1. Introduction
With the development of the Global Navigation Satellite System (GNSS), users can adopt Precise Point Positioning (PPP) or Real Time Kinematic (RTK) technology to achieve centimeter or even millimeter-level positioning accuracy. Up to the present, it has been widely used in the fields of deformation monitoring, atmospheric monitoring, unmanned driving, and geodynamics [
1,
2,
3]; reliable satellite orbit and clock products are an important prerequisite for these applications. GNSS high-precision users often use the precise products released by the IGS (International GNSS Service). Currently, the work of the IGS is to combine the satellite orbit and clock products provided by the different analysis centers (ACs) and release more stable and reliable combined products to users. The orbit determination software packages and strategies adopted by each AC are different. For example, both Center for Orbit Determination in Europe (CODE) and Technische Universitaet Muenchen (TUM) use Bernese software, while the other analysis centers use different orbit determination software packages, EPOS by Deutsches GeoForschungsZentrum (GFZ), NAPEOS by European Space Agency (ESA), PANDA by Wuhan University (WHU), POD GINS by Centre National d’Etudes Spatiales (CNES), GAMIT by the Massachusetts Institute of Technology (MIT) and MADOCA by the Japan Aerospace Exploration Agency (JAXA) [
4]. Despite that different orbit determination software packages are used, the accuracy of the GPS satellite orbits for each analysis center is better than 3 cm, and the accuracy of the combined orbits released by IGS is better than 2.5 cm [
5,
6,
7]. Many scholars have carried out orbit combination studies using GPS orbits. And the orbit combination method mainly included weighted average combination and orbit dynamic combination. The weighted average combination method converts the AC orbits into a unified reference frame through the Helmert transformation, and the new orbits are combined with the weighted average after removing the systematic errors.
The orbit dynamic method fits the initial orbit parameters according to the orbits of the different ACs. The combined orbits can be obtained by integrating the initial orbit parameters with the weighted average. To eliminate the inconsistency of the different coordinate frames, Beutler et al. [
8] used the Earth Rotation Parameters (ERP) to correct the differences between the different coordinate frames. Springer T A [
9] and Wei et al. [
10] studied the unified coordinate frame by the rotation parameters of station coordinates in the SINEX file. The unified parameter model of the orbit coordinate frame can be corrected using the inconsistency of the different AC’s final products [
11]. Yan [
12] studied the unification of the reference frames of different ACs using the Helmert rotation parameters. The satellite orbits of the different analysis centers are not uniformly accurate, so it is particularly important to assign reasonable weights to the analysis centers and their satellites in the process of weighted averaging to obtain a combined orbit. Kouba et al. [
13] use the absolute deviation between the analysis center orbits and mean orbits to determine the analysis center weights. Weber et al. [
14] introduced the GLONASS orbit combination strategy for IGS, which use the root mean square deviation between the analysis center and mean orbits to determine the weights. Xu [
15] proposes a weighting method based on the User Range Error (URE), which provides a reference for solving the weighting problem for the combination of multiple types of satellite orbits. Based on the above studies, this paper analyses the influence of different weighting methods on the combined results of the orbits.
The BDS-3 began to provide global services on 27 December 2018, and the completion of BDS was announced in July 2020 [
16,
17]. At present, BDS-2 consists of fifteen satellites, including three medium earth orbit (MEO) satellites, seven inclined geosynchronous orbiting (IGSO) satellites, and five geostationary earth orbit (GEO) satellites, while BDS-3 has 30 satellites, including 3 GEO satellites, 3 IGSO satellites, and 24 MEO satellites. These BDS-2 satellites transmit signals on three frequencies, i.e., B1I (1561.098 MHz), B2I (1207.14MHz), and B3I (1268.52MHz) [
18]. For BDS-3, the satellites are transmitting the original BII and B3I signals, and the new B1C (1575.42 MHz), B2a (1176.45 MHz), B2b (1207.14 MHz), and B2ab (1191.795 MHz) signals. BDS-2 and BDS-3 have overlapping signal frequencies, and BDS-2/BDS-3 joint processing is normally utilized on B1I and B3I, which improves the BDS PNT (positioning, navigation, timing) performance [
19]. Currently, the IGS does not provide a combined BDS-3 orbit, and it is unknown whether applying the GPS orbit combination method to BDS-3 is effective. Most of the analysis centers use the same orbit determination strategies for GPS satellites [
20], but it is unknown whether the orbit determination is consistent for other GNSS systems. Besides, the BDS constellation includes various orbit types, and hence the effect of the orbit combination for different orbit types may also vary. Based on these assumptions, the products from several analysis centers are selected for orbit combination, and the accuracy of the combined orbits for BDS-3 and other GNSS systems is evaluated and analyzed.
This study starts with models and strategies for orbit determination and orbit combination. The orbit product from the Chinese Academy of Surveying & Mapping (CGS) is first assessed in this study. Then the effectiveness of the orbit combination method and the influence of the ERP correction are analyzed by GPS orbits. After that, the accuracy of the combined ultra-rapid orbits for BDS-3 and other GNSS systems is evaluated and analyzed. Finally, a summary and conclusion are made.
2. Materials and Methods
2.1. Models and Strategies of Orbit Determination
Theoretically, the greater the number of analysis centers involved in the orbit combination, the more reliable the accuracy of the combined orbit. To improve the reliability of the combined orbit, the orbit of the Chinese Academy of Surveying & Mapping (CGS) is determined.
Besides, the ECOM model is used to orbit determination [
21,
22,
23]. The ECOM model can be expressed as follows:
where
and
are the SRP acceleration and priori acceleration, respectively.
is the argument of the ascending node,
,
,
,
,
,
,
,
,
are estimated in the orbit determination.
2.2. Combined Orbits Process
Different orbit determination strategies of each analysis center can lead to differences in orbit product accuracy. CODE generates long-arc solutions, allowing it, on the one hand, to mitigate the weakness of the estimated ends of the orbital arcs. When generating such a solution based on the normal equation as described in Brockmann [
24], none of the observations needs to be processed twice, which speeds up the processing. On the other hand, the resulting length of the long-arc orbit solution is a multiple of the basic processing length of one day, namely 72 h, when adding a normal daily equation before and another after the day of interest. This arc length is significantly longer than that for other analysis centers (e.g., 30 h arcs for JPL; 48 h arcs for CGS). Therefore, it is important to assign a reasonable weight to different analysis centers and different types of satellites during combined orbits. In this paper, the weight is calculated from the Root Mean Square (RMS) of the three-dimensional errors.
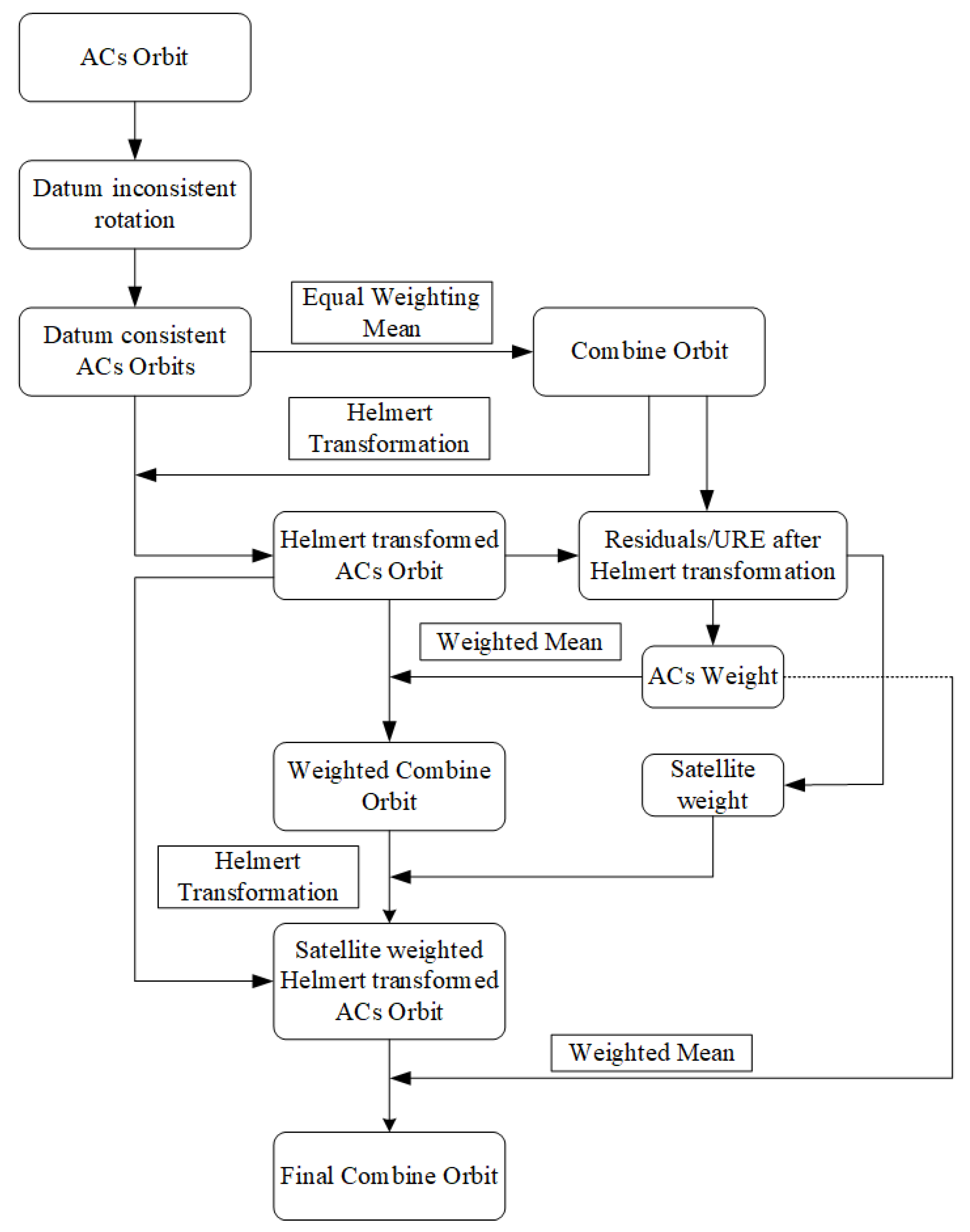
(1) Different analysis centers usually choose different observation data, a different number of stations, and different distribution of stations. It will cause the orbit determined by different analysis centers are not in the consistent coordinate framework. To improve the combined orbits’ accuracy, the orbit consistency of different analysis centers needs to be improved by using the ERP, and the reference ERP is provided by IGS. In this paper, the matrix rotation method is used to analyze the center
orbit
to the reference orbit
. The matrix rotation method can be described as follows:
where
,
, and
are the original orbit coordinates of the analysis center
, respectively.
,
, and
are the orbit coordinates corrected by the ERP parameters.
and
are the difference between the ERP parameters of the analysis center
and the IGS in the X and Y direction, respectively.
(2) After the correction ERP, the orbits of each analysis center are averaged with equal weights, and the averaged orbits are used as reference orbits, which can be expressed as:
where
is the number of the analysis center;
is the reference orbits.
(3) The RMS values of the satellite coordinate three-dimensional errors between each analysis center and reference orbits are calculated as the analysis center’s weight. The weight of the analysis center
can be described as follows:
where
is the number of satellites in the analysis center;
is the number of the epoch of satellite
in the analysis center;
denotes the RMS values of the three-dimensional orbit errors of satellite
in epoch
.
(4) Next, the combined orbits with equal satellite weights and unequal analysis center weights are calculated as:
where
denotes the combined orbits with equal satellite weights.
(5) The corresponding formula is used to calculate the weights of satellites, and the RMS values of the three-dimensional errors between the combined orbits and the analysis center satellites are calculated. The weight of each satellite
can be expressed as:
(6) The Helmert transformation parameters between
and
with unequal satellite weights are calculated using the least squares method [
25,
26]. The analysis center orbits
is transformed to
by Helmert transformation parameters. The final combined orbit
can be expressed as:
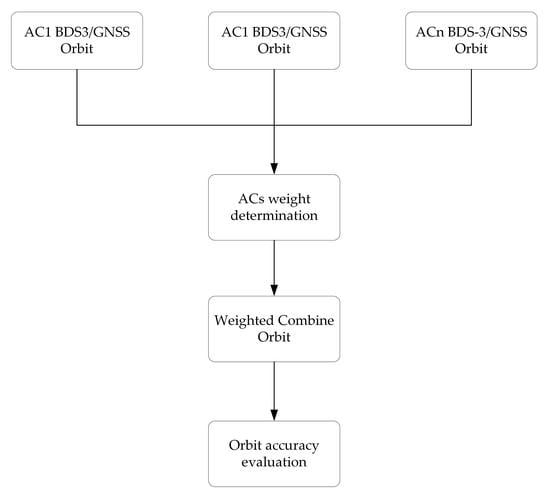
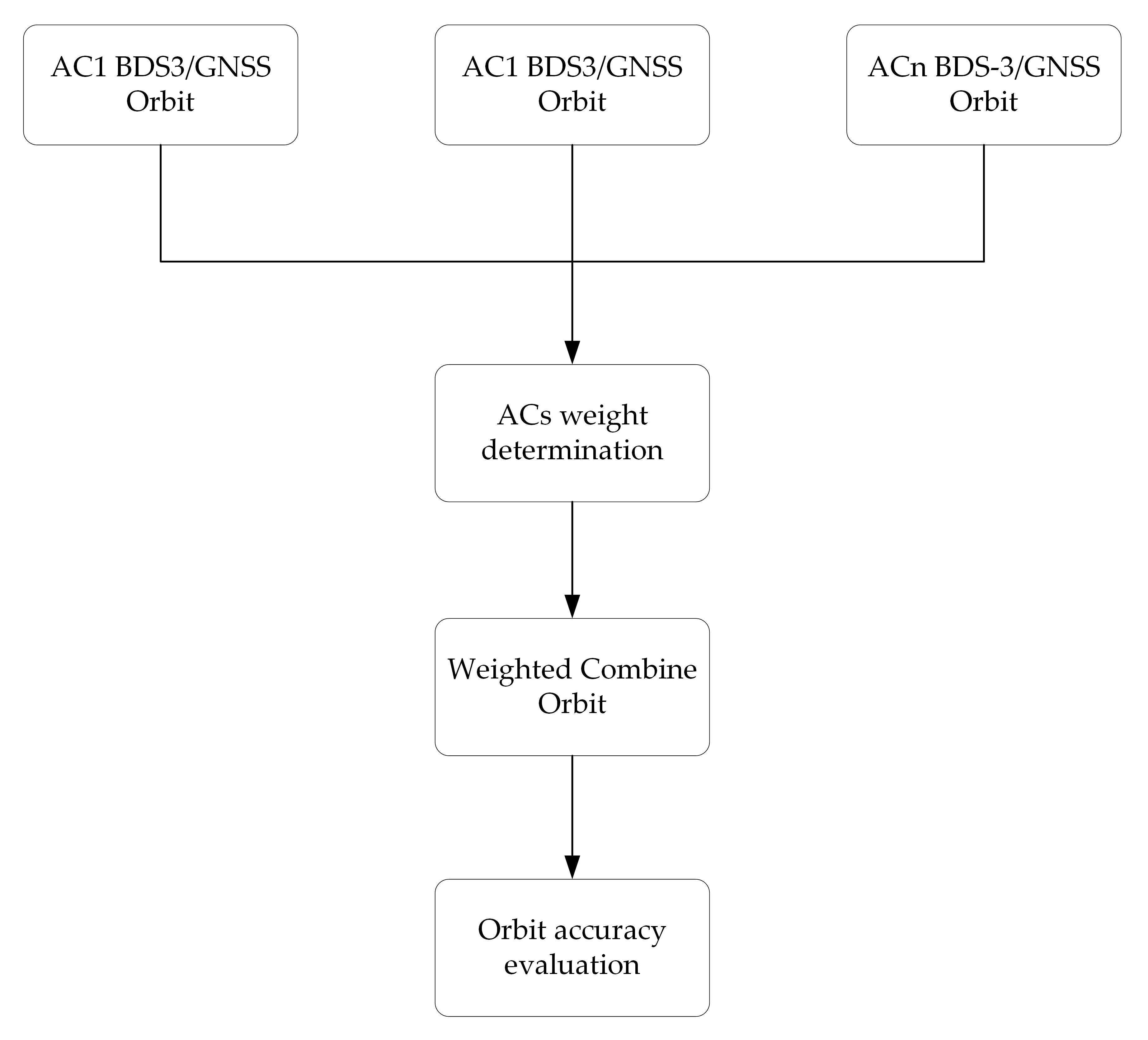
The flow chart of the orbit combination is shown in
Figure 1.
3. Results
3.1. Accuracy Assessment of the CGS Orbits
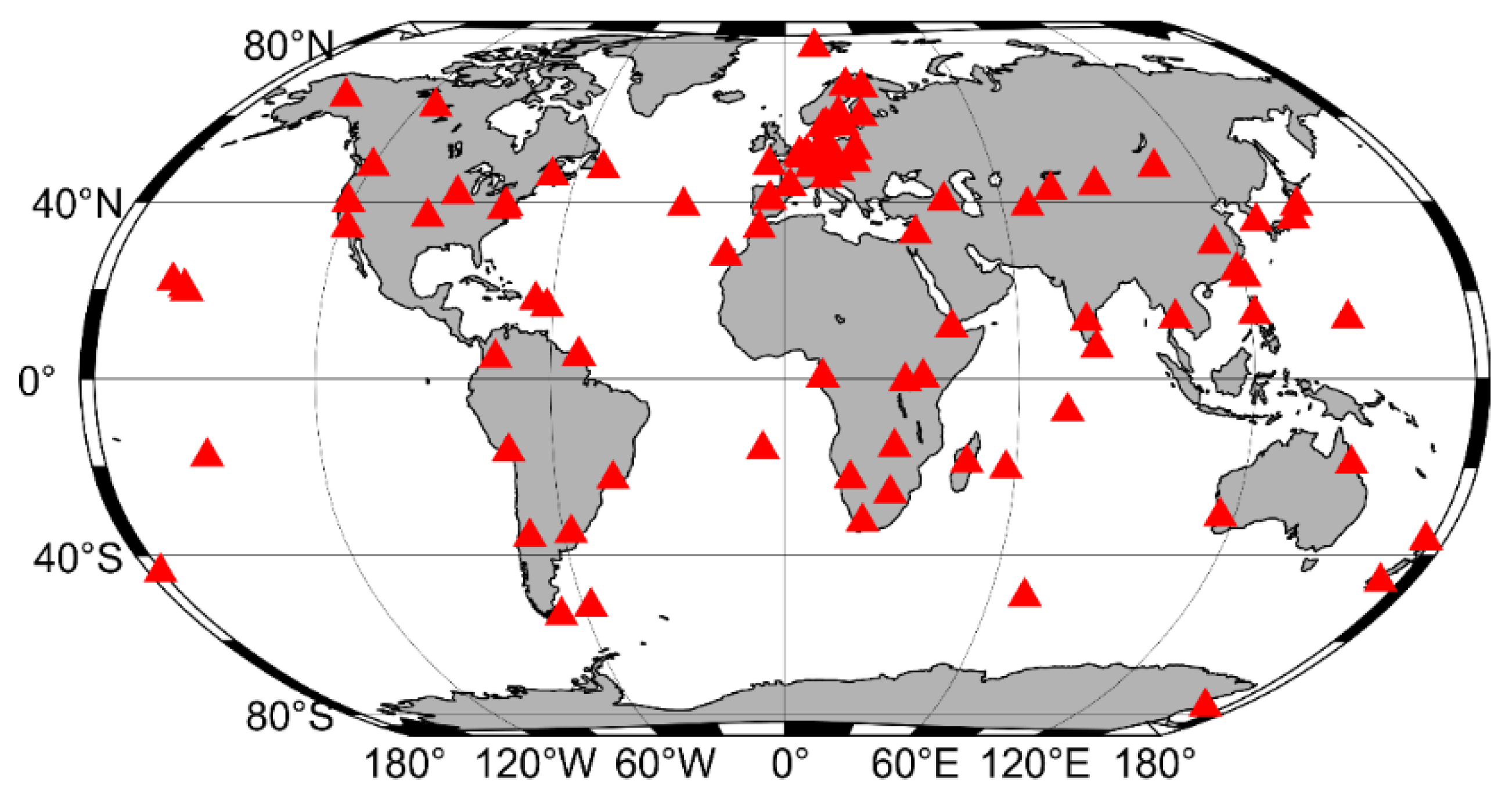
IGS initiated the multi-GNSS experimental (MGEX) in 2011 and built observation networks with multi-GNSS tracking capability. Currently, approximately 250 stations can track multi-GNSS observation signals, including GPS, GLONASS, GALILEO, BDS, and QZSS signals [
27]. To ensure the reliability of orbit determination, 140 globally distributed MGEX stations are selected for CGS orbit determination. The distribution of these stations is shown in
Figure 2, and data from the DOY 213 to 215 in 2022 are collected in 30 s intervals. These stations are equipped with different receiver types, including Javad, Septentrio, Trimble, and Leica.
Based on the principle of dynamic orbit determination, the observation equation is established by using the dual-frequency pseudo-range and carrier phase observations of the 140 MGEX stations, and the dynamic orbit elements are solved to obtain the CGS orbits. To evaluate the CGS orbit products more comprehensively, the final GBM and final CODE orbits are used as a reference to evaluate the CGS orbits.
The determination of GPS and BDS satellite orbits is performed by using the
Figure 2 stations and
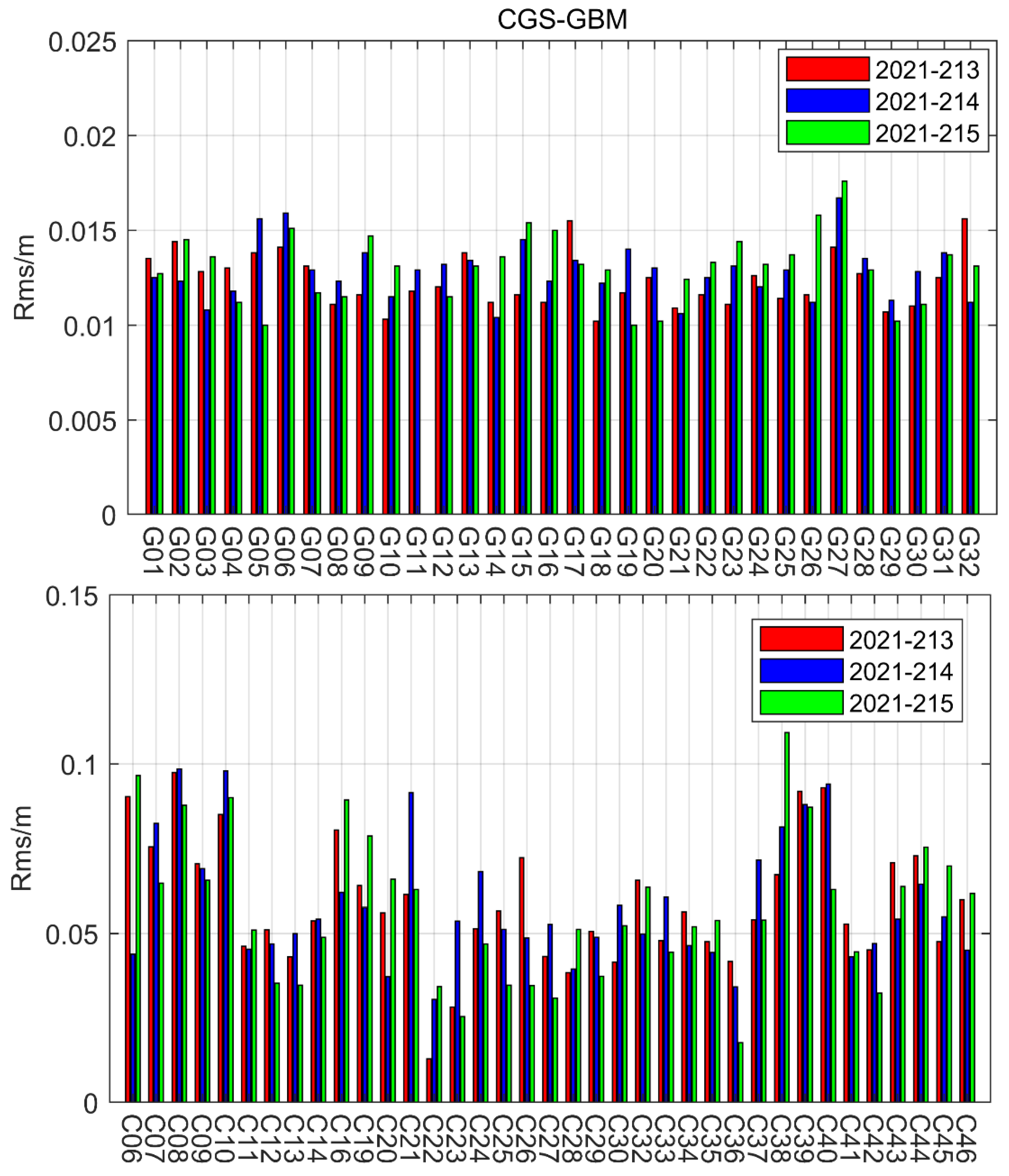
Table 1 strategy, and the orbit performance is assessed by comparing the 3 days orbit. The results are shown in
Figure 3. As can be seen from
Figure 3, the RMS values of the GPS satellite’s three-dimensional errors between the CGS and GBM orbits are less than 2 cm, and most are within 1.5 cm. This can demonstrate the reliability of the CGS orbit products estimated in this paper. The mean RMS for the CGS GPS satellites is 1.31 cm in the three-dimensional. For BDS MEO satellites, the RMS values of three-dimensional errors are basically around 5 cm. For BDS IGSO satellites, the RMS values of three-dimensional errors are significantly larger than MEO satellites. The main reason for the larger three-dimensional errors in the BDS satellites is the different orbit determination model and inconsistent PCO values.
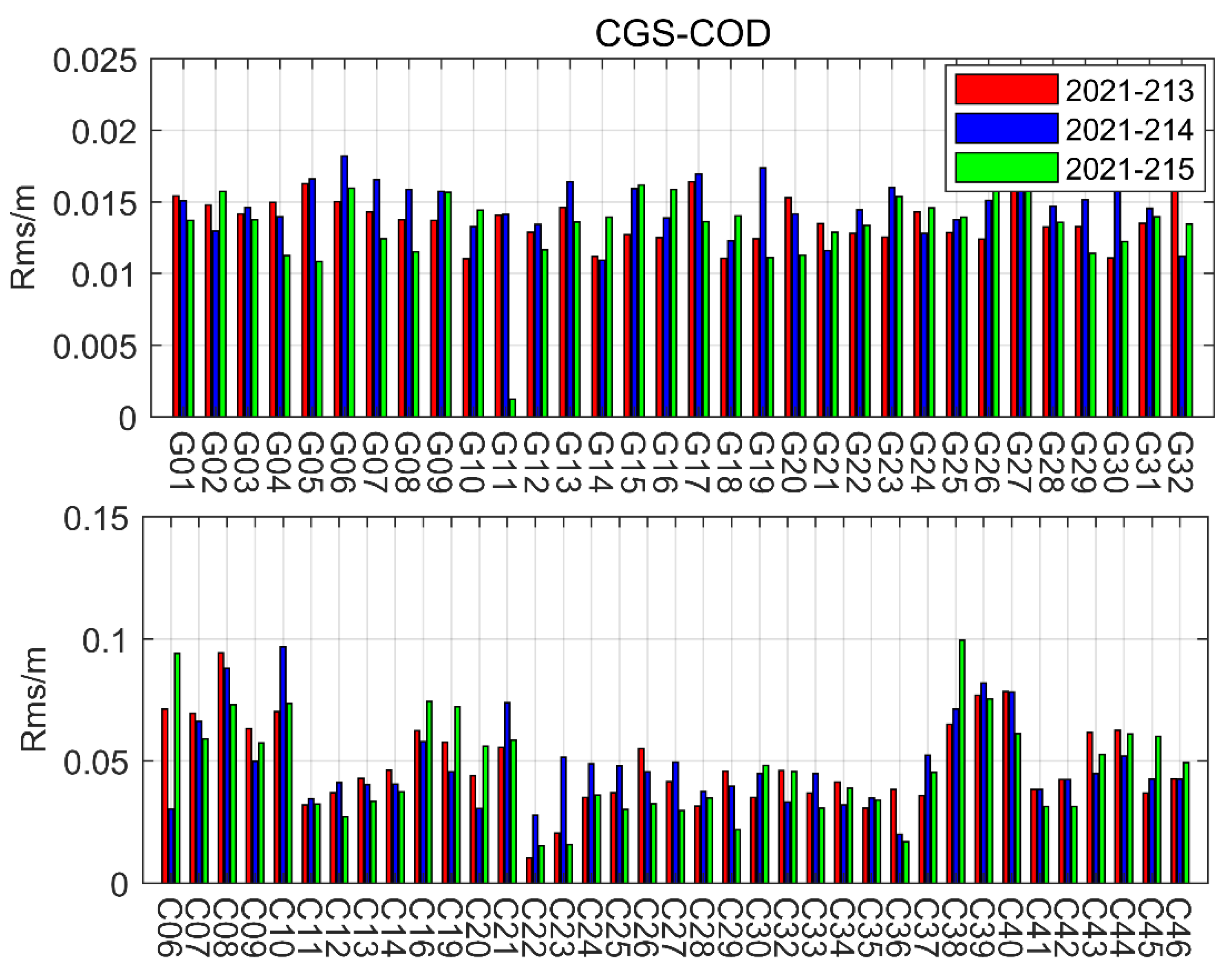
Figure 4 displays the RMS values of GPS and BDS orbit errors between the CGS and GBM. Similar to the results the
Figure 3, the RMS values of GPS satellites are basically within 1.5 cm, and the mean RMS values between the CGS and CODE GPS orbits is 1.43 cm. The results prove that CGS orbits are consistent with CODE orbits. Besides, the RMS values of the BDS MEO satellite’s three-dimensional errors are around 5 cm. The three-dimensional orbit errors of IGSO satellites are also larger than MEO satellites; among all the satellites, C38 presents worse accuracy than the other satellites.
As shown in
Figure 3 and
Figure 4, the CGS GPS orbits show the best quality, while the BDS IGSO orbits show the worst quality. As reported by Guo et al. [
4], for different analysis centers, the same ECOM model is used to determine the GPS orbits, but the other GNSS satellites use the inconsistent model. The RMS values of the three-dimensional orbit errors agree with the orbit errors of the different analysis centers counted in the Guo et al. [
1]. This proves the reliability of the CGS orbit products, and the introduction of CGS orbits in the combination is reasonable.
3.2. Analysis of the Effectiveness of the Orbit Combination Method
In this section, the final GPS orbits from different analysis centers (CGS, CODE, GFZ, ESA, and CNES) are used for orbit combinations to evaluate the effectiveness of the orbit combination method. The final GPS-precise product released by IGS is set as a reference. In this research, we use the Signal in Space User Ranging Error in orbit (SISURE(orb)) for orbit comparison, and it can be calculated as follows [
39,
40,
41]:
where
and
are weight factors and the values are 0.98 and 1/49 for GPS; for GLONASS,
and
; for Galileo
and
; for BDS GEO/IGSO,
and
, for MEO,
and
;
,
and
are orbit error in the radial, along-track, and cross-track directions;
is the contribution of orbit to SISURE.
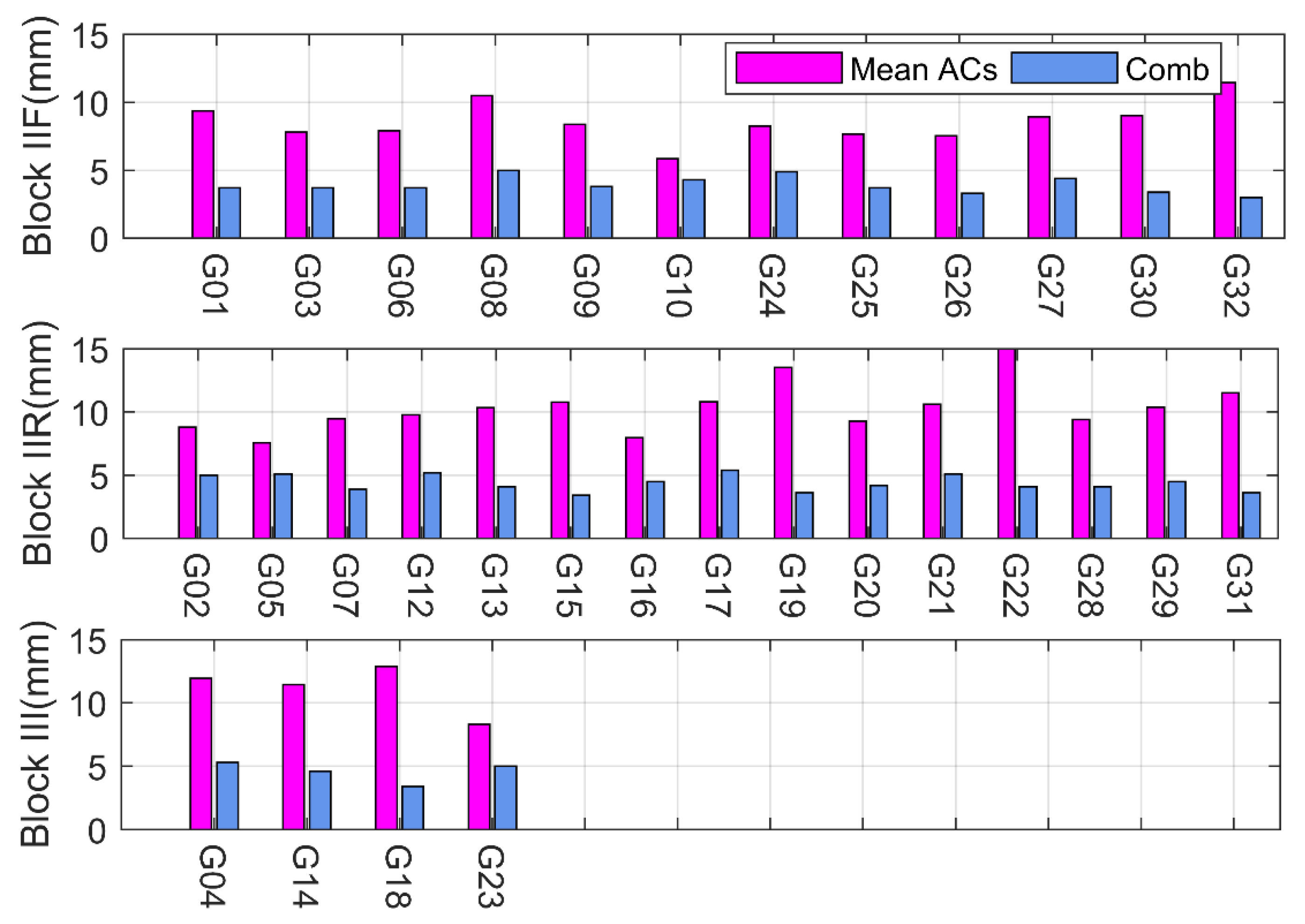
As can be seen from
Figure 5, the pink bar represents the orbit SISURE between the mean analysis centers and the IGS final products; the blue bar represents the orbit SISURE between the combined orbits and the IGS final products, the subplots in the figure represent the orbit SISURE for different orbit types of GPS satellites. It can be seen that the orbit SISURE of the combined orbits is significantly reduced compared to the mean SISURE for all analysis centers. In addition,
Table 2 shows the mean values of SISURE for different orbit types of GPS satellites. For Block IIF satellites, the mean orbit SISURE and the combined orbit SISURE are 8.66 mm and 4.15 mm, respectively. For Block IIR satellites, the mean orbit SISURE and the combined orbit SISURE are 10.67 mm and 5.43 mm, respectively. For Block III satellites, the mean orbit SISURE and the combined orbit SISURE are 11.28 mm and 5.63 mm, respectively. Based on these statistics, we find that the orbit combination improved orbit accuracy for different types of GPS satellites. This demonstrates the effectiveness of the orbit combination method in this research.
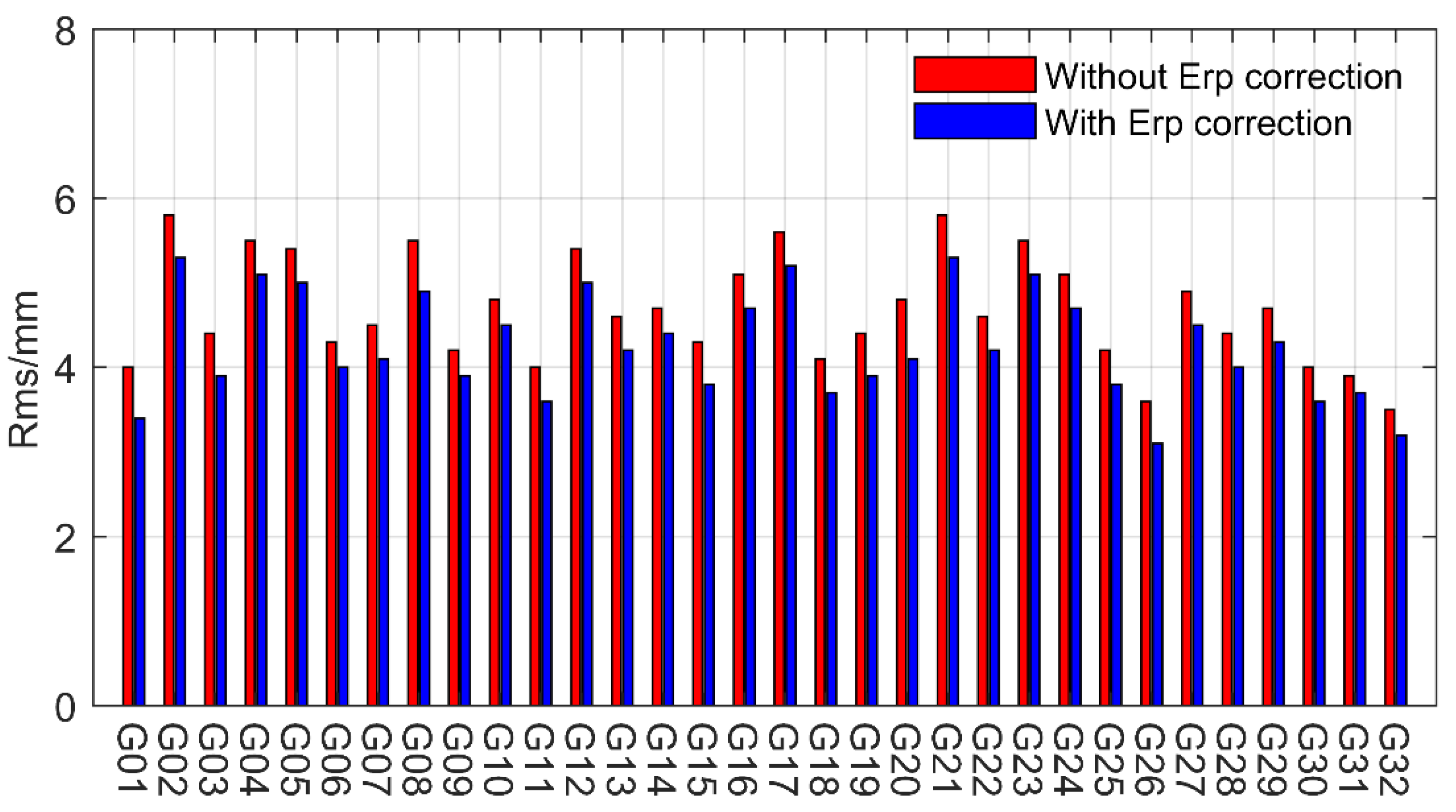
In this section, the influence of the ERP correction on the accuracy of the combined orbits is analyzed and shown in
Figure 6. To evaluate the quality of combined orbits, the final precise ERP product of IGS is set as a reference. As seen in the
Figure 6 result, the red bar represents the RMS values of the orbit errors between the combined orbits without ERP correction and IGS orbits. The blue bar represents the orbit errors between the combined orbits with ERP correction and IGS orbits. It can be seen from
Figure 6 that the accuracy of the combined orbit is improved by the ERP correction. The mean RMS of the without ERP correction orbits and with ERP correction orbits is 4.78 mm and 4.53 mm, respectively.
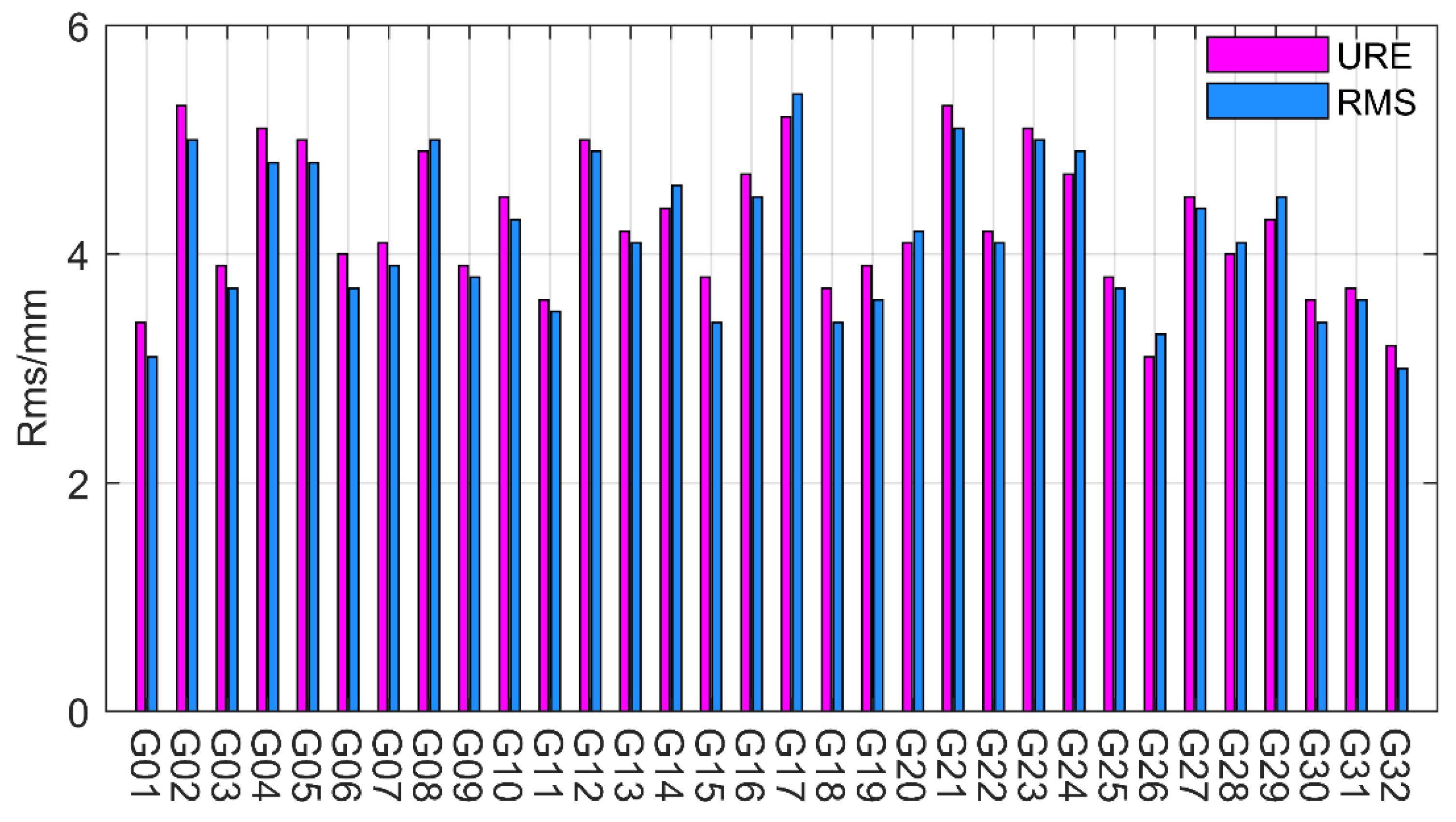
In addition, the influence of the weighting method on the accuracy of combined orbits is analyzed in this section. As can be seen from
Figure 7, the pink bar represents the RMS values of the orbit errors between the IGS orbits and the combined orbits using the URE values to determine the weights; the blue bar represents the orbit errors between the combined orbits using the RMS values to determine the weights and the IGS orbits. The average RMS between the combined orbits obtained by the two weighting methods and the IGS orbits are better than 6 mm, which proves the effectiveness of the two weighting methods. The difference between the orbits combined by the two weighting methods is very small, essentially within 1mm. Therefore, this paper chooses the RMS value to determine the weights for ultra-rapid orbit combinations.
3.3. Analysis Results of MGEX Ultra Rapid Orbit Combination
From the results in
Section 3.2, it can be seen that the orbit combination can achieve a significant improvement in GPS satellite orbit accuracy, and it is necessary to analyze whether orbit combination can equally improve the orbital accuracy for BDS satellites. Currently, only the final GPS orbit is provided by IGS, and the inability to select a suitable reference orbit for accurate assessment of the combined BDS-3 orbit. Considering this, we selected the ultra-rapid orbit products of the analysis centers to analyze the influence of orbit combinations on the orbital accuracy of BDS satellites. For comparison, the combined results of the ultra-rapid orbital products of other GNSS systems are also analyzed in this section.
3.3.1. Accuracy Assessment of Combined Orbits
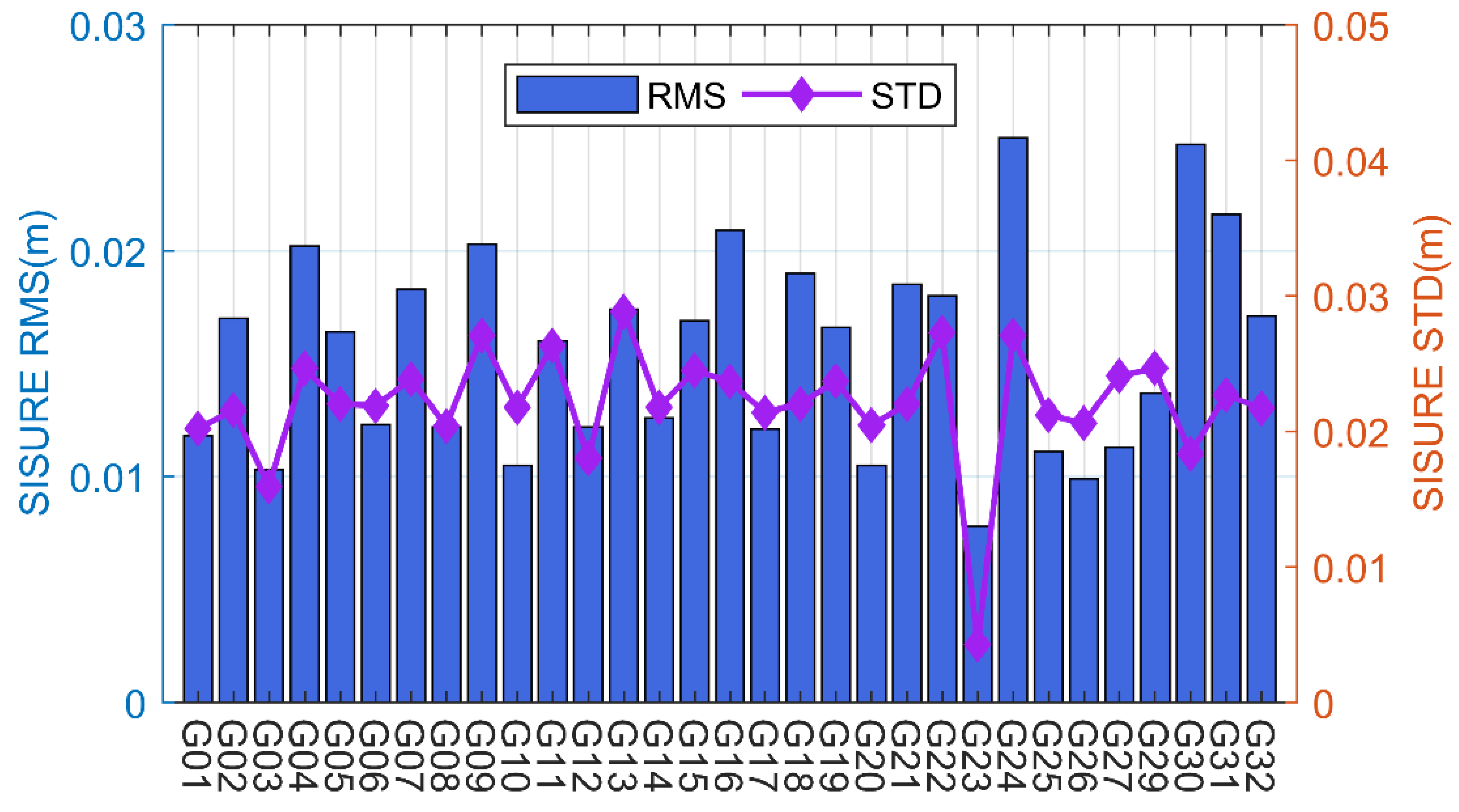
Firstly, the mean value of the Root Mean Square and Standard Variation for all GPS satellites over 30 days is counted, and the statistical results are shown in
Figure 8. As can be seen in
Figure 8, the cylinders and dashes present the RMS and STD, respectively. It can be seen that the RMS values of the SISURE for the combined orbits are all within 3cm, and most of them are less than 2 cm. The values prove the reliability of the combined GPS ultra-rapid orbits. The SISURE STD for all GPS satellites is also within 3cm over 30 days, further validating the combined orbit accuracy.
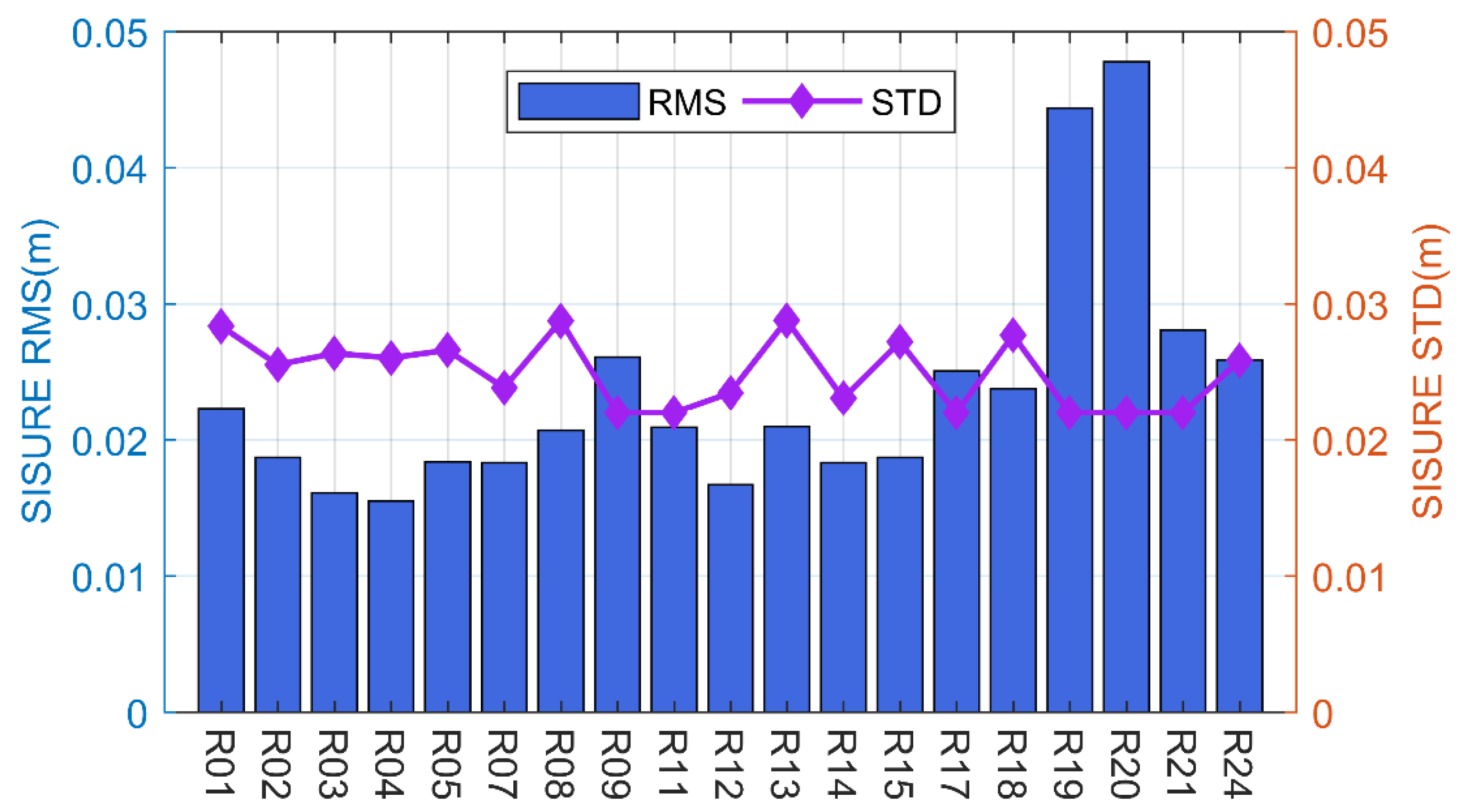
Figure 9 shows the RMS and STD statistics results for the GLONASS satellites. As can be seen from
Figure 9, apart from the R19 and R20, most of the GLONASS satellites are within 3 cm, which proves the reliability of the combined GLONASS ultra-rapid orbits. Besides, the mean STD for all GLONASS satellites is also within 3cm, similar to the GPS results.
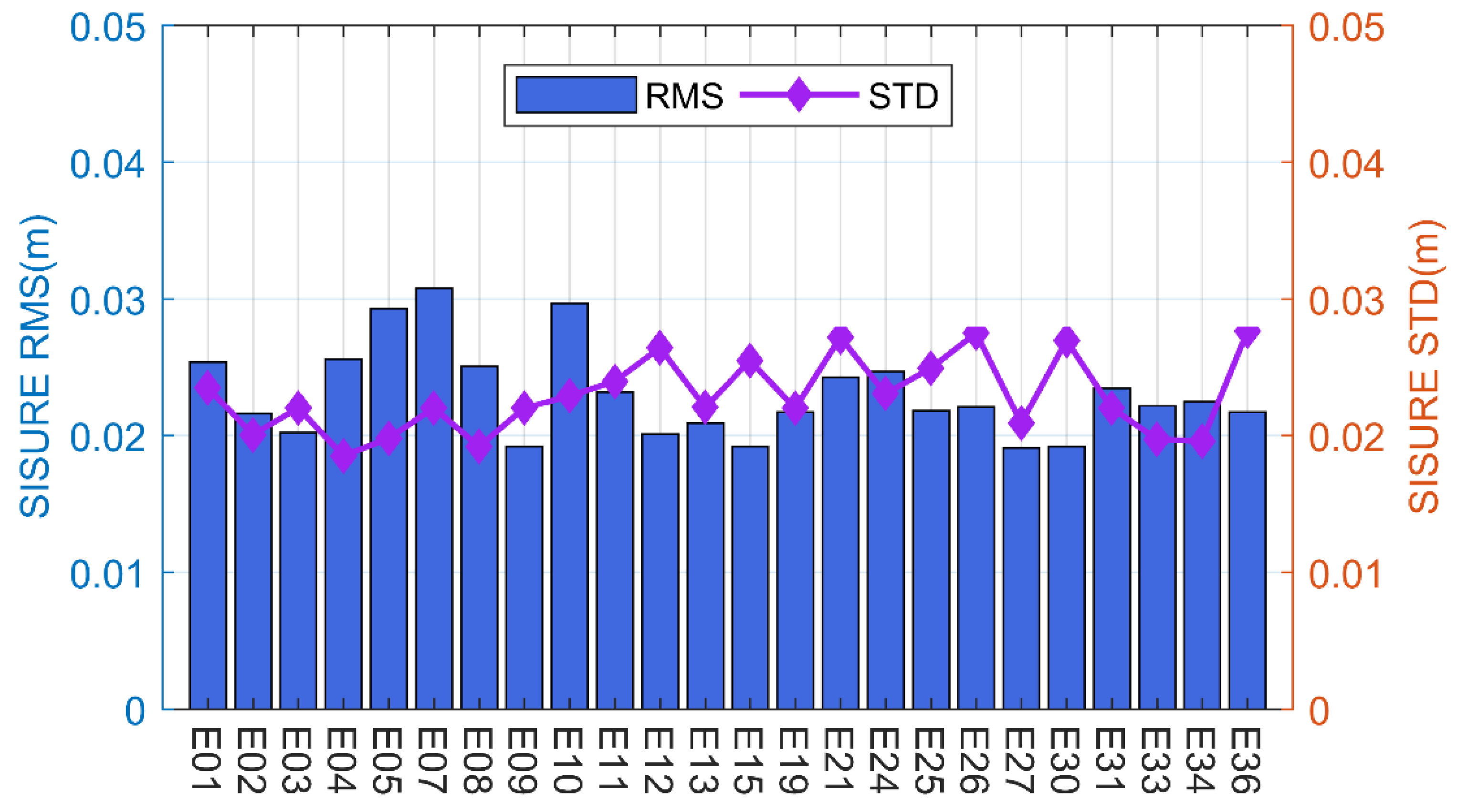
Figure 10 depicts the mean RMS and STD of the SISURE for all GALILEO satellites. The rms and std for all GALILEO satellites shown in the results in
Figure 10 are essentially within 3 cm. This proves that the ultra-rapid orbits of GALILEO satellites combined in this paper are equally reliable. The overall RMS statistics for GALILEO satellites are slightly worse than those for GPS systems, mainly because fewer analysis centers are involved in the GALILEO satellite combination.
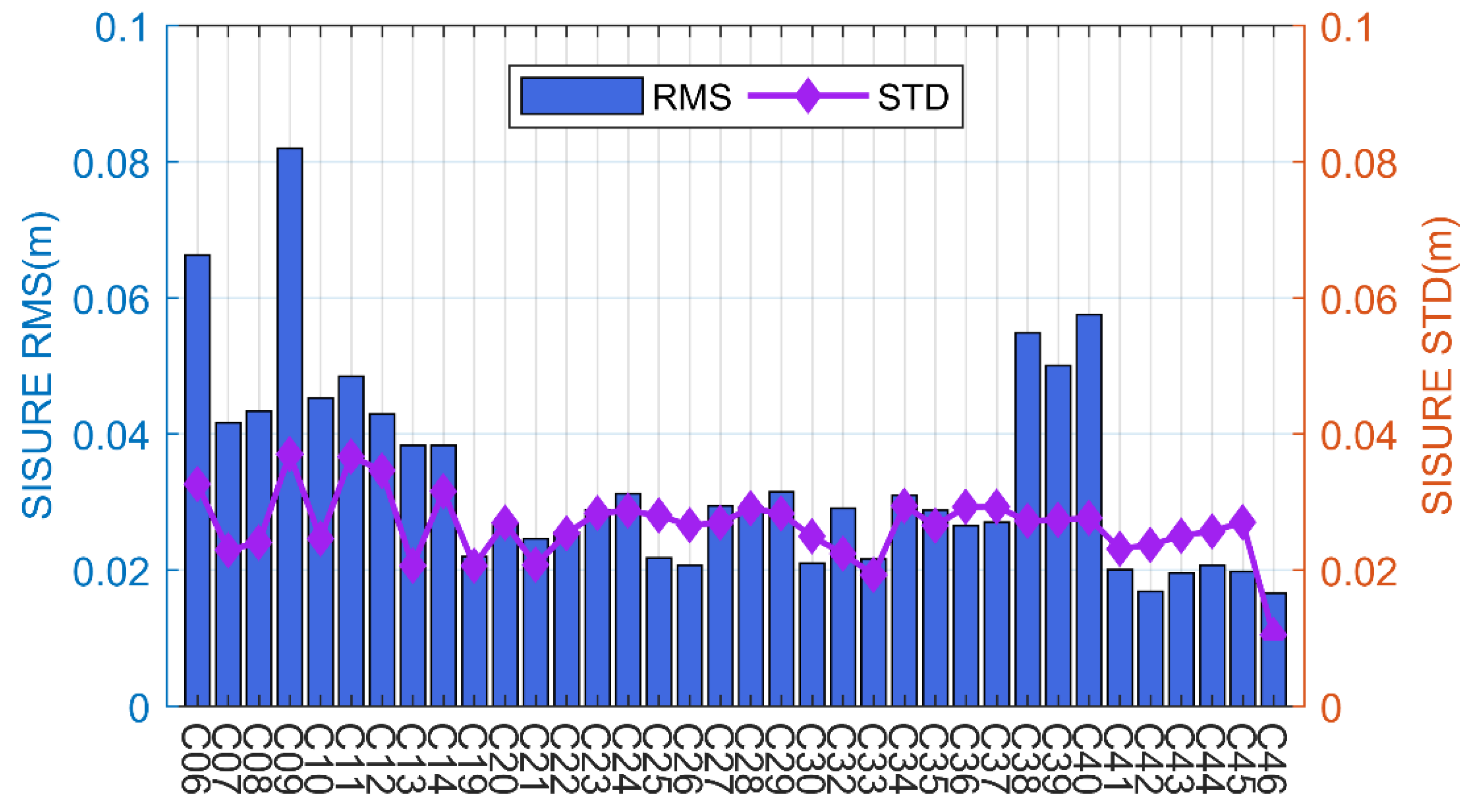
In addition, the mean RMS and STD of BDS satellites are shown in
Figure 11. As seen in
Figure 11, the RMS of the combined orbits of the BDS MEO satellites are all within 4 cm, and the RMS of the BDS-3 MEO satellites are all essentially around 2 cm. The RMS values of the integrated orbits of the BDS IGSO satellites are all above 4 cm, significantly larger than those of the MEO satellites, mainly due to the relatively few stations that can observe the IGSO satellites. Besides, the mean STD for all BDS satellites is also within 4 cm, which proves the reliability of the combined BDS ultra-rapid orbits.
In addition,
Table 3 shows the mean RMS and STD of the combined ultra-rapid orbits for all systems. The mean RMS for GPS, GLONASS, GALILEO, BDS MEO, and BDS IGSO is 1.7 cm, 2.61 cm, 2.52 cm, 2.59 cm, and 4.90 cm, respectively. As can be seen from the results, the RMS statistics for the BDS MEO satellite are already similar to other systems. Besides, the mean STD for GPS, GLONASS, GALILEO, BDS MEO, and BDS IGSO is 2.20 cm, 2.90 cm, 2.50 cm, 2.70 cm, and 2.90 cm, respectively. The reliability of the combined ultra-rapid orbit can be demonstrated by the above results.
3.3.2. The Validity of the Orbit Combination
To further verify the validity of the orbit combination, the 10-day combined ultra-rapid orbit is selected for an accuracy comparison with the GFZ ultra-rapid orbit.
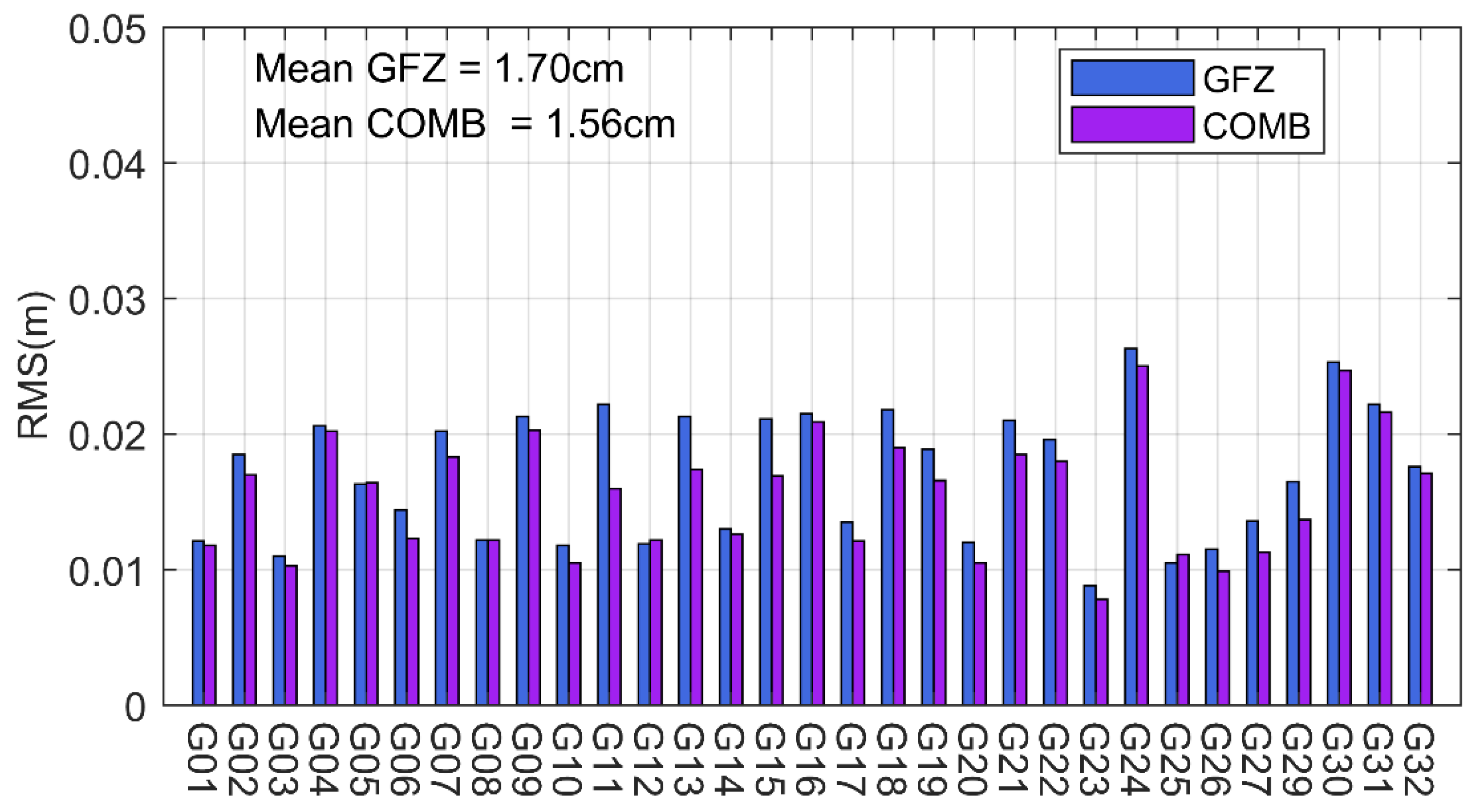
Figure 12 represents the RMS values for the GPS ultra-rapid orbit and the combined GPS ultra-rapid orbit with the final orbit for GFZ, respectively. As can be seen from
Figure 12, compared to the GFZ ultra-rapid orbit, the combined ultra-rapid orbit accuracy significantly improved. Most of the satellites in the GFZ ultra-rapid orbit have error values of 2 cm or more, but the combined ultra-rapid orbit differences are largely within 2 cm. The average RMS of the combined GPS satellites is 1.56 cm, and the average RMS of the GFZ is 1.70 cm; the orbit combination improves the ultra-rapid orbit accuracy of GPS satellites by 8.2%.
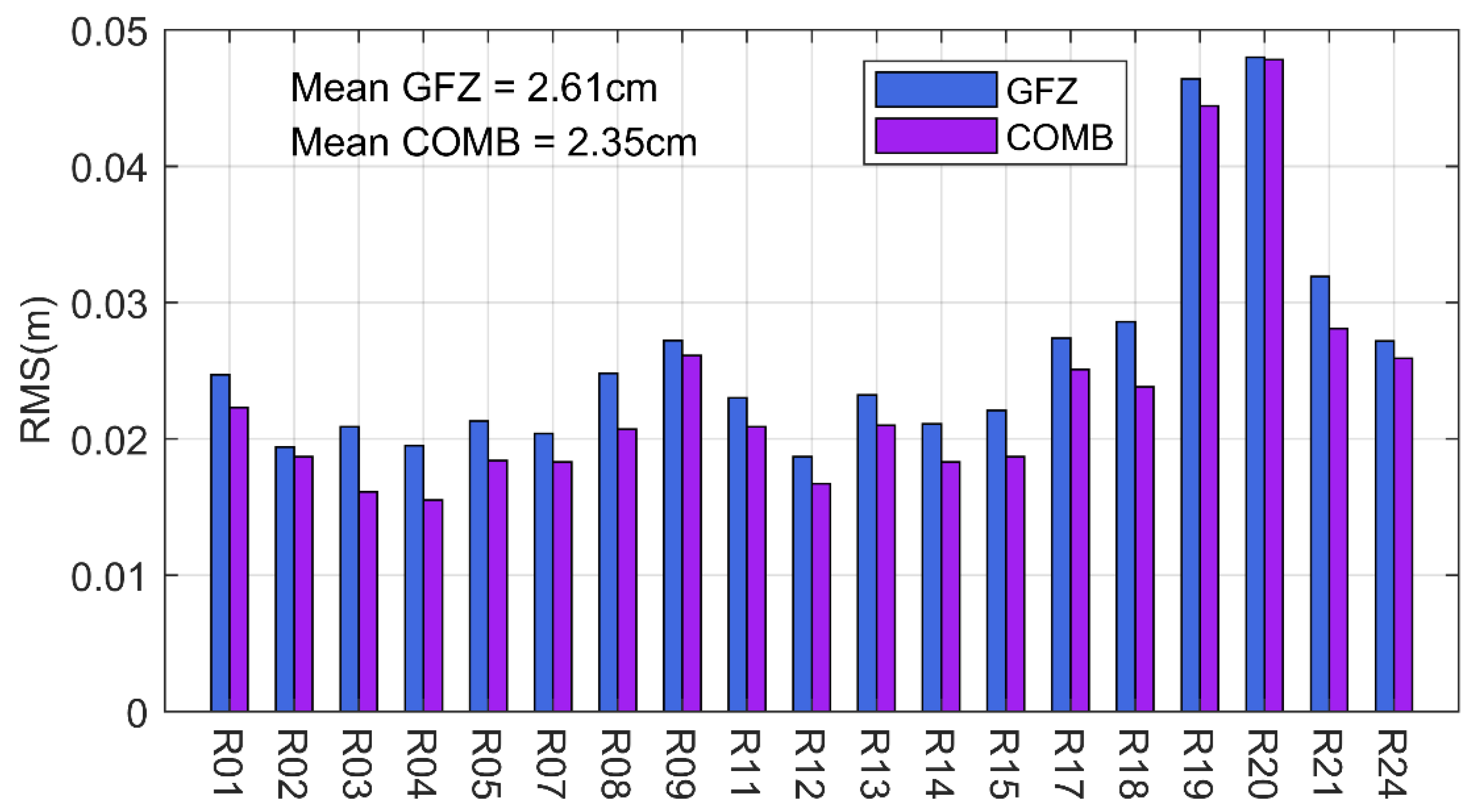
Figure 13 depicts the RMS values for the GLONASS ultra-rapid orbit. The results show that the orbit combination is also valid for GLONASS satellites and that the combined GLONASS ultra-rapid orbit is also improved compared to GFZ. The average RMS for the GLONASS satellite combined ultra-rapid orbit and the GFZ ultra-rapid orbit is 2.61 cm and 2.35 cm, respectively. The orbit combination improves the ultra-rapid orbit of GLONASS satellites by 9.9%.
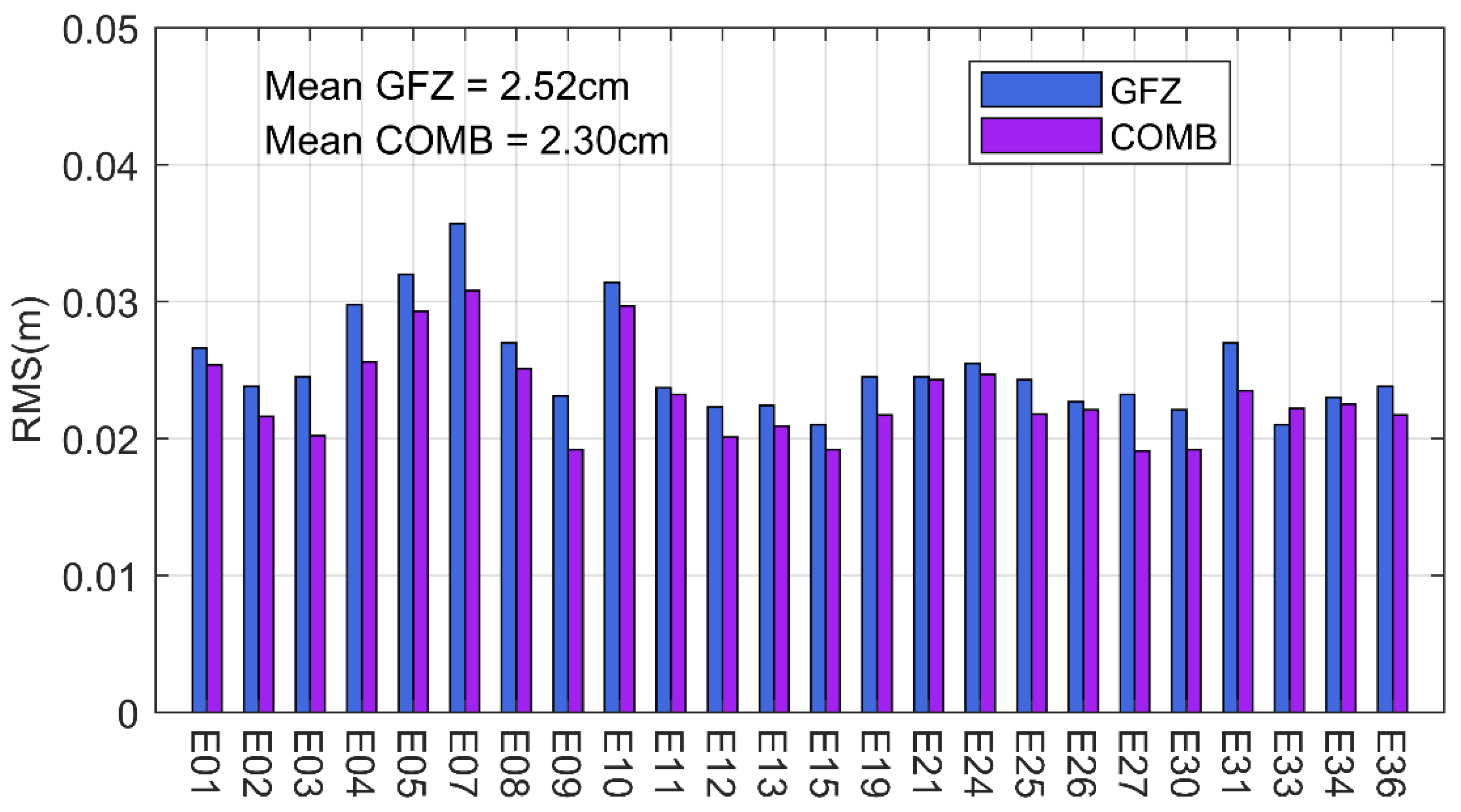
Figure 14 shows the statistical results for the ultra-rapid orbit of the GALILEO satellites. It can be seen that the orbital combination also significantly improves the accuracy of GALILEO satellites. The average RMS for the GALILEO satellite combined orbit and the GFZ orbit is 2.52 cm and 2.30 cm, respectively. The orbit combination improves the ultra-rapid orbit of GLONASS satellites by 9.9%.
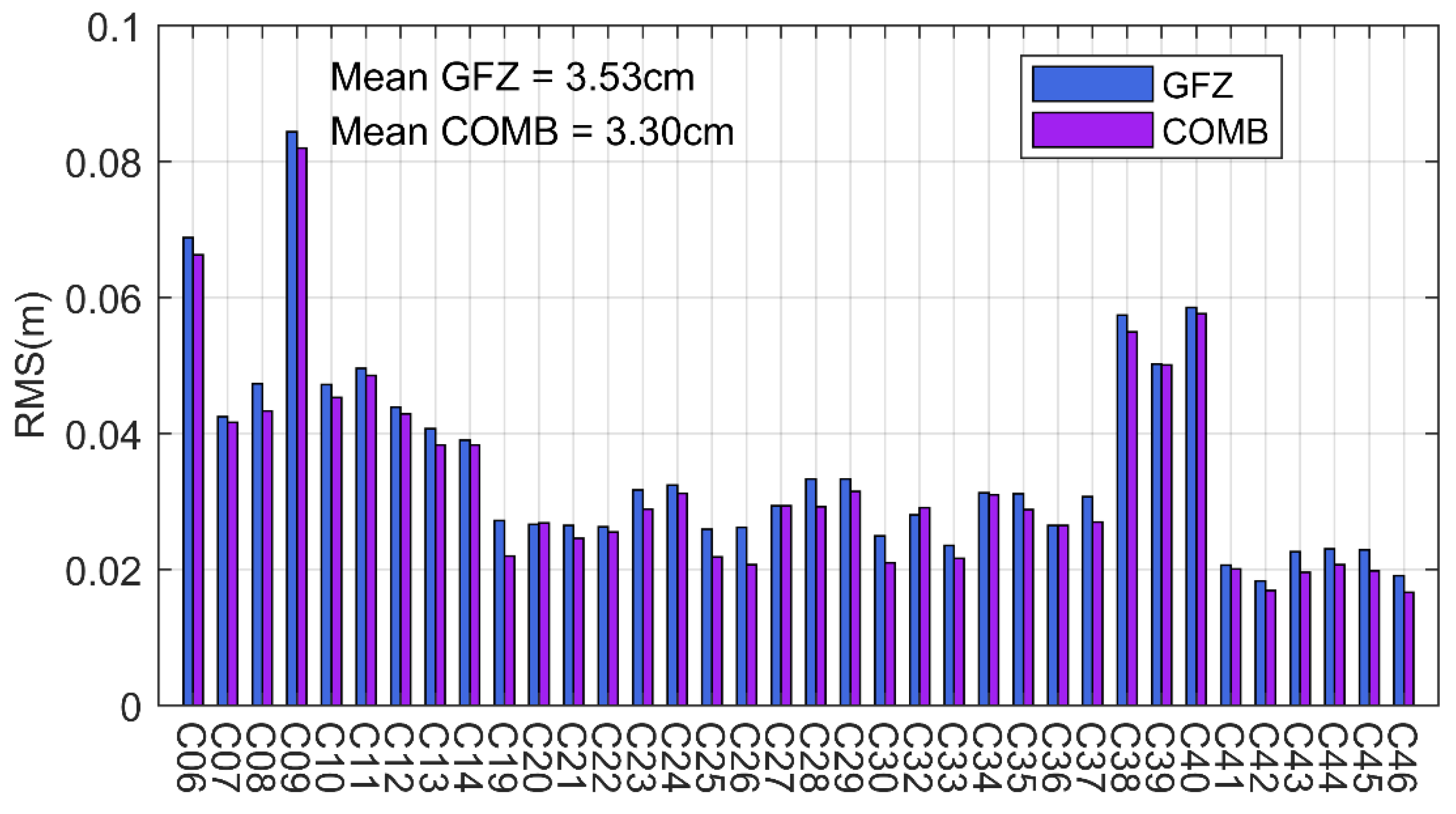
Figure 15 shows the statistical results for the ultra-rapid orbit of the BDS satellites. As can be seen in
Figure 15, the average RMS for the combined orbit is 3.53 cm, and the average RMS for the GFZ ultra-rapid orbit is 3.30 cm. The statistics from the BDS satellites show that the accuracy of the orbit combination for ultra-rapid orbit has improved for both IGSO and MEO satellites, and the average improvement is 5.5%.
It shows that the orbit combination method improves the orbital accuracy and makes the combined orbit more reliable and stable than the individual analysis center orbits.
4. Discussion
According to the results, the orbit combination method used in this research applies to all GNSS systems. The experimental results of the GNSS ultra-rapid orbits show that the orbital combination of orbit products from several analysis centers can improve the accuracy of the GNSS satellites. The highest combined GPS orbit accuracy due to the most consistent GPS orbit determination strategy used by each analysis center. If the orbit determination strategies of GLONASS, GALILEO, BDS, and other systems of each analysis center are unified, it is believed that the accuracy of the combined orbit products of these systems can be improved. Besides, the combined orbit accuracy of the BDS MEO satellites is now close to that of other systems, with the BDS IGSO satellites having the worst combined orbital accuracy.
Because only the final GPS orbit is provided by IGS, there is an inability to select a suitable reference orbit for accurately assessing the combined other GNSS orbits. Considering this, we selected the ultra-rapid orbit products of the analysis centers to analyze the influence of orbit combinations on orbital accuracy. Afterward, the final products from each analysis center could be selected for orbit combination, and products such as SLR can be used to verify the accuracy of the combined orbit products.
5. Conclusions
Currently, the combined orbit products released by IGS only involve GPS. BDS-3 has been operational for more than a year, but there are still no publicly available combined orbit products for BDS-3. In this research, ultra-rapid orbit products from several analysis centers are selected for orbit combination, and the accuracy of the combined orbits for BDS-3 and other GNSS systems is evaluated and analyzed. The results include the following:
(1) The CGS GPS orbits show the best quality; the mean RMS values of three-dimensional errors between the CGS and GBM GPS orbits is 1.31 cm, and the mean RMS values between the CGS and CODE are 1.43 cm. Due to different orbit determination models and inconsistent PCO values, the BDS orbits of the CGS are relatively different from those of the GBM and CODE but are basically within 5cm. This proves the reliability of the CGS orbit products and the introduction of CGS orbits in the combination is reasonable;
(2) The mean SISURE of combined orbits for Block IIF, Block IIR, and Block III is 4.15 mm, 5.43 mm, and 5.63 mm, respectively. The orbit SISURE of the combined orbits is significantly reduced compared to the mean SISURE for all analysis centers. This demonstrates the effectiveness of the orbit combination method in this research;
(3) The mean RMS of the without ERP correction orbits and with ERP correction orbits is 4.78 mm and 4.53 mm, respectively. This demonstrates that orbit consistency correction can improve the accuracy of the combined orbit;
(4) The orbit SISURE between the combined ultra-rapid orbits and the GFZ final orbits is used to evaluate the accuracy of the combined orbits. The mean RMS for GPS, GLONASS, GALILEO, BDS MEO, and BDS IGSO is 1.7 cm, 2.61 cm, 2.52 cm, 2.59 cm, and 4.90 cm, respectively. And the mean STD for GPS, GLONASS, GALILEO, BDS MEO, and BDS IGSO is 2.20 cm, 2.90 cm, 2.50 cm, 2.70 cm, and 2.90 cm, respectively. Based on the above results, the combined orbits accuracy of BDS-3 MEO satellites is already similar to other systems;
(5) The GFZ ultra-rapid orbits are used to assess the effectiveness of the orbit combination. Compared to the GFZ results, the accuracy of the combined ultra-rapid orbits has improved for GPS, GLONASS, GALILEO, and BDS is 8.2 %, 9.9%, 9.9%, and 5.5 %, respectively. It shows that the orbit combination method improves the orbital accuracy compared to the individual analysis center orbits.
Author Contributions
Y.H., H.W. and J.W. conceived the idea and designed the experiments.; Y.H., H.M. and Y.R. performed the experiments and analyzed the data.; Y.H. wrote the main manuscript.; H.M., Y.R., P.L. and Y.W. reviewed the paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by the Key Project of China National Programs for Research and Development (No. 2022YFB3903902; No. 2022YFB3903900), the National Natural Science Foundation of China (No. 42274044; No. 41874042), Opening Project of Shanghai Key Laboratory of Space Navigation and Positioning Techniques (No. 202114), the Funded by State Key Laboratory of Geo-Information Engineering and Key Laboratory of Surveying and Mapping Science and Geo-spatial Information Technology of MNR, CASM (No. 2022-01-09), and the Scientific Research Project of Chinese Academy of Surveying and Mapping (No. AR2101; No. AR2203; No. AR2214).
Data Availability Statement
The GNSS data are provided by the IGS Multi-GNSS Experiment (MGEX) network, which are available at ftp://igs.ign.fr/pub/igs/data/. The GBM data are provided by the GFZ, whicsh are available at ftp://gfz-potsdam.de/; The COD data are provided by CODE, which are available at ftp://ftp.aiub.unibe.ch/. The orbit and ERP products are publicly available for interested users at the MGEX product archive (ftp://cddis.gsfc.nasa.gov/pub/gps/products/mgex).
Acknowledgments
All authors gratefully acknowledge CODE, WUM, CNES, GFZ, ESA, and IGS for providing the data and orbit products.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Paziewski, J.; Sieradzki, R.; Baryla, R. Multi-GNSS high-rate RTK, PPP and novel direct phase observation processing method: Application to precise dynamic displacement detection. Meas. Sci. Technol. 2018, 29, 035002. [Google Scholar] [CrossRef]
- Siejka, Z. Validation of the accuracy and convergence time of real time kinematic results using a single galileo navigation system. Sensors 2018, 18, 2412. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Specht, C.; Specht, M.; Dąbrowski, P. Comparative analysis of active geodetic networks in Poland. Int. Multidiscip. Sci. GeoConference SGEM 2017, 17, 163–176. [Google Scholar]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. Assessment of precise orbit and clock products for Galileo, BeiDou, and QZSS from IGS Multi-GNSS Experiment (MGEX). GPS Solut. 2017, 21, 279–290. [Google Scholar] [CrossRef]
- Robert, W.; Elisabeth, F. In Proceedings of the Combined GLONASS Orbits, IGS International GLONASS Experiment IGEX-98 Workshop Proceedings, Nashville, TN, USA, 13–14 September 1999; pp. 233–246.
- Pascal, W.; James, S. International GPS Service; IGS Annual Report: Pasadena, CA, USA, 1998; pp. 38–39. [Google Scholar]
- Springer, T.; Zumberge, J.; Kouba, J. The IGS Analysis Products and the Consistency of the Combined Solutions; Citeseer: Princeton, NJ, USA, 1998. [Google Scholar]
- Beutler, G.; Kouba, J.; Springer, T. Combining the orbits of the IGS Analysis Centers. J. Geod. 1995, 69, 200–222. [Google Scholar] [CrossRef]
- Springer, T.; Beutler, G. Towards an Official IGS Orbit by Combining the Results of All IGS Processing Centers. In Proceedings of the 1993 IGS Workshop, Bern, Switzerland, 24–26 March 1993. [Google Scholar]
- Wei, N.; Shi, C.; Li, M.; Zou, R. Analysis and Assessments of IGS products Consistencies. Geomat. Inf. Sci. Wuhan Univ. 2009, 34, 1363–1367. [Google Scholar]
- Griffiths, J. Misalignment of the AC Final Orbits. 2012. Available online: Acc.igs.org/orbits/acc_report_final_rotations.pdf (accessed on 16 November 2012.).
- Yan, Y. Characteristics of Precise Clock and Precise Orbit Deviation between IGS and Analysis Centers Deviation between IGS and Analysis Centers; Tongji University: Shanghai, China, 2018. [Google Scholar]
- Kouba, J.; Mireault, Y.; Lahaye, F. IGS Orbit/Clock Combination and Evaluation, Appendix 1 of the Analysis Coordinator Report, International GPS Service; Jet Propulsion Laboratory Publication: Pasadena, CA, USA, 1994; pp. 18–95. [Google Scholar]
- Weber, R.; Springer, T. The international GLONASS experiment: Products, progress and prospects. J. Geod. 2001, 75, 559–568. [Google Scholar] [CrossRef]
- Xu, X. Research on Method of GEO/IGSO/MEO Satellites Orbit Combination; Wuhan University: Wuhan, China, 2017. [Google Scholar]
- Wang, M.; Wang, J.; Dong, D. Performance of BDS-3: Satellite visibility and dilution of precision. GPS Solut. 2019, 23, 1–14. [Google Scholar] [CrossRef]
- Li, R.; Wang, N.; Li, Z. Precise orbit determination of BDS-3 satellites using B1C and B2a dual-frequency measurements. GPS Solut. 2021, 25, 1–14. [Google Scholar] [CrossRef]
- Yang, Y.; Jin, L. Contribution of the Compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.; Liu, H.; Yang, Z.; Shu, B.; Xu, X.; Nie, G. Evaluation of Network RTK Positioning Performance Based on BDS-3 New Signal System. Remote Sens. 2022, 14, 2. [Google Scholar] [CrossRef]
- Springer, T.; Beutler, G.; Rothacher, M. A new solar radiation pressure model for the GPS satellites. GPS Solut. 1999, 3, 50–62. [Google Scholar] [CrossRef]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- He, L.; Ge, M.; Wang, J. Experimental Study on the Precise Orbit Determination of the BDS Navigation Satellite System. Sensors 2013, 13, 2911–2928. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Zhang, S. The impacts of different satellite antenna parameters on BDS precise orbit determination and precise point positioning accuracy. Acta Geod. Cartogr. Sin. 2019, 48, 908–918. [Google Scholar]
- Brockmann, E. Combination of solutions for geodetic and geodynamic applications of the Global Positioning System (GPS). Geod.-Geophys. Arb. Schweiz 1997, 55. [Google Scholar]
- Wang, Q.; Chang, G.; Xu, T.; Zou, Y. Representation of the rotation parameter estimation errors in the Helmert transformation model. Surv. Rev. 2018, 50, 69–81. [Google Scholar] [CrossRef]
- Guo, S.; Shi, C.; Wei, N.; Li, M.; Fan, L.; Wang, C.; Zheng, F. Helmert transformation strategies in analysis of GPS position time-series. Geophys. J. Int. 2020, 223, 973–992. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Schmid, R. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Pavlis, N.; Holmes, S.; Kenyon, S.; Factor, J. The development and evaluation of the earth gravitational model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117(B16), 4406. [Google Scholar] [CrossRef] [Green Version]
- Luzum, B.; Petit, G. The IERS Conventions (2010): Reference systems and new models. Proc. Int. Astron. Union 2012, 10, 227–228. [Google Scholar] [CrossRef] [Green Version]
- Standish, E. JPL Planetary and Lunar Ephemerides DE405/LE405 Interoffice Memorandum IOM 312.F-98-048; Jet Propulsion Laboratory: Pasadena, CA, USA, 1998. [Google Scholar]
- Beutler, G.; Brockmann, E.; Gurtner, W.; Hugentobler, U.; Verdun, A. Extended orbit modeling techniques at the CODE processing center of the international GPS service for geodynamics (IGS): Theory and initial results. Manuscr. Geodaet. 1994, 19, 367–386. [Google Scholar]
- Mao, Y.; Song, X.; Jia, X.; Rengui, Z. Analysis about parameters selection strategy of ECOM solar radiation pressure model for BeiDou satellites. Acta Geod. Cartogr. Sin. 2017, 46, 1812–1821. [Google Scholar]
- Saastamoinen, J. Contributions to the theory of atmospheric refraction. Bull. Géodésique 1973, 107, 13–34. [Google Scholar] [CrossRef]
- Böhm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global mapping function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, 1. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Chen, X.; Sun, J.; Liu, Q. An analysis of GPT2/GPT2W+Saastamoinen models for estimating zenith tropospheric delay over Asian area. Adv. Space Res. 2017, 59, 824–832. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions (2010); Bureau International des Poids et Mesures Sevres: Sèvres, France, 2010. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean. Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Rebischung, P.; Schmid, R. IGS14/igs14. atx: A new framework for the IGS products. In Proceedings of the AGU Fall Meeting 2016, San Francisco, CA, USA, 12–16 December 2016. [Google Scholar]
- Xie, H.; Song, S.; Jiao, G.; Huang, C.; Chen, Q. Preliminary evaluation of SISURE of Beidou satellite navigation system. Acta Astron. Sin. 2019, 60, 26. [Google Scholar]
- Zhou, S.; Cao, Y.; Zhou, J. Positioning accuracy assessment for the 4GEO/5IGSO/2MEO constellation of COMPASS. Sci. China Phys. Mech. Astron. 2012, 55, 2290–2299. [Google Scholar] [CrossRef]
- Wang, Z.; Shao, W.; Li, R.; Song, D.; Li, T. Characteristics of BDS signal-in-space user ranging errors and their effect on advanced receiver autonomous integrity monitoring performance. Sensors 2018, 18, 4475. [Google Scholar] [CrossRef]
Figure 1.
Orbit combination process strategies.
Figure 1.
Orbit combination process strategies.
Figure 2.
Distribution of 140 selected MGEX stations for CGS orbit determination.
Figure 2.
Distribution of 140 selected MGEX stations for CGS orbit determination.
Figure 3.
RMS values of the three-dimensional errors between CGS and GBM.
Figure 3.
RMS values of the three-dimensional errors between CGS and GBM.
Figure 4.
RMS values of the three-dimensional errors between CGS and CODE.
Figure 4.
RMS values of the three-dimensional errors between CGS and CODE.
Figure 5.
RMS values of the SISURE (orb) for mean analysis centers and combined orbits.
Figure 5.
RMS values of the SISURE (orb) for mean analysis centers and combined orbits.
Figure 6.
The RMS values of the orbit errors between the different combined orbits (with and without ERP correction) and IGS final orbits.
Figure 6.
The RMS values of the orbit errors between the different combined orbits (with and without ERP correction) and IGS final orbits.
Figure 7.
The RMS values of the orbit errors between the different combined orbits (different weighting methods) and IGS orbits.
Figure 7.
The RMS values of the orbit errors between the different combined orbits (different weighting methods) and IGS orbits.
Figure 8.
The RMS and STD of combined GPS Ultra-rapid orbits.
Figure 8.
The RMS and STD of combined GPS Ultra-rapid orbits.
Figure 9.
The RMS and STD of combined GLONASS Ultra-rapid orbits.
Figure 9.
The RMS and STD of combined GLONASS Ultra-rapid orbits.
Figure 10.
The RMS and STD of combined GALILEO ultra-rapid orbits.
Figure 10.
The RMS and STD of combined GALILEO ultra-rapid orbits.
Figure 11.
The RMS and STD of combined BDS ultra-rapid orbits.
Figure 11.
The RMS and STD of combined BDS ultra-rapid orbits.
Figure 12.
The RMS of GPS satellites for GFZ and COMB ultra-rapid orbit.
Figure 12.
The RMS of GPS satellites for GFZ and COMB ultra-rapid orbit.
Figure 13.
The RMS of GLONASS satellites for GFZ and COMB ultra-rapid orbit.
Figure 13.
The RMS of GLONASS satellites for GFZ and COMB ultra-rapid orbit.
Figure 14.
The RMS of GALILEO satellites for GFZ and COMB ultra-rapid orbit.
Figure 14.
The RMS of GALILEO satellites for GFZ and COMB ultra-rapid orbit.
Figure 15.
The RMS of BDS satellites for GFZ and COMB ultra-rapid orbit.
Figure 15.
The RMS of BDS satellites for GFZ and COMB ultra-rapid orbit.
Table 1.
Summarizes the detailed information on the orbit determination strategies, including the observation and dynamical models.
Table 1.
Summarizes the detailed information on the orbit determination strategies, including the observation and dynamical models.
| Item | Method |
|---|
| POD arc length | 30 h |
| Geopotential | EGM 2008 [21,28] |
| Relativity effect | IERS 2010 [29] |
| N-body gravitation | JPL DE405 ephemeris [30] |
| SRP Model | ECOM5 model, ECOM7 model, ECOM9 model [31,32] |
| Observation | Ionospheric Free (IF) Pseudo-range and carrier phase observations |
| Cut off ele | 7° |
| Troposphere model | Corrected with Saastamoinen model and global mapping function; residual zenith wet delays estimated with random walk noise [33,34,35] |
| Perturbation forces | Perturbation of nonspherical figure of the Earth, third body gravity, solid Earth tide, ocean tide, solar radiation [36,37] |
| EOP parameters | Estimation |
| PCO and PCV | IGS 2014 atx file [38] |
Table 2.
Mean SISURE of GPS satellites with different orbit types for mean analysis centers and combined orbits (Unit: mm).
Table 2.
Mean SISURE of GPS satellites with different orbit types for mean analysis centers and combined orbits (Unit: mm).
| SISURE | Block IIF | Block IIR | Block III |
|---|
| Mean ACs | 8.66 | 10.67 | 11.28 |
| Comb | 4.15 | 5.43 | 5.63 |
Table 3.
Mean RMS and STD between ultra-rapid and final orbit (unit: cm).
Table 3.
Mean RMS and STD between ultra-rapid and final orbit (unit: cm).
| SISURE | GPS | GLONASS | GAL | BDS MEO | BDS IGSO |
|---|
| RMS | 1.70 | 2.61 | 2.52 | 2.59 | 4.90 |
| STD | 2.20 | 2.90 | 2.50 | 2.70 | 2.90 |
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}