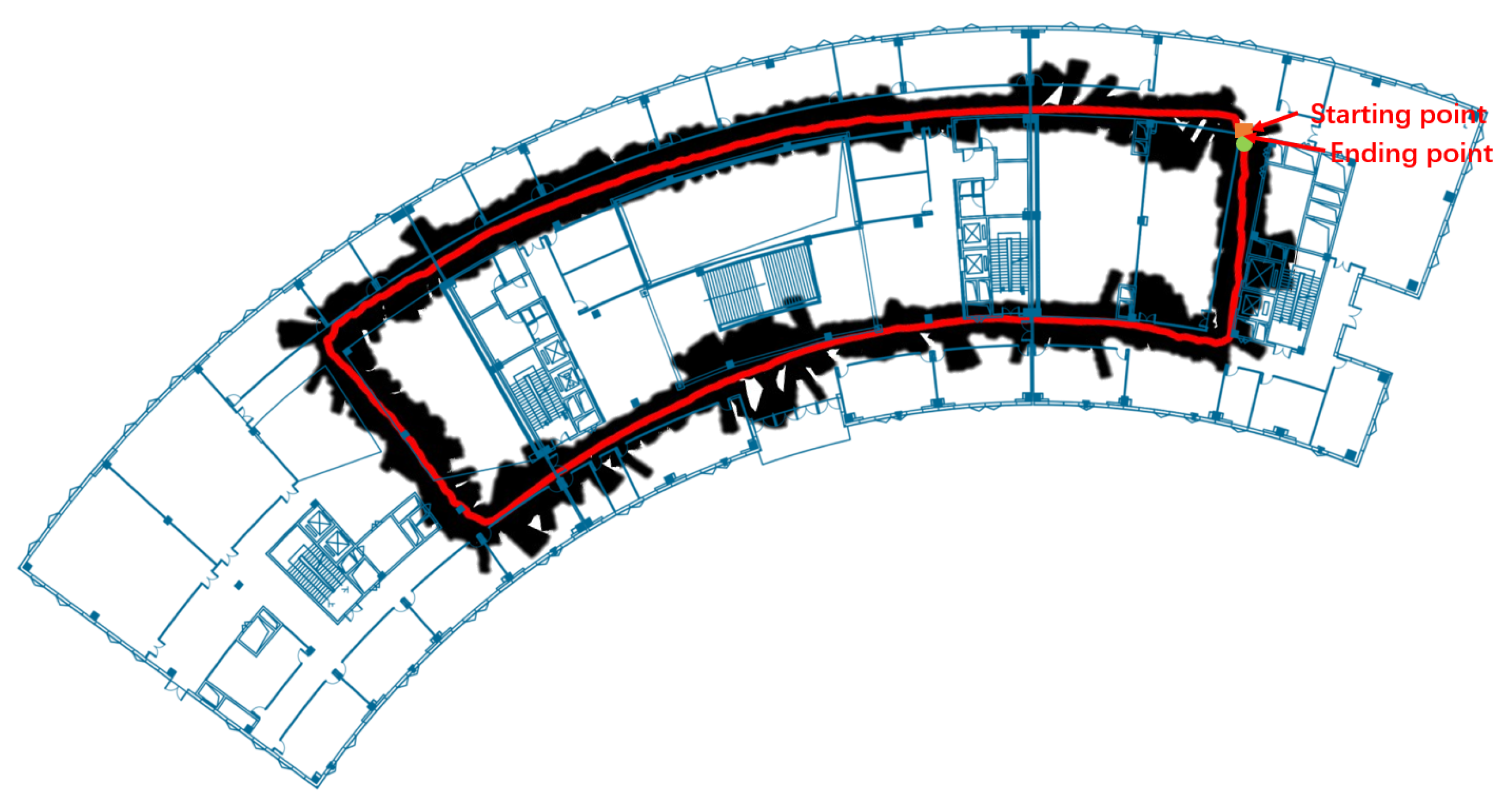
- An ultrasound-ranging-based structure-mapping method that utilizes an occupancy grid map and sphere projection. The mapping results match well with the reference layout, indicating good map reconstruction performance.
2. Materials and Methods
2.1. System Overview
2.2. MCD Aided INS for Dual Foot Fusion
2.2.1. EKF Initialization
2.2.2. MCD
2.3. Projection of CBoM for DTF
2.4. Ultrasound Mapping
2.4.1. Sphere Projection Mechanism
2.4.2. S-OGM Calculation
3. Results
3.1. Experimental Setup
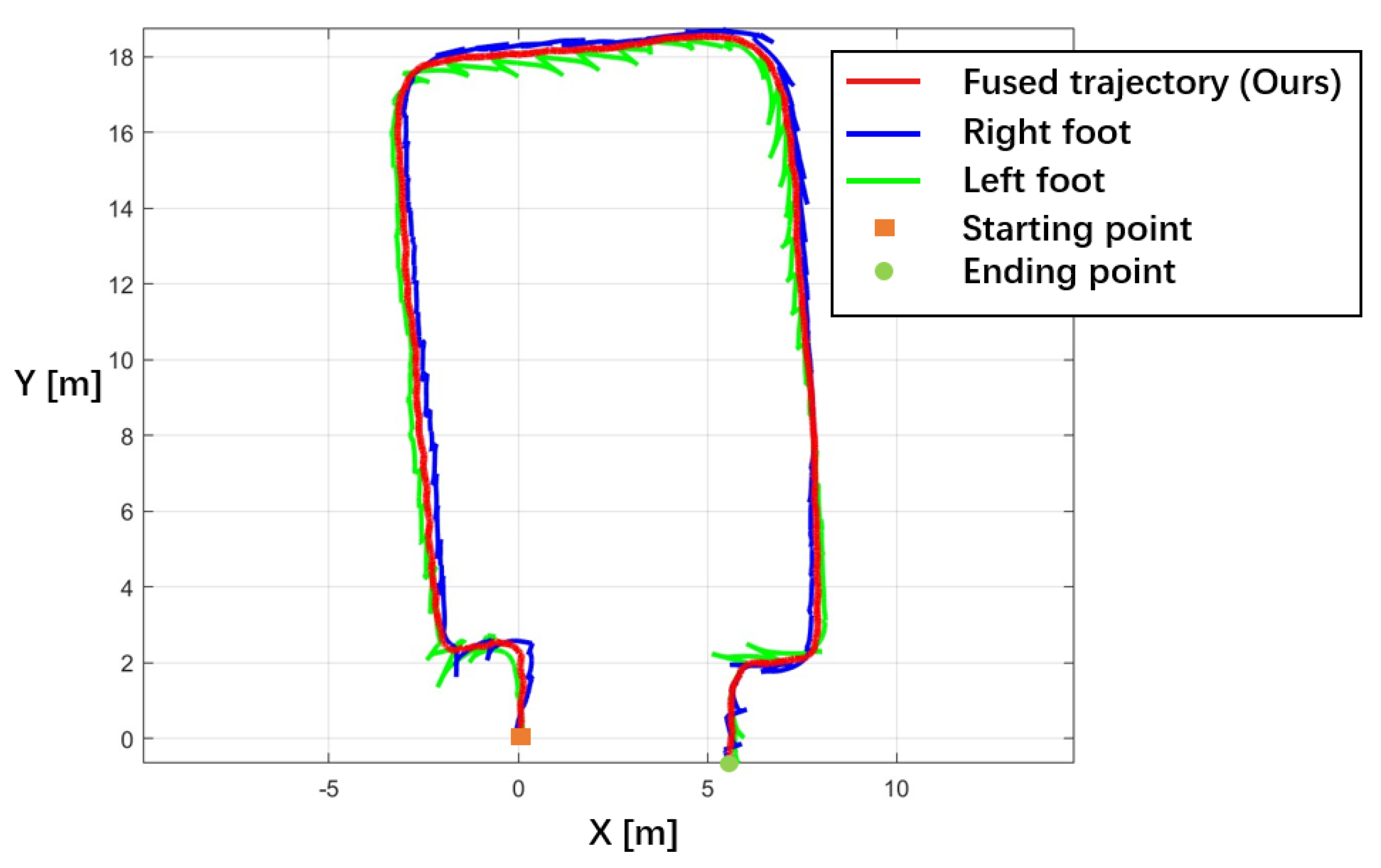
3.2. Trajectory Fusion
3.3. Tracking Performance
3.3.1. Scenario 1
3.3.2. Scenario 2
3.3.3. Scenario 3
3.4. Mapping Estimation
3.5. Computation
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Basiri, A.; Lohan, E.S.; Moore, T.; Winstanley, A.; Peltola, P.; Hill, C.; Amirian, P.; e Silva, P.F. Indoor location based services challenges, requirements and usability of current solutions. Comput. Sci. Rev. 2017, 24, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Pirzada, N.; Nayan, M.Y.; Subhan, F.; Hassan, M.F.; Khan, M.A. Comparative analysis of active and passive indoor localization systems. Aasri Procedia 2013, 5, 92–97. [Google Scholar] [CrossRef]
- Zhu, N.; Marais, J.; Bétaille, D.; Berbineau, M. GNSS position integrity in urban environments: A review of literature. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2762–2778. [Google Scholar] [CrossRef] [Green Version]
- Zwirello, L.; Schipper, T.; Harter, M.; Zwick, T. UWB localization system for indoor applications: Concept, realization and analysis. J. Electr. Comput. Eng. 2012, 2012, 849638. [Google Scholar] [CrossRef] [Green Version]
- Kotaru, M.; Joshi, K.; Bharadia, D.; Katti, S. Spotfi: Decimeter level localization using wifi. In Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication, London, UK, 17–21 August 2015; pp. 269–282. [Google Scholar]
- Ssekidde, P.; Steven Eyobu, O.; Han, D.S.; Oyana, T.J. Augmented CWT features for deep learning-based indoor localization using WiFi RSSI data. Appl. Sci. 2021, 11, 1806. [Google Scholar] [CrossRef]
- Thaljaoui, A.; Val, T.; Nasri, N.; Brulin, D. BLE localization using RSSI measurements and iRingLA. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 2178–2183. [Google Scholar]
- Zhou, J.; Shi, J. RFID localization algorithms and applications—A review. J. Intell. Manuf. 2009, 20, 695–707. [Google Scholar] [CrossRef]
- Monica, S.; Ferrari, G. UWB-based localization in large indoor scenarios: Optimized placement of anchor nodes. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 987–999. [Google Scholar] [CrossRef] [Green Version]
- Castle, R.O.; Gawley, D.J.; Klein, G.; Murray, D.W. Towards simultaneous recognition, localization and mapping for hand-held and wearable cameras. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4102–4107. [Google Scholar]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef] [Green Version]
- Wu, R.; Pike, M.; Lee, B.G. DT-SLAM: Dynamic Thresholding Based Corner Point Extraction in SLAM System. IEEE Access 2021, 9, 91723–91729. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. Hybrid indoor localization using IMU sensors and smartphone camera. Sensors 2019, 19, 5084. [Google Scholar] [CrossRef]
- Campos, C.; Elvira, R.; Rodríguez, J.J.G.; Montiel, J.M.; Tardós, J.D. Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam. IEEE Trans. Robot. 2021, 37, 1874–1890. [Google Scholar] [CrossRef]
- Shin, Y.S.; Kim, A. Sparse depth enhanced direct thermal-infrared SLAM beyond the visible spectrum. IEEE Robot. Autom. Lett. 2019, 4, 2918–2925. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.U.; Zaidi, S.A.A.; Ishtiaq, A.; Bukhari, S.U.R.; Samer, S.; Farman, A. A comparative survey of lidar-slam and lidar based sensor technologies. In Proceedings of the 2021 Mohammad Ali Jinnah University International Conference on Computing (MAJICC), Karachi, Pakistan, 15–17 July 2021; pp. 1–8. [Google Scholar]
- Mandischer, N.; Eddine, S.C.; Huesing, M.; Corves, B. Radar slam for autonomous indoor grinding. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef] [Green Version]
- Chang, L.; Qin, F.; Jiang, S. Strapdown inertial navigation system initial alignment based on modified process model. IEEE Sens. J. 2019, 19, 6381–6391. [Google Scholar] [CrossRef]
- Niu, X.; Liu, T.; Kuang, J.; Zhang, Q.; Guo, C. Pedestrian Trajectory Estimation Based on Foot-Mounted Inertial Navigation System for Multistory Buildings in Postprocessing Mode. IEEE Internet Things J. 2021, 9, 6879–6892. [Google Scholar] [CrossRef]
- Nilsson, J.O.; Skog, I.; Händel, P.; Hari, K. Foot-mounted INS for everybody-an open-source embedded implementation. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium, Savannah, GA, USA, 11–14 April 2016; pp. 140–145. [Google Scholar]
- Nilsson, J.O.; Gupta, A.K.; Händel, P. Foot-mounted inertial navigation made easy. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 27–30 October 2014; pp. 24–29. [Google Scholar]
- Jao, C.S.; Stewart, K.; Conradt, J.; Neftci, E.; Shkel, A. Zero velocity detector for foot-mounted inertial navigation system assisted by a dynamic vision sensor. In Proceedings of the 2020 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 15–16 September 2020; pp. 1–18. [Google Scholar]
- Wang, Z.; Zhao, H.; Qiu, S.; Gao, Q. Stance-phase detection for ZUPT-aided foot-mounted pedestrian navigation system. IEEE/ASME Trans. Mechatronics 2015, 20, 3170–3181. [Google Scholar] [CrossRef]
- Wagstaff, B.; Peretroukhin, V.; Kelly, J. Improving foot-mounted inertial navigation through real-time motion classification. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Chen, C.; Zhao, P.; Lu, C.X.; Wang, W.; Markham, A.; Trigoni, N. Deep-learning-based pedestrian inertial navigation: Methods, data set, and on-device inference. IEEE Internet Things J. 2020, 7, 4431–4441. [Google Scholar] [CrossRef] [Green Version]
- Prateek, G.; Girisha, R.; Hari, K.; Händel, P. Data fusion of dual foot-mounted INS to reduce the systematic heading drift. In Proceedings of the 2013 4th International Conference on Intelligent Systems, Modelling and Simulation, Washington, DC, USA, 29–31 January 2013; pp. 208–213. [Google Scholar]
- Zhao, H.; Wang, Z.; Qiu, S.; Shen, Y.; Zhang, L.; Tang, K.; Fortino, G. Heading drift reduction for foot-mounted inertial navigation system via multi-sensor fusion and dual-gait analysis. IEEE Sens. J. 2018, 19, 8514–8521. [Google Scholar] [CrossRef]
- Wang, Q.; Cheng, M.; Noureldin, A.; Guo, Z. Research on the improved method for dual foot-mounted Inertial/Magnetometer pedestrian positioning based on adaptive inequality constraints Kalman Filter algorithm. Measurement 2019, 135, 189–198. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Li, H.; Yang, H.; Xia, Y. Altimeter+ INS/giant LEO constellation dual-satellite integrated navigation and positioning algorithm based on similar ellipsoid model and UKF. Remote. Sens. 2021, 13, 4099. [Google Scholar] [CrossRef]
- Niu, X.; Li, Y.; Kuang, J.; Zhang, P. Data fusion of dual foot-mounted IMU for pedestrian navigation. IEEE Sens. J. 2019, 19, 4577–4584. [Google Scholar] [CrossRef]
- Chen, C.; Jao, C.S.; Shkel, A.M.; Kia, S.S. UWB Sensor Placement for Foot-to-Foot Ranging in Dual-Foot-Mounted ZUPT-Aided INS. IEEE Sens. Lett. 2022, 6, 5500104. [Google Scholar] [CrossRef]
- Kingma, I.; Toussaint, H.M.; Commissaris, D.A.; Hoozemans, M.J.; Ober, M.J. Optimizing the determination of the body center of mass. J. Biomech. 1995, 28, 1137–1142. [Google Scholar] [CrossRef] [PubMed]
- Pai, Y.C.; Patton, J. Center of mass velocity-position predictions for balance control. J. Biomech. 1997, 30, 347–354. [Google Scholar] [CrossRef] [PubMed]
- Pavei, G.; Seminati, E.; Cazzola, D.; Minetti, A.E. On the estimation accuracy of the 3D body center of mass trajectory during human locomotion: Inverse vs. forward dynamics. Front. Physiol. 2017, 8, 129. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.X. Low-cost experimental system for center of mass and center of pressure measurement (June 2018). IEEE Access 2018, 6, 45021–45033. [Google Scholar] [CrossRef]
- Pavei, G.; Salis, F.; Cereatti, A.; Bergamini, E. Body center of mass trajectory and mechanical energy using inertial sensors: A feasible stride? Gait Posture 2020, 80, 199–205. [Google Scholar] [CrossRef]
- Zhou, B.; Ma, W.; Li, Q.; El-Sheimy, N.; Mao, Q.; Li, Y.; Gu, F.; Huang, L.; Zhu, J. Crowdsourcing-based indoor mapping using smartphones: A survey. Isprs J. Photogramm. Remote. Sens. 2021, 177, 131–146. [Google Scholar] [CrossRef]
- Matsuki, H.; Scona, R.; Czarnowski, J.; Davison, A.J. Codemapping: Real-time dense mapping for sparse slam using compact scene representations. IEEE Robot. Autom. Lett. 2021, 6, 7105–7112. [Google Scholar] [CrossRef]
- Woodman, O.J. An Introduction to Inertial Navigation; Report; University of Cambridge, Computer Laboratory: Cambridge, UK, 2007. [Google Scholar]
- Girisha, R.; Prateek, G.; Hari, K.; Händel, P. Fusing the navigation information of dual foot-mounted zero-velocity-update-aided inertial navigation systems. In Proceedings of the 2014 International Conference on Signal Processing and Communications (SPCOM), Bangalore, India, 22–25 July 2014; pp. 1–6. [Google Scholar]
- Thrun, S. Learning occupancy grid maps with forward sensor models. Auton. Robot. 2003, 15, 111–127. [Google Scholar] [CrossRef]
- Chu, B. Position compensation algorithm for omnidirectional mobile robots and its experimental evaluation. Int. J. Precis. Eng. Manuf. 2017, 18, 1755–1762. [Google Scholar] [CrossRef]
- Rukundo, O.; Cao, H. Nearest neighbor value interpolation. arXiv 2012, arXiv:1211.1768. [Google Scholar]
- Skog, I.; Handel, P.; Nilsson, J.O.; Rantakokko, J. Zero-velocity detection—An algorithm evaluation. IEEE Trans. Biomed. Eng. 2010, 57, 2657–2666. [Google Scholar] [CrossRef] [PubMed]
- Fischer, C.; Sukumar, P.T.; Hazas, M. Tutorial: Implementing a pedestrian tracker using inertial sensors. IEEE Pervasive Comput. 2012, 12, 17–27. [Google Scholar] [CrossRef]
- Rajagopal, S. Personal Dead Reckoning System with Shoe Mounted Inertial Sensors. Master’s Thesis, KTH Electrical Engineering, Stockholm, Sweden, 2008. [Google Scholar]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef]
- Bector, C.; Chandra, S. On incomplete Lagrange function and saddle point optimality criteria in mathematical programming. J. Math. Anal. Appl. 2000, 251, 2–12. [Google Scholar] [CrossRef] [Green Version]
- Gander, W. Least squares with a quadratic constraint. Numer. Math. 1980, 36, 291–307. [Google Scholar] [CrossRef]
- Liew, C.K. Inequality constrained least-squares estimation. J. Am. Stat. Assoc. 1976, 71, 746–751. [Google Scholar] [CrossRef]
- Jacquelin Perry, M. Gait Analysis: Normal and Pathological Function; SLACK: Thorofare, NJ, USA, 2010. [Google Scholar]
- Aggarwal, J.K.; Cai, Q. Human motion analysis: A review. Comput. Vis. Image Underst. 1999, 73, 428–440. [Google Scholar] [CrossRef]
- Posa, M.; Cantu, C.; Tedrake, R. A direct method for trajectory optimization of rigid bodies through contact. Int. J. Robot. Res. 2014, 33, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Wu, R.; Pike, M.; Chai, X.; Lee, B.G.; Wu, X. SLAM-ING: A Wearable SLAM Inertial NaviGation System. In Proceedings of the 2022 IEEE SENSORS Conference, Dallas, TX, USA, 30 October–2 November 2022. [Google Scholar]
- Komura, T.; Nagano, A.; Leung, H.; Shinagawa, Y. Simulating pathological gait using the enhanced linear inverted pendulum model. IEEE Trans. Biomed. Eng. 2005, 52, 1502–1513. [Google Scholar] [CrossRef] [PubMed]
- Buczek, F.L.; Cooney, K.M.; Walker, M.R.; Rainbow, M.J.; Concha, M.C.; Sanders, J.O. Performance of an inverted pendulum model directly applied to normal human gait. Clin. Biomech. 2006, 21, 288–296. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.; Liu, J. A method of the body of mass trajectory for human gait analysis. Inf. Technol. 2016, 40, 147–150. [Google Scholar]
- Shi, Y.; Meng, L.; Chen, D. Human standing-up trajectory model and experimental study on center-of-mass velocity. Proc. IOP Conf. Ser. Mater. Sci. Eng. 2019, 612, 022088. [Google Scholar] [CrossRef]
- Whittle, M.W. Three-dimensional motion of the center of gravity of the body during walking. Hum. Mov. Sci. 1997, 16, 347–355. [Google Scholar] [CrossRef]
- Tsai, F.; Philpot, W. Derivative analysis of hyperspectral data. Remote. Sens. Environ. 1998, 66, 41–51. [Google Scholar] [CrossRef]
- Burger, H.A. Use of Euler-rotation angles for generating antenna patterns. IEEE Antennas Propag. Mag. 1995, 37, 56–63. [Google Scholar] [CrossRef]
- Weisstein, E.W. Euler Angles. 2009. Available online: https://mathworld.wolfram.com/ (accessed on 20 June 2022).
- Qiu, Z.; Lu, Y.; Qiu, Z. Review of Ultrasonic Ranging Methods and Their Current Challenges. Micromachines 2022, 13, 520. [Google Scholar] [CrossRef]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE). Geosci. Model Dev. Discuss. 2014, 7, 1525–1534. [Google Scholar]
- Shi, W.; Wang, Y.; Wu, Y. Dual MIMU pedestrian navigation by inequality constraint Kalman filtering. Sensors 2017, 17, 427. [Google Scholar] [CrossRef]
- Forster, C.; Zhang, Z.; Gassner, M.; Werlberger, M.; Scaramuzza, D. SVO: Semidirect visual odometry for monocular and multicamera systems. IEEE Trans. Robot. 2016, 33, 249–265. [Google Scholar] [CrossRef]
- Pumarola, A.; Vakhitov, A.; Agudo, A.; Sanfeliu, A.; Moreno-Noguer, F. PL-SLAM: Real-time monocular visual SLAM with points and lines. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4503–4508. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Voltage | DC 5 V |
| Accelerometer Scale Range | ±16 g |
| Gyroscope Scale Range | ±2000°/s |
| Communication Interface | IC |
| Sampling Rate | 200 Hz |
| Operating Voltage | DC 5V |
| Operating Current | 15 mA |
| Operating Frequency | 40 kHz |
| Range | 2 cm–5 m |
| Ranging Accuracy | 3 mm |
| Measuring Angle | 15 degrees |
| Trigger Input Signal | 10 µS TTL Pulse |
| Sampling rate | 15 Hz |
| Participants Name | Gender | Height (cm) | Weight (kg) |
|---|---|---|---|
| a | male | 175 | 65 |
| b | male | 185 | 85 |
| c | female | 163 | 50 |
| d | female | 163 | 50 |
| e | male | 175 | 70 |
| f | male | 172 | 53 |
| g | male | 170 | 55 |
| h | female | 170 | 47 |
| RMSE of INS w/MCD (Ours) | Error Rate (%) w/MCD (Ours) | RMSE of INS w/o MCD | Error Rate (%) w/o MCD | |
|---|---|---|---|---|
| a | 0.5379 | 0.3336 | 2.1955 | 1.3617 |
| b | 0.3532 | 0.2191 | 1.1144 | 0.6911 |
| c | 2.7249 | 1.6900 | 6.2353 | 3.8673 |
| d | 0.8919 | 0.5532 | 8.4962 | 5.2696 |
| e | 2.7604 | 1.7121 | 3.6228 | 2.2470 |
| f | 0.2883 | 0.1788 | 1.2563 | 0.7792 |
| g | 0.5602 | 0.3475 | 1.0193 | 0.6322 |
| h | 0.3288 | 0.2039 | 0.5659 | 0.3510 |
| Ave./std. | 1.06/1.06 | 0.65/0.67 | 3.06/2.88 | 1.90/1.79 |
| RMSE of INS w/MCD (Ours) | Error Rate (%) w/MCD (Ours) | RMSE of INS w/o MCD | Error Rate (%) w/o MCD | |
|---|---|---|---|---|
| a | 6.3940 | 3.2203 | 6.8789 | 3.4646 |
| b | 0.3872 | 0.1950 | 2.2238 | 1.1200 |
| c | 0.5804 | 0.2923 | 1.1148 | 0.5615 |
| d | 1.8863 | 0.9500 | 4.9937 | 2.5151 |
| e | 3.9305 | 1.9796 | 12.8300 | 6.4618 |
| f | 0.7258 | 0.3656 | 4.5777 | 2.3055 |
| g | 1.5246 | 0.7679 | 2.6720 | 1.3458 |
| h | 1.2124 | 0.6106 | 3.4168 | 1.7209 |
| Ave./std. | 2.08/1.94 | 1.05/1.04 | 4.84/3.69 | 2.44/1.86 |
| RMSE of INS w/MCD x-Axis (Ours) | RMSE of INS w/o MCD x-Axis | RMSE of INS w/MCD (Ours) y-Axis | RMSE of INS w/o MCD y-Axis | |
|---|---|---|---|---|
| a | 0.2683 | 0.9455 | 0.2487 | 0.4796 |
| b | 0.0555 | 0.5377 | 0.5687 | 0.4673 |
| c | 0.1094 | 0.1302 | 0.1078 | 0.1191 |
| d | 0.6010 | 0.6885 | 0.1635 | 0.5125 |
| e | 0.9144 | 2.1886 | 1.1010 | 0.8462 |
| f | 0.8375 | 1.0648 | 0.3946 | 0.2835 |
| g | 0.7068 | 1.1101 | 0.1102 | 0.3071 |
| h | 0.0859 | 0.1152 | 0.5443 | 1.2367 |
| Ave./std. | 0.45/0.36 | 0.85/0.67 | 0.40/0.34 | 0.53/0.36 |
| Method | Dataset | Localization (ms/f) | Mapping (ms/f) |
|---|---|---|---|
| IOAM | Self-collected dataset | 0.26 | 4.27 |
| Centroid-INS [41] | Self-collected dataset | 0.20 | - |
| ORB-SLAM3 [14] | EuRoc | 32.45 | 60.08 |
| SVO [67] | EuRoc | 23.4 | 121.0 |
| PL-SLAM [68] | TUM | 51.6 | 323.85 |
| Ref. | Sensor | Method | Scenario | Performance Metrics |
|---|---|---|---|---|
| [20] | IMU | INS with closing points and smoothing algorithm; trajectory matching algorithm | 1500 m repeated circular path | RMS: 0.5 m |
| [23] | IMU ADIS16495, cameraDVS128 | Dynamic vision assisted zero velocity detector | 160 m indoor close-loop route | CEP: 0.9 m |
| [24] | IMU Memsense Nano | Adaptive stance-phase detection | 100 m in a close-loop area | RMSE: 0.85 m |
| [25] | IMUMIMU22BTP(X), motion capture system | SVM, motion type classifier | 1000 m hallway | MEPE: 2.68 m |
| [26] | IMU InvenSense 20600 | DNN-based trajectory reconstruction | Office building on two separate floors (about 1650 and 2475 m) | N/A |
| [27] | IMU MPU9150 | Spacial range constraint | indoor building | RMSE > 2 m |
| [28] | IMU ADIS16448 | Multi-sensor fusion for dual-gait analysis | 100 m straight route, 345 m rectangle route | RMSE: 2.54 m |
| [29] | IMUMTi-G710 | Adaptive inequality constraints | 87.2 m straight route, 120 m L-shaped route | PE: 2.5 m |
| Ours | IMU MPU9250 | MCD | Three different indoor buildings | RMSE: 1.2 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, R.; Lee, B.G.; Pike, M.; Zhu, L.; Chai, X.; Huang, L.; Wu, X. IOAM: A Novel Sensor Fusion-Based Wearable for Localization and Mapping. Remote Sens. 2022, 14, 6081. https://doi.org/10.3390/rs14236081
Wu R, Lee BG, Pike M, Zhu L, Chai X, Huang L, Wu X. IOAM: A Novel Sensor Fusion-Based Wearable for Localization and Mapping. Remote Sensing. 2022; 14(23):6081. https://doi.org/10.3390/rs14236081
Chicago/Turabian StyleWu, Renjie, Boon Giin Lee, Matthew Pike, Linzhen Zhu, Xiaoqing Chai, Liang Huang, and Xian Wu. 2022. "IOAM: A Novel Sensor Fusion-Based Wearable for Localization and Mapping" Remote Sensing 14, no. 23: 6081. https://doi.org/10.3390/rs14236081
APA StyleWu, R., Lee, B. G., Pike, M., Zhu, L., Chai, X., Huang, L., & Wu, X. (2022). IOAM: A Novel Sensor Fusion-Based Wearable for Localization and Mapping. Remote Sensing, 14(23), 6081. https://doi.org/10.3390/rs14236081