1. Introduction
The Arctic has experienced an average warming of more than twice as high as the global mean temperature over the past few decades [
1]. This warming is causing widespread degradation of permafrost, reducing ground stability and causing substantial landscape changes (e.g., [
2]). Numerous studies report an increase in landscape disturbances in permafrost regions with high ground ice content (e.g., [
3,
4]). The observed landscape dynamics are caused by, but not limited to, processes such as thaw slumping, landslides, thermokarst, and ground subsidence [
2,
5]. These landscape changes entail far-reaching ecosystem modifications affecting the water, heat, and nutrient balances as well as devastating consequences for infrastructure in Arctic communities (e.g., [
6,
7,
8]). Models project
of Arctic infrastructure to be affected by near surface permafrost degradation by 2050, affecting approximately 3.6 million people [
9]. Many Arctic communities report damages to their residential buildings, sewage, and water supply systems, two thirds of them occurring since 2019 alone [
10]. As most Arctic infrastructure is remote and affected by access limitations due to logistical and climatic challenges, instantaneous maintenance or restoration in case of a failure often is extremely challenging, potentially leaving flooded or damaged “lifelines” such as roads impassable for several weeks and even months. These data underline the necessity of reliable monitoring techniques of landscape-scale permafrost degradation in order to quantify risks for infrastructure and protect infrastructural elements. With the recent generation of low-cost and easy-to-operate unoccupied aerial vehicles (UAVs), an opportunity emerges to provide fast and cost-effective monitoring of 3D ground surface changes along infrastructural elements that is both sufficiently detailed as well as easy to operate by local citizens. The use of these UAVs, therefore, presents an asset to local environmental observers or emerging citizen science projects, such as the UndercoverEisAgenten (
www.undercovereisagenten.org, accessed on 28 November 2022)—a project in which students in Canada and Germany work together to understand permafrost degradation processes by analysing image data acquired with a low-level UAV setup.
Several studies have already used UAVs to monitor land surface changes attributed to permafrost thaw. Successfully monitoring retrogressive thaw slumps [
11,
12], quantifying changes in sediment volume [
13,
14], and deriving land surface displacements at road embankments [
14] show the potential of UAVs for thorough change detection at the centimeter-scale.
These studies, however, apply technically advanced real-time kinematics (RTK) drones or complementary differential GPS (dGPS) measurements for creating ground control points, as reliable spatial referencing for multi-temporal analysis is a known challenge in tundra landscapes due to unstable ground and limited features that can be used as permanent spatial reference points.
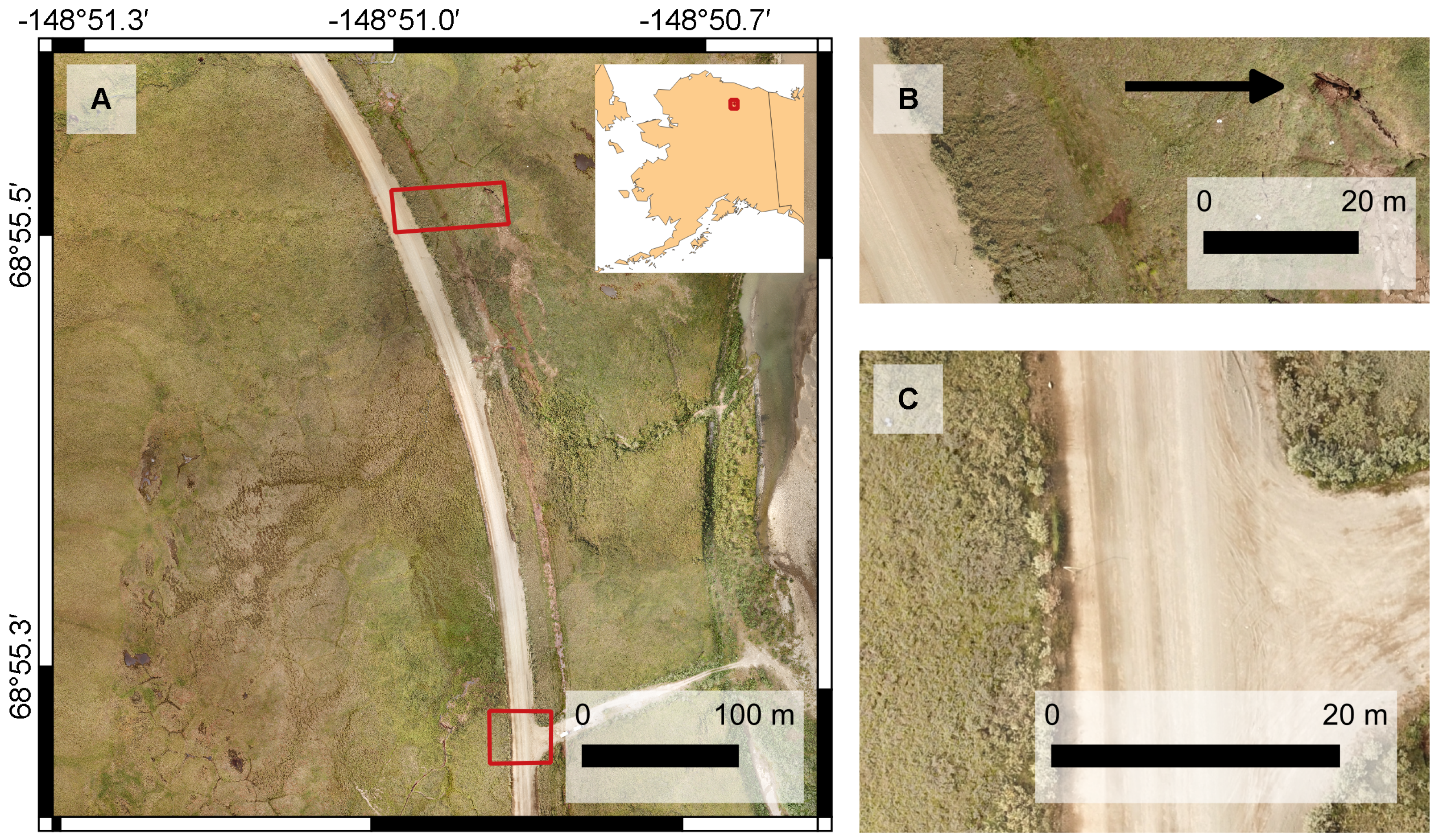
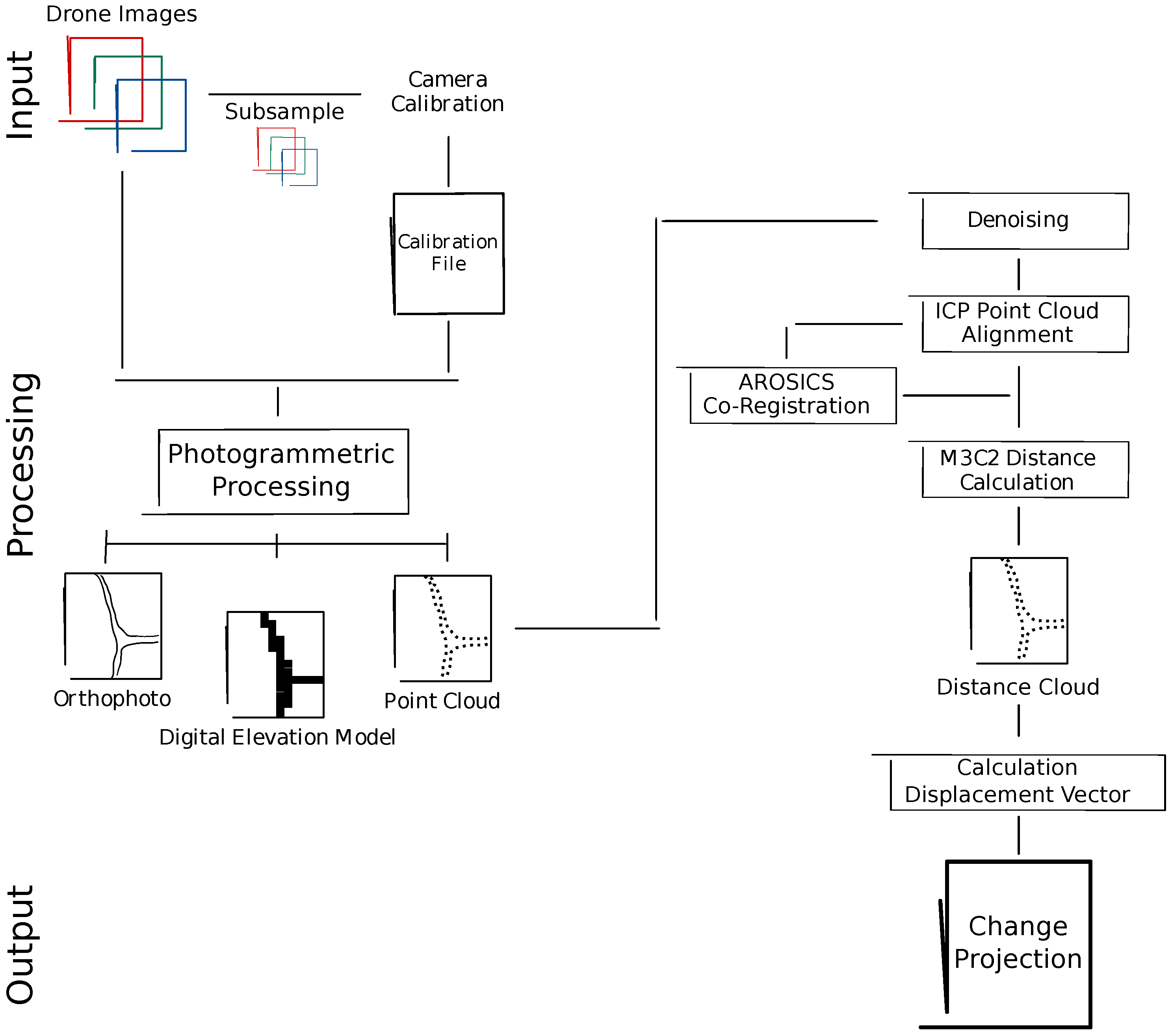
In this study, we therefore evaluate the use of an off-the-shelf, low-cost, non-RTK UAV without the application of ground control points for detecting local ground surface changes caused by permafrost degradation and determine the usefulness of this simplified approach to assess short-term risks to Arctic infrastructure. Ground control points are only used in a final quality assessment to demonstrate spatial accuracy. In particular, we apply Structure from Motion (SfM) for generating 3D point clouds from the 2D drone images to quantify sub-meter changes of an erosion feature close to the Dalton Highway, a key supply line that is essential to the Prudhoe Bay oil industry. Finally, we estimate future risks to the highway by deriving the magnitude and direction of the permafrost erosion process as observed with the UAV data. In order to design a UAV-based risk assessment workflow that would provide local environmental observers, communities, and citizen scientists with the needed tools at no extra costs, we follow the precondition to only use open-source and free software.
4. Discussion
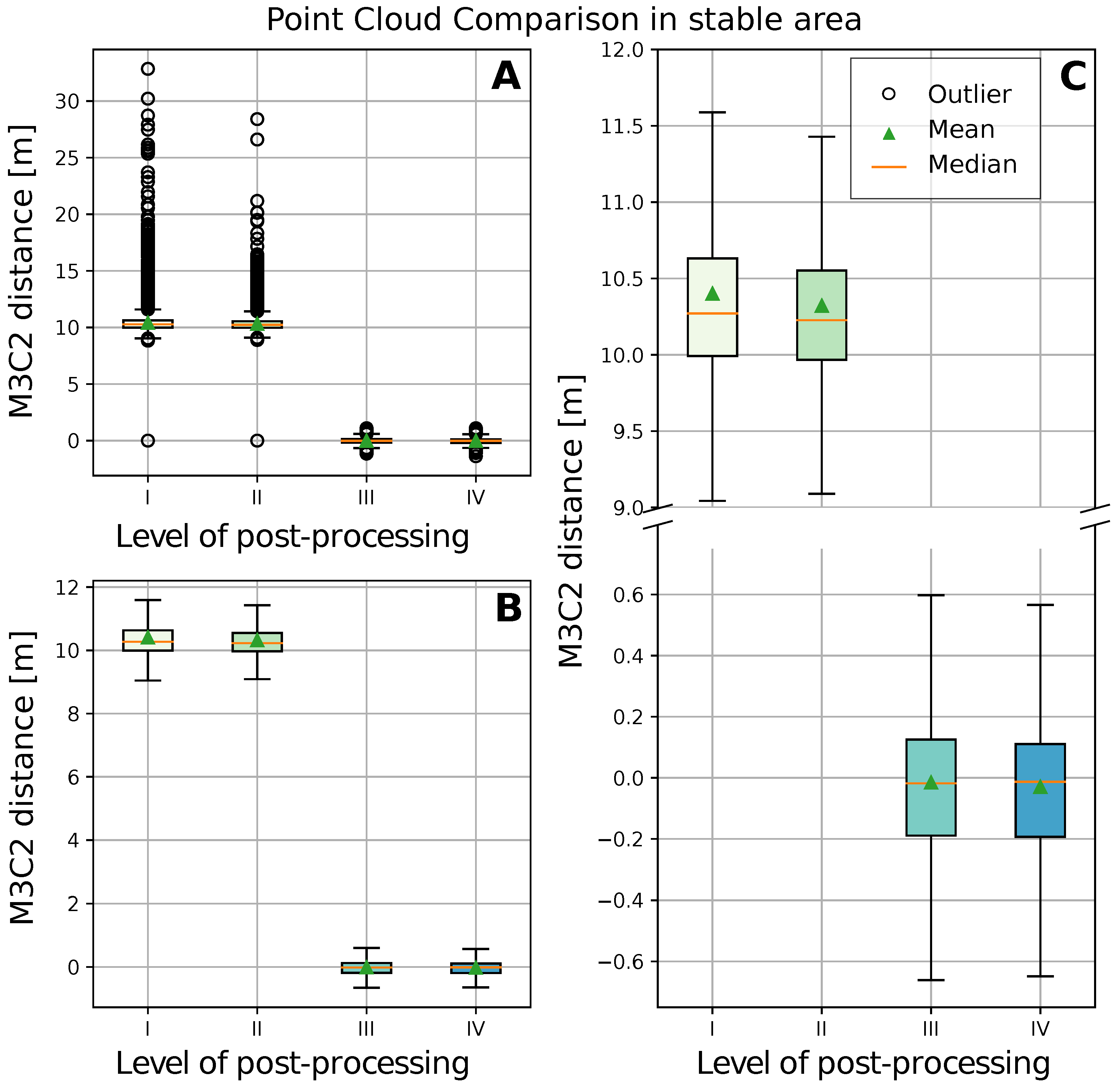
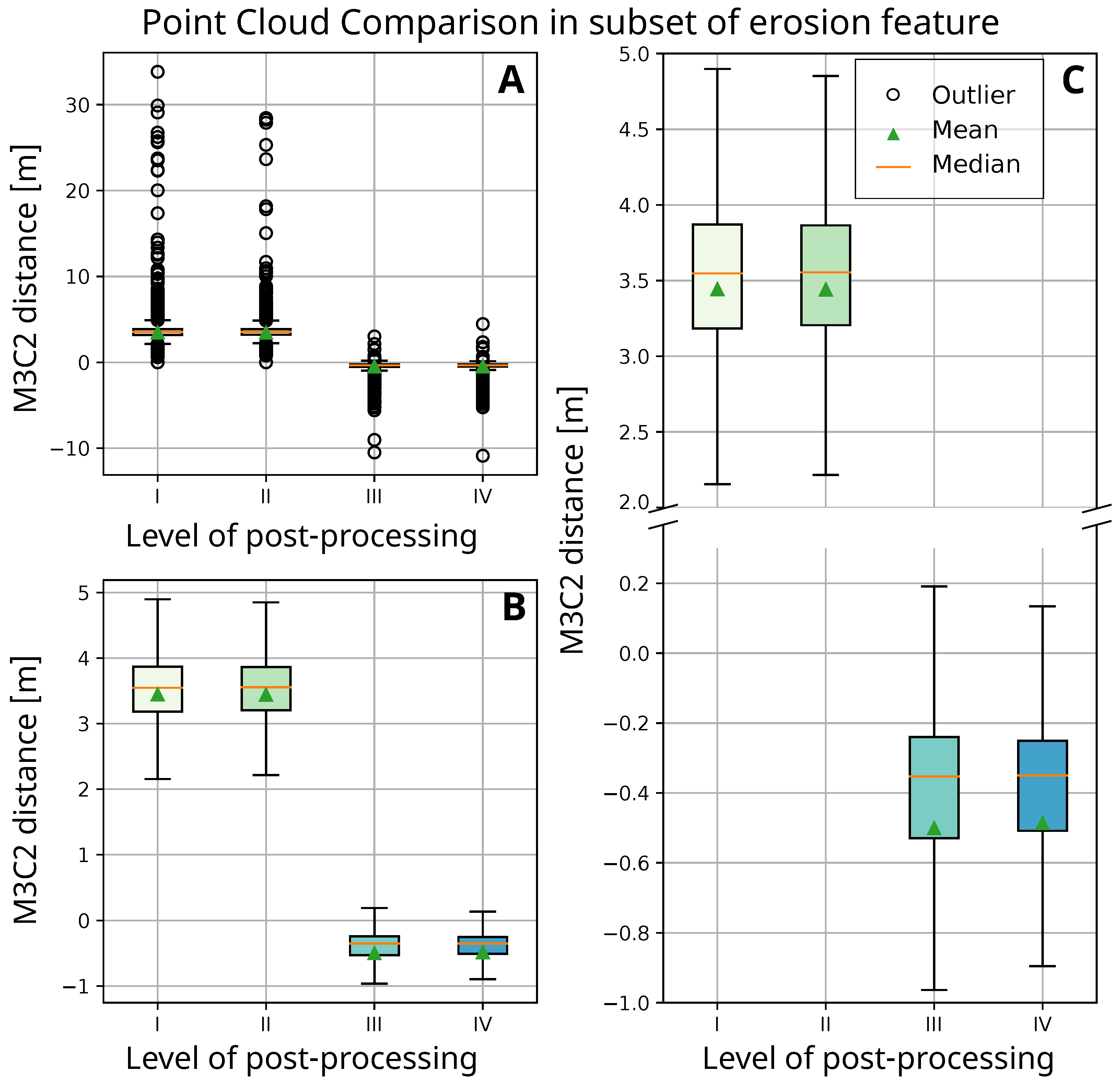
The proposed workflow substantially improved the quality of the point cloud comparison. By denoising the high-resolution point clouds with kNN4, we eliminated outliers and reduced the number of points to
of the original amount. Despite the self-calibration of the lens post-flight (see
Section 2.3.1), we observed an overestimation of a depression west of the Dalton Highway in the 2018 processed point cloud. This, in combination with the less accurate on-board GPS sensor, led to the high elevation offset of
as described in
Section 3.1.1. However, using the ICP substantially reduced this relict of parallel flight path acquisition to a minimum of
vertically. Adding the step of the AROSICS registration beforehand further decreased the horizontal offset by a factor of six (from
under post-processing level III to
under level IV). Reducing the horizontal offset is essential when evaluating directional land surface changes that potentially pose a threat to infrastructure such as the Dalton Highway. The visual examination revealed that the AROSICS correction was very efficient but mostly along the culverts in the center of the image. AROSICS successfully identified these structures as valuable tie points. Reaching the edges of the image, the recognition of suitable tie points became more challenging due to the lack of unique features or sharp contrasts of tundra landscapes. This led to a consistent offset of several meters along the edges of the image.
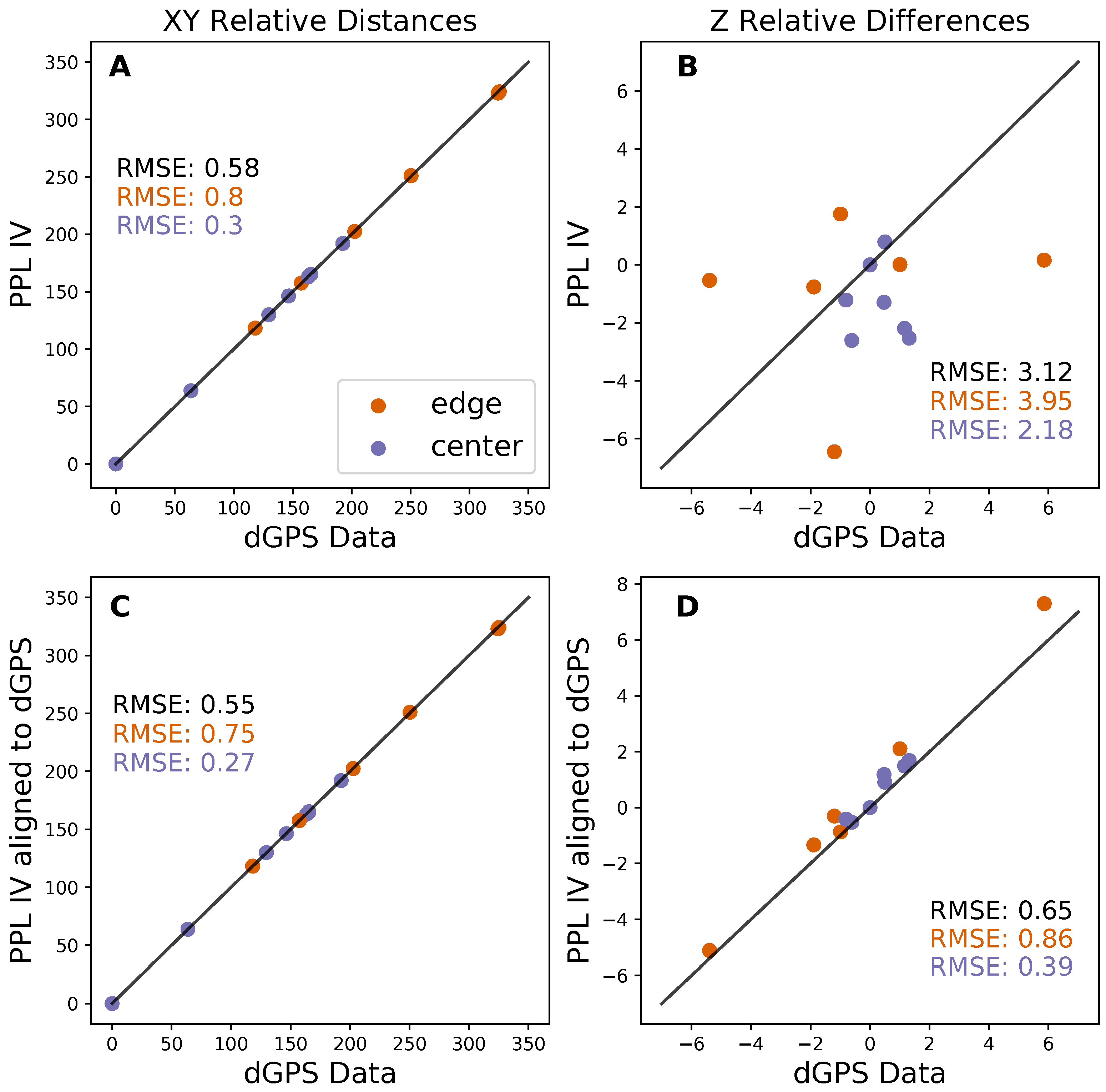
This explains why even after both corrections we encountered an RMSE of
for the 3D alignment (see
Table 4). This RMSE result is lower than accuracies derived in other UAV-based studies on land surface changes, where the error of the photogrammetric product usually ranges in the scale of a few centimeters [
14,
43]. These studies, however, rely on images acquired with RTK technology, the use of GCP, or complimentary airborne or terrestrial laser scanning data, which mostly are not available to local environmental observers or citizen scientists conducting ad-hoc surveys with low-cost consumer-grade UAVs. Our workflow, therefore, opens a pathway for using such lower-accuracy UAV survey techniques in science and engineering applications focusing on terrain change detection.
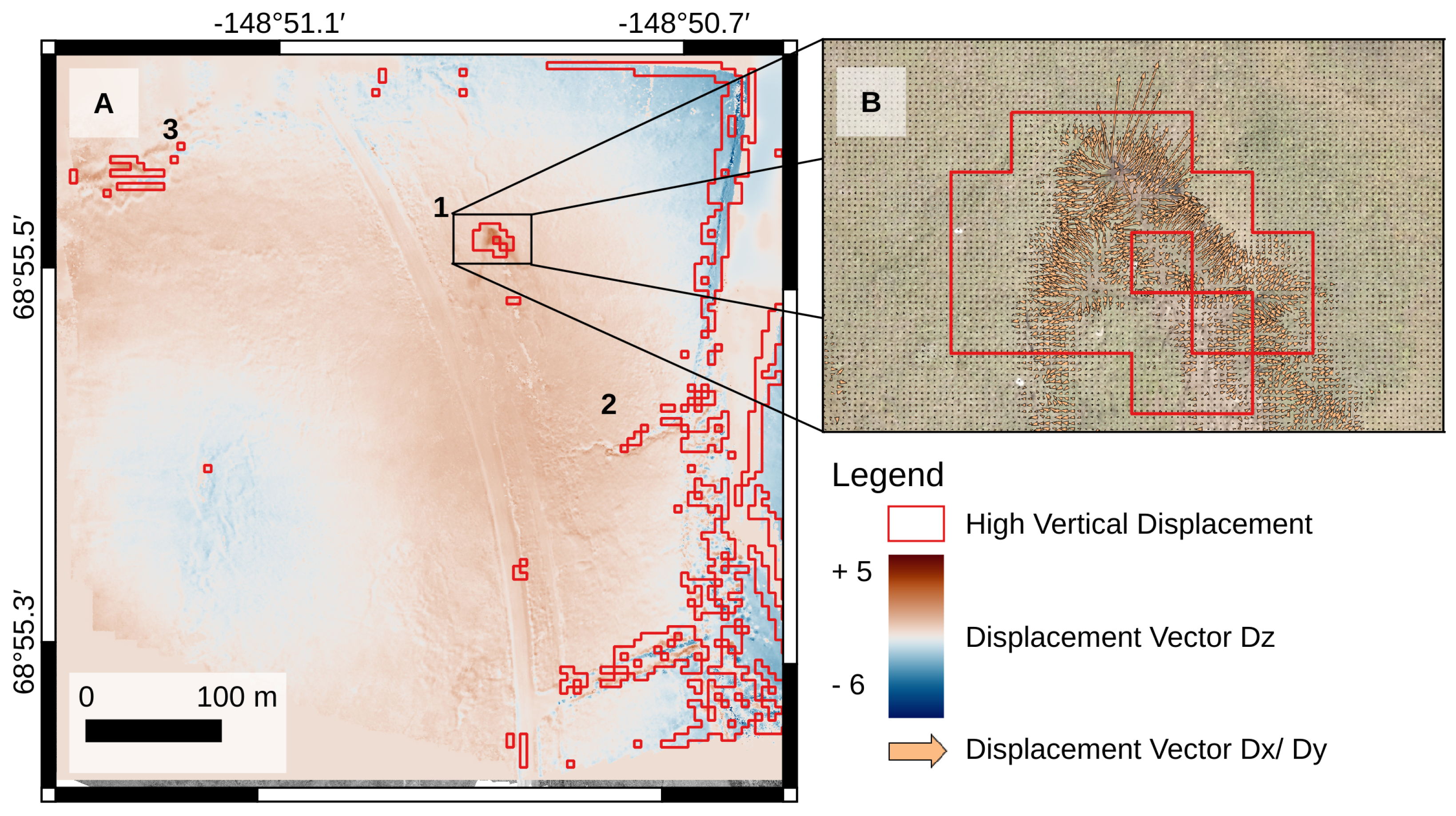
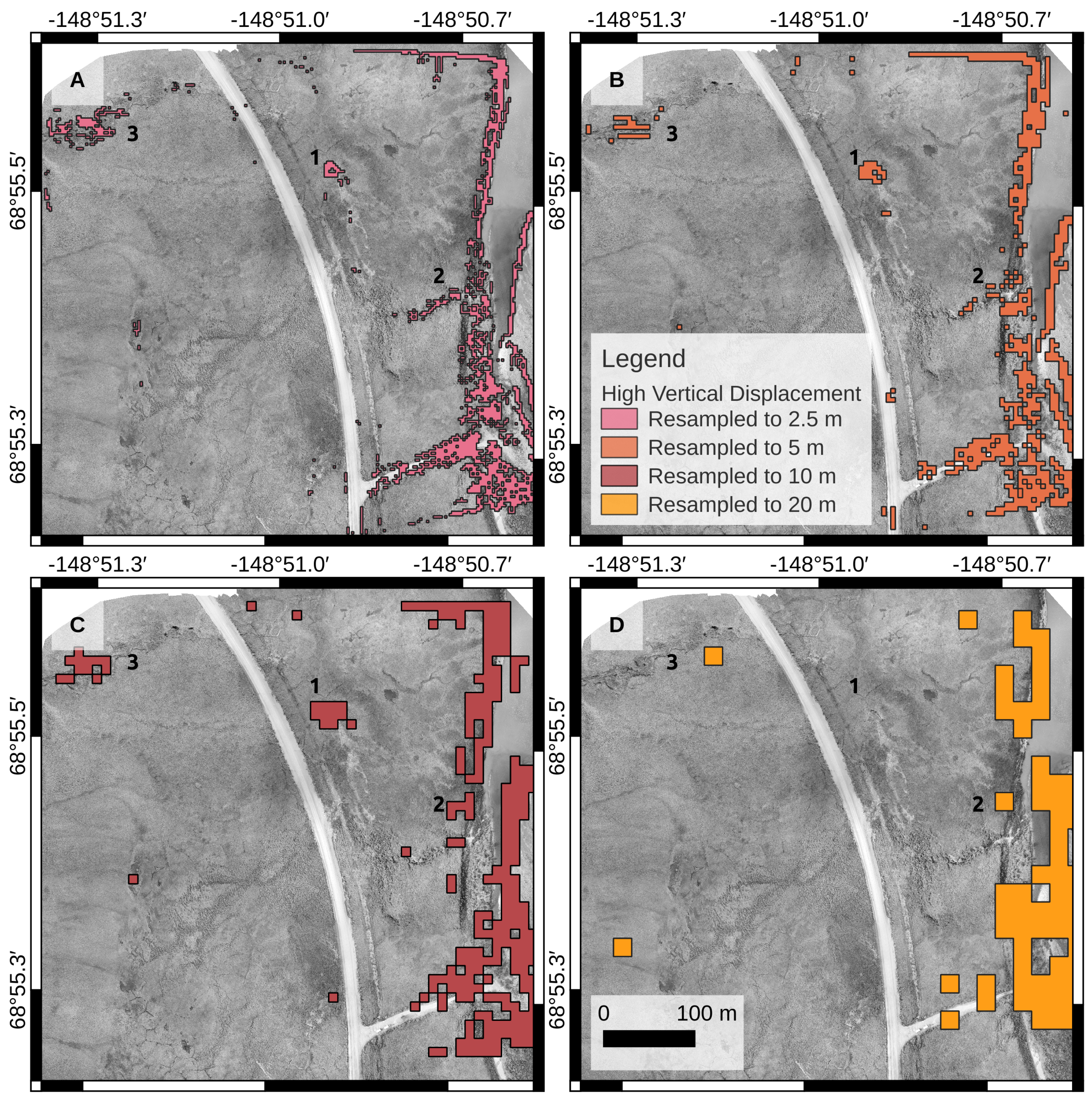
In its current state, the proposed workflow also successfully detected and quantified an erosion feature in close proximity to the Dalton Highway. The raster of the vertical displacement and the subsequent clustering with kMeans depicted spatially coherent land surface changes. The erosion feature and the progression of a gully draining into the Sagavanirktok River (see
Figure 7A,1,2) were detected. We also gained insight into water level changes in the river and individual pooling of water throughout the study area. The supposedly eroding gully in the northwest corner of the study area, however, was an artifact of the consistent offset at the image edges. A shortcoming that, again, can be minimized by the use of different flight patterns. The detected land surface displacement of
m is slightly higher as reported in other studies conducted in Alaska, where annual subsidence values usually stay below 0.10 m [
44,
45,
46]. With a root mean square error still at
and a displacement value of
, we can conclude that in its current state, the workflow is not suitable for detecting seasonal or slow and gradual land surface changes. Assuming the displacement rate persists, it will be able to retrieve an erosion signal exceeding the registration uncertainty only after three years. However, it provides a valuable detection and quantification of rapid and abrupt land surface displacements as well as water level changes.
Assessing the direction and magnitude of the erosion feature, we observed an expansion in an NNE direction. This trajectory was consistent with recognizable patterned ground structures in the area, and the observations indicate that the degradation followed the ice wedge polygonal network. As we only investigated one time step, the derived direction and magnitude represent only a very narrow snapshot summarizing one year of change, while the development of the erosion feature may deviate considerably in the future. Assuming the erosion process continues along the polygonal rims of the ice wedge network, it is likely that there will be a change in direction: the rims in close proximity to the feature diverge to the north and southwest (towards the highway). During the 2018 image acquisition, we further observed a great amount of water pooling at the erosion feature which can accelerate the permafrost degradation [
7,
47,
48]. The future development is based on the simplified assumption that the observed displacement continues linearly. An accurate projection would, however, need observations over longer time periods and complementary data on precipitation, hydrology, morphology, and ground ice distribution in the study area, as they have a substantial impact on the rate and growth direction of permafrost degradation processes.
Our workflow has the clear advantage that it does not rely on a cost and time-intensive setup with dGPS measurements. Designing the workflow with free and open-source software allows anyone to perform monitoring of land surface changes at no additional costs and on any available operating system. Another benefit is the use of off-the-shelf UAVs. They are easy for anyone to operate and therefore provide an affordable opportunity for local citizens and other stakeholders interested in monitoring and documenting changes in the tundra environment related to global warming or other disturbances. Off-the-shelf UAVs could encourage more research and data collection conducted by local environmental observers using a simple UAV setup. Designing the different user scenarios, we found that the unsupervised alignment achieved a comparable alignment accuracy with an RMSE of
m. This underlines the potential of the workflow to be used by, e.g., citizen scientists [
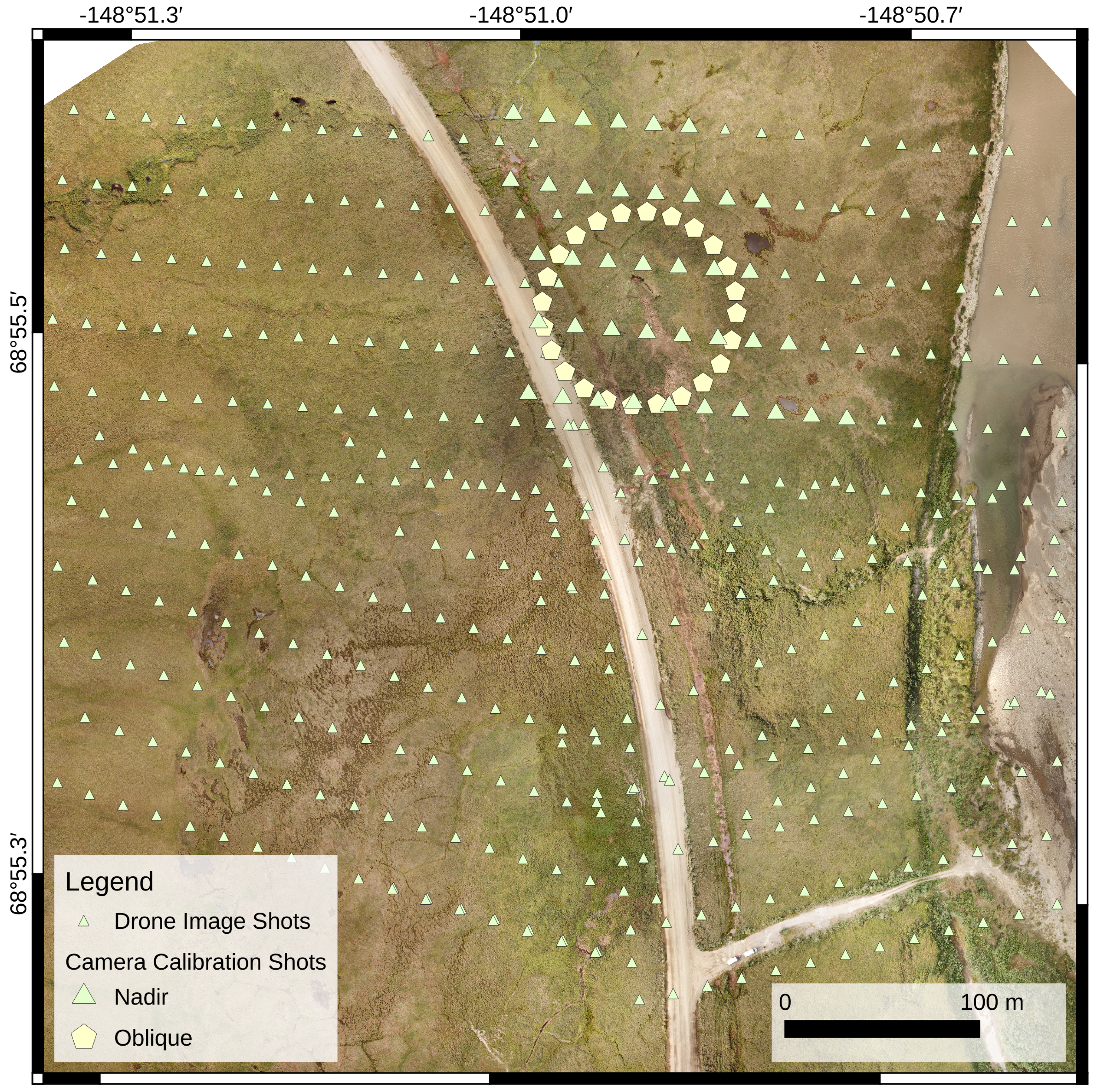
49]. Still, an improvement in the accuracy of the point cloud registration is needed to retrieve seasonal and slowly progressing land surface displacements. To enhance the self-calibration of the camera lens, we therefore propose to acquire complementary oblique images with a perpendicular flight path. This will prevent doming effects [
26] or the overestimation of depressed landforms. Conducting these additional surveys will increase the time needed during field campaigns but delivers a higher alignment accuracy. For improving point cloud comparisons, we recommend implementing the correspondence-driven plane-based M3C2 approach by Zahs et al. [
50]. Their method provides a seven-fold reduction in the uncertainty when computing sub-meter changes of land surfaces that have a high roughness.
5. Conclusions
Our study showcases the successful use of off-the-shelf, consumer-grade UAVs without real-time kinematic GPS correction and without fixed ground control points to detect and quantify short-term and sub-meter ground surface changes attributed to permafrost thaw. We accomplished a workflow that highly improves the quality of the point cloud comparison via M3C2 by minimizing the point cloud noise and vertical and horizontal offset between the acquisition years. The workflow is entirely based on open-source and free software and a minimal drone setup, that is time and cost-efficient. With this, we successfully derived a land surface displacement at a site along the Dalton Highway with a median value of m between 2018 and 2019 and determined its magnitude and direction. Due to the relatively high RMSE of m during the point cloud alignment, we can recommend the use of the workflow in its current state for abrupt and rapid land surface displacements such as thaw slumping, gully erosion, and ice-wedge degradation. To use it for monitoring slowly progressing and seasonal land surface changes, we propose an enhancement by using alternative flight patterns and a modified M3C2 cloud comparison approach. We conclude that there always will remain a trade-off between fast, consumer-grade, and affordable UAV setups on the one hand and science/survey-grade highly accurate but cost- and labor-intensive measurements with RTK-corrected UAV, complimentary laser scanning, or the use of GCP on the other hand. Despite the current limitations, our workflow shows potential for change detection applications using drone imagery, which was acquired without oblique images at perpendicular flight paths and complimentary RTK measurements. The detection and quantification of land surface changes with similar rates will be most accurate if the acquisitions are on a multi-year basis and once it exceeds the registration uncertainty of three years.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








